Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к способу управления наносным средством, содержащим насос и блок управления, насос, содержащий электродвигатель и блок управления, выполненный с возможностью привода упомянутого электродвигателя. В частности, настоящее изобретение относится к способу для управления наносным средством, причем упомянутый электродвигатель, в каждый отдельный момент времени, когда насос находится в активном состоянии, и электродвигатель приводится в действие в первом направлении, связан с коэффициентом нагрузки, который соответствует мгновенным рабочим условиям наносного средства, наносное средство, кроме того, содержащее средство для мониторинга, по меньшей мере, одного рабочего параметра, из которого может быть выведен коэффициент нагрузки электродвигателя.
Уровень техники
При перекачке жидкости, такой как сточные воды, содержащие твердое вещество, используя, например, погружной насос, твердое вещество рано или поздно окажет негативное влияние на пропускную способность насоса по транспортировке жидкости. Твердое вещество захватывается в гидравлическом модуле насоса и постепенно прилипает к крыльчатке насоса, а также внутри корпуса насоса, и, таким образом, оказывает негативное влияние на гидравлическую эффективность насоса, и насос начинает работать в напряженных рабочих условиях вследствие повышенного сопротивления вращению, увеличенного момента инерции и ухудшенным гидравлическим свойствам. В настоящее время существует несколько известных способов для более или менее автоматической очистки насоса, когда насос или, более точно, гидравлический модуль насоса начинает засоряться. Напряженные рабочие условия не являются критическими для насоса, но приводят к большему потреблению тока и плохим рабочим характеристикам насоса, что в результате приводит к повышению расходов владельца установки и что может привести к неблагоприятным последствиям, таким как затопленная насосная станция, когда полезная мощность насоса будет недостаточной для опорожнения насосной станции.
Известные способы очистки или способы управления наносным средством являются относительно грубыми, и в них отсутствует возможность анализа коэффициента нагрузки электродвигателя и какие последствия могут иметь разные коэффициенты нагрузки. Известные способы очистки детектируют, что требуется очистка, и затем выполняется заданная стандартная последовательность очистки, которая, по меньшей мере, приводит к тому, что электродвигатель насоса будет заторможен ввиду того, что блок управления устанавливает скорость вращения электродвигателя в длительном, заранее определенном режиме со сниженной скоростью работы. Известно, что резкая остановка электродвигателя насоса является нежелательной/не рекомендуется прежде всего из-за требований исключения так называемого гидроудара в системе труб, расположенных после насоса, но также и из-за большого момента инерции и большого момента крыльчатки насоса при нормальной работе. Если электродвигатель будет резко остановлен, неизбежно возникает гидроудар, когда кинетическая энергия жидкости и момента инерции в трубопроводах, расположенных после насоса, создает вибрацию, что приводит к риску разрушения трубопроводов и других инженерных компонентов, и, кроме того, при этом неизбежен риск срыва крыльчатки с вала, повреждение вала насоса и т.д. Таким образом, всегда выполняют длительное, управляемое замедление скорости вращения электродвигателя.
Прямое следствие недостаточной продуманности способа очистки состоит в том, что используется стандартная последовательность очистки, и которая является адекватной в напряженных рабочих условиях, как описано выше, значительно увеличивает коэффициент нагрузки на насос, когда крупный и/или твердый объект попадает в гидравлический модуль насоса и застревает в нем, то есть когда возникают критические рабочие условия для наносного средства. Под критическими рабочими условиями понимают рабочие условия, которые немедленно или в ближайшей перспективе приводят к поломке насоса и/или блока управления. Когда блок управления, например, в форме преобразователя частоты (VFD, частотно-регулируемый привод (ЧРП)), выполняет упомянутое замедление, когда крупный и/или твердый объект заклинивает и механически тормозит крыльчатку, длительное, управляемое замедление приводит к тому, что электродвигатель вынуждает крыльчатку вращаться и объект заклинивает еще сильнее/еще тяжелее. Это приводит, в свою очередь к тому, что происходит перегрузка и повреждение крыльчатки, ведущего вала, электродвигателя и т.д. насоса или блока управления.
Для предотвращения повреждения насоса и/или блока управления в настоящее время используются различные системы безопасности/защитное оборудование, такие как защитные переключатели электродвигателя, плавкие предохранители и т.д., которые установлены для защиты оборудования и которые срабатывают перед повреждением оборудования. Обычно при возникновении критических рабочих условий, представленных выше, то есть когда срабатывает система обеспечения безопасности и/или происходит торможение насосного средства, требуется, чтобы обслуживающий персонал выполнил аварийное отключение и прибыл для исправления ошибки/засорения. Такие отключения являются дорогостоящими сами по себе, и, кроме того, неработающий насос приводит к большим расходам владельца установки.
Цель изобретения
Настоящее изобретение направлено на устранение упомянутых выше недостатков и отказов ранее известных способов очистки и обеспечивает улучшенный способ для управления насосным средством. Основная цель изобретения состоит в том, чтобы обеспечить улучшенный способ управления насосным средством такого типа, как определено во вводной части, которая анализирует коэффициент нагрузки электродвигателя и действует по-разному в зависимости от мгновенных рабочих условий.
Другая цель настоящего изобретения состоит в том, чтобы обеспечить способ управления насосным средством, который практически полностью предотвращает необходимость аварийных отключений, выполняемых обслуживающим персоналом.
Сущность изобретения
В соответствии с изобретением, по меньшей мере, первичная цель достигается с помощью способа, определенного во вводной части и имеющего свойства, определенные в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения, кроме того, определены в зависимых пунктах формулы изобретения.
В соответствии с первым аспектом настоящего изобретения, предусмотрен способ для управления насосным средством такого типа, как определено во вводной части, который отличается тем, что содержит следующие этапы:
- определяют реальное значение упомянутого, по меньшей мере, одного рабочего параметра, когда насос находится в упомянутом активном состоянии,
- на основе упомянутого реального значения упомянутого, по меньшей мере, одного рабочего параметра определяют, воздействует ли приложенная внешне сила на электродвигатель в такой степени, что инициируется критическое рабочее состояние для насосного средства, что справедливо, когда коэффициент нагрузки электродвигателя превышает критический уровень для насосного средства,
- выполняют переключение состояния из активного состояния насоса в неактивное состояние насоса, если инициируется критическое рабочее состояние для насосного средства, упомянутое переключение состояния содержит этап, выполняемый блоком управления, сразу после определения, что было инициировано критическое рабочее состояние для насосного средства, выполняют резкое прерывание привода электродвигателя в упомянутом первом направлении.
