Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления для устройства передачи динамической мощности, включающего в себя двигатель, электрогенератор и электромотор.
2. Описание предшествующего уровня техники
[0002] Публикация заявки на патент (Япония) номер 2014-113895 описывает силовую передачу гибридного транспортного средства, включающую в себя гибридное приводное устройство и 4-скоростную автоматическую трансмиссию. Гибридное приводное устройство выполнено с возможностью сцеплять двигатель и электрогенератор с дифференциальным механизмом, управлять частотой вращения двигателя посредством электромотора, усиливать крутящий момент двигателя, выводить крутящий момент двигателя из дифференциального механизма, приводить в действие электромотор посредством электрической мощности, генерируемой посредством электрогенератора, и суммировать выходной крутящий момент электромотора с крутящим моментом, выводимым из дифференциального механизма. Электрогенератор и электромотор электрически соединены с устройством накопления электричества, и когда величина электрической мощности, генерируемой посредством электрогенератора, превышает величину электрической мощности, которая должна потребляться посредством электромотора, устройство накопления электричества заряжается избыточной электрической мощностью. Дополнительно, устройство, описанное в JP 2014-113895 А, выполняет проскальзывание муфты, предоставленной на выходной стороне электромотора, и в силу этого потребляет избыточную энергию.
Сущность изобретения
[0003] Когда избыточная энергия потребляется посредством проскальзывания муфты, ограничение величины генерирования электричества в электрогенераторе снижается на величину, эквивалентную потребленной энергии. Следовательно, подавление выходной мощности двигателя ослабляется, и снижение крутящего момента может компенсироваться посредством электрогенератора. Тем не менее, как описано в JP 2014-113895 А, когда энергия потребляется посредством трения муфты, энергия преобразуется в тепло, и следовательно, имеется вероятность того, что температура муфты увеличивается, а долговечность снижается. Дополнительно, если величина генерирования электричества в электрогенераторе ограничивается для поддержания долговечности муфты, крутящий момент от электрогенератора ограничивается в дополнение к ограничению выходной мощности двигателя, и следовательно, имеется вероятность того, что приводной крутящий момент для движения транспортного средства является недостаточным.
[0004] Изобретение предоставляет устройство управления, которое может надлежащим образом управлять приводным крутящим моментом без вызывания таких недостатков, как снижение долговечности устройства передачи динамической мощности, даже когда заряд ограничивается.
[0005] Предусмотрено устройство управления для устройства передачи динамической мощности согласно аспекту изобретения. Устройство передачи динамической мощности включает в себя дифференциальный механизм, электрогенератор, электромотор и гидродинамическую муфту. Дифференциальный механизм выполнен с возможностью разделять динамическую мощность, выводимую посредством двигателя, на ведущее колесо и в электрогенератор. Электрогенератор выполнен с возможностью генерировать электрическую мощность таким образом, что электромотор приводится в действие посредством электрической мощности, и крутящий момент электромотора выводится на ведущее колесо, и заряжать устройство накопления электричества частью электрической мощности. Электромотор располагается в позиции, разнесенной от тракта передачи, вдоль которого динамическая мощность двигателя передается на ведущее колесо через дифференциальный механизм. Гидродинамическая муфта располагается между электромотором и трактом передачи. Устройство управления включает в себя электронный блок управления. Электронный блок управления выполнен с возможностью ограничивать заряд устройства накопления электричества с помощью электрической мощности, генерируемой посредством электрогенератора, в зависимости от состояния устройства накопления электричества. Электронный блок управления выполнен с возможностью дифференциально вращать гидродинамическую муфту и приводить в действие электромотор посредством электрической мощности таким образом, что потери динамической мощности формируются в гидродинамической муфте, при ограничении заряда устройства накопления электричества.
[0006] Здесь, "случай, в котором заряд устройства накопления электричества с помощью генерируемой электрической мощности ограничивается", включает в себя случай, в котором заряд ограничивается, поскольку устройство накопления электричества уже заряжено большим количеством электрической мощности, и следовательно, заряжаемое значение электрической мощности меньше предварительно определенного значения, случай, в котором даже если заряжаемое значение электрической мощности является большим, электрическая мощность, которая должна генерироваться, превышает заряжаемое значение электрической мощности, когда электрогенератор управляется для удовлетворения требуемой приводной мощности, и т.п.
[0007] В устройстве управления согласно вышеуказанному аспекту, электронный блок управления может быть выполнен с возможностью управлять крутящим моментом электромотора таким образом, что мощность, которая составляет мощность, выводимую посредством двигателя, и посредством которой устройство накопления электричества не может заряжаться, равна мощности для потерь динамической мощности посредством дифференциального вращения гидродинамической муфты.
[0008] Дополнительно, в устройстве управления согласно вышеуказанному аспекту, электронный блок управления может быть выполнен с возможностью управлять крутящим моментом электромотора таким образом, что сумма крутящего момента, который должен передаваться на ведущее колесо через тракт передачи, и крутящего момента, который должен передаваться в тракт передачи через гидродинамическую муфту, максимизируется, когда двигатель выводит предварительно определенную мощность.
[0009] В устройстве управления согласно вышеуказанному аспекту, дифференциальный механизм включает в себя первый вращательный элемент, второй вращательный элемент и третий вращательный элемент, причем дифференциальный механизм выполнен с возможностью осуществлять дифференциальное действие с первым вращательным элементом, вторым вращательным элементом и третьим вращательным элементом, причем первый вращательный элемент принимает крутящий момент двигателя, второй вращательный элемент соединен с электрогенератором, третий вращательный элемент выводит крутящий момент на ведущее колесо, и гидродинамическая муфта выполнена с возможностью суммировать крутящий момент из электромотора с крутящим моментом, выводимым из третьего вращательного элемента.
[0010] В устройстве управления согласно вышеуказанному аспекту, в случае если заряд устройства накопления электричества с помощью электрической мощности, генерируемой посредством электрогенератора, ограничивается в состоянии, в котором двигатель приводится в действие, частота вращения электромотора увеличивается, и динамическая мощность потребляется посредством гидродинамической муфты. Следовательно, ослабляется ограничение генерирования электричества посредством электрогенератора и реактивного крутящего момента посредством электрогенератора. В силу этого, в достаточной степени увеличивается крутящий момент двигателя, который должен выводиться через дифференциальный механизм.
[0011] В этом случае, крутящий момент электромотора управляется таким образом, что избыточная мощность, с помощью которой не может быть заряжено устройство накопления электричества, равна мощности потерь. За счет этого, можно подавлять чрезмерное потребление мощности.
[0012] Дополнительно, в состоянии, в котором двигатель выводит предварительно определенную мощность, величина дифференциального вращения гидродинамической муфты и выходной крутящий момент электромотора управляются таким образом, что максимизируется сумма крутящего момента двигателя, который должен передаваться на ведущее колесо, и крутящего момента электромотора, который должен передаваться на ведущее колесо через гидродинамическую муфту. Следовательно, можно обеспечивать в достаточной степени приводной крутящий момент для движения.
