ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится к управлению выпуском двигателя с датчиками, предусмотренными как выше, так и ниже по потоку от каталитического нейтрализатора.
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Каталитические нейтрализаторы отработавших газов могут быть предусмотрены для снижения токсичности выделения продуктов сгорания с отработавшими газами, однако, по мере того, как топливо-воздушное соотношение транспортного средства меняется на условия обогащения или обеднения, состояние каталитического нейтрализатора может снижать его эффективность в предотвращении попадания в атмосферу вредных выбросов, таких как СО или NOx. Датчики кислорода могут быть предусмотрены для определения состояния каталитического нейтрализатора; однако, это может не обеспечивать быстрой реакции на динамические изменения режима работы, давая в результате вредные выбросы, выпускаемые во время переходных режимов работы.
Изобретатели осознали проблемы с вышеприведенным подходом и предложили способ и систему для по меньшей мере частичного принятия мер в ответ на них. В одном из вариантов осуществления, предложен способ для управления выпуском двигателя с расположенным выше по потоку датчиком и расположенным ниже по потоку датчиком. Способ содержит настройку уставки для расположенного ниже по потоку датчика на основании скорости изменения массового расхода воздуха выше по потоку от двигателя и настройку впрыска топлива, чтобы регулировать топливо-воздушное соотношение (FAR) на расположенном ниже по потоку датчике по настроенной уставке и чтобы регулировать FAR отработавших газов на расположенном выше по потоку датчике по уставке расположенного выше по потоку датчика.
Таким образом, состояние каталитического нейтрализатора может контролироваться и впрыск топлива может настраиваться, чтобы гарантировать, что каталитический нейтрализатор не превышает пороговую величину окислителей или восстановителей, посредством предсказания вероятных условий обедненного или обогащенного FAR. Настоящее раскрытие может предложить несколько преимуществ. Например, предотвращение насыщения каталитического окислителя или восстановителя снижает выбросы СО и NOx, и улучшает экономию топлива.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, при его прочтении в одиночку или в связи с прилагаемыми чертежами.
Должно быть понятно, что краткое изложение сущности изобретения, приведенное выше, предоставлено для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Оно не предполагается для идентификации ключевых или существенных признаков заявленного изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленное изобретение не ограничено реализациями, которые устраняют какие-либо недостатки, отмеченные выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает принципиальную схему стандартного двигателя, включающего в себя контур расположенного выше по потоку датчика UEGO, контур расположенного ниже по потоку датчика HEGO и элемент регулятора.
Фиг. 2 показывает структурную схему регулятора топливо-воздушного соотношения.
Фиг. 3 показывает пример картирования производной массового расхода воздуха на динамическую уставку HEGO.
Фиг. 4 показывает блок-схему последовательности операций способа определения уставки HEGO на основании условий эксплуатации двигателя по фиг. 1.
Фиг. 5А-5С показывают изменение уставки HEGO со временем в ответ на командные сигналы, выдаваемые различными типами ПИ-регулятора у регулятора топлива с обратной связью по фиг. 2.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее раскрытие предусматривает способ и систему для регулирования топливо-воздушного соотношения в транспортном средстве посредством настройки впрыска топлива на основании контуров обратной связи по датчику кислорода, которые дают информацию касательно состояния каталитического нейтрализатора. Таким образом, вредные выбросы, такие как СО и NOx, могут снижаться, а экономия топлива может улучшаться.
Со ссылкой на фиг. 1, двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один цилиндр которого показан на фиг. 1, управляется электронным контроллером 12 двигателя. Двигатель 10 включает в себя камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в них и присоединенным к коленчатому валу 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответственный впускной клапан 52 и выпускной клапан 54. Каждый впускной клапан и выпускной клапан может приводиться в действие кулачком 51 впускного клапана и кулачком 53 выпускного клапана. В качестве альтернативы, один или более из впускных и выпускных клапанов могут приводиться в действие электромеханически управляемым узлом катушки и якоря клапана. Положение кулачка 51 впускного клапана может определяться датчиком 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может определяться датчиком 57 кулачка выпускного клапана.
Впускной коллектор 44 также показан присоединенным к цилиндру двигателя, имеющему топливную форсунку 66, присоединенную к нему, для подачи жидкого топлива пропорционально длительности импульса сигнала FPW из контроллера 12. Топливо подается в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос, топливные магистрали и направляющую-распределитель для топлива. Двигатель 10 по фиг. 1 выполнен так, чтобы топливо впрыскивалось непосредственно в цилиндр двигателя, каковое известно специалистам в данной области техники как непосредственный впрыск. В качестве альтернативы, жидкое топливо может подвергаться оконному впрыску. Топливная форсунка 66 питается рабочим током из формирователя 68, который реагирует на действие контроллера 12. В дополнение, впускной коллектор 44 показан сообщающимся с необязательным дросселем 64 с электронным управлением. В одном из примеров, может использоваться система непосредственного впрыска низкого давления, где давление топлива может подниматься до приблизительно 20-30 бар. В качестве альтернативы, двухкаскадная топливная система высокого давления может использоваться для формирования более высоких давлений топлива.
Система 88 зажигания без распределителя выдает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на действие контроллера 12. Универсальный датчик 126 кислорода выхлопных газов (UEGO) показан присоединенным к выпускному коллектору 4 8 выше по потоку от каталитического нейтрализатора 70 отработавших газов. Подогреваемый датчик 127 содержания кислорода в отработавших газах (HEGO) показан присоединенным к выпускному каналу ниже по потоку от каталитического нейтрализатора 70. Оба датчика 126 и 127 выдают данные в контроллер 12, подробнее обсужденный ниже.
Нейтрализатор 70 отработавших газов, в одном из примеров, включает в себя многочисленные брикеты катализатора. В еще одном примере, могут использоваться многочисленные устройства снижения токсичности отработавших газов, каждое с многочисленными брикетами. Нейтрализатор 70 отработавших газов, в одном из примеров, может быть катализатором трехфункционального типа.
Контроллер 12 показан на фиг. 1 в качестве традиционного микрокомпьютера, включающего в себя: микропроцессорный блок 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, дежурную память 110 и традиционную шину данных. Контроллер 12 показан принимающим различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе: температуру охлаждающей жидкости двигателя (ЕСТ) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; датчика 134 положения, присоединенного к педали 130 акселератора для считывания усилия/положения, примененных ступней 132; измерение давления во впускном коллекторе двигателя (MAP) с датчика 122 давления, присоединенного к впускному коллектору 44; датчика положения двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; измерение массы воздуха, поступающего в двигатель, с датчика 120; и измерение положения дросселя с датчика 62. Барометрическое давление также может считываться (датчик не показан) для обработки контроллером 12. В предпочтительном аспекте настоящего описания, датчик 118 положения двигателя вырабатывает заданное количество равномерно разнесенных импульсов каждый оборот коленчатого вала, по которому может определяться частота вращения двигателя (RPM, в оборотах в минуту).