Таким образом, настоящее изобретение основано на понимании того, что в результате выполнения разных типов мер, в зависимости от коэффициента нагрузки электродвигателя, сохраняется рабочее состояние насосного средства, и количество отключений, выполняемых технической службой в большей или меньшей степени, может быть полностью исключено.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, способ также содержит следующие этапы:
- на основе упомянутого реального значения упомянутого, по меньшей мере, одного рабочего параметра определяют, воздействует ли внешняя сила на электродвигатель до такой степени, что инициируется рабочее состояние, приводящее к напряженной работе насосного средства, что является справедливым, когда коэффициент нагрузки электродвигателя превышает уровень, при котором происходит напряженная работа насосного средства, и
- выполняют переключение состояния из активного состояния насоса в состояние очистки насоса, если было инициировано напряженное рабочее состояние насосного средства.
Таким образом, насосным средством управляют по-разному, в зависимости от того, соответствует ли характер засорения критическому рабочему состоянию и напряженному рабочему состоянию соответственно.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, способ также содержит следующий этап:
- выполняют переключение состояния из активного состояния насоса в состояние очистки насоса, если постоянно осуществляли привод электродвигателя в упомянутом первом направлении в течение заданного второго периода времени (T2).
Таким образом, выполняют очистку для удаления засорений, которые являются недостаточно сильными, для детектирования напряженного рабочего состояния, но которое, тем не менее, неблагоприятно влияет на гидравлические свойства насоса.
Дополнительные преимущества и особенности изобретения можно видеть в других независимых пунктах формулы изобретения, а также, как и в следующем подробном описании предпочтительных вариантов осуществления.
Краткое описание чертежей
Более полное понимание упомянутых выше и других свойств и преимуществ настоящего изобретения будет получено из следующего подробного описания предпочтительных вариантов осуществления, при этом делается ссылка на приложенные чертежи, на которых:
на фиг. 1 представлена схематическая иллюстрация установки насоса,
на фиг. 2 показана блок-схема последовательности операций, представляющая предпочтительный вариант воплощения способа в соответствии с изобретением,
на фиг. 3 показана блок-схема последовательности операций, представляющая подспособ "Очистка",
на фиг. 4 показана схема, которая схематично представляет, как текущее потребление тока I изменяется в течение длительного времени T и когда был детектирован критический режим работы,
на фиг. 5 показана схема, соответствующая представленной на фиг. 4, когда был детектирован напряженный режим работы первого типа,
на фиг. 6 показана схема, соответствующая представленной на фиг. 5, когда был детектирован напряженный режим работы второго типа, и
на фиг. 7 показана схема, соответствующая представленной на фиг. 4, когда была детектирована потребность очистки на основе времени.
Подробное описание изобретения
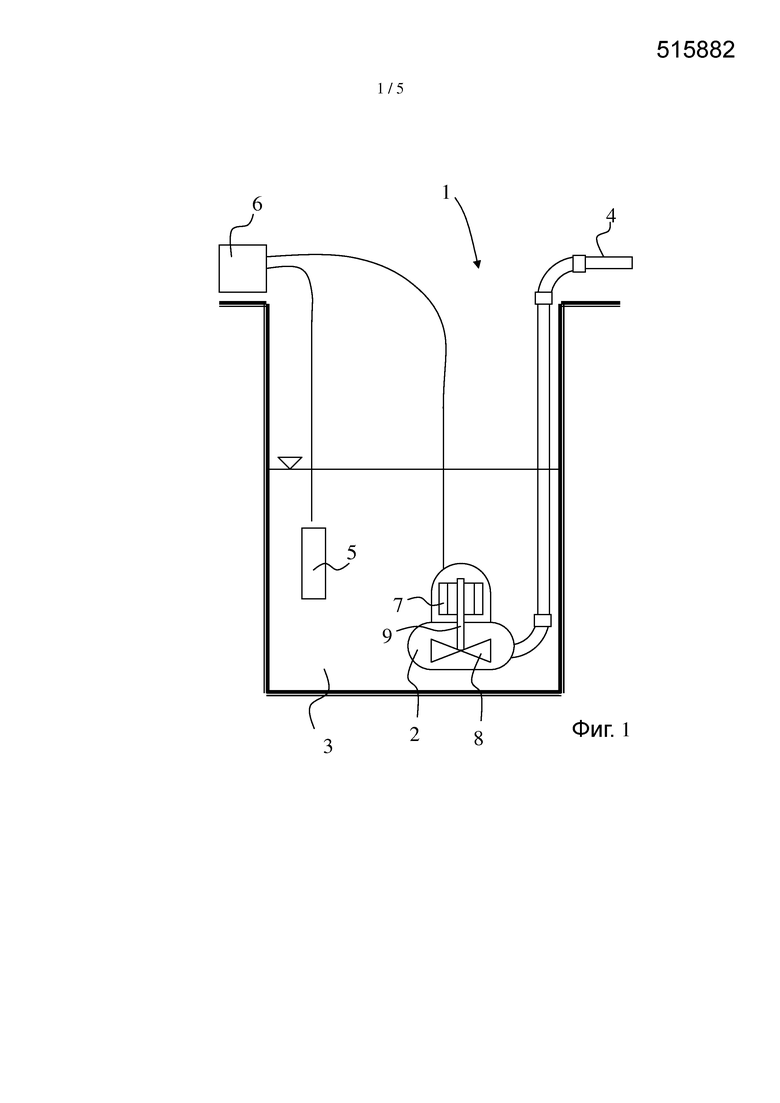
На фиг. 1 представлена насосная станция, в общем обозначенная ссылочной позицией 1, содержащая, по меньшей мере, один насос 2 с управляемой скоростью, обычно два погружных насоса, установленных с возможностью перекачки жидкости из резервуара (сборника) 3, включенного в насосную станцию 1, в выпускную трубу 4 и дальше из насосной станции 1. Кроме того, обычно насосная станция 1 содержит, по меньшей мере, одно устройство 5 измерения уровня, выполненное с возможностью определения уровня жидкости в насосной станции 1. Следует указать, что устройство 5 измерения уровня может представлять собой отдельное устройство, которое функционально соединено с внешним блоком 6 управления, будучи функционально соединенным с упомянутым, по меньшей мере, одним из насоса 2 с управляемой скоростью, встроенным в упомянутый, по меньшей мере, один насос 2 с управляемой скоростью и т.д. Упомянутый, по меньшей мере, один насос 2 с управляемой скоростью предпочтительно функционально соединен с внешним блоком 6 управления с целью обеспечения возможности регулирования скорости вращения насоса; в качестве альтернативы упомянутый, по меньшей мере, один из насоса 2 с управляемой скоростью может содержать встроенный блок управления (не показан). Ниже упомянутый блок 6 управления будет использоваться независимо от его физического местоположения.
Вместе насос 2 и блок 6 управления формируют, по меньшей мере, одну часть насосного средства, в которой насос 2 содержит электродвигатель 7, который установлен с возможностью его привода упомянутым блоком 6 управления, и крыльчатку 8, которая соединена с электродвигателем 7 через ведущий вал 9 обычным способом.