Краткое описание чертежей
[0013] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является принципиальной схемой, показывающей примерную зубчатую передачу устройства передачи динамической мощности (гибридного транспортного средства), которое представляет собой объект управления устройства управления согласно изобретению;
Фиг. 2 является блок-схемой для описания системы управления для гибридного транспортного средства;
Фиг. 3 является таблицей, совместно показывающей состояния зацепления/расцепления первой муфты, второй муфты и тормоза в каждом режиме движения гибридного транспортного средства и функцию каждого мотор-генератора;
Фиг. 4 является коллинеарной схемой, показывающей рабочее состояние в гибридном режиме;
Фиг. 5 является блок-схемой последовательности операций способа для описания примерного управления, которое выполняется посредством устройства управления согласно изобретению;
Фиг. 6 является линейной схемой, показывающей взаимосвязь баланса между мощностью и крутящим моментом;
Фиг. 7 является схемой, показывающей модель для описания вычисления, которое выполняется посредством устройства управления в варианте осуществления изобретения;
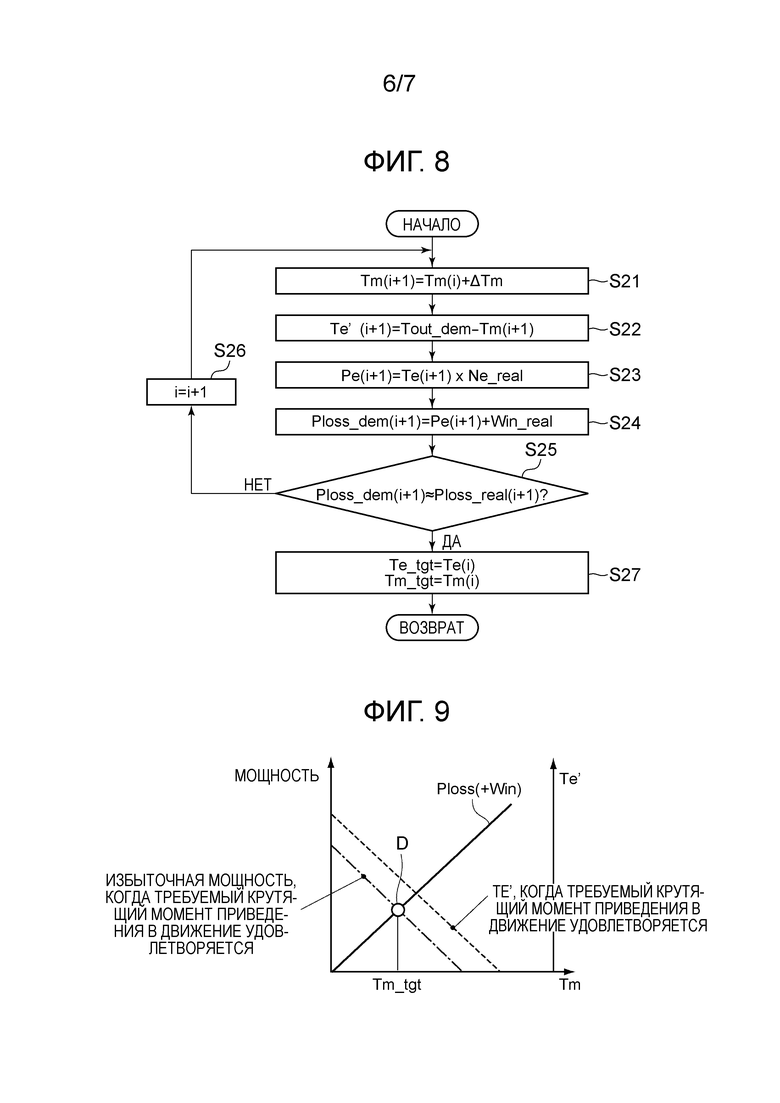
Фиг. 8 является блок-схемой последовательности операций способа для описания примерного управления оценкой целевых крутящих моментов двигателя и второго мотор-генератора;
Фиг. 9 является схемой, показывающей взаимосвязь крутящего момента второго мотор-генератора, мощности двигателя и прямого крутящего момента передачи; и
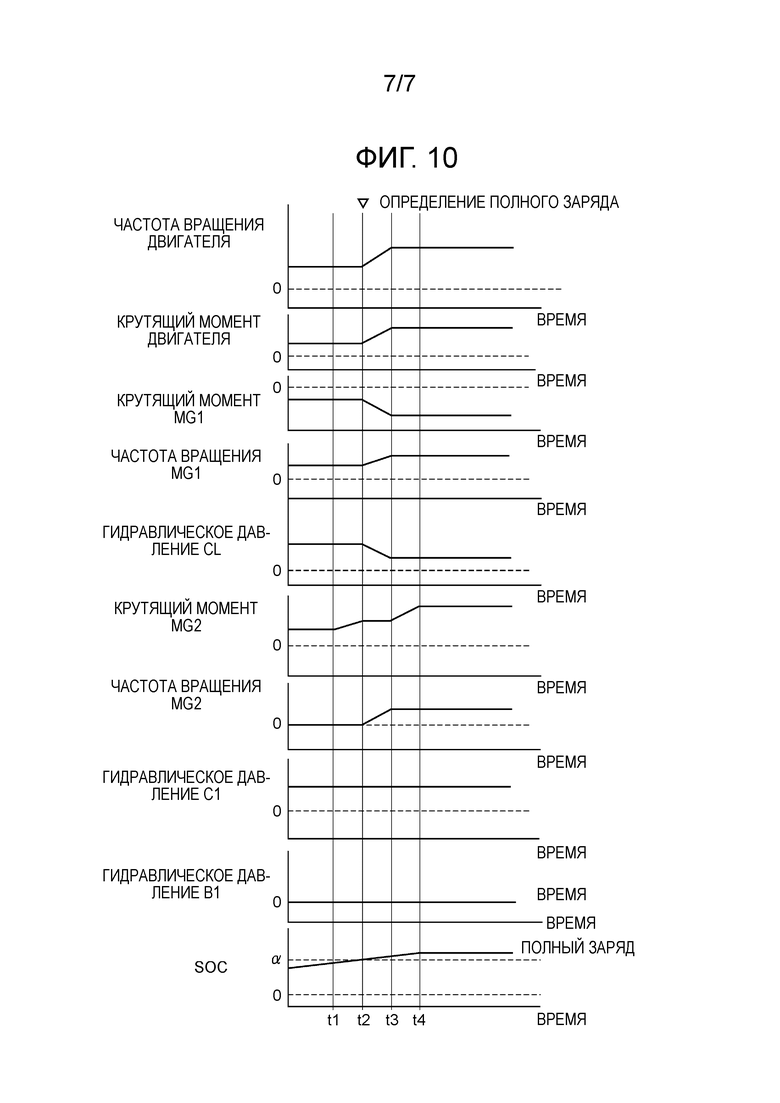
Фиг. 10 является временной диаграммой, показывающей изменения частоты вращения второго мотор-генератора, гидравлического давления блокировочной муфты и т.п. в случае, если устройство управления согласно изобретению осуществляет управление, когда транспортное средство остановлено при подготовке к началу движения в гибридном режиме.
Подробное описание вариантов осуществления
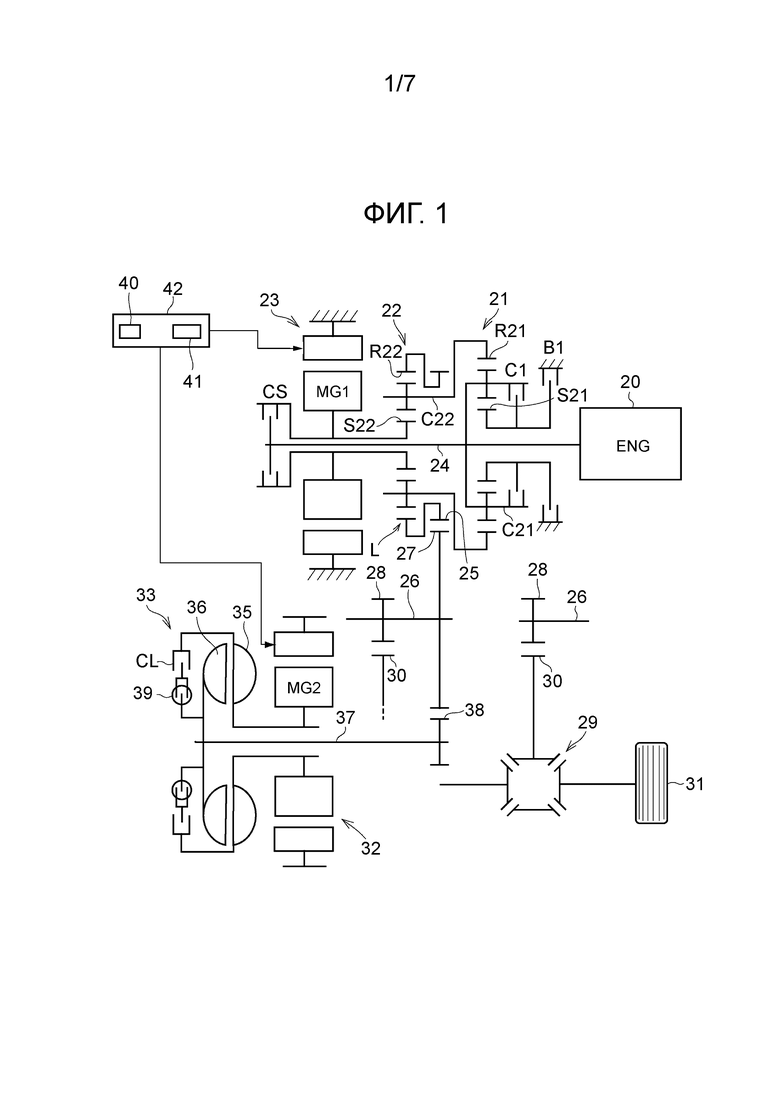
[0014] Фиг. 1 показывает примерную кинематическую схему устройства передачи динамической мощности гибридного транспортного средства, которое управляется посредством устройства управления в изобретении. На идентичной осевой линии с двигателем 20 (ENG), механизм 21 повышающей передачи, механизм 22 разделения динамической мощности и первый мотор-генератор 23 (MG1) располагаются в порядке со стороны двигателя 20. Двигатель 20 представляет собой двигатель внутреннего сгорания, к примеру, бензиновый двигатель и дизельный двигатель. Механизм 21 повышающей передачи представляет собой механизм для увеличения частоты вращения выходного вала таким образом, что частота вращения выходного вала выше частоты вращения двигателя, и в примере, показанном на фиг. 1, сконфигурирован посредством планетарной зубчатой передачи односателлитного типа. Следовательно, механизм 21 повышающей передачи включает в себя солнечную шестерню S21, коронную шестерню R21, расположенную на концентрической окружности для солнечной шестерни S21, и водило C21, удерживающее, с возможностью вращения и поворота, сателлит-шестерню, зацепленную с солнечной шестерней S21 и коронной шестерней R21. Водило C21 соединено с входным валом 24, на который передается динамическая мощность из двигателя 20. Дополнительно, предусмотрена первая муфта C1 для того, чтобы избирательно сцеплять солнечную шестерню S21 и водило C21, и тормоз B1 для того, чтобы избирательно фиксировать солнечную шестерню S21. Следовательно, посредством зацепления муфты C1, механизм 21 повышающей передачи переключается на так называемую ступень прямого соединения (низкую), на которой весь механизм 21 повышающей передачи вращается объединенным образом, и передаточное отношение механизма 21 повышающей передачи становится равным 1. Напротив, когда вращение солнечной шестерни S21 прекращается посредством зацепления тормоза B1, частота вращения коронной шестерни R21 становится выше частоты вращения водила C21, и механизм 21 повышающей передачи переключается на так называемую ступень повышающей передачи (высокую), на которой передаточное отношение ниже 1. Дополнительно, когда как первая муфта C1, так и тормоз B1 зацепляются, весь механизм 21 повышающей передачи стопорится, и вращение двигателя 20 также прекращается. Кроме того, когда как первая муфта C1, так и тормоз B1 расцепляются, солнечная шестерня S21 переходит в состояние свободного вращения, и следовательно, механизм 21 повышающей передачи не выполняет передачу крутящего момента.
