изобретение относится к технике автоматического управления технологическими процессами, в частности к системам релей- но-импульсного регулирования параметров (температуры, влажности, расхода жидкости и др.) технологических процессов, и может быть использовано для высокоточного программного перемещения (позиционирования) исполнительных механизмов систем автоматического управления калориферными, котельными и другими тепловыми агрегатами и установками.
Цель изобретения - повышение точности регулирования.
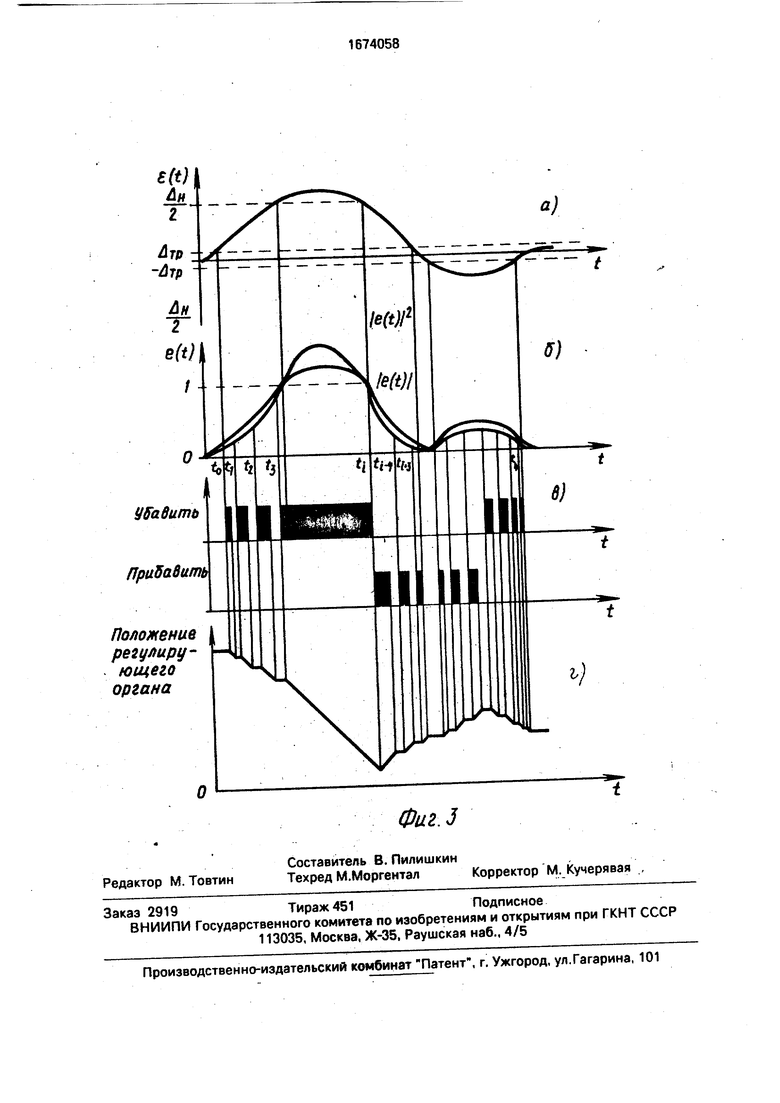
На фиг. 1 приведен пример схемы реализации релейно-импульсного регулятора; на фиг. 2 - пример применения предлагаемого устройства в системе программного термостатирования (регулирования температуры) инерционного объекта; на фиг. 3 а - кривая переходного процесса регулирования; б - кривые изменения значений нормированной (масштабированной) ошибки регулирования; в - реакция исполнительного механизма; г - график изменения положения регулирующего органа.
Регулятор устроен следующим образом (фиг. 1).
