Область техники
Настоящее изобретение в общем относится к способу управления насосной установкой, содержащей насос и блок управления, причем насос содержит двигатель, и блок управления выполнен с возможностью приведения в действие этого двигателя. В частности, настоящее изобретение относится к способу управления насосной установкой, где двигатель во время работы связан с рабочим параметром, на основе которого можно получить его крутящий момент, и рабочий параметр имеет нормальное значение PN во время нормальной работы двигателя в первом направлении.
Уровень техники
При перекачивании жидкости, например, сточных вод, содержащих твердый материал, например, при помощи погружного насоса, рано или поздно твердый материал станет оказывать отрицательное влияние на способность насоса транспортировать жидкость. Твердый материал быстро пристает в гидравлическом блоке насоса и медленно прикрепляется к крыльчатке насоса, а также к внутренней стороне корпуса насоса, что отрицательно влияет на гидравлическую эффективность насоса, и насос будет работать в напряженном режиме из-за увеличенного сопротивления вращению, увеличенного крутящего момента и ухудшившихся гидравлических свойств. В настоящее время известно несколько путей более или менее автоматической очистки насоса, когда насос, или, точнее, гидравлический блок насоса, начинает засоряться. Напряженный режим работы не причиняет непосредственный вред насосу, однако может возникнуть увеличенное потребление энергии, и ухудшается производительность насоса, что увеличивает затраты для владельца предприятия и может привести к сопутствующим отрицательным эффектам, таким как затопление насосной станции, когда имеющейся подачи насоса недостаточно для откачивания жидкости из насосной станции.
Известные способы очистки, или способы управления насосной установкой, позволяют обнаружить, что необходима очистка, и после этого выполнить заранее определенную стандартную последовательность очистки, что, по меньшей мере, влечет за собой замедление двигателя насоса из-за необходимости длительного заранее определенного понижения скорости двигателя блоком управления. Как известно, мгновенной остановки двигателя насоса не происходит, в частности, из-за необходимости избегать так называемого "гидравлического удара" в трубопроводной системе по потоку ниже насоса, а также из-за высокого крутящего момента и большого количества движения, которые крыльчатка насоса имеет во время нормальной работы. Если двигатель сразу остановился, неизбежно будет возникать гидравлический удар, когда кинетическая энергия и момент инерции жидкости в трубах по потоку ниже насоса обусловят вибрации, которые приводят к возникновению риска разрушения труб и других конструктивных элементов, кроме того, существует неминуемый риск ослабления крепления крыльчатки, повреждения приводного вала насоса и т.д. Таким образом, всегда имеет место длительное и управляемое понижение скорости двигателя.
Прямым следствием того, что способ очистки не является интеллектуальным, является то, что используемая стандартная последовательность очистки, которая подходит во время напряженного режима работы, как описано выше, приводит к существенному увеличению нагрузки на насос, когда в гидравлический блок насоса поступает большой и/или твердый объект, который вызывает заклинивание, т.е., когда возникает разрушительный режим работы насосной установки. Разрушительный режим работы означает режим работы, который сразу же или в течение короткого периода времени повлечет за собой поломку насоса и/или блока управления. Если блок управления, например, имеющий вид преобразователя частоты (VFD, Variable-Frequency Drive - Электропривод с регулированием частоты), осуществляет упомянутое понижение, когда большой и/или твердый объект вызвал заклинивание и механическое торможение крыльчатки, длительное и управляемое понижение скорости двигателя вынуждает крыльчатку вращаться, и этот объект вызывает еще более сильное/более серьезное заклинивание. Это, в свою очередь, приводит к перенапряжению и повреждению крыльчатки, приводного вала двигателя (и т.д.) насоса или блока управления.
Чтобы предотвратить повреждение насоса и/или блока управления, используют различные системы безопасности/защитное оборудование, например, размыкатель для безопасного разъединения, плавкие предохранители и т.д., которые предназначены для защиты оборудования и приводятся в действие до того, как оборудование повредится. Общим для описанных выше разрушительных режимов работы, т.е., если размыкаются триггеры системы безопасности и/или выходит из строя насосная установка, является то, что обслуживающий персонал должен выполнить аварийное отключение и устранить сбой/засорение. Эти отключения являются дорогими, и, кроме того, простой насоса предполагает дополнительные затраты для владельца предприятия.
Сущность изобретения
Краткое описание задачи изобретения
Целью настоящего изобретения является устранение указанных выше недостатков и недочетов уже известных способов очистки и предложение усовершенствованного способа управления насосной установкой. Основной задачей изобретения является предложить усовершенствованный способ управления насосной установкой, соответствующей первоначально определенному типу, при применении которого заметно будет увеличиваться количество засорений, с которыми насосная установка может справиться самостоятельно.
Другой задачей настоящего изобретения является предложить способ управления насосной установкой, который является достаточно совершенным, чтобы устранить необходимость для обслуживающего персонала выполнять аварийные отключения.
Краткое описание особенностей изобретения
Согласно изобретению, по меньшей мере, основная его задача будет решаться при помощи первоначально определенного способа, имеющего признаки, указанные в независимых пунктах Формулы изобретения. Предпочтительные варианты реализации настоящего изобретения дополнительно указаны в зависимых пунктах Формулы изобретения.
Согласно настоящему изобретению, предлагается способ управления насосной установкой первоначально определенного типа, который отличается наличием следующих этапов:
- приводят в действие при помощи блока управления двигатель в первом направлении;
- останавливают двигатель, если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI ≥ 1,05*PN;
- приводят в действие при помощи блока управления двигатель во втором направлении, противоположном первому направлению, в течение заранее определенного времени TR промывки; и
- останавливают двигатель, если абсолютная величина реального значения Р рабочего параметра в течение времени TR промывки превысила абсолютную величину первого предельного значения PL1 открепления, где |PL1| ≥ 1,1*PI, в противном случае останавливают двигатель по истечении времени TR промывки и выполняют возврат к нормальной работе.