[0015] Вышеуказанная коронная шестерня R21 представляет собой выходной элемент и передает динамическую мощность в механизм 22 разделения динамической мощности. В примере, показанном на фиг. 1, механизм 22 разделения динамической мощности, который соответствует дифференциальному механизму в варианте осуществления изобретения, сконфигурирован посредством планетарной зубчатой передачи односателлитного типа. Следовательно, механизм 22 разделения динамической мощности включает в себя три вращательных элемента: солнечную шестерню S22, коронную шестерню R22, расположенную на концентрической окружности для солнечной шестерни S22, и водило C22, удерживающее, с возможностью вращения и поворота, сателлитную шестерню, зацепленную с солнечной шестерней S22 и коронной шестерней R22. Водило C22 соединено с коронной шестерней R21 механизма 21 повышающей передачи. Выходной элемент механизма 22 разделения динамической мощности представляет собой коронную шестерню R22, и коронная шестерня R22 соединена с выходной шестерней 25. Солнечная шестерня S22 соединена с первым мотор-генератором 23, и солнечная шестерня S22 представляет собой реактивный элемент. Первый мотор-генератор 23 соответствует электрогенератору в варианте осуществления изобретения.
[0016] Солнечная шестерня S22 объединяется с валом солнечной шестерни, и входной вал 24 проходит с возможностью вращения через внутреннюю часть вала солнечной шестерни. Затем предусмотрена вторая муфта CS для того, чтобы избирательно сцеплять входной вал 24 и солнечную шестерню S22. Вторая муфта CS представляет собой муфту для задания последовательного режима, как описано ниже.
[0017] Промежуточный вал 26 располагается параллельно входному валу 24, и на промежуточном валу 26 ведомая шестерня 27 и ведущая шестерня 28 предоставляются таким образом, что они вращаются объединенным образом. Ведомая шестерня 27 зацепляется с вышеописанной выходной шестерней 25. Дополнительно, ведущая шестерня 28 зацепляется с коронной шестерней 30 дифференциала 29, который представляет собой шестерню последней ступени. Приводная мощность передается из дифференциала 29 на правое и левое ведущие колеса 31. Последовательность шестерен из ведомой шестерни 27 и ведущей шестерни 28 составляет редукторный механизм. Тракт L, вдоль которого динамическая мощность передается из вышеуказанной выходной шестерни 25 на ведущие колеса 31 через промежуточный вал 26 и дифференциал 29, соответствует тракту передачи в варианте осуществления изобретения. Здесь, на фиг. 1, для удобства иллюстрации, ведущая шестерня 28 и дифференциал 29 перемещены и описаны справа на фиг. 1.
[0018] Второй мотор-генератор 32, который соответствует электромотору в варианте осуществления изобретения, располагается параллельно входному валу 24 и промежуточному валу 26. Кроме того, гидродинамическая муфта 33 располагается на идентичной осевой линии со вторым мотор-генератором 32. Гидродинамическая муфта 33 включает в себя блокировочную муфту CL. Следовательно, второй мотор-генератор 32 и гидродинамическая муфта 33 предоставляются в позициях, отличных от вышеописанного тракта передачи. Гидродинамическая муфта 33 выполнена с возможностью располагать рабочее колесо 35 насоса, которое представляет собой элемент на приводящей стороне, и рабочее колесо 36 турбины, которое представляет собой элемент на приводимой стороне, таким образом, что они обращены друг к другу, и передавать крутящий момент между рабочим колесом 35 насоса и рабочим колесом 36 турбины посредством подачи спирального потока жидкости (или масла), сформированного посредством рабочего колеса 35 насоса, в рабочее колесо 36 турбины. Блокировочная муфта CL располагается параллельно с рабочим колесом 35 насоса и рабочим колесом 36 турбины. Затем рабочее колесо 35 насоса соединяется со вторым мотор-генератором 32. Дополнительно, вал 37 турбины, объединенный с рабочим колесом 36 турбины, проходит через центральную часть второго мотор-генератора 32 и идет в сторону ведомой шестерни 27. Затем другая ведущая шестерня 38, зацепленная с ведомой шестерней 27, присоединяется к валу 37 турбины.
[0019] Блокировочная муфта CL сконфигурирована посредством муфты, которая передает крутящий момент посредством механического сцепления рабочего колеса 35 насоса или элемента, объединенного с рабочим колесом 35 насоса, и рабочего колеса 36 турбины или элемента, объединенного с рабочим колесом 36 турбины, и она гидравлически управляется таким образом, что перегрузочная способность по передаваемому крутящему моменту непрерывно изменяется. Здесь, амортизатор 39 предоставляется последовательно с блокировочной муфтой CL. Дополнительно, гидродинамическая муфта 33 и блокировочная муфта CL могут представлять собой традиционно известный преобразователь крутящего момента с блокировочной муфтой.
[0020] Посредством вышеописанного механизма 22 разделения динамической мощности, динамическая мощность (мощность), выводимая посредством двигателя 20, разделяется на сторону первого мотор-генератора 23 и сторону выходной шестерни 25. В этом случае, первый мотор-генератор 23 выступает в качестве электрогенератора и за счет этого предоставляет реактивный крутящий момент для солнечной шестерни S22. Как результат, крутящий момент двигателя усиливается посредством механизма 22 разделения динамической мощности и выводится из выходной шестерни 25. Крутящий момент двигателя иногда называется прямым крутящим моментом передачи, и прямой крутящий момент передачи передается на ведущие колеса 31 через тракт L передачи. Другими словами, крутящий момент, выводимый посредством двигателя 20, не прикладывается к гидродинамической муфте 33. Следовательно, гидродинамическая муфта небольшого размера, имеющая небольшую емкость, может приспосабливаться в качестве гидродинамической муфты 33.
[0021] Электрическая мощность, генерируемая посредством первого мотор-генератора 23, подается во второй мотор-генератор 32. Второй мотор-генератор 32 выступает в качестве электромотора, и выходной крутящий момент суммируется с крутящим моментом, выводимым из выходной шестерни 25, в ведомой шестерне 27. Следовательно, мотор-генераторы 23, 32 электрически соединены через блок 42 источника электрической мощности, включающий в себя инвертор 40 и устройство 41 накопления электричества. Здесь, мотор-генераторы 23, 32, в качестве примера, сконфигурированы посредством трехфазных синхронных электромоторов.
[0022] Фиг. 2 является блок-схемой, показывающей систему управления для вышеприведенного гибридного транспортного средства. Предусмотрены электронное устройство 43 управления мотор-генератором (MG-ECU) для того, чтобы управлять мотор-генераторами 23, 32, и электронное устройство 44 управления двигателем (ENG-ECU) для того, чтобы управлять двигателем 20. Электронные устройства 43, 44 управления сконфигурированы в основном посредством микрокомпьютеров и выполнены с возможностью осуществлять вычисления на основе множества входных сигналов или множества входных данных и выводить результаты вычисления в качестве сигналов команд управления. MG-ECU 43, в основном, выполнен с возможностью управлять соответствующими электрическими токами (электрическим током MG1, электрическим током MG2) в первом мотор-генераторе 23 и втором мотор-генераторе 32. Дополнительно, ENG-ECU 44, в основном, выполнен с возможностью выводить, в двигатель 20, позиционный сигнал дросселя с электронным управлением для командования позицией электронного дроссельного клапана (не проиллюстрирован) двигателя 20 и сигнал зажигания для командования зажиганием и распределением зажигания.
