Изобретение относится к области автоматического управления динамическими объектами.
Известен способ стабилизации подводного аппарата (ПА) по разомкнутому контуру в режиме его зависания вблизи или над объектом работ в процессе работы установленного на нем манипулятора, включающий подачу на входы двигателей всех степеней подвижности манипулятора сигналов, определяемых желаемой программной траекторией движения его рабочего инструмента в пространстве и формируемых на основе аналитических соотношений, полученных после решения обратной задачи кинематики для конкретной кинематической схемы манипулятора, а на входы соответствующих движителей ПА - сигналов, компенсирующих силовые и моментные воздействия на этот аппарат со стороны манипулятора, произвольно перемещающегося в вязкой среде, причем сигналы управления движителями ПА формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на ПА, учитывающих все эффекты взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости, отличающийся тем, что на борту ПА дополнительно устанавливают гироскопические датчики и навигационную систему, определяющие линейное и угловое смещения этого аппарата от его исходного положения, а на два движителя каждой из трех пар движителей ПА, обеспечивающих ему шесть необходимых степеней подвижности, одновременно подаются сигналы управления, пропорциональные линейному смещению ПА параллельно продольным осям движителей этой пары, а также угловому смещению ПА относительно оси, перпендикулярной плоскости, образуемой продольными осями этой пары движителей, которые обеспечивают формирование движителями ПА упоров, стабилизирующих ПА в заданной точке пространства. [Филаретов В.Ф., Коноплин А.Ю. Способ стабилизации подводного аппарата в режиме зависания // RU 2547039 C1, 10.04.2015].
Недостатком указанного способа является то, что он не позволяет обеспечить стабилизацию ПА при выполнении контактных манипуляционных операций, поскольку не идентифицирует и не компенсирует силовые и моментные воздействия, вызванные контактом рабочего инструмента манипулятора с поверхностью объекта работ. Также этот способ не позволяет стабилизировать в режиме зависания ПА, схемы компоновки движителей которых отличаются от приведенной в вышеуказанном способе.
Известен способ позиционно-силового управления автономным необитаемым подводным аппаратом (АНПА) с многостепенным манипулятором в режиме его зависания и предварительной стабилизации перед началом выполнения силовых операций с объектом работ, которые осуществляют в дальнейшем, учитывая линейные смещения АНПА в пространстве, определяемые системой технического зрения, и его угловые смещения, определяемые бортовыми гироскопическими датчиками, заключающийся в задании переменных желаемых величин и направлений силовых воздействий, оказываемых рабочим инструментом манипулятора с тремя переносными и тремя ориентирующими степенями подвижности, основание которого закреплено под центром величины АНПА, на объект работ в каждой точке траектории движения его рабочего инструмента, которую формируют с помощью 3D-модели этого объекта работ, при этом на входы соответствующих движителей АНПА подают сигналы управления, уменьшающие его отклонения от исходного положения при перемещениях манипулятора в вязкой среде, отличающийся тем, что внешний корпус АНПА выполняют симметричным относительно его главной вертикальной оси в виде эллипсоида, сплющенного вдоль этой оси, причем проекция этого корпуса на плоскость, проходящую через две другие главные оси симметрии, имеет форму круга, а шесть движителей АНПА закрепляют попарно на его главных осях симметрии на одинаковом расстоянии относительно его центра величины так, чтобы оси их тяг попарно всегда были перпендикулярны осям тяг остальных пар движителей и обеспечивали АНПА шесть степеней свободы, до начала любых рабочих операций во время тестовых движений