Изобретение относится к области навигации, а более конкретно к способам навигации автономных необитаемых подводных аппаратов, именно к области технических средств спутниковой, гидроакустической и инерциальной навигации и стабилизации для морских подводных автономных необитаемых аппаратов.
Разработка высокоточных систем для автоматического приведения и стыковки автономных необитаемых подводных аппаратов (АНПА) с причальными сооружениями, спуско-подъемными устройствами и другими объектами связана с использованием гидроакустических навигационных и приводных маяков, а также спутниковой и инерциальной навигации.
В известных системах навигации подводного автономного необитаемого аппарата задачи приведения и стыковки под водой решаются при наличии акустического (Allen В., Austin Т., Forrester N. et al. Autonomous Docking Demonstrations with Enhanced REMUS Technology // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1. Utley С, Lee H. Signal Processing Algorithms for High-Precision Three-Dimensional Navigation and Guidance of Unmanned Undersea Vehicles (UUV) // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1. Grant M. de Goede, Donald Norris. Recovering Unmanned Undersea Vehicles With a Homing and Docking Sonar // Proc. of OCEANS 2005 MTS/IEEE. Washington, D.C., USA, 18-23 September 2005. USA CD-ROM. ISBN 0-933957-33-5. [1-3]) или визуального (оптического) контакта в ближней зоне приведения (Inzartsev A.V., Matvienko Yu.V., Pavin A.M., Vaulin Yu.V., Scherbatyuk A.Ph. Algorithms of Autonomous Docking System Operation for Long Term AUV // Proc. of 14th Int. Symp. on Unmanned Untethered Submersible Technology (UUST05), Durham, New Hampshire, USA, August 21-24, 2005. Ваулин Ю.В., Инзарцев А.В., Матвиенко А.В., Павин A.M., Щербатюк А.Ф. Исследование работы элементов системы приведения автономного необитаемого подводного аппарата // Матер, междунар. науч.-техн. конф. «Технические проблемы освоения мирового океана». Владивосток, 14-17 сентября, 2005. Владивосток: Дальнаука, 2005. С.40-45 [4, 5]). При работе АНПА с большой автономностью и дальностью хода необходимо обеспечивать возвращение АНПА к обеспечивающему судну после выполнения длительной миссии. В этих условиях важно организовать приведение АНПА в ближнюю зону с учетом того, что накапливающиеся ошибки бортовой автономной навигации могут составлять сотни и тысячи метров.
Один из вариантов решения данной задачи связан с приведением аппарата на гидроакустический маяк, выполненный в виде буксируемой антенны или буксируемого антенного модуля (БАМ), входящего в состав судовой гидроакустической навигационной системы (ГАНС) (Киселев Л.В., Инзарцев А.В., Матвиенко Ю.В., Ваулин Ю.В. Навигация и управление в подводном пространстве // Мехатроника, автоматизация, управление. 2004. №11. С.35-42[6]). Данный подход не требует установки на аппарат дополнительного оборудования, а сводится к модификации программного обеспечения системы управления с использованием имеющихся на борту данных от приемников ГАНС. Однако использование обеспечивающего судна с буксируемым антенным модулем для выполнения посредством измерительной аппаратуры, установленной на подводном аппарате исследовательских и изыскательских работ, практически исключает использование подводных аппаратов при наличии сплоченного или дрейфующего льда, т.е. в арктических районах.
Известен также способ навигации подводного аппарата (A.M.Павин. Автоматическое приведение автономного подводного робота к гидроакустическому маяку // Подводные исследования и роботехника. 2008, №5(1), с.32-38. [7]), который реализуется следующим образом. На подводный аппарат устанавливают средства навигации, которые включают бортовую автономную навигационную систему, обеспечивающую определение координат по принципу счисления пути; гидроакустические и спутниковые системы навигации, позволяющие определять локальные или абсолютные координаты автономного необитаемого подводного аппарата (АНПА) и обеспечивающего судна.
Система счисления пути, в работе которой используется информация навигационно-пилотажных датчиков-измерителей глубины, составляющих поступательной и угловой скоростей, углов курса, крена и дифферента, дает накапливающуюся ошибку порядка нескольких десятков метров за час работы в зависимости от типа используемого измерителя скорости (доплеровского или относительного лага).
Гидроакустическая навигационная система с длинной или ультракороткой базой позволяет определять дальномерные и угловые параметры, которые используются для вычисления локальных или географических координат всех пространственно распределенных объектов навигации. Дальность действия системы ограничена энергетическими и гидрологическими условиями и может составлять 6…15 км в зависимости от района работ и типа используемой ГАНС. Применение маяка-ответчика или маяка-излучателя, погружаемого на кабеле с борта судна (с синхронизированными на АНПА и маяке часами) дает информацию только о дистанции между объектами. Совместное использование системы счисления пути и периодически измеряемых дистанций до гидроакустического маяка позволяет организовать надежное приведение подводного аппарата в малую окрестность маяка.
При использовании для приведения маяка-излучателя дистанция Lt от маяка до аппарата определяется как произведение времени dt2 распространения сигнала по трассе и скорости звука Vs. В случае применения маяка-ответчика известно только общее время распространения сигнала (dt12=dt1+dt2) от АНПА до маяка dt и обратно к АНПА dt2 Поэтому при расчете дистанции до маяка-ответчика берется половина временной задержки dt1,2. Координаты АНПА по счислению пути в случае с маяком-излучателем соответствуют местоположению АНПА в момент приема сигнала от маяка s=[Xt2,Yt2,Zt2], a в случае с маяком-ответчиком - среднему положению аппарата S=([Xt2,Yt2,Zt2]+[Xa,Yt1,Zt1]т)/2 между посылкой t1 и приемом t2 акустического сигнала. Так как глубины аппарата и маяка известны, то требуется определить только местоположение источника сигнала в горизонтальной проекции на эту плоскость вектора между положением АНПА и положением маяка:

где Rt - расстояние до маяка в плоскости (X,Y) в момент времени t; Lt - расстояние до маяка в трехмерном пространстве (X,Y,Z) в момент времени t; Zt - глубина АНПА в момент времени t; Zмаяк - глубина постановки маяка.
Программный модуль для приведения на маяк входит в состав библиотек координирующего уровня системы управления (СУ) АНПА и активизируется при приеме одной из команд телеуправления или по окончанию миссии. Таким образом, выход на маяк может быть осуществлен из произвольной точки во время выполнения миссии. Процедура приведения АНПА к гидроакустическому маяку включает этапы выполнения начального набора данных, автоматическое приведение АНПА в окрестности маяка, движение АНПА в окрестностях маяка, удержание АНПА в окрестности маяка.
Выполнение начального набора данных. На этом этапе осуществляются инициализация статических переменных модуля и первоначальный набор данных о дистанциях до маяка. При этом аппарат движется с крейсерской скоростью по окружности до тех пор, пока не получит iV>3 откликов от маяка. Во время движения происходят приведения на гидроакустический маяк (БАМ) после завершения аппаратом основной миссии. Приведение осуществляется с дистанции 5 км в режиме стабилизации высоты над грунтом. При этом глубина движения аппарата должна быть гораздо больше глубины положения приводного маяка (примерно 1400 м и 400 м соответственно). По траектории АНПА должен устойчиво двигаться вдоль генерального направления в сторону объекта наведения. При этом сбойные данные при расчете направления на гидроакустический маяк обнаруживаются только в случаях ложных сигналов в каналах ГАНС. При этом сравнительно большая погрешность вычисляемого пеленга (около ±30°) объясняется большим дрейфом ледяного поля вместе с ледоколом (порядка 0,5 км/ч) и отсутствием информации на борту АНПА о текущей глубине положения буксируемого антенного модуля (при этом для расчетов используется заранее заложенное приблизительное значение).
Во время движения АНПА заполняется массив, содержащий координаты аппарата, полученные по счислению пути.
Автоматическое приведение АНПА в окрестность маяка радиусом 200 м. При этом движение аппарата осуществляется на крейсерской скорости (0,9 м/с). После входа АНПА в окрестность 200 м от маяка выполнение данного этапа прекращается, и аппарат переходит к 3-му этапу.
Движение АНПА в окрестности 100-200 м от маяка. Данный этап необходим для того, чтобы АНПА «не проскочил» окрестность маяка в условиях получения дистанций один раз в 30 секунд. При этом устанавливается минимальная скорость АНПА, на которой еще возможно использование вертушечного (относительного лага для счисления («0,5-0,6 м/с). При попадании АНПА в окрестность 100 м от маяка аппарат переходит к этапу 4.
Удержание АНПА в окрестности маяка. Движение аппарата на этом этапе осуществляется на малой скорости («0,3 м/с), а его траектория напоминает «ленивую восьмерку», в центре которой находится маяк.
