Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления транспортным средством и к способу управления транспортным средством для управления транспортным средством.
2. Описание предшествующего уровня техники
[0002] Публикация заявки на патент (Япония) номер 2010-280363 (JP 2010-280363 А) описывает устройство управления транспортным средством, которое управляет транспортным средством, имеющим двигатель внутреннего сгорания, который может переключаться между рабочим режимом и нерабочим режимом, чтобы выполнять движение накатом и с ускорением. Здесь, движение накатом и с ускорением, как описано в JP 2010-280363 А, представляет собой движение, выполняемое в заданной области скоростей транспортного средства посредством многократного чередования между движением с ускорением и движением накатом. В ходе движения с ускорением, двигатель внутреннего сгорания устанавливается в рабочий режим, так что транспортное средство управляется таким образом, что оно ускоряется с использованием движущей силы, полученной из выходной мощности двигателя и передаваемой на ведущее колесо. В ходе движения накатом, двигатель внутреннего сгорания устанавливается в нерабочий режим, так что транспортное средство движется накатом с использованием силы инерции.
[0003] Публикация заявки на патент (Япония) номер 2013-126806 (JP 2013-126806 А) также может быть приведена в качестве документа предшествующего уровня техники.
[0004] В JP 2010-280363 А, движение накатом и с ускорением выполняется для гибридного транспортного средства, имеющего двигатель внутреннего сгорания и электромотор, который выполнен с возможностью преобразования выходной мощности двигателя от двигателя внутреннего сгорания в мощность зарядки, которой заряжается аккумуляторная батарея (т.е. выполнен с возможностью генерирования мощности).
[0005] Здесь, когда транспортное средство выполняет движение накатом и с ускорением, электромотор преобразует выходную мощность двигателя в мощность зарядки в ходе движения с ускорением. Тем не менее, в зависимости от условий движения гибридного транспортного средства и т.д., величина мощности, накапливаемая в аккумуляторной батарее (величина накопления мощности), может снижаться постепенно, когда электромотор просто преобразует выходную мощность двигателя в мощность зарядки в ходе движения с ускорением. Величина накопления мощности может снижаться постепенно, когда, например, величина мощности (величина зарядки или другими словами, величина мощности, генерируемой посредством электромотора и не потребляемой посредством вспомогательного оборудования и т.п.), вновь накапливаемая в аккумуляторной батарее в ходе движения с ускорением, меньше величины мощности (величины разряда или, другими словами, величины мощности, потребляемой посредством вспомогательного оборудования и т.п.), вновь разряженной посредством аккумуляторной батареи в ходе движения накатом. Когда величина накопления мощности продолжает снижаться таким образом, величина накопления мощности может снижаться чрезмерно. Как результат, эффективность использования топлива транспортного средства может ухудшаться в соответствии с чрезмерным уменьшением величины накопления мощности.
[0006] Когда движение накатом и с ускорением завершается в транспортном средстве в состоянии, в котором величина накопления мощности снижена чрезмерно, например, уменьшенная величина накопления мощности означает то, что гибридное транспортное средство не может двигаться с использованием выходной мощности электромотора в то время, когда двигатель внутреннего сгорания устанавливается в нерабочий режим. Другими словами, гибридное транспортное средство не может двигаться в качестве так называемого электромобиля (EV). Как результат, эффективность использования топлива может ухудшаться, соответственно.
[0007] Когда движение накатом и с ускорением завершается в транспортном средстве в состоянии, в котором величина накопления мощности снижена чрезмерно, например, может быть необходимым установить двигатель внутреннего сгорания в рабочий режим просто для того, чтобы увеличивать величину накопления мощности. Как результат, эффективность использования топлива может ухудшаться, соответственно.
[0008] Когда движение накатом и с ускорением проводится в гибридном транспортном средстве, гибридное транспортное средство переключается с движения накатом на движение с ускорением посредством проворачивания двигателя внутреннего сгорания с использованием электромотора, например, чтобы переключать двигатель внутреннего сгорания с нерабочего режима на рабочий режим. Тем не менее, в состоянии, в котором величина накопления мощности снижена чрезмерно, может быть затруднительным проворачивать двигатель внутреннего сгорания с использованием электромотора. Соответственно, может быть затруднительным для гибридного транспортного средства продолжать движение накатом и с ускорением. Как результат, эффективность использования топлива может ухудшаться, соответственно.
[0009] Следует отметить, что ухудшение эффективности использования топлива, соответствующее чрезмерному уменьшению величины накопления мощности, не ограничено гибридным транспортным средством, имеющим двигатель внутреннего сгорания и электромотор, которые могут генерировать мощность, и может возникать аналогично в любом транспортном средстве, имеющем двигатель внутреннего сгорания и электромотор. Кроме того, ухудшение эффективности использования топлива, соответствующее чрезмерному уменьшению величины накопления мощности, не ограничено транспортным средством, которое принудительно многократно чередуется между движением с ускорением и движением накатом посредством переключения двигателя внутреннего сгорания между рабочим режимом и нерабочим режимом, и может возникать аналогично в любом транспортном средстве, которое многократно чередуется между движением с ускорением, при котором транспортное средство ускоряется с использованием выходной мощности двигателя, и движением накатом, при котором транспортное средство движется накатом без использования выходной мощности двигателя, независимо от того, переключается или нет двигатель внутреннего сгорания между рабочим режимом и нерабочим режимом.
Сущность изобретения
[0010] Изобретение предоставляет устройство управления транспортным средством и способ управления транспортным средством, с помощью которых может предпочтительно подавляться ухудшение эффективности использования топлива, вызываемое посредством уменьшения величины накопления мощности, возникающего, когда скорость транспортного средства поддерживается в предварительно определенной области скоростей посредством многократного чередования между движением с ускорением и движением накатом.
[0011] Первое аспект изобретения относится к устройству управления транспортным средством, которое управляет транспортным средством, включающим в себя двигатель внутреннего сгорания, модуль генерирования мощности, который преобразует, по меньшей мере, одну из: выходной мощности двигателя от двигателя внутреннего сгорания и кинетической энергии транспортного средства в электрическую мощность, и модуль накопления мощности, который накапливает электрическую мощность, преобразованную посредством модуля генерирования мощности. Устройство управления транспортным средством включает в себя: первый модуль управления, выполненный с возможностью управлять транспортным средством для многократного чередования между движением с ускорением, при котором транспортное средство ускоряется с использованием выходной мощности двигателя, и движением накатом, при котором транспортное средство движется накатом без использования выходной мощности двигателя, так что скорость транспортного средства поддерживается в предварительно определенной области скоростей; и второй модуль управления, выполненный с возможностью управлять модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, в котором транспортное средство выполняет движение накатом.
[0012] Согласно первому аспекту, модуль генерирования мощности может принудительно генерировать мощность в течение периода движения накатом в основном под управлением второго модуля управления. Другими словами, модуль накопления мощности заряжается в течение периода движения накатом. Следовательно, уменьшение величины накопления мощности в модуле накопления мощности (другими словами, величины мощности, накапливаемой в модуле накопления мощности) по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, предпочтительно может подавляться (или предотвращаться). Соответственно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
[0013] Второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина накопления мощности в модуле накопления мощности снижается в то время как транспортное средство многократно чередуется между движением с ускорением и движением накатом.
[0014] Согласно этой конфигурации, уменьшение величины накопления мощности в модуле накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, предпочтительно подавляется. Соответственно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
[0015] Второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности снижается, и (ii) невозможно увеличивать величину мощности, полученной посредством модуля генерирования мощности, посредством преобразования выходной мощности двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, с тем чтобы прекратить снижение величины накопления мощности.
[0016] Согласно этому аспекту, второй модуль управления управляет модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда невозможно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Другими словами, когда можно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, второй модуль управления не должен обязательно управлять модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности.
[0017] Второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности уменьшается, и (ii) эффективность силовой передачи транспортного средства, причем силовая передача включает в себя двигатель внутреннего сгорания, ухудшается, по меньшей мере, на предварительно определенную величину после того, как величина мощности, полученной посредством модуля генерирования мощности посредством преобразования выходной мощности двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, увеличивается, с тем чтобы прекратить снижение величины накопления мощности.
[0018] Как описано выше, когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, модуль генерирования мощности может подавлять уменьшение величины накопления мощности посредством увеличения величины мощности, генерируемой в течение периода ускорения. Величина генерирования мощности типично увеличивается посредством увеличения выходной мощности двигателя. Тем не менее, увеличение выходной мощности двигателя приводит к варьированию рабочей точки двигателя внутреннего сгорания, и когда рабочая точка двигателя внутреннего сгорания модифицируется, эффективность силовой передачи транспортного средства, причем силовая передача включает в себя двигатель внутреннего сгорания, варьируется (например, ухудшается). Когда эффективность силовой передачи варьируется (например, ухудшается), эффективность использования топлива транспортного средства варьируется (например, ухудшается). Следовательно, когда величина мощности, генерируемой в течение периода ускорения, увеличивается, чтобы подавлять ухудшение эффективности использования топлива вследствие чрезмерного уменьшения величины накопления мощности, эффективность силовой передачи может ухудшаться, что вызывает еще большее ухудшение эффективности использования топлива.
[0019] Согласно вышеописанной конфигурации, второй модуль управления управляет модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда эффективность силовой передачи ухудшается, по меньшей мере, на предварительно определенную величину после того, как величина мощности, генерируемой в течение периода ускорения, увеличивается, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности и ухудшения эффективности использования топлива транспортного средства вследствие ухудшения эффективности силовой передачи.
[0020] В ходе движения с ускорением, двигатель внутреннего сгорания может устанавливаться в рабочий режим, а в ходе движения накатом, двигатель внутреннего сгорания может устанавливаться в нерабочий режим. В этом случае, второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности для преобразования кинетическую энергию в электрическую мощность в течение, по меньшей мере, части периода движения накатом.
[0021] Согласно этой конфигурации, уменьшение величины накопления мощности в модуле накопления мощности предпочтительно подавляется по мере того, как транспортное средство многократно чередуется между движением с ускорением, при котором двигатель внутреннего сгорания находится в рабочем режиме, и движением накатом, при котором двигатель внутреннего сгорания находится в нерабочем режиме. Соответственно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
[0022] Второй аспект изобретения относится к способу управления транспортным средством для управления транспортным средством, включающим в себя двигатель внутреннего сгорания, модуль генерирования мощности, который преобразует, по меньшей мере, одну из: выходной мощности двигателя от двигателя внутреннего сгорания и кинетической энергии транспортного средства в электрическую мощность, и модуль накопления мощности, который накапливает электрическую мощность, преобразованную посредством модуля генерирования мощности. Способ управления транспортным средством включает в себя: управление транспортным средством для многократного чередования между движением с ускорением, при котором транспортное средство ускоряется с использованием выходной мощности двигателя, и движением накатом, при котором транспортное средство движется накатом без использования выходной мощности двигателя, так что скорость транспортного средства поддерживается в предварительно определенной области скоростей; и управление модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, в котором транспортное средство выполняет движение накатом.
[0023] Согласно второму аспекту, аналогично первому аспекту, ухудшение эффективности использования топлива транспортного средства, вызываемое посредством чрезмерного уменьшения величины накопления мощности в модуле накопления мощности, предпочтительно подавляется.
Краткое описание чертежей
[0024] Признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения описываются ниже со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, показывающей пример конфигурации гибридного транспортного средства согласно варианту осуществления;
Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций первого примерного режима работы гибридного транспортного средства согласно этому варианту осуществления (более конкретно, первого примерного режима работы гибридного транспортного средства в ходе движения накатом и с ускорением);
Фиг. 3 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и состояние зарядки (SOC) аккумулятора в случае, если гибридное транспортное средство выполняет движение накатом и с ускорением;
Фиг. 4 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством увеличения величины генерирования мощности MG1 в соответствии с первым примерным режимом работы;
Фиг. 5 является первым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии с первым примерным режимом работы;
Фиг. 6 является вторым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии с первым примерным режимом работы;
Фиг. 7 является блок-схемой последовательности операций способа, показывающей последовательность операций второго примерного режима работы гибридного транспортного средства согласно этому варианту осуществления (более конкретно, второго примерного режима работы гибридного транспортного средства в ходе движения накатом и с ускорением);
Фиг. 8 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, эффективность силовой передачи, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством увеличения величины генерирования мощности MG1 в соответствии со вторым примерным режимом работы;
Фиг. 9 является первым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии со вторым примерным режимом работы;
Фиг. 10 является вторым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии со вторым примерным режимом работы; и
Фиг. 11 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, эффективность силовой передачи, выходную мощность электромотора, величину генерирования мощности MG1, величину генерирования мощности MG2 и SOC аккумулятора в случае, если чрезмерное уменьшение SOC подавляется посредством увеличения величины генерирования мощности MG1 в соответствии с первым примерным режимом работы в ситуации, в которой двигатель ENG остается в рабочем режиме в течение периода движения накатом.
Подробное описание вариантов осуществления
[0025] Ниже описывается вариант осуществления устройства управления транспортным средством согласно изобретению со ссылкой на чертежи. Следует отметить, что в нижеприведенном описании, устройство управления транспортным средством согласно этому варианту осуществления изобретения применяется к гибридному транспортному средству 10.
[0026] Во-первых, ссылаясь на Фиг. 1, описывается конфигурация гибридного транспортного средства 10 согласно этому варианту осуществления. Здесь, Фиг. 1 является блок-схемой, показывающей пример конфигурации гибридного транспортного средства 10 согласно этому варианту осуществления.
[0027] Как показано на Фиг. 1, гибридное транспортное средство 10 включает в себя ось 11, колеса 12 транспортного средства, электронный модуль 100 управления (ECU), служащий в качестве конкретного примера "устройства управления транспортным средством", двигатель ENG, служащий в качестве конкретного примера "двигателя внутреннего сгорания", электромотор-генератор MG1, служащий в качестве конкретного примера "модуля генерирования мощности (средства генерирования мощности)", электромотор-генератор MG2, служащий в качестве конкретного примера "модуля генерирования мощности (средства генерирования мощности)", механизм 300 деления мощности, инвертор 400 и аккумулятор 500, служащий в качестве конкретного примера "модуля накопления мощности (средства накопления мощности)".
[0028] Ось 11 представляет собой передаточный вал для передачи мощности, выводимой из двигателя ENG и электромотора-генератора MG2, на колеса транспортного средства. Колеса 12 транспортного средства представляют собой средство для передачи мощности, передаваемой на них через ось 11, на поверхность дороги.