манипулятора с неподвижно зафиксированным в пространстве корпусом АНПА с помощью фильтра Калмана осуществляют идентификацию масс и моментов инерции окружающей жидкости, присоединяемых к двум главным звеньям переносных степеней подвижности манипулятора, после подхода АНПА и его стабилизации вблизи объекта работ, выявив с помощью системы технического зрения и трех маркеров текущие пространственные расположения АНПА и начальной точки сформированной траектории, переводят рабочий инструмент манипулятора из исходного положения в начальную точку траектории до контакта с объектом, затем формируют желаемые значения входных сигналов на соответствующие движители АНПА и приводы манипулятора, что обеспечивает плавное нарастание от нуля и до конечного значения программного силового и моментного воздействий со стороны рабочего инструмента на объект работ в начале траектории, при этом сохраняют неизменной исходную текущую конфигурацию манипулятора, одновременно обеспечивая более точную стабилизацию положения и ориентации АНПА в абсолютной системе координат за счет компенсации его движителями плавно нарастающих силовых и моментных воздействий со стороны манипулятора, реально возникающие неточности указанной программной компенсации ликвидируют с помощью типовой системы стабилизации, использующей информацию, получаемую от системы технического зрения, и отрицательные обратные связи по всем степеням свободы АНПА, применяя эту систему, создают дополнительные сигналы управления соответствующими движителями, которые удерживают АНПА в его исходной точке пространства с исходной ориентацией, после формирования исходного вектора силового воздействия со стороны рабочего инструмента манипулятора на объект работ формируют новую величину и направление этого вектора, который уже учитывает дополнительные составляющие сухого трения и сопротивления движению рабочего инструмента в начале построенной траектории, указанный вектор также формируют с помощью движителей АНПА путем подачи плавно и синхронно изменяющихся входных сигналов на соответствующие движители и приводы манипулятора, после построения упомянутого вектора в зависимости от выполняемой программы задают скорость перемещения рабочего инструмента манипулятора по ранее сформированной траектории и начинают это перемещение, подавая на входы позиционно-силовых систем управления приводами манипулятора соответствующие сигналы, в состав которых входят программные и фактические значения обобщенных координат манипулятора, их скоростей и ускорений, а также программные и фактические значения внешних моментов, обусловленные только силовым взаимодействием рабочего инструмента манипулятора с поверхностью объекта работ, причем фактические значения указанных внешних моментов определяют с помощью диагностических наблюдателей суммарных значений обобщенных внешних моментов, из которых вычитают составляющие взаимовлияний с реальными значениями масс и моментов инерции звеньев манипулятора, моменты от действия гидростатических сил, моменты вязкого трения, а также моменты, обусловленные наличием уже идентифицированных присоединенных масс и моментов инерции жидкости, во время движения манипулятора по сформированной траектории с помощью рекуррентного алгоритма определяют силовые и моментные воздействия, которые движущийся в водной среде манипулятор оказывает на АНПА в точке его крепления к последнему, все указанные воздействия на АНПА синхронно и плавно компенсируют его движителями, при этом ввиду неточностей определения некоторых параметров силовых воздействий дополнительно используют упомянутую систему стабилизации положения и ориентации АНПА в абсолютной системе координат, с помощью которой формируют дополнительные сигналы управления его движителями. [Зуев А.В., Филаретов В.Ф., Тимошенко А.А. Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором // RU 2799176, 04.07.2023].