[0023] Предусмотрено гибридное электронное устройство 45 управления (HV-ECU), которое выводит сигналы команд управления в электронное устройство 43, 44 управления и, кроме того, осуществляет управление зацеплением/расцеплением вышеописанных муфт C1, CS, CL и тормоза B1 и управление перегрузочной способностью по передаваемому крутящему моменту. Аналогично вышеописанному электронному устройству 43, 44 управления, HV-ECU 45 сконфигурирован в основном посредством микрокомпьютера и выполнен с возможностью осуществлять вычисления на основе множества входных сигналов или множества входных данных и выводить результаты вычисления в качестве сигналов команд управления. Примеры данных, которые должны быть введены, включают в себя скорость транспортного средства, позицию акселератора, обнаруживаемые данные посредством датчика частоты вращения для первого мотор-генератора (MG1), обнаруживаемые данные посредством датчика частоты вращения для второго мотор-генератора (MG2), обнаруживаемые данные посредством датчика частоты вращения для выходного вала (например, вышеуказанного обратного вала 26), состояние заряда (SOC) и сигнал из переключателя режима движения по бездорожью и т.п. Дополнительно, в качестве сигналов команд управления, которые должны выводиться, например, команда управления крутящим моментом для первого мотор-генератора (MG1) и команда управления крутящим моментом для второго мотор-генератора (MG2) выводятся в MG-ECU 43, и команда управления крутящим моментом двигателя выводится в ENG-ECU 44. Кроме того, управляющие гидравлические давления PbC1, PbCS, PbCL, PbB1 для муфт C1, CS, CL и тормоза B1 выводятся из HV-ECU 45. Здесь, вышеприведенные ECU 43, 44, 45 составляют контроллер.
[0024] Различные режимы движения задаются посредством обеспечения функционирования вышеуказанных мотор-генераторов 23, 32 в качестве электромоторов или электрогенераторов и управления муфтами C1, CS и тормозом B1 в состояния зацепления или расцепления. Фиг. 3 совместно показывает режимы движения. Относительно муфт C1, CS и тормоза B1 на фиг. 3, знак круга показывает состояние зацепления, знак треугольника показывает то, что одно из означенного находится в состоянии зацепления, а пустое место показывает состояние расцепления. Дополнительно, относительно первого мотор-генератора (MG1) и второго мотор-генератора (MG2) на фиг. 3, "G" показывает то, что мотор-генератор функционирует в основном в качестве электрогенератора, а "M" показывает то, что мотор-генератор функционирует в основном в качестве электромотора во время приведения в движение и выступает в качестве генератора во время рекуперации. Гибридный режим (HV) представляет собой режим движения при формировании приводной мощности с помощью двигателя 20 и мотор-генераторов 23, 32, и могут выбираться параллельный режим и последовательный режим. В качестве движения вперед в параллельном режиме, возможно движение, в котором вышеописанный механизм 21 повышающей передачи переводится на ступень повышающей передачи (высокую), и движение, в котором механизм 21 повышающей передачи переводится на ступень прямого соединения (низкую). Ступень повышающей передачи задается посредством зацепления только тормоза B1. В этом случае, первый мотор-генератор 23 выступает в качестве электрогенератора (G), и частота вращения двигателя 20 управляется как частота вращения, обеспечивающая хорошую эффективность использования топлива. Электрическая мощность, генерируемая посредством первого мотор-генератора 23, подается во второй мотор-генератор 32, и второй мотор-генератор 32 выступает в качестве электромотора (M). Напротив, ступень прямого соединения задается посредством зацепления только первой муфты C1, и в этом случае, функции мотор-генератора 23, 32 являются идентичными функциям в случае движения на ступени повышающей передачи.
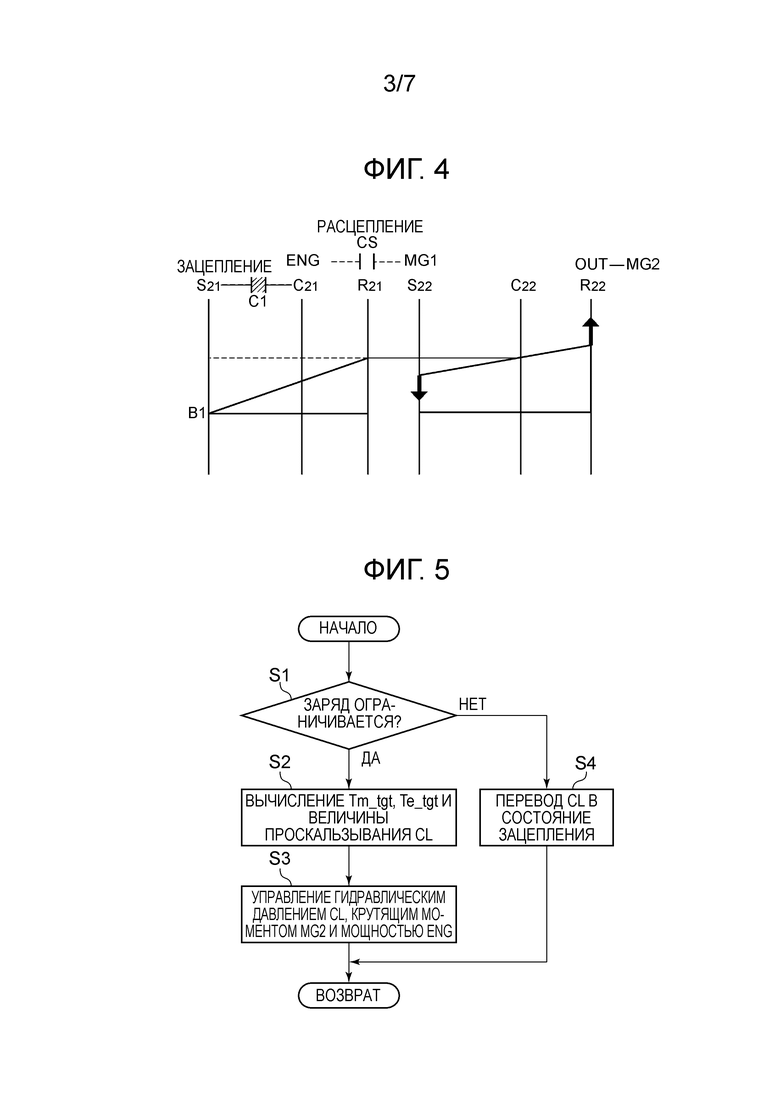
[0025] Фиг. 4 является коллинеарной схемой для планетарной зубчатой передачи, конфигурирующей механизм 21 повышающей передачи, и планетарной зубчатой передачи, конфигурирующей механизм 22 разделения динамической мощности, когда транспортное средство движется в гибридном режиме. Левая сторона по фиг. 4 является коллинеарной схемой для механизма 21 повышающей передачи, а правая сторона является коллинеарной схемой для механизма 22 разделения динамической мощности. Во время движения вперед солнечная шестерня S21 стопорится посредством тормоза B1, и водило C21 вращается посредством двигателя 20. Следовательно, коронная шестерня R21 вращается с частотой, которая выше частоты вращения двигателя. Иными словами, механизм 21 повышающей передачи становится ступенью повышающей передачи, на которой передаточное отношение ниже 1. В механизме 22 разделения динамической мощности, водило C22 вращается вместе с коронной шестерней R21 механизма 21 повышающей передачи, и крутящий момент является крутящим моментом в положительном направлении (направлении вращения двигателя 20). В этом состоянии, первый мотор-генератор 23 выступает в качестве электрогенератора, крутящий момент в отрицательном направлении (направлении прекращения вращения) действует на солнечную шестерню S22, и крутящий момент в положительном направлении, ассоциированный с ним, действует на коронную шестерню R22. Иными словами, динамическая мощность двигателя 20 разделяется на сторону солнечной шестерни S22 и сторону коронной шестерни R22. Затем электрическая мощность, генерируемая посредством первого мотор-генератора 23, подается во второй мотор-генератор 32, и второй мотор-генератор 32 выступает в качестве электромотора. Следовательно, крутящий момент суммируется с крутящим моментом, который должен выводиться из коронной шестерни R22, и выводится на ведущие колеса 31. Пунктирная линия на фиг. 4 показывает рабочее состояние, когда ступень прямого соединения устанавливается в механизме 21 повышающей передачи. Здесь, при заднем ходе, посредством динамической мощности, выводимой посредством двигателя 20, первый мотор-генератор 23 вращается, чтобы формировать электричество, и за счет электрической мощности, второй мотор-генератор 32 выступает в качестве электромотора в направлении отрицательного вращения.
[0026] Последовательный режим представляет собой режим движения посредством приведения в действие первого мотор-генератора 23 в качестве электрогенератора посредством двигателя 20 и приведения в действие второго мотор-генератора 32 в качестве электромотора за счет электрической мощности. Следовательно, посредством зацепления только второй муфты CS, динамическая мощность двигателя 20 передается в первый мотор-генератор 23, и первый мотор-генератор 23 выступает в качестве электрогенератора (G). Дополнительно, посредством подачи электрической мощности, генерируемой посредством первого мотор-генератора 23, второй мотор-генератор 32 выступает в качестве электромотора (M) и вращается положительно для движения в режиме переднего хода или вращается отрицательно для движения в режиме заднего хода.
[0027] EV-режим представляет собой режим движения за счет электрической мощности устройства накопления электричества без использования динамической мощности двигателя 20, и следовательно, транспортное средство движется как электротранспортное средство (EV: электромобиль). Второй мотор-генератор 32 соединяется с ведущими колесами 31 через гидродинамическую муфту 33 или блокировочную муфту CL. Следовательно, в EV-режиме, в основном, второй мотор-генератор 32 работает в качестве источника мощности приведения в движение, и когда приводная мощность или тормозная мощность является недостаточной, первый мотор-генератор 23 используется параллельно. Иными словами, возможны одноприводный режим приведения в движение с использованием только второго мотор-генератора 32 и двухприводный режим приведения в движение с использованием обоих мотор-генераторов 23, 32.
