Изобретение относится к области автоматического управления динамическими объектами.
Известен способ управления морским судном, оснащенным установленными на управляемой поворотной платформе движителями, обеспечивающий управление угловыми и линейными перемещениями судна по заданным пространственным траекториям, при этом пространственная ориентация вектора результирующей тяги его движителей, обеспечивающего реальные перемещения морского судна, автоматически формируется поворотной платформой, изменяющей ориентацию осей тяги движителей относительно продольной оси судна, с учетом текущих значений его углов курса, крена и дифферента (US 2007/0078575 А1, G05D 1/100, опубл. 05.04.2007 на 14 с.).
Недостатком указанного способа управления является то, что управление перемещениями судна по пространственным траекториям невозможно без изменения пространственной ориентации судна, при этом схема установки движителей судна должна обеспечивать управление его углами курса, крена и дифферента. Поэтому указанный способ управления не может использоваться для управления пространственными перемещениями подводного аппарата (ПА), схема установки движителей которого не позволяет управлять его углами крена и дифферента. Кроме того, указанный способ управления предполагает управление угловыми перемещениями морского судна для устранения нежелательных (непредсказуемо появляющихся) углов крена и дифферента, поэтому использование этого способа управления для управления линейными пространственными перемещениями ПА, углы крена и дифферента которого возникают под влиянием значительных внешних силовых и моментных воздействий, неэффективно по причине больших затрат энергии на устранение нежелательных углов крена и дифферента, что особенно актуально для автономных ПА. При этом указанный способ управления нельзя использовать для управления ПА, который имеет жестко закрепленные на его корпусе движители, не изменяющие ориентацию своих осей тяги относительно продольной оси ПА.
Известен также способ управления ПА, который имеет жестко закрепленные на его корпусе движители, не изменяющие ориентацию своих осей тяги относительно продольной оси ПА, обеспечивающие его перемещение по произвольным пространственным траекториям, которые управляются сигналами, формируемыми программным устройством [Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. - М.: Круглый год, 2001, с.171-179; 223-227].
Данный способ является наиболее близким к предлагаемому изобретению. Однако его нельзя использовать для обеспечения точного перемещения ПА по планируемым траекториям, если под воздействием захваченных грузов, подводного кабеля, которым он крепится к судну – носителю, или при наличии иных возмущающих факторов у этого ПА появляется неконтролируемый дифферент или крен, не учитываемый его системам управления (СУ).
Задачей изобретения является обеспечение точного перемещения ПА по предписанным пространственным траекториям даже в том случае, если он постоянно имеет и сохраняет заранее неизвестные ненулевые углы крена и дифферента.
Технический результат изобретения заключается в формировании с помощью имеющихся у ПА движителей такого результирующего вектора и момента тяги, которые обеспечивают его точное перемещение в пространстве по заданным траекториям даже с полученным непланируемым дифферентом и креном. При этом сигналы управления соответствующими движителями ПА формируются на основе информации о его текущей нештатной пространственной ориентации.
Поставленная задача решается тем, что способ управления подводным аппаратом, который имеет жестко закрепленные на его корпусе движители, не изменяющие ориентацию своих осей тяги относительно продольной оси аппарата, обеспечивающие его перемещение по произвольным пространственным траекториям, которые управляются сигналами, формируемыми программным устройством, отличается тем, что измеряют текущие значения углов крена и дифферента подводного аппарата, при этом вектор результирующей тяги его движителей, обеспечивающий реальные линейные перемещения по произвольным пространственным траекториям подводного аппарата, корпус которого сохраняет в процессе этих перемещений произвольные неуправляемые углы крена и дифферента, автоматически формируют с учетом текущих значений его углов крена и дифферента, при этом используют информацию программного устройства, определяющую пространственное перемещение подводного аппарата без учета текущих значений его углов крена и дифферента, причем сигналы управления конкретными движителями подводного аппарата формируют с использованием информации о векторе результирующей тяги. Кроме того, для измерения текущих значений углов крена и дифферента подводного аппарата используют блок гироскопов, которые устанавливают на борту подводного аппарата.
Сопоставительный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию «новизна».
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «измеряют текущие значения углов крена и дифферента подводного аппарата» позволяет получить информацию о реальном отклонении этого аппарата от исходного (предписанного ему) положения.