В некоторых вариантах осуществления, двигатель может быть присоединен к системе электродвигателя/аккумуляторной батареи в транспортном средстве с гибридным приводом. Транспортное средство с гибридным приводом может иметь параллельную конфигурацию, последовательную конфигурацию, либо их варианты или комбинации.
Во время работы, каждый цилиндр в двигателе 10 типично подвергается четырехтактному циклу: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска, обычно, выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух вовлекается в камеру 30 сгорания через впускной коллектор 44, поршень 36 перемещается к дну цилиндра, с тем чтобы увеличивать объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится около дна цилиндра и в конце своего хода (например, когда камера 30 сгорания находится при своем наибольшем объеме), типично упоминается специалистами в данной области техники как нижняя мертвая точка (НМТ, BDC). Во время такта сжатия, впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке блока цилиндров, с тем, чтобы сжимать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и самой близкой к головке блока цилиндров (например, когда камера 30 сгорания находится при своем наименьшем объеме), типично упоминается специалистами в данной области техники в качестве верхней мертвой точки (ВМТ, TDC). В процессе, в дальнейшем упоминаемом как впрыск, топливо вводится в камеру сгорания. В процессе, в дальнейшем упоминаемом как воспламенение, впрыснутое топливо воспламеняется известным средством воспламенения, таким как свеча 92 зажигания, приводя к сгоранию. Во время такта расширения, расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. В заключение, во время такта выпуска, выпускной клапан 54 открывается, чтобы выпускать подвергнутую сгоранию топливо-воздушную смесь в выпускной коллектор 48, и поршень возвращается в ВМТ. Отметим, что вышеприведенное показано просто в качестве примера, и что установки момента открывания и/или закрывания впускного и выпускного клапанов могут меняться так, чтобы давать положительные или отрицательное перекрытие клапанов, позднее закрывание впускного клапана, или различные другие примеры.
Топливо-воздушное соотношение (FAR) в отработавших газах может регулироваться посредством предоставления регулятора FAR, который использует контуры обратной связи по датчику кислорода для определения коэффициента настройки для впрыска топлива. Таким образом, впрыск топлива настраивается для диагностики ухудшения характеристик каталитического нейтрализатора, изменения состояния каталитического нейтрализатора и предотвращения состояний, имеющих слишком большое содержание восстановителя или слишком большое содержание окислителя в каталитическом нейтрализаторе. Это препятствует выходу вредных выбросов, таких как СО и NOx, из транспортного средства.
Фиг. 2 показывает структурную схему регулятора 200 топливо-воздушного соотношения (FAR), включенного в двигатель 10 по фиг. 1. Регулятор 200 поддерживает требуемое топливо-воздушное соотношение, настраивая величину впрыска топлива в двигатель на основании обратной связи с датчиков отработавших газов. В одном из вариантов осуществления, регулятор использует обратную связь с многочисленных датчиков, датчиков кислорода в этом примере, расположенных в многочисленных местоположениях вдоль выпускного тракта. Датчики могут быть расположены, из условия, чтобы один датчик был расположен выше по потоку от каталитического нейтрализатора отработавших газов, а другой датчик был расположен ниже по потоку от каталитического нейтрализатора отработавших газов. В этой конфигурации, расположенный выше по потоку датчик является широкодиапазонным датчиком, способным к выдаче непрерывной широкодиапазонной оценки FAR. Таким образом, широкодиапазонный датчик может выявлять большой диапазон оценок FAR, однако, приносит в жертву точность. Расположенный ниже по потоку датчик, в противоположность, является узкодиапазонным датчиком, способным к выполнению гораздо более точных оценок газовой стехиометрии, чем широкодиапазонный датчик, однако, принося в жертву допустимые для измерения диапазоны. Вне диапазона, сигнал датчика насыщается, обуславливая очень узкий диапазон непрерывной работы датчика.
Как показано на фиг. 2, универсальный датчик 126 содержания кислорода в отработавших газах (UEGO) расположен выше по потоку от каталитического нейтрализатора отработавших газов, а подогреваемый датчик 127 содержания кислорода в отработавших газах (HEGO) расположен ниже по потоку от каталитического нейтрализатора 70 отработавших газов. Если расположен в потоке отработавших газов до каталитического нейтрализатора, датчик 127 HEGO реализован в качестве переключателя. Однако когда расположен в отработавших газах после каталитического нейтрализатора, FAR может фильтроваться и центроваться в достаточной мере около стехиометрии, из условия чтобы датчик 127 HEGO мог давать более точную оценку газовой стехиометрии, работая в своем узком линейном диапазоне. По существу, напряжение HEGO указывает как FAR отработавших газов, так и состояние каталитического нейтрализатора, в показателях относительных количеств окислителей и восстановителей в каталитическом нейтрализатора 70 либо в показателях связанной концепции величины запаса кислорода, который имеется в распоряжении в каталитическом нейтрализаторе 70. Каждый тип информации касательно состояния каталитического нейтрализатора указывает способность каталитического нейтрализатора 70 обрабатывать поступающие выбросы. Например, более высокое напряжение указывает истощение запаса кислорода, а более низкое напряжение указывает повышение мощности запаса кислорода.
Расположение датчиков 126 и 127 UEGO и HEGO создает систему датчиков, которая иногда упоминается как вспомогательный контур контур датчика UEGO, который стремится регулировать отработавшие газы до того, как они проходят через снижающий выбросы каталитический нейтрализатор 70 - и основной контур - контур датчика HEGO, который измеряет отработавшие газы после того, как они проходят через каталитический нейтрализатор 70. Вспомогательный контур регулирует отработавшие газы до того, как они проходят через сокращающий выбросы каталитический нейтрализатор 70. Вспомогательный контур регулирует FAR питающего газа (отработавших газов, выведенных из двигателя), для того чтобы снижать выбросы, предотвращать ухудшение экономии топлива и избегать проблем шума, вибрации и неплавности движения (NVH) или проблем возможностей вождения. Вспомогательный контур также ответственен за регулирование FAR питающего газа, для того чтобы отслеживать целевое значение, установленное основным контуром. Основной контур использует измерения отработавших газов после того, как проходят через каталитический нейтрализатор 70, чтобы определять целевое значение на основании условий эксплуатации и напряжения датчика после каталитического нейтрализатора (HEGO).