[0028] В одноприводном режиме приведения в движение, поскольку только второй мотор-генератор 32 работает в качестве источника мощности приведения в движение, муфты C1, CS и тормоз B1 расцепляются, и первый мотор-генератор 23, который не управляется специально, не выполняет ни подачу электрической мощности, ни рекуперацию. Затем второй мотор-генератор 32 выступает в качестве электромотора (M) во время приведения в движение и выступает в качестве электрогенератора (G) во время торможения. Когда тормозная мощность, ассоциированная с рекуперацией, является недостаточной, зацепляется, по меньшей мере, одно из первой муфты C1 и тормоза B1. Дополнительно, мотор-генераторы 23, 32 выступают в качестве электрогенераторов (G), и отрицательный крутящий момент, ассоциированный с генерированием электричества, выступает в качестве тормозной мощности.
[0029] Двухприводный режим приведения в движение представляет собой режим движения с зацеплением первой муфты C1 и тормоза B1 и обеспечением работы обоих мотор-генераторов 23, 32 в качестве электромоторов (M). В механизме 21 повышающей передачи, первая муфта C1 зацепляется, и весь механизм 21 повышающей передачи объединяется. В этом состоянии, тормоз B1 зацепляется, и в силу этого вращение всего механизма 21 повышающей передачи прекращается. Следовательно, водило C22 механизма 22 разделения динамической мощности, соединенного с коронной шестерней R21, стопорится, и в этом состоянии первый мотор-генератор 23 работает в качестве электромотора в направлении отрицательного вращения. Соответственно, крутящий момент посредством первого мотор-генератора 23 выводится из коронной шестерни R22 в качестве крутящего момента в направлении положительного вращения. Дополнительно, второй мотор-генератор 32 работает в качестве электромотора в направлении положительного вращения. Соответственно, крутящий момент второго мотор-генератора 32 суммируется с крутящим моментом, который должен выводиться из выходной шестерни 25. Во время движения назад направления крутящего момента мотор-генераторов 23, 32 являются противоположными направлениям крутящего момента во время движения вперед.
[0030] В случае движения в гибридном режиме, первый мотор-генератор 23 выступает в качестве электрогенератора и предоставляет реактивный крутящий момент для солнечной шестерни S22. Крутящий момент, вводимый из двигателя 20 в водило C22, усиливается в зависимости от передаточного отношения планетарной зубчатой передачи, конфигурирующей механизм 22 разделения динамической мощности (отношения между числом зубьев коронной шестерни R22 и числом зубьев солнечной шестерни S22), и выводится из выходной шестерни 25 к ведущим колесам 31. Следовательно, когда реактивный крутящий момент от первого мотор-генератора 23 является низким, уменьшается крутящий момент двигателя, который должен выводиться из выходной шестерни 25. Первый мотор-генератор 23 формирует реактивный крутящий момент посредством выполнения генерирования электричества, и следовательно, когда генерирование электричества ограничивается, уменьшается реактивный крутящий момент. Пример случая, в котором генерирование электричества ограничивается, представляет собой случай, в котором состояние заряда (SOC) устройства 41 накопления электричества является достаточно высоким и представляет собой так называемое состояние полного заряда, в котором состояние заряда достигает ранее определенного верхнего предела либо состояния заряда около состояния полного заряда. Для обеспечения приводного крутящего момента в таком состоянии, устройство управления согласно изобретению выполнено с возможностью осуществлять управление, описанное ниже.
[0031] Фиг. 5 является блок-схемой последовательности операций способа для описания примера управления. Управляющая процедура выполняется многократно с предварительно определенным коротким временным интервалом посредством вышеописанного HV-ECU 45, когда двигатель 20 выводит динамическую мощность. После начала процедуры, во-первых, определяется то, ограничивается или нет заряд устройства 41 накопления электричества (этап S1). Определение, например, может выполняться посредством сравнения между SOC, вводимым в HV-ECU 45, и ранее сохраненным опорным значением. В случае если положительное определение выполнено на этапе S1, поскольку устройство 41 накопления электричества находится в так называемом состоянии полного заряда или в состоянии около состояния полного заряда, HV-ECU 45 вычисляет целевой крутящий момент Tm_tgt второго мотор-генератора 32, целевой крутящий момент Te_tgt двигателя 20 и величину проскальзывания блокировочной муфты CL (т.е. величину дифференциального вращения гидродинамической муфты 33) (этап S2). Ниже описывается пример вычисления.
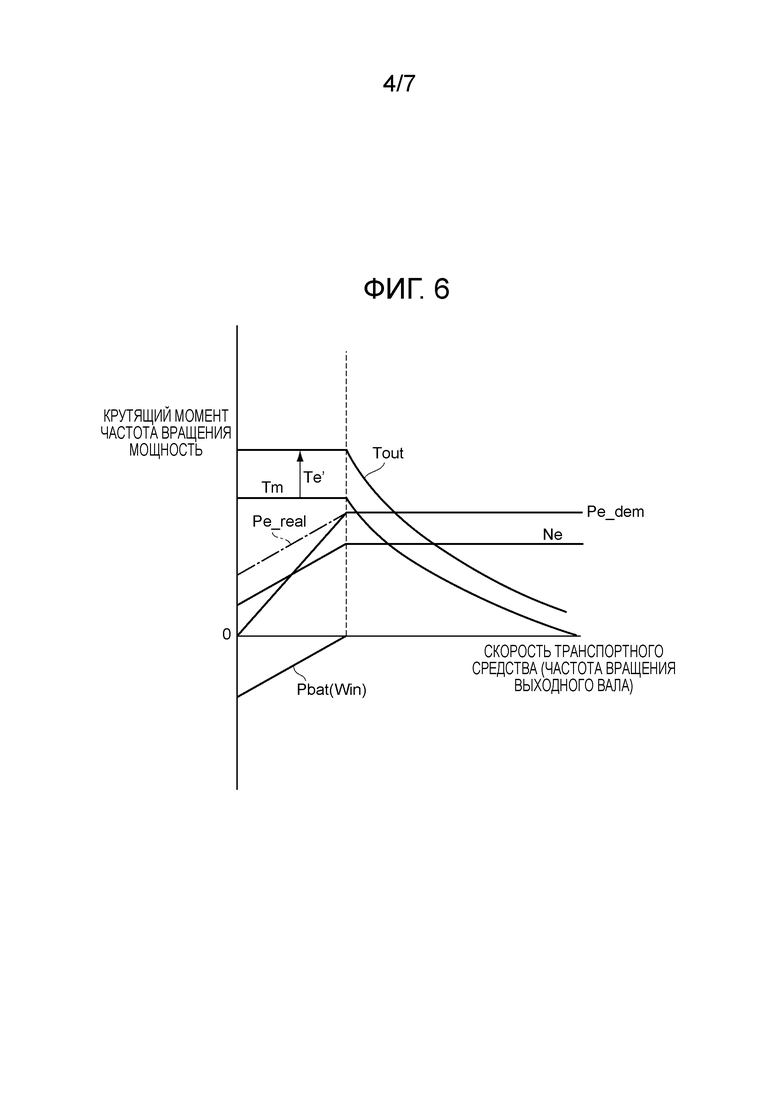
[0032] Фиг. 6 показывает взаимосвязь баланса между мощностью и крутящим моментом, когда транспортное средство начинает движение в состоянии, в котором транспортное средство остановлено при приведении в действие двигателя 20. Частота Ne вращения и мощность Pe_real двигателя 20 являются предварительно определенными значениями, и выходная мощность выше требуемой мощности Pe_dem. Разность мощности используется для заряда, в качестве мощности Pbat аккумулятора, когда величина заряда устройства 41 накопления электричества является небольшой. Мощность Pbat аккумулятора является мощностью Win, с помощью которой заряжается устройство 41 накопления электричества. Между тем, крутящий момент, выводимый посредством двигателя 20, увеличивается или уменьшается посредством механизма 21 повышающей передачи и механизма 22 разделения динамической мощности и выводится к ведущим колесам 31. Крутящий момент является прямым передаваемым крутящим моментом Te'. Дополнительно, электрическая мощность, генерируемая посредством первого мотор-генератора 23, подается во второй мотор-генератор 32, и за счет этого второй мотор-генератор 32 выводит крутящий момент Tm. Следовательно, выходной крутящий момент Tout от двигателя 20 и второго мотор-генератора 32 является крутящим моментом (Tm+Te'), получающимся в результате суммирования прямого передаваемого крутящего момента Te' и крутящего момента Tm от второго мотор-генератора 32. Здесь, в силовой передаче, имеющей конфигурацию, показанную на фиг. 1, крутящий момент Tm второго мотор-генератора 32 является крутящим моментом Tturbin рабочего колеса 36 турбины.