[0029] ECU 100 выполнен с возможностью управлять общей работой гибридного транспортного средства 10. В этом варианте осуществления, в частности, ECU 100 включает в себя, в качестве физически реализованных схемных элементов или в качестве логически реализованных блоков обработки внутри ECU 100, первый модуль 101 управления, служащий в качестве конкретного примера "первого модуля управления (первого средства управления)", второй модуль 102 управления, служащий в качестве конкретного примера "второго модуля управления (второго средства управления)", и третий модуль 103 управления, служащий в качестве конкретного примера "третьего модуля управления (третьего средства управления)".
[0030] Первый модуль 101 управления в основном управляет общей работой гибридного транспортного средства 10. В частности, первый модуль 101 управления управляет гибридным транспортным средством 10 таким образом, что гибридное транспортное средство 10 выполняет движение накатом и с ускорением (другими словами, перемежающееся движение). Второй модуль 102 управления в основном управляет генерированием мощности (другими словами, рекуперацией мощности) посредством электромотора-генератора MG2 в течение периода движения накатом, в котором гибридное транспортное средство 10 выполняет движение накатом, по мере необходимости совместно с первым модулем 101 управления. Третий модуль 103 управления в основном управляет генерированием мощности посредством электромотора-генератора MG1 в течение периода ускорения, в котором гибридное транспортное средство 10 выполняет движение с ускорением, по мере необходимости совместно с первым модулем 101 управления. Следует отметить, что движение накатом и с ускорением подробно описывается ниже со ссылкой на Фиг. 2 и т.д. и, следовательно, не описывается подробно здесь.
[0031] Двигатель ENG приводится в действие (т.е. работает) посредством сжигания топлива, такого как бензиновое или дизельное топливо. Двигатель ENG выступает в качестве основного источника мощности гибридного транспортного средства 10. Помимо этого, двигатель ENG выступает в качестве источника мощности для вращения (т.е. приведения в действие) вращательного вала электромотора-генератора MG1, который описывается ниже.
[0032] Электромотор-генератор MG1 выступает в качестве генератора мощности, используемого для того, чтобы заряжать аккумулятор 500. Когда электромотор-генератор MG1 выступает в качестве генератора мощности, вращательный вал электромотора-генератора MG1 вращается посредством мощности из двигателя ENG. Тем не менее, следует отметить, что посредством приведения в действие электромотора-генератора MG1 с использованием мощности, накапливаемой в аккумуляторе 500, электромотор-генератор MG1 может выступать в качестве электромотора, который подает мощность в гибридное транспортное средство 10.
[0033] Электромотор-генератор MG2 приводится в действие с использованием мощности, накапливаемой в аккумуляторе 500, так что он выступает в качестве электромотора, который подает мощность в гибридное транспортное средство 10. Помимо этого, электромотор-генератор MG2 выступает в качестве генератора мощности, используемого для того, чтобы заряжать аккумулятор 500. Когда электромотор-генератор MG2 выступает в качестве генератора мощности, вращательный вал электромотора-генератора MG2 вращается посредством мощности, передаваемой в электромотор-генератор MG2 от оси 11.
[0034] Механизм 300 деления мощности представляет собой планетарную зубчатую передачу, имеющую солнечную шестерню, водило планетарной передачи, ведущую шестерню и коронную шестерню, при этом ни одно из означенного не показано на чертеже. Вращательный вал солнечной шестерни соединяется, например, с вращательным валом электромотора-генератора MG1. Вращательный вал коронной шестерни соединяется, например, с вращательным валом электромотора-генератора MG2. Вращательный вал водила планетарной передачи, размещаемого между солнечной шестерней и коронной шестерней, соединяется, например, с вращательным валом (другими словами, коленчатым валом) двигателя ENG. Вращение двигателя ENG передается на солнечную шестерню и коронную шестерню посредством водила планетарной передачи и ведущей шестерни. Другими словами, мощность двигателя ENG распределена между двумя системами. В гибридном транспортном средстве 10, вращательный вал коронной шестерни соединяется с осью 11 гибридного транспортного средства 10 таким образом, что движущая сила передается на колеса 12 транспортного средства через ось 11.
[0035] Инвертор 400 преобразует мощность постоянного тока, извлеченную из аккумулятора 500, в мощность переменного тока и подает мощность переменного тока в электромотор-генератор MG1 и электромотор-генератор MG2. Дополнительно, инвертор 400 преобразует мощность переменного тока, сформированную посредством электромотора-генератора MG1 и электромотора-генератора MG2, в мощность постоянного тока и подает мощность постоянного тока в аккумулятор 500. Следует отметить, что инвертор 400 может быть сконфигурирован как часть так называемого модуля управления мощностью (PCU).
[0036] Аккумулятор 500 представляет собой источник мощности, который подает мощность для приведения в действие электромотора-генератора MG1 и электромотора-генератора MG2 в электромотор-генератор MG1 и электромотор-генератор MG2. Аккумулятор 500 представляет собой заряжаемую аккумуляторную батарею.
[0037] Следует отметить, что аккумулятор 500 может быть заряжен посредством приема подачи мощности из источника мощности снаружи относительно гибридного транспортного средства 10. Другими словами, гибридное транспортное средство 10 может представлять собой так называемое гибридное транспортное средство со штепсельным соединением для зарядки от внешнего источника.
[0038] Далее, ссылаясь на Фиг. 2-5, описывается работа гибридного транспортного средства 10 (в частности, работа гибридного транспортного средства 10 в ходе движения накатом и с ускорением). Следует отметить, что два примерных режима работы (первый и второй примерный режим работы) описываются ниже в качестве примерных режимов работы гибридного транспортного средства 10.
[0039] Во-первых, ссылаясь на Фиг. 2, описывается первый примерный режим работы гибридного транспортного средства 10 (более конкретно, первый примерный режим работы гибридного транспортного средства 10 в ходе движения накатом и с ускорением). Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций первого примерного режима работы гибридного транспортного средства 10 (более конкретно, первого примерного режима работы гибридного транспортного средства 10 в ходе движения накатом и с ускорением).
[0040] Как показано на Фиг. 2, первый модуль 101 управления определяет то, выполняет или нет гибридное транспортное средство 10 движение накатом и с ускорением (этап S101).
[0041] "Движение накатом и с ускорением" согласно этому варианту осуществления представляет собой движение, выполняемое посредством гибридного транспортного средства 10 посредством многократного чередования между движением с ускорением и движением накатом таким образом, что скорость транспортного средства гибридного транспортного средства 10 поддерживается в предварительно определенной области скоростей. Другими словами, "движение накатом и с ускорением" представляет собой движение, выполняемое посредством гибридного транспортного средства 10 посредством многократного чередования между движением с ускорением и движением накатом таким образом, что скорость транспортного средства гибридного транспортного средства 10 поддерживается равной практически постоянной целевой скорости.
[0042] В ходе движения с ускорением, двигатель ENG устанавливается в рабочий режим, и гибридное транспортное средство 10 движется посредством движения за счет мощности (типично ускорения) с использованием выходной мощности двигателя от двигателя ENG в рабочем режиме. Когда двигатель ENG находится в рабочем режиме, двигатель ENG работает посредством потребления топлива. Как результат, выходная мощность двигателя от двигателя ENG прикладывается к коленчатому валу.
[0043] С другой стороны, в ходе движения накатом, двигатель ENG устанавливается в нерабочий режим, и гибридное транспортное средство 10 движется накатом без использования выходной мощности двигателя от двигателя ENG. Когда двигатель ENG находится в нерабочем режиме, двигатель ENG не потребляет топливо. Другими словами, когда двигатель ENG находится в нерабочем режиме, двигатель ENG не работает. Как результат, выходная мощность двигателя от двигателя ENG не прикладывается к коленчатому валу. Другими словами, двигатель ENG не прикладывает тормозной крутящий момент, соответствующий тормозному двигателю, к коленчатому валу. В этом случае, коленчатый вал может находиться в холостом режиме.
[0044] В ходе движения с ускорением, расход топлива увеличивается относительно, тогда как в ходе движения накатом, расход топлива либо уменьшается относительно, либо падает до нуля. Следовательно, при условии, что уменьшение расхода топлива в ходе движения накатом превышает увеличение расхода топлива в ходе движения с ускорением, эффективность использования топлива гибридного транспортного средства 10 в ходе движения накатом и с ускорением превосходит эффективность использования топлива гибридного транспортного средства 10, когда движение накатом и с ускорением не выполняется.
[0045] Первый модуль 101 управления может определять то, выполняет или нет гибридное транспортное средство 10 движение накатом и с ускорением для гибридного транспортного средства 10, посредством мониторинга инструкций, выданных пользователем (например, водителем или пассажиром) гибридного транспортного средства 10. Например, первый модуль 101 управления может определять то, что движение накатом и с ускорением должно выполняться в гибридном транспортном средстве 10, когда пользователь разрешает движение накатом и с ускорением посредством нажатия функциональной кнопки, предоставленной в гибридном транспортном средстве 10. Тем не менее, следует отметить, что первый модуль 101 управления может определять то, выполняет или нет гибридное транспортное средство 10 движение накатом и с ускорением, с использованием другого способа.
[0046] Когда в качестве результата определения этапа S101 определяется то, что движение накатом и с ускорением не должно выполняться в гибридном транспортном средстве 10 (этап S101: "Нет"), первый модуль 101 управления завершает операцию, показанную на Фиг. 2. В этом случае, первый модуль 101 управления может выполнять операцию этапа S101 на Фиг. 2 снова после фиксированного периода.
[0047] С другой стороны, когда в качестве результата определения этапа S101 определяется то, что движение накатом и с ускорением должно выполняться для гибридного транспортного средства 10 (этап S101: "Да"), первый модуль 101 управления определяет то, является или нет мощность, запрашиваемая пользователем относительно гибридного транспортного средства 10 (упоминается далее в качестве "запрашиваемой пользователем мощности"), практически постоянной (этап S102). Причина этого заключается в том, что движение накатом и с ускорением, как описано выше, выполняется в гибридном транспортном средстве 10 посредством многократного чередования между движением с ускорением и движением накатом по инерции таким образом, что скорость транспортного средства поддерживается в предварительно определенной области скоростей, и, следовательно, когда запрашиваемая пользователем мощность не является постоянной, скорость транспортного средства с большей вероятностью варьируется (другими словами, скорость транспортного средства с меньшей вероятностью остается в предварительно определенной области скоростей), затрудняя для гибридного транспортного средства 10 выполнение движения накатом и с ускорением.
[0048] Первый модуль 101 управления может определять то, является или нет запрашиваемая пользователем мощность практически постоянной, на основе величины, на которую нажимает педаль акселератора пользователь. Например, когда величина, на которую нажимает педаль акселератора пользователь, является практически постоянной, первый модуль 101 управления может определять то, что запрашиваемая пользователем мощность является практически постоянной. Альтернативно, первый модуль 101 управления может определять то, является или нет запрашиваемая пользователем мощность практически постоянной, посредством определения того, проводится или нет автоматическое оптимальное регулирование скорости, при котором гибридное транспортное средство10 принудительно движется автоматически с требуемой скоростью движения в режиме оптимального регулирования скорости, в дополнение или вместо определения того, является или нет рабочая величина нажатия педали акселератора практически постоянной. Например, когда автоматическое оптимальное регулирование скорости проводится, первый модуль 101 управления может определять то, что запрашиваемая пользователем мощность является практически постоянной. Тем не менее, следует отметить, что первый модуль 101 управления может определять то, является или нет запрашиваемая пользователем мощность практически постоянной, с использованием другого способа.
[0049] Когда в качестве результата определения этапа S102 определяется то, что запрашиваемая пользователем мощность не является постоянной (этап S102: "Нет"), первый модуль 101 управления завершает операцию, показанную на Фиг. 2. В этом случае, первый модуль 101 управления может выполнять операцию этапа S101 на Фиг. 2 снова после фиксированного периода.
[0050] С другой стороны, когда в качестве результата определения этапа S102 определяется то, что запрашиваемая пользователем мощность является постоянной (этап S102: "Да"), первый модуль 101 управления управляет гибридным транспортным средством 10 таким образом, чтобы выполнять движение накатом и с ускорением (этап S103).
[0051] Здесь, ссылаясь на Фиг. 3, описывается движение накатом и с ускорением. Фиг. 3 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением.
[0052] Как показано на Фиг. 3, когда запрашиваемая пользователем мощность является практически постоянной, гибридное транспортное средство 10 выполняет движение накатом и с ускорением. Другими словами, гибридное транспортное средство 10 многократно чередуется между движением с ускорением и движением накатом таким образом, что скорость транспортного средства поддерживается в предварительно определенной области скоростей.
[0053] Более конкретно, в течение периода ускорения, в котором гибридное транспортное средство 10 выполняет движение с ускорением, первый модуль 101 управления управляет двигателем ENG (а также электромоторами/генераторами MG1 и MG2) таким образом, что двигатель ENG устанавливается в рабочий режим. Соответственно, двигатель ENG выводит требуемую выходную мощность двигателя в течение периода ускорения. Помимо этого, первый модуль 101 управления управляет электромотором-генератором MG2 таким образом, что электромотор-генератор MG2 приводится в действие с использованием мощности, накапливаемой в аккумуляторе 500 в течение периода ускорения. Соответственно, электромотор-генератор MG2 выводит требуемую выходную мощность электромотора в течение периода ускорения.
[0054] Тем не менее, следует отметить, что первый модуль 101 управления может управлять электромотором-генератором MG2 таким образом, что электромотор-генератор MG2 не приводится в действие с использованием мощности, накапливаемой в аккумуляторе 500 в течение периода ускорения. Другими словами, первый модуль 101 управления может управлять электромотором-генератором MG2 таким образом, что в течение периода ускорения, электромотор-генератор MG2 вращается вхолостую без использования мощности, накапливаемой в аккумуляторе 500. Как результат, выходная мощность электромотора может падать до нуля в течение периода ускорения.
