Уровень техники, предшествующий изобретению
Настоящее изобретение относится, в общем, к электродвигателям переменного тока, а более конкретно к системе и способу уменьшения потребления активной мощности разомкнутых систем привода электродвигателя переменного тока (которые могут включать в себя по меньшей мере привод электродвигателя, электродвигатель и присоединенную нагрузку).
Разомкнутые приводы электродвигателя переменного тока обычно запрограммированы таким образом, чтобы функционировать на основе рабочей характеристики "напряжение/частота" (В/Гц). Поскольку настройки характеристики "В/Гц" разомкнутого привода электродвигателя обычно регулируются только в то время, когда привод не функционирует и/или фактические условия нагрузки электродвигателя не известны во время ввода привода в эксплуатацию, рабочая характеристика "В/Гц" обычно представляет собой предварительно заданную и статическую характеристику, которая программируется во время начального монтажа и настройки привода. Электропривод может быть запрограммирован имеющим рабочую характеристику "В/Гц" первого порядка или линейную для того, чтобы поддерживать постоянное соотношение между напряжением и частотой, прикладываемыми к электродвигателю. Такого рода рабочая характеристика сохраняет постоянный магнитный поток в воздушном зазоре и, следовательно, создает постоянный крутящий момент на электродвигателе. В качестве альтернативы, может быть выбрана характеристика "В/Гц" второго порядка, при которой выходной крутящий момент приблизительно пропорционален квадрату скорости вращения электродвигателя. Некоторые приводы от электродвигателей также предусматривают предварительно задаваемые программируемые пользователем настройки "В/Гц", удовлетворяющие требованию специальных вариантов применения. Будучи запрограммирован, привод электродвигателя обычно функционирует на основе этой предварительно заданной рабочей характеристики в течение срока службы привода, если только оператор позже не изменит настройку привода.
Некоторые приводы сегодня имеют возможности по энергосбережению, такие как "Минимизации магнитного потока" или "Оптимизация магнитного потока". Эти возможности часто спроектированы таким образом, чтобы динамически осуществлять поиск минимального тока или магнитного потока в электродвигателе, но не полной входной мощности электродвигателя. Для этих возможностей обычно выбирается напряжение на электродвигателе, которое находится между линейной настройкой характеристики "В/Гц" и квадратичной настройкой характеристики "В/Гц".
Как правило, линейная характеристика "В/Гц", обычно именуемая как постоянная характеристика "В/Гц", является настройкой по умолчанию большей части разомкнутых приводов электродвигателей. В то время как настройки линейной характеристика "В/Гц" для некоторого данного привода электродвигателя обычно программируются таким образом, чтобы обеспечивать нагрузке постоянный крутящий момент, такой постоянный выходной крутящий момента не нужен для многих вариантов применения с переменным крутящим моментом. Следовательно, эти настройки характеристики "В/Гц" часто имеют своим результатом бесполезно израсходованную энергию и неэффективное функционирование системы привода электродвигателя, в частности электродвигателя и присоединенной к нему нагрузки.
Кроме того, по причине того, что эта характеристика "В/Гц" является статической, привод электродвигателя функционирует независимо от любых изменений в рабочих условиях. Хотя некоторые приводы электродвигателя могут позволить пользователю изменять характеристику "В/Гц", например, устанавливая точки начала, середины и/или конца характеристики "В/Гц", такое программирование не может быть выполнено автоматически самим приводом и может быть завершено только при отключенном электродвигателе. Это обычно требует квалифицированного технического специалиста, который полностью разбирается как в приводе электродвигателя, так и в профиле нагружения конкретного применения электродвигателя и нагрузки.
Другая причина, по которой оператор, вводящий привод в эксплуатацию, обычно выбирает линейную характеристику "В/Гц", заключается в том, что линейная характеристика "В/Гц" обеспечивает постоянный крутящий момент и минимизирует риск того, что фактический крутящий момент при использовании нелинейной характеристики "В/Гц" (например, характеристики второго порядка) может быть недостаточным для того, чтобы удовлетворить потребность крутящем моменте нагрузки для вариантов применения с переменным крутящим моментом. Это особенно истинно в том случае, если оператор, вводящий привод в эксплуатацию, полностью не понимает профиль нагрузки в том варианте применения электродвигателя, для которого установлен привод. Например, на установках обработки сточных вод электродвигатели насосов часто спроектированы таким образом, чтобы удовлетворять пиковую потребность в случае, когда летом идет проливной дождь. Однако в течение большей части года процент нагрузки электродвигателя насоса может быть очень низким. Использование характеристики "В/Гц" второго порядка в этом варианте применения может быть рискованным по той причине, что характеристика "В/Гц" второго порядка может не обеспечить достаточного крутящего момента в случае, когда имеет место событие проливного дождя. Кроме того, оператор, который вводит привод в эксплуатацию, обычно не является тем специалистом на предприятии, который ответственен за мониторинг и контроль в области энергосбережения. Таким образом, у оператора, который вводит привод в эксплуатацию, может не быть большого стимула выбирать другую настройку характеристики "В/Гц" для энергосбережения по отношению к стандартной настройке линейной характеристики "В/Гц".
Следовательно, было бы желательно разработать аппарат и способ осуществления динамического регулирования рабочей характеристики "В/Гц" разомкнутого привода электродвигателя переменного тока во время функционирования электродвигателя так, чтобы сам привод мог определять оптимальное напряжение и частоту, прикладываемые к электродвигателю, с целью минимизации входной активной мощности электродвигателя и достижения дополнительного энергосбережения, сохраняя при этом условия стабильного функционирования электродвигателя.
Краткое описание изобретения
Настоящее изобретение предусматривает систему и способ для управления приводом электродвигателя переменного тока, соединенным с нагрузкой, которые преодолевают вышеупомянутые недостатки.
В соответствии с одним аспектом изобретения система управления запрограммирована таким образом, чтобы вводить в привод электродвигателя переменного тока начальную команду "напряжение-частота", основанную на начальной характеристике "напряжение/герц" ("В/Гц"), принимать вывод данных в реальном масштабе времени из привода электродвигателя переменного тока, генерируемых в соответствии с этой начальной командой "напряжение-частота", и передавать в обратном направлении приводу электродвигателя переменного тока множество измененных команд "напряжение-частота", причем каждая команда из этого множества измененных команд "напряжение-частота" содержит отклонение от начальной характеристики "В/Гц". Система управления также запрограммирована таким образом, чтобы определять в реальном масштабе времени значение параметра электродвигателя, соответствующее каждой команде из этого множества измененных команд "напряжение-частота" и передавать в обратном направлении приводу электродвигателя переменного тока измененную команду "напряжение-частота", так чтобы это определяемое в реальном масштабе времени значение параметра электродвигателя находилось в пределах некоторой области допустимых значений параметра электродвигателя.
В соответствии с другим аспектом изобретения способ для управления выходом привода электродвигателя включает в себя этапы, на которых: управляют приводом электродвигателя в соответствии со статическим графиком "напряжение-частота", создавая выходную мощность, и определяют значение некоторого указанного параметра электродвигателя, соответствующее статическому графику "напряжение-частота". Способ также включает в себя этапы, на которых: определяют область допустимых значений указанного параметра электродвигателя, выборочно изменяют статический график "напряжение-частота" во время функционирования привода электродвигателя, создавая пониженную входную мощность электродвигателя, и управляют приводом электродвигателя при настройке "напряжение-частота", соответствующей значению указанного параметра в пределах области допустимых значений.
В соответствии с еще одним другим аспектом изобретения привод электродвигателя сконфигурирован таким образом, чтобы подавать мощность на нагрузку. Привод электродвигателя включает в себя инвертор, предназначенный для того, чтобы подавать мощность на нагрузку, и контроллер, операционно с ним соединенный таким образом, чтобы управлять функционированием инвертора. Контроллер сконфигурирован таким образом, чтобы заставлять инвертор регулировать настройку "напряжение-частота" во время функционирования привода электродвигателя для того, чтобы заставлять инвертор функционировать в соответствии с каждой из множества варьированных настроек "напряжение-частота" и контролировать в реальном масштабе времени значение параметра электродвигателя, соответствующее каждой настройке "напряжение-частота". Контроллер также сконфигурирован таким образом, чтобы устанавливать область допустимых значений для этого параметра электродвигателя и заставлять инвертор функционировать в соответствии с такой настройкой "напряжение-частота", при которой параметр электродвигателя находится в пределах области допустимых значений.
Другие разнообразные признаки и преимущества настоящего изобретения станут очевидны из нижеследующих подробного описания и чертежей.
Краткое описание чертежей
Чертежи иллюстрируют предпочтительные варианты реализации, предусматриваемые в настоящее время для осуществления изобретения.
На чертежах:
Фиг.1 представляет собой схему системы управления, включающей в себя систему привода электродвигателя, соответствующую одному аспекту изобретения.
Фиг.2 представляет собой схему системы управления, включающей в себя систему привода электродвигателя, соответствующую другому аспекту изобретения.
Фиг.3 представляет собой схему системы управления, включающей в себя систему привода электродвигателя, соответствующую еще одному другому аспекту изобретения.
Фиг.4 представляет собой блок-схему алгоритма, изображающую приводимые в качестве примера этапы способа управления приводом электродвигателя, которые могут быть реализованы в любой из систем привода электродвигателя, показанных на фигурах 1-3, соответствующих вариантам реализации изобретения.
Фиг.5 представляет собой ряд приводимых в качестве примера графиков параметров электродвигателя, определяемых в реальном масштабе времени, для способа управления приводом электродвигателя, показанного на Фиг.4.
Фиг.6 представляет собой приводимый в качестве примера график, иллюстрирующий энергосбережение для некоторого заданного привода электродвигателя, управляемого в соответствии со способом управления приводом электродвигателя, показанным на Фиг.4, соответствующим варианту реализации изобретения.
Фиг.7 представляет собой приводимый в качестве примера график, иллюстрирующий энергосбережение для некоторого заданного привода электродвигателя, управляемого в соответствии со способом управления приводом электродвигателя, показанным на Фиг.4, соответствующим варианту реализации изобретения.
