Настоящее изобретение относится к области гидроакустики и предназначено для определения скорости звука по трассе распространения гидроакустических сигналов, что необходимо для работы гидролокаторов освещения подводной обстановки, а также для проведения исследований и измерительных работ с использованием гидроакустической аппаратуры.
Существуют прямые и косвенные методы определения скорости распространения звука в воде. Косвенные методы предполагают предварительное измерение температуры и солености воды и дальнейший расчет скорости звука по известным номограммам. (В.А. Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане» СПб. «Наука» 2003 г. стр. 50 - 87). Эти способы позволяют определять скорость звука по конкретным измерениям температуры и солености, которые могут быть произведены при процедуре измерения температуры путем забора проб воды и проведения химического анализа. Измерение производится с использованием специальных судов и стандартных океанографических измерительных средств, в которые входят глубоководный опрокидывающийся термометр, термометр-глубомер, батитермограф, а также комплексные гидрологические зонды. Количество параметров, измеряемых зондом, и измерительных каналов зависит от выполняемых конкретных задач. Информация об измеренных параметрах передается в бортовые приборы по кабель-тросу. Недостатком этих методов является необходимость специализированного судна и длительная процедура измерения.
Существуют прямые методы измерения скорости звука при использовании приборов, которые измеряют скорость звука на глубине нахождения с использованием интерферометрических методов, фазовых методов, импульсных методов и частотных методов. Эти приборы, как правило, устанавливаются на борту судна и измеряют скорость звука при погружении до определенной глубины. Этот способ является дорогим и затратным и не всегда может быть использован при решении конкретных задач.
Известен способ определения скорости звука по патенту РФ №2515125 опубликован 10.05.2014 г.
Способ содержит излучение зондирующего сигнала, прием отраженного сигнала, измерение скорости звука на глубине излучения и прием гидроакустической антенной, имеющей статический веер характеристик направленности, оси которых разнесены на углы не меньше чем 2°, сигнал, отраженный от дна, принимают двумя парциальными ХН, оси которых отстоят от нормали не менее чем на 40°, измеряют угол между осями этих ХН, измеряют моменты времени прихода отраженных от дна обоих принятых эхосигналов T1 и Т2 и по измеренному углу и по полученному отношению времен последовательно рассчитывают значение скорости звука вблизи дна.
Данным способом определяется скорость звука вблизи дна, что необходимо для обеспечения работы многолучевого эхолота при вертикальном распространении зондирующего сигнала. Такой способ не позволяет определить скорость звука по трассе при горизонтальном распространения зондирующего сигнала, что необходимо при эхолокационном обнаружении подводных объектов.
Известен способ измерения скорости звука по патенту РФ №2581416, опубликованному 20.04.2016. В соответствии с этим способом излучают зондирующий сигнал неподвижным источником. Излучение зондирующего сигнала производят через постоянные промежутки времени Т, сохраняя длительность зондирующего сигнала постоянной. Прием эхосигнала осуществляют приемным устройством, движущимся по траектории распространения зондирующего сигнала навстречу, определяют скорость V движения носителя приемного устройства, определяют время прихода первого зондирующего сигнала t1, определяют время прихода N-го зондирующего сигнала tN, а скорость звука С между неподвижным источником зондирующего сигнала и подвижным носителем приемного устройства определяют по формуле: С=(N-1)VT/{t1-tN+(N-1)Т}.
Недостатком указанного способа является необходимость установки в районе работы неподвижного источника излучения зондирующего сигнала, что не всегда выполнимо.
Известен способ определения скорости звука по патенту РФ №2631234, опубликованному 19.09.2017, по количеству общих признаков, являющийся наиболее близким аналогом предлагаемого изобретения.