Как описано выше, фиг. 2 иллюстрирует один из вариантов осуществления системы управления, которая управляет выпуском двигателя с расположенным выше по потоку датчиком и расположенным ниже по потоку датчиком, настраивая уставку для расположенного ниже по потоку датчика на основании скорости изменения массового расхода воздуха выше по потоку от двигателя и настраивая впрыск топлива, чтобы регулировать топливо-воздушное соотношение (FAR) на расположенном ниже по потоку датчике по настроенной уставке и чтобы регулировать FAR отработавших газов на расположенном выше по потоку датчике по уставке расположенного выше по потоку датчика. Дополнительно, система управления определяет изменения массового расхода воздуха, которые выпадают из диапазона пороговых значений и, в ответ, рассчитывает скорость изменения фильтрованного массового расхода воздуха, картирует рассчитанную скорость изменения фильтрованного массового расхода воздуха по отношению к приращению настройки уставки HEGO, чтобы определять коэффициент настройки, настраивает статическую уставку на основании статических входных условий посредством коэффициента настройки и устанавливает уставку HEGO в настроенную статическую уставку. Таким образом, можно улучшать возможности регулятора основного контура, которые, в свою очередь, дают возможность улучшения управления содержанием кислорода и диагностики каталитического нейтрализатора.
В частности, система управления по фиг. 2 (которая дополнительно конкретизирована в процедуре, изображенной на фиг. 4), использует оцененное изменение массового расхода, определенное выше по потоку в системе впуска воздуха двигателя, чтобы динамически заранее подготавливать состояние
каталитического нейтрализатора для восприятия условий избыточного обогащения или обеднения, вызванных изменениями массового расхода в двигателе 10. Подготовка полагается на модуляцию уставки напряжения HEGO относительно номинально запланированного значения (например, установившегося состояния).
Структурная схема регулятора топливо-воздушного соотношения, показанная на фиг. 2, изображает сущность обратной связи и коррекцию ошибки системы управления. Как проиллюстрировано, система управления управляет изменением уставки HEGO и основывает уставку на статических измерениях массового расхода HEGO наряду с одновременным учетом переходной настройки, основанной на динамических условиях массового расхода, для того чтобы подавлять выбросы надлежащим динамическим смещением уставки HEGO. Таким образом, если ожидается переходный процесс обеднения и/или переход на высокую нагрузку, уставка HEGO, а, таким образом, и конечные уставка UEGO и величина впрыска топлива, настраиваются, чтобы приводить работу к более низкому запасу кислорода каталитического нейтрализатора.
Для того чтобы обеспечивать вышеописанную настройку, опорный сигнал FAR дает целевое значение FAR для вспомогательного контура UEGO в качестве сконфигурированного обратной связью из основного контура HEGO. Датчик 127 HEGO выдает измеренное HEGO напряжение с использованием измерений, взятых ниже по потоку от каталитического нейтрализатора отработавших газов (и, по выбору, выше по потоку от необязательного 2ого каталитического нейтрализатора 220). Это измеренное напряжение затем преобразуется в нормализованное топливо-воздушное соотношение (фи) блоком 202 оценки измеренного фи. Рабочие характеристики, такие как число оборотов и нагрузка двигателя (для статического определения уставки HEGO) или массовый расход на дросселе (для определения динамической уставки HEGO) вводятся в определитель 204 уставки HEGO. Определитель 204 выдает опорное напряжение HEGO в фильтр 206 отставания-упреждения, который выдает фильтрованное опорное напряжение в блок 208 оценки опорного фи, для того чтобы преобразовать опорное напряжение в нормализованное топливо-воздушное соотношение (фи). В качестве альтернативы, опорная уставка может быть основана на температуре отработавших газов. Фильтр 206 отставания-упреждения обрабатывает команду уставки напряжения HEGO для настройки уровня оцененного фи, для того чтобы подавлять высокочастотное и пропускать более низкочастотное содержание сигнала, чтобы обеспечивать более быструю реакцию системы без
перерегулирования. Таким образом, ступень HEGO настраивается постепенно, сначала посредством достижения части запрошенной ступени, затем экспоненциального увеличения до полного запрошенного значения ступени. Величина ступени и скорость роста экспоненты основаны на динамических характеристиках системы под управлением с обратной связью, то есть, зависят от выбора регулятора 209, 210 с обратной связью.
Разность между измеренным фи и опорным фи затем определяется, для того чтобы выдавать подвергнутый профилированию амплитудно-частотной характеристики сигнал ошибки, представляющий смещение между измеренным и опорным напряжением HEGO, в пропорционально-интегральный (ПИ) регулятор 210. Два напряжения преобразуются в нормализованное топливо-воздушное соотношение (фи), так как напряжение HEGO перекрывает гораздо больший диапазон для данного обедненного фи, чем для обогащенного фи. Поэтому, преобразование до определения ошибки гарантирует, что обогащенные или обедненные условия не оказывают влияния на расчет ошибки, обусловленного нелинейным картированием напряжения HEGO в оцениваемое фи. Фильтр 209 отставания-упреждения обрабатывает сигнал ошибки основного контура (нормализованное опорное напряжение уставки HEGO минус нормализованное измеренное значение уставки HEGO), который, в находящихся по другую сторону функциональных возможностях (хотя и необязательно в той же самой полосе частот) в качестве фильтра отставания-упреждения команды уставки опорного напряжения HEGO, усиливает верхние частоты относительно нижних частот, для того чтобы производить более чувствительный, но устойчивый контроль над режимом работы каталитического нейтрализатора. ПИ-регулятор 210 действует на этот подвергнутый профилированию амплитудно-частотной характеристики сигнал ошибки, чтобы создавать команду управления, отправляемую в опорное значение 212 FAR, для того чтобы предоставлять измеренному основным контуром напряжению HEGO возможность оказывать влияние на регулирование вспомогательного контура.
Вспомогательный контур определяет реакцию регулятора на отклонение между измеренным фи после каталитического нейтрализатора и опорным фи уставки. Датчик 126 UEGO расположен выше по потоку от каталитического нейтрализатора 70 отработавших газов, из условия, чтобы он брал измерения потока отработавших газов, проникающих в каталитический нейтрализатор 70 отработавших газов, как показано на фиг. 2. Разность между этим измерением и опорным сигналом FAR из основного контура рассчитывается, для того чтобы определить сигнал ошибки, который обрабатывается регулятором 214 подстройки с обратной связью. Обработанный сигнал ошибки и опорный сигнал FAR затем выдаются в регулятор 216 без обратной связи, для того чтобы отобразить в виде карты FAR по отношению к настройке впрыска топлива. Отработавшие газы 218 до каталитического нейтрализатора затем контролируются посредством UEGO 126 для определения реакции регулятора.