[0055] Выходная мощность электромотора и часть выходной мощности двигателя служат в качестве мощности, используемой посредством гибридного транспортного средства 10 для того, чтобы выполнять движение за счет мощности (типично ускорение). Как результат, скорость транспортного средства постепенно увеличивается в течение периода ускорения. Между тем, оставшаяся часть выходной мощности двигателя служит в качестве мощности для принуждения электромотора-генератора MG1 функционировать в качестве генератора мощности. В этом случае, электромотор-генератор MG1 преобразует оставшуюся часть выходной мощности двигателя в электрическую мощность под управлением третьего модуля 103 управления, который работает совместно с первым модулем 101 управления по мере необходимости. Как результат, величина генерирования мощности MG1 принимает большее значение, чем нуль, в течение периода ускорения. Мощность, генерируемая посредством электромотора-генератора MG1, заряжена в аккумулятор 500. Соответственно, SOC аккумулятора 500 постепенно увеличивается в течение периода ускорения.
[0056] С другой стороны, в течение периода движения накатом, в котором гибридное транспортное средство 10 выполняет движение накатом, первый модуль 101 управления управляет двигателем ENG (а также электромоторами/генераторами MG1 и MG2) таким образом, что двигатель ENG устанавливается в нерабочий режим. Как результат, выходная мощность двигателя падает до нуля в течение периода движения накатом. Помимо этого, первый модуль 101 управления управляет электромотором-генератором MG2 таким образом, что в течение периода движения накатом, электромотор-генератор MG2 вращается вхолостую без использования мощности, накапливаемой в аккумуляторе 500. Как результат, выходная мощность электромотора падает до нуля в течение периода движения накатом. Соответственно, скорость транспортного средства постепенно снижается в течение периода движения накатом.
[0057] В течение периода движения накатом, электромоторы/генераторы MG1 и MG2 не выступают в качестве генераторов мощности, за исключением случаев, когда выполняется операция, которая подробно описывается ниже (более конкретно, операция этапа S107 на Фиг. 2). Тем не менее, даже в течение периода движения накатом, мощность, накапливаемая в аккумуляторе 500, потребляется, чтобы приводить в действие вспомогательное оборудование, предоставленное в гибридном транспортном средстве 10, и, следовательно, SOC аккумулятора 500 постепенно уменьшается в течение периода движения накатом.
[0058] Гибридное транспортное средство 10 многократно чередуется между движением с ускорением и движением накатом, описанными выше, под управлением первого модуля 101 управления таким образом, что скорость транспортного средства поддерживается в предварительно определенной области скоростей. Как результат, как показано на Фиг. 3, гибридное транспортное средство 10 движется на скорости транспортного средства в предварительно определенной области скоростей.
[0059] В этой связи, в примере, показанном на Фиг. 3, достигается равновесие между величиной мощности, вводимой в аккумулятор 500 (другими словами, величиной зарядки или увеличением SOC) в течение периода ускорения, и величиной мощности, выводимой из аккумулятора 500 (другими словами, величиной разряда или уменьшением SOC) в течение периода движения накатом. Следовательно, в примере, показанном на Фиг. 3, SOC постепенно не снижается в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением. Другими словами, SOC поддерживается в пределах практически фиксированной области SOC в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением. Иначе говоря, среднее значение (типично среднее значение в единицу времени) SOC остается практически постоянным в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением.
[0060] Тем не менее, в зависимости от условий движения гибридного транспортного средства 10, увеличение SOC в течение периода ускорения может падать ниже уменьшения SOC в течение периода движения накатом. Например, когда величина генерирования мощности MG1 является относительно небольшой, или величина мощности, потребляемая посредством вспомогательного оборудования, является относительно большой в течение периода ускорения, увеличение SOC в течение периода ускорения с относительно большей вероятностью падает ниже уменьшения SOC в течение периода движения накатом. В этом случае, SOC постепенно снижается в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением. Другими словами, среднее значение SOC постепенно снижается в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением. Соответственно, SOC отклоняется от практически фиксированной области SOC в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением, и как результат, SOC может снижаться чрезмерно (т.е. становиться чрезмерно небольшим). Чрезмерное уменьшение SOC в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением, может приводить к ухудшению эффективности использования топлива гибридного транспортного средства 10. Следовательно, с точки зрения подавления ухудшения эффективности использования топлива в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением, предпочтительно предотвращается чрезмерное снижение SOC, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением.
[0061] Следовательно, в этом варианте осуществления, второй модуль 102 управления управляет электромотором-генератором MG2 для генерирования (или другими словами, рекуперации) мощности с использованием кинетической энергии гибридного транспортного средства 10 в течение периода движения накатом по мере необходимости, с тем чтобы предотвращать чрезмерное снижение SOC в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением. Ниже подробно описывается операция для управления электромотором-генератором MG2 рекуперации мощность в течение периода движения накатом.
[0062] Снова ссылаясь на Фиг. 2, в то время, когда гибридное транспортное средство 10 выполняет движение накатом и с ускорением, первый модуль 101 управления определяет то, удовлетворяет или нет SOC аккумулятора 500 предварительно определенному условию снижения (этап S104).
[0063] В этом варианте осуществления, предварительно определенное условие снижения предположительно должно удовлетворяться, когда "уменьшение SOC в единицу времени равно или превышает первое пороговое значение". Более конкретно, предварительно определенное условие снижения предпочтительно задано таким образом, что оно удовлетворяется, когда "уменьшение SOC в единицу времени после выполнения движения с ускорением и движения накатом, по меньшей мере, по одному разу равно или превышает первое пороговое значение". Другими словами, предварительно определенное условие снижения предпочтительно задано таким образом, что оно удовлетворяется, когда "уменьшение SOC из SOC в начале определенного периода движения с ускорением до конца периода движения накатом после периода движения с ускорением равно или превышает первое пороговое значение". SOC с большей вероятностью чрезмерно снижается тогда, когда SOC удовлетворяет предварительно определенному условию снижения, чем тогда, когда SOC не удовлетворяет предварительно определенному условию снижения.
[0064] Следует отметить, что любое условие, посредством которого можно предпочтительно определять то, возникает или нет чрезмерное уменьшение SOC с относительно большой вероятностью, либо то, возникло или нет чрезмерное уменьшение SOC с относительно большой вероятностью, может использоваться в качестве предварительно определенного условия снижения. Например, предварительно определенное условие снижения может задаваться таким образом, что оно удовлетворяется, когда увеличение SOC в течение периода ускорения меньше уменьшения SOC в течение периода движения накатом. Дополнительно, например, предварительно определенное условие снижения может задаваться таким образом, что оно удовлетворяется, когда SOC (типично среднее значение SOC) снижается за период, требуемый для того, чтобы выполнять движение с ускорением и движение накатом, по меньшей мере, по одному разу. Дополнительно, например, предварительно определенное условие снижения может задаваться таким образом, что оно удовлетворяется, когда соотношение уменьшения SOC в течение периода движения накатом относительно увеличения SOC в течение периода ускорения равно или превышает предварительно определенное соотношение, большее единицы. Дополнительно, например, предварительно определенное условие снижения может задаваться таким образом, что оно удовлетворяется, когда SOC чрезмерно снижено (например, когда SOC падает или находится ниже второго порогового значения).
[0065] Когда в качестве результата определения этапа S104 определяется то, что SOC аккумулятора 500 не удовлетворяет предварительно определенному условию снижения (этап S104: "Нет"), вероятность чрезмерного уменьшения SOC является почти или абсолютно несуществующей. Соответственно, второй модуль 102 управления не должен обязательно управлять электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Другими словами, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность с использованием части выходной мощности двигателя для периода ускорения (этап S109).
[0066] С другой стороны, когда в качестве результата определения этапа S104 определяется то, что SOC аккумулятора 500 удовлетворяет предварительно определенному условию снижения (этап S104: "Да"), вероятность чрезмерного уменьшения SOC является относительно высокой. Следовательно, предпочтительно предпринимаются меры для того, чтобы подавлять чрезмерное уменьшение SOC.
[0067] В этой связи, чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом, как описано выше. Тем не менее, когда осуществляется рекуперации мощности посредством электромотора-генератора MG2 в течение периода движения накатом, продолжительность периода движения накатом уменьшается. Когда продолжительность периода движения накатом уменьшается, преимущество повышения эффективности использования топлива посредством выполнения движения накатом и с ускорением может ослабляться или нивелироваться. Следовательно, чтобы максимизировать преимущество повышения эффективности использования топлива посредством выполнения движения накатом и с ускорением, рекуперация мощности посредством электромотора-генератора MG2 в течение периода движения накатом предпочтительно не допускается в максимально возможной степени.
[0068] С другой стороны, чрезмерное уменьшение SOC также может подавляться посредством увеличения величины генерирования мощности MG1 для периода ускорения. Следует отметить, что здесь "увеличение величины генерирования мощности MG1 для периода ускорения" означает задание величины генерирования мощности MG1 для периода ускорения в случае, если управление выполняется для того, чтобы подавлять чрезмерное уменьшение SOC, превышающей величину генерирования мощности MG1 для периода ускорения в случае, если управление не выполняется для того, чтобы подавлять чрезмерное уменьшение SOC (т.е. увеличение величины генерирования мощности MG1). Следовательно, в этом варианте осуществления, первый модуль 101 управления сначала определяет то, можно или нет подавлять чрезмерное уменьшение SOC посредством увеличения величины генерирования мощности MG1 для периода ускорения. Более конкретно, первый модуль 101 управления определяет то, можно или нет увеличивать величину генерирования мощности MG1 для периода ускорения (этап S105). В это время, первый модуль 101 управления определяет то, можно или нет увеличивать величину генерирования мощности MG1 для периода ускорения до точки, в которой SOC больше не удовлетворяет предварительно определенному условию снижения (типично до точки, в которой SOC поддерживается в пределах фиксированной области SOC или постепенно увеличивается) (этап S105).
[0069] Величина генерирования мощности MG1 определяется, например, в соответствии с рабочей точкой (рабочей точкой MG1) электромотора-генератора MG1. Рабочая точка MG1 указывается посредством частоты вращения (частоты вращения MG1) электромотора-генератора MG1, и крутящего момента (крутящего момента MG1), приложенного к вращательному валу электромотора-генератора MG1. Частота вращения MG1 и крутящий момент MG1 определяются в основном в соответствии с рабочей точкой (рабочей точкой ENG) двигателя ENG. Соответственно, первый модуль 101 управления может определять то, можно или нет модифицировать рабочую точку MG1 таким образом, что величина генерирования мощности MG1 для периода ускорения увеличивается посредством модификации рабочей точки ENG. Когда определяется то, что можно модифицировать рабочую точку MG1 таким образом, что величина генерирования мощности MG1 для периода ускорения увеличивается посредством модификации рабочей точки ENG, первый модуль 101 управления может определять то, что можно увеличивать величину генерирования мощности MG1 в течение периода ускорения.
[0070] Величина генерирования мощности MG1 типично зачастую увеличивается посредством увеличения выходной мощности двигателя. Следует отметить, что здесь "увеличение выходной мощности двигателя" означает задание выходной мощности двигателя (более конкретно, выходной мощности двигателя для периода ускорения) в случае, если управление выполняется для того, чтобы подавлять чрезмерное уменьшение SOC, превышающей выходную мощность двигателя (более конкретно, выходную мощность двигателя для периода ускорения) в случае, если управление не выполняется для того, чтобы подавлять чрезмерное уменьшение SOC (т.е. увеличение выходной мощности двигателя). Первый модуль 101 управления, следовательно, может определять то, разрешается или нет увеличение выходной мощности двигателя таким образом, что величина генерирования мощности MG1 для периода ускорения увеличивается. Когда разрешается увеличение выходной мощности двигателя таким образом, что величина генерирования мощности MG1 для периода ускорения увеличивается, первый модуль 101 управления может определять то, что разрешается увеличение величины генерирования мощности MG1 в течение периода ускорения.
[0071] Когда в качестве результата определения этапа S105 определяется то, что можно увеличивать величину генерирования мощности MG1 в течение периода ускорения (этап S105: "Да"), первый модуль 101 управления дополнительно определяет то, превышает или нет увеличенная величина генерирования мощности MG1 верхнее предельное значение (так называемое предельное значение Win) величины мощности, которая может вводиться в аккумулятор 500 (этап S106). Другими словами, первый модуль 101 управления определяет то, превышает или нет величина генерирования мощности MG1 предельное значение Win после увеличения до точки, в которой SOC больше не удовлетворяет предварительно определенному условию снижения (этап S106).
[0072] Когда в качестве результата определения этапа S106 определяется то, что увеличенная величина генерирования мощности MG1 не превышает (т.е. не превышает) предельное значение Win (этап S106: "Нет"), это означает то, что вся мощность, генерируемая посредством электромотора-генератора MG1 в течение периода ускорения (исключая мощность, которая потеряна), может вводиться в аккумулятор 500 даже после того, как величина генерирования мощности MG1 увеличивается до точки, в которой SOC больше не удовлетворяет предварительно определенному условию снижения. Другими словами, чрезмерное уменьшение SOC предпочтительно подавляется с использованием мощности, генерируемой посредством электромотора-генератора MG1 в течение периода ускорения. Соответственно, второй модуль 102 управления не должен обязательно управлять электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. В этом случае, третий модуль 103 управления увеличивает величину генерирования мощности MG1 посредством ENG управления двигателем, с тем чтобы увеличивать выходную мощность двигателя для периода ускорения (или варьировать рабочую точку двигателя ENG) (этап S108). Как результат, величина генерирования мощности MG1 для периода ускорения увеличивается. Кроме того, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность с использованием части выходной мощности двигателя (т.е. увеличенной выходной мощности двигателя) в течение периода ускорения (этап S109).
[0073] С другой стороны, когда в качестве результата определения этапа S106 определяется то, что увеличенная величина генерирования мощности MG1 (т.е. превышает) превышает предельное значение Win (этап S106: "Да"), это означает то, что часть мощности, генерируемой посредством электромотора-генератора MG1 в течение периода ускорения, не вводится в аккумулятор 500 после того, как величина генерирования мощности MG1 увеличивается до точки, в которой SOC больше не удовлетворяет предварительно определенному условию снижения. Другими словами, чрезмерное уменьшение SOC не подавляется предпочтительно с использованием только мощности, генерируемой посредством электромотора-генератора MG1 в течение периода ускорения. Следовательно, в этом случае третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, и помимо этого, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом (этап S107).
