Настоящее изобретение относится к области гидроакустики и предназначено для измерения скорости звука для проведения гидроакустических исследований и измерительных работ гидроакустической аппаратуры.
Все измерения в гидроакустике производятся с использованием оценки скорости звука. В.Н. Матвиенко, Ю.Ф. Тарасюк «Дальность действия гидроакустических средств». - Л., Судостроение, 1981 г.).
Существуют прямые и косвенные методы определения скорости распространения звука в воде. Косвенные методы предполагают предварительное измерение температуры воды и солености воды, и дальнейший расчет по известным номограммам скорости звука (В.А. Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане». СПб, «Наука» 2003 г. стр. 50-87).
Эти способы позволяют определять скорость звука по конкретным измерениям температуры и солености, которые могут быть произведены путем забора проб воды и проведения химического анализа при процедуре измерения температуры. Измерение производится с использованием специальных судов и стандартных океанографических измерительных средств, в которые входят глубоководный опрокидывающийся термометр, термометр-глубомер, батитермограф, а также комплексные гидрологические зонды. Количество параметров измеряемых зондом и измерительных каналов зависит от выполняемых им конкретных задач. Информация об измеренных параметрах передается в бортовые приборы по кабель-тросу. Недостатком этого метода является необходимость специализированного судна и длительная процедура измерения для получения оценки скорости звука по трассе.
Существуют прямые методы измерения скорости звука при использовании конкретных приборов, которые измеряют скорость звука на глубине нахождения с использованием интерферометрических методов, фазовых методов, импульсных методов и частотных методов. Эти приборы, как правило, устанавливаются на борту судна и измеряют скорость звука при погружении до определенной глубины. Для расчетов траекторий распространения сигналов используется таблицы, снятые для всех глубин и для всех морей и океанов, в которых указаны значения скоростей звука на различных глубинах. Как правило, эти значения являются устаревшими и не всегда соответствуют решаемым задачам, (стр. 98, там же). Есть разовые гидрофизические зонды, которые погружаются до дна и по мере погружения передают информацию о значении скорости звука на конкретной глубине. Этот способ является дорогим и затратным и не всегда может быть использован при решении конкретных задач для получения скорости звука по трассе.
Здесь надо учитывать то обстоятельство, что измерение скорости звука происходит в одной конкретной точке по глубине и считается, что такое же распределение скорости звука будет по всей трассе распространения сигнала на глубине измерения, что не всегда соответствует действительности. Практически никто не проводил измерение скорости звука по трассе ввиду сложности работ и трудности их сопоставления.
Известен способ измерения скорости звука по трассе с использованием взрывных источников излучения, который рассматривается в работе Роберт Дж. Урик. «Основы гидроакустики», Судостроение, Л., 1978 г., стр. 165-200.
Известен способ дистанционного измерения скорости звука с использованием гидроакустического канала (В.А. Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане» СПб, «Наука», 2003 г., стр. 149-153).
Способ содержит излучение зондирующего сигнала неподвижным источником, передачу по радиоканалу времени излучения, прием сигнала распространения неподвижным источником, определение скорости распространения сигнала по известной дистанции и времени распространения от момента прихода радиосигнала и момента прихода гидроакустического сигнала.
Недостатком такого способа является зависимость оценки скорости звука от точности измерения дистанции, необходимость радиоканала и гидроакустического канала одновременно.
Наиболее близким аналогом, который целесообразно принять за прототип, является способ измерения скорости звука по трассе по патенту РФ №2581416, который содержит излучение гидроакустического зондирующего сигнала неподвижным источником и прием зондирующего сигнала, излучение зондирующего сигнала производят через постоянные промежутки времени T, сохраняя длительность зондирующего сигнала постоянной, прием сигнала осуществляют приемным устройством, движущимся навстречу, определяют скорость V движения носителя приемного устройства, определяют время прихода первого зондирующего сигнала t1, определяют время прихода N-го зондирующего сигнала tN, а скорость звука между неподвижным источником зондирующего сигнала и подвижным носителем приемного устройства определяют по формуле: C=(N-1)VT/{t1-tN+(N-1)T}.
Недостатком данного способа является ошибка определения скорости звука, которая связана с погрешностью определения радиальной составляющей скорости сближения при известной скорости собственного движения. Эта ошибка обусловлена неизвестным значение курсового угла положения излучателя зондирующего сигнала.
Задачей изобретения является уменьшения погрешности измерения скорости звука по трассе.
Техническим результатом изобретения является повышение точности измерения скорости звука по трассе за счет автоматического определения пространственного положения излучателя зондирующего сигнала относительно направления движения приемника.