В соответствии со способом прототипом производят излучение зондирующего сигнала, прием эхосигналов гидроакустической антенной со статическим веером характеристик направленности, измерение времени распространения сигналов. При этом излучают первый и второй последовательные зондирующие сигналы через интервал времени Т в направлении неподвижного объекта, прием эхо-сигналов осуществляют статическим веером характеристик направленности в горизонтальном направлении, фиксируют моменты времени излучения первого и второго сигнала tиз1 и tиз2 и приема первого и второго эхосигналов tпр1, tпр2, измеряют разность времен распространения первого и второго последовательных эхо-сигналов (tпр1 - tиз1) - (tпр2 - tиз2), измеряют скорость собственного движения носителя гидролокатора Vсоб, определяют курс носителя К°, на каждой из посылок определяют направление на неподвижный объект П°, на каждой из посылок определяют угол между направлением движения носителя и направлением на неподвижный объект или курсовой угол q°=(К°-П°), и, если qк°=qп° и меньше 10°, определяют скорость сближения или радиальную составляющую собственной скорости носителя относительно положения неподвижного объекта по формуле Vсб=Vсобcosq°, а скорость звука по трассе определяют по формуле Сзв=2Vсобcosq°T/{(tпр1 - tиз1)-(tпр2 - tиз2)}, при этом время между посылками определяют из условия Т>100 м/Vсоб. Для обеспечения малой погрешности измерения времени используются зондирующие сигналы короткой длительности.
Недостатком данного способа является то, что он может быть использован при работе гидролокатора только при наличии неподвижного отражателя. Кроме того, для реализации способа необходима высокая точность измерения времени прихода эхосигнала, что обеспечивается использованием коротких зондирующих сигналов. Поэтому при использовании длительных зондирующих сигналов этот способ не применим.
Задачей изобретения является расширение возможностей измерения скорости звука по трассе распространения зондирующего сигнала большой длительности.
Технический результат заключается в обеспечении возможности измерения скорости звука по трассе зондирующего сигнала в процессе обнаружения цели гидролокатором сигналом без использования неподвижного отражателя.
Для достижения указанного технического результата в способ, содержащий излучение зондирующего сигнала на частоте Fиз, прием эхосигнала гидроакустической антенной со статическим веером характеристик направленности, измерение угла Q между направлением движения носителя гидролокатора и направлением на цель Q=(К°-П°), где К1° курс носителя гидролокатора, П° направление на цель, измерение собственной скорости движения Vн носителя гидролокатора введены новые признаки, а именно измеряют частоту принятого эхосигнала от обнаруженной цели Fпр1, определяют разность частот ΔF1=Fиз - Fпр1, измеряют угол Q1 обнаруженной цели между направлением движения носителя гидролокатора и направлением на цель при первом излучении, изменяют направление собственного движения носителя гидролокатора, излучают второй зондирующий сигнал в новом направлении движения носителя гидролокатора, измеряют частоту принятого эхосигнала Fпр2 и измеряют новый угол цели Q2 между направлением движения носителя гидролокатора и направлением на цель при втором зондирующем сигнале, определяют разность частот принятых эхосигналов ΔF2=Fиз - Fпр2 и определяют скорость звука по формуле 
Сущность предлагаемого технического решения заключается в следующем.
