Изобретение относится к области волоконной оптики и может быть использовано при создании волоконно-оптических гироскопов и других фазовых интерферометрических датчиков физических величин, построенных по схеме интерферометра Саньяка.
Общая структурная схема волоконно-оптического гироскопа (ВОГ) с закрытым контуром описана в ряде патентов (патент РФ №2444704, кл. G01С 19/72, 26.10.2010, патент РФ №2522147, кл. G01C 19/64, 13.11.2012). Для реализации предлагаемого способа повышения точности пригодны любые ВОГ компенсационного типа, содержащие схему формирования ступенчатого модулирующего фазового сигнала.
Известен способ модуляции сигнала волоконно-оптического гироскопа с закрытым контуром, где в качестве вспомогательного используют фазовый квадратурный сигнал (Pavlath G.A. Closed-loop fiber optic gyros. SPIE v. 2837, 1996, pp. 46-60). Для расширения динамического диапазона измерения угловых скоростей и получения высокой линейности выходной характеристики ВОГ в оптоэлектронной схеме обработки сигнала применяют компенсационный метод: одновременно с напряжением вспомогательной фазовой модуляции подают компенсирующее разность фаз Саньяка пилообразное ступенчатое напряжение. При достижении пилообразным сигналом границы диапазона фазовой модуляции сигнал сбрасывают на величину напряжения, эквивалентную фазовой разности между интерферирующими лучами, равной 2π радиан, тем самым обеспечивая расширение динамического диапазона. Перепад уровня сигнала на фотоприемном устройстве в момент сброса сигнала фазовой модуляции используют в качестве сигнала обратной связи для компенсации отклонений величины масштабного коэффициента (МК) путем подстройки коэффициента усиления генератора модулирующего сигнала.
Одним из недостатков известного способа модуляции является зависимость эффективности алгоритма стабилизации значения масштабного коэффициента от величины сигнала вращения. Недостаток объясняется тем, что различным угловым скоростям ВОГ соответствуют различные углы наклона пилообразного ступенчатого сигнала компенсации. Временной интервал между моментами сброса сигнала модуляции, а значит и моментами получения сигнала обратной связи, также зависит от угловой скорости, что может привести к дестабилизации МК при малых скоростях вращения.
Наиболее близким к предлагаемому и принятым за прототип является способ повышения точности устройств на основе кольцевого интерферометра Саньяка (патент US №5141316, кл. G01С 19/72, опубл. 25.08.1992). Суть известного способа состоит в следующем: сигнал представляет собой последовательность уровней длительностью  , где τ - собственное время контура. Исходную форму сигнала Фm на модулирующем устройстве подбирают таким образом, чтобы сигнал фазовой разности лучей на интерферометре имел следующую форму: нечетные по счету уровни должны содержать квадратурную модуляцию с амплитудами ±Ф0, четные - с амплитудами ±аФ0, причем
, где τ - собственное время контура. Исходную форму сигнала Фm на модулирующем устройстве подбирают таким образом, чтобы сигнал фазовой разности лучей на интерферометре имел следующую форму: нечетные по счету уровни должны содержать квадратурную модуляцию с амплитудами ±Ф0, четные - с амплитудами ±аФ0, причем

В этом случае линейные комбинации Xp и Хg выходных уровней х1…х4, последовательно регистрируемых на фотоприемном устройстве, помимо информации о величине невзаимного фазового сдвига, будут содержать также информацию об эффективности фазовой модуляции:


Как и в случае использования квадратурной модуляции с длительностью уровня τ (Pavlath G.A. Closed-loop fiber optic gyros. SPIE, v. 2837, 1996, pp. 46-60), предлагаемый в прототипе подход позволяет регистрировать величину фазового сдвига Саньяка с периодом τ, в то время как проблему, связанную с дестабилизацией масштабного коэффициента на малых скоростях, решают за счет включения в модулирующий сигнал вспомогательного сигнала постоянной частоты, предназначенного для оценки величины отклонения МК, и соответствующей подстройки коэффициента усиления генератора модулирующего сигнала.
Недостатком прототипа является то, что при формировании предлагаемой в прототипе фазоразностной последовательности с использованием серродинной модуляции (Pavlath G.A. Closed-loop fiber optic gyros. SPIE, v. 2837, 1996, pp. 46-60) на модулирующем устройстве с диапазоном фазовой модуляции -π…+π радиан возможно возникновение режима, при котором х1=x4 и x2=x3, поэтому вычисление величины Xg (3) приводит к получению нулевого результата даже при наличии погрешности масштабного коэффициента. Другими словами, предложенный в прототипе способ модуляции в некоторых режимах фактически приводит к временному размыканию дополнительного контура обратной связи, что, в свою очередь, может стать причиной накопления погрешности масштабного коэффициента и снижения точности измерительной системы.
Изобретение решает задачу повышения точности выходного сигнала волоконно-оптического гироскопа за счет устранения зависимости частоты формирования вспомогательного сигнала, предназначенного для оценки отклонения величины масштабного коэффициента, от величины текущей угловой скорости ВОГ.
Поставленная задача решается следующим образом. На фазовый модулятор подают ступенчатый импульсный сигнал напряжения, с помощью которого формируют модулирующий фазовый сигнал, состоящий из четырех циклически повторяющихся последовательных уровней Фm1, Фm2, Фm3, Фm4 длительностью  каждый, где τ - время обхода оптоволоконного контура, и чередуют Фm1 и Фm3 - сигналы компенсации фазового сдвига Саньяка со вспомогательными сигналами Фm2 и Фm4, уровень которых подбирают так, чтобы обеспечить наличие в сигнале фазовой разности лучей кольцевого интерферометра перепадов величиной 2π радиан, а величину соответствующих перепадов уровня сигнала с фотоприемного устройства используют в качестве сигнала обратной связи для стабилизации величины масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала. Для этого в течение первого
каждый, где τ - время обхода оптоволоконного контура, и чередуют Фm1 и Фm3 - сигналы компенсации фазового сдвига Саньяка со вспомогательными сигналами Фm2 и Фm4, уровень которых подбирают так, чтобы обеспечить наличие в сигнале фазовой разности лучей кольцевого интерферометра перепадов величиной 2π радиан, а величину соответствующих перепадов уровня сигнала с фотоприемного устройства используют в качестве сигнала обратной связи для стабилизации величины масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала. Для этого в течение первого  - интервала модулирующей последовательности по уровню Фm1 и одному или более предыдущим уровням сигнала компенсации фазового сдвига Саньяка методом прогнозной экстраполяции оценивают значение сигнала компенсации
- интервала модулирующей последовательности по уровню Фm1 и одному или более предыдущим уровням сигнала компенсации фазового сдвига Саньяка методом прогнозной экстраполяции оценивают значение сигнала компенсации  на третьем - интервале модулирующей последовательности, причем, если
на третьем - интервале модулирующей последовательности, причем, если  , то уровень вспомогательного сигнала на втором - интервале Фm2 устанавливают равным верхнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом - интервале Фm4 устанавливают равным (+2π-Фm1+Фm2+Фm3) радиан, если
, то уровень вспомогательного сигнала на втором - интервале Фm2 устанавливают равным верхнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом - интервале Фm4 устанавливают равным (+2π-Фm1+Фm2+Фm3) радиан, если  , то уровень вспомогательного сигнала на втором - интервале Фm2 устанавливают равным нижнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом - интервале Фm4 устанавливают равным (-2π-Фm1+Фm2+Фm3) радиан, если спрогнозированный сигнал
, то уровень вспомогательного сигнала на втором - интервале Фm2 устанавливают равным нижнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом - интервале Фm4 устанавливают равным (-2π-Фm1+Фm2+Фm3) радиан, если спрогнозированный сигнал  переходит верхний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем - интервале Фm3 на величину, равную -2π радиан, если спрогнозированный сигнал
переходит верхний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем - интервале Фm3 на величину, равную -2π радиан, если спрогнозированный сигнал  переходит нижний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем
переходит нижний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем  - интервале Фm3 на величину, равную +2π радиан, при этом в качестве сигнала обратной связи для стабилизации масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала используют перепад между уровнями сигнала на фотоприемном устройстве, соответствующими третьему и четвертому - интервалам модулирующей фазовой последовательности.
- интервале Фm3 на величину, равную +2π радиан, при этом в качестве сигнала обратной связи для стабилизации масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала используют перепад между уровнями сигнала на фотоприемном устройстве, соответствующими третьему и четвертому - интервалам модулирующей фазовой последовательности.
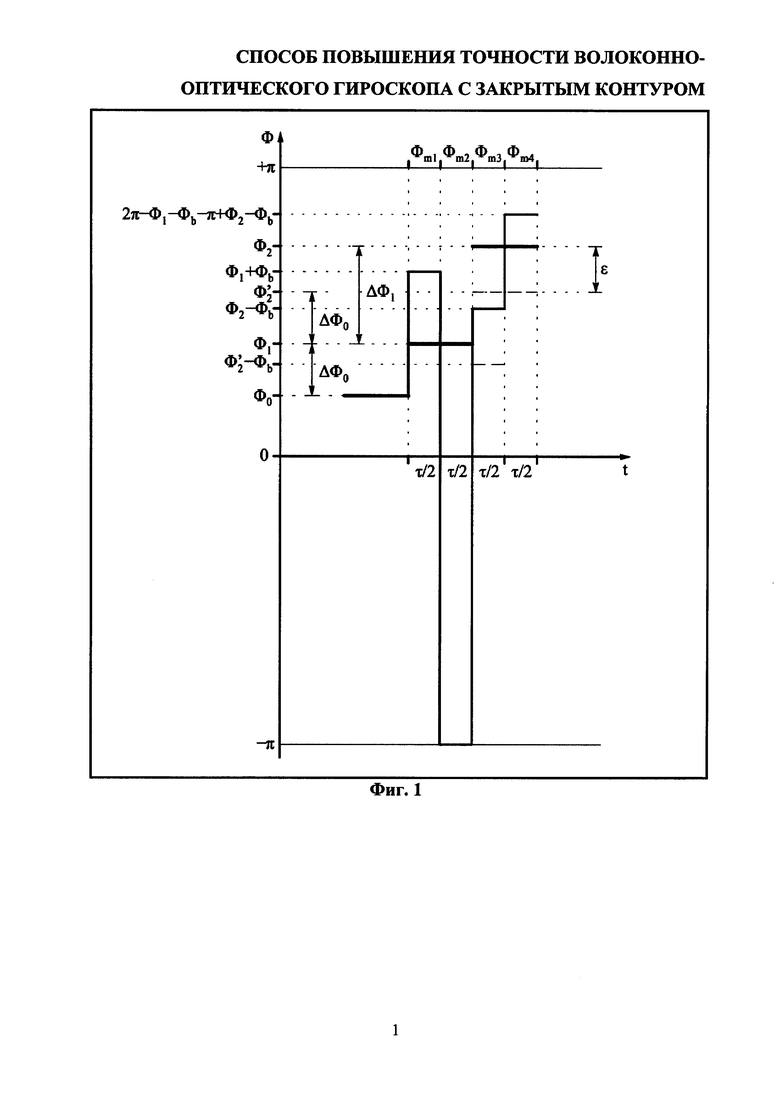
Сущность заявляемого способа поясняется следующим: сигнал фазовой модуляции содержит четыре последовательных уровня - Фm1, Фm2, Фm3, Фm4 длительностью каждый.
Уровень Фm1 формируют на основании базового уровня пилообразного сигнала с предыдущей итерации Ф0, величины сигнала обратной связи ΔФ0, а также сигнала квадратурной сдвигающей модуляции ±Фb. Для определенности примем, что на первых двух тактах последовательности Фm1 и Фm2 сдвигающая модуляция имеет положительную величину:

или

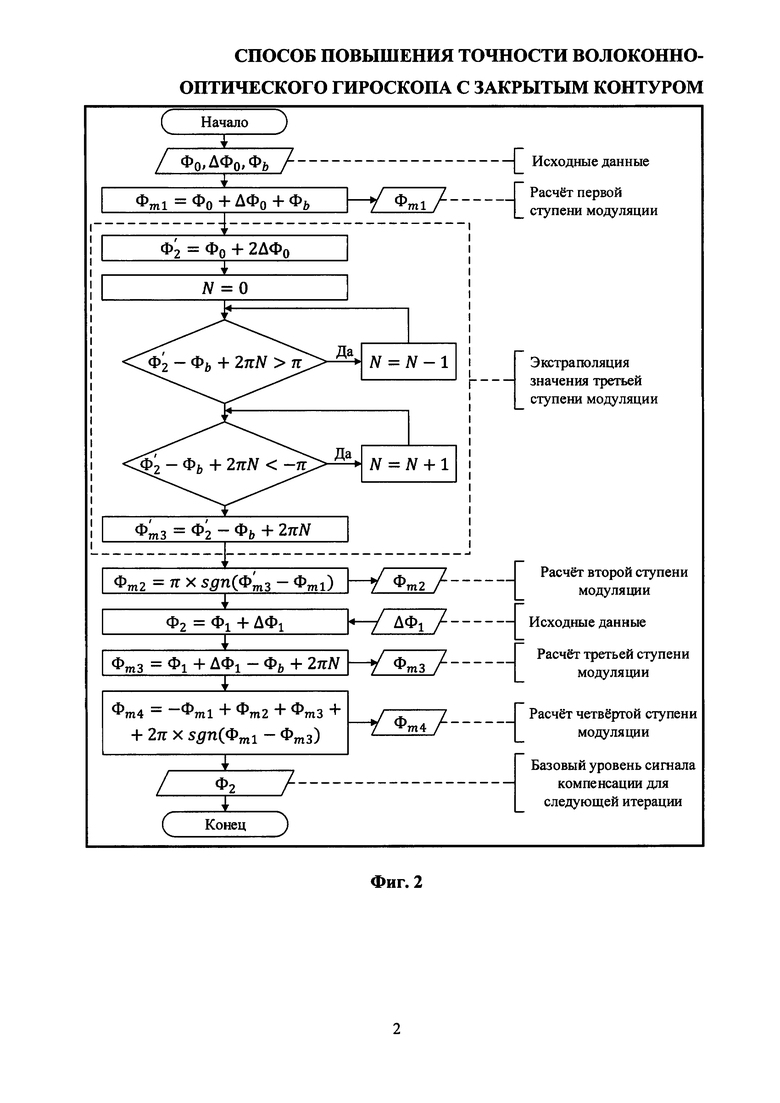
Уровень Фm2 формируют на основании результата прогнозной экстраполяции величины базового уровня модуляции на одну итерацию по двум или более предшествующим отсчетам. В простейшем случае используют метод линейной экстраполяции по двум отсчетам и определяют предполагаемую величину базового уровня  выражением:
выражением:

Если уровень  выходит за рамки диапазона ±π, его значение сдвигают на величину, соответствующую 2πN, где N - целое число, с целью удовлетворить условию:
выходит за рамки диапазона ±π, его значение сдвигают на величину, соответствующую 2πN, где N - целое число, с целью удовлетворить условию:

В результате формируют  - экстраполированное оценочное значение сигнала модуляции на третьем такте последовательности:
- экстраполированное оценочное значение сигнала модуляции на третьем такте последовательности:

Уровень Фm2 в этом случае принимает значение:


Уровень Фm3 формируют следующим образом:

или

Особенностью данного этапа расчета является то, что сброс уровня Фm3 осуществляют, ориентируясь не на фактическое значение Фm3, а на оценочное значение  .
.
Уровень Фm4 формируют следующим образом:

или

Результатом подачи на модулирующее устройство сигнала предлагаемой структуры является формирование фазоразностного сигнала, также содержащего четыре последовательных уровня: ΔФ1, ΔФ2, ΔФ3, ΔФ4. Нечетные уровни ΔФ1 и ΔФ3 соответствуют таковым в случае использования известного алгоритма квадратурной сдвигающей модуляции (Pavlath G.A. Closed-loop fiber optic gyros. SPIE v. 2837, 1996, pp. 46-60) и несут в основном информацию о величине невзаимного фазового сдвига Саньяка. Четные уровни ΔФ2 и ΔФ4 чередуются: уровень ΔФ2 не несет полезной информации, уровень ΔФ4 содержит в основном информацию об ошибке используемого в ВОГ масштабного коэффициента. Данный эффект достигается за счет формирования в фазоразностном сигнале сдвига, соответствующего предполагаемому значению 2π радиан. В этом случае различие между уровнями интенсивности  и
и  характеризует величину отклонения значения масштабного коэффициента, используемого в схеме модуляции в данный момент, от истинного, потому как сдвиг фазового сигнала на величину, точно соответствующую периоду интерференционной картины, не должен приводить к изменению сигнала интенсивности на фотоприемном устройстве.
характеризует величину отклонения значения масштабного коэффициента, используемого в схеме модуляции в данный момент, от истинного, потому как сдвиг фазового сигнала на величину, точно соответствующую периоду интерференционной картины, не должен приводить к изменению сигнала интенсивности на фотоприемном устройстве.
Сигналом обратной связи для системы стабилизации значения масштабного коэффициента служит величина  , определяемая соотношениями (15) или (16).
, определяемая соотношениями (15) или (16).


В случае аппаратной реализации подобной системы сигнал обратной связи используют для подстройки коэффициента усиления выходного сигнала модуляции (Pavlath G.A. Closed-loop fiber optic gyros. SPIE, v. 2837, 1996, pp. 46-60). При использовании единого цифрового блока обработки сигналов более простым является способ программного масштабирования модулирующего сигнала.
Процедуру экстраполяции в алгоритме используют для предварительной оценки уровня сигнала на следующем τ-интервале с целью выбрать направление и уровень дополнительного модулирующего сигнала, поэтому данный подход позволяет гарантировать возникновение в фазоразностном сигнале сдвига величиной 2π в необходимые моменты времени, однако следует отметить, что в случае возникновения ошибки экстраполяции, напряжение, требуемое для внесения компенсирующей разности фаз, может выйти за пределы диапазона модуляции, который в случае использования серродинной модуляции определяется значениями, соответствующими фазовым сдвигам -π радиан и +π радиан. Величина ошибки экстраполяции ε для текущего шага определяется разностью (17) и увеличивается с ростом величины углового ускорения ВОГ:

Данная особенность приводит к необходимости расширять диапазон модулирующего напряжения на величину, которая определяется динамическими характеристиками ВОГ, в частности величиной допустимого углового ускорения и коэффициентом обратной связи компенсационной схемы ВОГ.
Сущность заявляемого изобретения поясняется чертежами.
На Фиг. 1 показан фрагмент сигнала модуляции. Обозначения на фрагменте соответствуют обозначениям, использованным в описании алгоритма.
На Фиг. 2 показана блок-схема алгоритма модуляции с использованием линейной экстраполяции по двум отсчетам. Обозначения на блок-схеме соответствуют обозначениям, использованным в описании алгоритма.
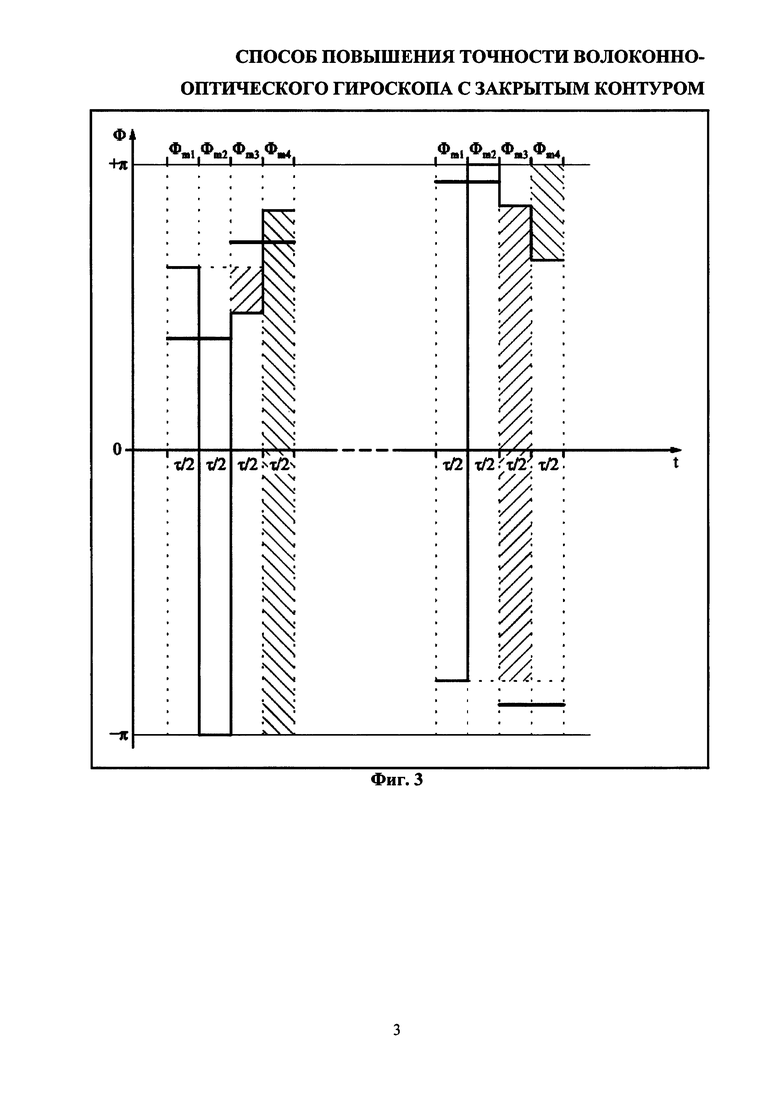
На Фиг. 3 приведены два фрагмента модулирующего сигнала, штриховкой в обоих случаях показаны разности Фm3-Фm1 и Фm4-Фm2. Согласно условиям (13) и (14) должно соблюдаться следующее равенство:

или

поэтому суммарная высота заштрихованных областей в обоих случаях должна соответствовать величине 2π. Два фрагмента Фm1…Фm4 демонстрируют форму модулирующего сигнала для двух случаев: для случая нарастания базового уровня компенсирующего фазового сигнала и для случая сброса базового уровня компенсирующего сигнала в момент достижения границы U+π диапазона модулирующего напряжения.
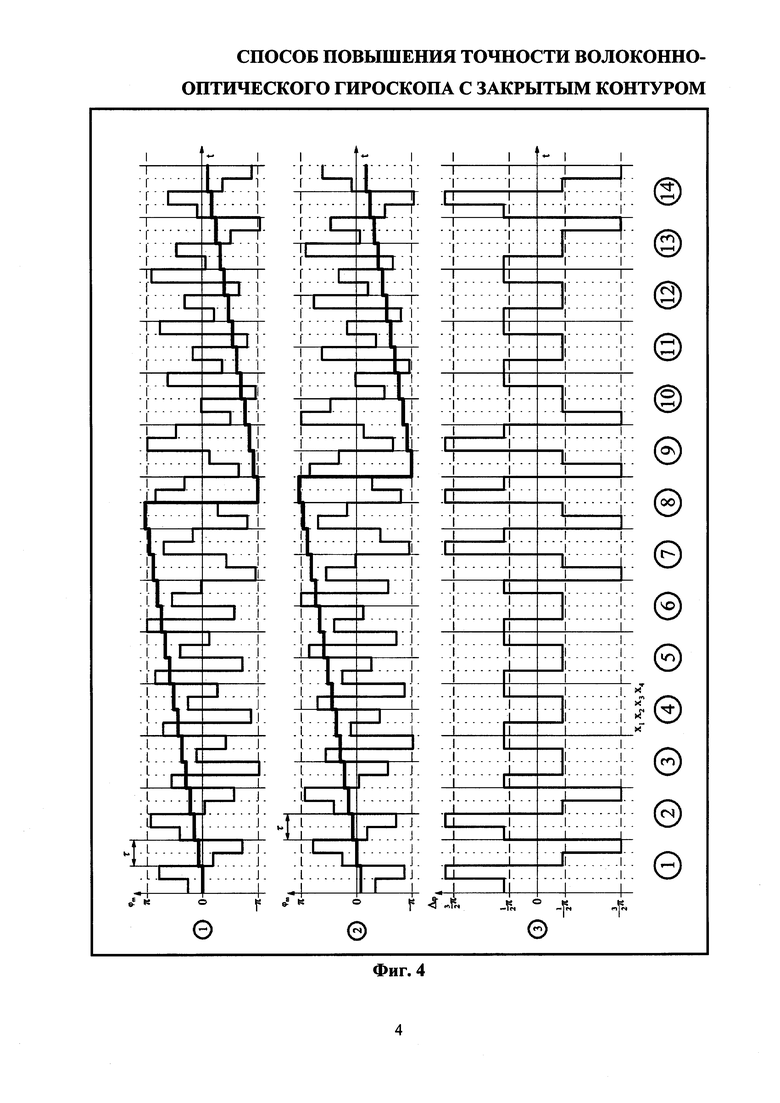
На Фиг. 4 показан механизм формирования фазоразностного сигнала в случае использования сигнала модуляции, описанного в прототипе, при постоянной величине фазового сдвига Саньяка. Амплитуда квадратурной сдвигающей модуляции составляет ±π/4 радиан, масштабный коэффициент модулятора на 10% отклоняется от своей истинной величины. Видно, что на некоторых интервалах фазоразностного сигнала соблюдаются соотношения х1=х4 и х2=х3, поэтому вычисление Xg через выражение (3) дает нулевой результат.
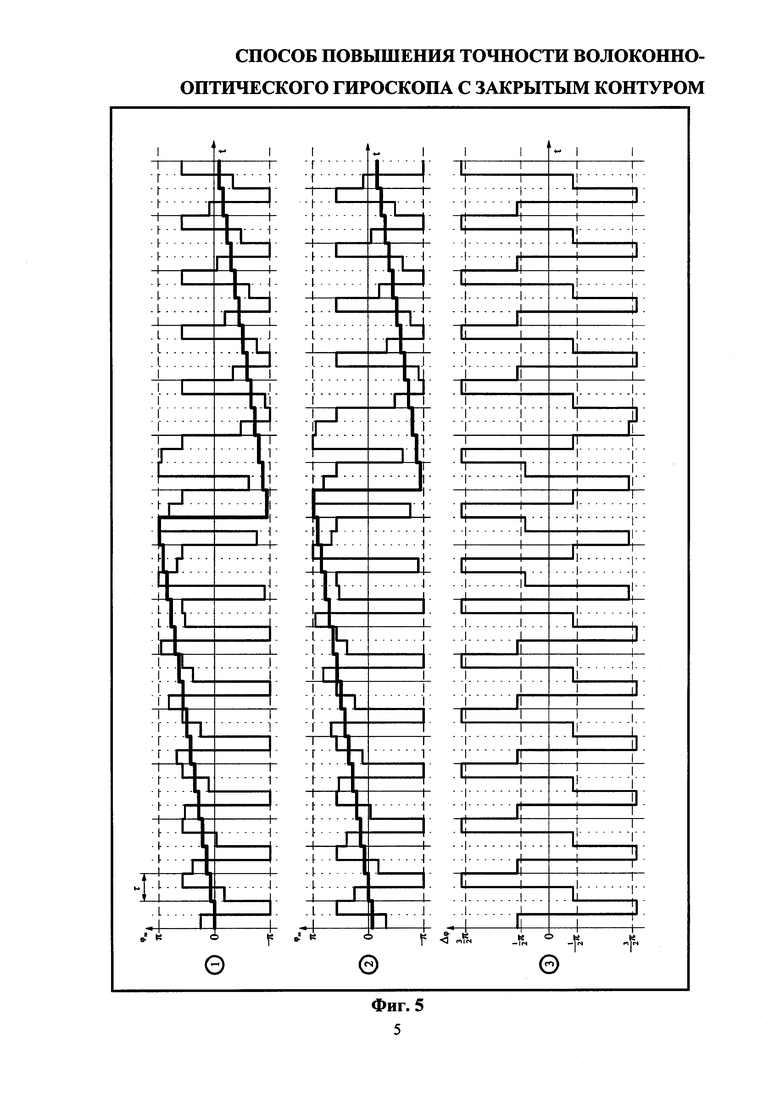
На Фиг. 5 показан механизм формирования фазоразностного сигнала в случае использования предлагаемого сигнала модуляции при постоянной величине фазового сдвига Саньяка. Амплитуда квадратурной сдвигающей модуляции составляет ±π/4 радиан.
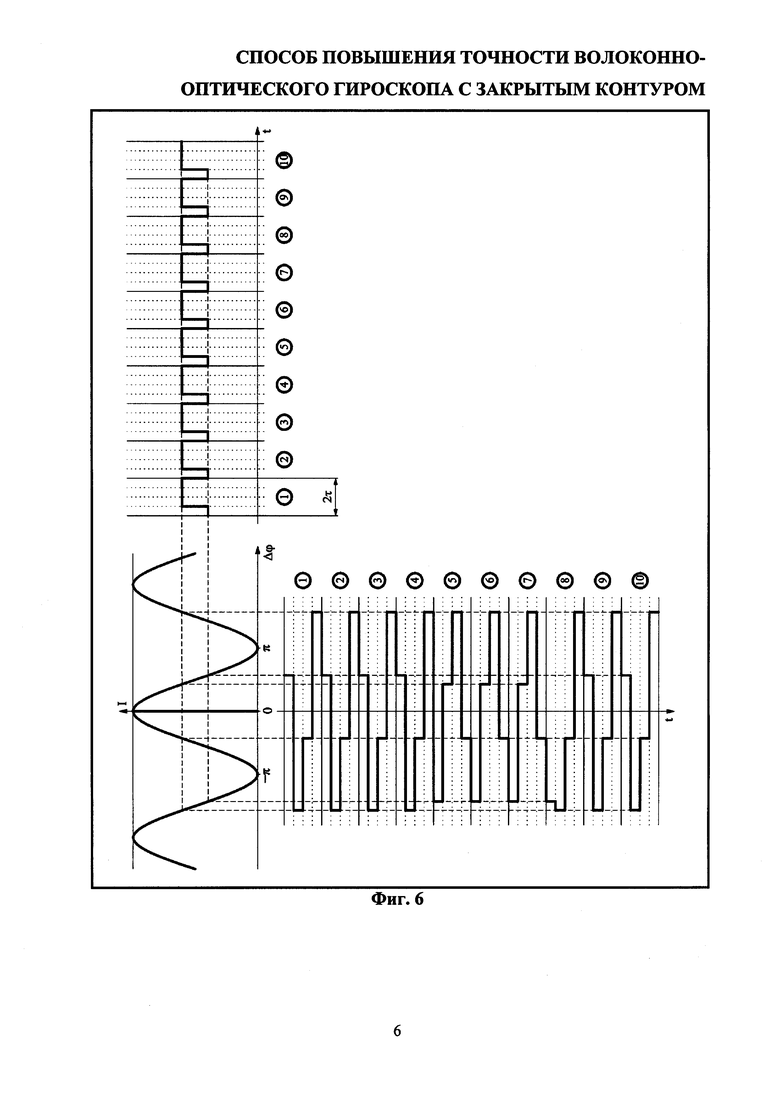
На Фиг. 6 показан выходной сигнал фотоприемного устройства в случае корректного значения U2π. Третий и четвертый такты выходной последовательности совпадают по уровню, поскольку сдвиг фазоразностного сигнала точно соответствует периоду интерференционного сигнала.
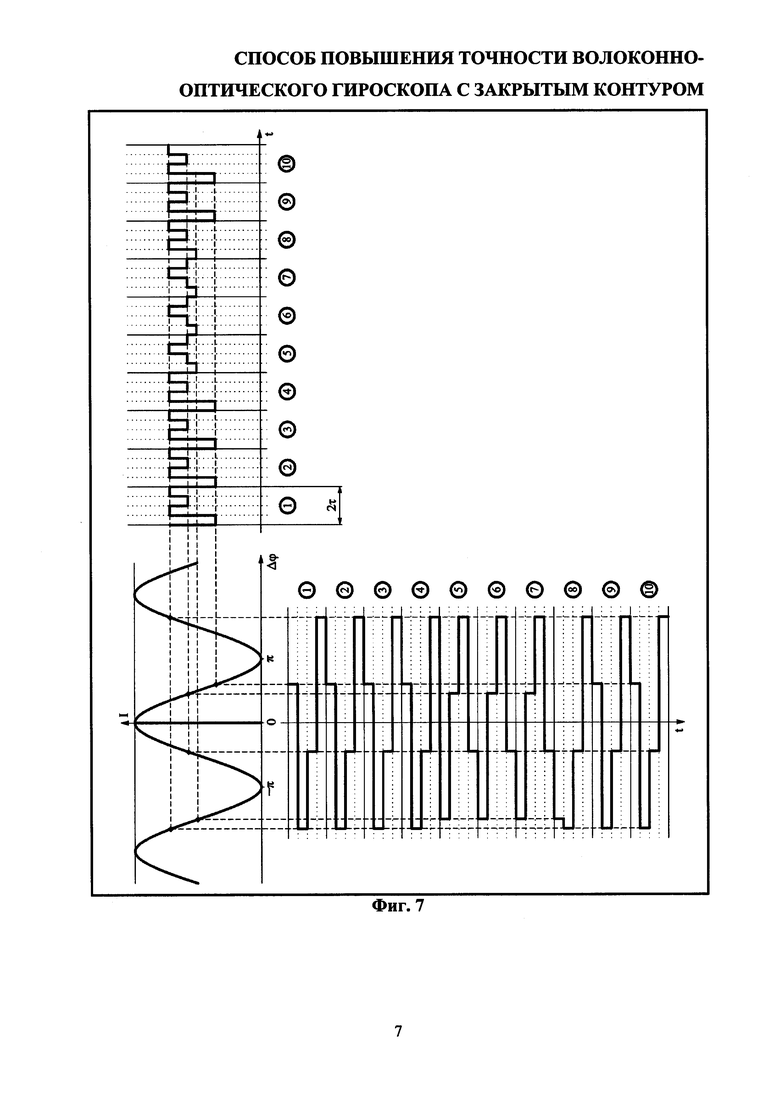
На Фиг. 7 показан выходной сигнал фотоприемного устройства в случае некорректного значения U2π. Третий и четвертый такты выходной последовательности имеют различные уровни, что обусловлено сдвигом фазоразностного сигнала на величину, отличную от периода интерференционного сигнала.
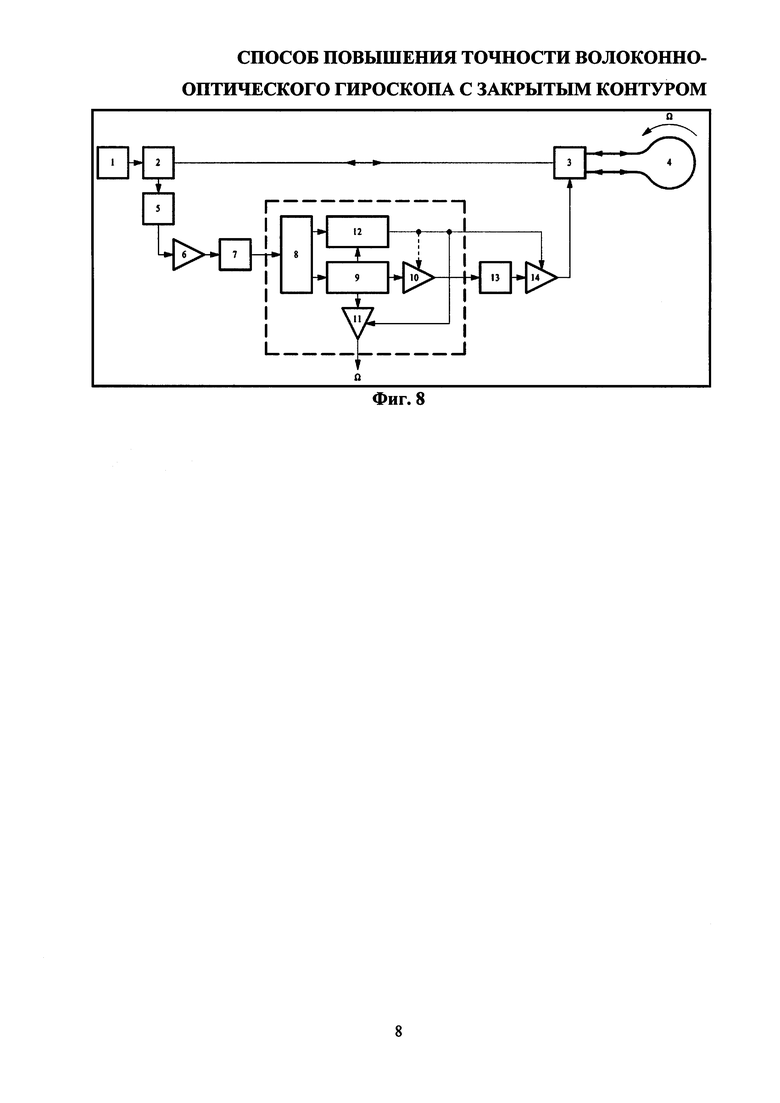
На Фиг. 8 показана структурная схема волоконно-оптического гироскопа с закрытым контуром, дополненная системой стабилизации масштабного коэффициента.
Предлагаемый способ может быть реализован с помощью устройства, представленного на фиг. 8. Волоконно-оптический гироскоп с закрытым контуром содержит источник широкополосного оптического излучения 1 (Фиг. 8), волоконный X-разветвитель 2, многофункциональную интегрально-оптическую схему 3 (МИОС) на основе монокристаллической пластины ниобата лития (LiNbO3), совмещающую Y-разветвитель, поляризатор и фазовый модулятор. Чувствительным элементом ВОГ является кольцевой оптоволоконный интерферометр 4. Цепь регистрации оптического сигнала ВОГ содержит фотоприемное устройство 5, электрическую схему усиления 6 и аналого-цифровой преобразователь 7. Схему цифровой обработки ВОГ, реализованную, как правило, на единой интегральной микросхеме, можно условно разделить на следующие программные блоки: блок цифровой демодуляции 8, блок генерации модулирующего сигнала 9 (цифровой генератор сигналов сложной формы), блок программного усиления модулирующего сигнала 10 (программный умножитель), блок программного усиления выходного сигнала ВОГ 11 (программный умножитель), блок подстройки масштабного коэффициента 12 (цифровой регулятор). Контур обратной связи замыкают цифроаналоговый преобразователь 13 и электрическая схема усиления 14.