На этапах 2-4 программа наведения исходя из данных измерения дистанции до маяка формирует заданный курс для СУ АНПА, соответствующий предполагаемому направлению на маяк. По мере приближения к маяку контролируется расстояние до него. Кроме того, аппарат ожидает получения команды телеуправления или внутренний сигнал об окончании отведенного времени приведения (таймаут). После возникновения одного из этих событий происходит выход из программы.
Приведение на маяк может происходить как в режиме стабилизации глубины АНПА, так и в режиме стабилизации высоты (отстояния от грунта). Первый режим предпочтителен в районах, где глубина моря не превышает дальность действия доплеровского лага. Если глубины района существенно превышают данную величину, то приведение целесообразно проводить в два этапа:
- дальнее приведение на высоте от дна, обеспечивающей работу доплеровского лага; ближнее приведение на глубине, соответствующей расположению маяка.
Определение направления на маяк по дистанции до него и данным системы счисления

пути осуществляется в следующем порядке.
При определении направления (пеленга) на маяк предполагается, что отклики от источника сигнала обладают погрешностью, имеющей нормальный закон распределения с математическим ожиданием, равным нулю (2):
где p - функция распределения погрешности измерения дистанции; σ - среднеквадратичное отклонение погрешности; r - вектор истинного местоположения маяка относительно АНПА; R - измеренная дистанция до маяка; (R-|r|) - погрешность измерения дистанции. В соответствии с принятой моделью определения пеленга на маяк, при использовании трех откликов по положению АНПА (по счислению пути) в моменты определения дистанции до маяка строят «кольца», соответствующие вероятному местоположению источника сигнала для каждого из положений подводного аппарата. Радиусы этих колец равны измеренным согласно (1) дистанциям до маяка в горизонтальной плоскости, ширина соответствует погрешности измерения дальности (при этом «размытость» колец определяется видом функции p), а центры совпадают с координатами АНПА в момент определения дистанции.
Местонахождением маяка считается область пересечения наибольшего числа колец. Поэтому общая оценка вероятности нахождения маяка в любой точке пространства рассчитывается как суперпозиция оценок от каждого отклика, а пеленг на маяк<pt определяется исходя из максимизации этой суперпозиции для некоторого количества откликов N:

Поскольку координаты маяка относительно АНПА rn=q-sn, а его местоположение в системе счисления пути определяется выражением q=st+rt (для любого t), то пеленг на маяк может быть найден из:
 ,
,
где rt - местоположение маяка относительно АНПА в момент определения пеленга.
В свою очередь, местоположение маяка rt относительно АНПА в любой момент времени определяется исходя из дистанции до него Rt и пеленга <pt:

Таким образом, для выбора направления на маяк в момент времени t достаточно определить при каком <p выражение (4) принимает максимум, используя (5) для расчета rf. Можо принять, что необходимая точность определения направления на маяк не превышает 1°. При этом процедура вычислений выполняется только при получении нового отклика (два раза в минуту). Тогда для нахождения максимума можно ограничиться простым перебором (p от 0° до 360°) с шагом в 1°. Кроме того, значение выражения (4) дает представление о «степени уверенности» в правильности определения пеленга. Чем больше это значение, тем «вероятнее», что пеленг рассчитан точно (многие отклики подтверждают нахождение маяка в данной точке). Малые значения этой оценки говорят о наличии сбойных данных в величине Rt или массиве Rn. t
Однако поскольку решается задача выхода на маяк (а не высокоточного определения его местоположения), то эти оценки можно не учитывать, так как сбойные данные в определении дистанции являются преимущественно единичными, а вызываемые ими изменения траектории АНПА - некритичными.
Недостатками известной системы навигации подводного автономного необитаемого аппарата [7] являются следующие технические решения.
При реализации в известном способе инерциального счисления, используют ИНС полуаналитического типа на поплавковых гироскопах. При этом в состав ИНС входят гироскопические системы, обеспечивающие стабилизацию платформ и измерение широты, и акселерометры, измеряющие ускорения АНПА в трех плоскостях.
Наличие чувствительных элементов этих двух типов и использование относительного лага в качестве демпфирующего элемента приводит к возникновению погрешностей выработки координат со сложной структурой (В.А.Михальский, В.А.Катенин. Метрология в кораблевождении и решение задач навигации. СПб., «Элмор», 2009, с.156). Погрешности выработки широты (и курса инерциального) по характеру их проявления складываются из суточной, шулеровской, случайной составляющих и погрешности обусловленной воздействием подводных течений. В канале выработки долготы (и курса гироазимутального) к этим составляющим добавляется уход (тренд) долготы с почти постоянной скоростью на текущем интервале времени между коррекциями координат по данным СНС или ГАНС. В процессе коррекции в навигационном модуле рассчитываются и вводятся в ИНС поправки координат и поправка на скорость постоянного ухода долготы. При этом существенные соотношения погрешностей ИНС вынуждают применять сглаживание или фильтрацию случайной и шулеровской составляющих. Сглаживание на основе внутренней информации ИНС малоэффективно, поэтому реализуют фильтрацию с использованием дополнительной информации о скорости АНПА от относительного вертушечного лага (постоянно) или от абсолютного гидроакустического лага (периодически). В процессе фильтрации хорошо подавляются случайная и частично - шулеровская составляющие. Но взамен их к суточной и остаточной шулеровской погрешности добавляется нордовая составляющая сноса АНПА подводным течением. Это происходит за счет того, что демпфирование по относительной скорости приводит к частичной компенсации вместе со случайной погрешностью ИНС и скорости подводного течения, которая поэтому не полностью учитывается при расчете перемещения АНПА. В результате этого снос АНПА течением в той или иной мере входит в погрешность ИНС.(В канале долготы в состав погрешностей вносится часть восточной составляющей сноса течением).
Кроме того, использование в качестве судна обеспечения надводного судна с буксируемым антенным модулем (приводным маяком) в ледовых условиях существенно ограничивает радиус действия АНПА наличием полыньи. Проведение сеанса связи возможно только при стоянке обеспечивающего судна на якоре. При этом обсервованные координаты посредством гидроакустической навигационной системы определяют по отношению к фиксированной точке (антенному модулю), размещенному на буксируемом средстве или на морском дне методом «крюйс-дальности», так как используется только один маяк-ответчик. Запрос и прием сигнала осуществляется в три различных момента времени из трех точек, в каждой из которых определяется наклонная дальность. При известной скорости АНПА по этим данным вычисляются координаты точки (φ0, λ0), в которой АНПА находится в момент времени t2. Метод «крюйс-дальности» имеет невысокую точность, так как ошибка счисления при движении АНПА между тремя точками вносит дополнительную погрешность в определение координат. Кроме того, ввиду направленности система работает при относительно небольших углах крена и дифферента.
Энергетический потенциал системы невелик, и с учетом ограниченной мощности сигналов от маяка-ответчика и шумов моря определение координат возможно на расстоянии до 10 км от маяков-ответчиков (Ю.А.Лукомский, В.Г.Пешехонов, Д.А.Скороходов. Навигация и управление движением судов. СПб, «Элор», 2002, с.106-107).
Кроме того, дискретный во времени характер поступления информации от навигационных спутников предполагает использование счисления между обсервациями, порождающего ошибки, которые превышают погрешность спутниковой навигационной системы. Относительно невысокая точность определения координат и достаточно длительное время навигационного определения оказываются неприемлемыми для приложений, таких как обеспечение позиционирования АНПА, выполнение детальной съемки морского дна на шельфе.
Также необходимо учитывать, что измеряемые и определяемые параметры отсчитываются в различных системах пространственных координат, измерения ведутся в системе навигационного искусственного спутника Земли (НИСЗ), в то время как результаты навигационных определений фиксируются в системах, связанных с Землей (с ее центром в геоцентрической системе или с ее поверхностными точками в топоцентрических системах). Поэтому необходимо приводить эти данные к единой системе отсчета или, иными словами, согласовывать начала отсчета пространственных координат. Ввиду того, что орбитальное движение НИСЗ возмущается рядом факторов (таких как нецентральность поля тяготения Земли, притяжение Солнца и Луны, давление солнечного света и т.д.), то начала отсчета расходятся непрерывно, поэтому согласование необходимо проводить в каждом навигационном сеансе, а для этого АНПА должен всплывать при наличии полыньи во льдах, которой в период сеанса может не оказаться.
Задачей заявляемого технического решения является повышение надежности навигации АНПА в условиях использования его в арктических морях.