Недостатком указанного способа является то, что его работоспособность, заключающаяся в обеспечении движения рабочего инструмента манипулятора по желаемой траектории с оказанием заданного силового воздействия на поверхность объекта работ, зависит от точности стабилизации АНПА в режиме зависания вблизи этого объекта, также от точности отработки движителями АНПА желаемых значений входных сигналов, формируемых с учетом нарастающих силовых и моментных воздействий со стороны манипулятора. Однако в реальных условиях работы при наличии течений требуемая точность стабилизации АНПА в режиме зависания в заданной точке пространства с заданной ориентацией при работающем манипуляторе практически недостижима. Это обусловлено тем, что АНПА являются очень инерционными динамическими объектами, а их системы технического зрения определяют информацию о линейных смещениях АНПА с неизбежными временными задержками и ограниченной точностью. При этом даже с использованием эффективных систем управления движители АНПА отрабатывают поступающие на их входы сигналы управления с ограниченной точностью, что обусловлено нелинейностью статических характеристик движителей, постоянными времени этих движителей, а также сложными нелинейными зависимостями создаваемой движителем тяги от частоты вращения винта, направления и скорости набегающего потока жидкости. В результате даже незначительные неизбежные смещения АНПА относительно исходного положения в пространстве приведут либо к потере контакта рабочего инструмента манипулятора с поверхностью объекта работ, либо к соударению рабочего инструмента с объектом и сходу этого инструмента с заданной траектории. Кроме того, форма корпуса АНПА в виде эллипсоида, сплющенного относительно вертикальной оси аппарата, в совокупности с расположением манипулятора под центром величины АНПА ограничивает рабочую зону манипулятора только пространством под АНПА, исключая возможность выполнения манипуляционных операций сбоку от аппарата с расположенными вертикально объектами и подводными сооружениями. При этом вышеуказанный способ не позволяет выполнять контактные операции с помощью АНПА, схемы компоновки движителей которых отличаются от приведенной в вышеуказанном способе.
Известен также способ управления подводным манипулятором в режиме зависания ПА, при реализации которого на борту ПА устанавливают гироскопические датчики и навигационную систему, определяющие линейное и угловое смещения этого аппарата от его исходного положения при работающем манипуляторе, а на следящие приводы всех степеней подвижности манипулятора подают дополнительные сигналы управления, пропорциональные смещению этого ПА от его исходного положения, которые обеспечивают дополнительное перемещение рабочего инструмента манипулятора в пространстве и тем самым продолжение его точного движения по заранее заданной желаемой программной траектории независимо от произвольных смещений ПА, дополнительно вычисляют внешние моменты, действующие на выходные валы приводов во всех степенях подвижности манипулятора в результате силового контакта рабочего инструмента этого манипулятора с поверхностью объекта работ, посредством вычитания из величины результирующего внешнего момента, действующего на выходной вал привода каждой степени подвижности манипулятора и измеряемого датчиком или наблюдателем момента нагрузки соответствующего привода, величины момента, обусловленного эффектами взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатическими и гидродинамическими силами сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости, и вычисляемого с помощью аналитических выражений решения обратной задачи динамики для упомянутого подводного манипулятора, затем для конкретной кинематической схемы манипулятора на основе вычисленных величин внешних моментов, действующих на выходные валы приводов во всех степенях подвижности манипулятора в результате силового контакта рабочего инструмента этого манипулятора с поверхностью объекта работ, рассчитывают величину и направление вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, после чего на приводы всех степеней подвижности манипулятора подают сигналы управления, обеспечивающие перемещение рабочего инструмента упомянутого манипулятора в направлении желаемого вектора силы для достижения желаемой величины силового воздействия рабочего инструмента на поверхность объекта работ, в то же время на входы соответствующих движителей ПА подают сигналы, компенсирующие силовые и моментные воздействия на этот аппарат со стороны манипулятора, перемещающегося в вязкой среде и оказывающего силовое воздействие на объект работ, причем сигналы управления движителями ПА формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на ПА, учитывающих вычисляемые величину и направление вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, эффекты взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости [Коноплин А.Ю., Красавин Н.А., Юрманов А.П., Пятавин П.А. Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами // RU 2789510, 06.02.2023].
Данный способ является наиболее близким к предлагаемому изобретению. Однако он не позволяет выполнять контактные операции многозвенными манипуляторами, установленными на АНПА, схемы компоновки движителей которых не обеспечивают управление перемещениями этих аппаратов по углу крена.
Задачей изобретения является устранение указанного выше недостатка и обеспечение требуемой точности стабилизации АНПА в режиме зависания при выполнении многозвенным манипулятором контактных операций с подводными объектами.