Фигуры 8-10 представляют собой ряд приводимых в качестве примера графиков, иллюстрирующих сравнение ряда способов управления приводом электродвигателя.
Подробное описание изобретения
Предложено несколько вариантов реализации изобретения, которые относятся к системе и способу управления приводом электродвигателя переменного тока, соединенным с нагрузкой, которые преодолевают вышеупомянутые недостатки. Эти варианты реализации изобретения относятся к оптимизирующей энергию системе управления для разомкнутых приводов электродвигателей, охватывая множество конструкций и схем управления.
Общая схема системы (10) привода электродвигателя и связанного с ней привода (12) электродвигателя переменного тока показана на Фиг.1. Привод (12) электродвигателя может быть сконфигурирован, например, как привод с регулируемой скоростью, спроектированный таким образом, чтобы получать трехфазную подводимую мощность (14а)-(14с) переменного тока, выпрямлять подводимый переменный ток и выполнять преобразование постоянного тока в переменный ток для выпрямленной части, преобразуя ее в трехфазное переменное напряжение переменной частоты и амплитуды, которое подается на нагрузку. В соответствии с одним вариантом реализации изобретения в привод (12) электродвигателя может быть интегрировано звено (16) управления приводом, который функционирует как часть внутренней логики привода (12) электродвигателя. В качестве альтернативы, звено (16) управления приводом может быть реализовано во внешнем модуле, отличном от привода (12) электродвигателя, и принимать от него данные (например, сигналы напряжения и/или тока), как это более подробно описано в отношении фигур 2 и 3.
Обратимся к Фиг.1, где в приводимом в качестве примера варианте реализации изобретения привод (12) электродвигателя включает в себя звено (18) силового блока привода, которое может, например, содержать неуправляемое или управляемое выпрямляющее звено (20) (преобразует нерегулируемый переменный ток в постоянный ток), фильтрующую катушку (22) индуктивности, конденсатор (24) шины постоянного тока, и инвертор (26) на основе широтно-импульсной модуляции (ШИМ-инвертор) (преобразует постоянный ток в регулируемый переменный ток). В качестве альтернативы, звено (18) силового блока привода может быть предусмотрено без такого рода выпрямляющего звена таким образом, чтобы шина постоянного тока была напрямую соединена с инвертором. Звено силового блока привода может быть предусмотрено без выпрямляющего звена в том случае, когда, например, применяется с источником бесперебойного питания (UPS-источником).
Привод (12) электродвигателя принимает трехфазный подводимый переменный ток (14а)-(14с), который подается в выпрямляющее звено (20). Выпрямляющее звено (20) преобразует подводимую мощность переменного тока в постоянный ток таким образом, что между выпрямляющим звеном (20) и ШИМ-инвертором (26) имеется напряжение на шине постоянного тока и ШИМ-инвертор (26) инвертирует, приводя к заданным параметрам, мощность постоянного тока в мощность регулируемого переменного тока для передачи на электродвигатель (28) переменного тока. ШИМ-инвертор (26) включает в себя множество переключателей (не показанных на чертеже) и сконфигурирован таким образом, чтобы функционировать в соответствии со схемой ШИМ-управления, такой как, например, схема управления пространственно-векторной модуляцией (SVM) или схема управления синусоидально-триангулярной ШИМ, управляя этим множеством переключателей таким образом, чтобы тем самым создавать управляемую выходную мощность переменного тока. В соответствии с приводимым в качестве примера вариантом реализации изобретения ШИМ-инвертор (26) сконфигурирован таким образом, чтобы функционировать в соответствии со схемой SVM-управления.
Звено (16) управления приводом функционирует таким образом, чтобы формировать схему SVM-управления для ШИМ-инвертора (26). Если описать это более конкретно, то схема SVM-управления для ШИМ-инвертора (26) формируется системой (10) привода электродвигателя на основе настройки или команды "напряжение-частота" (В/Гц) (то есть на основе графика или характеристики В/Гц), используемой для управления приводом (12) электродвигателя. В соответствии с приводимым в качестве примера вариантом реализации изобретения, система (10) привода электродвигателя запрограммирована таким образом, чтобы осуществлять динамическое регулирования напряжения и частоты, подаваемых на электродвигатель (28), на основе потребности электродвигателя или нагрузки, что на самом деле динамически регулирует форму или профиль предварительно заданной характеристики "В/Гц" (и связанную с ней схему SVM-управления), внутренней по отношению к приводу (12) электродвигателя.
Кроме того, привод (12) электродвигателя включает в себя пользовательский интерфейс (30) привода или панель управления приводом, сконфигурированные таким образом, чтобы осуществлять ввод параметров (32) электродвигателя и вывод опорной частоты (34), ускоряющее напряжение (36), которое используется для создания пускового крутящего момента, для ускорения электродвигателя с нулевой скорости, и информацию технического паспорта (NPI) (38) электродвигателя. Пользовательский интерфейс (30) также используется для того, чтобы отображать для пользователя в контрольных целях перечень рабочих параметров электродвигателя, таких как, например, выходное напряжение на электродвигателе (действующее значение), ток в электродвигателе (действующее значение), входная мощность на электродвигателе, скорость, крутящий момент и т.д.
Как показано на Фиг.1, звено (16) управления приводом включает в себя модуль (40) алгоритма управления, существующую или предварительно заданную характеристику (42) "В/Гц", генератор (44) сигналов для генерирования сигналов SVM-управления и вычислитель (46) параметров электродвигателя. Звено (16) управления приводом функционирует таким образом, чтобы принимать выходные данные из звена (18) силового блока привода, определять и контролировать параметр(ы) электродвигателя и, основываясь на определенных таким образом параметре (параметрах) электродвигателя, определять оптимальные напряжение и частоту для того, чтобы сформировать схему SVM-управления для управления приводом (12) электродвигателя.
В соответствии с одним вариантом реализации изобретения звено (16) управления приводом принимает из звена (18) силового блока привода сигнал (48) напряжения на шине постоянного тока и сигналы (50) входного тока электродвигателя. Используя сигнал (48) напряжения на шине постоянного тока и переключающие ШИМ-сигналы (56), рассчитывают входные напряжения электродвигателя. Сигналы (50) и сигналы входного напряжения электродвигателя могут быть получены из выходной мощности переменного тока привода (12) электродвигателя, например, посредством проводных или беспроводных датчиков, которые передают сигналы (48) напряжения в режиме реального времени и сигналы (50) тока в регионе реального времени. В качестве альтернативы, вычислитель (46) параметров электродвигателя может принимать сигналы, указывающие скорость вращения электродвигателя от датчика скорости или устройства оценки скорости, интегрированного в привод (12) электродвигателя. Звено (16) управления приводом может также принимать сигнал (36) ускоряющего напряжения, который используется для того, чтобы создавать пусковой крутящий момент для ускорения электродвигателя (28) переменного тока с нулевой скорости и опорный сигнал (52) скорости. Основываясь на принятых сигналах (36), (48), (50), звено (16) управления приводом передает ряд переключающих сигналов или переключающих команд (54) ШИМ-инвертору (26), формируя, таким образом, схему SVM-управления.
При функционировании звено (16) управления приводом, входящее в состав системы (10) привода электродвигателя, после пуска или возврата к стандартной настройке привода (12) электродвигателя функционирует в режиме/настройке по умолчанию. Функционируя с настройкой по умолчанию, звено (16) управления приводом контролирует сигнал (48) напряжения на шине постоянного тока и сигналы (50) тока от датчиков, основываясь на сигнале (48) напряжения на шине постоянного тока и сигналах (50) тока, определяет рабочую точку в блоке (42) существующей характеристики "В/Гц" и передает ШИМ-инвертору (26) переключающие команды для режима по умолчанию, основанные на этой предварительно установленной рабочей точке. В соответствии с одним вариантом реализации изобретения звено (16) управления приводом принимает команду частоты (или скорости) от устройства ввода (не показанного на чертеже), генерируя команду частоты и команду величины напряжения. Команда величины напряжения задается функцией команды частоты, обычно именуемой как характеристика "В/Гц". Звено (16) управления приводом генерирует команду трехфазного напряжения, основанную на команде частоты, используемую для того, чтобы управлять переключением матрицы переключателей в инверторе (26) на основе широтно-импульсной модуляции. В частности, генератор (44) сигналов принимает команду (56)напряжения и команду (58) частоты из существующей характеристики (42) "В/Гц" и генерирует шесть сигналов широтно-импульсной модуляции, управляющих шестью соответствующими переключателями в инвертор (26) на основе широтно-импульсной модуляции. Другими словами, система (10) привода электродвигателя передает команды "частоты-напряжения", соответствующие статическому предварительно заданному графику "В/Гц" в режиме по умолчанию.
После первоначального функционирования в режиме по умолчанию звено (16) управления приводом затем переходит к функционированию в режиме оптимизации энергопотребления, при котором модуль (40) алгоритма управления шунтирует блока (42) существующей характеристики "В/Гц" и принимает в качестве входных данных опорную частоту (34), сигнал (36) ускоряющего напряжения и информацию (38) технического паспорта, поступающие от пользовательского интерфейса (30) привода. Модуль (40) алгоритма управления также принимает оцененные или вычисленные параметры (60) электродвигателя от вычислителя (46) параметров. В режиме оптимизации энергопотребления модуль (40) алгоритма управления использует принятые сигнал (48) напряжения на шине постоянного тока и/или сигналы (50) тока и информацию (38) технического паспорта для того, чтобы рассчитать или оценить выбранные опорные определяемые в реальном масштабе времени параметры электродвигателя. В одном варианте реализации изобретения определяемые в реальном масштабе времени параметры электродвигателя могут представлять собой среднее действующее значение напряжения на электродвигателе, среднее действующее значение тока в электродвигателе, мгновенное значение коэффициента входной мощности электродвигателя, коэффициент полезного действия электродвигателя или скольжение ротора электродвигателя (или скорость). После этого модуль (40) алгоритма управления определяет то, достигнуто ли состояние оптимального функционирования, определяя, достиг ли какой-либо из этих определенных в реальном масштабе времени параметров электродвигателя своей предварительно заданной области допустимых значений, как это более подробно описано в отношении Фиг.4. Если состояние оптимального функционирования не достигнуто, то алгоритм регулирует команду напряжения с постоянным или переменным шагом и сохраняет ту же самую команду частоты. В ином случае алгоритм сохраняет ту же самую команду напряжения и частоты до тех пор, пока не обнаружена новая опорная частота или не обнаружен нежелательный режим функционирования или не обнаружено неустойчивое функционирование электродвигателя. Модуль (40) алгоритма управления передает определенную таким образом команду (62) напряжения и команду (64) частот генератору (44) сигналов. Используя команды (62), (64) напряжения и частоты, принятые от модуля (40) алгоритма управления, генератор (44) сигналов передает переключающий сигнал (54) в звено (18) силового блока привода. В ответ на это звено (18) силового блока привода синтезирует формы сигнала напряжения переменного тока с постоянной частотой и амплитудой для выдачи на электродвигатель (28) переменного тока.