[0074] Следует отметить, что для того, чтобы минимизировать уменьшение продолжительности периода движения накатом, когда электромотор-генератор MG2 управляется для рекуперации мощности в течение периода движения накатом, второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, чтобы минимизировать величину генерирования мощности MG2 для периода движения накатом. Например, третий модуль 103 управления может максимизировать величину генерирования мощности MG1 при обеспечении того, что увеличенная величина генерирования мощности MG1 не превышает предельное значение Win. Другими словами, третий модуль 103 управления может управлять двигателем ENG таким образом, чтобы увеличивать выходную мощность двигателя для периода ускорения (или варьировать рабочую точку двигателя ENG) до точки, в которой максимизируется величина генерирования мощности MG1 для периода ускорения. Как результат, величина генерирования мощности MG1 для периода ускорения максимизируется. Дополнительно, второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, что недостаток в величине генерирования мощности MG1 для периода ускорения вследствие предельного значения Win компенсируется посредством величины генерирования мощности MG2 для периода движения накатом. Другими словами, второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, что величина мощности, которая совпадает с недостатком в величине генерирования мощности MG1 для периода ускорения вследствие предельного значения Win, рекуперируется посредством электромотора-генератора MG2 в течение периода движения накатом.
[0075] С другой стороны, когда в качестве результата определения этапа S105 определяется то, что невозможно увеличивать величину генерирования мощности MG1 в течение периода ускорения (этап S105: "Нет"), это означает то, что чрезмерное уменьшение SOC не может легко подавляться с использованием только величины генерирования мощности MG1 для периода ускорения. Соответственно, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, и помимо этого, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом (этап S107). Тем не менее, следует отметить, что поскольку определяется в этом случае, что невозможно увеличивать величину генерирования мощности MG1 (типично, что невозможно увеличивать выходную мощность двигателя) в течение периода ускорения, третий модуль 103 управления не должен увеличивать выходную мощность двигателя для периода ускорения до точки, в которой максимизируется величина генерирования мощности MG1 для периода ускорения.
[0076] Второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, чтобы продолжать рекуперацию мощности в течение периода движения накатом при условии, что SOC остается в относительно уменьшенном состоянии. Например, второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, чтобы продолжать рекуперацию мощности в течение периода движения накатом до тех пор, пока SOC не будет равно или превышать третье пороговое значение. В точке, в которой SOC равно или превышает третье пороговое значение, второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, чтобы прекращать рекуперацию мощности в течение периода движения накатом. После этого, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом снова, когда SOC снова определено как удовлетворяющее предварительно определенному условию снижения.
[0077] Здесь, ссылаясь на Фиг. 4-6, подробнее описывается способ, которым чрезмерное уменьшение SOC подавляется посредством первого примерного режима работы. Фиг. 4 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством увеличения величины генерирования мощности MG1 в соответствии с первым примерным режимом работы. Фиг. 5 является первым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии с первым примерным режимом работы. Фиг. 6 является вторым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии с первым примерным режимом работы.
[0078] Как показано на Фиг. 4, SOC определяется как удовлетворяющее предварительно определенному условию снижения во время t41. Другими словами, SOC определяется как не удовлетворяющее предварительно определенному условию снижения за период A1, длящийся до времени t41. Следовательно, за период A1, длящийся до времени t41, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, но второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Соответственно, как показано на Фиг. 4, величина генерирования мощности MG1 для периода ускорения увеличивается с нуля, в то время как величина генерирования мощности MG2 для периода движения накатом остается равной нулю. Как результат, SOC постепенно снижается.
[0079] После определения того, что SOC удовлетворяет предварительно определенному условию снижения во время t41, определяется то, что можно увеличивать величину генерирования мощности MG1, и то, что увеличенная величина генерирования мощности MG1 не превышает предельное значение Win. В этом случае, за период A2, начинающийся со времени t41, третий модуль 103 управления увеличивает выходную мощность двигателя для периода ускорения и управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения. Соответственно, величина генерирования мощности MG1 для периода ускорения увеличивается в ответ на увеличение выходной мощности двигателя для периода ускорения. Следует отметить, что Фиг. 4 показывает пример, в котором величина генерирования мощности MG1 для периода ускорения максимизируется до значения, совпадающего с предельным значением Win. С другой стороны, второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Следовательно, хотя SOC снижается с почти неварьирующейся скоростью в течение периода движения накатом, SOC увеличивается с увеличенной скоростью в течение периода ускорения. Как результат, уменьшение SOC подавляется. Фиг. 4 показывает пример, в котором достигается равновесие между скоростью, с которой SOC увеличивается в течение периода ускорения, и скоростью, с которой SOC снижается в течение периода движения накатом в результате увеличения величины генерирования мощности MG1.
[0080] Между тем, во время t42, потребление мощности вспомогательного оборудования увеличивается. Следовательно, за период A3, начинающийся со времени t42, скорость, с которой SOC увеличивается в течение периода ускорения, уменьшается, а скорость, с которой SOC снижается в течение периода движения накатом, увеличивается по сравнению с периодом A2. Как результат, SOC постепенно снижается.
[0081] Во время t51 на Фиг. 5, который иллюстрирует первый пример временной диаграммы, приведенной хронологически после временной диаграммы по Фиг. 4, SOC определяется как удовлетворяющее предварительно определенному условию снижения. Тем не менее, величина генерирования мощности MG1 уже совпадает с предельным значением Win во время t51, и, следовательно, когда величина генерирования мощности MG1 увеличивается до точки, в которой SOC больше не удовлетворяет предварительно определенному условию снижения, увеличенная величина генерирования мощности MG1 превышает предельное значение Win. Следовательно, за период A4, начинающийся со времени t51, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, и второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Соответственно, величина генерирования мощности MG1 для периода ускорения увеличивается с нуля, и помимо этого, величина генерирования мощности MG2 для периода движения накатом аналогично увеличивается с нуля. Следовательно, скорость, с которой SOC снижается в течение периода движения накатом, уменьшается, или другими словами, SOC продолжает увеличиваться даже в течение периода движения накатом. Как результат, SOC постепенно увеличивается.
[0082] Следует отметить, что когда электромотор-генератор MG2 осуществляет рекуперацию мощности в течение периода движения накатом, как показано на Фиг. 5, продолжительность периода движения накатом снижается по сравнению со случаем, в котором электромотор-генератор MG2 не осуществляет рекуперацию мощности в течение периода движения накатом.
[0083] Затем, во время t52, SOC определяется как равное или превышающее третье пороговое значение, которое указывается посредством штрихпунктирной линии. Следовательно, во время t52, второй модуль 102 управления управляет электромотором-генератором MG2 таким образом, чтобы прекращать рекуперацию мощности в течение периода движения накатом. Соответственно, за период А5, начинающийся со времени t52, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, но второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Дополнительно, во время t52, третий модуль 103 управления может уменьшать выходную мощность двигателя и величину генерирования мощности MG1, которые увеличены в течение периода ускорения (или, другими словами, возвращать выходную мощность двигателя и величину генерирования мощности MG1 к исходным значениям).
[0084] Альтернативно, как показано на Фиг. 6, который иллюстрирует второй пример временной диаграммы, приведенной хронологически после временной диаграммы по Фиг. 4, предельное значение Win может увеличиваться за период A4, в котором электромотор-генератор MG2 осуществляет рекуперацию мощности в течение периода движения накатом. Например, предельное значение Win может увеличиваться, когда температура аккумулятора 500 снижается. Фиг. 6 показывает пример, в котором предельное значение Win увеличивается во время t61 до того, как SOC определяется как равное или превышающее третье пороговое значение, указываемое посредством штрихпунктирной линии. Как результат, может быть снова определено то, что можно увеличивать величину генерирования мощности MG1 для периода ускорения в диапазоне, не превышающем предельное значение Win. Когда снова определяется то, что можно увеличивать величину генерирования мощности MG1 в диапазоне, не превышающем предельное значение Win, третий модуль 103 управления может увеличивать величину генерирования мощности MG1 для периода ускорения дополнительно посредством дополнительного увеличения выходной мощности двигателя для периода ускорения. Соответственно, скорость, с которой SOC увеличивается в течение периода ускорения, дополнительно увеличивается, и как результат, уменьшение SOC подавляется. Кроме того, как только уменьшение SOC подавлено посредством дополнительного увеличения величины генерирования мощности MG1, второй модуль 102 управления управляет электромотором-генератором MG2 таким образом, чтобы прекращать рекуперацию мощности в течение периода движения накатом. Следовательно, в течение периода А6, начинающегося со времени t61, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, но второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом.
[0085] Затем, во время t62, SOC определяется как равное или превышающее третье пороговое значение, указываемое посредством штрихпунктирной линии. В этом случае, третий модуль 103 управления может уменьшать выходную мощность двигателя и величину генерирования мощности MG1, которые увеличены в течение периода ускорения (или, другими словами, возвращать выходную мощность двигателя и величину генерирования мощности MG1 к исходным значениям) за период А7, начинающийся со времени t62.
[0086] Как описано выше, посредством реализации первого примерного режима работы на гибридном транспортном средстве 10 согласно этому варианту осуществления, аккумулятор 500 может быть заряжен под управлением ECU 100 (более конкретно, первого-третьего модулей 101-103 управления) как в течение периода ускорения, так и в течение периода движения накатом. Соответственно, уменьшение SOC аккумулятора 500 по мере того, как гибридное транспортное средство 10 многократно чередуется между движением с ускорением и движением накатом, предпочтительно подавляется (или предотвращается). Следовательно, чрезмерное уменьшение SOC также предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива гибридного транспортного средства 10 вследствие чрезмерного уменьшения SOC предпочтительно подавляется.
[0087] Поскольку чрезмерное уменьшение SOC подавляется, вероятность того, что движение накатом и с ускорением должно завершаться в гибридном транспортном средстве 10 в состоянии, в котором SOC снижено чрезмерно, например, является почти или абсолютно несуществующей. Другими словами, значение SOC является относительно большим в точке, в которой движение накатом и с ускорением завершается в гибридном транспортном средстве 10. Следовательно, после того, как движение накатом и с ускорением завершается, гибридное транспортное средство 10 может двигаться с использованием выходной мощности электромотора для электромотора-генератора MG2 с двигателем ENG, переведенным в нерабочий режим. Другими словами, гибридное транспортное средство 10 может двигаться в качестве так называемого EV. Как результат, ухудшение эффективности использования топлива вследствие неспособности выполнять EV-движение предпочтительно подавляется.
[0088] Кроме того, поскольку чрезмерное уменьшение SOC подавляется, вероятность того, что движение накатом и с ускорением должно завершаться в гибридном транспортном средстве 10 в состоянии, в котором SOC снижено чрезмерно, например, является почти или абсолютно несуществующей. Другими словами, значение SOC является относительно большим в точке, в которой движение накатом и с ускорением завершается в гибридном транспортном средстве 10. Следовательно, после того, как движение накатом и с ускорением завершается в гибридном транспортном средстве 10, двигатель ENG не должен устанавливаться в рабочий режим просто для того, чтобы увеличивать SOC. Как результат, ухудшение эффективности использования топлива, вызываемое посредством установки двигателя ENG в рабочий режим просто для того, чтобы увеличивать SOC, предпочтительно подавляется.
[0089] Дополнительно, гибридное транспортное средство 10 переключает двигатель ENG с нерабочего режима на рабочий режим посредством ENG проворачивания двигателя с использованием электромотора-генератора MG1, например, чтобы выполнять движение с ускорением после движения накатом. В состоянии, в котором SOC снижено чрезмерно, может быть затруднительным проворачивать двигатель внутреннего сгорания с использованием электромотора-генератора MG1. Тем не менее, поскольку чрезмерное уменьшение SOC подавляется способом, описанным выше, вероятность того, что затруднительно проворачивать двигатель ENG с использованием электромотора-генератора MG1, является почти или абсолютно не существующей. Гибридное транспортное средство 10, следовательно, может выполнять движение накатом и с ускорением непрерывно. Другими словами, гибридное транспортное средство 10 может продолжать движение накатом и с ускорением в течение относительно длительного периода. Как результат, ухудшение эффективности использования топлива вследствие трудности при продолжении движения накатом и с ускорением предпочтительно подавляется.
[0090] Помимо этого, гибридное транспортное средство 10 выполняет рекуперацию мощности с использованием электромотора-генератора MG2 в течение периода движения накатом избирательно под управлением второго модуля 102 управления, когда SOC удовлетворяет предварительно определенному условию снижения (например, возникает когда уменьшение SOC, которое может вызывать ухудшение эффективности использования топлива). Другими словами, когда SOC не удовлетворяет предварительно определенному условию снижения, гибридное транспортное средство 10 не должно выполнять рекуперацию мощности с использованием электромотора-генератора MG2 в течение периода движения накатом. Следовательно, при использовании гибридного транспортного средства 10, рекуперация мощности с использованием электромотора-генератора MG2 в течение периода движения накатом может не допускаться в максимально возможной степени. Как результат, чрезмерное уменьшение продолжительности периода движения накатом, которое может возникать в результате рекуперации мощности посредством электромотора-генератора MG2 в течение периода движения накатом, подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива гибридного транспортного средства 10 вследствие чрезмерного уменьшения SOC.
[0091] Кроме того, гибридное транспортное средство 10 выполняет рекуперацию мощности с использованием электромотора-генератора MG2 в течение периода движения накатом избирательно под управлением второго модуля 102 управления, когда можно увеличивать величину генерирования мощности MG1 в течение периода ускорения. Другими словами, когда можно увеличивать величину генерирования мощности MG1 в течение периода ускорения, гибридное транспортное средство 10 не должно обязательно выполнять рекуперацию мощности с использованием электромотора-генератора MG2 в течение периода движения накатом. Следовательно, при использовании гибридного транспортного средства 10, рекуперация мощности с использованием электромотора-генератора MG2 в течение периода движения накатом может не допускаться в максимально возможной степени. Как результат, чрезмерное уменьшение продолжительности периода движения накатом, которое может возникать в результате рекуперации мощности посредством электромотора-генератора MG2 в течение периода движения накатом, подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива гибридного транспортного средства 10 вследствие чрезмерного уменьшения SOC.
[0092] Кроме того, гибридное транспортное средство 10 выполняет рекуперацию мощности с использованием электромотора-генератора MG2 в течение периода движения накатом избирательно под управлением второго модуля 102 управления, когда величина генерирования мощности MG1 превышает предельное значение Win после увеличения. Другими словами, при условии, что величина генерирования мощности MG1 не превышает предельное значение Win после увеличения, гибридное транспортное средство 10 не должно обязательно выполнять рекуперацию мощности с использованием электромотора-генератора MG2 в течение периода движения накатом. Следовательно, при использовании гибридного транспортного средства 10, рекуперация мощности с использованием электромотора-генератора MG2 в течение периода движения накатом может не допускаться в максимально возможной степени. Как результат, чрезмерное уменьшение продолжительности периода движения накатом, которое может возникать в результате рекуперации мощности посредством электромотора-генератора MG2 в течение периода движения накатом, подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива гибридного транспортного средства 10 вследствие чрезмерного уменьшения SOC.