Технический результат изобретения заключается в автоматическом формировании сигналов управления, подаваемых на входы соответствующих движителей АНПА, включая дополнительный движитель, устанавливаемый выше центра водоизмещения АНПА на поворотной платформе, изменяющей направление вектора тяги дополнительного движителя. Также автоматически формируются сигналы управления двигателем вышеуказанной поворотной платформы, задающей пространственную ориентацию вектора тяги дополнительного движителя. Вышеуказанные сигналы управления формируются на основе вычисляемых в реальном масштабе времени величинах и направлениях векторов силы и момента, действующих на АНПА со стороны многозвенного манипулятора, выполняющего контактную силовую операцию с объектом работ. С помощью тяг, создаваемых движителями АНПА, компенсируются силовые и моментные воздействия на АНПА со стороны работающего манипулятора, за счет чего обеспечивается стабилизация АНПА в режиме зависания.
Поставленная задача решается тем, что при реализации способа стабилизации АНПА в режиме зависания при выполнении установленным на нем многозвенным манипулятором контактных операций с подводными объектами, определяют линейное и угловое смещения АНПА от его исходного положения при работающем манипуляторе посредством установленных на борту АНПА гироскопических датчиков и навигационной системы, а также подают на следящие приводы всех степеней подвижности манипулятора дополнительные сигналы управления, пропорциональные смещению этого АНПА от его исходного положения, которые обеспечивают дополнительное перемещение рабочего инструмента манипулятора в пространстве и тем самым продолжение его точного движения по заранее заданной желаемой программной траектории независимо от произвольных смещений АНПА, при этом на входы соответствующих маршевых и подруливающих движителей АНПА подают сигналы, компенсирующие составляющую вектора момента, направленную вдоль вертикальной оси АНПА, и вектор силы, обусловленные воздействием на АНПА со стороны манипулятора, перемещающегося в вязкой среде и оказывающего силовое воздействие на объект работ, причем сигналы управления движителями АНПА формируют в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми манипулятор действует на АНПА и учитывающих вычисляемые величину и направление вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, эффекты взаимовлияния между всеми степенями подвижности манипулятора, гидростатические и гидродинамические силы сопротивления его движению, включая силы вязкого трения и силы, вызванные присоединенными массами окружающей жидкости, дополнительно снабжают АНПА дополнительным движителем, установленным на поворотной платформе на борту АНПА выше его центра водоизмещения, причем ось вращения поворотной платформы совпадает с вертикальной осью АНПА, при этом на входы двигателя поворотной платформы и дополнительного движителя подают сигналы, задающие, соответственно, пространственную ориентацию и величину вектора тяги дополнительного движителя, компенсирующего составляющую вектора моментного воздействия на АНПА со стороны работающего манипулятора, лежащую в плоскости, образованной продольной и горизонтальной поперечной осями АНПА, и приводящую к возникновению нежелательных углов крена и дифферента АНПА, причем на входы соответствующих маршевых и подруливающих движителей АНПА в реальном масштабе времени подают дополнительные сигналы, компенсирующие вектор силового воздействия на АНПА со стороны дополнительного движителя.
Сопоставительный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию «новизна».
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «снабжают АНПА дополнительным движителем, установленным на поворотной платформе на борту АНПА выше его центра водоизмещения, причем ось вращения поворотной платформы совпадает с вертикальной осью АНПА» обеспечивает возможность формирования управляющих воздействий на АНПА для его перемещения по углам крена и дифферента, а также для компенсации нежелательных внешних динамических воздействий на аппарат, приводящих к его смещениям по углам крена и дифферента.
Признак «на входы двигателя поворотной платформы и дополнительного движителя подают сигналы, задающие, соответственно, пространственную ориентацию и величину вектора тяги дополнительного движителя, компенсирующего составляющую вектора моментного воздействия на АНПА со стороны работающего манипулятора, лежащую в плоскости, образованной продольной и горизонтальной поперечной осями АНПА, и приводящую к возникновению нежелательных углов крена и дифферента АНПА» позволяет компенсировать составляющую вектора моментного воздействия на АНПА со стороны работающего манипулятора, лежащую в плоскости, образованной продольной и горизонтальной поперечной осями АНПА, и приводящую к возникновению нежелательных углов крена и дифферента этого аппарата. В результате чего обеспечивается стабилизация АНПА по углам крена и дифферента.