Таким образом, настоящее изобретение основано на осознании того, что при применении подхода, при котором прекращают задействовать двигатель в первом направлении при более низком крутящем моменте, чем момент, при котором прекращают задействовать двигатель во втором направлении, т.е., обеспечивают больший допустимый крутящий момент для открепления материала, вызвавшего заклинивание, по сравнению с крутящим моментом, который вызвал заклинивание этим материалом, насосная установка защищается, и аварийные отключения будут практически полностью исключаться.
Согласно предпочтительному варианту реализации настоящего изобретения, после этапа остановки двигателя, если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI ≥ 1,05*PN, способ дополнительно содержит следующие этапы:
- приводят в действие при помощи блока управления двигатель в первом направлении в течение заранее определенного времени TK проверки; и
- останавливают двигатель, если реальное значение Р рабочего параметра в течение времени TK проверки превысило предельное значение PF проверки ложной тревоги, где PF ≤ PI.
За счет этого реализуется обнаружение ложной тревоги, при котором можно избежать ненужной работы насоса в обратном направлении.
Согласно предпочтительному варианту реализации настоящего изобретения, после этапа остановки двигателя, если абсолютная величина реального значения Р рабочего параметра превысила абсолютную величину первого предельного значения PL1 открепления, где |PL1| ≥ 1,1*PI, способ дополнительно содержит следующие этапы:
- приводят в действие при помощи блока управления двигатель в первом направлении в течение заранее определенного времени TR промывки; и
- останавливают двигатель, если реальное значение Р рабочего параметра превысило второе предельное значение PL2 открепления, где PL2 ≥ PI и PL2 ≤ 0,95*|PL1|.