Таким образом, уставка расположенного ниже по потоку датчика может настраиваться, чтобы учитывать переходный режим работы, даже если статическая уставка является одной и той же в начале и конце переходного процесса. Например, во время замедления транспортного средства, где топливо не перекрывается, FAR, которое попадает в каталитический нейтрализатор, иногда не будет точно регулироваться, и вероятность стать слишком обогащенным является более высокой при таком маневре. Во время такого переходного процесса система дает команду, чтобы запас кислорода каталитического нейтрализатора временно увеличивался, посредством снижения уставки напряжения HEGO, так что более обогащенное FAR может выдерживаться в течение более длительного периода. Подобное действие регулирования по основному контуру для случая ускорения, в котором топливная система без обратной связи имеет тенденцию формировать более бедные смеси и более высокие концентрации NOx питающего газа, может быть защищено посредством настройки уставки напряжения HEGO более высокой, а каталитического нейтрализатора, чтобы был обеднен кислородом.
Для того чтобы создавать достаточно искусное регулирование по основному контуру для предоставления возможности динамического планирования уставки HEGO наряду с нахождением в рамках ограничений накопительной способности каталитического нейтрализатора, регулятор требует нескольких признаков, приведенных в настоящем раскрытии. Прежде всего, регулятор принимает во внимание несколько частотных режимов работы основного контура: более низкочастотную характеристику каталитического нейтрализатора/HEGO (операцию более медленного интегрирования, которая происходит, когда каталитический нейтрализатор наполняется или опустошается), и более высокочастотную характеристику, в которой часть сбросных газов проходит через каталитический нейтрализатор, не контактируя с запасом кислорода каталитического нейтрализатора (прямое прохождение). Для того чтобы избежать избыточного действия регулятора, которое будет приводить каталитический нейтрализатор в полностью насыщенное или истощенное состояния, регулятор избегает чрезмерной реакции на составляющую прямого прохождения. Однако, для того чтобы обеспечить достаточно быструю реакцию для удовлетворения вышеприведенных динамических настроек уставки, более медленное интегрирующее действие ускоряется, чтобы переходить из одного устойчивого интегрируемого состояния в другое.
Частью замысла обратной связи основного контура является определение реакции регулятора на отклонение между фи после каталитического нейтрализатора (нормализованным HEGO,
преобразованным из напряжения датчика HEGO) и фи уставки (нормализованной уставкой, преобразованной из напряжения уставки). Преобразование, описанное в материалах настоящей заявки, является нелинейной операцией с гистерезисом. Пропорционально-интегральный (ПИ) регулятор вновь представляет одну из возможностей. Однако, природа каталитического нейтрализатора с режимом внутреннего интегрирования (запасом кислорода) и прямым прохождением ограничивает скорость и/или точность реакции с ПИ-регулятором. Профилирование амплитудно-частотной характеристики, которое повышает содержание сигнала в полосе средних частот, и подавляет высокие и низкие частоты, может использоваться для улучшения скорости реакции приблизительно с коэффициентом от 2 до 3 и подавления возмущений с коэффициентом приблизительно 4 наряду с сохранением хорошей устойчивости и надежности.
В результате агрессивности регулятора с обратной связью, реакция на команду может страдать от перерегулирования. Более точно, высокочастотное содержание командного сигнала могло бы привести к достижению каталитическим нейтрализатором предела запаса кислорода (полностью заполненного или истощенного), который, в свою очередь, вызывал бы прорыв СО или NOx. Ступенчатая команда, типичный результат рабочей настройки, произведенной посредством планирования команды на основании других условий транспортного средства, будет вызывать перерегулирование в реакции. Действенный подход к уменьшению проблемы состоит в том, чтобы осуществлять фильтрацию отставания-упреждения (тип профилирования амплитудно-частотной характеристики) команды в блоке 206, который эффективно предоставляет возможность пропуска части ступеньки для приближения к окончательному значению ступени в качестве экспоненциального затухания. Система немедленно реагирует на частичную ступеньку. Перерегулирование системы будет достигать всего лишь исходного требуемого значения ступени в этих условиях. Оставшийся командный сигнал, который медленно нарастает, в таком случае вынуждает систему оставаться возле требуемого значения.
Дополнительно, определенные физические характеристики датчика HEGO, которые соотносят FAR с выходным напряжением HEGO, создают искажение в отношении обогащенного и обедненного FAR. Это может приводить к нелинейному искажению коэффициента усиления и может подвергаться поправке. Проблема происходит из преобразования напряжения HEGO в оценку нормализованного топливо-воздушного соотношения. Напряжение HEGO перекрывает гораздо больший диапазон для данного обедненного фи, чем для обогащенного фи. Этот способ преобразует уставку напряжения HEGO и измерение HEGO по отдельности в нормализованное топливо-воздушное соотношение до вычисления ошибки (разности между двумя сигналами). Это может показаться эквивалентным простому взятию преобразования сигнала ошибки по напряжению, но, вследствие нелинейного картирования напряжения HEGO по отношению к оцененному фи, сигнал ошибки по напряжению при данном числовом значении будет иметь иное значение в фи, когда обеднено в отличие от того, когда обогащено, поэтому, сначала определяются командное и измеренное напряжения HEGO, а затем, берется разность для определения фи.
В дополнение, диагностика каталитического нейтрализатора также может быть включена в один из вариантов осуществления. Здесь, чтобы периодически определять накопительную способность каталитического нейтрализатора, процедура вводит изменения уставки для напряжения HEGO после каталитического нейтрализатора, чтобы нагружать каталитический нейтрализатор в очень строгих пределах (конкретизированных на этапе 420), принимая управление выходного сигнала блока 204 на фиг. 2. Усовершенствования управления, описанные со ссылкой на фиг. 4, снижают потенциальную возможность для переполнения или истощения запаса кислорода каталитического нейтрализатора во время переходных процессов, так что принудительная модуляция уставки не вызывает нежелательных выбросов. Соответственно, фиг. 4 показывает блок-схему последовательности операций способа для определения уставки HEGO на основании условий эксплуатации двигателя 10.