Признак «на входы соответствующих маршевых и подруливающих движителей АНПА в реальном масштабе времени подают дополнительные сигналы, компенсирующие вектор силового воздействия на АНПА со стороны дополнительного движителя» позволяет маршевым и подруливающим движителям АНПА в реальном масштабе времени формировать дополнительные тяги, компенсирующие нежелательные силовые воздействия со стороны дополнительного движителя.
Заявленное изобретение иллюстрируется чертежом, где изображен оснащенный дополнительным движителем АНПА, выполняющий контактную операцию с объектом работ. На фиг. 1 приняты следующие обозначения: 1 - АНПА; 2 - многозвенный манипулятор; 3 - объект работ; 4 - маршевые движители; 5 - подруливающие движители; 6 - дополнительный движитель; CXYZ - система координат (СК), жестко связанная с АНПА, ось CX которой направлена вдоль продольной оси аппарата, ось CZ направлена вертикально вниз, а ось CY дополняет их до правой тройки; С - центр величины АНПА;  - тяги, формируемые маршевыми движителями;
- тяги, формируемые маршевыми движителями;  - тяги, формируемые подруливающими движителями;
- тяги, формируемые подруливающими движителями;  - угол, образуемый продольными осями маршевых движителей с продольной осью CX АНПА;
- угол, образуемый продольными осями маршевых движителей с продольной осью CX АНПА;  ,
,  - векторы силового и моментного воздействий на центр величины АНПА со стороны работающего манипулятора соответственно;
- векторы силового и моментного воздействий на центр величины АНПА со стороны работающего манипулятора соответственно;  - тяга, формируемая дополнительным движителем;
- тяга, формируемая дополнительным движителем;  - составляющие результирующих векторов сил и моментов, с которыми движительно-рулевой комплекс (ДРК) воздействует на центр величины АНПА;
- составляющие результирующих векторов сил и моментов, с которыми движительно-рулевой комплекс (ДРК) воздействует на центр величины АНПА;  - угол поворота платформы, на которой располагается дополнительный движитель.
- угол поворота платформы, на которой располагается дополнительный движитель.
Заявленный способ реализуется следующим образом.
При нахождении АНПА в режиме стабилизируемого зависания в процессе работы манипулятора с помощью способа [Коноплин А.Ю., Красавин Н.А., Юрманов А.П., Пятавин П.А. Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами // RU 2789510, 06.02.2023; Коноплин А.Ю., Красавин Н.А., Юрманов А.П., Пятавин П.А., Кацурин А.А. Система позиционно-силового управления подводными аппаратами с многозвенными манипуляторами для выполнения контактных манипуляционных операций // Подводные исследования и робототехника. 2022. № 4(42). С. 40-52] определяются линейные и угловые смещения АНПА от его исходного положения при работающем манипуляторе посредством установленных на борту АНПА гироскопических датчиков и навигационной системы, а также на следящие приводы всех степеней подвижности манипулятора подаются дополнительные сигналы управления, пропорциональные смещению этого АНПА от его исходного положения, которые обеспечивают дополнительное перемещение рабочего инструмента манипулятора в пространстве и тем самым продолжение его точного движения по заранее заданной желаемой программной траектории независимо от произвольных смещений АНПА.
При этом с учетом вычисляемых величины и направления вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, эффектов взаимовлияния между всеми степенями подвижности манипулятора, гидростатических и гидродинамических сил сопротивления его движению, включая силы вязкого трения и силы, вызванные присоединенными массами окружающей жидкости, вычисляются составляющие векторов силы  и момента
и момента  , с которыми манипулятор воздействует на аппарат.