Признаки «…вектор результирующей тяги его движителей, обеспечивающий реальные линейные перемещения по произвольным пространственным траекториям подводного аппарата, корпус которого сохраняет в процессе этих перемещений произвольные неуправляемые углы крена и дифферента, автоматически формируют с учетом текущих значений его углов крена и дифферента, при этом используют информацию программного устройства, определяющую пространственное перемещение подводного аппарата без учета текущих значений его углов крена и дифферента, причем сигналы управления конкретными движителями подводного аппарата формируют с использованием информации о векторе результирующей тяги…» обеспечивают требуемое перемещение ПА в пространстве по предписанным траекториям.
Признаки дополнительного пункта формулы изобретения обеспечивают решение задачи определения текущих значений углов крена и дифферента подводного аппарата от его исходного положения под влиянием внешних воздействий.
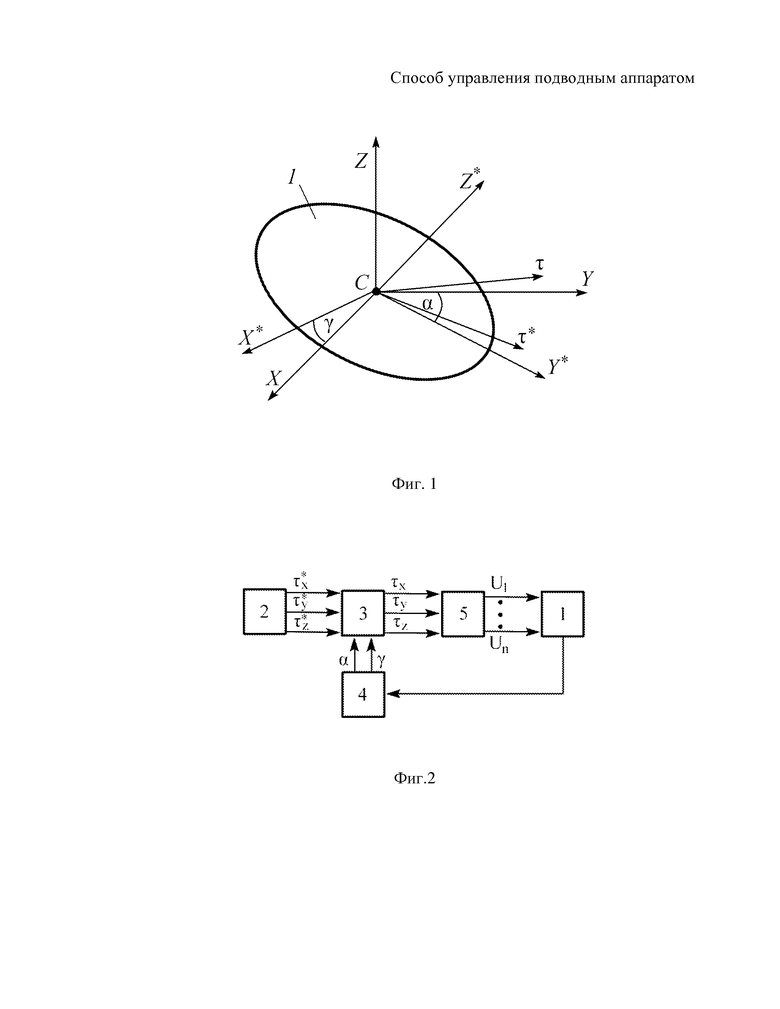
Заявленный способ осуществляется с помощью устройства, которое иллюстрируется чертежами, где на фиг.1 схематически показан ПА, имеющий не предусмотренные программой его движения углы крена и дифферента, а на фиг.2 – схема каналов управления движителями ПА.
На чертежах показаны 1 – ПА, оснащенный движителями и имеющий угловые смещения по крену и дифференту; 2 – программное устройство; 3 – блок коррекции результирующего вектора тяги, обеспечивающего перемещение ПА по заданной траектории с непредсказуемо появляющимися дифферентом и креном; 4 – блок гироскопов, измеряющий углы γ и α ПА (γ и α – соответственно, углы крена и дифферента); 5 – блок формирования сигналов управления движителями ПА; С – центр масс ПА; X, Y и Z – оси правой прямоугольной системы координат (СК) XYZ, начало которой совпадает с точкой С, а ось Z всегда направлена вертикально вверх; X*, Y* и Z* – оси правой прямоугольной СК X*Y*Z*, связанной с точкой С, причем ось Y* совпадает с продольной осью ПА, а ось Y является проекцией оси Y* на горизонтальную плоскость; 







В штатном режиме управления за счет своей остойчивости при перемещении по любым пространственным траекториям ПА 1 не имеет крен и дифферент, отличные от нуля. В этом случае формируемый с помощью программного устройства 2 вектор тяги
В результате возникает необходимость учета реальной нештатной пространственной ориентации ПА 1 с целью корректировки вектора
Заявленный способ реализуется следующим образом.