Таким образом, после первой неудачной попытки открепления с обратным направлением, насосная установка пытается открепить материал, вызвавший заклинивание, путем попытки открепления с прямым направлением с использованием допустимого крутящего момента, который больше допустимого крутящего момента во время нормальной работы в прямом направлении, но меньше допустимого крутящего момента во время открепления с обратным направлением.
Согласно предпочтительному варианту реализации настоящего изобретения, рабочий параметр образован потреблением энергии двигателем.
Другие преимущества и отличительные особенности изобретения станут очевидными при ознакомлении с другими зависимыми пунктами Формулы изобретения и приведенным далее подробным описанием предпочтительных вариантов его реализации.
Краткое описание чертежей
Более полное понимание указанных выше и других признаков настоящего изобретения будет получено из приведенного далее подробного описания предпочтительных вариантов его реализации, в котором делается ссылка на приложенные чертежи, из которых:
на Фиг.1 схематично показана насосная станция, содержащая насосную установку;
на Фиг.2 приведена блок-схема, иллюстрирующая первый вариант новаторского способа;
на Фиг.3 приведена блок-схема, иллюстрирующая второй вариант новаторского способа;
на Фиг.4 приведена блок-схема, иллюстрирующая третий вариант новаторского способа;
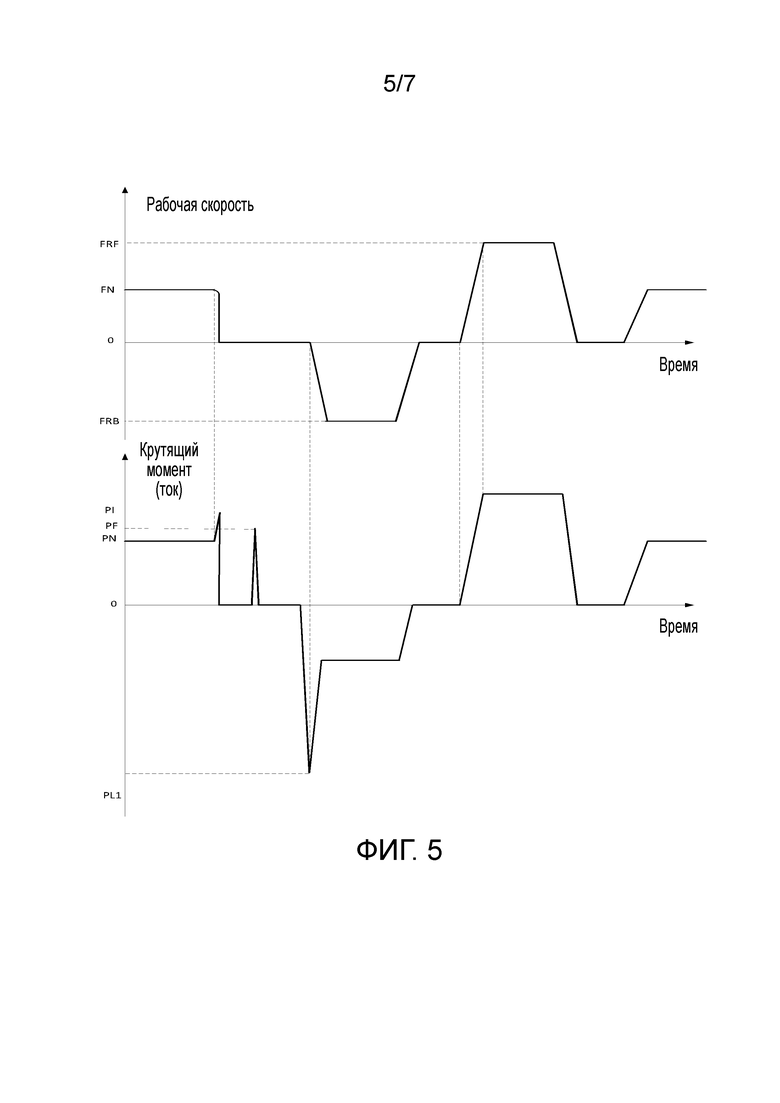
на Фиг.5 приведена схема, иллюстрирующая изменение потребления энергии насосом в зависимости от времени при удачных очистке/откреплении во втором направлении;
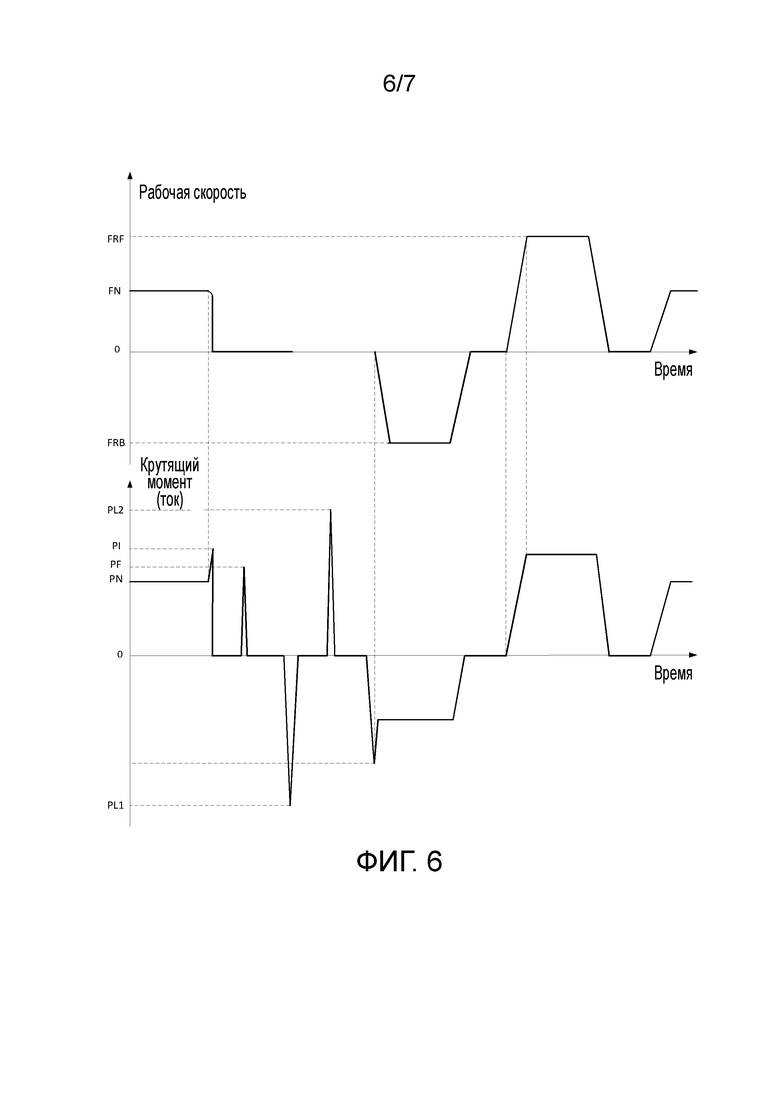
на Фиг.6 приведена схема, иллюстрирующая изменение потребления энергии насосом в зависимости от времени при удачном откреплении во втором направлении после нескольких неудачных попыток открепления; и
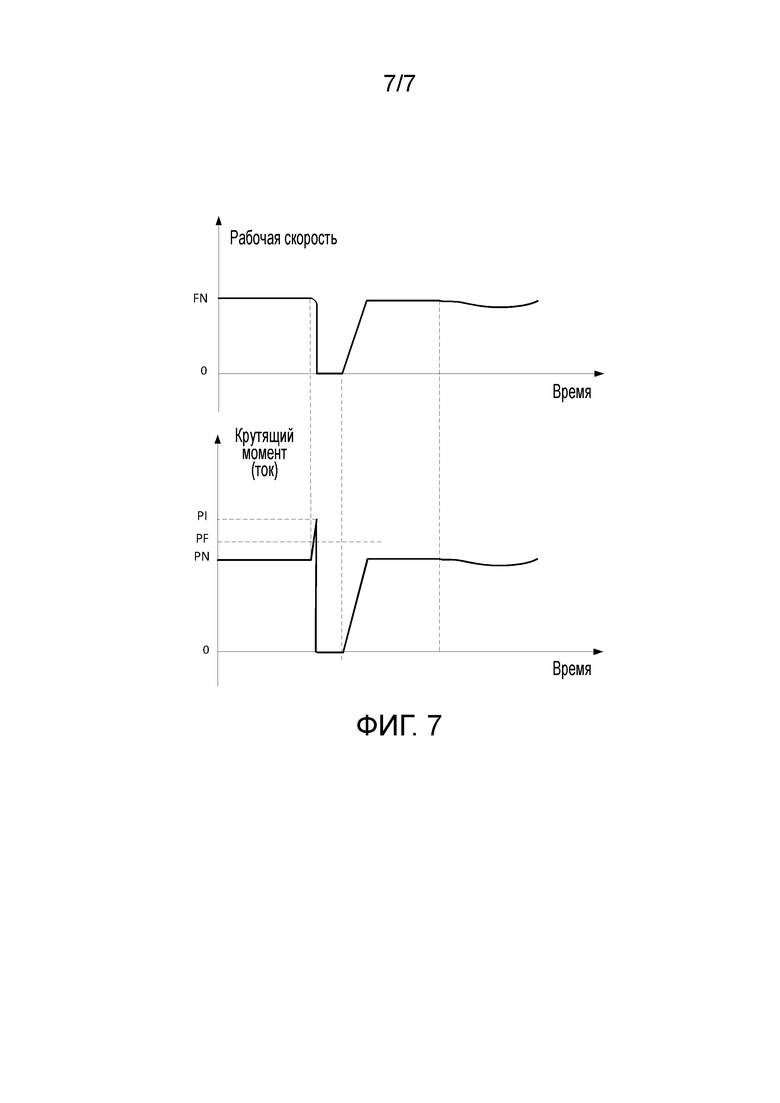
на Фиг.7 приведена схема, иллюстрирующая изменение потребления энергии насосом в зависимости от времени при ложном засорении.