Поставленная задача решается за счет того, что в системе навигации автономного необитаемого подводного аппарата, включающей обеспечивающее судно, подводный автономный необитаемый подводный аппарат, комплект маяков-ответчиков, при этом обеспечивающее судно оснащено приемником спутниковой навигационной системы, системой единого времени, судовой аппаратурой управления, обработки и отображения, автономный необитаемый подводный аппарат оснащен приемопередающими блоками гидроакустической системы навигации, телеуправления и связи, навигационно-пилотажными датчиками, локальной вычислительной сетью, гидроакустическим доплеровским лагом для измерения скорости автономного необитаемого подводного аппарата относительно морского дна, лагом для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, инерциальной навигационной системой, приемником спутниковой навигационной системы, магнитным компасом, измерителем глубины, системой управления рулевыми механизмами, а еще автономный необитаемый подводный аппарат оснащен аппаратурой для выполнения гидрологических исследований, включающей гидролокатор бокового обзора, профилограф, измерители температуры и электропроводности морской среды, фотокамеры, - обеспечивающее судно выполнено в виде подводной лодки, снабженной приемопередающими блоками гидроакустической системы навигации, лаг для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности выполнен в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа и дополнительно снабжен n приемными датчиками, расположенными в носовой и кормовой частях корпуса автономного необитаемого подводного аппарата для определения скорости погружения автономного необитаемого подводного аппарата, гирокомпас выполнен в виде корректируемого гирокомпаса, построенного на базе динамически настраиваемого гироскопа и кварцевых акселерометров, инерциальная навигационная система построена на основе прецизионного гироскопа с электростатическим подвесом ротора, автономный необитаемый подводный аппарат также снабжен измерителем скорости звука, судовая аппаратура управления, обработки и отображения дополнительно содержит блок данных об эфемеридной информации о навигационных спутниках Земли, находящихся в регионе выполняемых исследовательских работ, электронную картографическую информационную навигационную систему и видеоплоттер.
Новые отличительные признаки, заключающиеся в том, что обеспечивающее судно выполнено в виде подводной лодки, снабженной приемопередающими блоками гидроакустической системы навигации, лаг для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности выполнен в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа и снабжен n приемными датчиками, расположенными в носовой и кормовой частях корпуса автономного необитаемого подводного аппарата для определения скорости погружения автономного необитаемого подводного аппарата, гирокомпас выполнен в виде корректируемого гирокомпаса, построенного на базе динамически настраиваемого гироскопа и кварцевых акселерометров, инерциальная навигационная система построена на основе прецизионного гироскопа с электростатическим подвесом ротора, автономный необитаемый подводный аппарат также снабжен измерителем скорости звука, судовая аппаратура управления, обработки и отображения дополнительно содержит блок данных об эфемеридной информации о навигационных спутниках Земли, находящихся в регионе выполняемых исследовательских работ, электронную картографическую навигационную информационную систему и видеоплоттер, позволяют существенно повысить точность навигации АНПА в условиях использования его в арктических морях.
Сущность заявляемого технического решения поясняется чертежами (фиг.1…фиг.6).
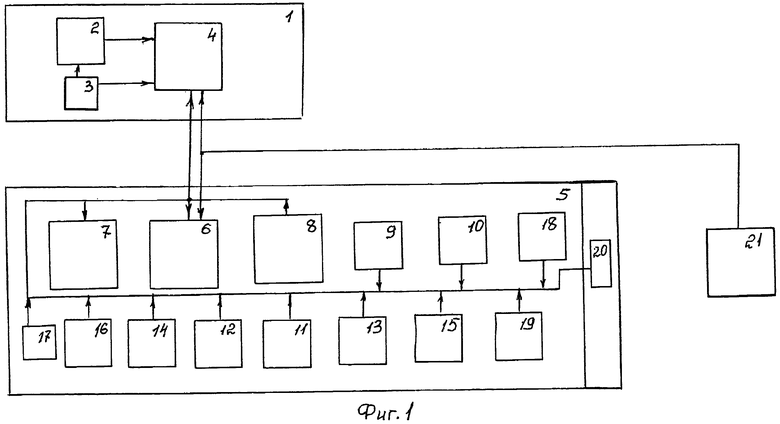
Фиг.1. Блок-схема системы навигации автономного необитаемого подводного аппарата. На блок-схеме позициями обозначены: 1 - обеспечивающее судно, оснащенное приемоиндикатором 2 спутниковой навигационной системы (GPS), системой единого времени 3, судовой аппаратурой управления, обработки и отображения информации 4, автономный необитаемый подводный аппарат 5, оснащенный приемопередающими блоками гидроакустических систем навигации, телеуправления и связи 6, навигационно-пилотажными датчиками 7, локальной вычислительной сетью 8, гидроакустическим доплеровским лагом 9 для измерения скорости автономного необитаемого подводного аппарата относительно морского дна, лагом 10 для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, инерциальной навигационной системой 11, приемником спутниковой навигационной системы 12, магнитным компасом 13, измерителем глубины 14, системой управления движением 15, аппаратурой для выполнения гидрологических исследований, включающей гидролокатор бокового обзора 16, профилограф 17, многолучевой эхолот 18 измеритель скорости звука 19 в морской среды, фотокамерами 20, 21 - комплект маяков-ответчиков.
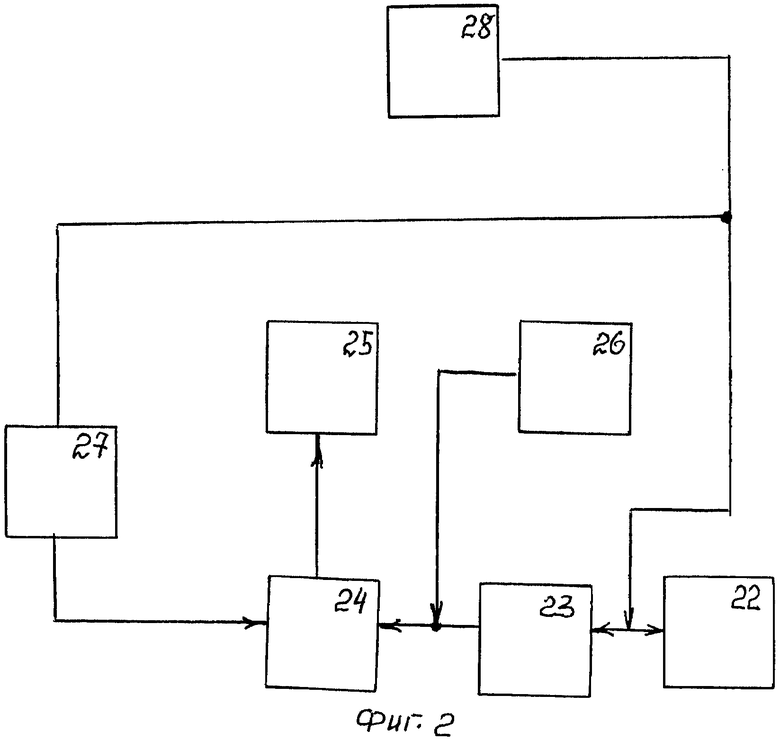
Фиг.2. Блок-схема функциональной схемы лага для измерения относительной скорости. Индукционный первичный преобразователь скорости 22, предварительный усилитель 23, измеритель полезного сигнала с компенсатором квадратурной помехи 24, интегрирующее устройство 25, корректор 26, фазирующее устройство 27, вычислительное устройство 28.
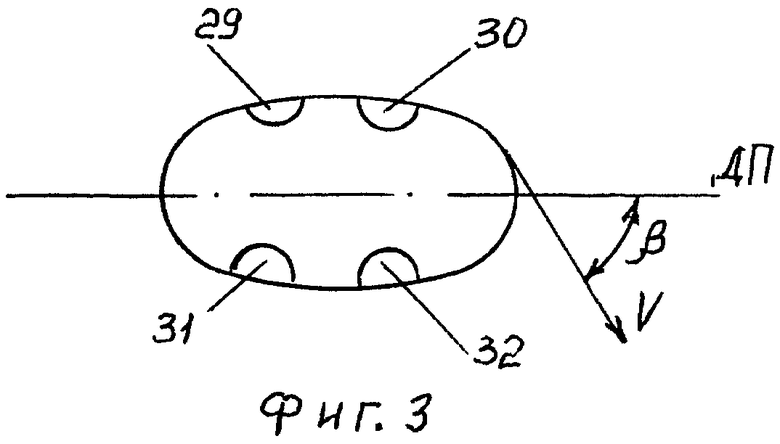
Фиг.3. Схема размещения измерительных электродов индукционного первичного преобразователя скорости. Измерительные электроды 29, 30, 31, 32. V - вектор относительной скорости, ДП - диаметральная плоскость судна, β - угол дрейфа.