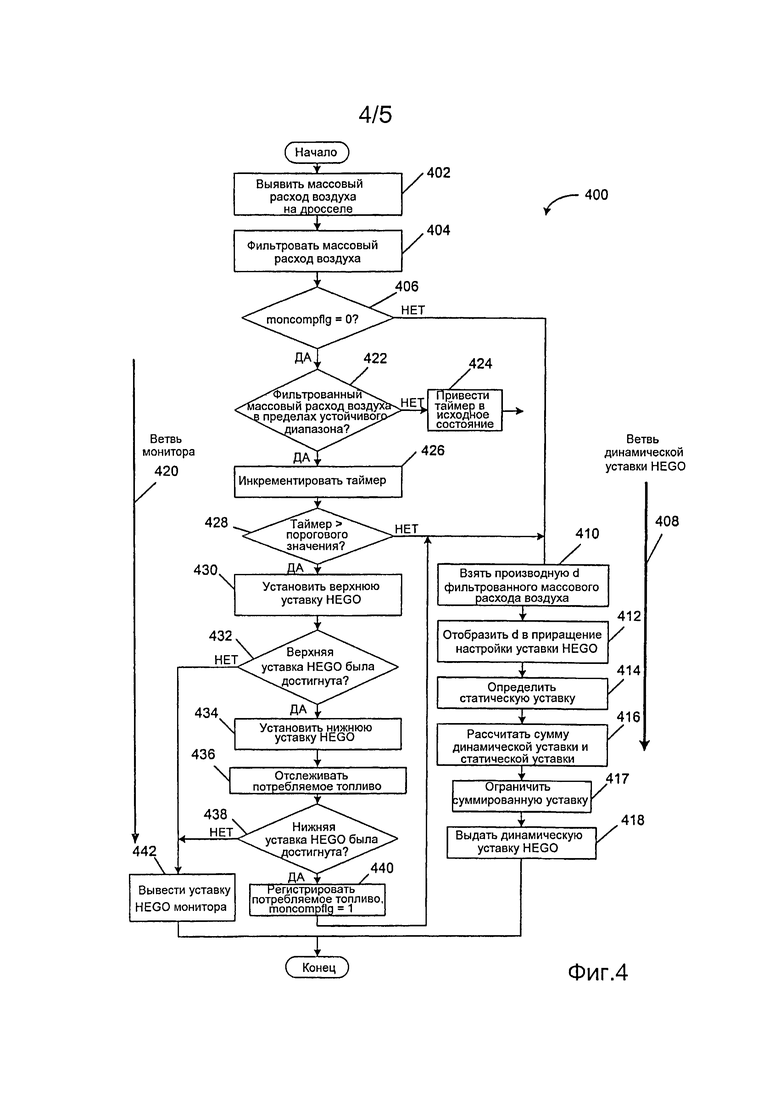
Способ 400 начинается выявлением массового расхода воздуха на дросселе на этапе 4 02 и фильтрацией такого массового расхода воздуха на этапе 404, с тем чтобы устранять небольшие колебания, которые не являются частью большой переходной массы воздуха. Этап 406 проверяет, была ли функция монитора каталитического нейтрализатора уже доведена до завершения для этого вождения (moncompflg = 1). Если доведена, то способ переходит на правую ветвь последовательности операций, идентифицированную стрелкой 4 08, где определение уставки HEGO выполняется на основании динамических режимов двигателя 10. В этом случае, если изменение массового расхода воздуха является достаточно значительным для пропускания через фильтр нижних частот, то скорость изменения рассчитывается на этапе 410 способа 400. Эта скорость изменения картируется на приращение настройки уставки HEGO на этапе 412 способа 400. Пример этого картирования (отображения в виде карты) показан на фиг. 3, на которой входной сигнал по горизонтальной оси X является производной d массового расхода воздуха, а выходной сигнал по вертикальной оси Y является динамической уставкой HEGO. Небольшие скорости изменения расхода воздуха, около начала координат осей X-Y, дают очень небольшие изменения уставки HEGO, чтобы избегать дрожания значения уставки HEGO; от средних до больших производных создают большие динамические уставки HEGO; но действительно чрезмерные производные достигают предела динамического изменения уставки HEGO, поскольку есть ограничение для линейного рабочего диапазона HEGO. Уставка HEGO, которая была рассчитана на основании статических входных условий, таких как число оборотов, нагрузка, температура двигателя и т.д., определяется на этапе 414. Приращение настройки уставки HEGO, определенное на этапе 412, затем добавляется к статической уставке HEGO на этапе 416 способа 400, для того чтобы определять динамический коэффициент настройки. Этап 417 является заключительным ограничением по сумме статических и динамических изменений уставки, чтобы гарантировать, что каталитический нейтрализатор не доводится до полного истощения или насыщения. На этапе 418 уставка HEGO основного контура делается имеющейся в распоряжении для 204, так что система регулирования топлива с обратной связью затем может использовать эту новую уставку HEGO.
Если на этапе 406 способа 400 определено, что монитор каталитического нейтрализатора не дошел до завершения (moncompflg = 0), способ идет дальше по левой ветви последовательности операций, идентифицированной как ветвь 420 монитора на фиг. 4. Эта ветвь контролирует кислородную накопительную способность каталитического нейтрализатора и является зависящей от усовершенствованного регулирования с обратной связью основного контура, так что напряжение HEGO не превышает верхнего или нижнего напряжения, что позволяло бы регулируемым выбросам проходить в выхлопную трубу. Эта ветвь последовательности операций является зависящей от двигателя 10, работающего в течение длительности проверки в относительно установившемся состоянии. Продолжая способ 400, на этапе 422 фильтрованный массовый расход на дросселе далее используется в качестве части проверки для определения того, устойчивы ли условия. Соответственно, текущий рассчитанный (по этапу 402 способа 400) массовый расход на дросселе оценивается для определения того, остается ли он в пределах приращения, или диапазона пороговых значений, выше или ниже фильтрованного текущего значения (по этапу 404 способа 400). Если определено, что массовый расход на дросселе не находится в пределах приращения фильтрованного массового расхода воздуха, таймер (подробнее описанный ниже) устанавливается в исходное состояние, и соблюдается ветвь 408 последовательности операций динамической уставки, описанная выше.
Однако если определено, что массовый расход воздуха на дросселе находится в пределах приращения фильтрованного массового расхода воздуха, таймер инкрементируется (временем приращения итерационного цикла) на этапе 426. На этапе 428 значение таймера сравнивается с пороговым значением времени для определения того, продвинулся ли таймер на достаточное время, указывая достаточную устойчивость массового расхода воздуха. Допущение небольших возмущений фильтрованных массовых расходов воздуха предоставляет монитору возможность потенциально работать, даже если двигатель не полностью находится в режиме работы с устойчивым состоянием. Если таймер не находится выше порогового значения, способ выжидает, чтобы начать процесс контроля и предоставляет динамической обработке уставки HEGO возможность продолжать выполняться. Если, на этапе 428 таймер достиг порогового значения, уставка HEGO устанавливается в верхнее значение на этапе 430, точнее, напряжение, указывающее, что каталитический нейтрализатор 70 находится возле истощения кислорода (но не достаточно высокого, чтобы позволить прорыв СО). Если определено, что верхняя уставка HEGO должна достигаться регулятором топлива с обратной связью, на этапе 432, то способ 400 переходит на этап 434, где уставка HEGO ступенчато изменяется до более низкого значения, что указывало бы, что каталитический нейтрализатор 70 находится возле насыщения кислородом. Если верхняя уставка HEGO не была достигнута, то способ переходит на 442 и отправляет верхнюю уставку HEGO в 204.