Программное устройство 2 задает вектор тяги
Указанная коррекция осуществляется в блоке 3 коррекции результирующего вектора тяги, обеспечивающем перевод вектора тяги
Очевидно, что реализация предложенного способа управления ПА 1 не вызывает принципиальных затруднений, поскольку в качестве программного устройства 2, блока 3 коррекции результирующего вектора тяги, блока 4 гироскопов и блока 5 формирования сигналов управления движителями ПА 1 используются известные типовые устройства, чьи технические и эксплуатационные характеристики соответствуют параметрам работы ПА 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации автономного необитаемого подводного аппарата в режиме зависания при выполнении установленным на нем многозвенным манипулятором контактных операций с подводными объектами | 2023 |
|
RU2814354C1 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОДВОДНОГО АППАРАТА В РЕЖИМЕ ЗАВИСАНИЯ | 2014 |
|
RU2547039C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ТЕЛЕКАМЕРЫ | 2014 |
|
RU2556441C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2475799C2 |
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ управления многозвенным манипулятором необитаемого подводного аппарата для выполнения манипуляционных операций с подводными объектами | 2022 |
|
RU2781926C1 |
Изобретение относится к способу управления подводным аппаратом. Для управления подводным аппаратом измеряют текущие значения углов крена и дифферента подводного аппарата, с помощью программного устройства формируют сигналы управления движителями на основании вектора результирующей их тяги, который автоматически формируют с учетом текущих углов крена и дифферента, измеренных с помощью блока гироскопов на борту подводного аппарата, и информации программного устройства, определяющего пространственное перемещение подводного аппарата без учета текущих значений его углов крена и дифферента. Обеспечивается точное перемещение подводного аппарата по заданной траектории с учетом возмущений. 1 з.п. ф-лы, 2 ил.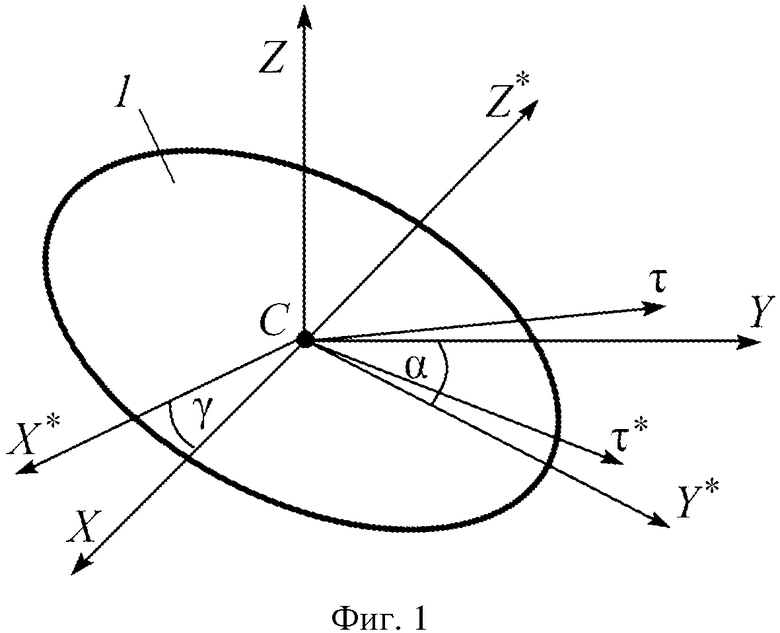
1. Способ управления подводным аппаратом, который имеет жестко закрепленные на его корпусе движители, не изменяющие ориентацию своих осей тяги относительно продольной оси подводного аппарата, при котором измеряют текущие значения углов крена и дифферента подводного аппарата, с помощью программного устройства формируют сигналы управления движителями на основании вектора результирующей их тяги, который автоматически формируют с учетом текущих углов крена и дифферента и информации программного устройства, определяющего пространственное перемещение подводного аппарата без учета текущих значений его углов крена и дифферента.
2. Способ по п. 1, отличающийся тем, что для измерения текущих значений углов крена и дифферента подводного аппарата используют блок гироскопов, которые устанавливают на борту подводного аппарата.
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2475799C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОДВОДНОГО АППАРАТА В РЕЖИМЕ ЗАВИСАНИЯ | 2014 |
|
RU2547039C1 |
| WO 2013178779 A1, 05.12.2013 | |||
| WO 2009009074 A1, 15.01.2009 | |||
| WO 2000034837 A1, 15.06.2000. | |||

