Изобретение относится к области бронетанкового вооружения (БТВ) и может быть использовано для автоматизации процессов проведения внешнего целеуказания и индикации целей, а также важных объектов на танках, боевых машинах пехоты и десанта, бронетранспортёрах, артиллерийских системах и наземных роботизированных, в том числе автономных и дистанционно управляемых разведывательно-ударных комплексах военного назначения, и т.п. Изобретение рассчитано прежде всего на современные образцы БТВ с системами управления огнём, оснащёнными электронно-вычислительными машинами и прицелами с цифровыми оптико-электронными каналами.
Модернизация и разработка новых образцов БТВ неминуемо связаны с появлением новых, более совершенных, развитых, высокоавтоматизированных систем управления огнём, эффективность которых определяется в том числе и тем, сколько времени тратится на разведку, обнаружение целей и подготовку выстрелов. В свою очередь время на данные этапы подготовки к огневому воздействию в значительной степени определяется применяемым способом целеуказания.
Можно разделить способы внутреннего и внешнего целеуказания. Под способами внутреннего целеуказания понимается процессы получения, обработки и передачи информации о целях и важных объектах в системе «обнаруживший-стреляющий», когда обнаруживший и стреляющий являются членами одного экипажа. Способы внешнего целеуказания (ВЦУ) наоборот характеризуются тем, что информация о целях и важных объектах поступает извне, от другого образца БТВ, например, командирской боевой машины (БМ), а также системы разведки, системы управления боем и т.д., и т.п.
В настоящее время существующими способами ВЦУ, применяемыми на образцах БТВ, являются «контрастно-визуальный», «контрастно-лучевой», «ориентирный» и «координатный» способы.
При проведении ВЦУ «контрастно-визуальным» способом, местоположение цели на местности указывают трассерами, разрывами снарядов, а также при помощи реактивных сигнальных патронов и т.п. («Огневая подготовка мотострелковых подразделений» г. Москва, МО РФ, ГУ БП СВ; «Учебник сержанта ВДВ», кн. 2, стр. 515-525).
Достоинством данного способа является то, что за счёт визуальных эффектов (трассерные следы, разрывы и т.п.) значительно может быть сокращено время на поиск целей в полях зрения приборов наблюдения и прицелов экипажем образца БТВ.
Вместе с тем проведение ВЦУ «контрастно-визуальным» способом может быть эффективным только в условиях относительно простой фоноцелевой обстановки. В условиях же активного боя, когда по противнику ведут огонь различные средства, то большое количество разрывов снарядов и трассеров дезориентирует экипажи танков. Кроме того, танковые приборы наблюдения имеют ограниченное поле зрения, и экипаж может воспринять ВЦУ, если разрывы снарядов или трассеры окажутся в поле зрения его приборов. Ещё одним недостатком данного способа является отсутствие возможности скрытного проведения целеуказание. Кроме этого необходим прямой визуальный контакт образца БТВ с целью или важным объектом, так как невозможно указать цель, которая скрыта за лесом, зданиями и т.п. Данный способ обладает низкой пропускной способностью и практически непригоден к автоматизации.
«Контрастно-лучевой» способ целеуказания заключается в подсветке цели одним из видов излучения, например, электромагнитным, в частности лазером, светом, радиолокационным сигналом и т.п. При этом на борту объекта должна быть аппаратура, обеспечивающая приём отражённого сигнала от целей, и определения направлений на них. К данному способу целеуказания можно отнести применение прожекторов в период Великой отечественной войны для подсветки авиации противника в ночном небе. В настоящее время целеуказание«контрастно-лучевым» способом применяется в основном в системах наведения управляемого оружия, например, для наведения ракет в зенитно-ракетных комплексах с помощью РЛС (Радиоэлектронные системы: основы построения и теория. Справочник /Ширман Я.Д., Москвитин С.В., Горшков С.А., Леховицкий Д.И., Левченко Л.С./ под ред. Я.Д. Ширмана. - М.: ЗАО «МАКВИС», 1998. С.81-88) или с помощью лазерных дальномеров-целеуказателейв артиллерии(Оружие и технологии России: Энциклопедия. XXI век. Москва: Научно-техническое издание, 2005. С. 325-328).
Самый главный недостаток данного способа заключается в том, что он является «активным», т.е. облучаемый объект, может с помощью соответствующей аппаратуры засечь подсветку и принять меры по противодействию. Кроме этого, система, которая отвечает за «подсветку» цели должна работать в связке с объектом, который должен эту цель поражать. Это затрудняет применение единой системы управления боем тактического подразделения, в том числе для автоматического распределения целей между БМ.