Выражение "с управляемой скоростью" охватывает все физически выполнимые способы изменения скорости вращения насоса или, более точно, скорости вращения электродвигателя 7, прежде всего, при этом делается ссылка на управление частотой тока питания с помощью преобразователя частоты (VFD), который встроен в насос или который выполнен отдельно и который представляет собой пример упомянутого блока 6 управления, при этом скорость вращения пропорциональна частоте тока питания. Однако, помимо внутреннего или внешнего управления напряжением питания, также предусмотрен внутренний механический тормоз, который предпочтительно действует на ведущий вал насоса и т.д. Таким образом, с точки зрения понимания изобретения не так важно, каким образом регулируют скорость вращения насоса, а важно только, чтобы скорость вращения насоса 2 можно было регулировать/управлять ею.
Способ, в соответствии с изобретением, направлен на управление насосным средством, которое содержит насос 2, имеющий электродвигатель 7 и блок 6 управления, с целью достижения адаптированной очистки на основе мгновенного рабочего состояния насоса 2. В этой связи насосную станцию 1 следует рассматривать как ограниченную установку, в которую подают поступающую жидкость и из которой откачивают исходящую жидкость. Насосную станцию, в соответствии с настоящим изобретением, следует рассматривать независимо от типа жидкости и независимо от того, куда эта жидкость поступает и куда эту жидкость следует перекачивать. В случае, когда насосная станция содержит множество насосов 2, между ними может происходить соответствующее чередование, что, однако, не рассматривается здесь.
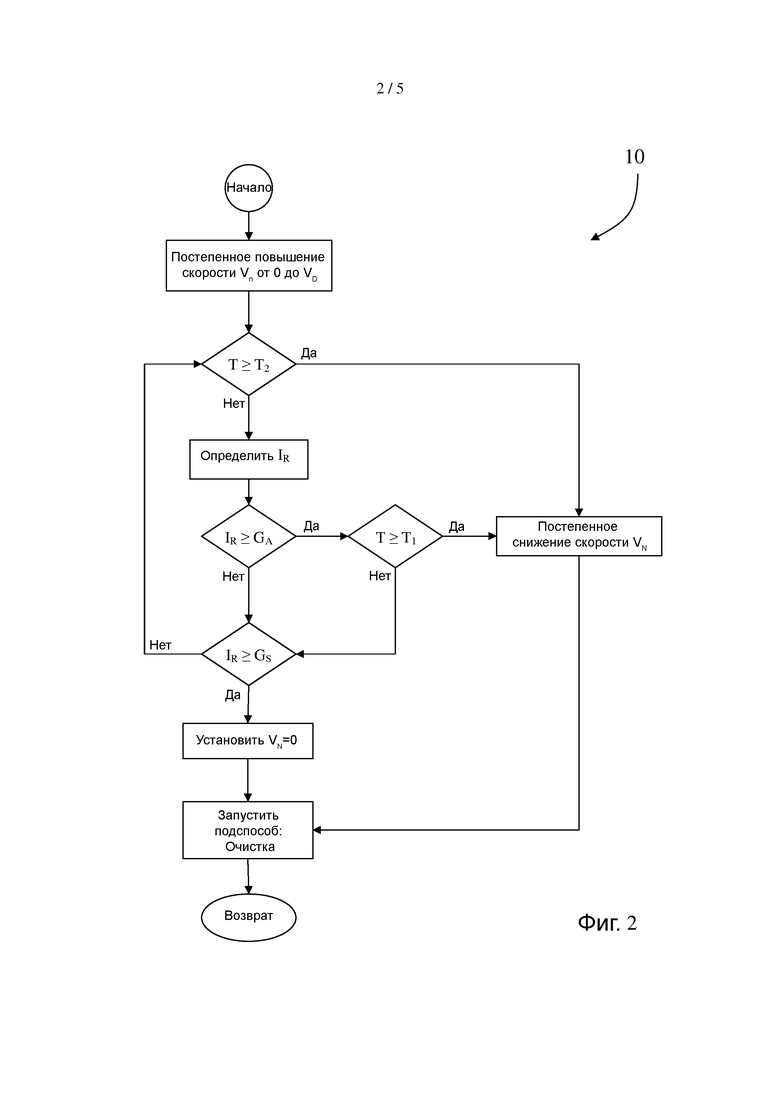
На фиг. 2 показан предпочтительный вариант осуществления способа, в общем, обозначенный номером 10, для управления насосным средством, содержащим насос 2 и блок 6 управления. Следует отметить, что способ 10, в соответствии с изобретением, может быть расширен, используя один или больше подспособов, и/или может работать параллельно с другими способами управления.
Способ 10, в соответствии с изобретением для управления насосным средством, на практике представляет собой способ очистки насоса, который полностью или частично засорился. Степень засорения и/или характер засорения создают нагрузку на электродвигатель 7 насоса 2 и обозначают рабочее состояние насосного средства. Таким образом, в каждый отдельный момент времени, когда насос 2 находится в активном состоянии, и электродвигатель 7 приводят во вращение в первом направлении с помощью блока 6 управления, электродвигатель 7 связывают (ассоциируют) с коэффициентом нагрузки, который соответствует рабочему состоянию насосного средства. Насосное средство также содержит средство для периодического или постоянного мониторинга (отслеживания), по меньшей мере, одного рабочего параметра, из которого можно вывести коэффициент нагрузки, крутящий момент и скорость вращения электродвигателя 7 или путем непосредственного измерения, или путем вывода из результатов измерения другого рабочего параметра/количественного показателя. Упомянутый рабочий параметр, например, представляет собой потребление тока (I), потребляемую мощность (P), крутящий момент (M), скорость вращения (об/мин) и т.д. или их комбинации. В действительности коэффициент нагрузки электродвигателя 7 меняется, что означает, что крутящий момент и скорость вращения меняются, когда гидравлический модуль насоса 2 полностью ли частично засорен. Прямой эффект этого состоит в том, что потребление тока, потребляемая мощность и т.д. насоса меняются в соответствующей степени, из чего можно вывести коэффициент нагрузки электродвигателя 7, например, потребление тока электродвигателем. Предпочтительно реальное потребление IR тока насоса 2 или, более точно, электродвигателя 7 отслеживают, когда насос 2 находится в упомянутом выше активном состоянии, и ниже изобретение будет описано с использованием этого момента как исходной точки. Однако следует понимать, что изобретение не ограничено измерением потребляемого тока, в качестве рабочего параметра.
Далее способ 10, в соответствии с изобретением, в его самой основной форме будет описан со ссылкой на фиг. 2 и 4.
