Изобретение относится к области испытаний систем вооружения и может быть использовано для оценки помехоустойчивости оптико-электронных систем наведения высокоточного оружия, в частности телевизионных головок самонаведения (ГСП).
Известен способ (аналог) формирования изображений фоноцелевой обстановки для телевизионной ГСН управляемого боеприпаса [см., например, Гуглин В.А. Телевизионные игровые автоматы и тренажеры. - М.: Радио и связь, 1982, стр. 168-172], заключающийся в динамическом изменении изображений фоноцелевой обстановки методом трансформации с применением видеоконтрольного устройства.
Недостатком способа является отсутствие возможности имитации сближения телевизионной ГСН с целью в связи с тем, что известный способ не позволяет проводить контроль изменения масштаба цели и угловых возмущений на траектории самонаведения управляемого боеприпаса.
Известно устройство (аналог) к заявляемому решению - стенд для полунатурного моделирования системы самонаведения летательного аппарата [RU 2338992 С1, 20.11.2008], содержащий излучатель сигналов (имитатор цели) и ГСН, размещенные на неподвижном основании, а также вычислительно-моделирующее устройство, в которое входят блок моделей динамики и движения летательного аппарата, модели движения цели, модели управления движения гиростабилизированной платформой ГСН, модели расчета единичного вектора «летательный аппарат-цель». Стенд позволяет в реальном масштабе времени проводить полунатурное моделирование системы самонаведения летательного аппарата во всем диапазоне угловых скоростей перемещения цели без искажения динамики контура системы.
Недостатком известного стенда является отсутствие возможности формирования сигналов помеховой обстановки для оценки величины промаха управляемого боеприпаса в условиях воздействия преднамеренных помех.
Наиболее близким по технической сущности является способ и комплекс оценки на полунатурной модели эффективности радиоподавления радиолокационной ГСН управляемой ракеты (прототип) [RU 2695496 С1 23.07.2019]. Способ, основанный на формировании сигналов фоноцелевой и помеховой обстановки, моделировании контура наведения управляемого боеприпаса, измерении координат цели и помехи с использованием головки самонаведения и оценке величины промаха управляемого боеприпаса. Комплекс содержит последовательно соединенные блок ввода данных, головку самонаведения, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, а также устройство позиционирования, на котором размещена головка самонаведения.
Недостатком способа и комплекса является отсутствие возможности оценки помехоустойчивости телевизионной ГСН управляемого боеприпаса.
Техническим результатом данного изобретения является обеспечение возможности оценки помехоустойчивости телевизионной ГСН управляемого боеприпаса в условиях воздействия преднамеренных оптических помех.
Технический результат достигается тем, что в известном способе, основанном на формировании сигналов фоноцелевой и помеховой обстановки, моделировании контура наведения управляемого боеприпаса, измерении координат цели и помехи с использованием ГСН и оценке величины промаха управляемого боеприпаса, дополнительно преобразуют сигналы фоноцелевой и помеховой обстановки в изображение, расширяют поле зрения ГСН, имитируют динамику полета управляемого боеприпаса и кинематику сближения телевизионной ГСН с целью.
Технический результат достигается тем, что в известном устройстве, содержащем последовательно соединенные блок ввода данных, ГСН, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, а также устройство позиционирования, на котором размещена ГСН, дополнительно введены последовательно соединенные блок формирования изображения фоноцелевой и помеховой обстановки и устройство визуализации, а также оптическая система, которая размещена на устройстве позиционирования между устройством визуализации и ГСН, при этом блок формирования изображения фоноцелевой и помеховой обстановки первым и вторым входами соединен с первым выходом блока моделирования контура наведения управляемого боеприпаса и вторым выходом блока ввода данных соответственно, кроме того, блок моделирования контура наведения управляемого боеприпаса через устройство АЦП/ЦАП соединен с устройством позиционирования, при этом устройство позиционирования выполнено с возможностью угловых перемещений относительно продольной оси ГСН.