[0093] Далее, ссылаясь на Фиг. 7, описывается второй примерный режим работы гибридного транспортного средства 10 (более конкретно, второй примерный режим работы гибридного транспортного средства 10 в ходе движения накатом и с ускорением). Фиг. 7 является блок-схемой последовательности операций способа, показывающей последовательность операций второго примерного режима работы гибридного транспортного средства 10 (более конкретно, второго примерного режима работы гибридного транспортного средства 10 в ходе движения накатом и с ускорением). Следует отметить, что в нижеприведенном описании, идентичным операциям с первым примерным режимом работы назначены идентичные номера этапов, и их подробное описание опущено.
[0094] Как показано на Фиг. 7, второй примерный режим работы отличается от первого примерного режима работы в том, что когда определяется то, что возможно увеличивать величину генерирования мощности MG1 в течение периода ускорения (этап S105: "Да") в первом примерном режиме работы, выполняется определение в отношении того, превышает или нет увеличенная величина генерирования мощности MG1 предельное значение Win, тогда как когда определяется то, что возможно увеличивать величину генерирования мощности MG1 в течение периода ускорения (этап S105: "Да") во втором примерном режиме работы, выполняется определение в отношении того, ухудшается (уменьшается) или нет эффективность силовой передачи, по меньшей мере, на предварительно определенную величину (этап S206). Все остальные операции второго примерного режима работы могут быть идентичными остальным операциям первого примерного режима работы.
[0095] Более конкретно, когда, во втором примерном режиме работы, в качестве результата определения этапа S105 определяется то, что возможно увеличивать величину генерирования мощности MG1 в течение периода ускорения (этап S105: "Да"), первый модуль 101 управления дополнительно определяет то, ухудшается или нет эффективность силовой передачи гибридного транспортного средства 10, по меньшей мере, на четвертое пороговое значение после того, как выходная мощность двигателя увеличивается, чтобы увеличивать величину генерирования мощности MG1 в течение периода ускорения по сравнению с эффективностью силовой передачи до того, как увеличивается выходная мощность двигателя (этап S206). Следует отметить, что здесь "эффективность силовой передачи" обозначает общую эффективность работы системы трансмиссии, используемой для того, чтобы передавать мощность из двигателя ENG и электромоторов/генераторов MG1 и MG2 на колеса 12 транспортного средства.
[0096] Когда в качестве результата определения этапа S206 определяется то, что эффективность силовой передачи не ухудшается, по меньшей мере, на четвертое пороговое значение (этап S206: "Нет"), выполняется операция, аналогичная операции, выполняемой в первом примерном режиме работы после определения того, что увеличенная величина генерирования мощности MG1 не превышает предельное значение Win. Более конкретно, второй модуль 102 управления не должен обязательно управлять электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. В этом случае, третий модуль 103 управления управляет двигателем ENG таким образом, чтобы увеличивать выходную мощность двигателя для периода ускорения (или варьировать рабочую точку двигателя ENG) (этап S108). Как результат, величина генерирования мощности MG1 для периода ускорения увеличивается. Дополнительно, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность с использованием части выходной мощности двигателя (т.е. увеличенной выходной мощности двигателя) в течение периода ускорения (этап S109).
[0097] С другой стороны, когда в качестве результата определения этапа S206 определяется то, что эффективность силовой передачи ухудшается, по меньшей мере, на четвертое пороговое значение (этап S206: "Да"), выполняется операция, аналогичная операции, выполняемой в первом примерном режиме работы после определения того, что увеличенная величина генерирования мощности MG1 превышает предельное значение Win. Более конкретно, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, и помимо этого, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом (этап S107).
[0098] Здесь, ссылаясь на Фиг. 8-10, описывается способ, которым чрезмерное уменьшение SOC подавляется посредством второго примерного режима работы. Фиг. 8 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством увеличения величины генерирования мощности MG1 в соответствии со вторым примерным режимом работы. Фиг. 9 является первым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, эффективность силовой передачи, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемая посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии со вторым примерным режимом работы. Фиг. 10 является вторым примером временной диаграммы, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством рекуперации мощности с использованием электромотора-генератора MG2 в течение периода движения накатом в соответствии со вторым примерным режимом работы.
[0099] Как показано на Фиг. 8, SOC определяется как удовлетворяющее предварительно определенному условию снижения во время t81. Другими словами, SOC определяется как не удовлетворяющее предварительно определенному условию снижения за период B1, длящийся до времени t81. Следовательно, за период, длящийся до времени t81, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, но второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Соответственно, величина генерирования мощности MG1 для периода ускорения увеличивается с нуля, в то время как величина генерирования мощности MG2 для периода движения накатом остается равной нулю. Как результат, SOC постепенно снижается.
[0100] После определения того, что SOC удовлетворяет предварительно определенному условию снижения во время t81, дополнительно определяется то, что можно увеличивать величину генерирования мощности MG1, и то, что эффективность силовой передачи не ухудшается, по меньшей мере, на четвертое пороговое значение. В этом случае, за период B2, начинающийся со времени t81, третий модуль 103 управления увеличивает выходную мощность двигателя для периода ускорения и управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения. Соответственно, величина генерирования мощности MG1 для периода ускорения увеличивается в ответ на увеличение выходной мощности двигателя для периода ускорения. Следует отметить, что Фиг. 8 показывает пример, в котором величина генерирования мощности MG1 для периода ускорения максимизируется до значения, совпадающего с предельным значением Win. С другой стороны, второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Следовательно, хотя SOC снижается с почти неварьирующейся скоростью в течение периода движения накатом, SOC увеличивается с увеличенной скоростью в течение периода ускорения. Как результат, уменьшение SOC подавляется. Фиг. 8 показывает пример, в котором достигается равновесие между скоростью, с которой SOC увеличивается в течение периода ускорения, и скоростью, с которой SOC снижается в течение периода движения накатом в результате увеличения величины генерирования мощности MG1.
[0101] Между тем, во время t82, потребление мощности вспомогательного оборудования увеличивается. Следовательно, за период B3, начинающийся со времени t82, скорость, с которой SOC увеличивается в течение периода ускорения, уменьшается, а скорость, с которой SOC снижается в течение периода движения накатом, увеличивается по сравнению с периодом B2. Как результат, SOC постепенно снижается.
[0102] Во время t91 на Фиг. 9, который иллюстрирует первый пример временной диаграммы, приведенной хронологически после временной диаграммы по Фиг. 8, SOC определяется как удовлетворяющее предварительно определенному условию снижения. Здесь, определяется то, что после того, как выходная мощность двигателя увеличивается дополнительно во время t91, чтобы дополнительно увеличивать величину генерирования мощности MG1, эффективность силовой передачи ухудшается, по меньшей мере, на четвертое пороговое значение в точке после времени t91 по сравнению с эффективностью силовой передачи до времени t81, в которое выходная мощность двигателя увеличивается. Следует отметить, что на Фиг. 9, увеличенная выходная мощность двигателя и ухудшенная эффективность силовой передачи обозначаются посредством толстых пунктирных линий. Следовательно, за период B4, начинающийся со времени t91, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения без дополнительного увеличения выходной мощности двигателя в течение периода ускорения, как показано посредством сплошной жирной линии на Фиг. 9, и второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Соответственно, величина генерирования мощности MG1 для периода ускорения увеличивается с нуля, и помимо этого, величина генерирования мощности MG2 для периода движения накатом аналогично увеличивается с нуля. Следовательно, скорость, с которой SOC снижается в течение периода движения накатом, уменьшается, или другими словами, SOC продолжает увеличиваться даже в течение периода движения накатом. Как результат, SOC постепенно увеличивается. Кроме того, поскольку выходная мощность двигателя не увеличена дополнительно в течение периода ускорения, эффективность силовой передачи не ухудшается (более конкретно, не ухудшается, по меньшей мере, на четвертое пороговое значение) в течение периода ускорения, как показано посредством сплошной жирной линии на Фиг. 9.
[0103] Затем, во время t92, SOC определяется как равное или превышающее третье пороговое значение, которое указывается посредством штрихпунктирной линии. Следовательно, во время t92, второй модуль 102 управления управляет электромотором-генератором MG2 таким образом, чтобы прекращать рекуперацию мощности в течение периода движения накатом. Соответственно, за период B5, начинающийся со времени t92, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, но второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом. Дополнительно, во время t92, третий модуль 103 управления может уменьшать выходную мощность двигателя и величину генерирования мощности MG1, которые увеличены в течение периода ускорения (или, другими словами, возвращать выходную мощность двигателя и величину генерирования мощности MG1 к исходным значениям).
[0104] Альтернативно, как показано на Фиг. 10, который иллюстрирует второй пример временной диаграммы, приведенной хронологически после временной диаграммы по Фиг. 8, снова может быть определено то, что по какой-либо причине, эффективность силовой передачи не ухудшается, по меньшей мере, на четвертое пороговое значение в периоде B4, в котором электромотор-генератор MG2 осуществляет рекуперацию мощности в течение периода движения накатом, даже после того, как выходная мощность двигателя дополнительно увеличивается, чтобы дополнительно увеличивать величину генерирования мощности MG1. Фиг. 10 показывает пример, в котором снова определяется то, во время t101 до того, как SOC определяется как равное или превышающее третье пороговое значение, указываемое посредством штрихпунктирной линии, что эффективность силовой передачи не ухудшается, по меньшей мере, на четвертое пороговое значение даже после того, как выходная мощность двигателя дополнительно увеличивается, чтобы дополнительно увеличивать величину генерирования мощности MG1. Когда снова определяется то, что эффективность силовой передачи не ухудшается, по меньшей мере, на четвертое пороговое значение, третий модуль 103 управления дополнительно может увеличивать величину генерирования мощности MG1 для периода ускорения посредством дополнительного увеличения выходной мощности двигателя для периода ускорения. Соответственно, скорость, с которой SOC увеличивается в течение периода ускорения, дополнительно увеличивается, и как результат, уменьшение SOC подавляется. Кроме того, как только уменьшение SOC подавлено посредством дополнительного увеличения величины генерирования мощности MG1, второй модуль 102 управления управляет электромотором-генератором MG2 таким образом, чтобы прекращать рекуперацию мощности в течение периода движения накатом. Следовательно, за период B6, начинающийся со времени t101, третий модуль 103 управления управляет электромотором-генератором MG1 таким образом, чтобы генерировать мощность в течение периода ускорения, но второй модуль 102 управления не управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом.
[0105] Затем, во время t102, SOC определяется как равное или превышающее третье пороговое значение, указываемое посредством штрихпунктирной линии. В этом случае, третий модуль 103 управления может уменьшать выходную мощность двигателя и величину генерирования мощности MG1, которые увеличены в течение периода ускорения (или, другими словами, возвращать выходную мощность двигателя и величину генерирования мощности MG1 к исходным значениям) за период B7, начинающийся со времени t102.
[0106] Как описано выше, посредством реализации второго примерного режима работы на гибридном транспортном средстве 10 согласно этому варианту осуществления, различные преимущества, полученные посредством реализации первого примерного режима работы, предпочтительно могут получаться в равной степени. Помимо этого, во втором примерном режиме работы, ухудшение (более конкретно, чрезмерное ухудшение) эффективности силовой передачи предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива гибридного транспортного средства 10 вследствие ухудшения эффективности силовой передачи предпочтительно подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива гибридного транспортного средства 10 вследствие чрезмерного уменьшения SOC.
[0107] Следует отметить, что в дополнение или вместо определения того, ухудшается или нет эффективность силовой передачи, по меньшей мере, на четвертое пороговое значение, первый модуль 101 управления может определять то, ухудшается или нет эффективность работы двигателя ENG, по меньшей мере, на пятое пороговое значение после того, как выходная мощность двигателя увеличивается, так что величина генерирования мощности MG1 в течение периода ускорения увеличивается по сравнению с эффективностью работы до увеличения выходной мощности двигателя. Когда определяется то, что эффективность двигателя ENG не ухудшается, по меньшей мере, на пятое пороговое значение, может выполняться операция, аналогичная операции, выполняемой в первом примерном режиме работы после определения того, что увеличенная величина генерирования мощности MG1 не превышает предельное значение Win. Когда определяется то, что эффективность двигателя ENG ухудшается, по меньшей мере, на пятое пороговое значение, может выполняться операция, аналогичная операции, выполняемой в первом примерном режиме работы после определения того, что увеличенная величина генерирования мощности MG1 превышает предельное значение Win.
[0108] Следует отметить, что в вышеприведенном описании, двигатель ENG находится в нерабочем режиме в течение периода движения накатом. Тем не менее, двигатель ENG может оставаться в рабочем режиме даже в течение периода движения накатом. Аналогично в этом случае, при условии, что гибридное транспортное средство 10 движется накатом без использования выходной мощности двигателя от двигателя ENG, гибридное транспортное средство 10 выполняет движение накатом.
[0109] Здесь, ссылаясь на Фиг. 11, описывается способ, которым чрезмерное уменьшение SOC подавляется в случае, если двигатель ENG остается в рабочем режиме в течение периода движения накатом. Фиг. 11 является временной диаграммой, показывающей запрашиваемую пользователем мощность, скорость транспортного средства, выходную мощность двигателя, выходную мощность электромотора, служащую в качестве выходной мощности электромотора-генератора MG2, величину генерирования мощности MG1, служащую в качестве величины мощности, генерируемой посредством электромотора-генератора MG1, величину генерирования мощности MG2, служащую в качестве величины мощности, генерируемой посредством (т.е. величины мощности, рекуперируемой посредством) электромотора-генератора MG2, и SOC аккумулятора 500 в случае, если чрезмерное уменьшение SOC подавляется посредством увеличения величины генерирования мощности MG1 в соответствии с первым примерным режимом работы в ситуации, в которой двигатель ENG остается в рабочем режиме в течение периода движения накатом.