В способе 10 предполагается, что насос 2 находится в его активном состоянии, и привод электродвигателя 7 выполняется в первом направлении от блока 6 управления. При таком соединении и при нормальной работе упомянутое первое направление представляет собой направление, которое обеспечивает передачу крыльчаткой 8 жидкости из резервуара 3 в выпускную трубу 4, то есть электродвигатель 7 приводят в движение в направлении вперед. При запуске насоса 2, то есть из неактивного состояния насоса 2, блок 6 управления обеспечивает управляемое, например линейное, постепенное повышение номинальной скорости (VN) вращения электродвигателя 7 от 0 до заданной рабочей скорости (VD), которая, например, составляет приблизительно 75-85%, так называемой максимальной скорости вращения (vmax) электродвигателя 7. Максимальная скорость вращения электродвигателя 7 представляет собой скорость вращения, которую электродвигатель 7 имеет, когда насос 2 непосредственно соединен с сетью (то есть обычно с частотой тока питания 50 Гц или 60 Гц). Рабочая скорость (Vt) может составлять, например, установленное вручную значение или может представлять собой автоматически оптимизированное значение на основе мгновенного потребления энергии и т.д.
Когда насос 2 находится в упомянутом активном состоянии, способ 10 содержит этап определения реального значения упомянутого, по меньшей мере, одного рабочего параметра; в описанном варианте осуществления определяют реальное потребление (IR) тока. Реальное потребление (IR) тока меняется во время нормальной работы вокруг номинального значения потребления (IN) тока из-за попадания твердого материала, находящегося в перекачиваемой жидкости, что влияет на гидравлический модуль насоса 2, и который транспортируют через него и который, таким образом, оказывает мгновенное влияние на коэффициент нагрузки электродвигателя 7.
Затем выполняют этап определения на основе упомянутого реального значения упомянутого, по меньшей мере, одного рабочего параметра, воздействует ли приложенная внешне сила на электродвигатель 7 в такой степени, что инициируется рабочее состояние, которое оказывает критическое влияние на насосное средство, что справедливо, когда коэффициент нагрузки электродвигателя 7 превышает уровень, при котором оказывается критическое влияние на насосное средство 7. Под рабочим состоянием, при котором оказывается критическое воздействие, следует понимать рабочее состояние, которое немедленно или через короткий срок приведет к перегрузке насоса 2 и/или блока 6 управления и к поломке в случае продолжения привода электродвигателя 7, в качестве альтернативы приводит к срабатыванию системы безопасности/защитного оборудования. Рабочее состояние, оказывающее критическое воздействие, является неизбежным, когда крупный и/или твердый объект попадает в гидравлический модуль насоса 2 и заклинивается между крыльчаткой 8 и корпусом насоса. Ниже представлены примеры, как выполняется этап определения, воздействует ли внешне приложенная сила на электродвигатель 7.
Далее выполняется этап переключения состояния из активного состояния насоса 2 в неактивное состояние насоса 2, если будут инициированы рабочие условия, оказывающие критическое влияние на насосное средство, упомянутое переключение состояния, в свою очередь, содержит этап, выполняемый блоком 6 управления, непосредственно после определения того, что инициировалось рабочее состояние, оказывающее критическое влияние на насосное средство, резкого прерывания привода электродвигателя 7 в упомянутом первом направлении. Свойство резкого прерывания привода реализуется путем установки в 0 номинальной скорости (VN) вращения электродвигателя 2 в блоке 6 управления, то есть без постепенного уменьшения скорости вращения электродвигателя 7, или путем установки в 0 номинальной скорости вращения (VN) электродвигателя 2, путем отключения электродвигателя 7, то есть электродвигатель 7 полностью обесточивается. Это приводит к тому, что посторонний объект, который попал в гидравлический модуль насоса 2 и который заклинил, не будет заклинивать еще сильнее или хуже.
В предпочтительном варианте осуществления, показанном на фиг. 4, этап определения, воздействует ли внешняя сила на электродвигатель 7 в такой степени, что инициируется рабочее состояние, оказывающее критическое влияние на насосное средство 1, содержит этап определения, равно или превышает упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра заданному критическому пороговому значению (Ge). Другими словами, проверяют, равно или превышает действительное текущее потребление IR тока заданному критическому пороговому значению (Gs) потребления тока. Предпочтительно значение упомянутого критического порогового значения (Gs) на 70-90%, наиболее предпочтительно на 75-85% больше, чем номинальное значение рабочего параметра, например, номинально потребляемого (In) тока.
В соответствии с альтернативным вариантом осуществления (который не показан), этап определения, воздействует ли на электродвигатель 7 внешняя сила в такой степени, что инициируется критическое рабочее состояние для насосного средства 1, содержит вместо этого этап определения, находится ли упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра за пределами заданного критического интервала (RS). Упомянутый критический интервал (RS) может быть равномерно или неравномерно распределен вокруг номинального значения рабочего параметра, например, номинального потребления (IN) тока.
В соответствии с дополнительным альтернативным вариантом осуществления (не показан), этап определения, воздействует ли внешняя сила на электродвигатель 7 в такой степени, что инициируется критическое рабочее состояние для насосного средства 1, содержит вместо этапа определения, равна или превышает разность между упомянутым реальным значением и заданным номинальным значением рабочего параметра, когда насос 2 находится в активном состоянии, заданное пороговое критическое значение (Ds) разности. В описанном варианте осуществления разность определяют между реальным потреблением (IR) тока и номинальным потреблением (In) тока.
Далее снова в основном будет представлено описание со ссылкой на фиг. 2 в комбинации с фиг. 5 и 6. Способ 10, в соответствии с изобретением, предпочтительно содержит также этап определения, на основе упомянутого реального значения упомянутого, по меньшей мере, одного рабочего параметра, воздействует ли внешняя сила на электродвигатель 7 в такой степени, что инициируется рабочее состояние, приводящее к напряженное (затрудненной) работе насосного средства 1, что справедливо для случая, когда коэффициент нагрузки электродвигателя 7 превышает уровень напряженной работы насосного средства 1, и выполняют этап переключения состояния из активного состояния насоса 2 в состояние очистки насоса 2, если инициируется рабочее состояние, приводящее к напряженной работе насосного средства 1. Рабочим состоянием, при котором возникает напряженное (затрудненное) рабочее состояние, называется рабочее состояние, которое относительно медленно приводит к повышению потребления тока и вредно влияет на рабочие характеристики/гидравлические свойства насоса, в котором насос 2 и/или блок 6 управления находится в состоянии ненужного напряжения. Напряженное рабочее состояние неизбежно возникает, когда твердое вещество захватывается в гидравлическом модуле насоса и медленно прилипает к крыльчатке насоса 2, а также к внутренней части корпуса насоса в насосе 2, см. фиг. 5. В качестве альтернативы напряженное рабочее состояние (рабочее состояние при механическом напряжении) неизбежно возникает, когда входное отверстие насоса 2 полностью или в значительной степени закупорено крупным объектом, который не попадает в гидравлический модуль насоса 2 и, таким образом, предотвращает протекание жидкости в насос 2, см. фиг. 6. Примеры того, как выполняется этап определения, воздействует ли приложенная внешне сила на электродвигатель 7, представлены ниже.