В работе Дж. Уоррен Хортон «Основы гидролокации» Судпромгиз. 1960 г. стр. 453 приведено соотношение между величиной изменения частоты эхосигнала к частоте излучения в зависимости от отношения скорости сближения (удаления) цели к скорости звука  где Fиз - частота излученного сигнала, Fпр - частота принятого сигнала, С - скорость звука, V величина скорости сближения или удаления цели относительно излучателя. При этом величина V будет определяться радиальной составляющей скорости носителя гидролокатора по направлению на цель и радиальной составляющей скорости цели по направлению на носитель гидролокатора. Поэтому можно написать V=VРЦ+VнcosQ, где VРЦ - радиальная составляющая скорости цели по направлению на носитель гидролокатора, которая нам не известна. VнcosQ - радиальная составляющая скорости носителя гидролокатора Vн по направлению на цель, если угол между направлением движения носителя гидролокатора и направлением на цель Q. Эта составляющая известна, поскольку скорость Vн определяется по измерителю скорости (ЛАГу), а угол Q как разность между курсом носителя гидролокатора и пеленгом на цель, который определяется по направлению приема эхосигнала статическим веером характеристики направленности приемной антенны. Для измерения скорости звука необходимо сделать две посылки. Первая посылка производится в результате штатной работы гидролокатора при обнаружении цели. Тогда будет получена радиальная составляющая VнcosQ1 и измерена частота Fпр1. После этого следует изменить курсовой угол собственного движения
где Fиз - частота излученного сигнала, Fпр - частота принятого сигнала, С - скорость звука, V величина скорости сближения или удаления цели относительно излучателя. При этом величина V будет определяться радиальной составляющей скорости носителя гидролокатора по направлению на цель и радиальной составляющей скорости цели по направлению на носитель гидролокатора. Поэтому можно написать V=VРЦ+VнcosQ, где VРЦ - радиальная составляющая скорости цели по направлению на носитель гидролокатора, которая нам не известна. VнcosQ - радиальная составляющая скорости носителя гидролокатора Vн по направлению на цель, если угол между направлением движения носителя гидролокатора и направлением на цель Q. Эта составляющая известна, поскольку скорость Vн определяется по измерителю скорости (ЛАГу), а угол Q как разность между курсом носителя гидролокатора и пеленгом на цель, который определяется по направлению приема эхосигнала статическим веером характеристики направленности приемной антенны. Для измерения скорости звука необходимо сделать две посылки. Первая посылка производится в результате штатной работы гидролокатора при обнаружении цели. Тогда будет получена радиальная составляющая VнcosQ1 и измерена частота Fпр1. После этого следует изменить курсовой угол собственного движения  что приведет к изменению Q2 и радиальную составляющую VнcosQ2 и измерить принятую частоту Fпр2 Таким образом, полная относительная скорость сближения (удаления) по первой посылки будет равна VОT1=VРЦ+VнcosQ1, а по второй посылке VOT2=VРЦ+VнcosQ2.
что приведет к изменению Q2 и радиальную составляющую VнcosQ2 и измерить принятую частоту Fпр2 Таким образом, полная относительная скорость сближения (удаления) по первой посылки будет равна VОT1=VРЦ+VнcosQ1, а по второй посылке VOT2=VРЦ+VнcosQ2.
Теперь можно составить два уравнения.
Для первой посылки  обозначим ΔF1=Fиз - Fпр1.
обозначим ΔF1=Fиз - Fпр1.
Для второй посылки  обозначим ΔF2=Fиз - Fпр2.
обозначим ΔF2=Fиз - Fпр2.
Для первого уравнения 
Для второго уравнения 
Получим  .
.
Решение этой системы уравнений позволяет получить скорость звука
 .
.
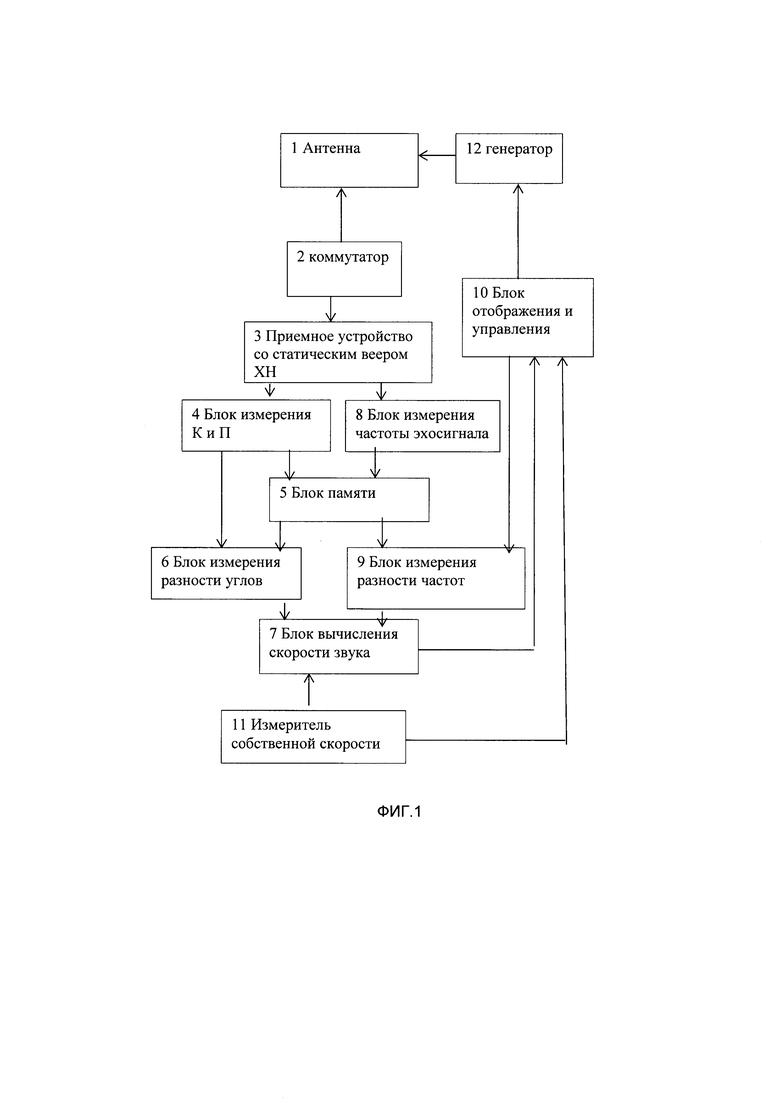
Сущность изобретения поясняется фиг. 1, на которой приведено устройство измерения скорости звука.