В режиме оптимизации энергопотребления звено (16) управления приводом сконфигурировано таким образом, чтобы непрерывно осуществлять мониторинг системы (10) привода электродвигателя и передавать последовательность измененных переключающих команд (54) инвертору (26) на основе широтно-импульсной модуляции. В частности, звено (16) управления приводом рассчитывает входные напряжения на электродвигателе, используя сигнал (48) напряжения на шине постоянного тока и переключающие сигналы (56) широтно-импульсной модуляции, и принимает сигналы (50) тока, поступающие от датчиков. Звено (16) управления приводом рассчитывает или оценивает один или более параметров электродвигателя в реальном масштабе времени исходя из рассчитанных входных напряжений на электродвигателе, сигналов (50) тока и информации (38) технического паспорта. Модуль (40) управления также определяет то, обнаружены ли неустойчивость системы, резкое изменение нагрузки или нежелательный режим функционирования, как это подробно описывается ниже. Вслед за этим модуль (40) управления, основываясь на одном или более определенных в реальном масштабе времени параметрах электродвигателя, определяет, то было ли достигнуто состояние оптимального функционирования. Если модуль (40) управления не обнаруживает состояние оптимального функционирования, неустойчивость системы, резкое изменение нагрузки или нежелательный режим функционирования, то модуль (40) управления в таком случае генерирует увеличенную (или уменьшенную) команду (64) частоты и/или увеличенную (или уменьшенную) команду (62) напряжения в течение каждого периода исполнения и посылает увеличенные команды (62), (64) "частоты-напряжения" генератору (44) сигналов. Например, модуль (40) управления может увеличивать (или уменьшать) только одну команду (62), (64), например, команду (64) частоты, сохраняя в то самое время предыдущую команду (62) напряжения, и передавать генератору (44) сигналов увеличенную команду (64) частоты и неувеличенную команду (62) напряжения. В качестве альтернативы, модуль (40) управления может увеличивать (или уменьшать) как команду (64) частоты, так и команду (62) напряжения и передавать генератору (44) сигналов обе увеличенные команды (62), (64). Используя увеличенную (или уменьшенную) команды "напряжение-частота", генератор (44) изменяет переключающие команды (54), передаваемые инвертору (26) на основе широтно-импульсной модуляции таким образом, чтобы входная активная мощность на электродвигателе (28) переменного тока в режиме оптимизации энергопотребления была ниже, чем входная активная мощность при использовании первоначальной статической настройки характеристики "В/Гц" в режиме по умолчанию.
В соответствии с одним приводимым в качестве примера вариантом реализации изобретения предварительно заданная область допустимых значений опорного параметра электродвигателя определяется как некоторая малая зона вокруг предварительно заданного значения, как, например, его максимального и минимального значения, его расчетного или номинального значения или любого конкретного значения, определенного пользователем. Осуществляется мониторинг тенденции этого определенного в реальном масштабе времени параметра электродвигателя для того, чтобы определить, попадает ли значение в реальном масштабе времени этого опорного параметра электродвигателя в рамки его предварительно заданной области допустимых значений, например, если значение в реальном масштабе времени этого параметра электродвигателя находится достаточно близко к его максимальному или минимальному значению. Если согласно алгоритму определено, что параметр электродвигателя находится в пределах его области допустимых значений, то в таком случае достигнуто ли состояние оптимального функционирования. Согласно алгоритму те же самые команды напряжения и частоты сохраняются до тех пор, пока не будут обнаружены новая опорная частота или неустойчивое функционирование электродвигателя или нежелательный режим функционирования. В соответствии с этой оптимально поддерживаемой командой "напряжение-частота" генератор (44) сигналов заставляют генерировать соответствующие переключающие команды (54) (то есть команду управления SVM-модуляцией), заставляющие привод электродвигателя функционировать в точке оптимального функционирования, в которой активная входная мощность на электродвигателе (28) переменного тока используется наиболее эффективным образом.
В режиме оптимизации энергопотребления звено (16) управления приводом также сконфигурировано таким образом, чтобы непрерывно осуществлять мониторинг на резкое изменение нагрузки, неустойчивость системы и/или нежелательный режим функционирования. Если неустойчивость системы и/или нежелательный режим функционирования подтверждены, то звено (16) управления приводом передает инвертору (26) на основе широтно-импульсной модуляции последовательность измененных переключающих команд (54). Во время режима оптимизации энергопотребления система могла стать неустойчивой вследствие, например, резких изменений нагрузки или в случае, если скольжение ротора электродвигателя (или скорость) выходит за пределы некоторого пограничного значения скольжения (или скорости). Состояние неустойчивости системы может быть определено посредством мониторинга на резкие изменения значения или скорости изменения сигналов тока электродвигателя, коэффициента мощности или скорости (или скольжения ротора) или посредством мониторинга тенденции определяемого в реальном масштабе времени параметра (параметров) электродвигателя, как это будет подробно рассмотрено ниже. Сравнивая определенный в реальном масштабе времени параметр (параметры) электродвигателя и установленную тенденцию определяемого в реальном масштабе времени параметра (параметров) электродвигателя с их предварительно заданными пограничными значениями, модуль (40) управления определяет, обнаружены ли неустойчивость системы или нежелательный режим функционирования. Если такая неустойчивость системы или нежелательный режим функционирования обнаружены, то модуль (40) управления может передать генератору (44) сигналов измененные команды "напряжение-частота" для того, чтобы попытаться восстановить устойчивость системы. В качестве альтернативы, модуль (40) управления может войти в "процедуру возврата к стандартной настройке" для того, чтобы возвратить управление приводом электродвигателя в режим "по умолчанию" в пределах одного или более периодов исполнения и увеличить (или уменьшить) команду (62) напряжения до первоначальной предварительно заданной характеристики "В/Гц" или линейной характеристики "В/Гц", передавая при этом генератору (44) сигналов ту же самую команду (64) частоты, для того, чтобы восстанавливать и сохранять устойчивость системы до тех пор, пока рабочая точка нагрузки не будет считаться устойчивой. В соответствии с одним вариантом реализации изобретения команда (64) частоты может удерживаться постоянной до тех пор, пока пользователь или внешний контроллер процесса не потребует изменения опорной частоты (34).
Звено (16) управления приводом может также осуществлять мониторинг определяемых в реальном масштабе времени параметров электродвигателя для граничных условий, специализированных по варианту применения, которые могут быть предварительно заданы оператором для указания состояния системы реального времени, которое (состояние) может не указывать неустойчивое или нежелательное состояние системы, но, тем не менее, быть нежелательным для этого конкретного варианта применения. Например, звено (16) управления приводом может осуществлять мониторинг минимального пограничного значения напряжения, максимального пограничного значения напряжения, максимального пограничного значения тока, максимального пограничного значения скольжения (минимального пограничного значения скорости), минимального пограничного значения коэффициента мощности, максимального пограничного значения крутящего момента или максимального пограничного значения температуры электродвигателя.
Однако во время режима оптимизации энергопотребления уменьшенная команда напряжения может вызвать уменьшение скорости вращения электродвигателя. По этой причине звено (16) управления приводом может быть дополнительно запрограммировано таким образом, чтобы осуществлять мониторинг скорости вращения электродвигателя и увеличивать команду (64) частоты таким образом, чтобы электродвигатель функционировал с требуемой скоростью, функционируя при этом в режиме оптимизации энергопотребления, в соответствии с "режимом компенсации скольжения" таким образом, что скорость вала электродвигателя поддерживается постоянной на синхронной скорости вращения для опорной частоты fref (34). Полезно, что характеристика "В/Гц" (будь то линейная, квадратичная или другие аналогичные настройки (например, настройка с минимизацией магнитного потока)) может, соответственно, быть отрегулирована таким образом, чтобы оптимизировать отношение "В/Гц", так чтобы электродвигатель развивал минимальный крутящий момент, удовлетворяющий потребность крутящего момента нагрузки, в отличие от предварительно заданной характеристики "В/Гц", при которой развиваемый крутящий момент является постоянным.
Принимая, что фактическая основная частота (f1) электродвигателя точно соответствует команде (fcmd) (64) частоты привода (то есть f1=fcmd), синхронная скорость (ωsyn) вращения электродвигателя может быть рассчитана в соответствии со следующей формулой:

где р представляет собой количество полюсов электродвигателя (28). Как показано на Фиг.6, вследствие фактического условия нагружения на нагрузке (то есть формы кривой нагрузочной характеристики) фактическая скорость (ωr) вращения вала электродвигателя в случае, когда команда (64) частоты привода составляет fcmd (таким образом, основная частота электродвигателя составляет f1=fcmd), всегда немного ниже, чем синхронная скорость (ωsyn) вращения. Процентная разность между синхронной скоростью (ωsyn) вращения и скоростью вала электродвигателя определяется в соответствии со следующей формулой:

где s представляет собой скольжение ротора электродвигателя. Следовательно, для того чтобы компенсировать падение скорости вследствие нагрузки, команда (64) частоты привода может быть задана немного более высокой, чем опорная частота (34), так чтобы фактическая скорость вращения вала электродвигателя была равна синхронной скорости вращения первоначальной опорной частоты (34). Это и составляет "режим компенсации скольжения".