[0110] Временная диаграмма показана на Фиг. 11 отличается от временной диаграммы, показанной на Фиг. 4, тем, что выходная мощность двигателя не падает полностью до нуля в течение периода движения накатом. Следует отметить, что Фиг. 11 показывает пример, в котором выходная мощность двигателя для периода движения накатом соответствует выходной мощности двигателя в случае, если двигатель ENG выполняет так называемую работу на холостом ходу. Все остальные признаки временной диаграммы, показанной на Фиг. 11, могут быть идентичными другим признакам временной диаграммы, показанной на Фиг. 4. Чертежи, показанные на Фиг. 5-6 и Фиг. 8-10, аналогично являются идентичными. Следовательно, даже когда двигатель ENG остается в рабочем режиме в течение периода движения накатом, ухудшение эффективности использования топлива гибридного транспортного средства 10 вследствие чрезмерного уменьшения SOC предпочтительно подавляется в равной степени.
[0111] В вышеприведенном описании, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом (см. этап S107 на Фиг. 2). Тем не менее, когда двигатель ENG остается в рабочем режиме в течение периода движения накатом, второй модуль 102 управления может управлять электромотором-генератором MG1 таким образом, чтобы генерировать мощность с использованием, по меньшей мере, части выходной мощности двигателя в течение периода движения накатом, помимо или вместо управления электромотором/генератором MG2 для рекуперации мощности в течение периода движения накатом.
[0112] В вышеприведенном описании, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение всего периода инерции. Тем не менее, второй модуль 102 управления может управлять электромотором-генератором MG2 таким образом, что происходит рекуперация мощности в течение части периода движения накатом и не происходит рекуперации в течение оставшейся части периода движения накатом.
[0113] В вышеприведенном описании, второй модуль 102 управления управляет электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом, когда SOC удовлетворяет предварительно определенному условию снижения. Тем не менее, второй модуль 102 управления может управлять электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом, когда требуемый параметр кроме SOC удовлетворяет предварительно определенному условию. Например, второй модуль 102 управления может управлять электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом, когда скорость транспортного средства в течение периода движения накатом варьируется в предварительно определенном шаблоне варьирования. Более конкретно, например, второй модуль 102 управления может управлять электромотором-генератором MG2 для рекуперации мощности в течение периода движения накатом, когда скорость транспортного средства постепенно увеличивается в течение периода движения накатом. Когда скорость транспортного средства постепенно увеличивается в течение периода движения накатом, добавочная кинетическая энергия предположительно должна вырабатываться посредством гибридного транспортного средства 10. Следовательно, когда рекуперация мощности выполняется в течение периода движения накатом в то время, когда скорость транспортного средства постепенно увеличивается, электромотор-генератор MG2 осуществляет рекуперацию мощности с использованием добавочной кинетической энергии. Как результат, ухудшение эффективности использования топлива вследствие уменьшения продолжительности периода движения накатом, получающегося в результате рекуперации мощности в течение периода движения накатом, еще более предпочтительно подавляется.
[0114] Увеличение скорости транспортного средства в течение периода движения накатом возникает, когда гибридное транспортное средство 10 движется на дороге, имеющей наклонный градиент (другими словами, спускается по склону). Тем не менее, следует отметить, что в то время, когда гибридное транспортное средство 10 движется на дороге, имеющей наклонный градиент, первый модуль 101 управления не должен обязательно управлять гибридным транспортным средством 10 таким образом, чтобы выполнять движение накатом и с ускорением. Например, первый модуль 101 управления может управлять гибридным транспортным средством 10 таким образом, чтобы выполнять непрерывное движение накатом. Дополнительно, второй модуль 102 управления может управлять электромотором-генератором MG2 для рекуперации мощности, по меньшей мере, в части периода движения накатом. В этом случае, двигатель ENG может устанавливаться в нерабочий режим.
[0115] Выше описан пример, в котором гибридное транспортное средство 10 использует так называемую гибридную систему с делением (с делением мощности) (например, THS: Toyota Hybrid System). Тем не менее, ECU 100 может управлять гибридным транспортным средством 10 способом, описанным выше, аналогично, когда гибридное транспортное средство 10 использует параллельную гибридную систему или последовательную гибридную систему.
[0116] В вышеприведенном описании, гибридное транспортное средство 10 включает в себя множество электромоторов/генераторов MG1 и MG2. Тем не менее, гибридное транспортное средство 10 может включать в себя один электромотор-генератор. Альтернативно, гибридное транспортное средство 10 может включать в себя, вместо или в дополнение к одному или более электромоторов/генераторов, другой требуемый генератор мощности (например, генератор переменного тока, генератор и т.п.), который выполнен с возможностью генерирования мощности с использованием, по меньшей мере, одной из: выходной мощности двигателя от двигателя ENG и кинетической энергии гибридного транспортного средства 10. Аналогично в этих случаях, ECU 100 может управлять гибридным транспортным средством 10 способом, описанным выше.
[0117] Следует отметить, что варианты осуществления изобретения могут модифицироваться надлежащим образом в пределах объема, который не отступает от сущности или принципа изобретения, интерпретируемого из формулы изобретения и всего подробного описания, и устройство управления транспортным средством, полученное в качестве результата этих модификаций, также включается в объем изобретения.
[0118] Изобретение может обобщаться следующим образом.
[0119] Первое аспект изобретения относится к устройству управления транспортным средством, которое управляет транспортным средством, включающим в себя двигатель внутреннего сгорания, модуль генерирования мощности, который преобразует, по меньшей мере, одну из: выходной мощности двигателя от двигателя внутреннего сгорания и кинетической энергии транспортного средства в электрическую мощность, и модуль накопления мощности, который накапливает электрическую мощность, преобразованную посредством модуля генерирования мощности. Устройство управления транспортным средством включает в себя: первый модуль управления, выполненный с возможностью управлять транспортным средством таким образом, чтобы многократно чередоваться между движением с ускорением, при котором транспортное средство ускоряется с использованием выходной мощности двигателя, и движением накатом, при котором транспортное средство движется накатом без использования выходной мощности двигателя, так что скорость транспортного средства поддерживается в предварительно определенной области скоростей; и второй модуль управления, выполненный с возможностью управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, в котором транспортное средство выполняет движение накатом.
[0120] С помощью устройства управления транспортным средством, может управляться транспортное средство, включающее в себя двигатель внутреннего сгорания, модуль генерирования мощности и модуль накопления мощности. Модуль генерирования мощности преобразует выходную мощность двигателя от двигателя внутреннего сгорания в электрическую мощность. Модуль генерирования мощности преобразует кинетическую энергию транспортного средства в электрическую мощность в дополнение или вместо выходной мощности двигателя от двигателя внутреннего сгорания. Электромотор-генератор, генератор переменного тока и т.п., например, может использоваться в качестве модуля генерирования мощности. Электрическая мощность, преобразованная (т.е. генерируемая) посредством модуля генерирования мощности, накапливается в модуле накопления мощности.
[0121] Чтобы управлять транспортным средством таким образом, устройство управления транспортным средством включает в себя первый модуль управления и второй модуль управления.
[0122] Первый модуль управления управляет транспортным средством таким образом, чтобы многократно чередоваться между движением с ускорением и движением накатом таким образом, что скорость транспортного средства поддерживается в предварительно определенной области скоростей. Как результат, транспортное средство может двигаться непрерывно практически с постоянной скоростью транспортного средства.
[0123] В ходе движения с ускорением, транспортное средство движется посредством движения за счет мощности (типично ускорения) с использованием выходной мощности двигателя. В ходе движения с ускорением, транспортное средство использует выходную мощность двигателя, и, следовательно, двигатель внутреннего сгорания устанавливается в рабочий режим. С другой стороны, в ходе движения накатом, транспортное средство движется накатом без использования выходной мощности двигателя. В ходе движения накатом, транспортное средство не использует выходную мощность двигателя, и, следовательно, двигатель внутреннего сгорания может устанавливаться в нерабочий режим, чтобы повышать эффективность использования топлива транспортного средства. Тем не менее, следует отметить, что двигатель внутреннего сгорания транспортного средства может устанавливаться в рабочий режим аналогично в ходе движения накатом. Другими словами, можно сказать, что движение накатом проводится в транспортном средстве, даже когда двигатель внутреннего сгорания находится в рабочем режиме при условии, что транспортное средство не выполняет движение за счет мощности с использованием выходной мощности двигателя от двигателя внутреннего сгорания в рабочем режиме.
[0124] Второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя от двигателя внутреннего сгорания и кинетической энергии транспортного средства в электрическую мощность. Более конкретно, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, в котором транспортное средство выполняет движение накатом. Другими словами, второй модуль управления управляет модулем генерирования мощности таким образом, что мощность формируется в течение периода движения накатом. В это время, второй модуль управления может управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение всего периода инерции. Альтернативно, второй модуль управления может управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение части периода движения накатом.
[0125] Когда транспортное средство выполняет движение накатом, и двигатель внутреннего сгорания находится в нерабочем режиме, например, второй модуль управления может управлять модулем генерирования мощности таким образом, чтобы преобразовывать кинетическую энергию (более конкретно, по меньшей мере, часть кинетической энергии) в электрическую мощность в течение периода движения накатом. Когда транспортное средство выполняет движение накатом, и двигатель внутреннего сгорания находится в рабочем режиме, например, второй модуль управления может управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя (более конкретно, по меньшей мере, части выходной мощности двигателя) и кинетической энергии (более конкретно, по меньшей мере, части кинетической энергии) в электрическую мощность в течение периода движения накатом.
[0126] Следовательно, модуль генерирования мощности выполнен с возможностью генерирования мощности в основном под управлением второго модуля управления не только в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, но также и в течение периода движения накатом. Другими словами, модуль накопления мощности заряжается как в течение периода ускорения, так и в течение периода движения накатом. Следовательно, уменьшение величины накопления мощности в модуле накопления мощности (другими словами, величины мощности, накапливаемой в модуле накопления мощности) в то время, когда транспортное средство многократно чередуется между движением с ускорением и движением накатом, предпочтительно подавляется (другими словами, предотвращается). Соответственно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
[0127] Второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина накопления мощности в модуле накопления мощности снижается в то время, когда транспортное средство многократно чередуется между движением с ускорением и движением накатом.
[0128] Согласно этой конфигурации, уменьшение величины накопления мощности в модуле накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, предпочтительно подавляется. Соответственно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
[0129] Следует отметить, что тогда, когда модуль генерирования мощности преобразует, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, скорость, с которой скорость транспортного средства снижается в течение периода движения накатом, больше, чем тогда, когда модуль генерирования мощности не преобразует, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом. Следовательно, когда, по меньшей мере, одна из выходной мощности двигателя и кинетической энергии преобразуется в электрическую мощность в течение периода движения накатом, продолжительность периода движения накатом снижается. Другими словами, когда модуль генерирования мощности преобразует, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, период движения накатом меньше, когда модуль генерирования мощности не преобразует, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом. С другой стороны, эффективность использования топлива транспортного средства постоянно повышается, поскольку увеличивается продолжительность периода движения накатом, в котором двигатель внутреннего сгорания предпочтительно устанавливается в нерабочий режим (или в котором выходная мощность двигателя не используется для движения транспортного средства, даже когда двигатель внутреннего сгорания находится в рабочем режиме, и, следовательно, выходная мощность двигателя относительно снижается). Следовательно, чтобы повышать эффективность использования топлива, можно предотвращать преобразование, по меньшей мере, одной из выходной мощности двигателя и кинетической энергии в электрическую мощность посредством модуля генерирования мощности в течение периода движения накатом. Следовательно, согласно этой конфигурации, чтобы не допускать чрезмерное уменьшение продолжительности периода движения накатом, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом избирательно, когда возникает уменьшение величины накопления мощности, которое может вызывать ухудшение эффективности использования топлива. Другими словами, когда уменьшение величины накопления мощности, которое может вызывать ухудшение эффективности использования топлива, не возникает, второй модуль управления не должен обязательно управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом, которое может возникать, когда, по меньшей мере, одна из выходной мощности двигателя и кинетической энергии преобразуется в электрическую мощность в течение периода движения накатом, подавляется при одновременном предпочтительном подавлении ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности.
[0130] Здесь, "уменьшение величины накопления мощности" указывает явление, в силу которого транспортное средство продолжает движение после того, как возникает "уменьшение величины накопления мощности", так что величина накопления мощности может падать (типично, чрезмерно снижаться или падать ниже предварительно определенного порогового значения). "Уменьшение величины накопления мощности" может возникать таким образом, когда, например, величина, на которую величина накопления мощности увеличивается в течение периода ускорения, в котором выполняется движение с ускорением, меньше величины, на которую величина накопления мощности снижается в течение периода движения накатом. Соответственно, "уменьшение величины накопления мощности" может указывать, например, уменьшение величины накопления мощности между началом периода ускорения, в котором движение с ускорением выполняется, и концом периода движения накатом после периода ускорения. В этом случае, можно сказать, что величина накопления мощности снижена, когда величина накопления мощности в начале периода ускорения, в котором выполняется движение с ускорением, превышает величину накопления мощности в конце периода движения накатом после периода ускорения. С другой стороны, можно сказать, что величина накопления мощности не снижена, когда величина накопления мощности в начале периода ускорения, в котором выполняется движение с ускорением, не превышает величину накопления мощности в конце периода движения накатом после периода ускорения. Другими словами, "уменьшение величины накопления мощности" не должно обязательное указывать временное или мгновенное уменьшение мгновенного значения величины накопления мощности. Иначе говоря, "уменьшение величины накопления мощности" является явлением, которое может возникать, когда мгновенное значение величины накопления мощности временно или мгновенно увеличивается. Следовательно, "уменьшение величины накопления мощности" означает инкрементное уменьшение среднего значения величины накопления мощности.
[0131] Альтернативно, устройство управления транспортным средством, которое управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, как описано выше, выполнен с возможностью дополнительно включать в себя третий модуль управления, который управляет модулем генерирования мощности таким образом, чтобы преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, и второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения.
[0132] Согласно этой конфигурации, модуль генерирования мощности нормально преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, в котором двигатель внутреннего сгорания находится в рабочем режиме, под управлением третьего модуля управления. В этом случае, модуль генерирования мощности может преобразовывать выходную мощность двигателя в электрическую мощность в течение всего периода ускорения. Альтернативно, модуль генерирования мощности может преобразовывать выходную мощность двигателя в электрическую мощность, по меньшей мере, в течение части периода ускорения.
[0133] Тем не менее, в зависимости от величины мощности, генерируемой посредством модуля генерирования мощности в течение периода ускорения, и величины потребления мощности, накапливаемой в модуле накопления мощности, величина накопления мощности может снижаться по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения. Например, величина накопления мощности может снижаться по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, когда величина мощности, генерируемой посредством модуля генерирования мощности в течение периода ускорения, является относительно небольшой, или величина потребления мощности, накапливаемой в модуле накопления мощности, является относительно большой.