Подробное описание предпочтительных вариантов реализации
На Фиг.1 показана насосная станция, в общем обозначенная ссылочным номером 1, которая содержит, по меньшей мере, один насос 2 с управлением скоростью, обычно - два погружных насоса, выполненных с возможностью в активном состоянии откачивать жидкость из отстойника 3, входящего в состав насосной станции 1, в выпускную трубу 4 и на расстояние от насосной станции 1. Кроме того, насосная станция 1 содержит, как обычно, по меньшей мере, один датчик 5 уровня, выполненный с возможностью определения уровня жидкости в насосной станции 1. Отметим, что датчик 5 уровня может представлять собой отдельное устройство, которое функционально связано с внешним блоком 6 управления, функционально связано с упомянутым, по меньшей мере, одним насосом 2 с управлением скоростью, которое встроено в упомянутый, по меньшей мере, один насос 2 с управлением скоростью, и т.д. Упомянутый, по меньшей мере, один насос 2 с управлением скоростью в предпочтительном случае функционально связан с внешним блоком 6 управления для возможности управления скоростью насоса, в качестве альтернативы, упомянутый, по меньшей мере, один насос 2 с управлением скоростью может содержать встроенный блок управления (не показано). Ниже термин "блок 6 управления" будет использоваться без учета его физического расположения.
Насос 2 и блок 6 управления вместе образуют, по меньшей мере, часть насосной установки, где насос 2 содержит электрический двигатель 7, который выполнен с возможностью его приведения в действие при помощи блока 6 управления, и крыльчатку 8, которая соединена с двигателем 7 посредством приводного вала 9 обычным образом. Предпочтительно крыльчатка 8 является открытой, и наиболее предпочтительно эту крыльчатку во время работы можно перемещать в насосе 2 в осевом направлении, относительно крышки всасывания/вставного кольца на впуске насоса.
Термином "с управлением скоростью" охватываются все возможные методы изменения скорости насоса или, точнее, скорости вращения/ рабочей скорости двигателя 7. Прежде всего, это относится к управлению частотой подаваемого тока при помощи преобразователя частоты (электропривод с изменением частоты), который встроен в насос или является внешним, и который представляет собой пример блока 6 управления, причем во время нормальной работы скорость вращения пропорциональна частоте подаваемого тока. Однако также допускается внутреннее или внешнее управление подаваемым напряжением. Таким образом, если обобщать, для изобретения является несущественным то, как происходит управление рабочей скоростью насоса 2, и существенно только то, что этой скоростью можно управлять/ее можно регулировать.
Целью новаторского способа является управление насосной установкой, содержащей насос 2, имеющий двигатель 7, и блок 6 управления, выполненный с возможностью управления двигателем 7, с целью обеспечения эффективной очистки насоса при засорении. В этом контексте насосная станция 1 будет считаться обособленным объектом, в который поступает входящая жидкость и из которого откачивается выходящая жидкость. Применительно к настоящему изобретению, насосная станция будет рассматриваться без учета типа жидкости и без учета того, что является источником жидкости, и того, куда жидкость перекачивается. В случае, если насосная станция содержит несколько насосов 2, может иметь место их подходящая смена, однако это дополнительно в настоящей заявке на рассматривается.
Кроме того, насос 2 запускают и останавливают во время нормальной работы в соответствии с известными способами, и это здесь не описано.
На Фиг.2 показан заранее определенный вариант способа, в общем обозначенного ссылочным номером 10, для управления насосной установкой, содержащей насос 2 и блок 6 управления. Отметим, что новаторский способ 10 может быть расширен за счет одного или более вспомогательных способов и/или может выполняться параллельно/последовательно с другими способами управления.
Новаторский способ 10 управления насосной установкой на практике представляет собой способ очистки насоса, который полностью или частично засорился, т.е., в насос 2 поступил инородный материал и вызвал заклинивание крыльчатки 8.
Степень засорения и/или тип засорения определяют нагрузку на двигатель 7 насоса 2 и характеризуют режим работы насосной установки. Таким образом, двигатель 7 в каждый конкретный момент времени, когда насос 2 находится в активном состоянии, и этот двигатель при помощи блока 6 управления задействован в первом направлении, и связан с уровнем нагрузки, который соответствует режиму работы насосной установки. Насосная установка также содержит средства для периодического или постоянного отслеживания, по меньшей мере, одного рабочего параметра, на основе которого может быть получен крутящий момент двигателя 7, либо путем непосредственного измерения, либо путем получения в результате измерения другого рабочего параметра/количества. Упомянутый рабочий параметр Р в предпочтительном случае представляет собой потребление тока или крутящий момент, но также возможны и другие рабочие параметры, например, потребление энергии. В реальности, когда гидравлический блок насоса 2 полностью или частично засоряется, уровень нагрузки на двигатель 7 будет меняться, что приводит к изменению крутящего момента и рабочей скорости/скорости вращения. Прямым следствием этого является соответствующее изменение потребления тока, потребления энергии и т.д. насосом, при этом крутящий момент двигателя 7 может быть получен, например, на основе потребления им тока. В предпочтительном случае отслеживают реальное потребление тока насосом 2 или, точнее, двигателем 7, когда насос 2 находится в упомянутом выше активном состоянии, и ниже изобретение будет описано с принятием этого за основу. Однако будет понятно, что изобретение не ограничивается измерением потребления тока как рабочего параметра. Рабочий параметр имеет нормальное значение PN во время нормальной работы двигателя 7 в первом направлении. Под первым направлением имеется в виду то, что крыльчатка 8 приводится в действие в прямом направлении, т.е., откачивает жидкость через выпускную трубу 4.