(
VJ
О 01 00
Вход регулятора соединен с первым входом сумматора 1, с входами управляемых ключей 2 и 3, с входом блока определения абсолютных значений 4 и входом детектора полярности 5, первый выход которого соединен с входом логического элемента И 6, а второй выход - с входом логического элемента И 7. Вторые входы логических элементов И 6 и 7 объединены с входом логического элемента НЕ 8 и соединены с выходом релейного элемента 9, вход которого объединен с входом релейного элемента 10, с входом блока возведения (значения сигнала ошибки регулирования) в квадрат 11, входом электронных ключей 12, 13 и соединен с выходом датчика определения нормированных абсолютных значений сигнала ошибки регулирования 4, Выход электронного ключа 12 соединен через элемент аналоговой памяти 14 и электронный ключ 15 с первым входом сумматора 16. Второй вход сумматора 16 соединен с выходом электронного ключа 17, вход которого соединен через элемент аналоговой памяти 18 с выходом электронного ключа 13. На третий вход сумматора 16 подается постоянное напряжение (+Е) от источника эталон- ных напряжений 19. Выход блока возведения значений нормированной ошибки регулирования в квадрат 11 соединен через цепь последовательного соединения электронного ключа 20, элемента аналоговой памяти 21 и электронного ключа 22 с первым входом сумматора 23, а через цепь последовательного соединения электронного ключа 24, элемента аналоговой памяти 25 и электронного ключа 26 - с вторым входом сумматора 23, на третий вход которого подается постоянное напряжение (+Е) от источника эталонных напряжений 19. Второй вход сумматора 1 соединен через последовательную цепь из электронного ключа 27 и элемента аналоговой памяти 28 с выходом электронного ключа 2. Третий вход сумматора 1 соединен с выходом электронного ключа 29, вход которого через элемент аналоговой памяти 30 соединен с выходом электронного ключа 3, Выход сумматора 1 соединен с входом детектора полярности 31, первый вход которого соединен с входом логического элемента И 32, а второй выход - с входом логического элемента И 33. Вторые входы логических элементов И 32 и 33 соединены с выходом блока формирования длительности импульсов (управляющих воздействий) 34, вход которого соединен через электронный ключ 35 с выходом сумматора 23. Управляющий вход электронного ключа 35 соединен с выходом логического элемента И 36, первый
вход которого соединен с выходом логического элемента НЕ 8, второй вход - с выходом релейного элемента 10, а третий - с выходом блока формирования импульсов
(управляющих воздействий) 37, вход которого соединен с выходом сумматора 16. Управляющие входы электронных ключей 12, 17, 20, 26, 2 и 29, а также вход сброса элементов аналоговой памяти 14 и 21 соединены с первым выходом триггера 38, второй вход которого соединен с управляющими входами электронных ключей 13, 15, 22, 24, 27, 3 и с входом сброса элементов аналоговой памяти 18 и 25. Вход триггера 38
соединен с выходом блока формирования длительности периода следования импульсных управляющих воздействий 37. Выходы логических элементов И 6 и 32 соединены соответственно с первым и вторым входом
логического элемента ИЛИ 39, а выходы логических элементов И 7 и 33, соединены соответственно с первым и вторым входом логического элемента ИЛИ 40.
Выходы логических элементов ИЛИ 39
и 40 являются выходами регулятора и предназначены для управления исполнительным механизмом регулирующего органа системы автоматического регулирования.
В представленной на фиг. 2 схеме системы программного регулирования температуры инерционного объекта приняты следующие обозначения: 41 - объект управления (регулирования); F(t) - возмущающие
воздействия; 42 - датчик температуры; 43 - программно-задающее устройство, 44 - сумматор; 45 - регулятор; 46 - исполнительный механизм; 47 - регулирующий орган. При отключении регулируемой величины от задания в ту или иную сторону от допустимой ошибки регулирования на выходе регулятора формируются импульсные управляющие воздействия (фиг. 3 в), которые, поступая на исполнительный механизм, перемещают регулирующий орган в сторону компенсации возмущений, вызывающих данное отклонение в объекте управления. При этом в зоне нечувствительности трехпозиционного регулирования АН, величина которой контролируется установкой зоны срабатывания релейного элемента 9 (фиг. 1), при превышении сигнала ошибки регулирования допустимой величины Дгр, определяемой величиной зоны срабатывания релейного элемента 10, осуществляется импульсное регулирование. В области значений I e(t) IE(/W2 ,со) (соответственно le (t)l E (1,«) осуществляется непрерывное релейное регулирование.