Сущность «ориентирного» способа заключается в определении направления на цель или важный объект относительно БМ («Огневая подготовка мотострелковых подразделений» г. Москва, МО РФ, ГУ БП СВ; «Учебник сержанта ВДВ», кн. 2, стр. 515-525). При этом направление на цель или важный объект задают от хорошо заметных ориентиров на местности, по часам, а также от направления движения БМ(например, по азимутальному указателю) и т.п. Как правило для осуществления данного способа команды целеуказания передают голосом по радиоканалу.
Недостатками «ориентирного» способа ВЦУ являются:
низкая пропускная способность канала передачи информации в связи с подачей команд голосом по средствам связи;
необходимость прямого визуального контакта с целью или важным объектом;
зависимость временных затрат на приём целеуказания от обученности и выучки экипажаБМ;
необходимость после проведения ВЦУ на каждую цель или важный объект осуществления их поискаи обнаружения в полях зрения прицелов членами экипажа, в частности командиром БМи затем наводчиком.
Из уровня техники известен способ управления огнём бронетанковой техники (Патент RU 2603750 C2, F41G 3/00, 2014 г.), который можно рассматривать в качестве аналога, как более совершенную версию «ориентирного» способа. Сущность данного способа заключается в согласовании линии визирования прицела наводчика с линией визирования прибора целеуказания командира взвода (роты) в момент выполнения целеуказания. Отличается способ тем, что позволяет осуществлять целеуказание нескольким объектам бронетанковой техники «наведением прибора в цель», но при нахождении должностного лица (командира взвода, роты), дающего целеуказание, вне бронеобъекта.
Вместе с этим, этот способ целеуказания позволяет получать ВЦУ только от должностного лица (управляющего огнём). Единовременно позволяет давать целеуказание одному образцу БТВ только на одну цель. В случае выявления новых целей другими БМ и/или средствами разведки осуществить передачу (или распределение) целеуказания между собой или передачу целей управляющему огнём данный способ не позволяет. Кроме этого, к недостаткам данного способа можно отнести необходимость прямого визуального контакта должностного лица (управляющего огнём) с целью, и потери времени на поиск целей в полях зрения прицелов, даже с учётом того, что способ при реализации позволит автоматически сориентировать поля зрения прицелов в сторону указанной цели. ВЦУ данным способом не может быть проведено системно, когда для множества разведанных целей осуществляется одновременное распределение огня для различных средств поражения, в частности образцов БТВ, на поле боя.
При проведении ВЦУ «координатным» способом, данные о целях указываются экипажу образца БТВ непосредственно на карте боевых действий. Как правило ВЦУ данным способом проводится заблаговременно перед началом боевых действий («Огневая подготовка мотострелковых подразделений» г. Москва, МО РФ, ГУ БП СВ; «Учебник сержанта ВДВ», кн. 2, стр. 515-525). Что в меняющейся тактической обстановке на поле боя делает его малоэффективным.
Однако применение современных вычислительных средств обработки, передачи и отображения информации позволяет проводить ВЦУ«координатным» способом по защищённым каналам связи в режиме реального времени непосредственно во время активных боевых действий. Так вся фоноцелевая обстановка может отображаться на графическом планшете. Там же может отображаться навигационная информация, а также информация о своих подразделениях и задаче боя. Данный способ наиболее совершенен по сравнению с аналогами, может быть осуществлён скрытно, за счёт применения защищённых каналов связи. Обладает высокой пропускной способностью. Экипаж БМ может принимать информацию по целям с графического планшета, так и указывать обнаруженные цели на графическом планшете для дальнейших передачи и отображения данных в системе ВЦУ подразделения и т.п.
Наиболее современной системой управления с применением вычислительных средств обработки, передачи и отображения информации в функционал которой в том числе входит проведение ВЦУ «координатным» способом является единая система управления тактическим звеном (ЕСУ ТЗ) [Найдено в Интернет: https://ru.wikipedia.org/w/index.php?title=ЕСУ_ТЗ&oldid=95873490]. Таким образом реализация «координатного» способа ВЦУ, предусматривающая приём информации извне от других объектов, системы управления или разведки и т.п. и вывод информации о местоположении целей и важных объектах в реальном масштабе времени на экран (дисплей) графического планшета (отображения навигационной и тактической информации)образца БТВ выбрана в качестве прототипа заявленного способа.
Недостатком данного способа является необходимость проведения визуального поиска и обнаружения каждой цели и важного объекта через прицелы и приборы наблюдения образца БТВ. При чём, если на знакомой местности и при сравнительно невысокой интенсивности боя у экипажа на каждую цель может уходить от единиц до десятка секунд, при условии, что цель имеет чёткий контраст с местностью, то в сложной фоноцелевой обстановке на незнакомой местности при интенсивном бое на каждую цель может тратиться время, измеряемое минутами. Заметим ещё один недостаток, заключающийся в том, что даже с учётом автоматической передачи информации по цели и «подсвечиванием» её положения на цифровой карте графического планшета, время поиска и обнаружения цели для дальнейшего её поражения зависит от субъективных качеств, слаженности и подготовки членов экипажа БМ. При этом если оператор, например, командир образца БТВ, неправильно сориентируется на местности, то достаточно высока вероятность допущения ошибки при выборе «подсвеченной» цели для поражения.