Излучение от источника 1 поступает на вход X-разветвителя 2 и далее на вход схемы МИОС 3, где Y-разветвитель обеспечивает разделение входящего излучения на два луча равной интенсивности, каждый из которых далее обходит кольцевой интерферометр 4. После прохождения интерферометра лучи вновь объединяются в Y-разветвителе МИОС, суммарный луч проходит через X-разветвитель 2, после чего поступает на фотоприемное устройство 5, регистрирующее циклическую последовательность сигналов интенсивности  ,
,  ,
,  ,
,  , соответствующую последовательности фазовых разностей лучей интерферометра ΔФ1, ΔФ2, ΔФ3, ΔФ4. Ток фотоприемного устройства 5 проходит через схему усиления 6 и попадает на аналого-цифровой преобразователь 7. Цифровой сигнал далее поступает в блок цифровой демодуляции 8, который обеспечивает регистрацию отдельных уровней интенсивности интерференционного сигнала , , , . Блок генерации модулирующего сигнала 9 формирует несколько сигналов:
, соответствующую последовательности фазовых разностей лучей интерферометра ΔФ1, ΔФ2, ΔФ3, ΔФ4. Ток фотоприемного устройства 5 проходит через схему усиления 6 и попадает на аналого-цифровой преобразователь 7. Цифровой сигнал далее поступает в блок цифровой демодуляции 8, который обеспечивает регистрацию отдельных уровней интенсивности интерференционного сигнала , , , . Блок генерации модулирующего сигнала 9 формирует несколько сигналов:
- Представленный циклической последовательностью Фm1, Фm2, Фm3 и Фm4 импульсный модулирующий сигнал, в состав которого входят пилообразный сигнал компенсации, совмещенный с сигналом вспомогательной квадратурной модуляции (уровни Фm1 и Фm3), а также вспомогательный сигнал, предназначенный для оценки величины отклонения МК (уровни Фm2 и Фm4);
- Выходной сигнал вращения, пропорциональный угловой скорости ВОГ и равный по величине фазовому сдвигу Саньяка.
Выходной сигнал модуляции масштабируется блоком программного усиления модулирующего сигнала 10 и поступает на цифроаналоговый преобразователь 13, после чего проходит через электрическую схему усиления 14 и подается на входящий в состав МИОС фазовый модулятор, замыкая таким образом главный контур обратной связи ВОГ. Блок подстройки масштабного коэффициента 12 осуществляет сравнение уровней интенсивности  и и регулирует коэффициент программного усиления блока 10 или коэффициент усиления электрической схемы усиления 14 с целью привести разность уровней и к нулевому значению и таким образом стабилизировать текущее значение масштабного коэффициента. Блок программного усиления выходного сигнала 11 приводит выходной сигнал вращения с блока генерации модулирующего сигнала 9 к необходимым единицам измерения угловой скорости.