[0134] Следовательно, когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом или вместо или в дополнение к преобразованию выходной мощности двигателя в электрическую мощность в течение периода ускорения. Следовательно, уменьшение величины накопления мощности в модуле накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, предпочтительно подавляется. Следовательно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
[0135] Второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности снижается, и (ii) невозможно увеличивать величину мощности, полученной посредством модуля генерирования мощности, посредством преобразования выходной мощности двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, с тем чтобы прекратить снижение величины накопления мощности. В этом случае, устройство управления транспортным средством дополнительно может включать в себя третий модуль управления, описанный выше, чтобы управлять модулем генерирования мощности таким образом, чтобы преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения.
[0136] Величина мощности, генерируемой посредством модуля генерирования мощности, типично может модифицироваться требуемым образом. Например, величина мощности, генерируемой посредством модуля генерирования мощности, может увеличиваться посредством увеличения выходной мощности двигателя. Следовательно, когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, уменьшение величины накопления мощности может подавляться посредством увеличения величины мощности, генерируемой посредством модуля генерирования мощности в течение периода ускорения. Тем не менее, может быть невозможным по какой-либо причине увеличивать величину мощности, генерируемой посредством модуля генерирования мощности в течение периода ускорения, с тем чтобы прекратить снижение величины накопления мощности (т.е. подавлять уменьшение величины накопления мощности).
[0137] Следовательно, согласно этой конфигурации, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом избирательно, когда невозможно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Другими словами, когда можно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, второй модуль управления не должен обязательно управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности.
[0138] Альтернативно, устройство управления транспортным средством, которое управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда невозможно увеличивать величину мощности, полученной посредством задания модулю генерирования мощности преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения, с тем чтобы прекратить снижение величины накопления мощности, как описано выше, имеет такую конфигурацию, в которой второй модуль управления управляет модулем генерирования мощности таким образом, чтобы не преобразовывать выходную мощность двигателя и кинетическую энергию в электрическую мощность в течение периода движения накатом, когда можно увеличивать величину мощности, полученную при задания модулю генерирования мощности преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения, с тем чтобы прекратить снижение величины накопления мощности.
[0139] Согласно этой конфигурации, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы не преобразовывать выходную мощность двигателя и кинетическую энергию в электрическую мощность в течение периода движения накатом, когда можно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. В этом случае, модуль генерирования мощности предпочтительно увеличивает величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Например, когда устройство управления транспортным средством включает в себя третий модуль управления, описанный выше, третий модуль управления предпочтительно управляет модулем генерирования мощности таким образом, чтобы увеличиваться величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности.
[0140] Альтернативно, устройство управления транспортным средством, которое управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, как описано выше, имеет такую конфигурацию, в которой второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности уменьшается, и (ii) величина мощности, полученная посредством задания модулю генерирования мощности преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения, с тем чтобы прекратить снижение величины накопления мощности, превышает верхнее предельное значение величины мощности, которая может вводиться в модуль накопления мощности. В этом случае, устройство управления транспортным средством дополнительно может включать в себя третий модуль управления, описанный выше, чтобы управлять модулем генерирования мощности таким образом, чтобы преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения.
[0141] Когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, уменьшение величины накопления мощности может подавляться посредством увеличения величины мощности, генерируемой посредством модуля генерирования мощности в течение периода ускорения, как описано выше. Тем не менее, когда величина мощности, генерируемой в течение периода ускорения (более конкретно, минимальная требуемая величина генерирования мощности, при которой может подавляться уменьшение величины накопления мощности), превышает верхнее предельное значение (так называемое предельное значение Win) величины мощности, которая может вводиться в модуль накопления мощности, модуль генерирования мощности не может увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы прекратить снижение величины накопления мощности (т.е. подавлять уменьшение величины накопления мощности).
[0142] Следовательно, согласно этой конфигурации, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом избирательно, когда невозможно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности.
[0143] Альтернативно, устройство управления транспортным средством, которое управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина мощности, полученная посредством задания модулю генерирования мощности преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения, превышает верхнее предельное значение величины мощности, которая может вводиться в модуль накопления мощности, как описано выше, имеет такую конфигурацию, в которой второй модуль управления управляет модулем генерирования мощности таким образом, чтобы не преобразовывать выходную мощность двигателя и кинетическую энергию в электрическую мощность в течение периода движения накатом, когда величина мощности, полученная посредством задания модулю генерирования мощности преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения, чтобы прекращать снижение модуля накопления мощности, не превышает верхнее предельное значение.
[0144] Согласно этой конфигурации, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы не преобразовывать выходную мощность двигателя и кинетическую энергию в электрическую мощность в течение периода движения накатом, когда можно увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. В этом случае, модуль генерирования мощности предпочтительно увеличивает величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Например, когда устройство управления транспортным средством включает в себя третий модуль управления, описанный выше, третий модуль управления предпочтительно управляет модулем генерирования мощности таким образом, чтобы увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности.
[0145] Второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности уменьшается, и (ii) эффективность силовой передачи транспортного средства, причем силовая передача включает в себя двигатель внутреннего сгорания, ухудшается, по меньшей мере, на предварительно определенную величину после того, как величина мощности, полученной посредством модуля генерирования мощности посредством преобразования выходной мощности двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, увеличивается, с тем чтобы прекратить снижение величины накопления мощности. В этом случае, устройство управления транспортным средством дополнительно может включать в себя третий модуль управления, описанный выше, чтобы управлять модулем генерирования мощности таким образом, чтобы преобразовывать выходную мощность двигателя в электрическую мощность в течение периода ускорения.
[0146] Когда величина накопления мощности снижается по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, даже в случае если модуль генерирования мощности преобразует выходную мощность двигателя в электрическую мощность в течение периода ускорения, уменьшение величины накопления мощности может подавляться посредством увеличения величины мощности, генерируемой посредством модуля генерирования мощности в течение периода ускорения, как описано выше. Величина генерирования мощности типично увеличивается посредством увеличения выходной мощности двигателя. Тем не менее, увеличение выходной мощности двигателя приводит к варьированию рабочей точки двигателя внутреннего сгорания, и когда рабочая точка двигателя внутреннего сгорания модифицируется, эффективность силовой передачи транспортного средства, причем силовая передача включает в себя двигатель внутреннего сгорания, варьируется (например, ухудшается). Когда эффективность силовой передачи варьируется (например, ухудшается), эффективность использования топлива транспортного средства варьируется (например, ухудшается). Следовательно, когда величина мощности, генерируемой в течение периода ускорения, увеличивается, чтобы подавлять снижение эффективности использования топлива вследствие чрезмерного уменьшения величины накопления мощности, эффективность силовой передачи может ухудшаться, что вызывает еще большее ухудшение эффективности использования топлива.
[0147] Следовательно, согласно этой конфигурации, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом избирательно, когда эффективность силовой передачи ухудшается, по меньшей мере, на предварительно определенную величину после того, как величина мощности, генерируемой в течение периода ускорения, увеличивается, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. В этом случае, модуль генерирования мощности предпочтительно предотвращает ухудшение эффективности силовой передачи в течение периода ускорения за счет неувеличения величины мощности, генерируемой в течение периода ускорения. Например, когда устройство управления транспортным средством включает в себя третий модуль управления, описанный выше, третий модуль управления предпочтительно предотвращает ухудшение эффективности силовой передачи в течение периода ускорения посредством неуправления модулем генерирования мощности таким образом, чтобы увеличивать величину мощности, генерируемой в течение периода ускорения. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности и ухудшения эффективности использования топлива транспортного средства вследствие ухудшения эффективности силовой передачи.
[0148] Альтернативно, устройство управления транспортным средством, которое управляет модулем генерирования мощности таким образом, чтобы преобразовывать, по меньшей мере, одну из выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда эффективность силовой передачи ухудшается, по меньшей мере, на предварительно определенную величину, как описано выше, имеет такую конфигурацию, в которой второй модуль управления управляет модулем генерирования мощности таким образом, чтобы не преобразовывать выходную мощность двигателя и кинетическую энергию в электрическую мощность в течение периода движения накатом, когда эффективность не ухудшается, по меньшей мере, на предварительно определенную величину.
[0149] Согласно этой конфигурации, когда эффективность силовой передачи не ухудшается, по меньшей мере, на предварительно определенную величину даже после того, как увеличивается величина мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом, второй модуль управления управляет модулем генерирования мощности таким образом, чтобы не преобразовывать выходную мощность двигателя и кинетическую энергию в электрическую мощность в течение периода движения накатом. В этом случае, модуль генерирования мощности предпочтительно увеличивает величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Например, когда устройство управления транспортным средством включает в себя третий модуль управления, описанный выше, третий модуль управления предпочтительно управляет модулем генерирования мощности таким образом, чтобы увеличивать величину мощности, генерируемой в течение периода ускорения, с тем чтобы подавлять уменьшение величины накопления мощности по мере того, как транспортное средство многократно чередуется между движением с ускорением и движением накатом. Как результат, чрезмерное уменьшение продолжительности периода движения накатом подавляется при одновременном предпочтительном подавлении ухудшения эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности и ухудшения эффективности использования топлива транспортного средства вследствие ухудшения эффективности силовой передачи.
[0150] В ходе движения с ускорением, двигатель внутреннего сгорания может устанавливаться в рабочий режим, а в ходе движения накатом, двигатель внутреннего сгорания может устанавливаться в нерабочий режим. В этом случае, второй модуль управления может быть выполнен с возможностью управлять модулем генерирования мощности таким образом, чтобы преобразовывать кинетическую энергию в электрическую мощность в течение, по меньшей мере, части периода движения накатом.
[0151] Согласно этой конфигурации, уменьшение величины накопления мощности в модуле накопления мощности предпочтительно подавляется по мере того, как транспортное средство многократно чередуется между движением с ускорением, при котором двигатель внутреннего сгорания находится в рабочем режиме, и движением накатом, при котором двигатель внутреннего сгорания находится в нерабочем режиме. Соответственно, чрезмерное уменьшение величины накопления мощности в модуле накопления мощности аналогично предпочтительно подавляется. Как результат, ухудшение эффективности использования топлива транспортного средства вследствие чрезмерного уменьшения величины накопления мощности в модуле накопления мощности предпочтительно подавляется.