Устройство (фиг. 1)содержит излучающую антенну 1, последовательно соединенные коммутатор 2, приемное устройство 3 со статическим веером характеристики направленности, блок 4 измерения К и П, блок 5 памяти, блок 6 измерения разности углов, блок 7 вычисления скорости звука, блок 10 отображения и управления, и через блок 12 генератором со входом Второй выход приемного устройства последовательно соединен через с блок 8 измерения частоты эхосигнала, через второй вход блока памяти 5 с входом блока 9 измерении разности частот и далее со вторым входом блока 7 вычисления скорости звука, второй выход которого соединен с блоком управления и отображения 10. Третий вход блока 7 измерителя скорости звука соединен с блоком измерителя собственной скорости 11, второй выход которого соединен с блоком 10 отображения и управления. Второй выход блока 10 соединен со вторым входом блока 9 измерения разности частот.
Реализацию предлагаемого способа целесообразно рассмотреть на примере работы устройства фиг. 1.
Работа устройства происходит следующим способом. Из блока 10 отображения и управления подается сигнал на генератор 12, где формируется зондирующий сигнал на частоте Fиз и передается на антенну 1 на излучение, одновременно из блока 10 передается значение частоты излучения в блок 9 измерения разности частот. Антенна излучает зондирующий сигнал на выбранной частоте и принимает отраженный от объекта эхосигнал, который через коммутатор 2 подается в приемное устройством 3, которое имеет статический веер характеристик направленности.
По номеру характеристики направленности определяется пеленг П на обнаруженный объект, а по положению центральной характеристики направленности курс гидролокатора К. Эти данные поступают в блок 4 по каждому зондирующему сигналу. Одновременно из приемного устройства 3 обнаруженный эхосигнал поступает в блок 8 измеритель частоты эхосигнала. Измерение частоты эхосигнала является стандартной процедурой, которая используется при цифровой обработке с помощью процедуры быстрого преобразования Фурье (БПФ). Это известный способ обработки эхосигнала достаточно подробно описан в литературе (Л.М. Гольденберг, Б.Д.Матюшкин, М.Н. Поляк «Цифровая обработка сигналов» М. Радио и связь. 1985 г). Измеренная частота эхосигнала поступает в блок памяти 5, на второй вход которого поступают измеренные значения курса К гидролокатора и пеленга П на обнаруженную цель. В блоке 6 производится измерение разности углов, а в блоке 9 измерение разности частот, которые поступают в блок 7 измерители скорости звука. На третий вход блока 7 поступает оценка собственной скорости из блока 11, значение которой так же передается в блок 10 для отображения. В блоке 10 формируется команда на изменение курса гидролокатора и проведение второго излучение зондирующего сигнала на этой же частоте. Принятый второй эхосигнал обрабатывается гидролокатором, производится повторное измерение курса и пеленга с определением разности углов, повторное измерение частоты принятого эхосигнала, определение разности частот и передача в блок 7 для вычисления скорости звука, значение которого передается в блок 10 для отображения и использования в гидрологических и акустических расчетах.