Теперь новаторский способ 10 будет описан в наиболее общей форме со ссылкой на Фиг.2.
Выполнение способа 10 начинается, когда насос 2 находится в своем активном состоянии, и двигатель 7 при помощи блока 6 управления задействован в первом направлении. При этом и во время нормальной работы первое направление представляет собой направление, обеспечивающее транспортировку жидкости крыльчаткой 8 из отстойника 3 через выпускную трубу 4, т.е., двигатель 7 задействован в прямом направлении. При запуске насоса 2, т.е., начиная из неактивного состояния этого насоса, блок 6 управления выполняет управляемое, например, линейное, повышение реальной рабочей скорости (скорости вращения) F двигателя 7 от 0 до рабочей скорости FN, используемой во время нормальной работы, которая, например, составляет приблизительно 75% - 85% от так называемой максимальной скорости FMAX вращения двигателя 7. Максимальная скорость вращения двигателя 7 представляет собой скорость вращения, которую этот двигатель имеет, если насос 2 непосредственно подсоединить к электрической сети (т.е., с обычной частотой подаваемого тока 50 Гц или 60 Гц). Нормальная рабочая скорость FN, например, может иметь постоянное значение или значение, меняющееся со временем, например, может иметь значение, задаваемое вручную, или значение, автоматически оптимизируемое в зависимости от мгновенного потребления энергии, и т.д. Это также приводит к тому, что нормальное значение PN рабочего параметра может быть постоянным или может меняться со временем в соответствии с имеющимся статусом нормальной рабочей скорости FN. Также отметим, что другая природа перекачиваемой жидкости приводит к другой нагрузке на насос 2 при неизменной нормальной рабочей скорости FN, в результате чего нормальное значение PN рабочего параметра также зависит от нагрузки на насос 2 в конкретной области применения, т.е., в другие насосные станции поступает жидкость, имеющая другие характеристики. Кроме того, жидкость, поступающая в одну и ту же насосную станцию, может иметь разные характеристики в разные часы дня.
Когда насос 2 находится в упомянутом активном состоянии, определяется/отслеживается реальное значение Р упомянутого, по меньшей мере, одного рабочего параметра, и в описываемом варианте определяется реальное потребление тока. Во время нормальной работы реальное потребление тока/энергии колеблется поблизости от номинального значения потребления тока из-за того, что в гидравлический блок насоса 2 поступает твердый материал, встречающийся в перекачиваемой жидкости, который оказывает воздействие на этот блок и транспортируется через него, и, таким образом, оказывает мгновенное воздействие на уровень нагрузки/крутящий момент двигателя 7.
Во время отслеживания реального значения Р упомянутого, по меньшей мере, одного рабочего параметра, можно определить, действует ли на двигатель 7 приложенная извне сила в такой степени, что возникает разрушительный режим работы насосной установки, что имеет место, если уровень нагрузки/крутящий момент в двигателе 7 превысили разрушительный для насосной установки уровень. Под "разрушительным режимом работы" подразумевается режим работы, который сразу же или в течение короткого периода времени будет приводить к перегрузке и поломке насоса 2 и/или блока 6 управления, если не изменить режим работы двигателя 7, в качестве альтернативы, будут запущены системы безопасности/защитное оборудование. Разрушительный режим работы имеет место, если в гидравлический блок насоса 2 поступает большой и/или твердый объект, и застревает как клин между крыльчаткой 8 и корпусом насоса или крышкой всасывания/вставным кольцом.
Способ 10, когда двигатель 7 задействован в первом направлении, содержит этап определения того, превышает ли реальное значение Р рабочего параметра заранее определенное предельное значение PI засорения, где PI больше или равно нормальному значению PN рабочего параметра, умноженному на коэффициент 1,05. Если P > PI, двигатель 7 останавливается, в противном случае продолжает нормальную работу. В предпочтительном случае связь между заранее определенным предельным значением PI засорения для рабочего параметра и нормальным значением PN рабочего параметра является следующей: PI ≥ 1,1*PN, и наиболее предпочтительно: PI ≥ 1,2*PN.
Отметим, что из-за того, что нормальное значение PN рабочего параметра может меняться во время работы, также будет меняться предельное значение PI засорения для рабочего параметра, однако приведенная выше взаимная их связь остается.
Выражение "остановка двигателя" означает перевод насоса 2 из активного состояния в неактивное состояние. Этап остановки двигателя 7 в предпочтительном случае включает в этой связи непосредственное прекращение блоком 6 управления сразу после определения засорения приведения в действие двигателя 7 в первом направлении. Функцию непосредственного прекращения приведения в действие реализуют путем задания рабочей скорости FN двигателя 7 равной нулю в блоке 6 управления, т.е., понижения скорости вращения двигателя 7 не происходит, либо путем задания рабочей скорости FN двигателя 7 равной нулю за счет отсоединения этого двигателя, т.е., делают двигатель 7 совершенно неработоспособным. Это приводит к тому, что инородный объект, который поступил в гидравлический блок насоса 2 и вызвал в нем заклинивание, не вызывает более сильного/более серьезного заклинивания.