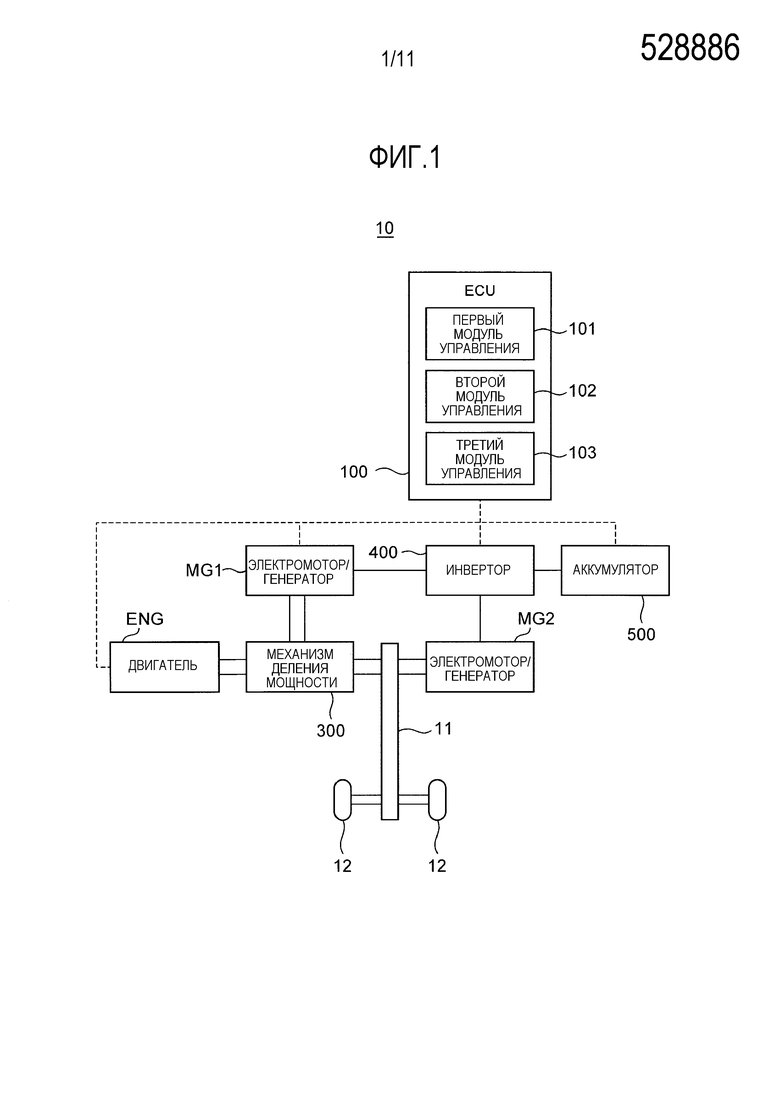

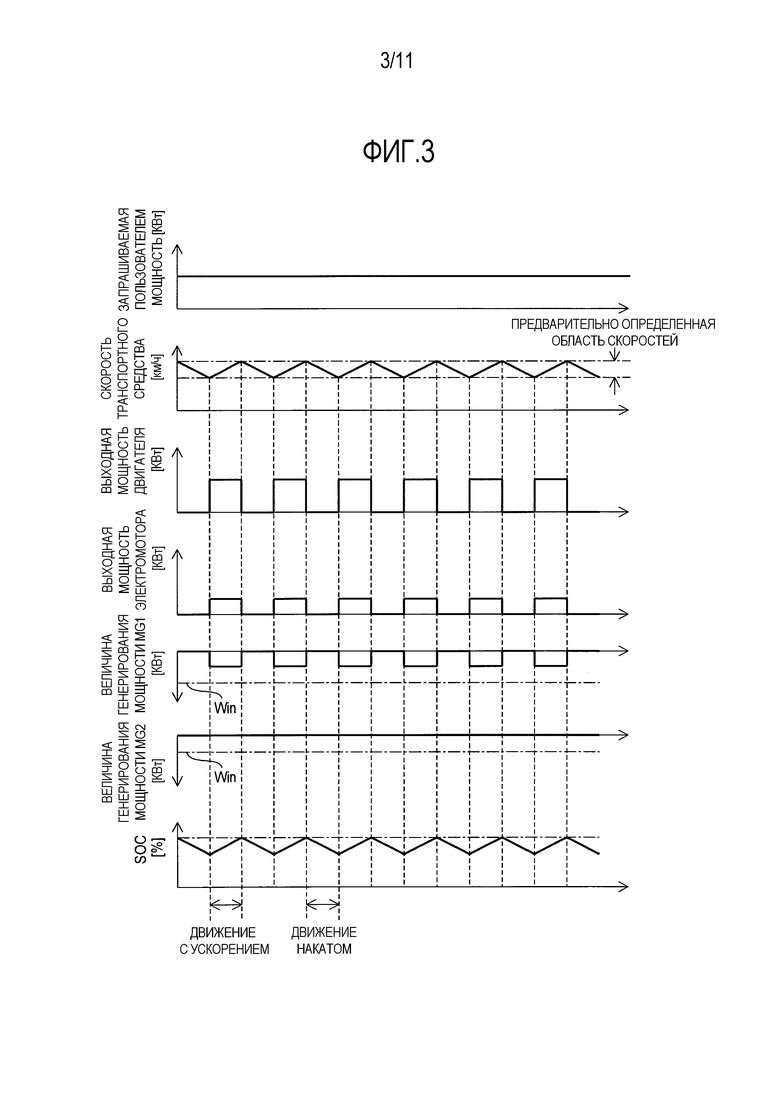


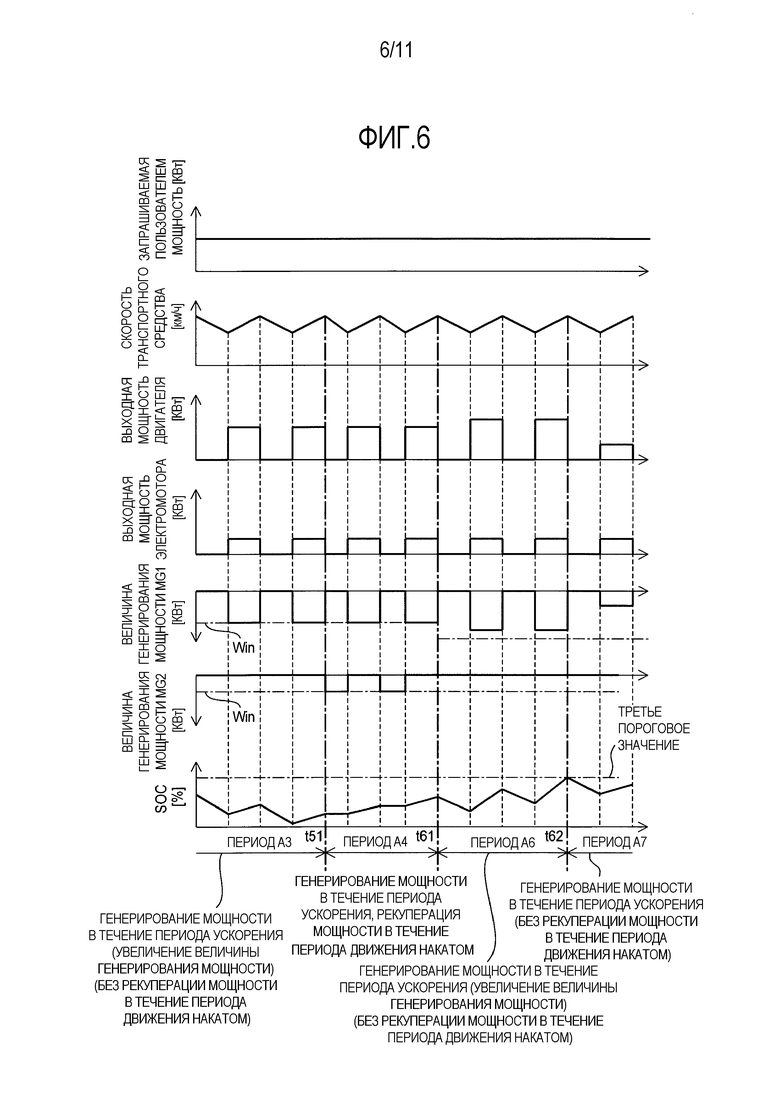


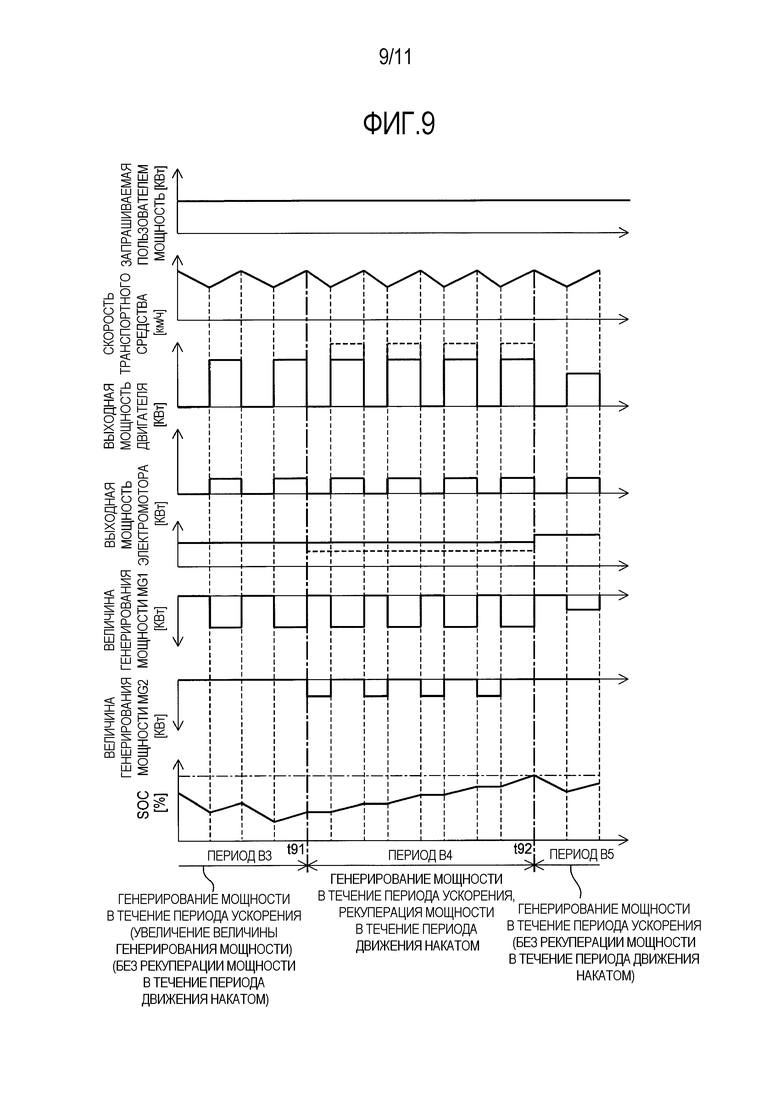
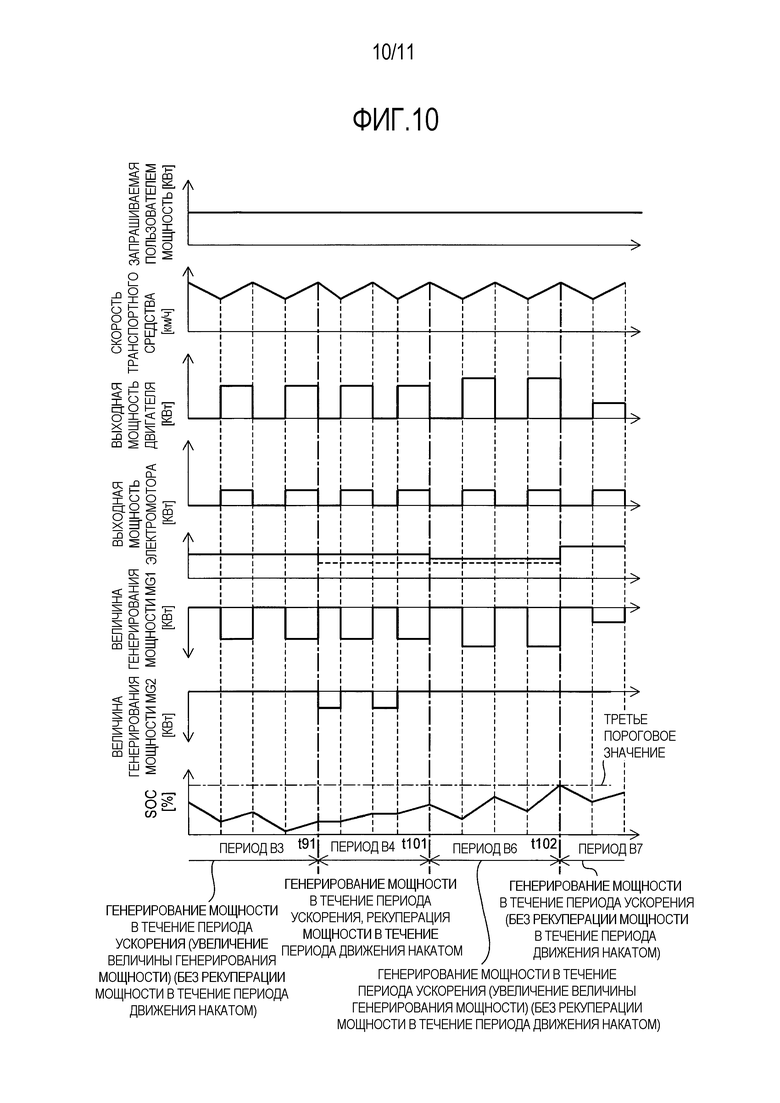

Изобретение относится к транспортным средствам. Устройство управления транспортным средством, включающим в себя двигатель внутреннего сгорания, модуль генерирования мощности и модуль накопления мощности, содержит первый модуль управления для управления транспортным средством для многократного чередования между движением с ускорением с использованием выходной мощности двигателя и движением накатом, так что скорость транспортного средства поддерживается в предварительно определенной области скоростей. Также устройство содержит второй модуль управления для управления модулем генерирования мощности для преобразования выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом. Улучшается эффективность использования топлива. 2 н. и 4 з.п. ф-лы, 11 ил.
1. Устройство управления транспортным средством, которое управляет транспортным средством, включающим в себя двигатель внутреннего сгорания, модуль генерирования мощности, который преобразует по меньшей мере одну из: выходной мощности двигателя от двигателя внутреннего сгорания и кинетической энергии транспортного средства в электрическую мощность, и модуль накопления мощности, который накапливает электрическую мощность, преобразованную посредством модуля генерирования мощности, причем устройство управления транспортным средством содержит:
- первый модуль управления, выполненный с возможностью управлять транспортным средством для многократного чередования между движением с ускорением, при котором транспортное средство ускоряется с использованием выходной мощности двигателя, и движением накатом, при котором транспортное средство движется накатом без использования выходной мощности двигателя, так что скорость транспортного средства поддерживается в предварительно определенной области скоростей; и
- второй модуль управления, выполненный с возможностью управлять модулем генерирования мощности для преобразования по меньшей мере одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, в котором транспортное средство выполняет движение накатом.
2. Устройство управления транспортным средством по п. 1, в котором второй модуль управления выполнен с возможностью управлять модулем генерирования мощности для преобразования по меньшей мере одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда величина накопления мощности в модуле накопления мощности снижается, в то время как транспортное средство многократно чередуется между движением с ускорением и движением накатом.
3. Устройство управления транспортным средством по п. 2, в котором второй модуль управления выполнен с возможностью управлять модулем генерирования мощности для преобразования, по меньшей мере, одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности снижается и (ii) невозможно увеличивать величину мощности, полученной посредством модуля генерирования мощности, посредством преобразования выходной мощности двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, с тем чтобы прекратить снижение величины накопления мощности.
4. Устройство управления транспортным средством по п. 2 или 3, в котором второй модуль управления выполнен с возможностью управлять модулем генерирования мощности для преобразования по меньшей мере одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, когда (i) величина накопления мощности уменьшается и (ii) эффективность силовой передачи транспортного средства, причем силовая передача включает в себя двигатель внутреннего сгорания, ухудшается по меньшей мере на предварительно определенную величину после того, как величина мощности, полученной посредством модуля генерирования мощности посредством преобразования выходной мощности двигателя в электрическую мощность в течение периода ускорения, в котором транспортное средство выполняет движение с ускорением, увеличивается, с тем чтобы прекратить снижение величины накопления мощности.
5. Устройство управления транспортным средством по любому из пп. 1-3, в котором:
- в ходе движения с ускорением двигатель внутреннего сгорания устанавливается в рабочий режим;
- в ходе движения накатом двигатель внутреннего сгорания устанавливается в нерабочий режим; и
- второй модуль управления выполнен с возможностью управлять модулем генерирования мощности для преобразования кинетической энергии в электрическую мощность в течение по меньшей мере части периода движения накатом.
6. Способ управления транспортным средством для управления транспортным средством, включающим в себя двигатель внутреннего сгорания, модуль генерирования мощности, который преобразует по меньшей мере одну из: выходной мощности двигателя от двигателя внутреннего сгорания и кинетической энергии транспортного средства в электрическую мощность, и модуль накопления мощности, который накапливает электрическую мощность, преобразованную посредством модуля генерирования мощности, причем способ управления транспортным средством содержит этапы, на которых:
- управляют транспортным средством для многократного чередования между движением с ускорением, при котором транспортное средство ускоряется с использованием выходной мощности двигателя, и движением накатом, при котором транспортное средство движется накатом без использования выходной мощности двигателя, так что скорость транспортного средства поддерживается в предварительно определенной области скоростей; и
- управляют модулем генерирования мощности для преобразования по меньшей мере одной из: выходной мощности двигателя и кинетической энергии в электрическую мощность в течение периода движения накатом, в котором транспортное средство выполняет движение накатом.
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ВЫДАЧИ МОЩНОСТИ | 2005 |
|
RU2334624C2 |
| ГИБРИДНОЕ ПРИВОДНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2007 |
|
RU2410250C2 |
| СИЛОВАЯ ЧАСТЬ КОНТРОЛЛЕРА ПОДЪЕМНОЙ ИЛИ ТРАНСПОРТНОЙ МАШИНЫ | 2010 |
|
RU2460683C2 |
| Электронный двоичный реверсивный счетчик | 1960 |
|
SU134487A1 |