, с которыми манипулятор воздействует на аппарат.
Исходя из принятой компоновочной схемы расширенного ДРК АНПА (фиг. 1), зависимость элементов результирующих векторов силы и момента от тяг, создаваемых движителями, описывается с помощью выражений:
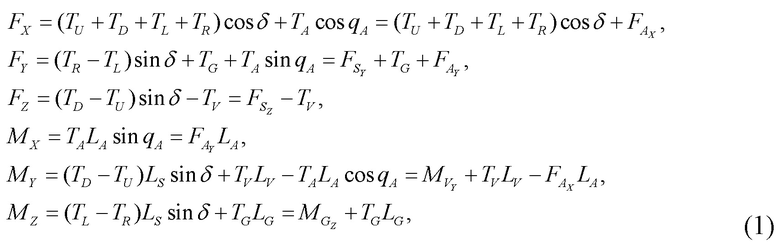
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - проекции создаваемых движителями сил и моментов на соответствующие оси СК CXYZ,
- проекции создаваемых движителями сил и моментов на соответствующие оси СК CXYZ,  - геометрические параметры компоновки движителей АНПА.
- геометрические параметры компоновки движителей АНПА.
Описанный ДРК является избыточным, поскольку в нем исполнительных механизмов больше, чем количество доступных для управления степеней свободы. Поэтому для решения задачи распределения управляющих воздействий между элементами ДРК применяется подход [Киселев Л.В, Костенко В.В., Медведев А.В. К оценке динамических характеристик АНПА ММТ-3500 на основе модельных и экспериментальных данных // Подводные исследования и робототехника. 2022. № 3(41). С. 33-44.], когда управляющее воздействие, направленное вдоль оси CX связанной с АНПА СК, а также управления по курсу и дифференту формируются группой маршевых движителей, расположенных в кормовой части АНПА, причем сигнал управления по дифференту формируется с учетом момента, создаваемого дополнительным движителем. Воздействия, направленные вдоль осей CY и CZ, формируются горизонтальным и вертикальным подруливающими движителями соответственно. При этом нежелательные моменты, создаваемые подруливающими движителями, компенсируются тягами маршевых движителей. С учетом вышеизложенного для компенсации силовых и моментных воздействий на АНПА со стороны работающего манипулятора исходный ДРК должен создавать следующие элементы желаемых векторов результирующих тяги и момента:

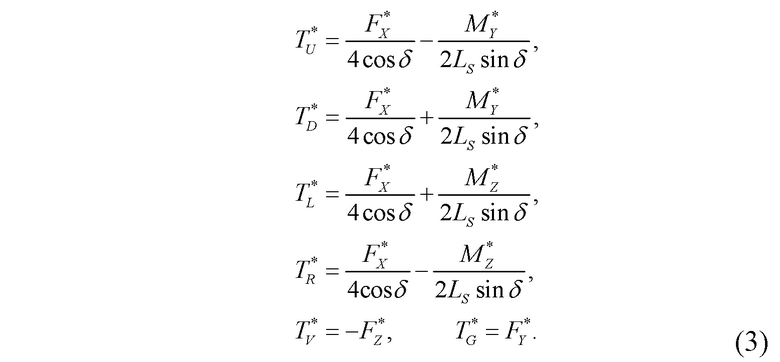
В результате с учетом (1) и (2) желаемые значения тяг движителей исходного ДРК будут иметь вид:
При этом системы управления движителями АНПА [Киселев Л. В, Костенко В.В., Медведев А.В. К оценке динамических характеристик АНПА ММТ-3500 на основе модельных и экспериментальных данных // Подводные исследования и робототехника. 2022. № 3(41). С. 33-44.] обеспечивают близость реальных и желаемых значений создаваемых тяг.