и и регулирует коэффициент программного усиления блока 10 или коэффициент усиления электрической схемы усиления 14 с целью привести разность уровней и к нулевому значению и таким образом стабилизировать текущее значение масштабного коэффициента. Блок программного усиления выходного сигнала 11 приводит выходной сигнал вращения с блока генерации модулирующего сигнала 9 к необходимым единицам измерения угловой скорости.
Таким образом, заявляемое решение приводит к повышению точности выходного сигнала ВОГ за счет устранения зависимости частоты формирования вспомогательного сигнала, предназначенного для оценки величины отклонения масштабного коэффициента, от текущего значения угловой скорости и исключения возможности возникновения режимов вращения ВОГ, нарушающих работу алгоритма стабилизации масштабного коэффициента.
Изобретение относится к области приборостроения и может быть использовано при создании волоконно-оптических гироскопов и других фазовых интерферометрических датчиков физических величин, построенных на основе интерферометра Саньяка. Технический результат - повышение точности. Для этого в волоконно-оптическом гироскопе обеспечивают условия устранения зависимости частоты формирования вспомогательного сигнала, предназначенного для оценки величины отклонения масштабного коэффициента, от текущего значения угловой скорости и исключения возможности возникновения режимов вращения гироскопа, нарушающих работу алгоритма стабилизации масштабирующего коэффициента. 8 ил.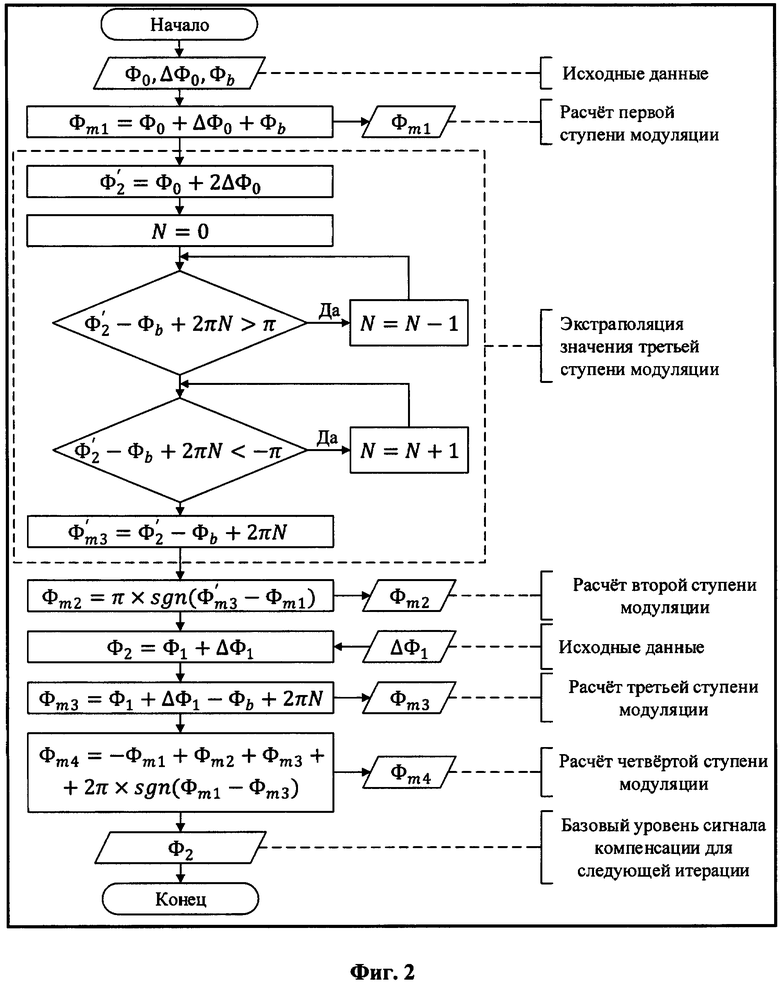
Способ повышения точности волоконно-оптического гироскопа с закрытым контуром, заключающийся в том, что путем подачи на фазовый модулятор ступенчатого импульсного сигнала напряжения формируют модулирующий фазовый сигнал, состоящий из четырех циклически повторяющихся последовательных уровней Фm1, Фm2, Фm3, Фm4 длительностью  каждый, где τ - время обхода оптоволоконного контура, и чередуют Фm1 и Фm3 - сигналы компенсации фазового сдвига Саньяка со вспомогательными сигналами Фm2 и Фm4, уровень которых подбирают так, чтобы обеспечить наличие в сигнале фазовой разности лучей кольцевого интерферометра перепадов величиной 2π радиан, а величину соответствующих перепадов уровня сигнала с фотоприемного устройства используют в качестве сигнала обратной связи для стабилизации величины масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала, отличающийся тем, что в течение первого
каждый, где τ - время обхода оптоволоконного контура, и чередуют Фm1 и Фm3 - сигналы компенсации фазового сдвига Саньяка со вспомогательными сигналами Фm2 и Фm4, уровень которых подбирают так, чтобы обеспечить наличие в сигнале фазовой разности лучей кольцевого интерферометра перепадов величиной 2π радиан, а величину соответствующих перепадов уровня сигнала с фотоприемного устройства используют в качестве сигнала обратной связи для стабилизации величины масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала, отличающийся тем, что в течение первого  - интервала модулирующей последовательности по уровню Фm1 и одному или более предыдущим уровням сигнала компенсации фазового сдвига Саньяка методом прогнозной экстраполяции оценивают значение сигнала компенсации