Режим "компенсации скольжения" может быть использован тогда, когда пользователь или расположенный во внешнем контуре контроллер привода ожидает, что скорость вращения вала электродвигателя будет соответствовать синхронной скорости вращения для опорной частоты (34) (в этом случае опорная частота (34) дается, по существу, как "опорное значение скорости"). Например, для четырехполюсного асинхронного электродвигателя, когда пользователь на пользовательском интерфейсе привода задает опорную частоту (34) равной 40 Гц, пользователь часто ожидает, что электродвигатель будет функционировать с синхронной скоростью вращения 40 Гц (то есть 2400 оборотов в минуту). Однако если привод пошлет команду (64) частоты, составляющую 40 Гц, то фактическая скорость вращения электродвигателя будет немного ниже, чем 2400 оборотов в минуту, вследствие фактического условия нагружения (в соответствии с Фиг.6), составляя, например, 2375 оборотов в минуту. Используя Уравнение 2, скольжение ротора электродвигателя можно рассчитать как (
По-прежнему рассматривая Фигуру 1, отметим, во время режима оптимизации энергопотребления с блоком (42) существующей характеристики "В/Гц" можно обойтись несколькими способами, соответствующими вариантам реализации изобретения. В соответствии с одним вариантом реализации изобретения модуль (40) алгоритма управления может быть реализован в прикладном программном обеспечении привода, в то время как блок (42) существующей характеристики "В/Гц" может быть реализован в программно-аппаратном обеспечении привода. В таком варианте реализации изобретения блок (42) существующей характеристики "В/Гц" может продолжать вырабатывать команды напряжения и частоты, но такие команды не могут пройти к генератору (44) сигналов. В качестве альтернативы, как модуль (40) алгоритма управления, так и блок (42) существующей характеристики "В/Гц" могут быть реализованы в программно-аппаратном обеспечении привода. В этом случае блок (42) существующей характеристики "В/Гц" может быть заблокирован или удален.
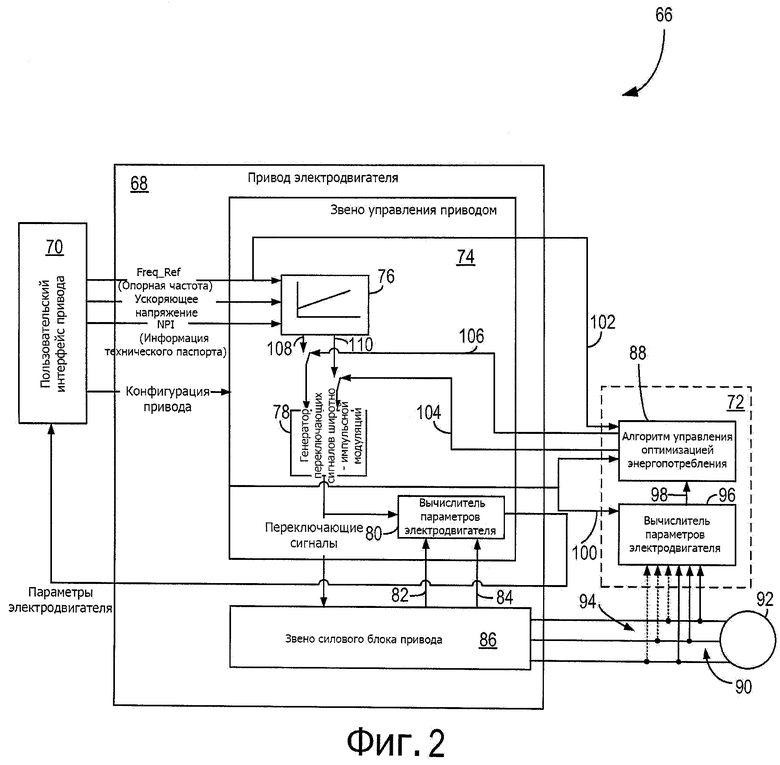
Обратимся теперь к Фиг.2, на которой показана общая структура системы (66) привода электродвигателя, соответствующей одному варианту реализации изобретения. Система (66) привода электродвигателя включает в себя привод (68) электродвигателя переменного тока, пользовательский интерфейс (70) привода и автономный внешний модуль (72) управления. Звено (74) управления приводом, входящее в состав системы (66) привода электродвигателя содержит блок (76) статической характеристики "В/Гц", генератор (78) сигналов и вычислитель (80) параметров электродвигателя, который принимает сигнал (82) напряжения на шине постоянного тока и сигналы (84) тока электродвигателя, поступающие от звена (86) силового блока привода.
Модуль (72) управления включает в себя в качестве отдельного аппаратного модуля, внешнего по отношению к существующим аппаратным средствам привода (68) электродвигателя, модуль (88) алгоритма управления оптимизацией энергопотребления и может быть установлен в существующем приводе электродвигателя и осуществлять обмен данными через существующие каналы связи привода, такие как, например, ModBus, Device Net, Ethernet и тому подобное. Модуль (72) управления использует набор датчиков (90) напряжения для измерения трехфазных линейных напряжений на электродвигателе (92). Модуль (72) управления также включает в себя набор датчиков (94) тока для измерения трех фазных токов на электродвигателе (92). В случае, при котором нейтральная точка недоступна, модуль (72) управления включает в себя, по меньшей мере, два датчика тока для трехпроводной системы. Поскольку эти три фазных тока в сумме дают ноль, третий ток может быть рассчитан исходя из величин двух других токов. Однако хотя третий датчик и является необязательным, такой датчик увеличивает точность всего расчета токов.
Модуль (72) управления также включает в себя внутренний вычислитель (96) параметров электродвигателя, который осуществляет расчет/оценку набора опорных параметров электродвигателя (98), таких как, например, действующее значение напряжения, действующее значение тока, скольжение (или скорость), коэффициент мощности и коэффициент полезного действия, подлежащих вводу в модуль (88) алгоритма управления. Информацию технического паспорта (NPI-информацию) (100) электродвигателя получают от привода (68) электродвигателя по каналам связи, или ее вводит пользователь в модуль (72) управления. Опорная частота (102) также вводится во внешний модуль (72) управления по каналам связи привода.
Аналогично процедуре, описанной со ссылкой на Фиг.1, во время режима оптимизации энергопотребления логика, содержащаяся в модуле (88) алгоритма управления, по существу, заменяет блок (76) статической характеристики "В/Гц". Модуль (88) алгоритма управления принимает в качестве входных данных опорную частоту (102) и информацию (100) технического паспорта, поступающие от привода (68) электродвигателя, так же как и рассчитанные/оцененные опорные параметры (98) электродвигателя, поступающие от вычислителя (96) параметров электродвигателя. Модуль (88), используя эти входные данные, генерирует команду (104) частоты и команду (106) напряжения, и модуль (72) управления посылают эти команды (104), (106) генератору (78) сигналов.
В соответствии с этим вариантом реализации изобретения, поскольку модуль (88) алгоритма управления располагается внешним образом по отношению к приводу (68) электродвигателя, блок (76) статической характеристики "В/Гц" может быть сохранен таким, как есть, вырабатывая набор предварительно заданных команд (108) напряжения и команд (110) частоты. Однако эти предварительно заданные команды (108), (110) не проходят к генератору (78) сигналов.
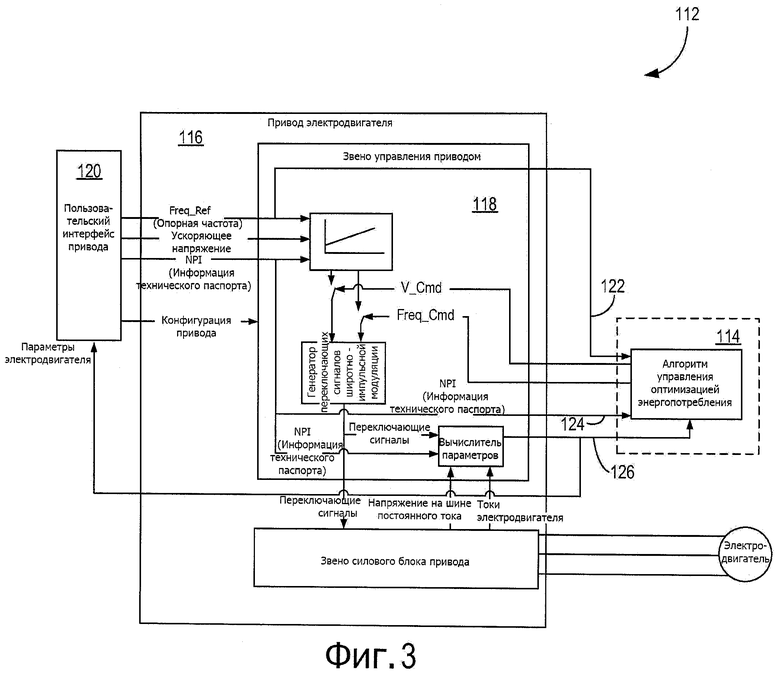
[0047] На Фиг.3 проиллюстрирована система (112) привода электродвигателя, включающая в себя внешний модуль (114) управления, соответствующая другому варианту реализации изобретения. Аналогично системе привода электродвигателя, описанной со ссылкой на Фиг.2, система (112) привода электродвигателя включает в себя привод (116) электродвигателя, звено (118) управления приводом и пользовательский интерфейс (120) привода. Однако в отличие от системы привода электродвигателя, показанной на Фиг.2, внешний модуль (114) не имеет своих собственных датчиков напряжения и тока или внутреннего вычислителя параметров электродвигателя. Вместо этого внешний модуль (114) получает данные опорной частоты (122), информацию (124) технического паспорта и рассчитанные и/или оцененные параметры (126) электродвигателя по каналам связи привода. В соответствии с одним вариантом реализации изобретения внешний модуль (114) может быть реализован в гнезде для платы расширения, имеющемся в приводе (116) электродвигателя, наделяя привод (116) электродвигателя функциональными возможностями по оптимизации энергопотребления.