Для достижения указанного технического результата в способ измерения скорости звука, содержащий излучение зондирующего сигнала неподвижным источником через постоянные промежутки времени T, сохраняя длительность сигнала постоянной, прием сигнала осуществляют антенной приемного устройства, движущегося навстречу по траектории распространения сигнала, определение скорости V движения носителя приемного устройства, определение времени прихода первого зондирующего сигнала t1, определение времени прихода N-го зондирующего сигнала tN и определение скорости звука C, введены новые признаки, а именно прием сигнала распространения осуществляют антенной со статическим веером характеристик направленности с шириной характеристики направленности пространственного канала Δβ°, определяют номер пространственного канала Ni, в котором обнаружен сигнал с максимальной амплитудой, измеряют амплитуду максимального сигнала Ai, определяют амплитуды сигналов в соседних пространственных каналах, выбирают соседний пространственный канал Nj с наибольшей амплитудой Aj, скорость звука определяют по формуле C=(N-1)TVcosКУ°/{t1-tN+(N-1)T}, а курсовой угол КУ° источника зондирующего сигнала определяют по формуле  при j<i и
при j<i и  , если j>i, где Δβ° - ширина характеристики направленности пространственного канала.
, если j>i, где Δβ° - ширина характеристики направленности пространственного канала.
Наибольшую ошибку в определении скорости звука будет вносить различие в направлении движения приемника и истинным положением излучателя сигналов. Это известная зависимость определяется курсовым углом излучателя, который может быть определен с помощью статического веера характеристик направленности либо при наведении характеристики направленности на излучатель сигналов. Существующие методы определения курсового угла обнаруженного объекта работают относительно направления движения приемника сигналов. Относительно направления движения располагается приемная антенна, статические характеристики направленности которой ориентированы так, что по направлению движения расположена центральная характеристика направленности, относительно которой определяется курсовой угол обнаруженного источника зондирующего сигнала. Ширина характеристики направленности и определяет погрешность измерения курсового угла обнаруженного объекта. Если ширина характеристики направленности составляет, например, 8°, то это и будет определять погрешность оценки курсового угла объекта. Для более точного определения курсового угла объекта предлагается использовать соотношения между амплитудами эхо-сигнала, принятыми соседними характеристиками направленности. Поскольку характеристики направленности пересекаются на уровне 0,7 от максимума, то сигнал будет всегда обнаруживаться в двух характеристиках направленности с наибольшими амплитудами. Амплитуды сигналов будут определяться положением источника зондирующего сигнала относительно этих характеристик. Если в одной характеристики сигнал обнаруживается на максимуме характеристики, то амплитуда сигнала будет максимальной, а в соседней характеристике амплитуда сигнала будет меньше. Таким образом, по соотношению амплитуд можно автоматически оценивать курсовой угол обнаруженного объекта внутри характеристики направленности и тем самым повысить точность определения курсового угла при приеме практически одного сигнала.
Если курсовой угол источника сигналов известен, то радиальная составляющая сближения приемника и излучателя будет равна

и тогда окончательно можно получить оценку скорости звука при измерении времени приема зондирующих сигналов неподвижным источником. Скорость звука

В качестве неподвижных источников зондирующих сигналов могут использоваться автономные гидроакустические маяки. Они могут устанавливаться как на дне, и тогда это будет скорость распространения акустической энергии с поверхности и до дна, так и на фиксированной глубине, что будет определять скорость распространения звука в пространстве по дистанции и до известной глубины.