Сущность изобретения состоит:
- в переходе из радиочастотного диапазона спектра электромагнитных излучений в видимый, в котором функционирует телевизионная ГСН за счет введения блока формирования изображения фоноцелевой и помеховой обстановки, устройства визуализации;
- в расширении поля зрения телевизионной ГСН за счет введения оптической системы и размещения ее на устройстве позиционирования между устройством визуализации и ГСН;
- в имитации динамики полета управляемого боеприпаса и кинематики сближения телевизионной ГСН с целью за счет реализации функции масштабирования изображения в блоке формирования изображения фоноцелевой и помеховой обстановки и управления устройством позиционирования, которое выполнено с возможностью угловых перемещений относительно продольной оси ГСН.
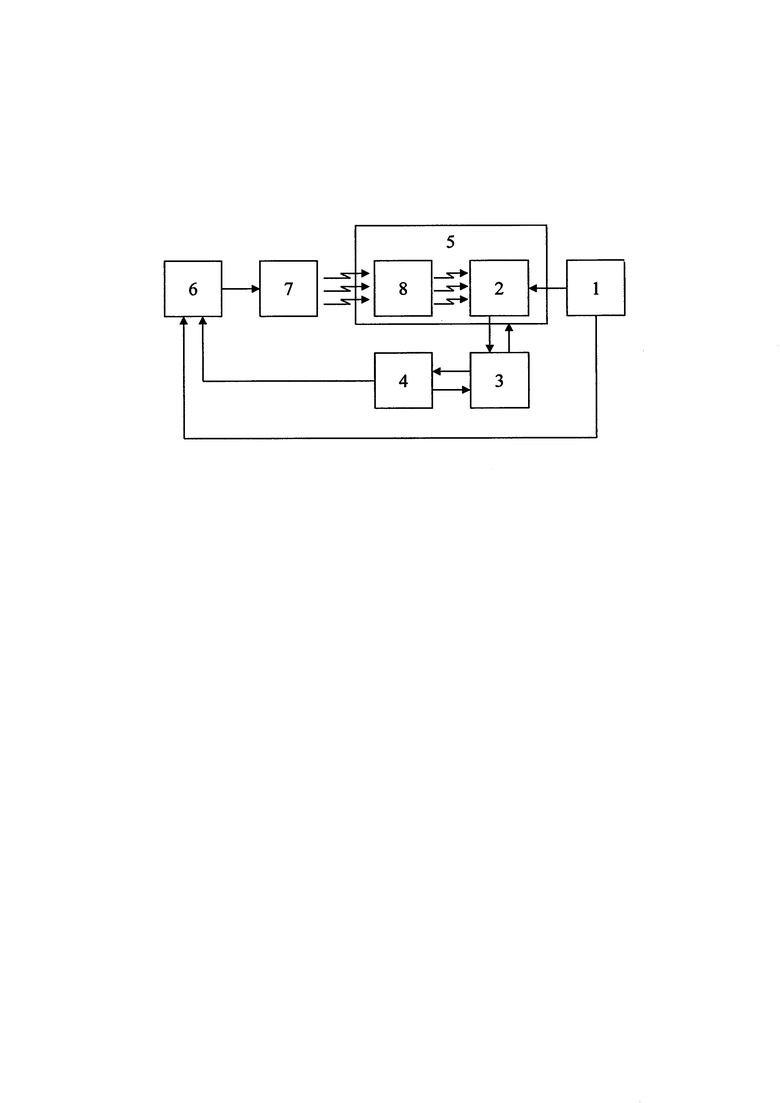
На чертеже приведена структурная схема комплекса оценки помехоустойчивости телевизионной ГСН управляемого боеприпаса, с использованием которого может быть реализован предлагаемый способ. На структурной схеме цифрами обозначены: 1 - блок ввода данных; 2 - телевизионная ГСН; 3 - устройство АЦП/ЦАП; 4 - блок моделирования контура наведения управляемого боеприпаса; 5 - устройство позиционирования; 6 - блок формирования изображения фоноцелевой и помеховой обстановки; 7 - устройство визуализации; 8 - оптическая система.