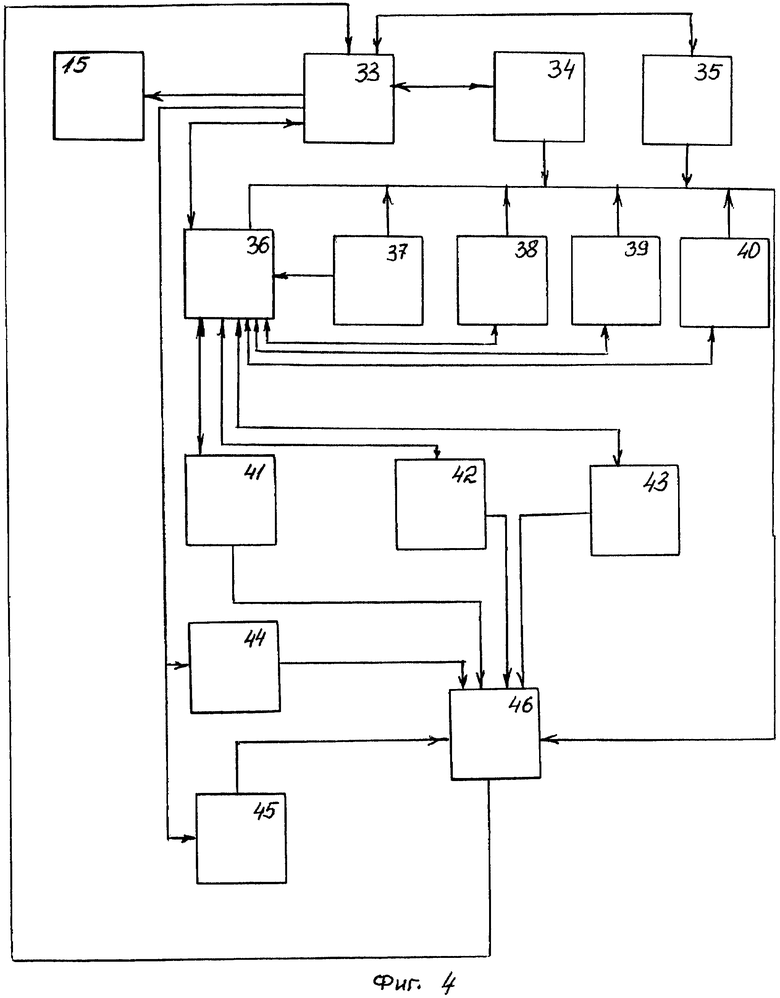
Фиг.4. Блок-схема поста управления движением автономного необитаемого подводного аппарата. Пост управления движением автономного необитаемого подводного аппарата (АНПА) включает пульт 33 управления глубиной при отсутствии скорости хода АНПА; прибор отображения информации 34 о рекомендованных значениях курса и глубины; указатель крена 35; указатель курса 36; указатель положения вертикального руля 37; указатель положения большого кормового горизонтального руля 38; указатель положения носового горизонтального руля 39; указатель положения малого кормового горизонтального руля 40; указатель глубины (0…60 м) 41; указатель глубины под килем 42; указатель дифферента 43; пульт управления движением 44 АНПА в нормальных режимах эксплуатации; пульт управления движением 45 АНПА в аварийных ситуациях, индикаторную панель 46 для отображения заданных и текущих навигационных параметров АНПА, картографической и топографической информации.
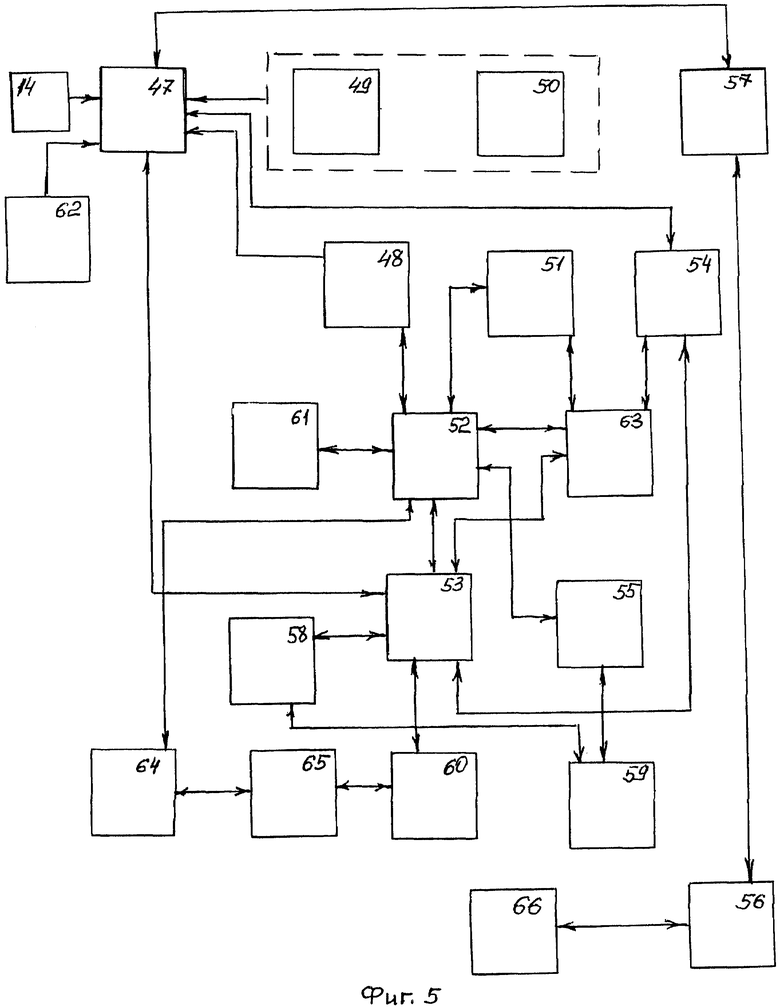
Фиг.5. Структурная схема системы управления, размещенная на АНПА. Структурная схема системы управления, размещенная на АНПА, включает блок управления 47, блок усилителей 48, измеритель глубины 14, навигационно-пилотажные датчики 7, включающие измерители крена 49 и дифферента 50, приборы обратной связи 51 носового горизонтального руля, соединительные коробки 52, золотник 53 аварийного управления, золотник 54 управления, приборы обратной связи 55 вертикальных рулей, гидропривод 56 с краном манипулятором, приборы обратной связи 57 системы стабилизации без хода, гидравлический привод 58 вертикальных рулей 59, гидравлический привод 60 горизонтальных рулей 61, предсказатель 62, золотник 63 переключения, прибор обратной связи 64 кормового горизонтального руля 65, цистерны 66 стабилизации без хода.
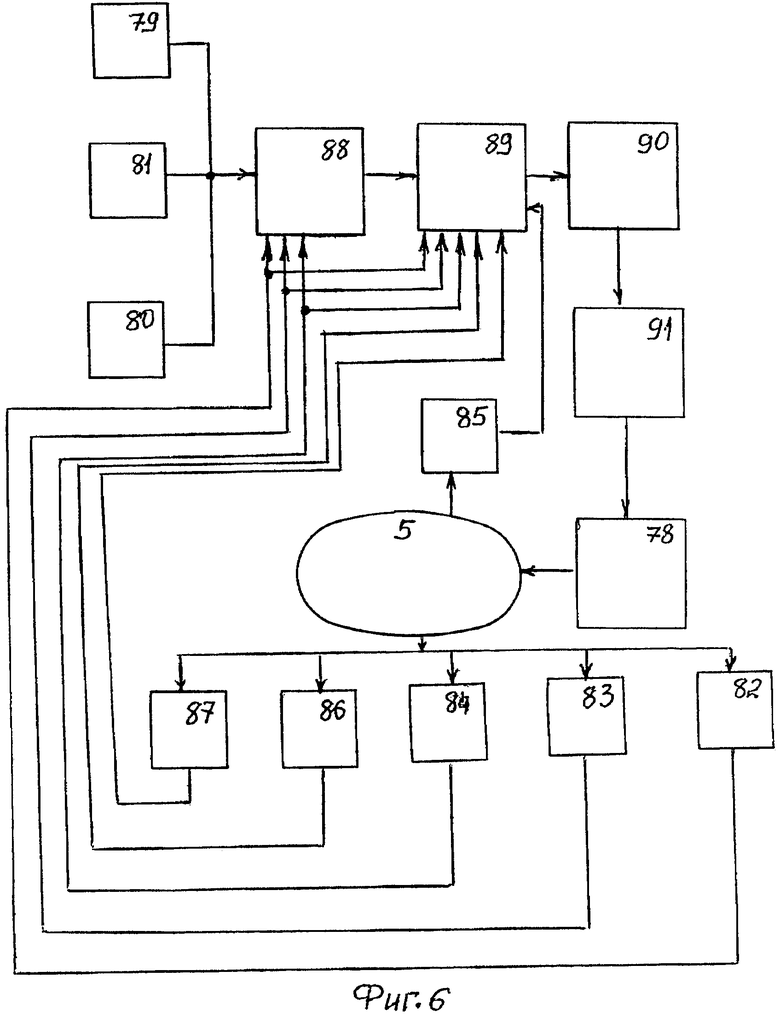
Фиг.6. Функциональная схема системы управления движением АНПА-9. Позициями обозначены: рули 78; датчики соответственно заданных значений дифферента 79, курса 80, глубины погружения 81, датчики обратной связи текущих значений глубины погружения 82, курса 83, дифферента 84, скорости 85, положения горизонтальных рулей 86, положения вертикальных рулей 87, суммирующее устройство 88, вычислитель 89, блок суммарного электрического сигнала управления 90, электрогидравлический преобразователь 91.