[0033] Частота Ne вращения двигателя увеличивается с увеличением скорости V транспортного средства. В силу этого, разность между активной мощностью Pe-real и требуемой мощностью Pe_dem, т.е. избыточная мощность, постепенно уменьшается и в завершение становится нулевой. Если устройство 41 накопления электричества может быть заряжено в процессе, может получаться намеченный выходной крутящий момент Tout. Здесь, требуемая мощность Pe_dem оценивается на основе требуемой величины приведения в движение позиции акселератора и т.п., скорости транспортного средства, ранее подготовленной карты и т.п., аналогично традиционно известному управлению приводной мощностью. В отличие от этого, когда заряд ограничивается, избыточная мощность ограничивается. Следовательно, прямой передаваемый крутящий момент Te' от двигателя 20 ограничивается, и выходной крутящий момент Tout становится недостаточным. Следовательно, устройство управления в варианте осуществления изобретения потребляет, в качестве потерь, мощность, которую устройство 41 накопления электричества не может принимать (заряжаться), и за счет этого обеспечивает выходной крутящий момент Tout.
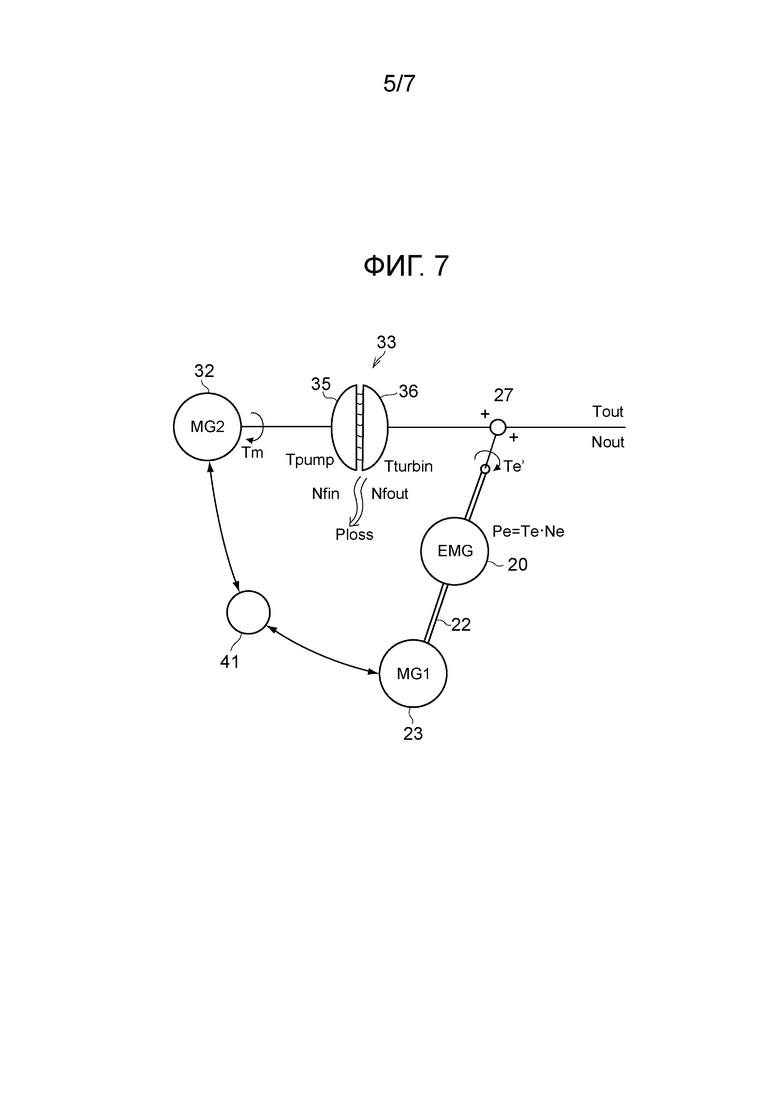
[0034] Фиг. 7 показывает модель для описания вычисления, которое выполняется посредством устройства управления в варианте осуществления изобретения. Мощность Pe, выводимая посредством двигателя 20, является произведением (Ne*Te) между частотой Ne вращения и крутящим моментом Te, и прямой передаваемый крутящий момент Te' на основе мощности Pe передается на обратный вал 26 и ведущие колеса 31 через ведомую шестерню 27. Между тем, первый мотор-генератор 23 приводится в действие посредством двигателя 20, чтобы генерировать электричество, и электрическая мощность подается в устройство 41 накопления электричества и второй мотор-генератор 32. Посредством подаваемой электрической мощности второй мотор-генератор 32 работает в качестве электромотора и выводит крутящий момент Tm. В состоянии, в котором блокировочная муфта CL расцепляется, существует разность между частотой Nfin вращения рабочего колеса 35 насоса и частотой Nfout вращения рабочего колеса 36 турбины. Здесь, крутящий момент Tpump рабочего колеса 35 насоса является произведением (τ*Nfin2) между коэффициентом τ емкости гидродинамической муфты 33 и квадратом частоты Nfin вращения, и крутящий момент Tturbin рабочего колеса 36 турбины является произведением (τ*Nfout2) между коэффициентом τ емкости и квадратом частоты Nfout вращения. Крутящий момент рабочего колеса 36 турбины передается из ведущей шестерни 38 в ведомую шестерню 27 или на обратный вал 26 и суммируется с прямым передаваемым крутящим моментом Te', так что получается выходной крутящий момент Nout. Здесь, частота вращения выходного вала представляется как Nout. Затем рабочее колесо 35 насоса и рабочее колесо 36 турбины выполняют относительное вращение, и в силу этого потери динамической мощности формируются вследствие расщепления и взбалтывания масла, так что генерируется тепло, соответствующее мощности Ploss потерь. Иными словами, так называемая избыточная мощность, которую не может принимать устройство 41 накопления электричества, потребляется в качестве мощности Ploss потерь.
[0035] В этом случае, по мере того, как увеличивается так называемая частота вращения при проскальзывании или частота дифференциального вращения в гидродинамической муфте 33, увеличивается мощность Ploss потерь, но снижается крутящий момент, который должен выводиться из гидродинамической муфты 33, т.е. крутящий момент Tturbin турбины, приводя к снижению выходного крутящего момента Tout. Следовательно, величина проскальзывания блокировочной муфты CL, крутящий момент Te двигателя 20 и крутящий момент Tm второго мотор-генератора 32 управляются таким образом, что избыточная мощность, которую не может принимать устройство 41 накопления электричества, равна мощности, которую потребляет гидродинамическая муфта 33. Фиг. 8 является блок-схемой последовательности операций способа, показывающей пример управления.
[0036] Процедура, показанная на фиг. 8, является вложенной процедурой, которая выполняется на вышеописанном этапе S2 по фиг. 5. Во-первых, крутящий момент Tm второго мотор-генератора 32 оценивается (этап S21). Крутящий момент Tm второго мотор-генератора 32 постепенно увеличивается с нуля. Следовательно, первоначальное значение Tm(0) является нулем, и ранее определенная величина ΔTm увеличения суммируется с последним значением Tm(i) для каждого цикла выполнения процедуры по фиг. 8, так что вычисляется крутящий момент.
Tm(i+1)=Tm(i)+ΔTm
[0037] Между тем, прямой передаваемый крутящий момент Te' вычисляется (этап S22). Прямой передаваемый крутящий момент Te' оценивается посредством вычитания крутящего момента Tm второго мотор-генератора 32 из требуемого выходного крутящего момента Tout_dem. Здесь, требуемый выходной крутящий момент Tout_dem оценивается из требуемой мощности и скорости транспортного средства после того, как требуемая мощность оценивается на основе требуемой величины приведения в движение позиции акселератора и т.п. и скорости транспортного средства.
Te'(i+1)=Tout_dem-Tm(i+1)
[0038] Затем, мощность Pe(i+1) двигателя вычисляется из крутящего момента Te(i+1) двигателя и реальной частоты Ne_real вращения двигателя (этап S23). Здесь, крутящий момент Te(i+1) двигателя оценивается на основе вышеуказанного прямого передаваемого крутящего момента Te'(i+1) и передаточного отношения в механизме 22 разделения динамической мощности и тракте L передачи. Дополнительно, реальная частота Ne_real вращения двигателя может оцениваться на основе скорости V транспортного средства, позиции акселератора, ранее подготовленной карты и т.п.
Pe(i+1)=Te(i+1)*Ne_real
[0039] Мощность Ploss потерь, которая требуется, является избыточной мощностью, получающейся в результате исключения мощности Win (величины электрической мощности), с помощью которой может быть заряжено устройство 41 накопления электричества, из вышеуказанной мощности Pe(i+1) двигателя, и следовательно, посредством вычисления, требуемая мощность Ploss_dem потерь вычисляется (этап S24).
Ploss_dem(i+1)=Pe(i+1)+Win
Здесь, в вышеприведенной формуле, мощность Win возможности заряда является отрицательным значением.
[0040] Определяется то, почти равна или нет активная мощность Ploss_real(i+1) потерь вышеуказанной требуемой мощности Ploss_dem потерь (этап S25). Определение может представлять собой определение того, меньше или нет разность между активной мощностью Ploss_real(i+1) потерь и требуемой мощностью Ploss_dem потерь ранее определенного опорного значения. Дополнительно, активная мощность Ploss_real(i+1) потерь может оцениваться посредством следующего вычисления.