Дополнительный движитель на поворотной платформе позволяет управлять угловыми перемещениями АНПА по крену и дифференту в случае, если исходный ДРК не может скомпенсировать динамические воздействия со стороны манипулятора на аппарат. Поскольку эти воздействия носят произвольный характер, необходимо в реальном масштабе времени задавать такие значения  и
и  , которые обеспечат стабилизацию АНПА как по углу крена, так и по углу дифферента. В результате желаемые значения тяги
, которые обеспечат стабилизацию АНПА как по углу крена, так и по углу дифферента. В результате желаемые значения тяги  и угла
и угла  поворота дополнительного движителя рассчитываются с помощью выражений:
поворота дополнительного движителя рассчитываются с помощью выражений:

где  ,
,  - желаемое значение момента вокруг оси CY, который должен создавать дополнительный движитель. При этом могут вводиться специальные условия, позволяющие однозначно определять величину угла и инвертировать тягу для того, чтобы избегать скачкообразного изменения .
- желаемое значение момента вокруг оси CY, который должен создавать дополнительный движитель. При этом могут вводиться специальные условия, позволяющие однозначно определять величину угла и инвертировать тягу для того, чтобы избегать скачкообразного изменения .
В случае, когда у дополнительного движителя есть достаточный запас по управлению, чтобы скомпенсировать моментные воздействия как вокруг оси CX, так и вокруг оси CY, величина в выражениях (4), (5) принимает вид:  . Если же возможностей дополнительного движителя недостаточно для стабилизации АНПА одновременно по крену и дифференту, то целесообразно ограничивать сигнал управления этим движителем по углу дифферента, чтобы гарантированно обеспечить стабилизацию АНПА по углу крена. При этом часть сигнала управления, сформированного для стабилизации аппарата по углу дифферента (2), которая не может быть отработана дополнительным движителем, должна подаваться на маршевые движители. Таким образом, если значение желаемой тяги дополнительного движителя, полученное в соответствии с выражением (4), превышает предельное значение тяги
. Если же возможностей дополнительного движителя недостаточно для стабилизации АНПА одновременно по крену и дифференту, то целесообразно ограничивать сигнал управления этим движителем по углу дифферента, чтобы гарантированно обеспечить стабилизацию АНПА по углу крена. При этом часть сигнала управления, сформированного для стабилизации аппарата по углу дифферента (2), которая не может быть отработана дополнительным движителем, должна подаваться на маршевые движители. Таким образом, если значение желаемой тяги дополнительного движителя, полученное в соответствии с выражением (4), превышает предельное значение тяги  этого движителя:
этого движителя:

то вычисляется значение необходимой тяги  , которую должен сформировать дополнительный движитель для стабилизации АНПА по углу крена:
, которую должен сформировать дополнительный движитель для стабилизации АНПА по углу крена:

Далее, учитывая запас дополнительного движителя по мощности:

формируется сигнал для управления аппаратом по углу дифферента с помощью дополнительного движителя, который в дальнейшем учитывается в выражениях (4) и (5):

где  ;
;  - тяга, которую может сформировать дополнительный движитель для стабилизации угла дифферента после того, как обеспечивается стабилизация по крену.
- тяга, которую может сформировать дополнительный движитель для стабилизации угла дифферента после того, как обеспечивается стабилизация по крену.