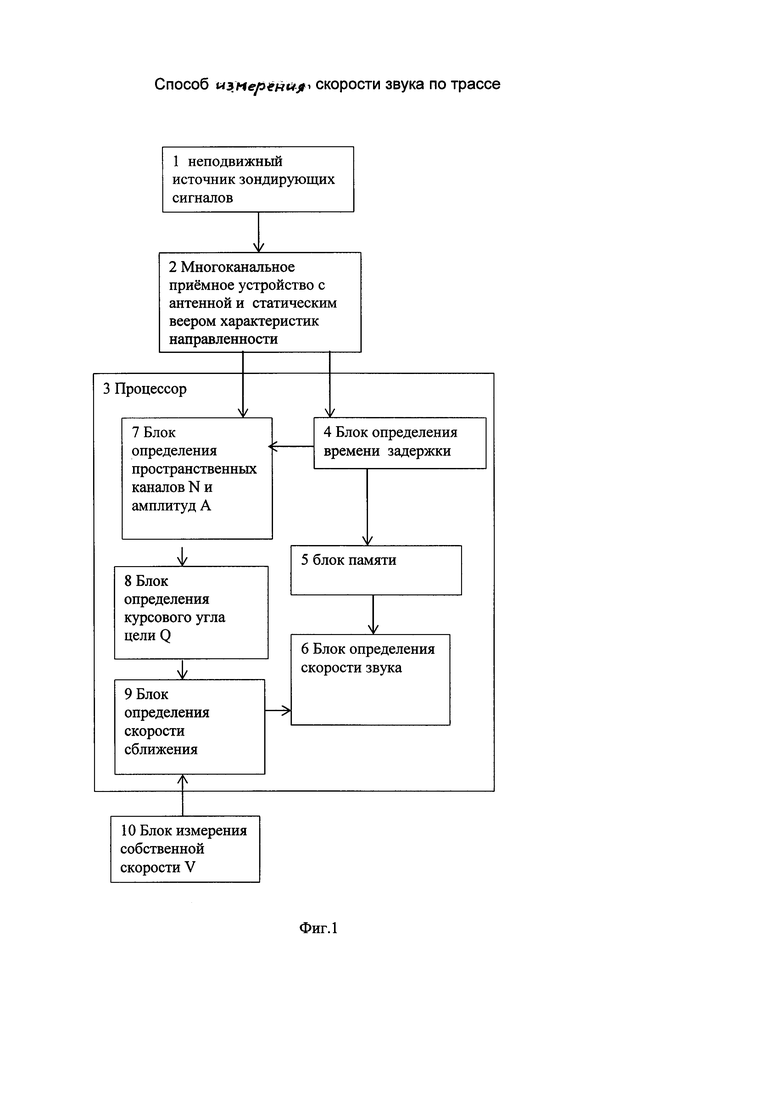
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема устройства, реализующего заявленный способ.
Устройство (фиг. 1) содержит неподвижный источник 1 зондирующих сигналов, и установленные на движущемся объекте многоканальное приемное устройство 2, в состав которого входит антенна, имеющая статический веер характеристик направленности, процессор 3 и блок 10 измерения собственной скорости V. В состав процессора 3 входят последовательно соединенные блок 4 определения времени задержек, блок 5 памяти, блок 6 определения скорости звука, а также последовательно соединенные блок 7 определения пространственных каналов N и амплитуд A, блок 8 определения курсового угла цели Q, блок 9 определения скорости сближения. Первый и второй выходы блока 2 соединены со входами блока 7 и блока 4, соответственно, а второй выход блока 4 соединен со вторым входом блока 7, выход блока 9 соединен со вторым входом блока 6, а выход блока 10 соединен со вторым входом блока 9.
Неподвижный источник зондирующих сигналов 1 является известным устройством, в качестве которого может быть использован автономный маяк ответчик, который может быть установлен в любой точке и на любой глубине. Такой маяк является разовым устройством и его включение осуществляется либо по команде, либо в определенное время (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства», Санкт-Петербург, 2009 г. Изд. ЛЭТИ, стр. 10-40). Антенна и многоканальное приемное устройство 2 являются известными устройствами, которые подробно описаны в отечественной литературе (А.С. Колчеданцев «Гидроакустические станции». Судостроение Л., 1982 г., А.Н. Яковлев, Г.П. Кабаков «Гидролокаторы ближнего действия» Судостроение Л. 1983 г.). Блок измерения 4 времен прихода является известным устройством, который может быть реализован по схеме одноканального цифрового обнаружителя (стр. 107 А.Н. Яковлев, Г.П. Кабаков «Гидролокаторы ближнего действия»). Блок 4 измерения разности времен, блок 5 памяти и блок 6 определения скорости звука, блок 7 определения пространственных каналов, блок 8 определения курсового угла и блок 9 определения скорости сближения являются стандартными процедурами цифровой вычислительной техники и могут быть реализованы программным образом на любых вычислительных средствах. Все блоки, используемые для определения скорости звука, могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа приемных трактов современных гидролокационных станций. Это стандартные спецпроцессоры, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб., «Наука», 2004 г., с. 281-289). Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов, СПб, «БХВ - Петербург», 2011 г.). Гидроакустический измеритель собственной скорости движения блок 10 является известным устройством, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства», Санкт Петербург, 2009 г. Изд. ЛЭТИ, стр. 40-81).