Упомянутое переключение из активного состояния насоса 2 в состояние очистки насоса 2 содержит предпочтительно этап уменьшения скорости вращения электродвигателя 7 в упомянутом первом направлении, в соответствии с заданным, управляемым, например, линейным постепенным понижением до 0 номинальной скорости (Vm) вращения электродвигателя 7.
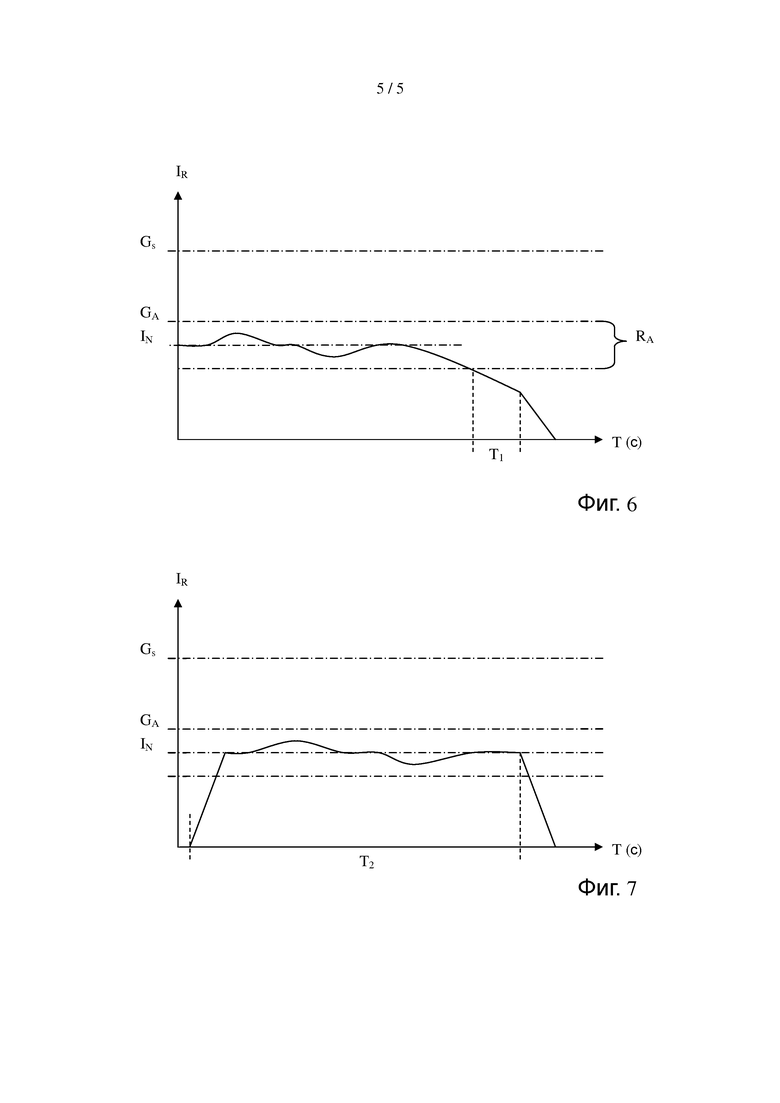
В предпочтительном варианте осуществления, показанном на фиг. 5, этап определения, воздействует ли внешняя сила на электродвигатель 7 в такой степени, что инициируется рабочее состояние, при котором происходит напряжение насосного средства 1, содержит этап определения, равно или превышает упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра заданное пороговое значение (GA) напряжения в течение заданного первого периода времени (T1). Другими словами, проверяют, равно или превышает реальное потребление (IR) тока заданное пороговое значение (GA) напряжения для потребляемого тока в течение заданного периода времени, который предпочтительно больше, чем 5 с. Предпочтительно значение упомянутого порогового значения (GA) напряжения на 10-30%, наиболее предпочтительно на 15-25% больше, чем номинальное значение рабочего параметра, например, номинального потребления (IN) тока.
В соответствии с альтернативным вариантом осуществления (не показан), этап определения, воздействует ли внешняя сила на электродвигатель 7 в такой степени, что инициируется рабочее состояние, вызывающее напряжение насосного средства 1, содержит вместо этого этап определения, находится ли упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра за пределами заданного интервала (RA) напряжения (затруднения) в течение заданного первого периода времени (T1). Упомянутый интервал (RA) напряжения может быть равномерно, а также неравномерно распределен вокруг номинального значения рабочего параметра, например, номинального потребления (IN) тока.
В соответствии с дополнительным альтернативным вариантом осуществления (не показан), этап определения, воздействует ли внешняя сила на электродвигатель 7 в такой степени, что инициируется рабочее состояние, приводящее к напряжению насосного средства 1, содержит вместо этапа определения, равна или превышает разность между упомянутым реальным значением и заданным номинальным значением, когда насос 2 находится в активном состоянии, заданное пороговое значение (DA) разности при возникновении напряжения в течение заданного первого промежутка времени (T1). В описанном варианте осуществления определяют разность между реальным потреблением (IR) тока и номинальным потреблением (IN) тока.
В тех случаях, когда способ 10 содержит детектирование критического рабочего состояния, а также рабочего состояния с напряжением, критическое пороговое значение (Gs) для упомянутого, по меньшей мере, одного рабочего параметра должно быть, по меньшей мере, на 20% больше, чем пороговое значение (GA) напряжения упомянутого, по меньшей мере, одного из рабочих параметров. В качестве альтернативы интервал (RS), критический для упомянутого, по меньшей мере, одного рабочего параметра, должен быть больше, чем и должен включать в себя интервал (RA) напряжения упомянутого, по меньшей мере, одного рабочего параметра. Далее, в качестве альтернативы, критическое пороговое значение (Ds) разности для упомянутого, по меньшей мере, одного рабочего параметра должно быть, по меньшей мере, в два раза больше, чем пороговое значение (DA) разности напряжения упомянутого, по меньшей мере, одного рабочего параметра.
Далее снова будет представлено описание, в основном, на фиг. 2 в комбинации с фиг. 7. Способ 10, в соответствии с изобретением, также содержит предпочтительно этап осуществления переключения состояния из активного состояния насоса 2 в состояние очистки насоса 2, если электродвигатель 7 постоянно приводился в упомянутом первом направлении вращения в течение заданного второго периода времени (T2). Другими словами, насос 2 должен через равномерные интервалы выполнять очистку, даже если напряженное состояние или критическое засорение не были детектированы. Упомянутое переключение состояния из активного состояния насоса 2 в состояние очистки насоса 2 содержит предпочтительно этап уменьшения скорости вращения электродвигателя 7 в упомянутом первом направлении в соответствии с заданным, управляемым, например, линейным понижением до 0 номинальной скорости (VN) вращения электродвигателя 7.