Ploss=τNfin2*Nfin-τNfin2*Nfout=τNfin2(Nfin-e*Nin)=τNm3(1-e)
Здесь, справедливо Nfin=Nm (частота вращения второго мотор-генератора 32). Дополнительно, e является передаточным отношением в гидродинамической муфте 33, и справедливо e=Nfout/Nfin. Следовательно, активная мощность Ploss потерь оценивается, поскольку частота Nfout вращения рабочего колеса 36 турбины оценивается из скорости транспортного средства, и крутящий момент Tm второго мотор-генератора 32 является значением, определенным на этапе S21 по фиг. 8.
[0041] В случае если отрицательное определение выполнено на вышеуказанном этапе S25, поскольку разность между требуемым значением и фактическим значением для мощности Ploss потерь по-прежнему является большой, приращение (i+1) значения i счетчика выполняется (этап S26). После этого, процесс возвращается к этапу S21. С другой стороны, в случае если положительное определение выполнено на этапе S25, требуемая мощность Ploss_dem потерь может примерно удовлетворяться посредством крутящего момента Tm второго мотор-генератора 32 и передаточного отношения e гидродинамической муфты 33 в это время. Следовательно, крутящий момент Tm(i) второго мотор-генератора 32 в это время задается в качестве целевого крутящего момента Tm_tgt, и крутящий момент Te(i) двигателя в это время задается в качестве целевого крутящего момента двигателя Te_tgt (этап S27).
[0042] В процедуре, показанной на фиг. 8, второй мотор-генератор 32 и двигатель 20 управляются таким образом, что достигаются соответствующие целевые крутящие моменты, оцененные так, как описано выше, и величина проскальзывания блокировочной муфты CL управляется таким образом, что достигается вышеуказанное передаточное отношение e (этап S23). Другими словами, должно выполняться только управление с обратной связью гидравлическим давлением блокировочной муфты CL таким образом, что передаточное отношение становится передаточным отношением, обеспечивающим возможность достижения необходимой мощности потерь. Здесь, в процедуре, показанной на фиг. 5, в случае если отрицательное определение выполнено на этапе S1, поскольку заряд не ограничивается, блокировочная муфта CL управляется в состояние зацепления (этап S4).
[0043] Как показано выше этап S22, когда увеличивается крутящий момент Tm второго мотор-генератора 32, и увеличивается мощность Ploss потерь, снижается прямой передаваемый крутящий момент Te', выходной крутящий момент Tout становится недостаточным, и возрастают потери энергии. С другой стороны, когда снижается крутящий момент Tm второго мотор-генератора 32, и снижается мощность Ploss потерь, необходимо снижать мощность двигателя для уменьшения избыточной мощности, и за счет этого снижается выходной крутящей момент Tout. Напротив, при вышеописанном управлении согласно варианту осуществления изобретения, общее количество избыточной мощности, с помощью которой не может быть заряжено устройство 41 накопления электричества, потребляется посредством гидродинамической муфты 33 в качестве мощности потерь. В случае если мощность Win аккумулятора устройства 41 накопления электричества является нулевой, общее количество мощности (мощность за исключением так называемой мощности прямой передачи для движения), которая составляет мощность двигателя и которая подается для генерирования электричества, потребляется посредством гидродинамической муфты 33.
[0044] Фиг. 9 является схемой, показывающей взаимосвязь. Прямой передаваемый крутящий момент Te' снижается с увеличением крутящего момента Tm второго мотор-генератора 32, и аналогично, мощность Pe двигателя, соответствующая прямому передаваемому крутящему моменту Te', снижается с увеличением крутящего момента Tm второго мотор-генератора 32. Напротив, мощность Ploss потерь увеличивается с увеличением крутящего момента Tm второго мотор-генератора 32. Здесь, в случае если устройство 41 накопления электричества может быть заряжено, мощность Win заряда (мощность аккумулятора) суммируется с мощностью Ploss потерь, и результирующее значение также увеличивается с увеличением крутящего момента Tm второго мотор-генератора 32.
[0045] В вышеописанном примере управления, показанном на фиг. 8, поскольку постепенно увеличивается крутящий момент Tm второго мотор-генератора 32, мощность Ploss потерь (или мощность, получающаяся в результате суммирования мощности Win аккумулятора с мощностью Ploss потерь) является небольшим значением в начале, и следовательно, избыточная мощность, которую не может принимать устройство 41 накопления электричества, является большим значением, как показано посредством штрихпунктирной линии. По мере того, как увеличивается крутящий момент Tm второго мотор-генератора 32, увеличивается мощность Ploss потерь (или мощность, получающаяся в результате суммирования мощности Win аккумулятора с мощностью Ploss потерь), и постепенно снижается избыточная мощность. Как результат, в завершение, они совпадают между собой. Это представляет собой состояние, в котором положительное определение выполнено на этапе S25 в примере управления, показанном на фиг. 8. Следовательно, крутящий момент в рабочей точке (точке, показанной посредством знака круга на фиг. 9), в которой мощность Ploss потерь (или мощность, получающаяся в результате суммирования мощности Win аккумулятора с мощностью Ploss потерь) и избыточная мощность совпадают между собой, приспосабливается в качестве целевого крутящего момента Tm_tgt второго мотор-генератора 32. В рабочей точке максимизируется сумма прямого передаваемого крутящего момента Te' и крутящего момента Tm второго мотор-генератора 32.
[0046] Здесь, в вышеприведенном варианте осуществления, для упрощения описания, энергетический баланс вычисляется посредством энергии генерирования электричества посредством первого мотор-генератора 23 и энергии, которая потеряна (потреблена) в гидродинамической муфте 33. Изобретение не ограничено этим. Фактически, в дополнение к потреблению в гидродинамической муфте 33, электрическая мощность, генерируемая посредством первого мотор-генератора 23, потребляется в качестве потерь посредством работы первого мотор-генератора 23 и потребляется в качестве потерь в электрических схемах, таких как инвертор, которые управляют мотор-генераторами 23, 32. Следовательно, в изобретении, энергия, которая должна окончательно потребляться посредством гидродинамической муфты 33, может вычисляться с учетом энергопотребления.
[0047] Дополнительно, вышеуказанный пример управления, показанный на фиг. 8, является примером оценки вышеуказанной точки D посредством постепенного увеличения крутящего момента второго мотор-генератора 32. Тем не менее, в устройстве управления в варианте осуществления изобретения, с другой стороны, крутящий момент Tm второго мотор-генератора 32 может быть достаточно высоким в начале, крутящий момент Tm может постепенно снижаться из этого состояния, и в силу этого может оцениваться крутящий момент в вышеуказанной точке D.
[0048] Фиг. 10 является временной диаграммой, показывающей изменения частоты вращения двигателя, крутящего момента двигателя, частот вращения и крутящих моментов мотор-генераторов 23, 32, гидравлического давления блокировочной муфты CL и т.п., когда выполняется вышеописанное управление, показанное на фиг. 5. В состоянии, в котором двигатель 20 вращается на предварительно определенной частоте вращения, к примеру, на частоте вращения на холостом ходу, и транспортное средство остановлено, первый мотор-генератор 23 выступает в качестве электрогенератора. Второй мотор-генератор 32 остановлен, поскольку транспортное средство остановлено, и крутящий момент задается равным предварительно определенному низкому крутящему моменту. Следовательно, часть электрической мощности, генерируемой посредством первого мотор-генератора 23, потребляется посредством второго мотор-генератора 32, и большая часть используется для заряда устройства 41 накопления электричества. Следовательно, SOC постепенно увеличивается. Когда SOC достигает предварительно определенного порогового значения, которое ранее задано равным меньшему значению, чем значение, указывающее состояние полного заряда (время t1), увеличивается крутящий момент второго мотор-генератора 32, и постепенно увеличивается потребление электрической мощности. Кроме того, поскольку транспортное средство остановлено, механизм 21 повышающей передачи находится на ступени прямого соединения (низкой). Иными словами, гидравлическое давление первой муфты C1 управляется до предварительно определенного давления таким образом, что первая муфта C1 зацепляется, а гидравлическое давление тормоза B1 управляется до нуля таким образом, что тормоз B1 расцепляется.
[0049] Также в этот период выполняется заряд устройства 41 накопления электричества, и увеличивается SOC. Когда SOC достигает ранее определенного значения α около полного заряда (время t2), управление проскальзыванием гидродинамической муфты 33 начинается. В частности, гидравлическое давление блокировочной муфты CL постепенно снижается. Затем блокировочная муфта CL начинает скользить, и второй мотор-генератор 32 начинает вращаться. Здесь, крутящий момент второго мотор-генератора 32 поддерживается равным крутящему моменту в это время. Дополнительно, посредством вращения второго мотор-генератора 32, увеличивается энергопотребление. Следовательно, увеличивается частота вращения первого мотор-генератора 23, и увеличивается крутящий момент (отрицательный крутящий момент в направлении прекращения вращения). Кроме того, частота вращения и крутящий момент (т.е. мощность) двигателя 20 управляются таким образом, что требуемая величина приведения в движение удовлетворяется.