Обратимся теперь к Фиг.4, на которой в соответствии с одним вариантом изобретения изображена осуществляемая контроллером технология (128) оптимизации энергопотребления, предназначенная для динамического управления приводом электродвигателя, таким как привод (12) электродвигателя переменного тока, показанный на Фиг.1. Как будет подробно описано ниже, согласно способу (128) осуществляется динамическое регулирование напряжения и частоты, подаваемых на электродвигатель, на основе потребности электродвигателя или нагрузки, что эффективно регулирует форму или профиль предварительно заданной характеристики "В/Гц", внутренней по отношению к приводу (12) электродвигателя. Согласно способу (128) осуществляется мониторинг значения одного или более параметров электродвигателя до тех пор, пока этот параметр (эти параметры) электродвигателя не попадут в пределы некоторой предварительно заданной области допустимых значений. При регулировании напряжения и частоты способ (128) также осуществляет мониторинг на резкие изменения нагрузки или неустойчивости функционирования электродвигателя или нежелательные режимы функционирования, которые могут свидетельствовать о возможном отказе электродвигателя или о нежелательном режиме функционирования электродвигателя.
Способ (128) начинается на ЭТАПЕ 130 при получении параметров (NPI) технического паспорта электродвигателя, таких как, например, номинальная мощность в л.с. (HP), сила тока при полной нагрузке (FLA), номинальное напряжение, номинальная скорость вращения (обороты в минуту), номинальная частота (Гц), коэффициент номинальной мощности и номинальный коэффициент полезного действия. На ЭТАПЕ 130 также получают параметры пользовательской конфигурации, которые могут включать в себя, например, заданный процент от силы тока при полной нагрузке, определенную пользователем границу скольжения. На ЭТАПЕ 132 согласно способу (128) определяется набор пограничных значений для выбранных опорных параметров электродвигателя, включающих в себя, например, напряжение, ток, скорость (проскальзывание), коэффициент мощности и коэффициент полезного действия. Например, граничное условие напряжения, V_bound, может быть определено как процент от квадратичной характеристики "В/Гц" (например, 80%); пограничное значение тока, I_bound, может быть определено как процент от силы тока при полной нагрузке; пограничное значение скольжения, s_bound, может быть определено таким образом, чтобы соответствовать номинальному скольжению на номинальной частоте или определяться пользователем; а максимальное изменение тока, delta_I_bound, может быть определено как процент от силы тока при полной нагрузке (например, 20%).
На этапе 134 для выбранных параметров электродвигателя определяется набор областей допустимых значений для определения оптимального состояния функционирования. Такие области допустимых значений могут включать в себя, например, область допустимых значений напряжения, область допустимых значений тока, область допустимых значений скорости (скольжения), область допустимых значений коэффициента мощности, и/или область допустимых значений коэффициента полезного действия. В соответствии с вариантом реализации изобретения область допустимых значений может быть определена на основе определенного граничного условия в соответствии со следующей формулой:

где х представляет выбранный выраженный в процентах диапазон. Используя Уравнение 1, область допустимых значений напряжения может быть определена, например, как V_tol_zone=[100%-105%]*V_bound. Аналогичным образом, область допустимых значений тока I_tol_zone и область допустимых значений скольжения, s_tol_zone, могут быть соответственно определены как I_tol_zone=[95%-100%]*I_bound и s_tol_zone=[95%-100%]*s_bound.
На этапе 136 согласно способу (128) генератору команд подается первоначальный, задаваемый по умолчанию или пусковой набор команд "напряжение-частота". Задаваемый по умолчанию или пусковой набор команд "напряжение-частота" может быть, например, основан на командах "напряжение-частота" предварительно заданной или статической характеристики "В/Гц" или сохраненных в памяти командах "напряжение-частота" от предыдущего успешного события пуска.
Согласно способу (128) на ЭТАПЕ 138 от пользователя или от относящегося к процессу внешнего контура контроллера привода электродвигателя получают опорную частоту. На этапе 140 согласно способу (128) определяют то, является ли изменение опорной частоты достаточно существенным для того, чтобы управление приводом реагировало на него. В частности, согласно способу (128) можно сравнивать текущую опорную частоту с предшествующим значением опорной частоты, определяя то, идентична ли текущая опорная частота предшествующей опорной частоте. В качестве альтернативы, согласно способу (128) можно определять то, превышает ли разность между этими двумя значениями некоторое предварительно заданное допустимое значение (например, 0,1 Гц). Если опорная частота изменена (или изменение больше, чем это предварительно заданное допустимое значение) (142), то согласно способу (128) на этапе 144 в качестве команд частоты и настройки применяется новая опорная частота и новое напряжение из первоначальной настройки "В/Гц", линейной настройки "В/Гц", или другое предварительно заданное значение/настройка с этой частотой. В качестве альтернативы, если опорная частота изменилась на небольшую величину (например, <0,1 Гц), команда напряжения может остаться неизменной при изменении команды частоты. После этого согласно способу (128) осуществляется переход на этап 146 и осуществляется расчет или оценка одного или более определяемых в реальном масштабе времени параметров электродвигателя, которые могут соответствовать, например, напряжению на электродвигателе, току в электродвигателе, скорости вращения электродвигателя, коэффициенту мощности электродвигателя и/или коэффициенту полезного действия электродвигателя.
Обратимся вновь к ЭТАПУ 140, на котором в случае, если опорная частота не изменилась (или изменение меньше, чем некоторое предварительно заданное допустимое значение) (148), то согласно способу (128) осуществляется переход непосредственно на этап (146) и осуществляется расчет или оценка определяемых в реальном масштабе времени параметров электродвигателя с использованием текущего набора команд напряжения и частоты. На этапе 150 согласно способу (128) осуществляется мониторинг на переходное состояние электродвигателя, такого как, например, резкое изменение нагрузки. Если никакого переходного состояния не обнаружено (152), то согласно способу (128) на этапе 154 осуществляется мониторинг на нежелательное состояние функционирования электродвигателя, которое может заключаться, например, в том, что измеренный ток электродвигателя выходит за пределы пограничного значения тока или измеренное напряжение на электродвигателе выходит за пределы пограничного значения напряжения. Если никакого нежелательного состояния функционирования электродвигателя не обнаружено (156), то согласно способу (128) на этапе 158 осуществляется мониторинг на состояние неустойчивого функционирования. Для определения того, имеет ли место состояние неустойчивого функционирования, согласно способу (128) можно проанализировать контролируемые в реальном масштабе времени линейное напряжение и ток, изменение значения между опорным линейным напряжением и/или током и выполняемыми в реальном масштабе времени измерениями линейного напряжения и/или тока, одно или более определяемые в реальном масштабе времени значения параметров электродвигателя и/или тенденцию параметров электродвигателя для определения состояния неустойчивого функционирования. Состояние неустойчивого функционирования может быть обнаружено, например, в том случае, если скольжение ротора (или скорость) электродвигателя выходят за пределы пограничного значения скольжения (или скорости). Кроме того, состояние неустойчивого функционирования может быть отражено резким изменением линейного напряжения или тока, резким изменением параметра электродвигателя, или выходом значения определяемого в реальном масштабе времени параметра электродвигателя, такого как, например, температура электродвигателя, крутящий момент, скольжение, коэффициент мощности или коэффициент полезного действия за пределы некоторого порогового значения.
Если состояние неустойчивого функционирования не обнаружено (160), то согласно способу (128) на этапе 162 определяют то, достигнуто ли состояние оптимального функционирования, определяя то, находится ли любой из выбранных опорных параметров в пределах определенной для него области допустимых значений, как это определено на ЭТАПЕ 136. Если никакой выбранный опорный параметр не находится в пределах определенной для него области допустимых значений (164), то согласно способу (128) на ЭТАПЕ 166 осуществляется регулирование команды напряжения с некоторым постоянным или переменным шагом. Например, согласно способу (128) команда напряжения может быть уменьшена на некоторое предварительно заданное значение импульса, что вызывает передачу инвертору измененного переключающего сигнала. В одном варианте реализации изобретения в способе (128) осуществляется приращение команды напряжения на значение импульса - 10 вольт. Таким образом, измененная команда напряжения на 10 вольт ниже, чем команда напряжения, заданная по умолчанию. В качестве альтернативы, если привод электродвигателя функционирует в точке оптимального функционирования (168) (то есть параметр электродвигателя находится в пределах своей области допустимых значений), то согласно способу (128) сохраняются текущие команда напряжения и команда частоты. На этапе 170 в способе (128) вводится этап ожидания, на котором в способе 128 имеет место ожидание в течение периода исполнения алгоритма перед возвратом на этап (138). После этого согласно способу (128) продолжается выполнение цикла с этапа 138 по 178 с целью мониторинга изменений в состоянии электродвигателя.
Обратимся вновь к этапам 150, 154 и 158, на которых, если согласно способу (128) обнаруживается любое состояние из числа: переходное состояние (172) электродвигателя, нежелательного состояния (174) функционирования электродвигателя или состояния (176) неустойчивого функционирования электродвигателя, в способе (128) на этапе 178 осуществляется вход в процедуру возврата к стандартной настройке. Во время процедуры возврата к стандартной настройке команды частоты остаются неизменными, и в пределах нескольких шагов (то есть периодов быстрого исполнения алгоритма) команда напряжения увеличивается до линейной настройки "В/Гц" или первоначальной настройки "В/Гц". В качестве альтернативы, процедура возврата к стандартной настройке может выборочно давать приращение команде "напряжение-частота" для достижения устойчивого состояния, отслеживая в обратном порядке переход к последнему устойчивому состоянию или пытаясь скорректировать перерегулирование, уменьшая ранее использовавшееся приращение или значение импульса команды "напряжение-частота". Например, если предшествующее значение импульса составляло - 10 вольт, то согласно способу (128) можно дать приращение ранее увеличенной команде "напряжение-частота" на +5 вольт для того, чтобы достигнуть устойчивой точки между двумя самыми последними приращениями команды "напряжение-частота". Как только устойчивое состояние достигнуто, способ возвращается на этап 138.