Последовательно соединены блок ввода данных 1, головка самонаведения 2, устройство АЦП/ЦАП 3, блок моделирования контура наведения управляемого боеприпаса 4, блок формирования изображения фоноцелевой и помеховой обстановки 6, устройство визуализации 7. На устройстве позиционирования 5 размещена ГСН 2 и оптическая система 8, которая расположена между устройством визуализации 7 и ГСН 2. При этом блок формирования изображения фоноцелевой и помеховой обстановки 6 первым и вторым входом соединен с первым выходом блока моделирования контура наведения управляемого боеприпаса 4 и вторым выходом блока ввода данных 1 соответственно. Кроме того, блок моделирования контура наведения управляемого боеприпаса 4 через устройство АЦП/ЦАП 3 соединен с устройством позиционирования 5, которое выполнено с возможностью угловых перемещений относительно продольной оси ГСН 2.
Назначения элементов, представленных на схеме ясны из их названия.
Блок формирования изображения фоноцелевой и помеховой обстановки 6 предназначен для преобразования информационных сигналов фоноцелевой и помеховой обстановки, поступающих с блока ввода данных 1 (выбор исходного изображения из базы данных изображений фона, цели и помехи) и блока моделирования контура наведения управляемого боеприпаса 4 (текущее значение дальности до цели), в изображение с измененным масштабом фона, цели и помехи. Блок формирования изображения фоноцелевой и помеховой обстановки 6 может быть выполнен, например, в виде устройства формирования видеосигнала, работа которого основана на использовании микроконтроллеров [RU 2027315 С1, 20.01.1995].
Устройство визуализации 7 предназначено для отображения динамично изменяющегося в реальном масштабе времени видеоизображения, поступающего с блока формирования изображения фоноцелевой и помеховой обстановки 6, имитируя сближение телевизионной ГСН с целью. Устройство визуализации 7 может быть реализовано в виде устройства отображения видеоинформации на составном жидкокристаллическом экране сверхвысокой четкости [RU 2557070 С1, 20.07.2015].
Оптическая система 8 предназначена для формирования видеоизображения и расширения поля зрения телевизионной ГСН путем перераспределения в пространстве электромагнитного поля, исходящего из устройства визуализации 7. Расширение поля зрения необходимо для того, чтобы на протяжении всего периода экспериментальной оценки все элементы фоноцелевой и помеховой обстановки находились в поле зрения телевизионной ГСН. В качестве оптической системы 8 может быть использован объектив коллиматора, формируемый на ГСН параллельный пучок лучей. С технологической и аберрационной точек зрения наиболее подходящей является выпукло-плоская линза, выпуклая поверхность которой размещена в направлении устройства визуализации 7 на дистанции фокусного расстояния (для уменьшения сферической аберрации), а плоская поверхность непосредственно перед телевизионной ГСН 2 [см., например, Андреев А.Н., Гаврилов Е.В., Ишанин Г.Г. и др. Оптические измерения. - М.: Университетская книга; Логос, 2008, стр. 103-104].
Устройство позиционирования 5 предназначено для осуществления угловых перемещений относительно продольной оси ГСН по сигналам управления (текущим значениям угла визирования цели), формируемым в блоке моделирования контура наведения управляемого боеприпаса 4. Устройство позиционирования 5 может быть выполнено, например, в виде динамического стенда, представляющего собой автоматическую поворотную (двухстепенную) платформу [RU 2263869 С1, 10.11.2005].
Работа комплекса, реализующего способ оценки помехоустойчивости телевизионной ГСН управляемого боеприпаса, не отличается от работы комплекса-прототипа за исключением того, что аналоговый сигнал с выхода телевизионной ГСН 2, характеризующий угловую скорость перемещения цели (координаты цели и помехи), преобразуется устройством АЦП/ЦАП 3 в цифровую форму и подается на вход блока моделирования контура наведения управляемого боеприпаса 4, на выходе которого определяются текущие значения дальности до цели и угла визирования цели. В блоке моделирования контура наведения управляемого боеприпаса 4 осуществляется наведение управляемого боеприпаса на цель. На каждом шаге моделирования в блоке 4 по времени рассчитываются координаты цели, помехи и боеприпаса. При этом, цифровой сигнал, характеризующий угол визирования цели, со второго выхода блока моделирования контура наведения управляемого боеприпаса 4 преобразуется устройством АЦП/ЦАП 3 в аналоговую форму и подается на вход устройства позиционирования 5 для коррекции взаимного углового положения цели, помехи и боеприпаса за счет угловых перемещений относительно продольной оси телевизионной ГСН 2.