Реализация предложенного способа с помощью устройства (фиг. 1) осуществляется следующим образом. Неподвижный источник зондирующих сигналов 1 излучает короткие сигналы с постоянной заранее известной частотой повторения, что определяет интервал T между сигналами. Сигнал распространяется в водной среде и принимается антенной приемного устройством 2 со статическим веером характеристик направленности, преобразуется в электрический сигнал, усиливается, фильтруется и передается в блок 4 измерения времен прихода. В блоке 4 определяется момент превышения амплитудой принятого сигнала порогового уровня. Излучаемые зондирующие сигналы являются сигналами прямого распространения и имеют большую амплитуду, поэтому приемные устройства не решают задачу повышения отношения сигнал помеха. Практически для любых принятых сигналов на выходе приемного устройства будет наблюдаться большое отношение сигнал/помеха при измерениях по переднему фронту. Измеренное значение времени запоминаются в блоке 5 в цифровом виде и поступает в блок 6 для определения скорости звука. В блок 7 определяются пространственные каналы и измеренные амплитуды, по которым в блоке 9 определяется курсовой угол источника сигналов, в блоке 9 определяется скорость сближения по оценке собственной скорости, измеренной в блоке 10. Скорость звука в блоке 6 определяется с учетом скорости сближения, определенной по данным блока 8 и блока 10.
Точность измерения интервала между излучениями, измеренная современными методами, может быть достаточно высокой и составлять величину порядка <1 мс. Точность измерения скорости движения современными измерителями составляет величину меньше 0,01 м/с (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства», Санкт Петербург, 2009 г. Изд. ЛЭТИ, стр. 48). В этих условиях ошибка оценки скорости звука при двух последовательных измерениях за счет ошибки скорости движения будет в пределах 1 м/с.
Таким образом, предложенная процедура измерения последовательных временных интервалов позволяет уменьшить погрешность определения скорость распространения звука по трассе с использованием неподвижного излучателя зондирующих сигналов, установленного в любом месте, и подвижного приемника с антенной, имеющей статический веер характеристик направленности за счет автоматической оценки курсового угла источника зондирующего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скорости звука | 2021 |
|
RU2776959C1 |
| Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели | 2017 |
|
RU2650829C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА | 2015 |
|
RU2581416C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| Способ обработки гидролокационной информации | 2017 |
|
RU2657121C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2014 |
|
RU2553726C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2012 |
|
RU2516602C1 |
Изобретение относится к гидроакустике, в частности к средствам измерения скорости звука. Способ измерения скорости звука по трассе заключается в излучении зондирующего сигнала неподвижным источником через постоянные промежутки времени Т, сохраняя длительность сигнала постоянной. Осуществляют прием сигнала антенной приемного устройства, движущегося навстречу по траектории распространения сигнала. Определяют скорость V движения носителя приемного устройства, время прихода первого зондирующего сигнала t1, время прихода N-го зондирующего сигнала tN и скорость звука С. Прием сигнала осуществляют антенной со статическим веером характеристик направленности с шириной характеристики направленности пространственного канала Δβ°, определяют номер пространственного канала Ni, в котором обнаружен сигнал с максимальной амплитудой, измеряют амплитуду максимального сигнала Ai, определяют амплитуды сигналов в соседних пространственных каналах, выбирают соседний пространственный канал Nj с наибольшей амплитудой Aj, скорость звука определяют по формуле С=(N-1)TVcosКУ°/{t1-tN+(N-1)Т}, а курсовой угол КУ° источника зондирующего сигнала определяют по формуле  при j<i и
при j<i и  , если j>i, где Δβ° - ширина характеристики направленности пространственного канала. Технический результат – повышение точности измерений. 1 ил.