В соответствии с одним вариантом реализации изобретения предварительно заданные периоды исполнения могут быть назначены для каждого этапа способа (128). Например, каждый из этапов 138-178 может быть назначен на один период из числа: периода быстрого исполнения, T_fast, используемого для мониторинга, защиты и возврата к стандартной настройке (например, 0,5 секунд) и периода медленного исполнения, T_slow, используемого для периода корректировки команды привода для того, чтобы скорректировать функционирование привода и электродвигателя (например, 10 секунд). Предполагается, что значение "по умолчанию" для T_fast и T_slow может изменяться в зависимости от постоянной времени электродвигателя и нагрузки.
На Фиг.5 показан ряд графиков определяемых в реальном масштабе времени параметров электродвигателя, определенных с использованием способа управления, такого как тот, что описан со ссылкой на Фиг. 1-4 для электродвигателя, имеющего номинальную мощность, составляющую приблизительно 125 л.с., которая соответствует полному напряжению, составляющему приблизительно 268,4 В на статической и предварительно заданной линейной характеристике "В/Гц" при команде частоты 35 Гц. На Фиг.5 проиллюстрированы: коэффициент (180) мощности электродвигателя, входная активная мощность (182), ток (184) электродвигателя и скольжение (186) ротора электродвигателя как функция напряжения. Как показано на фигуре, входная активная мощность (182) следует приблизительно линейному графику при уменьшении напряжения от номинальной мощности при сохранении постоянной команды частоты в 35 Гц. Однако коэффициент (180) мощности электродвигателя следует приблизительно квадратичной кривой. Область (188) допустимых значений определяется в соответствии с желательным диапазоном для параметра электродвигателя, такого как, например, ток. Как показано на Фиг.5, в некоторой данной рабочей точке (190), расположенной в пределах области (188) допустимых значений, входная активная мощность (182) электродвигателя уменьшена до оптимальной рабочей мощности (192), составляющей приблизительно 14 кВт, за счет уменьшения напряжения от полного напряжения предварительно заданной характеристики "В/Гц" до напряжения, составляющего 168 В, соответствующего рабочей точке (190). Таким образом, при уменьшении напряжения до достижения рабочей точки (190) активная мощность (182) уменьшается.
Хотя при уменьшении напряжения до рабочей точки, находящейся вне области (188) допустимых значений, может быть возможным дополнительное энергосбережение, такого рода уменьшение может оказывать отрицательные влияния на устойчивость электродвигателя в случае, если напряжение уменьшено слишком сильно. Как показано на Фиг.5, при значениях напряжения, меньших чем приблизительно 168 В, скольжение (186) быстро увеличивается. Скольжение (186), большее, чем приблизительно 3%, может быть нежелательным и может вызвать неустойчивость электродвигателя. Следовательно, область (188) допустимых значений может быть выбрана как оптимальная рабочая точка, поскольку она обеспечивает то, что скольжение (186) остается ниже предварительно определенного пограничного значения скольжения, составляющего 3%. Кроме того, при напряжениях за пределами области (188) допустимых значений ток (182) также увеличивается, что потенциально ведет к состоянию перегрузки по току.
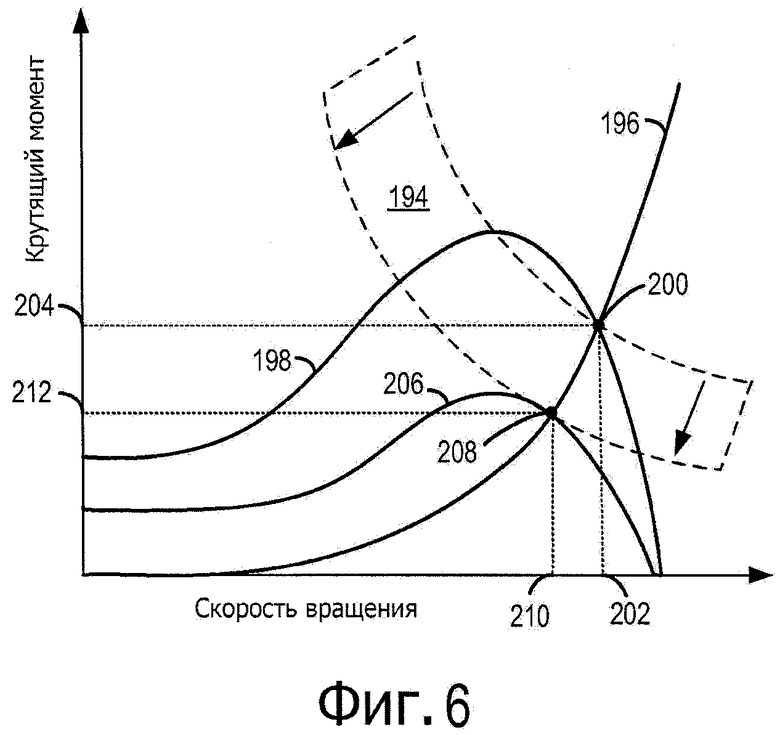
Фиг.6 иллюстрирует энергосбережение (194) в реальном масштабе времени, достигнутое с использованием динамической стратегии управления, оптимизирующей энергопотребление, изложенной в отношении Фиг.4. Кривая (196)нагрузочной характеристики представляет собой характеристическую кривую "крутящий момент/скорость вращения", которая описывает некоторую нагрузку, такую как, например, насос. Характеристика (198) представляет собой характеристику "крутящий момент/скорость вращения" традиционного привода электродвигателя, задействованного в рабочей точке с некоторой данной командой (fcmd) частоты, соответствующей статической и предварительно заданной характеристике "В/Гц". В соответствии с одним вариантом реализации изобретения команда (fcmd) частоты может быть равной опорной частоте fref, которая обычно задается приводу пользователем или контроллером внешнего контура. Привод управляет электродвигателем таким образом, чтобы он имел фактическую основную частоту f1 которая близко следует команде (fcmd) частоты. Фактическая основная частота f1 в электродвигателе определяет синхронную скорость (ωsyn) вращения электродвигателя:

где р представляет собой количество полюсов. Синхронная скорость вращения имеет постоянное значение для электродвигателя на некоторой постоянной частоте. Это некоторая воображаемая максимально возможная скорость, которую электродвигатель мог бы достигнуть в условиях абсолютного отсутствия нагрузки, или в случае, когда крутящий момент составляет ноль). Точка (200) пересечения характеристики (196) и характеристики (198) определяет фактическую рабочую точку электродвигателя при этом условии со скоростью (ω1) (202) вращения электродвигателя и выходным крутящим моментом (T1) (204).
Характеристика (206) представляет собой характеристику "крутящий момент/скорость вращения" оптимизированного привода электродвигателя, задействованного в пределах области допустимых значений в рабочей точке с той же самой командой (fcmd) частоты (как результаты, та же самая фактическая частота f1 и синхронная скорость (ωsyn) вращения), такой как рабочая точка (188), показанная на Фиг.5. Точка пересечения (208) характеристики (206) и характеристики (196) определяет фактическую рабочую точку электродвигателя при этом оптимальном рабочем условии, со скоростью (ω2) (210) вращения электродвигателя и выходным крутящим моментом (Т2) (212).
Как показано на Фиг.6, при некоторой данной команде (fcmd) частоты, традиционный привод электродвигателя функционирует с крутящим моментом (204). Оптимизированный привод электродвигателя, с другой стороны, функционирует с более низким крутящим моментом (212). Это уменьшение крутящего момента от рабочей точке (200) к рабочей точке (208) в результате приводит к снижению входной мощности (194) и, следовательно, сбережению энергии. Примечательно, что при применении оптимизирующего управления фактическая скорость вращения двигателя обычно немного понижается в зависимости от характеристической кривой "крутящий момент/скорость вращения" конкретной нагрузки. Это обычно приемлемо для вариантов применения, при которых не требуется точное регулирование скорости, таких как насос, компрессоры и вентиляторы.
В соответствии с одним вариантом реализации изобретения энергосбережение (194) может быть рассчитано на основе сравнения первоначальной команды "напряжение-частота" и измененной команды "напряжение-частота", соответствующей функционированию в пределах области допустимых значений параметра электродвигателя, и отображаться как цифровое значение энергосбережения на приводе электродвигателя, таком как, например, привод (12) электродвигателя, показанный на Фиг.1. Отображаемое энергосбережение может указывать либо мгновенное значение энергосбережения и/или накопленное энергосбережение на некотором предварительно заданном промежутке времени или в течение срока службы привода. Кроме того, энергосбережение (194) может быть использовано для того, чтобы рассчитывать снижение углеродных выбросов, являющееся результатом уменьшенного потребления энергии, что может быть отображено на счетчике снижения углеродных выбросов, расположенном на приводе (12) электродвигателя.