После обнаружения засорения и остановки двигателя 7, в способе 10 начинают последовательность очистки. После этапа, на котором двигатель 7 остановлен, выполняют этап приведения в действие при помощи блока 6 управления двигателя 7 во втором направлении, противоположном первому направлению, в течение заранее определенного времени TR промывки. Термин "задействование двигателя 7 во втором направлении" означает, что двигатель 7 приводят в действие в обратном направлении. В течение времени TR промывки насосная установка пытается смыть объект, который вызвал заклинивание, обратно в отстойник 3.
В течение времени TR промывки и приведения в действие двигателя 7 во втором направлении, блок 6 управления пытается обеспечить в двигателе 7 скорость FRB очистки с обратным направлением. Абсолютная величина скорости FRB очистки с обратным направлением в предпочтительном случае находится в диапазоне 75% - 85% от максимальной скорости FMAX вращения двигателя 7. В течение времени TR промывки в способе выполняют этап определения того, превысила ли абсолютная величина реального значения Р рабочего параметра абсолютную величину первого предельного значения PL1 открепления, где абсолютная величина первого предельного значения PL1 открепления для рабочего параметра больше или равна предельному значению PI засорения для рабочего параметра, умноженному на коэффициент 1,1. Если |P| > |PL1|, то двигатель 7 останавливают, это означает, что материал, который вызвал заклинивание, не освобожден и не смыт при первой попытке открепления с обратным направлением. Если |P| < |PL1|, то двигатель 7 останавливают по истечении времени TR промывки и затем выполняют возврат к нормальной работе, это означает, что материал, который вызвал заклинивание, смыт назад в отстойник 3 при первой попытке открепления с обратным направлением. В предпочтительном случае связь между первым предельным значением PL1 открепления для рабочего параметра и предельным значением PI засорения для рабочего параметра является следующей: |PL1| ≥ 2*PI, и наиболее предпочтительно: |PL1| ≥ 3*PI.
После этапа, на котором двигатель 7 останавливают после того, как определено, что реальное значение Р рабочего параметра превысило предельное значение PI засорения, способ в предпочтительном случае содержит также этап сохранения неактивного состояния насоса 2 в течение заранее определенного времени TV ожидания. Другими словами, насос 2 оставляют неактивным в течение времени TV ожидания перед тем, как будет инициирована первая попытка открепления с обратным направлением, или перед проверкой ложной тревоги, что будет описано ниже.
После этапа, на котором двигатель 7 останавливают по истечении времени TR промывки, способ в предпочтительном случае также содержит этап сохранения неактивного состояния насоса 2 в течение заранее определенного времени TV ожидания. Другими словами, насос 2 оставляют неактивным в течение времени TV ожидания перед возобновлением нормальной работы.
Теперь обратимся к Фиг.3, на которой представлено дополнение к способу, соответствующему Фиг.2, в виде проверки ложной тревоги, другие части способа 10 остаются неизменными и ниже не описаны.
После этапа, на котором двигатель 7 останавливают после того, как определено, что реальное значение Р рабочего параметра превысило предельное значение PI засорения, способ содержит этап приведения в действие при помощи блока 6 управления двигателя 7 в первом направлении в течение заранее определенного времени TK проверки. В течение времени TK проверки в способе выполняют этап определения того, превышает ли реальное значение Р рабочего параметра предельное значение PF проверки ложной тревоги для рабочего параметра, где предельное значение PF проверки ложной тревоги для рабочего параметра меньше или равно предельному значению PI засорения для рабочего параметра. Проверку ложной тревоги выполняют один или несколько раз. Если P > PF, то двигатель 7 останавливают, это означает, что тревога не является ложной, и засорение подтверждается. При проверке ложной тревоги материал, который вызвал остановку двигателя 7 из-за засорения, иногда смывается через выпускную трубу 4. В предпочтительном случае связь между предельным значением PF проверки ложной тревоги для рабочего параметра и нормальным значением PN рабочего параметра является следующей: PF ≥ PN. В течение времени TK проверки и в течение приведения в действие двигателя 7 в первом направлении, блок 6 управления пытается обеспечить скорость FF двигателя 7 при ложной тревоге, которая в предпочтительном случае равна нормальной рабочей скорости FN.
По истечении времени TK проверки блок 6 управления может продолжить задействование двигателя 7 в первом направлении в соответствии с нормальной работой, в качестве альтернативы, двигатель 7 может быть остановлен, и насос 2 остается в неактивном состоянии в течение заранее определенного времени TV ожидания перед тем, как будет возобновлена нормальная работа.
После этапа, на котором двигатель 7 останавливают после того, как определено, что реальное значение Р рабочего параметра превысило предельное значение PF проверки ложной тревоги, способ в предпочтительном случае также содержит этап сохранения неактивного состояния насоса 2 в течение заранее определенного времени TV ожидания. Другими словами, насос 2 оставляют неактивным в течение времени TV ожидания перед тем, как будет инициирована первая попытка открепления с обратным направлением.
Теперь обратимся к Фиг.4, на которой представлено дополнение к способу, соответствующему Фиг.2, в виде попытки открепления с прямым направлением, другие части способа 10 остаются неизменными и ниже не описаны.
После этапа, на котором двигатель 7 останавливают после того, как определено, что абсолютная величина реального значения Р рабочего параметра превысила абсолютную величину первого предельного значения PL1 открепления, способ содержит этап приведения в действие при помощи блока 6 управления двигателя 7 в первом направлении в течение заранее определенного времени TR промывки. В течение времени TR промывки и приведения в действие двигателя 7 в первом направлении, блок 6 управления пытается обеспечить в двигателе 7 скорость FRF очистки с прямым направлением.