Рассмотрим процесс формирования периода, длительности и полярности управляющих воздействий в те моменты времени, когда абсолютное значение ошибки регулирования |e(t) I Ан/2 и соответствующее ей нормированное значение le (t) l 1. Предполагается, что нормирование сигнала ошибки регулирования осуществляется с коэффициентом Д - Лн/2. Формирование длительности периода следования управляющих воздействий осуществляется для всех значений e(t). Пусть в исходном положении триггер 38 находится в единичном состоянии. Тогда электронные ключи 13, 15, 22, 24, 27 и 3 будут замкнуты, а ключи 12, 17, 20. 26, 2 и 29 разомкнуты. В этом случае на вход блока формирования импульсов (управляющих воздействий) 37 будет поступать постоянное напряжение
U,(,rUi + E.(1)
Ч
где1Л / le(t)l dt - значение напряжения, ti-1
получаемого в результате выполнения операции интегрирования абсолютных значений сигнала ошибки регулирования на предшествующем временном интервале (периоде) Тм интегрирующим звеном элемента аналоговой памяти 14;
Е - постоянное напряжение, поступающее от источника эталонных напряжений 19, величина которого может быть выбрана, например, из интервала значений с нижней границей, определяемой инерционностью используемого механизма (например, для компенсации его инерционности), и верхней границей, определяемой как
1 I (KF Рмакс).
где Рмакс - максимальная частота изменения сигнала ошибки регулирования;
Кр - постоянный коэффициент, который согласно теореме отсчета во временном представлении непрерывных сигналов в дискретной форме,иначе теореме Котельнико- ва, может быть задан - Кр 2.
В силу этого верхняя граница значений данного интервала может быть выбрана из необходимого условия обеспечения эквивалентности представления непрерывного сигнала своими дискретными значениями, обеспечивая отработку сигнала ошибки регулирования с наименьшими потерями информации. В соответствии со значениями Ui и Е на выходе блока формирования длительности управляющих воздействий 37 будет сформирован импульс длительностью
Ti Кфиф| Кф I / le(t)I dt 4- Е 1 . wi-1
где К - коэффициент передачи блока формирования длительности управляющих воздействий 37.
Во время действия данного TI периода
5 на интегрирующее звено элемента аналоговой памяти 18 через замкнутый электронный ключ 13 поступают сигналы, равные значению модуля сигнала ошибки регулирования le(t)l. В результате для последующе10 го периода TI+I за время действия Ti будет формироваться UIH. как
ч +TI
Un-1- / le(t)l dt,(3)
ч
15 По истечении временного интервала длительностью, равной TI, блок формирования длительности периода следования импульсов (управляющих воздействий) 37 установит триггер 38 в нулевое состояние.
20 Это приведет к переключению электронных ключей, а именно, ключи 12, 17, 20, 26, 2 и 29 будут переведены из разомкнутого состояния в замкнутое, ключи 13, 15, 22, 24, 27 и 3 из замкнутого в рэзомкнутое состояние.
25 Одновременно с переключением ключей значение напряжения, накопленное на интеграторе элемента аналоговой памяти 18, будет сброшено (установлено равным нулю). При реализации интегрирования с ис30 пользованием емкостных накопителей сброс может быть осуществлен, например, кратковременным закорачиванием емкостных накопителей элементов аналоговой памяти. Соответственно, при следующем
35 переключении электронных ключей будет сброшено напряжение на интеграторе элемента аналоговой памяти 14. Описанные выше последовательности операций будут непрерывно повторяться в функциональной
40 зависимости от изменения сигнала ошибки регулирования Е (t). При этом на каждом из периодов Ti на вход логического элемента И 36 от блока 37 будет подаваться разрешающий сигнал на включение электронного
45 ключа 35, коммутирующего входную цепь блока формирования длительности импульсов управляющих воздействий 34. В моменты окончания каждого периода TI и начала следующего интервала времени TI+I, состав50 ляющие незначительный по продолжительности промежуток времени (длительность каждого из которых определяется в основном инерционностью используемой элементной базы), формируется сигнал, до55 статочный для отключения электронного ключа 35. Этим обеспечивается синхронизация работы блока 37 и блока 34 формирования длительности импульсов (управляющих воздействий) для всех интервалов времени Ti, 1 1.2... .