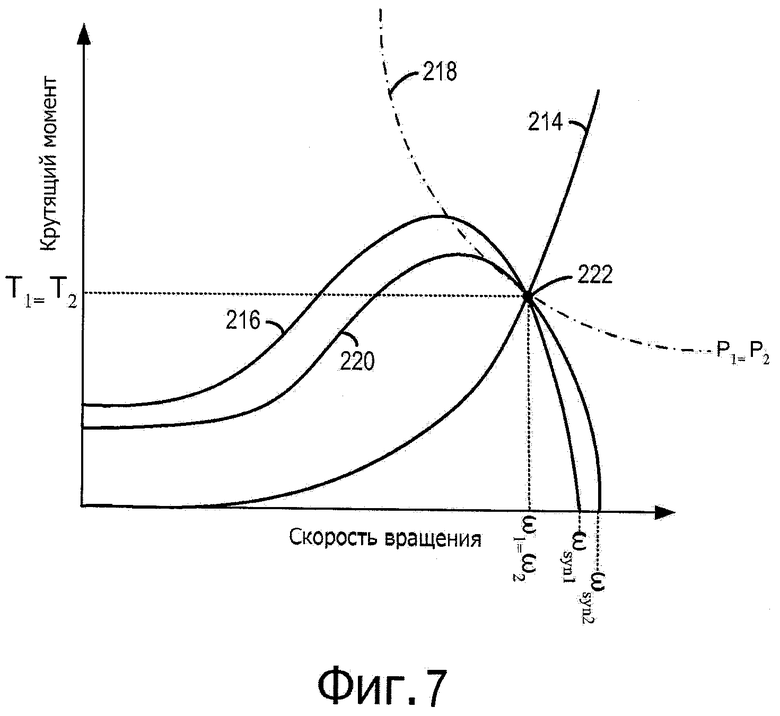
Обратимся теперь к Фиг.7, на которой проиллюстрирована оптимизированная характеристика "крутящий момент-скорость вращения" для вариантов применения, в которых желательно точное регулирование скорости, соответствующая одному варианту реализации изобретения. Кривая (214) нагрузочной характеристики представляет собой характеристическую кривую "крутящий момент/скорость вращения", которая описывает некоторую нагрузку, такую как, например, насос. Первая характеристическая кривая (216) электродвигателя представляет характеристику "крутящий момент/скорость вращения" традиционного привода электродвигателя, задействованного в рабочей точке с некоторой данной командой (fcmd) частоты, соответствующей статической и предварительно заданной характеристике "В/Гц" (218). Вторая характеристическая кривая (220) электродвигателя представляет собой характеристику "крутящий момент/скорость вращения" оптимизированного привода электродвигателя. Как показано на Фиг.7, характеристики (216), (220) пересекают кривую (214) нагрузочной характеристики в точке (222) пересечения, имея общую скорость и крутящий момент.
Эта точка (222) пересечения является результатом функционирования привода электродвигателя в варианте применения, в котором желательно точное регулирование скорости. В такой вариант применения обычно включен контроллер процесса внешнего контура для того, чтобы регулировать команду частоты и вместе со способом управления, оптимизирующего энергопотребление, описанным в отношении Фиг.4, задавать рабочую точку электродвигателя в точке (222) пересечения характеристик (214) и (218). В этом примере контроллер внешнего контура немного увеличит команду (fcmd) частоты таким образом, чтобы она была немного больше чем опорная частота fref (в свою очередь, синхронная скорость вращения, от ωsyn1 до ωsyn2) и в конечном счете установится в первоначальной рабочей точке со скоростью ω1, и выходным крутящим моментом T1. Выходная мощность Р2 будет равна первоначальной выходной мощности Р1
Однако поскольку вторая характеристическая кривая (220) электродвигателя связана с более низким напряжением, подаваемым на электродвигатель, потери в магнитной системе электродвигателя будут уменьшены. Следовательно, от уменьшения потерь в магнитной системе электродвигателя при уменьшенном напряжении достигается энергосбережение. Устойчивое функционирование достигается при взаимодействиях между алгоритмом оптимизации энергопотребления и контроллером внешнего процесса, потому что в этой системе постоянная времени управления процессом внешнего контура (в десятках секунд или минутах), по меньшей мере, в 10 раз быстрее, чем постоянная времени алгоритма оптимизации энергопотребления (в секундах).
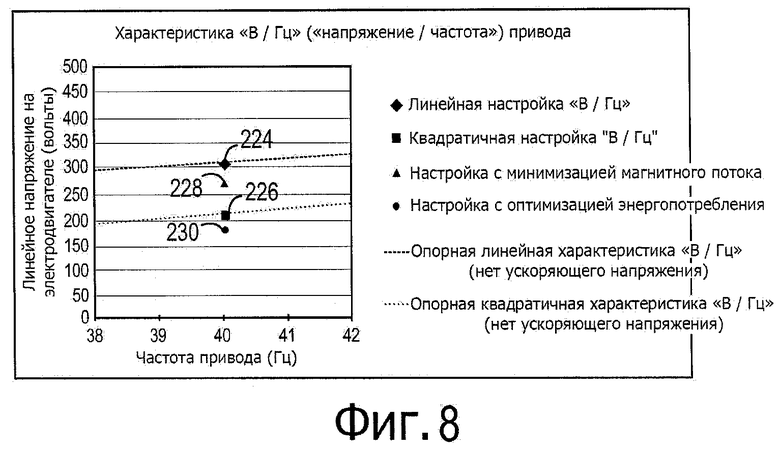
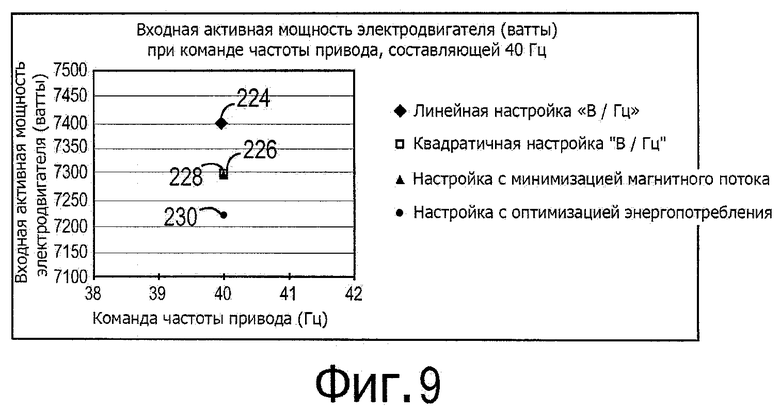
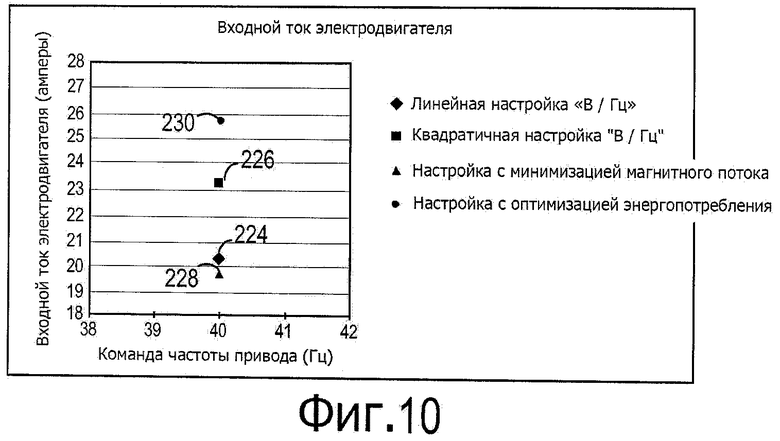
На Фиг. 8-10 показано сравнение напряжения на электродвигателе (Фиг.8), входной ток электродвигателя (Фиг.9) и входная активная мощность электродвигателя (Фиг.10), измеренные при четырех различных условиях управления приводом электродвигателя с использованием разомкнутого привода электродвигателя мощностью 50 л.с. в режиме функционирования 40 Гц: при настройке линейной характеристики "В/Гц" (224); при настройке квадратичной характеристики "В/Гц" (226); при настройке с минимизацией магнитного потока (228) и при настройке с оптимизацией энергопотребления (230), такой как та, что описана в отношении Фиг.4. Как показано на Фиг. 8-10, настройка (228) с минимизация магнитного потока дает минимальный ток, а настройка (230) с оптимизацией энергопотребления дает минимальную входную активную мощность, что приводит к максимальному энергосбережению.
Хотя было описано несколько вариантов реализации изобретения в отношении электродвигателя переменного тока и привода электродвигателя переменного тока, предполагается, что способ оптимизации энергопотребления, сформулированный в данном описании, может быть применен в большом разнообразии вариантов применения. Например, этот способ оптимизации энергопотребления может быть использован в гибридных транспортных средствах для того, чтобы минимизировать выходную мощность или тягу от системы батарей или в источнике бесперебойного питания (UPS) с переменной нагрузкой, такой как для систем освещения. Этот способ может также использоваться в любом варианте применения, в котором используется инвертор на основе широтно-импульсной модуляции, таком как, например, полупроводниковые варианты применения, имеющие преобразователи мощности на основе широтно-импульсной модуляции или в общих вариантах применения инверторов, для того чтобы изменять алгоритм переключения. Способ может быть использован для разнообразных уровней напряжения, включая варианты применения с низким напряжением, средним напряжением и высоким напряжением.
Техническое значение раскрытого способа и устройства заключается в том, что они предусматривают модульно реализуемый способ управления для изменения команды "напряжение-частота" привода электродвигателя переменного тока. На основе измененной команды "напряжение-частота" в этом способе осуществляется управление временем переключения ряда переключателей в устройстве управления электродвигателем таким образом, чтобы уменьшить крутящий момент на электродвигателе и входную мощность электродвигателя.
Следовательно, в соответствии с одним вариантом реализации настоящего изобретения система управления запрограммирована таким образом, чтобы вводить в привод электродвигателя переменного тока начальную команду "напряжение-частота", основанную на начальной характеристике "напряжение/частота" ("В/Гц"), принимать вывод данных в реальном масштабе времени из привода электродвигателя переменного тока, генерируемых в соответствии с этой начальной командой "напряжение-частота", и передавать в обратном направлении приводу электродвигателя переменного тока множество измененных команд "напряжение-частота", причем каждая команда из этого множества измененных команд "напряжение-частота" содержит отклонение от начальной характеристики "В/Гц". Система управления также запрограммирована таким образом, чтобы определять в реальном масштабе времени значение параметра электродвигателя, соответствующее каждой команде из этого множества измененных команд "напряжение-частота" и передавать в обратном направлении приводу электродвигателя переменного тока измененную команду "напряжение-частота", так чтобы это определяемое в реальном масштабе времени значение параметра электродвигателя находилось в пределах некоторой области допустимых значений параметра электродвигателя.