Скорость FRF очистки с прямым направлением в предпочтительном случае находится в диапазоне 75% - 100% от максимальной скорости FMAX вращения двигателя 7. В течение времени TR промывки в способе выполняют этап определения того, превысило ли реальное значение Р рабочего параметра второе предельное значение PL2 открепления, где второе предельное значение PL2 открепления больше или равно предельному значению PI засорения для рабочего параметра и меньше или равно абсолютной величине первого предельного значения PL1 открепления, умноженной на коэффициент 0,95. Если P > PL2, то двигатель 7 останавливают, это означает, что материал, который вызвал заклинивание, не освобожден и не смыт при первой попытке открепления с прямым направлением. Если P < PL2, то по истечении времени TR промывки блок 6 управления может продолжать задействовать двигатель 7 в первом направлении в соответствии с нормальной работой, в качестве альтернативы, двигатель 7 может быть остановлен, и неактивное состояние насоса 2 сохраняют в течение заранее определенного времени TV ожидания перед тем, как возобновить нормальную работу. P < PL2 означает, что материал, который вызвал заклинивание, смывается через выпускную трубу 4 во время первой попытки открепления с прямым направлением. В предпочтительном случае связь между первым предельным значением PL1 открепления для рабочего параметра и вторым предельным значением PL2 открепления для рабочего параметра является следующей: PL2 ≤ 0,85*|PL1|, и наиболее предпочтительно: PL2=0,8*|PL1|.
Отметим, что после первой попытки открепления с обратным направлением можно осуществить еще одну или более попыток открепления с обратным направлением перед осуществлением первой попытки открепления с прямым направлением. Кроме того, в способе 10 можно несколько раз чередовать попытки открепления с обратным направлением и попытки открепления с прямым направлением перед вызовом обслуживающего персонала на предприятие, причем каждая попытка открепления с обратным направлением может содержать одну или более таких попыток, и каждая попытка открепления с прямым направлением может содержать одну или более таких попыток. Например, первое предельное значение PL1 открепления можно увеличивать после каждой неудачной попытки открепления, и второе предельное значение PL2 открепления можно увеличивать после каждой неудачной попытки открепления.
Когда материал, вызвавший заклинивание, освобожден, и перед возобновлением нормальной работы способ 10 также может содержать промывку насоса 2 путем приведения в действие при помощи блока 6 управления двигателя 7 в первом направлении при максимальной скорости FMAX вращения в течение времени TR промывки.
И, наконец, обратимся к Фиг.5 - Фиг.7, на которых схематично показаны разные последовательности очистки с использованием верхнего графика, на котором показана реальная рабочая скорость/скорость вращения насоса/двигателя и то, как она изменяется с течением времени, и на нижнем графике показаны реальные крутящий момент/потребление тока для насоса/двигателя и то, как они изменяются с течением времени.
На Фиг.5 обнаруживается засорение, после чего выполняется проверка ложной тревоги, подтверждающая засорение. После этого осуществляют первую попытку открепления с обратным направлением, которая является удачной. Затем выполняют промывку в прямом направлении, при этом имеется необязательное последующее время ожидания, в течение которого насос является неактивным, перед возобновлением нормальной работы.
На Фиг.6 обнаруживается засорение, после чего выполняется проверка ложной тревоги, подтверждающая засорение. После этого осуществляют первую попытку открепления с обратным направлением, которая является неудачной, первую попытку открепления с прямым направлением, которая является неудачной, и вторую попытку открепления с обратным направлением, которая является удачной. Затем выполняют промывку в прямом направлении, при этом имеется необязательное последующее время ожидания, в течение которого насос является неактивным, перед возобновлением нормальной работы.
На Фиг.7 обнаруживается засорение, после чего выполняется проверка ложной тревоги, подтверждающая, что тревога является ложной, и нормальная работа возобновляется.
Возможные модификации изобретения
Изобретение не ограничивается только теми вариантами, которые описаны выше и показаны на чертежах, и целью которых является, главным образом, иллюстрация и приведение примера. Предполагается, что эта заявка на патент охватывает все адаптации и модификации описанных здесь предпочтительных вариантов, таким образом, настоящее изобретение определено содержанием пунктов приложенной Формулы изобретения, и поэтому оборудование может быть модифицировано любыми путями, не выходящими за пределы объема, указанного в пунктах приложенной Формулы изобретения.
Отметим, что, даже если это явным образом не указано, особенности конкретного варианта могут быть скомбинированы с особенностями другого варианта, причем такая комбинация будет считаться очевидной, если она возможна.
Будет понятно, что время TV ожидания может иметь разную продолжительность на разных стадиях способа, однако для ясности в описании, а также в пунктах Формулы изобретения предполагается одна и та же примерная величина. Время TV ожидания находится в диапазоне трех секунд.
Будет понятно, что время TR промывки может иметь разную продолжительность на разных стадиях способа, однако для ясности в описании, а также в пунктах Формулы изобретения предполагается одна и та же примерная величина. Время TR промывки находится в диапазоне трех секунд.
Точные величины предельных значений, упомянутых в этом документе, зависят от конкретной насосной установки и среды, в которой она находится во время работы, и поэтому не указаны, существенными в этом документе являются именно связи между упомянутыми предельными значениями.
Будет понятно, что в этой спецификации и Формуле изобретения, если контекст не требует иного, слово "содержащий" и такие вариации, как "содержит" или "содержащий" должны пониматься как подразумевающие включение указанного элемента или этапа, либо группы элементов или этапов, но не исключение любого другого элемента или этапа, либо группы элементов или этапов.