Величина пониженного топлива (от топлива, ожидаемого на основании оценок стехиометрии) отслеживается и накапливается в каждом итерационном цикле, так чтобы топливо, потребляемое для приведения в соответствие нижней уставке HEGO, определялось на этапе 436 способа 400. На этапе 438, если уставка еще не была достигнута, то способ переходит на этап 442, и нижняя уставка HEGO отправляется в определитель 204. Как только достигнута уставка, система возвращается к нормальному режиму вождения на этапе 440, например, устанавливая флаг проверки завершения монитора в 1. Если, по какой-либо причине, такой как вызванное водителем большое изменение дросселя, проверка прервана, то таймер устанавливается в исходное состояние и способ 400 запускается повторно. Величина пониженного топлива, необходимая для перемещения напряжения HEGO с верхней на нижнюю уставку напряжения, нормализуется относительно условий потока, а затем может сравниваться с известными (определенными автономно) результатами накопительной способности каталитического
нейтрализатора для нового, среднего, полностью состаренного и порогового (каталитического нейтрализатора, который превысил свой полный срок службы), таким образом вырабатывая показание текущей относительной накопительной способности каталитического нейтрализатора.
Соответственно, процедура, описанная в способе 400, проверяет готовность каталитического нейтрализатора по части его накопительной способности. Такая проверка (ожидаемая для проведения один раз за цикл вождения) может запускаться во время относительно устойчивых режимов двигателя, таких как холостой ход или крейсерское движение. Таким образом, во время выбранных состояний, уставка расположенного ниже по потоку датчика настраивается на время переходного процесса и независимо от условий эксплуатации в диапазоне в пределах максимального напряжения и минимального напряжения, идентифицируя ухудшение характеристик каталитического нейтрализатора на основании реакции на настройку уставки. Количество топлива, используемое для перехода от одной уставки HEGO к другой, может определяться для новых и старых каталитических нейтрализаторов, и на транспортном средстве может измеряться и сравниваться с этими показателями. Это преимущественно использует быстродействующее и устойчивое регулирование основного контура, обеспечиваемое профилированием амплитудно-частотной характеристики значений уставки и ошибки HEGO, как показано на фиг. 2, при котором требуемая уставка может достигаться быстро, без перерегулирования, достаточного для порождения выбросов.
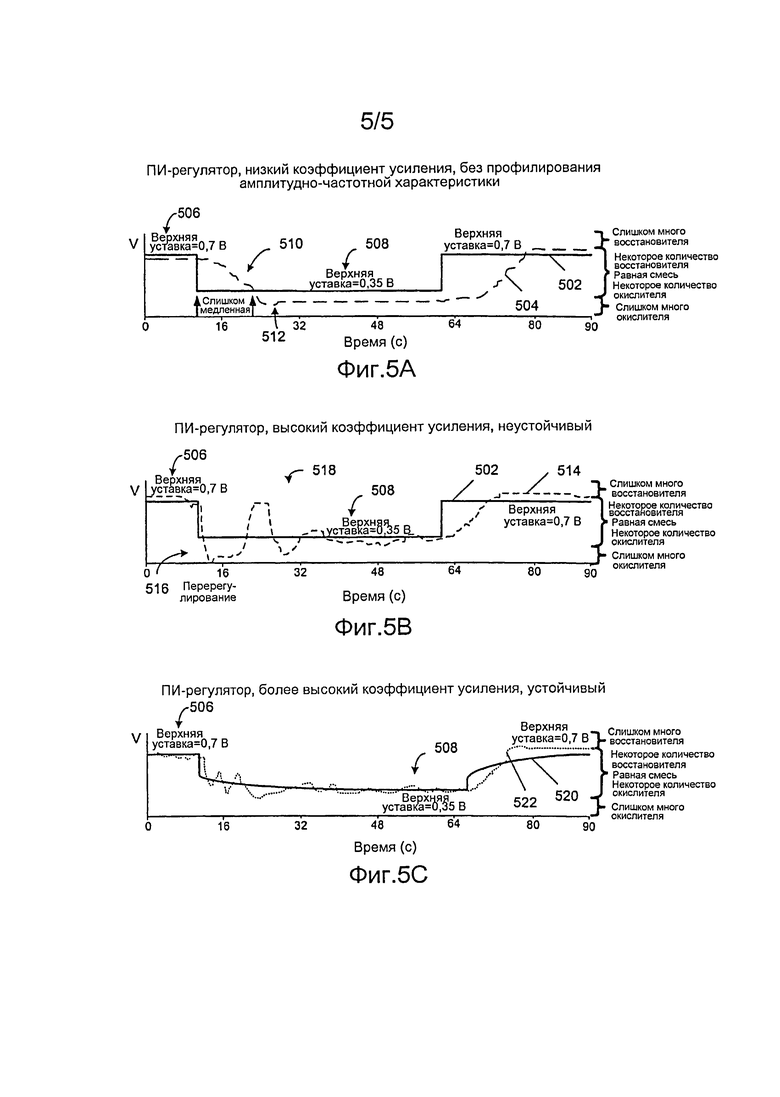
Фиг. 5А-5С показывает примеры регулирования уставки HEGO с использованием различных типов регуляторов. На каждой из фигур, линия 502 (и линия 52 0 на фиг. 5С) представляет команду для установки уставки HEGO, а линии 504, 514 и 522, соответственно, представляют реакцию напряжения HEGO на отработавшие газы после каталитического нейтрализатора. В каждом случае по фиг. 5А-5С, уставка HEGO ступенчато изменяется от 0,7 вольт на 506 (это указывает, что каталитический нейтрализатор 7 имеет запас кислорода на нижней границе своего диапазона - что есть большее количество восстановителей, чем окислителей, выходящих из каталитического нейтрализатора) до уставки 0,35 вольт на 508 (это указывает, что каталитический нейтрализатор 70 приближается к насыщению запаса кислорода - что есть большее количество окислителей, чем восстановителей, выходящих из каталитического нейтрализатора). Превышение этих напряжений в любом направлении дает в результате СО либо NOx, проходящих в выхлопную трубу.
Фиг. 5А - типичный пропорционально-интегральный (ПИ, PI) регулятор с низким коэффициентом усиления, который, как показано, имеет затруднительное реагирование на изменение команды как в показателях времени (510), так и перерегулирования (512). Практические ограничения настоящего раскрытия требуют, чтобы реакция возникала в пределах менее чем секунды, чтобы иметь эффект по выбросам и диагностике. Более того, перерегулирования по напряжению в обоих направлениях, указывающие, чтобы запас кислорода был насыщенным или истощенным в большей степени, чем намечено, в течение продолжительного периода времени. Повышение коэффициентов усиления ПИ-регулятора сколько-нибудь еще, для этого примера, будет делать перерегулирования только хуже.