В качестве обеспечивающего судна 1 использована подводная лодка со штатным навигационным оборудованием и штатными техническими средствами движения и судовой автоматики, списанная из состава ВМФ.
Аналогом обеспечивающего судна 1 является известная подводная лодка для морских исследований (Новинки в мире ВВТ в 2008 году, nvo.ng.ru, 2008-12-26. 2. Тарас А.Е. Атомный подводный флот 1955-2005. М.: ACT, Харвест, 2006, с.41-216. ISBN 985-13-8436-4), которая имеет следующие характеристики.
Скорость: надводная 4,5 уз, подводная 3,5 уз. Предельная глубина погружения 915 м. Автономность 16 суток, предельная 25 суток. Экипаж 13 человек. Водоизмещение 400 т. Длина 45 м, прочный корпус 29,3 м, ширина 3.8 м, по стабилизаторам 48 м. Осадка 4,6 м.
Известная подводная лодка для морских исследований имеет следующее оборудование.
Реактор, 2 электромотора, 2 гребных вала, 4 подруливающих устройства.
Основой энергетической установки является атомный реактор, передающий энергию на генератор переменного тока. Генератор питает два электромотора, которые вращают два гребных винта. Рули глубины размещены на рубке, вертикальный руль имеет обычную конструкцию и размещен в хвосте. Маневренность лодки улучшают четыре поворотных подруливающих устройства.
Она также оснащена комплексом электронного, компьютерного и гидроакустического оборудования, который решает задачи навигации, связи, обнаружения и идентификации подводных объектов, а также подъема находок на поверхность. Лодка способна изучать морское дно, измерять температуру и направление течений, получать различную информацию для коммерческого и научного использования. Она обладает очень высокой маневренностью. Ценной особенностью является способность висеть в воде без движения, позиционируясь с высокой точностью. Атомный реактор обеспечивает независимость от надводных кораблей обеспечения и позволяет двигаться в погруженном состоянии длительное время.
Для глубоководных работ лодка оснащена выдвижными колесами, тремя иллюминаторами, системой внешнего освещения, неподвижными и подвижными телекамерами, многоцелевым захватом-манипулятором, корзиной для образцов и вспомогательных приспособлений. Ориентирование на поверхности осуществляется при помощи телекамеры, зафиксированной на неопускаемой мачте на крыше рубки вместо выдвижного перископа.
Благодаря способности оставаться длительное время под водой, лодка является главным инструментом глубоководного поиска. При этом она работает даже тогда, когда погодные условия на поверхности и морское волнение заставляют все надводные суда возвращаться в порт.
Применение подводной лодки в качестве обеспечивающего судна при проведении широкомасштабных подводных исследований с использованием АНПА в условиях замерзающих морей диктуется тем, что использование надводных судов в ледовых условиях практически невозможно. Кроме того, наличие на обеспечивающем судне приемопередающих устройств гидроакустической навигационной системы, позволяет использовать ее в качестве приводного маяка. При этом обеспечивающее судно, в условиях даже очень сложной ледовой обстановки имеет возможность широкого маневрирования, что позволяет использовать его в качестве обеспечивающего судна для нескольких АНПА одновременно, а при оснащении ее устройством подледного приема сигналов спутниковой навигационной системы (патент RU 2342746) обеспечивается определение с требуемой точностью поправки к истинному курсу, вырабатываемому ИНС подводного объекта, при нахождении его подо льдом.
Сущность данного способа (патент RU 2342746) заключается в том, что в способе подледного приема сигналов СНС производится приледнение подводного объекта к нижней кромке льда рубкой и носовой частью в местах, где установлены антенны приемников СНС, ввод этих антенн в искусственно образованные полости во льду, при этом освобождаются полости от воды и принимаются на "сухие" антенны сигналы космического аппарата, по которым определяют обсервованные координаты мест размещения указанных антенн и по полученным данным определяют расчетным путем поправку к истинному курсу, вырабатываемому ИНС подводного объекта. При этом при нахождении АНПА на одной вертикальной линии с обеспечивающим судном (подводной лодкой) эти поправки могут вводиться и в ИНС АНПА при невозможности его всплытия по ледовым условиям.
Поскольку в сетевых СНС измерения проводятся одновременно по нескольким НИСЗ (которые выбираются из числа НИСЗ, находящихся над радиогоризонтом), то на обеспечивающем судне 1 имеется априорная информация о положении и движении всех НИСЗ, входящих в систему, которая уточняется при каждом сеансе связи. Так как при каждом сеансе связи каждый НИСЗ наряду с собственными эфемеридами ретранслирует на борт обеспечивающего судна эфемериды всех остальных НИСЗ системы, то в навигационном модуле обеспечивающего судна создается альманах о положении и движении всех НИСЗ, входящих в систему с прогнозом на пять недель, что позволяет заранее выбрать благоприятные условия для всплытия обеспечивающего судна как по ледовым условиям, так и по выбору из общей совокупности видимых НИСЗ рабочего созвездия для расчета для выбранной группы НИСЗ ожидаемых значений угловых координат, дальности и радиальной скорости.
В предлагаемом техническом решении используется дальномерная система из восьми маяков-ответчиков, расположенных в точках с координатами φi, λi на глубине Hi. Бортовая аппаратура АНПА измеряет времена распространения гидроакустического сигнала для маяков ti, по которым определяются наклонные дальности Di. При известных заранее координатах маяков φi, λi, Hi и определенных дальностях Di на борту АПНА вычисляют его координаты φ0, λ0.
При этом при каждой обсервации выделяются наиболее устойчивые сигналы от маяков-ответчиков, находящихся в рабочей зоне приема гидроакустических сигналов.
Формируемая на морском дне ГАНС имеет наклонную дальность связи с маяками-ответчиками не менее 10 км. Флуктуационная ошибка определения координат не превышает 10 м. Способ разделения маяков-ответчиков по каналам частотный. Диапазон рабочих частот 7-14 кГц. Автономность маяков-ответчиков по энергоресурсу с элементами питания «alkaline» LR20, емкостью 16 А·ч 3 года. Диаграмма направленности антенны - верхняя полусфера.
Для реализации предлагаемого технического решения используется ИНС геометрического типа на электростатических гироскопах, посредством которой вырабатывают координаты АНПА, курс и составляющие вектора скорости по осям координат, динамические параметры - углы крена и дифферента АНПА, а также линейные скорости и ускорения. При этом математическая модель построена на основе метода протяженной коррекции с использованием информации от гидроакустического абсолютного лага, работающего в непрерывном режиме.
На АНПА небольших размеров, вместо ИНС может быть установлен гирокомпас. В конкретной промышленной реализации использован гирокомпас типа «Гюйс», который представляет собой корректируемый гирокомпас, построенный на базе динамически настраиваемого гироскопа и кварцевых акселерометров.
Корректируемая инерциальная система (ИНС), используя информацию гироскопов и акселерометров, обеспечивает автономную выработку навигационных и динамических параметров движения морского объекта, используя корректирующую информацию спутниковой навигационной системы о координатах места объекта. В сложных условиях эксплуатации спутниковой системы, при сокращении орбитальной группировки космических аппаратов, реализуется резервный режим коррекции инерциальной системы по данным первичных измерений. Система работает таким образом, что по данным внешней информации и навигационных данных ИНС формируются сигналы коррекции системы, что повышает точность навигационных определений в штатных условиях функционирования.
Лаг для измерения относительной скорости представляет собой индукционный лаг, основанный на законе электромагнитной индукции и измеряющий модуль вектора относительной скорости (V) и угол дрейфа (β) АНПА (фиг.2, фиг.3). Аналогом лага является индукционный лаг - дрейфомер (Судовые измерители скорости. Под ред. Хребтова А.А., Л., Судостроение, 1978, с.52-54). При этом на наружной поверхности индукционного первичного преобразователя (датчика) скорости 22, размещают измерительные электроды 29, 30, 31, 32. Если АНПА движется без дрейфа (β=0), то направление потока воды будет параллельно диаметральной плоскости АНПА и оси симметрии датчика. При этом скорости обтекания потоком воды электродов 29, 30 и 31, 32 будут одинаковы, а значит, и разности потенциалов на этих электродах будут равны по величине и пропорциональны относительной скорости АНПА.
При наличии дрейфа симметрия поля скоростей потоков, обтекающих датчик 22, нарушается. Скорости обтекания со стороны электродов 29, 30 увеличатся, а со стороны электродов 31, 32 уменьшатся. Разности потенциалов на электродах 29, 31 и 30, 32 будут отличны друг от друга, и это различие будет тем больше, чем больше будет угол дрейфа АНПА.
Информацию, вырабатываемую лагом 10 и магнитным компасом 13, используют для определения счислимых координат, в случаях отсутствия информации от других технических средств навигации.