В блоке формирования изображения фоноцелевой и помеховой обстановки 6 имеется база данных изображений фона, цели и помехи, полученных путем записи в полевых условиях результатов применения реального средства создания преднамеренных помех, либо синтезированных методами компьютерной графики. В блоке формирования изображения фоноцелевой и помеховой обстановки 6 выполняются выбор исходного изображения из базы данных изображений фона, цели, помехи и масштабные преобразования в соответствии с данными о варианте формирования изображения и текущих значениях дальности до цели, поступающими на его второй и первый вход со второго выхода блока ввода данных 1 и с первого выхода блока моделирования контура наведения управляемого боеприпаса 4 соответственно. По преобразованным таким образом и выведенным на устройство визуализации 7 изображениям работает телевизионная ГСН 2, реализуя замыкание контура наведения управляемого боеприпаса и имитацию сближения ГСН с целью. Непосредственно перед входом телевизионной ГСН 2 размещена оптическая система 8, обеспечивающая расширение поля зрения телевизионной ГСН 2 и передачу изображений фоноцелевой и помеховой обстановки в видимом диапазоне длин волн от устройства визуализации 7 на приемное устройство телевизионной ГСН 2, что достигается путем соосного размещения устройства визуализации 7, оптической системы 8 и телевизионной ГСН 2, а также удаления оптической системы 8 от устройства визуализации 7 на расстояние, равное фокусному расстоянию этой оптической системы 8.
При завершении имитации динамики полета управляемого боеприпаса и кинематики сближения телевизионной ГСН 2 с целью, когда текущее значение дальности до цели меньше заданного, в блоке моделирования контура наведения управляемого боеприпаса 4 осуществляется оценка величины промаха управляемого боеприпаса относительно начальной точки прицеливания в условиях воздействия преднамеренных помех и определяется помехоустойчивость испытываемой телевизионной ГСН управляемого боеприпаса. Этим достигается указанный в изобретении технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕПЛОВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2740434C1 |
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ПОЛУАКТИВНОЙ ЛАЗЕРНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2753592C1 |
| СПОСОБ ИСПЫТАНИЙ СИСТЕМ ЗАЩИТЫ ОБЪЕКТОВ ОТ ПОРАЖЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2016 |
|
RU2645006C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| Способ поражения военной техники управляемыми боеприпасами | 2019 |
|
RU2722709C1 |
| Способ формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными ГСН, включающий комплекс известных устройств для его осуществления и визуализации | 2019 |
|
RU2726026C1 |
| Малогабаритная зенитная управляемая ракета | 2018 |
|
RU2694932C1 |
| Мобильный комплекс обеспечения испытаний и оценки эффективности функционирования систем защиты объектов от поражения высокоточным оружием | 2016 |
|
RU2628303C1 |
| ПАССИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2020 |
|
RU2761915C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ УПРАВЛЯЕМЫМ БОЕПРИПАСОМ В СЛОЖНОЙ ФОНОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2019 |
|
RU2719891C1 |