Антенна 1, коммутатор 2, генератор 12, являются известными устройствами, которые подробно описаны в отечественной литературе А.С. Колчеданцев. «Гидроакустические станции». Судостроение Л. 1982 г., А. Н. Яковлев, Г.П. Кабаков «Гидролокаторы ближнего действия» Судостроение Л. 1983 г. В состав гидролокатора, как правило, входят антенна с системой формирования характеристик направленности, приемное устройство, передающее устройство, индикатор и система управления.
Все блоки, используемые для определения скорости звука, могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа приемных трактов современных гидролокационных станций и которые используются в прототипе. Это стандартные спецпроцессоры, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» СПб. «Наука» 2004 г. с. 281 - 289). Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко «Цифровая обработка сигналов» СПб. «БХВ - Петербург» 2011 г.). Гидроакустический измеритель собственной скорости движения блок 11 является известным устройством, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства» Санкт Петербург 2009 г. Изд. ЛЭТИ стр. 40 - 81). Блок 10 управления и отображения известное устройство, которое содержится во всех гидролокаторах и которое обеспечивает отображение и управление результатов работы гидролокаторов.
Таким образом, используя два зондирующих сигнала, излучение которых разнесены по времени при изменении направления движения носителя гидролокатора, можно определить скорость звука по трассе по подвижной цели в процессе ее обнаружения, что свидетельствует о достижении заявленного технического результата
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| Способ измерения дистанции гидролокатором до неподвижного объекта | 2022 |
|
RU2801678C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| Способ определения вертикального угла положения подводного объекта | 2023 |
|
RU2810693C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели | 2017 |
|
RU2650829C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДА | 2014 |
|
RU2559159C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2015 |
|
RU2612201C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ С ИСПОЛЬЗОВАНИЕМ ВЗРЫВНОГО СИГНАЛА | 2013 |
|
RU2546852C1 |
Использование: настоящее изобретение относится к области гидроакустики и предназначено для определения скорости звука по трассе распространения гидроакустических сигналов, что необходимо для работы гидролокаторов освещения подводной обстановки, а также для проведения исследований и измерительных работ с использованием гидроакустической аппаратуры. Сущность: способ определения скорости звука содержит излучение зондирующего сигнала на частоте Fиз, прием эхосигнала гидроакустической антенной со статическим веером характеристик направленности, измерение угла Q между направлением движения носителя гидролокатора и направлением на цель Q = (К1°-П°), где К1° - курс носителя гидролокатора, П° - направление на цель, измерение собственной скорости движения Vн носителя гидролокатора, измеряют частоту принятого эхосигнала от обнаруженной цели Fпрl, определяют разность частот ΔF1=Fиз - Fпр1, измеряют угол Q1 обнаруженной цели между направлением движения носителя гидролокатора и направлением на цель при первом излучении, изменяют направление собственного движения носителя гидролокатора, излучают второй зондирующий сигнал в новом направлении движения носителя гидролокатора, измеряют частоту принятого эхосигнала Fпр2 и измеряют новый угол цели Q2 между направлением движения носителя гидролокатора и направлением на цель при втором зондирующем сигнале, определяют разность частот принятых эхосигналов ΔF2=Fиз - Fпр2 и определяют скорость звука по формуле  . Технический результат: обеспечение возможности измерения скорости звука по трассе зондирующего сигнала в процессе обнаружения цели гидролокатором сигналом без использования неподвижного отражателя. 1 ил.