[0050] Затем, когда SOC дополнительно приближается к состоянию полного заряда (например, когда разность между текущим значением SOC и значением полного заряда становится предварительно определенным значением или меньше) (время t3), гидравлическое давление блокировочной муфты CL задается равным ранее определенному наименьшему давлению, и величина проскальзывания гидродинамической муфты 33 задается равной предварительно определенному максимальному значению. Дополнительно, частота вращения и крутящий момент двигателя 20 и частота вращения и крутящий момент первого мотор-генератора 23 поддерживаются равными частотам вращения и крутящим моментам в это время. Даже в это время, SOC продолжает увеличение, и следовательно, второй мотор-генератор 32 увеличивает крутящий момент при поддержании частоты вращения и потребляет электрическую мощность, генерируемую посредством первого мотор-генератора 23. Затем вся электрическая мощность, генерируемая посредством первого мотор-генератора 23, потребляется посредством второго мотор-генератора 32 (время t4), и крутящий момент второго мотор-генератора 32 поддерживается равным крутящему моменту в это время.
[0051] Согласно устройству управления в варианте осуществления изобретения, вышеописанное управление предоставляет возможность генерирования электричества посредством первого мотор-генератора 23 и формирования реактивного крутящего момента, ассоциированного с генерированием электричества, и за счет этого можно в достаточной степени увеличивать так называемый прямой передаваемый крутящий момент Te'. Иными словами, электрическая мощность, генерируемая посредством первого мотор-генератора 23, потребляется посредством формирования дифференциального вращения гидродинамической муфты 33 и вращения второго мотор-генератора 32, и следовательно, можно использовать крутящий момент, выводимый посредством второго мотор-генератора 32, в качестве приводного крутящего момента. В частности, управление выполняется таким образом, что максимизируется сумма прямого передаваемого крутящего момента Te' и крутящего момента Tm второго мотор-генератора 32, и следовательно, можно получать необходимую и достаточную приводную мощность, соответствующую требуемой величине приведения в движение. Дополнительно, второй мотор-генератор 32 и гидродинамическая муфта 33 предоставляются в позиции, разнесенной от тракта передачи, вдоль которого прямой передаваемый крутящий момент Te' передается на ведущие колеса 31. В силу этого, прямой передаваемый крутящий момент Te' из двигателя 20 не прикладывается к гидродинамической муфте 33, и следовательно, гидродинамическая муфта небольшого размера, имеющая небольшую емкость, может приспосабливаться в качестве гидродинамической муфты 33. Кроме того, избыточная энергия потребляется в качестве энергии потерь Ploss, и даже когда генерируется тепло, само масло гидродинамической муфты 33 нагревается. Дополнительно, масло циркулирует между гидродинамической муфтой 33 и неиллюстрированным масляным радиатором и т.п., и тепло переносится наружу. Следовательно, можно не допускать или подавлять снижение долговечности вследствие нагрева.
[0052] Здесь, намеченное гибридное транспортное средство в изобретении, вкратце, представляет собой гибридное транспортное средство, включающее в себя двигатель, электрогенератор, механизм разделения динамической мощности, соединенный с двигателем и электрогенератором, электромотор и сцепление, предоставленное между электромотором и ведущим колесом, и не ограничено гибридным транспортным средством, включающим в себя зубчатую передачу с конфигурацией, показанной на фиг. 1. Например, вышеописанный механизм повышающей передачи не должен обязательно включаться.

Изобретение относится к устройству управления для устройства передачи динамической мощности, включающего в себя двигатель, электрогенератор и электромотор. Техническим результатом является управление приводным крутящим моментом без снижения долговечности устройства передачи динамической мощности, даже когда заряд ограничивается. Предложено устройство управления для устройства передачи динамической мощности, где устройство передачи динамической мощности включает: дифференциальный механизм, электрогенератор, электромотор и гидродинамическую муфту. Устройство управления включает: электронный блок управления, выполненный с возможностью ограничивать заряд устройства накопления электричества с помощью электрической мощности, генерируемой посредством электрогенератора, в зависимости от состояния устройства накопления электричества и дифференциально вращать гидродинамическую муфту и приводить в действие электромотор посредством электрической мощности таким образом, что потери динамической мощности формируются в гидродинамической муфте, при ограничении заряда устройства накопления электричества. 3 з.п. ф-лы, 10 ил.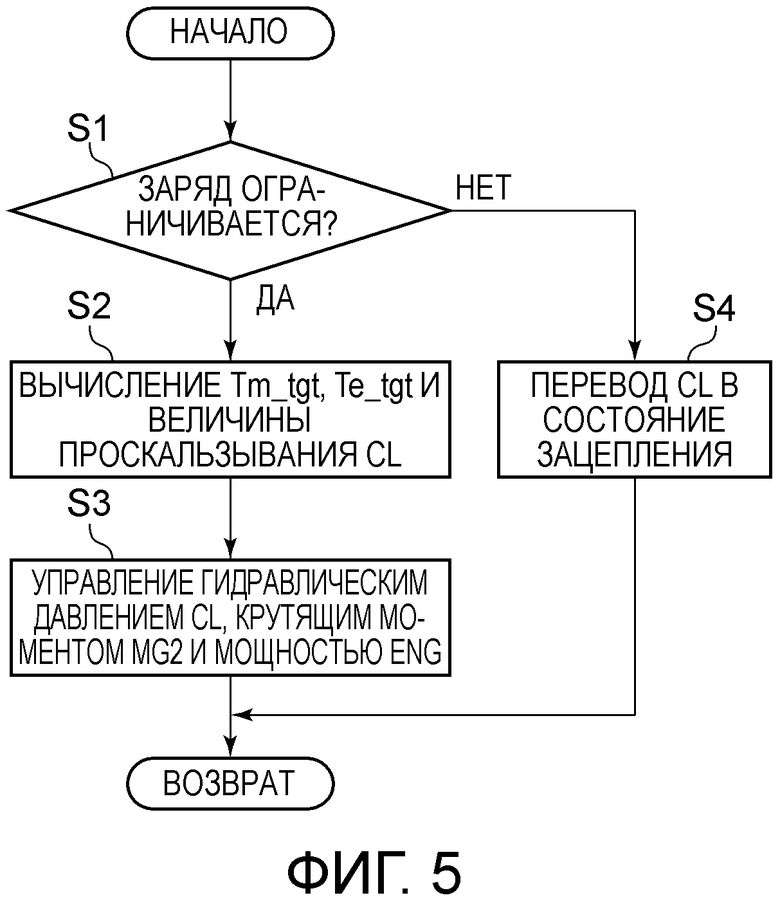
1. Устройство управления для устройства передачи динамической мощности, причем устройство передачи динамической мощности включает в себя дифференциальный механизм, электрогенератор, электромотор и гидродинамическую муфту, причем дифференциальный механизм выполнен с возможностью разделять динамическую мощность, выводимую посредством двигателя, на ведущее колесо и электрогенератор, причем электрогенератор выполнен с возможностью генерировать электрическую мощность таким образом, что электромотор приводится в действие посредством электрической мощности, и крутящий момент электромотора выводится на ведущее колесо, и заряжать устройство накопления электричества частью электрической мощности, причем электромотор расположен в позиции, разнесенной от тракта передачи, вдоль которого динамическая мощность двигателя передается на ведущее колесо через дифференциальный механизм, причем гидродинамическая муфта расположена между электромотором и трактом передачи, причем устройство управления содержит:
- электронный блок управления, выполненный с возможностью ограничивать заряд устройства накопления электричества с помощью электрической мощности, генерируемой посредством электрогенератора, в зависимости от состояния устройства накопления электричества, причем электронный блок управления выполнен с возможностью дифференциально вращать гидродинамическую муфту и приводить в действие электромотор посредством электрической мощности таким образом, что потери динамической мощности формируются в гидродинамической муфте, при ограничении заряда устройства накопления электричества.
2. Устройство управления по п. 1, в котором электронный блок управления выполнен с возможностью управлять крутящим моментом электромотора таким образом, что мощность, которая составляет мощность, выводимую посредством двигателя, и посредством которой устройство накопления электричества не может заряжаться, равна мощности для потерь динамической мощности посредством дифференциального вращения гидродинамической муфты.
3. Устройство управления по п. 1, в котором электронный блок управления выполнен с возможностью управлять крутящим моментом электромотора таким образом, что сумма крутящего момента, который должен передаваться на ведущее колесо через тракт передачи, и крутящего момента, который должен передаваться в тракт передачи через гидродинамическую муфту, максимизируется, когда двигатель выводит предварительно определенную мощность.
4. Устройство управления по любому из пп. 1-3, в котором дифференциальный механизм включает в себя первый вращательный элемент, второй вращательный элемент и третий вращательный элемент, причем дифференциальный механизм выполнен с возможностью осуществлять дифференциальное действие с первым вращательным элементом, вторым вращательным элементом и третьим вращательным элементом, причем первый вращательный элемент принимает крутящий момент двигателя, второй вращательный элемент соединен с электрогенератором, третий вращательный элемент выводит крутящий момент на ведущее колесо, и гидродинамическая муфта выполнена с возможностью суммировать крутящий момент из электромотора с крутящим моментом, выводимым из третьего вращательного элемента.
| ОПТИМИЗИРОВАННЫЙ ЧАСОВОЙ МЕХАНИЗМ | 2017 |
|
RU2743149C2 |
| JP 2014113895 A, 2014-06-26 | |||
| US 2013096752 A1, 2013-04-18 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2535830C1 |