Фиг. 5В повышает коэффициент усиления по сравнению с ПИ-регулятором по фиг. 5А. Нет никакого профилирования амплитудно-частотной характеристики уставки в регуляторе по фиг. 5В, для того чтобы добиваться уровня регулирования, хотя используется профилирование амплитудно-частотной характеристики ошибки. Этот график иллюстрирует, что даже если достигается достаточно быстрая реакция, поддержание уставки по-прежнему могло бы быть проблемой. Начальный выброс (516) и затухающий переходный процесс (518) вне рабочей области каталитического нейтрализатора 70 не благоприятны.
Фиг. 5С иллюстрирует реакцию каталитического нейтрализатора при использовании ПИ-регулятора с более высоким коэффициентом усиления, чем по фиг. 5А (5С имеет такой же коэффициент усиления ПИ-регулятора, как 5В), в котором профилируются амплитудно-частотные характеристики как ошибки, так и командных сигналов. Реакция на изменения уставки HEGO является быстрой и сохраняет каталитический нейтрализатор 70 в его относительно эффективной рабочей области. Криволинейная природа команды 520 указывает, что вызванная командой ступенька HEGO настраивается посредством фильтрации упреждения/отставания, при которой ступенька достигает только части полной ступени, а затем, экспоненциально приближается к окончательному значению. Величина ступеньки и скорость роста экспоненты основаны на динамических характеристиках системы с обратной связью.
Будет принято во внимание, что конфигурации и способы, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные вариации осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные вариации. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Объем настоящего раскрытия охватывает все новейшие и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы-изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в объем настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И ДИАГНОСТИКИ ДВИГАТЕЛЯ | 2015 |
|
RU2672550C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2015 |
|
RU2678609C2 |
| ДВУХСТАДИЙНОЕ ВОССТАНОВЛЕНИЕ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА | 2014 |
|
RU2669538C2 |
| СПОСОБ ДЛЯ ВЫХЛОПА ДВИГАТЕЛЯ, СИСТЕМА И СПОСОБ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2633329C2 |
| Способ и система для идентификации и уменьшения дисбаланса воздушно-топливного отношения | 2016 |
|
RU2720176C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РЕГУЛИРОВКИ ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ | 2012 |
|
RU2602025C2 |
| ДАТЧИК ВЛАЖНОСТИ ОТРАБОТАВШИХ ГАЗОВ И СПОСОБ РАБОТЫ ДВИГАТЕЛЯ | 2013 |
|
RU2628105C2 |
| СПОСОБЫ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2014 |
|
RU2663678C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КАТАЛИТИЧЕСКИМ НЕЙТРАЛИЗАТОРОМ С ОБРАТНОЙ СВЯЗЬЮ | 2017 |
|
RU2704902C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ВПРЫСКА ГАЗОВОГО ТОПЛИВА ВО ВРЕМЯ ТАКТА ВЫПУСКА ДЛЯ УМЕНЬШЕНИЯ ЗАПАЗДЫВАНИЯ ТУРБОНАГНЕТАТЕЛЯ | 2014 |
|
RU2642958C2 |



Настоящее изобретение относится к управлению выпуском двигателя с датчиками, предусмотренными как выше, так и ниже по потоку от каталитического нейтрализатора. Способ содержит настройку уставки для расположенного ниже по потоку датчика на основании скорости изменения массового расхода воздуха выше по потоку от двигателя и настройку впрыска топлива, чтобы регулировать топливо-воздушное соотношение (FAR) на расположенном ниже по потоку датчике по настроенной уставке и чтобы регулировать FAR отработавших газов на расположенном выше по потоку датчике по уставке расположенного выше по потоку датчика. Техническим результатом является предотвращение насыщения каталитического окислителя или восстановителя, снижение выбросов СО и NOx и улучшение экономии топлива. 4 н. и 14 з.п. ф-лы, 7 ил.
1. Способ управления выпуском двигателя с расположенным выше по потоку датчиком и расположенным ниже по потоку датчиком, содержащий этапы, на которых:
настраивают уставку для расположенного ниже по потоку датчика на основании скорости изменения массового расхода воздуха выше по потоку от двигателя;
сравнивают измеренное показание в отработавших газах от расположенного ниже по потоку датчика с уставкой для получения ошибки и определяют коррекцию обратной связи по этой ошибке с помощью контроллера обратной связи; и
настраивают впрыск топлива, чтобы регулировать топливовоздушное соотношение (FAR) отработавших газов на расположенном ниже по потоку датчике по настроенной уставке на основании коррекции обратной связи и чтобы регулировать FAR отработавших газов на расположенном выше по потоку датчике по уставке расположенного выше по потоку датчика,
причем расположенный выше по потоку датчик является широкодиапазонным датчиком кислорода, а расположенный ниже по потоку датчик является узкодиапазонным датчиком кислорода, причем настроенную уставку дополнительно настраивают посредством фильтра амплитудно-частотной характеристики, который подавляет более высокие частоты и пропускает более низкие частоты, и причем сравнение для получения ошибки определяют после применения фильтра амплитудно-частотной характеристики к настроенной уставке.
2. Способ по п. 1, в котором расположенный выше по потоку датчик является универсальным датчиком содержания кислорода в отработавших газах (UEGO), а расположенный ниже по потоку датчик является подогреваемым датчиком содержания кислорода в отработавших газах (HEGO), причем настройка уставки включает в себя картирование с помощью карты рассчитанной скорости изменения фильтрованного массового расхода воздуха на приращение настройки уставки HEGO, причем картирование содержит то, что меньшие скорости изменения массового расхода воздуха около начала координат осей X-Y дают меньшие изменения уставки HEGO, от средних до больших скоростей изменения массового расхода воздуха создают большие динамические изменения уставки HEGO, а еще большие скорости изменения массового расхода воздуха дают достижение предела динамического изменения уставки HEGO.
3. Способ по п. 2, в котором уставку для контура датчика UEGO снижают, когда количество восстановителей в отработавших газах, оцененное датчиком HEGO после каталитического нейтрализатора, превышает заданное пороговое значение, и уставку для контура датчика UEGO повышают, когда количество окислителей в отработавших газах, оцененное датчиком HEGO после каталитического нейтрализатора, превышает заданное пороговое значение.
4. Способ по п. 2, в котором уставку для контура датчика UEGO не изменяют, когда количество окислителей и восстановителей в отработавших газах, оцененное датчиком HEGO после каталитического нейтрализатора, не превышает заданного порогового значения.
5. Способ по п. 2, в котором уставку для контура датчика HEGO настраивают в ответ на изменение массового расхода двигателя.
6. Способ по п. 5, в котором уставку для контура датчика HEGO снижают, когда массовый расход двигателя быстро уменьшается, и уставку повышают, когда массовый расход двигателя быстро увеличивается.
7. Способ по п. 2, в котором уставку для контура датчика HEGO настраивают, когда скорость изменения массового расхода воздуха является большей, чем пороговое значение.