При размещении еще двух пар электродов по бортам АНПА в носовой и кормовой частях, при погружении АНПА без хода можно измерить скорость погружения АНПА в вертикальной плоскости, что позволит заблаговременно исключить возникшую неблагоприятную тенденцию увеличения скорости погружения АНПА в придонных слоях водной среды, путем введения в алгоритмы автоматического управления вертикальной скорости Vz.
Измерение скорости погружения АНПА в вертикальной плоскости, при решении задач оценивания координат АНПА, инструментально не производится, а выполняется путем восстановления, как неизмеряемых координат посредством фильтра Калмана, с помощью уравнения Риккати, решение которого в реальном времени на бортовых вычислителях затруднено ввиду большой размерности (Решение задачи оценивания координат подводных аппаратов / Л.В.Евстигнеева, Г.Э.Острецов, Н.Н.Тарасов, М.Г. Тахтамышев // Судостроение, 2010, №1, с.38-39).
Измеритель скорости звука 19 в морской среде выполнен в виде циклического скоростемера, который представляет собой замкнутое через морскую воду акустическое кольцо синхронизации, образованное двумя акустическими преобразователями (излучающий преобразователь) и (приемный преобразователь), усилителем и импульсным генератором, запускаемым по сигналам с выхода усилителя. Частота следования импульсов в подобном кольце пропорциональна скорости звука в воде. В частотном дискриминаторе эта частота следования сравнивается с частотой излучаемого гидроакустическими средствами (гидроакустического лага или эхолота, или профилографа, или гидролокатора бокового обзора, или бортовым приемо-передатчиком ГАНС) сигнала, который представляет собой гармонику сигнала в кольце. При изменении скорости звука в воде на выходе частотного дискриминатора появляется управляющее напряжение того или иного знака, изменяющее соответствующим образом частоту излучаемого гидроакустическим средством сигнала. При этом автоматически поддерживается постоянной длина волны колебаний, излучаемых тем или иным гидроакустическим средством. Делитель частоты соединен своим входом с выходом генератора, управляемого напряжением, который своим входом соединен с выходом частотного дискриминатора, а своим выходом соединен с усилителем мощности излучаемого сигнала. (Судовые измерители скорости. Под ред. Хребтова А.А., Л., Судостроение, 1978, с.133).
Излучающий и приемный преобразователи измерителя скорости звука 19 в морской среде установлены на корпусе АНПА на горизонте излучающих и приемных антенн гидроакустических средств.
Электронная картографическая навигационная информационная система (ЭКНИС) представляет собой ЭКНИС типа «СОЭНКИ 4000-19» (Судостроение, №4, 2010, с.54) и предназначена за контролем передвижения АНПА при производстве исследовательских работ в прибрежной зоне, в надводном положении.
Видеоплоттер подключен к штатным гидроакустическим средствам (эхолоту, гидролокатору бокового обзора) обеспечивающего судна, и при нахождении АНПА в зоне действия этих средств оператор получает изображение о местонахождении АНПА относительно дна и обеспечивающего судна. Аналогом является панорамный эхолот-видеоплоттер типа ПЭВ-К (В.А.Воронин, С.П.Тарасов, В.И.Тимошенко. ЭКНИС и видеоплоттер входят в состав судовой аппаратуры управления, обработки и отображения информации 4.
Гидроакустические параметрические системы. Ростов-на-Дону, Ростиздат. 2004, с.302-307).
Система управления движением подводного аппарата (СУД ПА) предназначена для автоматического, дистанционного и аварийного управления движением ПА по курсу, глубине, а также для управления его дифферентом.
Аналогами гидроакустических средств зондирования (многолучевой эхолот, профилограф, гидролокатор бокового обзора) являются аналогичные средства, приведенные в кн. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов-на-Дону, Ростиздат, 2004. - 400 с.
При конкретной практической реализации применены многолучевой эхолот типа «R2Sonic 2022» с центральным лучом 1 градус, профилограф с линейно-частотной модуляцией типа «Chirp» с глубиной проникновения под поверхность дна около 200 м, батиметрический гидролокатор типа «Benthos C3D» с шириной полосы обзора 1,2 км.
Система управления движением АНПА (СУД АНПА) предназначена для автоматического, дистанционного и аварийного управления движением АНПА по курсу, глубине, а также для управления его дифферентом.
Управление маневрированием АНПА и его пространственное движение условно разделяют на движение в вертикальной и горизонтальной плоскостях. В качестве критерия динамической устойчивости используют критерий:
 ,
,
где Cy,  - гидродинамические коэффициенты момента подъемной силы и момента демпфирования соответственно;
- гидродинамические коэффициенты момента подъемной силы и момента демпфирования соответственно;

где M - масса АНПА; D - полное водоизмещение; L - длина АНПА.
АНПА динамически устойчив при отрицательной величине коэффициента x. При x=0 АНПА динамически нейтрален. При x>0 ПА динамически неустойчив. Высокие скорости движения и сравнительно небольшие глубины погружения современных АНПА обеспечивают его динамическую устойчивость при движении в вертикальной плоскости. При движении в горизонтальной плоскости явление неустойчивости АНПА не грозит пагубными последствиями, такими как возможность его провала за рабочую глубину. Однако АНПА обладают инверсной скоростью, при которой АНПА не управляется кормовыми горизонтальными рулями (ГР). В этом случае центр давления ГР проходит через центр балансировки. При сравнительно высоких скоростях хода положительная перекладка рулей приводит к погружению АНПА. На малых скоростях та же перекладка становится причиной всплытия АНПА. Для современных АНПА инверсная скорость обычно составляет 1,5…4 уз. Для носовых ГР инверсная скорость не имеет значения, т.к. они расположены вне центра перемещения балансировки.
В ходе проведения исследовательских работ с использованием АНПА в процессе пространственной циркуляции совершается маневрирование АНПА по курсу, с одновременным движением в поперечной плоскости по крену. При этом при появлении угла дрейфа возникает поперечное обтекание АНПА, при котором появляются возмущающие гидродинамические силы в вертикальной плоскости, меняются условия балансировки АНПА и возникает необходимость стабилизации АНПА по глубине.
Также была выявлена структурная неустойчивость движения АНПА, установлена существенная зависимость кренящих моментов от знака балансировочных углов дифферента и кормовых горизонтальных рулей при циркуляции, что требует координированного управления перьями вертикальных и горизонтальных рулей АНПА при пространственной циркуляции. При циркуляции в подводном положении современные АНПА имеют внутренний крен, вызванный превышением центра давления над центром тяжести из-за наличия выступающих конструктивных элементов корпуса, например рубки. При этом угол крена АНПА может достигать 30…35° в начальный период выполнения маневра и 7…10° на установившейся циркуляции.
При пространственном маневрировании АНПА осуществляется одновременный переход по курсу и глубине при координированном управлении креном. Основной критерий при пространственном маневрировании - быстродействие переходных процессов по курсу и глубине при наложении ограничений на текущие координаты по углу крена и дифферента. Кроме того, требуется обеспечить выход АНПА на заданную глубину и курс с определенной величиной перерегулирования, не превышающей заданные параметры. Натурные испытания АНПА показали, что наблюдается существенное влияние кренящих моментов как на устойчивость процесса стабилизации АНПА, так и на динамику пространственных маневров. Координированное управление рулями при пространственном маневрировании позволило повысить на 40…60% быстродействие управления АНПА для сильных маневров по глубине, углы дифферента АНПА при подводном маневрировании достигают 20…30°, а скорость погружения или всплытия 6…9 м/с.
Возможны три случая маневрирования ПА по курсу, в которых предполагается:
1) наличие запаса по мощности ГЭУ;
2) отсутствие запаса по мощности ГЭУ;
3) движение на минимальной скорости хода.
В первом случае необходимо увеличение скорости до значения, обеспечивающего оптимальное маневрирование АНПА с учетом ограничений на углы перекладки. Во втором случае требуется снижение скорости хода до значения, соответствующего максимально возможной угловой скорости циркуляции при ограничении на кладку нижнего пера ВР. В третьем случае возникает необходимость форсированного увеличения скорости хода АНПА при циркуляции с одновременным выходом в конце переходного периода по заданным значениям курса и скорости хода. Эти мероприятия обеспечивают сокращение времени выхода на заданный курс на 30…50%. В целом координированное управление рулями и оборотами главного турбозубчатого агрегата (ГТЗА) существенно повышает маневренные характеристики АНПА.
При движении АНПА на малых скоростях хода в целях обеспечения его форсированного выхода на глубину, позволяющую использовать спутниковый канал связи, возникает задача совместного управления рулями и цистернами вспомогательного и специального балласта. Управление рулями строится по бездифферентной схеме, при которой кормовые рули стабилизируют дифферент АНПА, а носовые рули, совместно с управлением плавучестью балластных цистерн, создают подъемную или топящую силу для маневрирования АНПА по глубине. Совместное управление плавучестью и рулями позволило повысить быстродействие АНПА при управлении глубиной погружения и в целом существенно улучшить его маневренные характеристики на малых скоростях.