Процесс формирования напряжений на входе блока формирования длительности импульсов (управляющих воздействий) 34 реализован по схеме, аналогичной с вышеописанной на входе блока 37 с тем лишь отличием, что формирование длительности импульса управляющих воздействий осуществляется в соответствии со значением оценки интегрального изменения квадрата сигнала ошибки регулирования le (t)l и во все периоды Т|, для которых Дгр le(t)l Дн/2. Контроль за выполнением этих условий реализован с помощью логического элемента И 36, управляющего состоянием электронного ключа 35 в соответствии с сигналами, поступающими от блока формирования длительности импульсов 37 релейных элементов 9 и 10, контролирующих соответственно значения Дн/2 и Д-р.
На выходах детектора полярности 31 будут сформированы сигналы, осуществляющие с помощью схем совпадения логических элементов И 32 и 33 формирование знака полярности управляющих воздействий (Убавить и Прибавить). При этом формирование знака управляющих воздействий будет осуществляться на основе сигнала, получаемого на выходе сумматора 1, равного V(t) Ј (t) - Ј (ST ), что эквивалентно непрерывному слежению за изменением знака скорости изменения сигнала ошибки регулирования. Кроме этого, благодаря величине гистерезиса детектора полярности 31 и элементов аналоговой памяти 28 и 30, при формировании управляющих воздействий обеспечивается запоминание знака данного сигнала V(t) в момент окончания предшествующего временного ин- терв.ала формирования управляющих воздействий. А это, в те моменты времени
когда --it О полностью исключает потерю информации о величине рассогласования, этим способствуя повышению точности регулирования не только в динамическом, но и в статическом режимах работы систем автоматического регулирования. Таким образом, эффект повышения точности регулирования достигается, в основном, благодаря тому, что число квантованных уровней в зоне нечувствительности трехпо- зиционного регулирования заранее не задается, а определяется в процессе отработки программно-задающих воздействий. При этом квантованию подвергается величина зоны нечувствительности трехпозиционно- го регулирования в зависимости от времени, в течение которого сигнал ошибки
регулирования находится в зоне нечувствительности трехпозиционного регулирования.
В данном устройстве все параметры управляющих воздействий определены через основные интегральные критерии, предъявляемые к качеству регулирования. А именно, через значения ошибки регулирования и ее квадрата. При этом эти
характеристики качества регулирования контролируются на каждом из интервалов времени регулирования, число и длительность которых определяется и корректируется на основе получаемых значений
оценок, определяющих величину рассогласования. Кроме этого, реализация в регулирующих устройствах данного способа автоматического регулирования возможна на основе использования минимального
числа варьируемых параметров (иначе, органов настройки). Например, на основе выбора нормирующего (масштабирующего) делителя в качестве единственного или основного органа настройки. А именно, можно
совместить его значения и, соответственно. его изменение с уставкой величины зоны нечувствительности трехпозиционного регулирования - Дн/2. В результате такого совмещения все остальные параметры
регулирующего устройства будут связаны с установкой одного параметра - нормирующего делителя, так как одновременное изменение нормирующего делителя и величины зоны нечувствительности повлечет
прямо и косвенно изменение всех остальных варьирующих параметров. При этом степень зависимости изменения каждого из параметров можно раздельно установить как перед включением в работу регулирующего устройства, так и непосредственно во время регулирования.