8. Способ по п. 7, дополнительно содержащий этап, на котором определяют рабочее состояние посредством выявления массового расхода воздуха на дросселе и пропускания выявленного массового расхода воздуха через фильтр нижних частот для получения фильтрованного массового расхода воздуха, причем первое рабочее состояние определяют, когда массовый расход воздуха находится в пределах диапазона пороговых значений фильтрованного массового расхода воздуха, и второе рабочее состояние определяют, когда массовый расход воздуха находится вне диапазона пороговых значений фильтрованного массового расхода воздуха.
9. Способ по п. 8, дополнительно содержащий этап, на котором во время первого состояния наращивают таймер, когда массовый расход воздуха определен находящимся в пределах диапазона пороговых значений фильтрованного массового расхода воздуха, и устанавливают уставку контура датчика HEGO на первое напряжение, когда таймер превышает пороговое значение времени.
10. Способ по п. 9, дополнительно содержащий этап, на котором во время первого состояния устанавливают уставку контура датчика HEGO на второе напряжение, при этом второе напряжение ниже, чем первое напряжение.
11. Способ по п. 8, дополнительно содержащий этап, на котором во время второго состояния рассчитывают скорость изменения фильтрованного массового расхода воздуха, картируют рассчитанную скорость изменения фильтрованного массового расхода воздуха на приращение настройки уставки HEGO, чтобы определять коэффициент настройки, настраивают статическую уставку на основании статических входных условий посредством коэффициента настройки и устанавливают уставку датчика HEGO в настроенную статическую уставку.
12. Способ управления выпуском двигателя с расположенным выше по потоку датчиком и расположенным ниже по потоку датчиком, содержащий этапы, на которых:
настраивают уставку для расположенного ниже по потоку датчика на основании скорости изменения массового расхода воздуха выше по потоку от двигателя;
сравнивают измеренное показание в отработавших газах от расположенного ниже по потоку датчика с уставкой для получения ошибки и определяют коррекциию обратной связи по этой ошибке с помощью контроллера обратной связи; и
настраивают впрыск топлива, чтобы регулировать топливовоздушное соотношение (FAR) отработавших газов на расположенном ниже по потоку датчике по настроенной уставке на основании коррекции обратной связи и чтобы регулировать FAR отработавших газов на расположенном выше по потоку датчике по уставке расположенного выше по потоку датчика,
причем сигнал управления для настройки уставки для расположенного ниже по потоку датчика пропускают через фильтр отставания-упреждения, и сигнал управления для настройки впрыска топлива пропускают через фильтр упреждения-отставания.
13. Способ управления впрыском топлива в двигателе, содержащий этапы, на которых:
определяют топливовоздушное соотношение (FAR) потока отработавших газов в первом контуре датчика кислорода, расположенного выше по потоку от каталитического нейтрализатора отработавших газов, и во втором контуре датчика кислорода, расположенного ниже по потоку от каталитического нейтрализатора отработавших газов;
определяют уставку ниже по потоку на основании условий эксплуатации;
настраивают уставку ниже по потоку на основании скорости изменения массового расхода воздуха выше по потоку от двигателя;
преобразуют настроенную уставку ниже по потоку в FAR;
определяют ошибку между настроенной уставкой FAR ниже по потоку и измеренным FAR ниже по потоку;
определяют уставку выше по потоку на основании этой определенной ошибки; и
настраивают впрыск топлива на основании уставки выше по потоку и измеренного FAR выше по потоку,
причем расположенный выше по потоку датчик является универсальным датчиком содержания кислорода в отработавших газах (UEGO), а расположенный ниже по потоку датчик является подогреваемым датчиком содержания кислорода в отработавших газах (HEGO), причем настройка уставки ниже по потоку включает в себя картирование с помощью карты рассчитанной скорости изменения фильтрованного массового расхода воздуха на приращение настройки уставки HEGO, причем картирование содержит то, что меньшие скорости изменения массового расхода воздуха около начала координат осей X-Y дают меньшие изменения уставки HEGO, от средних до больших скоростей изменения массового расхода воздуха создают большие динамические изменения уставки HEGO, а еще большие скорости изменения массового расхода воздуха дают достижение предела динамического изменения уставки HEGO.
14. Способ по п. 13, в котором уставку датчика HEGO снижают, когда массовый расход двигателя быстро уменьшается, и уставку датчика HEGO повышают, когда массовый расход двигателя быстро увеличивается.
15. Способ по п. 13, дополнительно содержащий этап, на котором определяют выбранное рабочее состояние посредством выявления массового расхода воздуха на дросселе и пропускания выявленного массового расхода воздуха через фильтр нижних частот для получения фильтрованного массового расхода воздуха, причем первое рабочее состояние определяют, когда массовый расход воздуха находится в пределах диапазона пороговых значений фильтрованного массового расхода воздуха, и второе рабочее состояние определяют, когда массовый расход воздуха находится вне диапазона пороговых значений фильтрованного массового расхода воздуха.
16. Способ по п. 13, дополнительно содержащий этап, на котором обрабатывают команду настройки уставки HEGO посредством фильтрации отставания-упреждения команды.
17. Способ диагностирования ухудшения характеристик каталитического нейтрализатора в двигателе, содержащий этапы, на которых:
определяют топливовоздушное соотношение (FAR) потока отработавших газов на универсальном датчике содержания кислорода в отработавших газах (UEGO), расположенном выше по потоку от каталитического нейтрализатора отработавших газов, и на подогреваемом датчике содержания кислорода в отработавших газах (HEGO), расположенном ниже по потоку от каталитического нейтрализатора отработавших газов;
настраивают уставку для контура датчика HEGO на основании скорости изменения массового расхода выше по потоку от двигателя;
настраивают впрыск топлива для регулирования FAR, чтобы оно соответствовало требуемым уставкам; и
во время выбранных состояний настраивают уставку расположенного ниже по потоку датчика на время переходного процесса и независимо от условий эксплуатации в диапазоне в пределах максимального напряжения и минимального напряжения, идентифицируя ухудшение характеристик каталитического нейтрализатора на основании реакции на настройку уставки.
18. Способ по п. 17, в котором первая настройка уставки и последняя настройка уставки смещены от максимального и минимального напряжений на по меньшей мере пороговую величину.
| US 5842340 A1, 01.12.1998 | |||
| US 20070234708 A1, 11.10.2007 | |||
| US 20030150209 A1, 14.08.2003 | |||
| US 6945033 B2, 20.09.2005 | |||
| US 5432701 A1, 11.07.1995 | |||
| МОБИЛЬНАЯ СИСТЕМА РЕГИСТРАЦИИ ВЫХЛОПНЫХ ГАЗОВ АВТОМОБИЛЯ И РАСХОДОМЕРНЫЙ МОДУЛЬ ДЛЯ НЕЕ | 1999 |
|
RU2224233C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ОТРАБОТАВШИХ ГАЗОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2094625C1 |