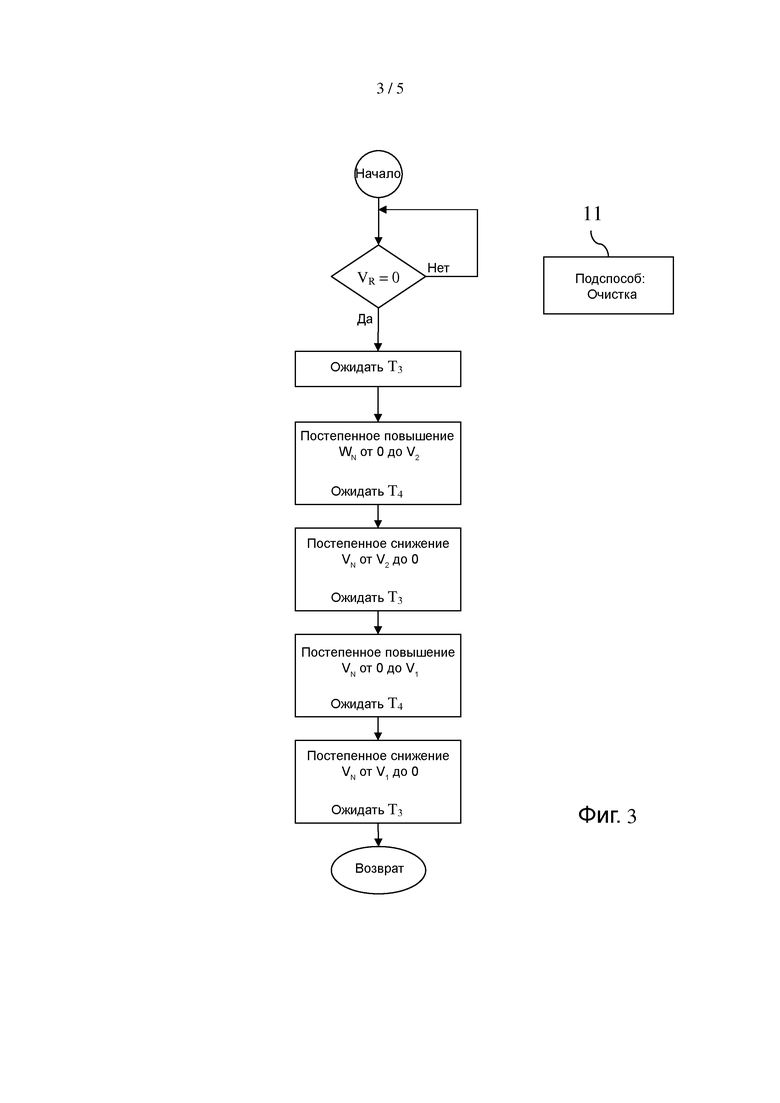
Далее будет сделана ссылка, по существу, на фиг. 3. В завершение способа 10, в соответствии с изобретением, выполняется подспособ, который, в общем, обозначен номером 11 и выполняется под обозначением "Очистка". Следует отметить, что способ 10, в соответствии с изобретением, может содержать разные типы подспособов для очистки, подключаемых на основе, было ли детектировано критическое или напряженное (затрудненное) рабочее состояние соответственно. Ниже, однако, будет описан один и тот же подспособ 11.
Подспособ 11 содержит этапы остановки электродвигателя 7 и поддержания электродвигателя 7 в остановленном состоянии в течение заданного третьего периода времени (T3). Таким образом, выполняется автоматическая обратная промывка гидравлического модуля насоса 2, в результате чего твердое вещество вымывается из насоса 2.
Кроме того, подспособ 11 предпочтительно содержит этапы увеличения номинальной скорости (VN) вращения электродвигателя 7 от 0 до второй скорости (V2) вращения очистки во втором направлении, противоположном первому направлению, в соответствии с заданным постепенным повышением скорости вращения электродвигателя 7, выполнения привода электродвигателя 7 в упомянутом втором направлении в течение заданного четвертого периода времени (T4), уменьшения номинальной скорости (VN) вращения электродвигателя 7 от упомянутой второй скорости (V2) вращения очистки в упомянутом втором направлении до 0, в соответствии с заданным постепенным уменьшением скорости вращения электродвигателя 7, и поддержания электродвигателя 7 в остановленном состоянии в течение упомянутого заданного третьего периода времени (T3). Таким образом, получают повышенную турбулентность в гидравлическом модуле насоса 2, что приводит к отрыву твердого вещества и перекачке его назад из насоса 2; кроме того, возникает эффект, когда крупные и/или твердые объекты, которые были захвачены в гидравлическом модуле насоса 2, будут высвобождаться.
Затем подспособ 11 предпочтительно содержит этапы увеличения номинальной скорости (VN) вращения электродвигателя 7 от 0 до первой скорости (Vi) вращения очистки в первом направлении в соответствии с заданным постепенным повышением скорости вращения электродвигателя 7, привода электродвигателя 7 в упомянутом первом направлении в течение заданного четвертого периода времени (T4), понижения номинальной скорости (VN) вращения электродвигателя 7 от упомянутой первой скорости (Vi) вращения очистки в упомянутом первом направлении до 0, в соответствии с заданным постепенным понижением скорости вращения электродвигателя 7, и поддержания электродвигателя 7 в остановленном состоянии в течение упомянутого заданного третьего периода времени (T3). Таким образом, получают дополнительное увеличение турбулентности в гидравлическом модуле насоса 2, что приводит к тому, что твердое вещество отрывается и откачивается из насоса 2; кроме того, обеспечивается улучшенный эффект, при котором крупные и/или твердые объекты, которые были захвачены в гидравлическом модуле насоса 2, будут высвобождаться.
Упомянутыми постепенными повышениями скорости предпочтительно управляют, например, линейно, выполняя при этом постепенное повышение номинальной скорости (VN) вращения электродвигателя 7 от 0 до заданной второй скорости (v2) вращения очистки в упомянутом втором направлении и до заданной первой скорости (V1) вращения очистки в упомянутом первом направлении соответственно. Кроме того, упомянутыми постепенными понижениями скорости предпочтительно управляют, например, линейно, выполняя понижение номинальной скорости (VN) вращения электродвигателя 7 от заданной второй скорости (V2) вращения очистки во втором направлении и от заданной первой скорости (Vi) вращения очистки в первом направлении, соответственно, до 0. Величина первой скорости (Vi) вращения очистки предпочтительно равна максимальной скорости (Vmax) вращения электродвигателя 7, и магнитуда второй скорости (V2) вращения очистки предпочтительно равна 80% от максимальной скорости (Vmax) вращения электродвигателя. Указанный третий период времени (T3) и упомянутый четвертый период времени (T4) предпочтительно длиннее, чем 5 с каждый.