Система управления для управления приводом электродвигателя переменного тока может рассматриваться как имеющая звенья (виртуальные) для выполнения или проведения вышеупомянутых действий процессора. Например, система управления содержит звено для того, чтобы вводить в привод электродвигателя переменного тока начальную команду "напряжение-частота", основанную на начальной характеристике "напряжение/частота" ("В/Гц"), и звено для того, чтобы принимать вывод данных в реальном масштабе времени из привода электродвигателя переменного тока, генерируемых в соответствии с этой начальной командой "напряжение-частота". Система управления также содержит звено для того, чтобы передавать в обратном направлении приводу электродвигателя переменного тока множество измененных команд "напряжение-частота", причем каждая команда из этого множества измененных команд "напряжение-частота" содержит отклонение от начальной характеристики "В/Гц", звено для того, чтобы определять в реальном масштабе времени значение параметра электродвигателя, соответствующее каждой команде из этого множества измененных команд "напряжение-частота", и звено для того, чтобы передавать в обратном направлении приводу электродвигателя переменного тока измененную команду "напряжение-частота", так чтобы это определяемое в реальном масштабе времени значение параметра электродвигателя находилось в пределах некоторой области допустимых значений параметра электродвигателя.
В соответствии с другим вариантом реализации настоящего изобретения способ для управления выходом привода электродвигателя включает в себя этапы, на которых: управляют приводом электродвигателя в соответствии со статическим графиком "напряжение-частота", создавая выходную мощность, и определяют значение некоторого указанного параметра электродвигателя, соответствующее статическому графику "напряжение-частота". Способ также включает в себя этапы, на которых: определяют область допустимых значений указанного параметра электродвигателя, выборочно изменяют статический график "напряжение-частота" во время функционирования привода электродвигателя, создавая пониженную входную мощность электродвигателя, и управляют приводом электродвигателя с настройкой "напряжение-частота", соответствующей значению указанного параметра в пределах области допустимых значений.
В соответствии с еще одним другим вариантом реализации настоящего изобретения привод электродвигателя сконфигурирован таким образом, чтобы подавать мощность на нагрузку. Привод электродвигателя включает в себя инвертор, предназначенный для того, чтобы подавать мощность на нагрузку, и контроллер, операционно с ним соединенный таким образом, чтобы управлять функционированием инвертора. Контроллер сконфигурирован таким образом, чтобы заставлять инвертор регулировать настройку "напряжение-частота" во время функционирования привода электродвигателя для того, чтобы заставлять инвертор функционировать в соответствии с каждой из множества варьированных настроек "напряжение-частота" и контролировать в реальном масштабе времени значение параметра электродвигателя, соответствующее каждой настройке "напряжение-частота". Контроллер также сконфигурирован таким образом, чтобы устанавливать область допустимых значений для этого параметра электродвигателя и заставлять инвертор функционировать в соответствии с такой настройкой "напряжение-частота", при которой параметр электродвигателя находится в пределах области допустимых значений.
Настоящее изобретение было описано в терминах предпочтительного варианта своей реализации, и понятно, что эквиваленты, альтернативные варианты и изменения, отличные от тех, что сформулированы явно, являются возможными и находятся в рамках объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2011 |
|
RU2543503C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2314940C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2022 |
|
RU2798447C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ ДЛЯ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2463699C1 |
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| Smart-инвертор для поддержания норм качества электрической энергии в распределительных сетях электроснабжения 0,4 кВ их установленным значениям и интеллектуально-автоматизированная система управления электрическими сетями на базе Smart-инвертора | 2024 |
|
RU2835155C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОЭНЕРГИИ | 2009 |
|
RU2462806C1 |


Изобретение относится к области электротехники и может быть использовано в электроприводах переменного тока. Техническим результатом является минимизация входной мощности электродвигателя и достижение дополнительного энергосбережения при сохранении условия стабильного функционирования электродвигателя. Система и способ для управления приводом электродвигателя переменного тока содержит систему управления с запрограммированным энергосберегающим алгоритмом, в которой оптимизирована работа привода электродвигателя. Система управления вводит привод начальную команду "напряжение-частота" на основе начальной характеристики напряжение/частота (В/Гц), принимает в режиме реального времени выходные данные привода, генерируемые в соответствии с начальной командой "напряжение-частота" и передает в обратном направлении множество измененных команд "напряжение-частота". Каждая команда из множества измененных команд "напряжение-частота" содержит отклонение от начальной характеристики "В/Гц". Система управления также определяет в режиме реального времени значение параметра электродвигателя, соответствующее каждой из указанного множества измененных команд "напряжение-частота"; и передает в обратном направлении в привод электродвигателя переменного тока измененную команду "напряжение-частота" так, чтобы указанное значение параметра электродвигателя, определяемое в режиме реального времени, находилось в пределах области допустимых значений для этого параметра электродвигателя. 2 н. и 9 з.п. ф-лы, 10 ил.
1. Привод электродвигателя для подачи мощности на нагрузку, содержащий:
инвертор, выполненный с возможностью подавать мощность на нагрузку; и
контроллер, функционально соединенный с инвертором для управления его работой, причем контроллер выполнен с возможностью:
регулировать настройку "напряжение - частота" во время работы привода электродвигателя, с тем чтобы вызывать работу инвертора в соответствии с каждой из множества изменяемых настроек "напряжение - частота";
контролировать в режиме реального времени значение параметра электродвигателя, соответствующее каждой настройке "напряжение - частота";
устанавливать область допустимых значений для указанного параметра электродвигателя; и
вызывать работу инвертора в соответствии с настройкой "напряжение - частота", при которой параметр электродвигателя находится в пределах области допустимых значений.
2. Привод электродвигателя по п.1, в котором область допустимых значений содержит диапазон значений параметра электродвигателя, соответствующих оптимизированному функционированию привода электродвигателя;
при этом контролируемый в режиме реального времени параметр электродвигателя содержит один из следующих параметров: действующее значение напряжения, действующее значение тока, скорость вращения электродвигателя, скольжение ротора электродвигателя, коэффициент мощности электродвигателя и кпд электродвигателя.
3. Привод электродвигателя по п.1, в котором контроллер выполнен с возможностью:
обнаруживать нежелательное состояние электродвигателя на основе значения в режиме реального времени по меньшей мере одного из следующих параметров: коэффициента мощности электродвигателя, кпд скольжения ротора электродвигателя, скорости вращения, напряжения, тока, крутящего момента и температуры; и
регулировать настройку "напряжение - частота" при обнаружении нежелательного состояния электродвигателя.
4. Привод электродвигателя по п.1, в котором контроллер выполнен с возможностью регулировать напряжение на электродвигателе и/или частоту на электродвигателе для регулирования настройки "напряжение - частота" во время функционирования привода электродвигателя таким образом, чтобы минимизировать крутящий момент на электродвигателе и/или входную мощность электродвигателя.
5. Привод электродвигателя по п.1, в котором контроллер выполнен с возможностью определять значение параметра идентификации неустойчивости на основе указанного параметра электродвигателя, контролируемого в режиме реального времени, причем параметр идентификации неустойчивости содержит по меньшей мере один из следующих параметров: напряжение на электродвигателе, ток в электродвигателе, крутящий момент электродвигателя, скорость вращения электродвигателя, скольжение ротора электродвигателя, коэффициент мощности электродвигателя, кпд электродвигателя и температура электродвигателя.
6. Привод электродвигателя по п.5, в котором контроллер выполнен с возможностью:
обнаруживать состояние неустойчивости электродвигателя на основе указанного значения параметра идентификации неустойчивости; и
регулировать настройку "напряжение - частота" в случае обнаружения состояния неустойчивости электродвигателя.
7. Привод электродвигателя по п.6, в котором контроллер дополнительно выполнен с возможностью обнаруживать состояние неустойчивости электродвигателя и/или переходное состояние электродвигателя на основе скорости изменения указанного параметра идентификации неустойчивости.
8. Привод электродвигателя по п.6, в котором контроллер выполнен с возможностью выполнять возврат к стандартной настройке "напряжение - частота" в течение некоторого промежутка времени, с тем чтобы она соответствовала первоначальной характеристике "В/Гц", или линейной характеристике "В/Гц", или предварительно заданной характеристике "В/Гц", в случае обнаружения состояния неустойчивости электродвигателя.
9. Способ управления выходом привода электродвигателя, содержащий этапы, на которых:
управляют приводом электродвигателя в соответствии со статическим графиком "напряжение - частота" для генерации выходной мощности;
определяют значение заданного параметра электродвигателя, соответствующее статическому графику "напряжение - частота";
определяют область допустимых значений указанного заданного параметра электродвигателя;
выборочно изменяют статический график "напряжение - частота" во время работы привода электродвигателя, с тем чтобы генерировать пониженную входную мощность электродвигателя; и
управляют приводом электродвигателя при настройке "напряжение - частота", соответствующей значению указанного заданного параметра электродвигателя, находящемуся в пределах области допустимых значений.
10. Способ по п.9, в котором при выборочном изменении графика "напряжение - частота", заданного по умолчанию:
регулируют настройку "напряжение - частота" во время работы привода электродвигателя таким образом, что генерируется пониженная входная мощность электродвигателя, соответствующая динамическому графику "напряжение - частота"; и
определяют значения указанного заданного параметра электродвигателя для каждой настройки "напряжение - частота" динамического графика "напряжение - частота".
11. Способ по п.9, в котором при определении значения указанного заданного параметра электродвигателя определяют значение одного из следующих параметров: действующее значение напряжения на электродвигателе, действующее значение тока в электродвигателе, входная мощность электродвигателя, скорость вращения электродвигателя, скольжение ротора электродвигателя, коэффициент мощности электродвигателя, кпд действия электродвигателя и температура электродвигателя.
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2005 |
|
RU2289197C1 |
| US 7233125 B2, 19.06.2007 | |||
| US 5646499 A, 08.07.1997 | |||
| US 2007024231 A1, 01.02 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| УСТРОЙСТВО для ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ ДАТЧИКА В ЧАСТОТУ | 0 |
|
SU330477A1 |