В результате за счет сформированных тяг ДРК, рассчитываемых с помощью выражений (3)-(9), удается обеспечить точную стабилизацию АНПА, находящегося в режиме стабилизируемого зависания над или вблизи объекта работ, при произвольных внешних воздействиях со стороны манипулятора, выполняющего силовую контактную операцию с объектом работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| СПОСОБ ПОЗИЦИОННО-СИЛОВОГО УПРАВЛЕНИЯ АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ С МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2023 |
|
RU2827123C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2475799C2 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ УНИЧТОЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО СТАЦИОНАРНОГО ОБЪЕКТА | 2017 |
|
RU2670192C9 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОДВОДНОГО АППАРАТА В РЕЖИМЕ ЗАВИСАНИЯ | 2014 |
|
RU2547039C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ | 2017 |
|
RU2664971C1 |
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |

Изобретение относится к области робототехники и может быть использовано для стабилизации автономного необитаемого подводного аппарата (АНПА) в процессе выполнения установленным на нем многозвенным манипулятором контактных операций с подводными объектами. Способ включает автоматическое формирование сигналов управления, которые подаются на входы соответствующих движителей АНПА, в том числе дополнительный движитель, который устанавливается выше центра водоизмещения АНПА на поворотной платформе, изменяющей направление вектора тяги этого движителя. Также автоматически формируются сигналы управления двигателем поворотной платформы, задающей пространственную ориентацию вектора тяги дополнительного движителя. Указанные сигналы управления формируются на основе вычисляемых в реальном масштабе времени величин и направлений векторов силы и момента, действующих на АНПА со стороны многозвенного манипулятора, выполняющего контактную силовую операцию с объектом работ. С помощью тяг, создаваемых движителями АНПА, компенсируются силовые и моментные воздействия на АНПА со стороны работающего манипулятора и обеспечивается стабилизация АНПА в режиме зависания. Использование изобретения позволяет повысить точность стабилизации АНПА в режиме зависания при выполнении силовых манипуляционных работ. 1 ил.
Способ стабилизации автономного необитаемого подводного аппарата (АНПА) в режиме зависания при выполнении установленным на нем многозвенным манипулятором контактных операций с подводными объектами, включающий определение линейного и углового смещений АНПА от его исходного положения при работающем манипуляторе посредством установленных на борту АНПА гироскопических датчиков и навигационной системы, а также подачу на следящие приводы всех степеней подвижности манипулятора дополнительных сигналов управления, пропорциональных смещению этого АНПА от его исходного положения, которые обеспечивают дополнительное перемещение рабочего инструмента манипулятора в пространстве для продолжения его движения по заранее заданной программной траектории независимо от произвольных смещений АНПА, при этом на входы соответствующих маршевых и подруливающих движителей АНПА подают сигналы, компенсирующие составляющую вектора момента, направленную вдоль вертикальной оси АНПА, и вектор силы, обусловленные воздействием на АНПА со стороны манипулятора, перемещающегося в вязкой среде и оказывающего силовое воздействие на объект работ, причем сигналы управления движителями АНПА формируют в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми манипулятор действует на АНПА, и учитывающих вычисляемые величину и направление вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, эффекты взаимовлияния между всеми степенями подвижности манипулятора, гидростатические и гидродинамические силы сопротивления его движению, включая силы вязкого трения и силы, вызванные присоединенными массами окружающей жидкости, отличающийся тем, что АНПА снабжают дополнительным движителем, установленным на поворотной платформе на борту АНПА выше его центра водоизмещения, причем ось вращения поворотной платформы совпадает с вертикальной осью АНПА, при этом на входы двигателя поворотной платформы и дополнительного движителя подают сигналы, задающие соответственно пространственную ориентацию и величину вектора тяги дополнительного движителя, компенсирующего составляющую вектора моментного воздействия на АНПА со стороны работающего манипулятора, лежащую в плоскости, образованной продольной и горизонтальной поперечной осями АНПА, и приводящую к возникновению нежелательных углов крена и дифферента АНПА, причем на входы соответствующих маршевых и подруливающих движителей АНПА в реальном масштабе времени подают дополнительные сигналы, компенсирующие вектор силового воздействия на АНПА со стороны дополнительного движителя.
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОДВОДНОГО АППАРАТА В РЕЖИМЕ ЗАВИСАНИЯ | 2014 |
|
RU2547039C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2475799C2 |
| US 2008275594 A1, 06.11.2008 | |||
| WO 2011059197 A2, 19.05.2011 | |||
| CN 102029611 A, 27.04.2011. | |||