. Технический результат: обеспечение возможности измерения скорости звука по трассе зондирующего сигнала в процессе обнаружения цели гидролокатором сигналом без использования неподвижного отражателя. 1 ил.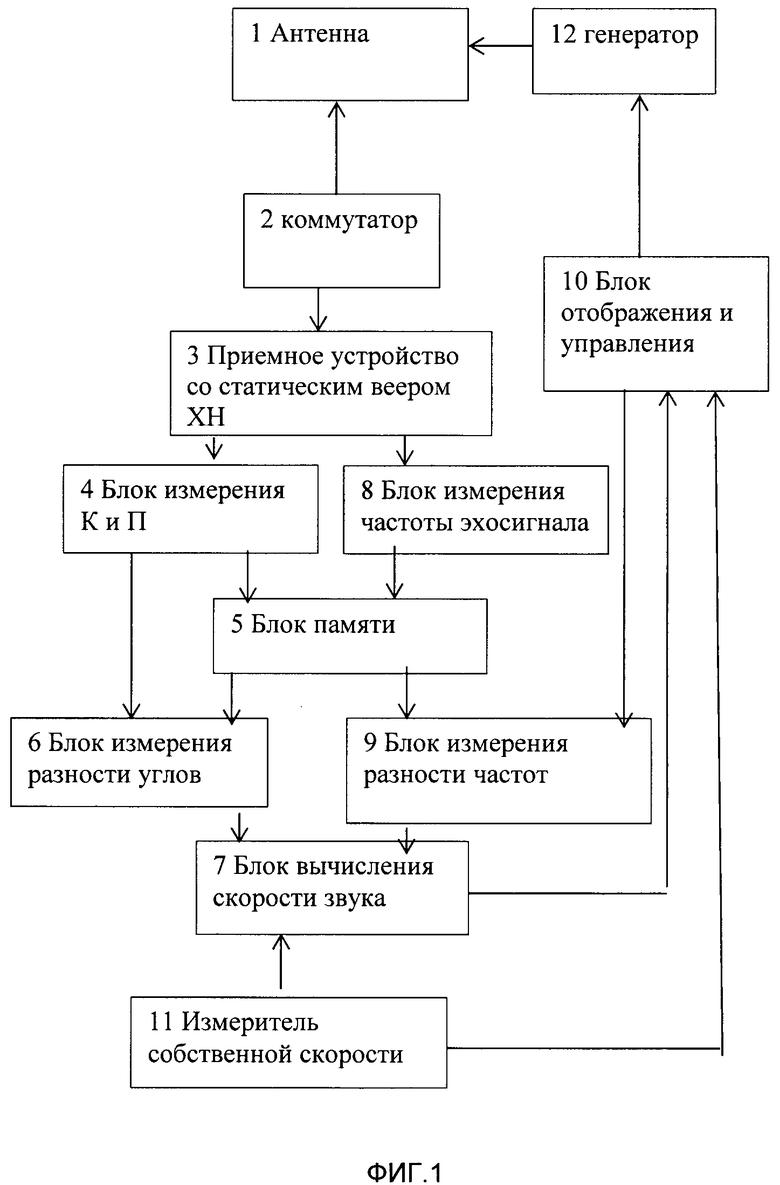
Способ определения скорости звука, содержащий излучение зондирующего сигнала на частоте Fиз, прием эхосигнала гидроакустической антенной со статическим веером характеристик направленности, измерение угла Q между направлением движения носителя гидролокатора и направлением на цель Q=(К1°-П°), где К1° - курс носителя гидролокатора, П° - направление на цель, измерение собственной скорость движения Vн носителя гидролокатора, отличающийся тем, что измеряют частоту принятого эхосигнала от обнаруженной цели Fпр1, определяют разность частот ΔF1=Fиз - Fпр1, измеряют угол Q1 обнаруженной цели между направлением движения носителя гидролокатора и направлением на цель при первом излучении, изменяют направление собственного движения носителя гидролокатора, излучают второй зондирующий сигнал в новом направлении движения носителя гидролокатора, измеряют частоту принятого эхосигнала Fпр2 и измеряют новый угол цели Q2 между направлением движения носителя гидролокатора и направлением на цель при втором зондирующем сигнале, определяют разность частот принятых эхосигналов ΔF2=Fиз - Fпр2 и определяют скорость звука по формуле 
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА ПО ТРАССЕ | 2016 |
|
RU2625716C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОБЪЕМНОГО РАССЕЯНИЯ ЗВУКА В ОКЕАНИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2012070C1 |
| Способ измерения вертикального распределения скорости звука в воде | 2015 |
|
RU2613485C2 |
| EP 1393025 A2, 03.03.2004. | |||