Стабилизация невозмущенного движения включает режим плавания дифферентованного АНПА на больших глубинах, где практически отсутствует влияние взволнованной поверхности моря, придонных течений. В целом, в этом режиме плавания влияние внешних возмущающих воздействий не соизмеримо с эффективностью регулирующих органов, в качестве которых используются горизонтальные и вертикальные рули с разрезной конструкцией баллера. В данном режиме плавания осуществляется автоматическая стабилизация угловых пространственных координат движения АНПА: крена, дифферента, курса и глубины погружения. В зависимости от скорости хода АНПА рули подключаются к управлению в различном сочетании, определяемом условиями эксплуатации АНПА. В частности, стабилизация курса осуществляется на максимальных скоростях хода в подводном положении с использованием верхнего пера руля, либо верхнего и нижнего пера руля, в надводном положении - с использованием нижнего пера вертикального руля.
Стабилизация крена осуществляется при использовании кормовых, носовых и вертикальных рулей раздельно и совместно со стабилизацией курса и глубины погружения. Стабилизация дифферента осуществляется с использованием кормовых больших и малых горизонтальных рулей. Стабилизация глубины погружения осуществляется с использованием больших и малых кормовых горизонтальных рулей совместно с носовыми рулями. Бездифферентное управление АНПА обеспечивается использованием носовых рулей по глубине, а кормовых рулей по дифференту. На средних и малых скоростях хода на АНПА начинают влиять внешние возмущения, такие как обжатие корпуса, изменение плотности морской воды, течения моря и т.п., приводящие к раздифферентовке АНПА по силе и моменту.
При плавании на небольшой глубине от поверхности воды, серьезной проблемой становится обеспечение устойчивой стабилизации глубины и дифферента АНПА. Это обусловлено влиянием взволнованной поверхности моря, воздействием экранных сил, зависящих от глубины погружения, скорости хода и курсового угла движения к направлению распространения волн, существенно меняющих устойчивость стабилизации АНПА [3, 4]. В связи с неопределенностью спектральных характеристик волнения, значений положительной нормальной силы, способствующей выбрасыванию АНПА на поверхность, при всплытии на малую глубину практически невозможна точная дифферентовка АНПА по силе и моменту. Это приводило к срыву режима стабилизации, подвсплытию АНПА, оголению винтов при изменении дифферента. При этом исследования показали, что введение носовых горизонтальных рулей для стабилизации АНПА на перископной глубине обеспечивает устойчивость стабилизации АНПА в целом. Однако влияние волновых помех приводит к уменьшению компенсационных возможностей носовых рулей, и устойчивость резко снижается. При волнении ухудшается управляемость АНПА в надводном положении, и, в частности, при изменении курса возникают большие перерегулирования относительно нового курса.
Специфика применения способа всплытия "без хода" для приледнения АНПА в высокоширотных акваториях относит этот режим плавания к числу наиболее важных. Особенность построения алгоритмов управления заключается в необходимости обеспечения требуемого запаса устойчивости стабилизации при существенном влиянии сил обжатия прочного корпуса АНПА, всплытия с регулируемой скоростью изменения глубины погружения и учета дифферентующих моментов АНПА, вызванных смещением плеча цистерн управления плавучестью относительно его центра тяжести.
Для управления движением АНПА на обеспечивающем судне организуется пост управления движением автономного необитаемого подводного аппарата (АНПА), который включает (фиг.2) пульт 33 управления глубиной при отсутствии скорости хода АНПА; прибор отображения информации 34 о рекомендованных значениях курса и глубины; указатель крена 35; указатель курса 36; указатель положения вертикального руля 37; указатель положения большого кормового горизонтального руля 38; указатель положения носового горизонтального руля 39; указатель положения малого кормового горизонтального руля 40; указатель глубины (0…60 м) 41; указатель глубины под килем 42; указатель дифферента 43; пульт управления движением 44 АНПА в нормальных режимах эксплуатации; пульт управления движением 45 АНПА в аварийных ситуациях, индикаторную панель 46 для отображения заданных и текущих навигационных параметров АНПА, картографической и топографической информации.
Маневрирование АНПА в пространстве при наличии скорости хода обеспечивают рулевые комплексы. Для более эффективного управления рули максимально удалены от корпуса АНПА. В зависимости от места расположения рули могут быть кормовыми, носовыми, средними и рубочными (при наличии рубки). В свою очередь, кормовые рули подразделяются на вертикальные и горизонтальные. Вертикальные рули обеспечивают управление курсом АНПА, горизонтальные рули - дифферентом и глубиной погружения. Применение на АНПА двух пар горизонтальных рулей объясняется, прежде всего, наличием инверсионной скорости хода. При этом значении скорости и более низких скоростях управление АНПА с помощью кормовых горизонтальных рулей становится невозможным. В таких случаях управление производится носовыми горизонтальными рулями.
Функционально система управления движением представляет собой совокупность следующих подсистем:
- подсистема нормального управления на ходу, осуществляющая формирование алгоритмов нормального управления как автоматического, так и дистанционного;
- подсистема противоаварийного управления, осуществляющая алгоритмы выявления аварийных ситуаций, выработку рекомендаций по локализации аварийных ситуаций и выработку управляющих воздействий на исправные технические средства;
- подсистема управления глубиной при отсутствии хода;
- локальная система управления, осуществляющая по управляющим сигналам от подсистемы нормального и противоаварийного управления выработку сигналов управления на исполнительные органы.
Подсистема нормального управления представляет собой двух- или трехканальную систему (в зависимости от проекта АНПА и принятого на нем числа каналов, а также гидравлики управления рулевой машиной). При этом число каналов решающей части во всех случаях одинаково и составляет три. Подсистема управления глубиной погружения в режиме стабилизации глубины "без хода" представляет собой одноканальную систему автоматического и дистанционного управления.
Структура алгоритмов управления имеет следующий вид:
а) 
где ψ'=ψ-ψзад - рассогласование по дифференту; kψ,  - коэффициенты регулирования.
- коэффициенты регулирования.
Этот вид управления обеспечивает стабилизацию дифферента:
б) 
где Δη - рассогласование по глубине; kψA, - коэффициенты регулирования,


где  - сигнал управления по глубине кормовых горизонтальных рулей;
- сигнал управления по глубине кормовых горизонтальных рулей;  - сигнал управления по глубине носовых горизонтальных рулей;
- сигнал управления по глубине носовых горизонтальных рулей;  ,
,  ,
,  - коэффициенты регулирования.
- коэффициенты регулирования.
Автоматическое управление с помощью кормовых горизонтальных рулей осуществляется на основе алгоритмов (9) и (10) и обеспечивает устойчивое управление с требуемым качеством в режимах стабилизации и маневрирования. Автоматическое управление глубиной с помощью носовых горизонтальных рулей осуществляется на основе алгоритма (11). Одновременное использование кормовых горизонтальных рулей по алгоритму (11) позволит получить новое качество - управление с малым дифферентом (2…3°), определяемым статическими свойствами алгоритма (8).
в) управление курсом осуществляется с помощью вертикальных рулей на основе алгоритма:

где kφ,  , k∫ - коэффициенты регулирования.
, k∫ - коэффициенты регулирования.
Система управления движением подводного аппарата (СУД ПА) предназначена для автоматического, дистанционного и аварийного управления движением ПА по курсу, глубине, а также для управления его дифферентом и включает следующие узлы и механизмы (фиг.3): блок управления 47, блок усилителей 48, измеритель глубины 19, навигационно-пилотажные датчики 12, включающие измерители крена 49 и дифферента 50, приборы обратной связи 51 носового горизонтального руля, соединительные коробки 52, золотник 53 аварийного управления, золотник 54 управления, приборы обратной связи 55 вертикальных рулей, гидропривод 56 с краном-манипулятором, приборы обратной связи 57 системы стабилизации без хода, гидравлический привод 58 вертикальных рулей 59, гидравлический привод 60 горизонтальных рулей 61, предсказатель 62, золотник 63 переключения, прибор обратной связи 64 кормового горизонтального руля 65, цистерны 66 стабилизации без хода.
Основные функции системы и, соответственно, основные каналы: управление движением по курсу; управление движением по глубине; стабилизация заданного дифферента; стабилизация глубины без хода.
В каждом канале управления осуществляются следующие виды управления:
- автоматическое управление (АУ);
- дистанционное управление (ДУ);
- аварийное управление (АВУ).