Выполнимые на практике модификации изобретения
Изобретение не ограничено только вариантами осуществления, описанными выше и представленными на чертежах, цель которых состоит только в иллюстрации и представлении примеров. Данная патентная заявка предназначена для охвата всех описанных здесь адаптаций предпочтительных вариантов осуществления, и, следовательно, настоящее изобретение определено формулировками приложенных пунктов формулы изобретения и их эквивалентами. В соответствии с этим оборудование может быть модифицировано во всех реально выполнимых способах в пределах объема приложенной формулы изобретения.
Следует отметить, что, даже если не будет в явном виде упомянуто, что свойство одного конкретного варианта осуществления может быть скомбинировано со свойствами другого варианта осуществления, это следует рассматривать как очевидное, когда это возможно.
В данном описании и в последующей формуле изобретения, если только контекст не обозначает нечто другое, следует понимать, что слово "содержать" и его варианты, такие как "содержит" или "содержащий", означают включение обозначенного модуля или этапа, или группы модулей, или этапов, но не исключение других модулей или этапов, или групп модулей, или этапов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ НАСОСНОЙ УСТАНОВКОЙ | 2015 |
|
RU2680181C2 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ МОЩНОСТИ, РАСХОДУЕМОЙ ТРАНСПОРТНОЙ СИСТЕМОЙ | 2003 |
|
RU2314215C2 |
| Способ мониторинга энергопотребления оборудования для добычи нефти и газа | 2023 |
|
RU2801699C1 |
| СПОСОБ РЕГУЛИРОВКИ РАБОТЫ СИСТЕМЫ ЛОПАСТНЫХ НАГНЕТАТЕЛЕЙ ПРИ ПЕРЕМЕННОЙ НАГРУЗКЕ | 2003 |
|
RU2230938C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ УСТАНОВКИ ДЛЯ ДОБЫЧИ УГЛЕВОДОРОДОВ | 1999 |
|
RU2209942C2 |
| Способ регулирования энергопотребления нефтедобывающего скважинного оборудования | 2022 |
|
RU2773403C1 |
| Установка для уничтожения неприятных запахов "Мокрый барьер" | 2016 |
|
RU2633081C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГОПОТРЕБЛЕНИЕМ НАСОСНОЙ СТАНЦИИ | 2006 |
|
RU2310792C1 |
| НАСОС ДЛЯ СТЕРИЛИЗАЦИОННОГО УСТРОЙСТВА | 2012 |
|
RU2589259C2 |
| СИСТЕМА И СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ АКТИВНОЙ МОЩНОСТИ НА НАГРУЗКЕ | 2010 |
|
RU2528621C2 |

Изобретение относится к способу управления насосным средством, содержащим насос (2) с электродвигателем (7), блок (6) управления электродвигателем (7) и средство для мониторинга, по меньшей мере, одного рабочего параметра, из которого может быть выведен коэффициент нагрузки электродвигателя (7), который соответствует рабочим условиям насосного средства. Когда насос (2) находится в активном состоянии, электродвигатель (7) приводят в действие в первом направлении. Способ содержит этапы определения реального значения, по меньшей мере, одного рабочего параметра, определения, воздействует ли приложенная внешне сила на электродвигатель (7) в такой степени, что инициируется критическое рабочее состояние для насосного средства, выполнения переключения состояния из активного состояния в неактивное состояние насоса (2), если инициируется критическое рабочее состояние для насосного средства. Переключение состояния выполняют резким прерыванием блоком (6) управления сразу после определения, что было инициировано критическое рабочее состояние, привода электродвигателя (7) в упомянутом первом направлении за счет установки номинальной скорости вращения электродвигателя (7), равной нулю в блоке (6) управления. Изобретение направлено на улучшение способа управления насосным средством за счет анализа коэффициента нагрузки электродвигателя и изменения работы в зависимости от мгновенных рабочих условий и предотвращения аварийных отключений, выполняемых обслуживающим персоналом. 14 з.п. ф-лы, 7 ил.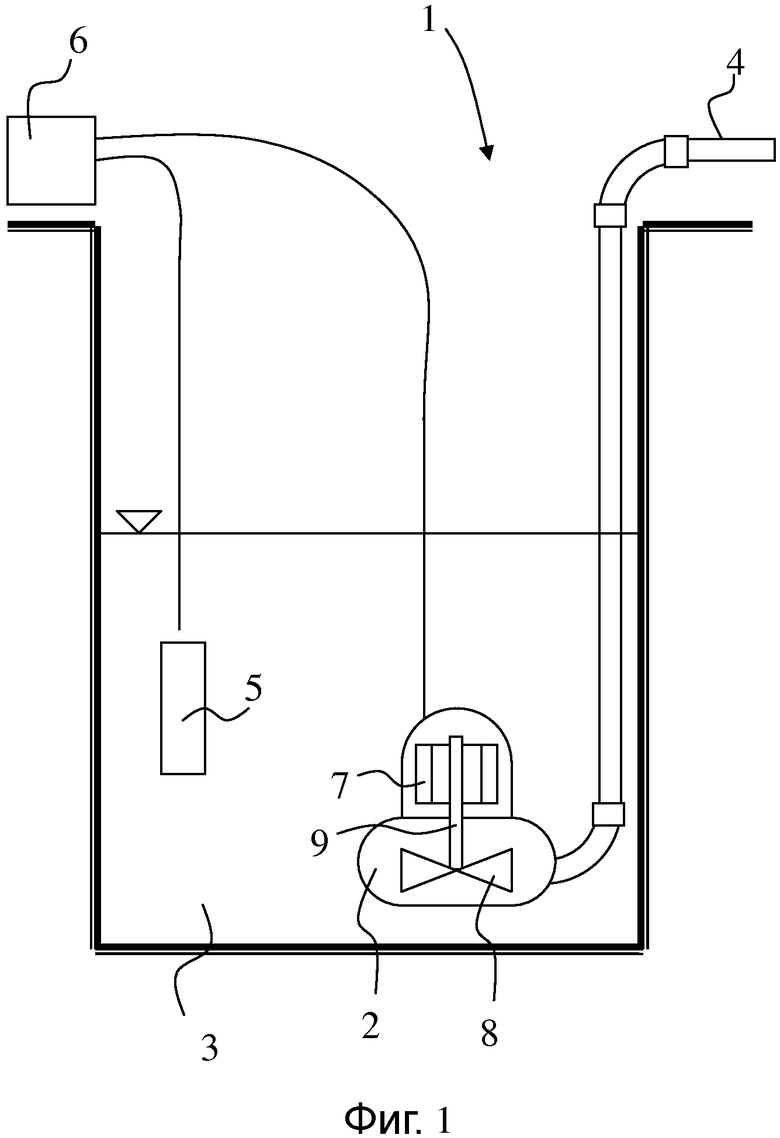
1. Способ для управления насосным средством, содержащим насос (2) и блок (6) управления, причем насос (2), содержащий электродвигатель (7) и блок (6) управления, выполнен с возможностью привода упомянутого электродвигателя (7),
упомянутый электродвигатель (7), в каждый отдельный момент времени, когда насос (2) находится в активном состоянии и электродвигатель (7) приводится в действие в первом направлении, связан с коэффициентом нагрузки, который соответствует рабочим условиям насосного средства,
насосное средство дополнительно содержит средство для мониторинга, по меньшей мере, одного рабочего параметра, из которого может быть выведен коэффициент нагрузки электродвигателя (7), причем способ содержит этапы, на которых:
- определяют реальное значение упомянутого, по меньшей мере, одного рабочего параметра, когда насос (2) находится в упомянутом активном состоянии,
- на основе упомянутого реального значения упомянутого, по меньшей мере, одного рабочего параметра определяют, воздействует ли внешне приложенная сила на электродвигатель (7) в такой степени, что инициируется критическое рабочее состояние для насосного средства, что справедливо, когда коэффициент нагрузки электродвигателя (7) превышает критический уровень для насосного средства,
- выполняют переключение состояния из активного состояния насоса (2) в неактивное состояние насоса (2), если инициируется критическое рабочее состояние для насосного средства, упомянутое переключение состояния содержит этап блока (6) управления, сразу после определения, что было инициировано критическое рабочее состояние для насосного средства, выполняют резкое прерывание привода электродвигателя (7) в упомянутом первом направлении за счет установки номинальной скорости вращения электродвигателя (7), равной нулю в блоке (6) управления.