Изобретение относится к области испытаний систем вооружения и может быть использовано для оценки помехоустойчивости оптико-электронных систем наведения высокоточного оружия, в частности телевизионных головок самонаведения. Сущность способа заключается в преобразовании информационных сигналов фоноцелевой и помеховой обстановки в видеоизображение, расширении поля зрения телевизионной головки самонаведения, имитации динамики полета управляемого боеприпаса и кинематики сближения телевизионной головки самонаведения с целью для оценки величины промаха управляемого боеприпаса. Комплекс оценки помехоустойчивости телевизионной головки самонаведения управляемого боеприпаса содержит дополнительно введенные последовательно соединенные блок формирования изображения фоноцелевой и помеховой обстановки и устройство визуализации, а также оптическую систему, которая размещена на устройстве позиционирования между устройством визуализации и головкой самонаведения. При этом блок формирования изображения фоноцелевой и помеховой обстановки первым и вторым входами соединен с первым выходом блока моделирования контура наведения управляемого боеприпаса и вторым выходом блока ввода данных соответственно. Кроме того, блок моделирования контура наведения управляемого боеприпаса через устройство АЦП/ЦАП соединен с устройством позиционирования. При этом устройство позиционирования выполнено с возможностью угловых перемещений относительно продольной оси головки самонаведения. Технический результат - обеспечение возможности оценки помехоустойчивости телевизионной ГСН управляемого боеприпаса в условиях воздействия преднамеренных оптических помех. 2 н.п. ф-лы, 1 ил.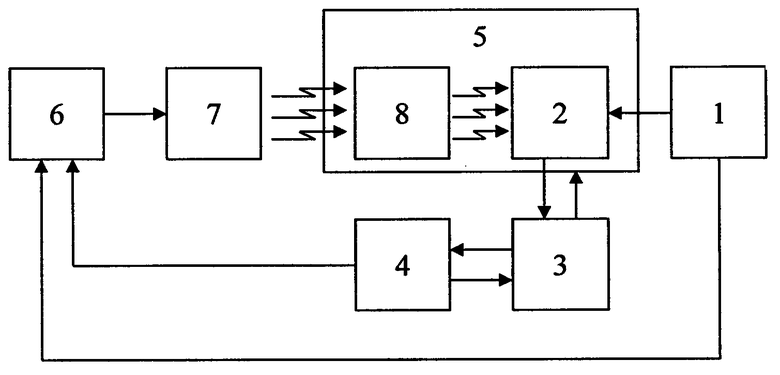
1. Способ оценки помехоустойчивости телевизионной головки самонаведения управляемого боеприпаса, основанный на формировании сигналов фоноцелевой и помеховой обстановки, моделировании контура наведения управляемого боеприпаса, измерении координат цели и помехи с использованием головки самонаведения и оценке величины промаха управляемого боеприпаса, отличающийся тем, что дополнительно преобразуют сигналы фоноцелевой и помеховой обстановки в изображение, расширяют поле зрения головки самонаведения, имитируют динамику полета управляемого боеприпаса и кинематику сближения телевизионной головки самонаведения с целью.
2. Комплекс оценки помехоустойчивости телевизионной головки самонаведения управляемого боеприпаса, содержащий последовательно соединенные блок ввода данных, головку самонаведения, устройство АЦП/ЦАП, блок моделирования контура наведения управляемого боеприпаса, а также устройство позиционирования, на котором размещена головка самонаведения, отличающийся тем, что дополнительно введены последовательно соединенные блок формирования изображения фоноцелевой и помеховой обстановки и устройство визуализации, а также оптическая система, которая размещена на устройстве позиционирования между устройством визуализации и головкой самонаведения, при этом блок формирования изображения фоноцелевой и помеховой обстановки первым и вторым входами соединен с первым выходом блока моделирования контура наведения управляемого боеприпаса и вторым выходом блока ввода данных соответственно, кроме того, блок моделирования контура наведения управляемого боеприпаса через устройство АЦП/ЦАП соединен с устройством позиционирования, при этом устройство позиционирования выполнено с возможностью угловых перемещений относительно продольной оси головки самонаведения.
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| БУТУЗОВ В.В., ДОНЦОВ А.А., КОЗИРАЦКИЙ Ю.Л | |||
| "МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИНФОРМАЦИОННОЙ ПОДСИСТЕМЫ МНОГОФУНКЦИОНАЛЬНОГО ИНТЕГРИРОВАННОГО КОМПЛЕКСА ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ", Материалы Международной научно-технической конференции, 2-6 декабря 2013 г., МОСКВА INTERMATIC - 2013, часть 5, МИРЭА, С.132-135 | |||
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722711C1 |