Между перечисленными видами управления существует определенная система приоритетов, которую необходимо иметь в виду при эксплуатации. Смысл ее заключается в следующем. Во-первых, в качестве основного режима управления в системе принят режим автоматического управления. Этот режим используется в подавляющем большинстве случаев. Однако если в режиме АУ оператор примет управление "на себя" одновременно с действием автоматики (т.е. начнет осуществлять дистанционное управление), то регулирующие органы (рули) будут реагировать на сигналы ДУ, а не АУ. В то же время, если при включенном режиме АУ или ДУ производим аварийное управление рулями, то рули не будут реагировать на сигналы АУ или ДУ. Таким образом, режим аварийного управления обладает наивысшим приоритетом по сравнению со всеми остальными; в то же время режим автоматического управления оказывается основным по использованию.
По характеру используемых источников энергии система является электрогидравлической. Это означает, что функционально СУД состоит из двух частей - электрической и гидравлической. Электрическая часть представляет собой электронную схему формирования сигнала управления, который, воздействуя на гидравлическую часть, осуществляет изменение положения регулирующих органов.
Поскольку в системе управления движением АНПА используются классические принципы построения САУ, в частности принцип регулирования "по отклонению", в ее состав входят все функциональные элементы, присущие такой системе: объект регулирования; датчик и задатчик регулируемой величины; суммирующее устройство (сумматор); усилитель; исполнительный механизм; исполнительные органы.
Функциональная схем СУД АНПА приведена на фиг.5. АНПА-9, рули 78; датчики соответственно заданных значений дифферента 79, курса 80, глубины погружения 81, датчики обратной связи текущих значений глубины погружения 82, курса 83, дифферента 84, скорости 85, положения горизонтальных рулей 86, положения вертикальных рулей 87, суммирующее устройство 88, вычислитель 89, блок суммарного электрического сигнала управления 90, электрогидравлический преобразователь 91.
Объект регулирования системы - АНПА-9; его регулируемыми параметрами, в зависимости от режима работы, могут быть: глубина погружения, курс, дифферент. Их текущие значения вырабатывают соответствующие датчики. Напряжение, пропорциональное текущему значению регулируемых параметров, поступает на суммирующее устройство (СУ). Это устройство вырабатывает сигнал в виде электрического напряжения, пропорциональный разности текущего и заданного значения регулируемой величины (сигнал рассогласования).
В качестве датчика регулируемой величины служит линейный вращающийся трансформатор, разворотом ротора которого оператор задает требуемое значение с пульта управления в соответствии со значениями дифферента 79, курса 80, глубины погружения 81. Сформированный суммирующим устройством 88 сигнал рассогласования поступает в вычислительное устройство (вычислитель 89) вместе с другими параметрами, необходимыми для формирования сигнала управления исполнительными органами.
Вычислительное устройство (ВУ) предназначено для формирования закона управления объектом в виде суммарного электрического сигнала управления (СЭСУ). В ВУ поступают сигналы: текущей глубины погружения, текущего курса, угла поворота рулей и др. Вычислительное устройство формирует из этих сигналов величины их производных и интегралов, необходимых для формирования СЭСУ (блок суммарного электрического сигнала управления 90). Порядок формирования СЭСУ зависит от режима работы и управления, включенного в системе, и будет рассмотрен отдельно для каждой подсистемы. Сформированный СЭСУ усиливается по мощности и поступает через электрогидравлический преобразователь на исполнительный механизм.
Исполнительный механизм (ИМ) системы предназначен для непосредственного управления исполнительными органами. Кроме того, он обеспечивает преобразование СЭСУ в гидравлический сигнал. Функционально ИМ состоит из гидравлического сервомотора (ГСМ), непосредственно воздействующего на рули АНПА. Исполнительные органы системы - горизонтальные и вертикальный рули, изменяющие положение АНПА в пространстве.
Предлагаемая система навигации необитаемого подводного аппарата может быть реализована на основе узлов и элементов, измерительной аппаратуры, представленной на рынке.
Источники информации
1. Allen В., Austin Т., Forrester N. et al. Autonomous Docking Demonstrations with Enhanced REMUS Technology // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1.
2. Utley С, Lee H. Signal Processing Algorithms for High-Precision Three-Dimensional Navigation and Guidance of Unmanned Undersea Vehicles (UUV) // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1.
3. Grant M. de Goede, Donald Norris. Recovering Unmanned Undersea Vehicles With a Homing and Docking Sonar // Proc. of OCEANS 2005 MTS/IEEE. Washington, D.C., USA, 18-23 September 2005. USA CD-ROM. ISBN 0-933957-33-5.
4. Inzartsev A.V., Matvienko Yu.V., Pavin A.M., Vaulin Yu.V., Scherbatyuk A.Ph. Algorithms of Autonomous Docking System Operation for Long Term AUV // Proc. of 14th Int. Symp. on Unmanned Untethered Submersible Technology (UUST05), Durham, New Hampshire, USA, August 21-24, 2005.
5. Ваулин Ю.В., Инзарцев А.В., Матвиенко А.В., Павин A.M., Щербатюк А.Ф. Исследование работы элементов системы приведения автономного необитаемого подводного аппарата // Матер, междунар. науч.-техн. конф. «Технические проблемы освоения мирового океана». Владивосток, 14-17 сентября, 2005. Владивосток: Дальнаука, 2005. С.40-45.
6. Киселев Л.В., Инзарцев А.В., Матвиенко Ю.В., Ваулин Ю.В. Навигация и управление в подводном пространстве // Мехатроника, автоматизация, управление 2004. №11. С.35-42.
7. A.M.Павин. Автоматическое приведение автономного подводного робота к гидроакустическому маяку // Подводные исследования и роботехника. 2008 №5(1) с 32-38.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
Изобретение относится к области навигации, а более конкретно к способам навигации автономных необитаемых подводных аппаратов. Заявлена система навигации автономного необитаемого подводного аппарата, включающая обеспечивающее судно, подводный автономный необитаемый подводный аппарат, комплект маяков-ответчиков. Обеспечивающее судно оснащено приемником спутниковой навигационной системы, системой единого времени, судовой аппаратурой управления, обработки и отображения. Автономный необитаемый подводный аппарат оснащен приемопередающими блоками гидроакустической системы навигации, телеуправления и связи, навигационно-пилотажными датчиками, локальной вычислительной сетью. В нем также присутствует лаг для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, выполненный в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа, гирокомпас. Автономный необитаемый подводный аппарат также снабжен мобильным измерителем скорости звука, судовая аппаратура управления, обработки и отображения дополнительно содержит блок данных об эфемеридной информации о навигационных спутниках Земли. Технический результат: повышение точности навигационных характеристик в сложных метеорологических и погодных условиях. 6 ил.
Система навигации автономного необитаемого подводного аппарата, включающая обеспечивающее судно, подводный автономный необитаемый подводный аппарат, комплект маяков-ответчиков, при этом обеспечивающее судно оснащено приемником спутниковой навигационной системы, системой единого времени, судовой аппаратурой управления, обработки и отображения, автономный необитаемый подводный аппарат оснащен приемопередающими блоками гидроакустической системы навигации, телеуправления и связи, навигационно-пилотажными датчиками, локальной вычислительной сетью, гидроакустическим доплеровским лагом для измерения скорости автономного необитаемого подводного аппарата относительно морского дна, лагом для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности, инерциальной навигационной системой, приемником спутниковой навигационной системы, магнитным компасом, измерителем глубины, системой управления рулевыми механизмами, а еще автономный необитаемый подводный аппарат оснащен аппаратурой для выполнения гидрологических исследований, включающей гидролокатор бокового обзора, профилограф, измерители температуры и электропроводности морской среды, фотокамеры, отличающаяся тем, что обеспечивающее судно выполнено в виде подводной лодки, снабженной приемопередающими блоками гидроакустической системы навигации, лаг для измерения скорости автономного необитаемого подводного аппарата относительно водной поверхности выполнен в виде индукционного измерителя продольной и поперечной составляющих скорости и угла дрейфа и дополнительно снабжен n приемными датчиками, расположенными в носовой и кормовой частях корпуса автономного необитаемого подводного аппарата для определения скорости погружения автономного необитаемого подводного аппарата, гирокомпас выполнен в виде корректируемого гирокомпаса, построенного на базе динамически настраиваемого гироскопа и кварцевых акселерометров, инерциальная навигационная система построена на основе прецизионного гироскопа с электростатическим подвесом ротора, автономный необитаемый подводный аппарат также снабжен мобильным измерителем скорости звука, судовая аппаратура управления, обработки и отображения дополнительно содержит блок данных об эфемеридной информации о навигационных спутниках Земли, находящихся в регионе выполняемых исследовательских работ, электронную картографическую навигационную информационную систему и видео-плоттер.
| Ваулин Ю.В., Инзарцев А.В., Матвиенко А.В., Павин A.M., Щербатюк А.Ф | |||
| Исследование работы элементов системы приведения автономного необитаемого подводного аппарата | |||
| Материалы международной научно-технической конференции «Технические проблемы освоения мирового океана» | |||
| - Владивосток, 14-17 сентября, 2005, Владивосток: Дальнаука, 2005, |