2. Способ по п. 1, в котором этап определения, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется критическое рабочее состояние для насосного средства, содержит следующий этап, на котором:
- определяют, равно или превышает упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра заданное критическое пороговое значение (Gs).
3. Способ по п. 1, в котором этап определения, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется критическое рабочее состояние для насосного средства, содержит следующий этап:
- определяют, находится ли упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра за пределами заданного критического интервала (RS).
4. Способ по п. 1, в котором этап определения, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется критическое рабочее состояние для насосного средства, содержит следующий этап, на котором:
- определяют, равна или превышает разность между упомянутым реальным значением и заданным номинальным значением, когда насос (2) находится в активном состоянии, заданное критическое пороговое значение разности (Ds).
5. Способ по п. 1, который дополнительно содержит следующие этапы, на которых:
- на основе упомянутого реального значения упомянутого, по меньшей мере, одного рабочего параметра определяют, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется рабочее состояние, создающее напряжение для насосного средства, что является справедливым, когда коэффициент нагрузки электродвигателя (7) превышает уровень, создающий напряжение для насосного средства, и
- выполняют переключение состояния из активного состояния насоса (2) в состояние очистки насоса (2), если инициируется состояние напряженной работы в насосном средстве.
6. Способ по п. 5, в котором этап определения, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется состояние напряженной работы в насосном средстве, содержит следующий этап, на котором:
- определяют, равно или превышает упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра заданное пороговое значение (GA) напряжения во время заданного первого периода времени (T1).
7. Способ по п. 5, в котором этап определения, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется состояние напряженной работы для насосного средства, содержит следующий этап, на котором:
- определяют, находится ли упомянутое реальное значение упомянутого, по меньшей мере, одного рабочего параметра за пределами заданного интервала (RA) состояния напряженной работы в течение заданного первого периода времени (T1).
8. Способ по п. 5, в котором этап определения, воздействует ли внешняя сила на электродвигатель (7) в такой степени, что инициируется состояние напряженной работы насосного средства, содержит следующий этап, на котором:
- определяют, равна или превышает разность между упомянутым реальным значением и заданным номинальным значением, когда насос (2) находится в активном состоянии, заданное пороговое значение разности (DA) напряжений в течение заданного первого периода времени (T1).
9. Способ по п. 6, в котором критическое пороговое значение (Gs) для упомянутого, по меньшей мере, одного рабочего параметра, по меньшей мере, на 20% больше, чем пороговое значение (GA), создающее напряжение упомянутого, по меньшей мере, одного рабочего параметра.
10. Способ по п. 7, в котором критический интервал (RS) для упомянутого, по меньшей мере, одного рабочего параметра больше чем и включает в себя интервал (RA), создающий напряжение для упомянутого, по меньшей мере, одного рабочего параметра.
11. Способ по п. 8, в котором критическое пороговое значение (Ds) разности для упомянутого, по меньшей мере, одного рабочего параметра в, по меньшей мере, два раза больше, чем пороговое значение (Da) разности, создающее напряжение упомянутого, по меньшей мере, одного рабочего параметра.
12. Способ по любому из предыдущих пунктов дополнительно содержит следующий этап, на котором:
- выполняют переключение состояния из активного состояния насоса (2) в состояние очистки насоса (2), если электродвигатель (7) последовательно был приведен в движение в упомянутом первом направлении в течение заданного второго периода времени (Т2).
13. Способ по п. 5, в котором упомянутое переключение состояния из активного состояния насоса (2) в состояние очистки насоса (2) содержит следующий этап, на котором:
- уменьшают скорость вращения электродвигателя (7) в упомянутом первом направлении в соответствии с заданным постепенным снижением скорости вращения электродвигателя (7).
14. Способ по п. 13, который дополнительно содержит следующие этапы, на которых:
- останавливают электродвигатель (7) и
- поддерживают электродвигатель (7) в остановленном состоянии в течение заданного третьего периода времени (Т3).
15. Способ по п. 14, который дополнительно содержит следующие этапы, на которых:
- увеличивают скорость вращения электродвигателя (7) во втором направлении, противоположном первому направлению, в соответствии с заданным постепенным повышением скорости вращения электродвигателя (7),
- выполняют привод электродвигателя (7) в упомянутом втором направлении в течение заданного четвертого периода времени (Т4),
- уменьшают скорость вращения электродвигателя (7) в упомянутом втором направлении в соответствии с упомянутым постепенным снижением скорости вращения электродвигателя (7) и
- останавливают электродвигатель (7).
| УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ | 1992 |
|
RU2025943C1 |
| US 6481973 B1, 19.11.2002 | |||
| US 6254353 B1, 03.07.2001 | |||
| Герметичный насос | 1988 |
|
SU1537894A1 |