- интервала модулирующей последовательности по уровню Фm1 и одному или более предыдущим уровням сигнала компенсации фазового сдвига Саньяка методом прогнозной экстраполяции оценивают значение сигнала компенсации  на третьем
на третьем  - интервале модулирующей последовательности, причем если
- интервале модулирующей последовательности, причем если  , то уровень вспомогательного сигнала на втором
, то уровень вспомогательного сигнала на втором  - интервале Фm2 устанавливают равным верхнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом
- интервале Фm2 устанавливают равным верхнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом  - интервале Фm4 устанавливают равным (+2π-Фm1+Фm2+Фm3) радиан, если
- интервале Фm4 устанавливают равным (+2π-Фm1+Фm2+Фm3) радиан, если  , то уровень вспомогательного сигнала на втором
, то уровень вспомогательного сигнала на втором  - интервале Фm2 устанавливают равным нижнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом
- интервале Фm2 устанавливают равным нижнему пределу 2π - диапазона модуляции, а уровень вспомогательного сигнала на четвертом  - интервале Фm4 устанавливают равным (-2π-Фm1+Фm2+Фm3) радиан,
- интервале Фm4 устанавливают равным (-2π-Фm1+Фm2+Фm3) радиан,
если спрогнозированный сигнал  переходит верхний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем
переходит верхний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем  - интервале Фm3 на величину, равную - 2π радиан, если спрогнозированный сигнал
- интервале Фm3 на величину, равную - 2π радиан, если спрогнозированный сигнал  переходит нижний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем
переходит нижний предел 2π - диапазона модуляции, то осуществляют сброс сигнала компенсации на третьем  - интервале Фm3 на величину, равную +2π радиан, при этом в качестве сигнала обратной связи для стабилизации масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала используют перепад между уровнями сигнала на фотоприемном устройстве, соответствующими третьему и четвертому
- интервале Фm3 на величину, равную +2π радиан, при этом в качестве сигнала обратной связи для стабилизации масштабного коэффициента путем подстройки коэффициента усиления генератора модулирующего сигнала используют перепад между уровнями сигнала на фотоприемном устройстве, соответствующими третьему и четвертому  - интервалам модулирующей фазовой последовательности.
- интервалам модулирующей фазовой последовательности.
| US 5141316 А1, 25.08.1992 | |||
| Pavlath G.A | |||
| Closed-loop fiber optic gyros | |||
| SPIE v | |||
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МЕТАЛЛОВ | 1925 |
|
SU2837A1 |
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2522147C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2444704C1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА С ЗАКРЫТЫМ КОНТУРОМ | 2012 |
|
RU2512599C1 |