, если j>i, где Δβ° - ширина характеристики направленности пространственного канала. Технический результат – повышение точности измерений. 1 ил. 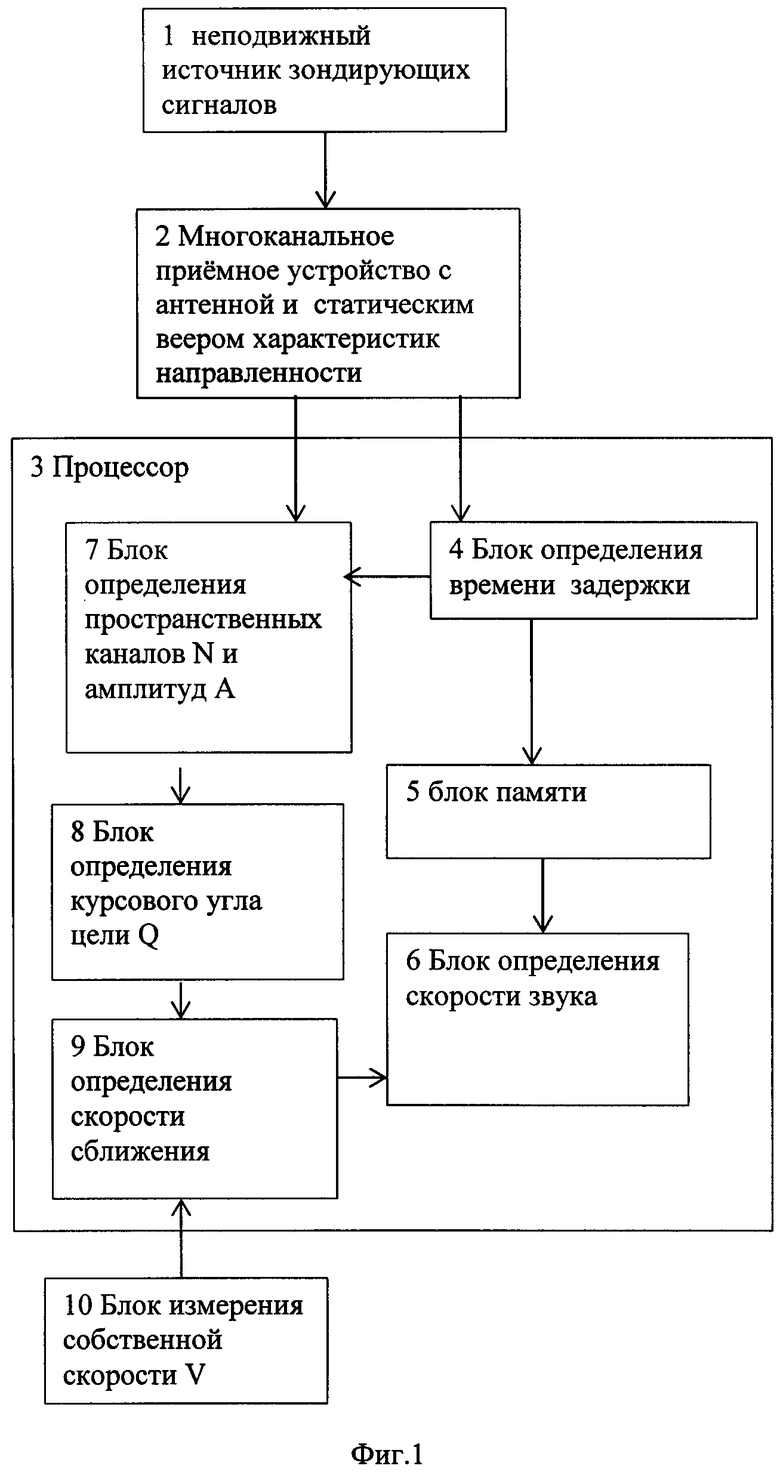
Способ измерения скорости звука по трассе, содержащий излучение зондирующего сигнала неподвижным источником через постоянные промежутки времени Т, сохраняя длительность сигнала постоянной, прием сигнала осуществляют антенной приемного устройства, движущегося навстречу по траектории распространения сигнала, определение скорости V движения носителя приемного устройства, определение времени прихода первого зондирующего сигнала t1, определение времени прихода N-го зондирующего сигнала tN и определение скорости звука С, отличающийся тем, что прием сигнала распространения осуществляют антенной со статическим веером характеристик направленности с шириной характеристики направленности пространственного канала Δβ°, определяют номер пространственного канала Ni, в котором обнаружен сигнал с максимальной амплитудой, измеряют амплитуду максимального сигнала Ai, определяют амплитуды сигналов в соседних пространственных каналах, выбирают соседний пространственный канал Nj с наибольшей амплитудой Aj, скорость звука определяют по формуле С=(N-1)TVcosКУ°/{t1-tN+(N-1)Т}, а курсовой угол КУ° источника зондирующего сигнала определяют по формуле  при j<i и
при j<i и  , если j>i, где Δβ° - ширина характеристики направленности пространственного канала.
, если j>i, где Δβ° - ширина характеристики направленности пространственного канала.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА | 2015 |
|
RU2581416C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ КУРСОВОГО УГЛА ДВИЖЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ | 2013 |
|
RU2545068C1 |
| СПОСОБ АДАПТИВНОЙ ОБРАБОТКИ СИГНАЛА ШУМОИЗЛУЧЕНИЯ | 2014 |
|
RU2561010C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| US 5400300 A1, 21.03.1995 | |||
| US 6577557 B1, 10.06.2003 | |||
| WO 1990000729 A1, 25.01.1990. | |||