Формула изобретения Релейно-импульсный регулятор, содержащий первый и второй формирователи длительности импульсов, элемент НЕ, первый и второй элементы ИЛИ, выходы которых являются соответственно выходами регулятора Убавить и Прибавить, о т л ичающийся тем, что. с целью повышения точности регулирования, в него введены источник эталонного напряжения, два детектора полярности, пять элементов И, два релейных элемента, блок возведения в квадрат, триггер, блок определения абсолютных значений, три сумматора, шесть элементов аналоговой памяти и тринадцать ключей, информационные входы первого и второго ключей соединены с входами блока возведения в квадрат, первого и второго релейных
элементов и с выходом блока определения абсолютных значений, вход которого является входом регулятора и соединен с входом первого детектора полярности, с информационными входами третьего и четвертого ключей и с суммирующим входом первого сумматора, первый вычитающий вход которого соединен с выходом пятого ключа, информационный вход которого соединен через первый элемент аналоговой памяти - с выходом четвертого ключа, второй вычитающий вход первого сумматора соединен с выходом шестого ключа, информационный вход которого через второй элемент аналоговой памяти соединен с выходом третьего ключа, выход первого сумматора соединен с входом второго детектора полярности, первый и второй выходы которого соединены с первыми входами соответственно первого и второго элементов И, вторые входы которых соединены с выходом первого формирователя длительности импульсов, вход которого соединен с выходом седьмого ключа, информационный вход которого соединен с выходом второго сумматора, первый вход которого соединен с выходом восьмого ключа, информационный вход которого соединен с выходом третьего элемента аналоговой памяти, информационный вход которого соединен с выходом девятого ключа, информационный вход которого соединен с выходом блока возведения в квадрат, второй вход второго сумматора соединен с выходом десятого ключа, информационный вход которого соединен с выходом четвертого элемента аналоговой памяти, информационный вход которого соединен с выходом одиннадцатого ключа, информационный вход которого соединен с выходом блока возведения в квадрат, третий вход второго сумматора соединен с выходом источника
эталонного напряжения и с первым входом третьего сумматора, второй вход которого соединен с выходом двенадцатого ключа, информационный вход которого соединен с
входом пятого элемента аналоговой памяти, информационный вход которого соединен с выходом второго ключа, третий вход третьего сумматора соединен с выходом тринадцатого ключа, информационный вход
которого соединен с входом шестого элемента аналоговой памяти, информационный вход которого соединен с выходом первого ключа, выход третьего сумматора соединен с входом второго формирователя
длительности импульсов, выход которого соединен со счетным входом триггера и с первым входом третьего элемента И, второй вход которого соединен с выходом второго релейного элемента, а третий - с выходом
элемента НЕ, вход которого соединен с выходом первого релейного элемента и с первыми входами четвертого и пятого элементов И, вторые входы которых соединены соответственно с первым и вторым
выходами первого детектора полярности, а выходы - с первыми входами соответственно первого и второго элементов ИЛИ, вторые входы которых соединены соответственно с выходами первого и второго элементов И, управляющие входы первого, третьего, восьмого, одиннадцатого и двенадцатого ключей соединены с входами Сброс четвертого и шестого элементов аналоговой памяти и с прямым выходом
триггера, инверсный выход которого соединен с управляющими входами второго, четвертого, шестого, девятого и десятого ключей и с входами Сброс третьего и пятого элементов аналоговой памяти, управляющий вход седьмого ключа соединен с выходом третьего элемента И.
Выход



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электродвигателем с вентильным преобразователем и устройство для его осуществления | 1990 |
|
SU1833956A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2013 |
|
RU2531530C1 |
| Устройство для регулирования интенсивности потока выводимых частиц при медленном выводе пучка из синхротрона | 1985 |
|
SU1362388A1 |

Изобретение относится к технике автоматического регулирования. Цель изобретения - повышение точности регулирования. Изобретение позволяет повысить точность регулирования за счет совмещения трехпозиционного регулирования в зоне "больших" рассогласований и импульсного регулирования в зоне "малых" рассогласований. Зону нечувствительности трехпозиционного регулирования квантуют на число уравнений, которое зависит от количества интервалов времени, в течение которых сигнал ошибки регулирования находится в этой зоне. В начале каждого интервала времени формируют одиночный импульс, длительность и период следования которого зависят от основных характеристик качества регулирования от интегральных значений модуля и квадрата сигнала ошибки регулирования за предшествующий интервал времени. Полярность одиночного импульса устанавливают в соответствии со знаком разности между текущим значением сигнала ошибки регулирования и ее значением в момент окончания предшествующего интервала времени. Количество интервалов времени устанавливают равным числу периодов следования одиночных импульсов. 3 ил.
47
Фиг.1
t C
42
45
L At
2
Положение регулирующегооргана
)
)
| Кунцевич В.М., Чеховой Ю.Н | |||
| Нелинейные системы управления с частотно-широт- но-импульсной модуляцией | |||
| Киев, Техника, 1970, с | |||
| Насос | 1917 |
|
SU13A1 |
| 0 |
|
SU337758A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