Изобретение относится к способу управления насосной установкой при засорении насоса. Насосная установка содержит насос с двигателем (Д) и блок управления с возможностью приведения в действие Д. Во время работы Д имеет рабочий параметр, на основе которого можно определить его крутящий момент. Рабочий параметр имеет нормальное значение PN во время нормальной работы Д в первом направлении. Согласно способу приводят в действие при помощи блока управления Д в первом направлении; останавливают Д, если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI≥1,05⋅PN; приводят в действие при помощи блока управления Д во втором направлении, противоположном первому направлению, в течение заранее определенного времени TR промывки; и останавливают Д, если абсолютная величина реального значения Р рабочего параметра в течение времени TR промывки превысила абсолютную величину первого предельного значения PL1 открепления, где |PL1|≥1,1⋅PI, в противном случае останавливают Д по истечении времени TR промывки и выполняют возврат к нормальной работе. Изобретение направлено на увеличение количества засорений, с которыми насосная установка может справиться самостоятельно, и устранить необходимость обслуживающему персоналу выполнять аварийные отключения. 10 з.п. ф-лы, 7 ил.
1. Способ управления насосной установкой при засорении насоса, причем насосная установка содержит насос (2) и блок (6) управления, насос (2) содержит двигатель (7) и блок (6) управления выполнен с возможностью приведения в действие двигателя (7), при этом во время работы двигатель (7) связан с рабочим параметром, из которого можно получить крутящий момент двигателя (7), причем рабочий параметр имеет нормальное значение PN во время нормальной работы двигателя (7) в первом направлении, и этот способ отличается наличием следующих этапов:
- приводят в действие двигатель (7) в первом направлении при помощи блока (6) управления;
- останавливают двигатель (7), если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI≥1,05⋅PN;
- приводят в действие, при помощи блока (6) управления, двигатель (7) во втором направлении, противоположном первому направлению, в течение заранее определенного времени TR промывки; и
- останавливают двигатель (7), если абсолютная величина реального значения Р рабочего параметра в течение времени TR промывки превысила абсолютную величину первого предельного значения PL1 открепления, где |PL1|≥1,1⋅PI, в противном случае останавливают двигатель (7) по истечении времени TR промывки и выполняют возврат к нормальной работе.
2. Способ по п.1, в котором связь между предельным значением PI засорения для рабочего параметра и нормальным значением PN рабочего параметра является следующей: PI≥1,1⋅PN, предпочтительно PI≥1,2⋅PN.
3. Способ по п.1 или 2, в котором связь между первым предельным значением PL1 открепления для рабочего параметра и предельным значением PI засорения для рабочего параметра является следующей: |PL1|≥2⋅PI, предпочтительно |PL1|≥3⋅PI.
4. Способ по любому из пп. 1-3, который после этапа остановки двигателя (7), если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI≥1,05⋅PN, дополнительно содержит следующий этап:
- сохраняют неактивное состояние насоса (2) в течение заранее определенного времени TV ожидания.
5. Способ по любому из пп. 1-4, который после этапа, на котором в противном случае останавливают двигатель (7) по истечении времени TR промывки, дополнительно содержит следующий этап:
- сохраняют неактивное состояние насоса (2) в течение заранее определенного времени TV ожидания.
6. Способ по любому предшествующему пункту, который после этапа остановки двигателя (7), если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI≥1,05⋅PN, дополнительно содержит следующие этапы:
- приводят в действие при помощи блока (6) управления двигатель (7) в первом направлении в течение заранее определенного времени TK проверки; и
- останавливают двигатель (7), если реальное значение Р рабочего параметра в течение времени TK проверки превысило предельное значение PF проверки ложной тревоги, где PF≤PI.
7. Способ по п. 6, в котором связь между предельным значением PF проверки ложной тревоги для рабочего параметра и нормальным значением РN рабочего параметра является следующей: PF≥PN.
8. Способ по любому предшествующему пункту, который после этапа остановки двигателя (7), если абсолютная величина реального значения Р рабочего параметра превысила абсолютную величину первого предельного значения PL1 открепления, где |PL1|≥1,1⋅PI, дополнительно содержит следующие этапы:
- приводят в действие при помощи блока (6) управления двигатель (7) в первом направлении в течение заранее определенного времени TR промывки; и
- останавливают двигатель (7), если реальное значение Р рабочего параметра превысило второе предельное значение PL2 открепления, где PL2≥PI и PL2≤0,95⋅|PL1|.
9. Способ по п.8, в котором связь между вторым предельным значением PL2 открепления и первым предельным значением PL1 открепления является следующей: PL2≤0,85⋅|PL1|, предпочтительно PL2=0,8⋅|PL1|.
10. Способ по любому предшествующему пункту, в котором рабочий параметр образован потреблением энергии двигателем (7).
11. Способ по любому предшествующему пункту, в котором подэтап остановки двигателя (7) на этапе остановки двигателя (7) в случае, если реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, где PI≥1,05⋅PN, включает то, что блок (6) управления сражу после определения того, что реальное значение Р рабочего параметра превысило заранее определенное предельное значение PI засорения, непосредственно прекращает действие двигателя (7) в первом направлении.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| JP 11270463 A, 05.10.1999 | |||
| JP 5007577 B2, 22.08.2012 | |||
| JP 2006029222 A, 02.02.2006 | |||
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ЗАСОРЕНИЯ МЕХАНИЗМОВ ЭЛЕКТРОЦЕНТРОБЕЖНЫХ НАСОСОВ В СКВАЖИНАХ | 2003 |
|
RU2262006C2 |