Таким образом основная задача, на решение которой направлен заявленный способ, заключается в обеспечении многоцелевого и точного ВЦУ в реальном масштабе времени как по находящимся в зоне прямой видимости, так и за её пределами и укрытиями объектам при минимальной зависимости результата целеуказания от сложности фоноцелевой обстановки, интенсивности боя, а также качеств и подготовки экипажа БМ.
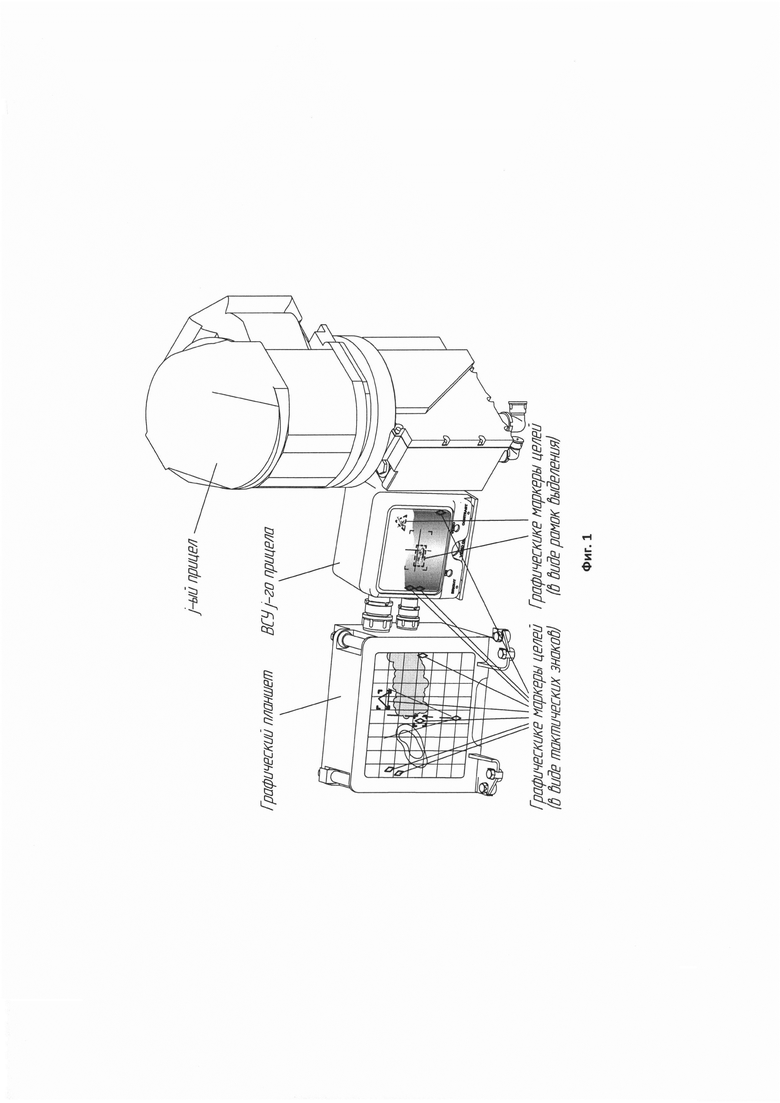
Решение данной задачи определяется осуществлением такого целеуказания «координатным» способом, при котором все цели и важные объекты будут кроме цифровой карты графического планшета (отображения навигационной и тактической информации) ещё дополнительно выделяться непосредственно в полях зрения (на экранах видео-смотровых устройств (ВСУ)) прицелов и приборов наблюдения образцов БТВ. Тем самым будут минимизированы области поиска целей и важных объектов оператором на изображениях прицелов и приборов наблюдения. Пример такого выделения показан на чертеже (фиг. 1), где представлен вариант внешнего вида некоторого j-го прицела, его ВСУ и графического планшета (отображения тактической и навигационной информации). Иллюстрируется отображение фоноцелевой обстановки на цифровой карте планшета, отображение графических маркеров выделения целей и важных объектов на экране ВСУ. При этом если цели или важные объекты находятся за пределами поля зрения прицела, то информация о них может выводиться по краям изображения ВСУ в уменьшенном виде, например, в виде тактических знаков.
Основными техническими результатами, обеспечиваемыми приведённой совокупностью признаков, являются:
значительное сокращение времени на поиск и обнаружение целей через прицелы и приборы наблюдения образца БТВ при приёме ВЦУ;
сокращение времени на передачу ВЦУ на другие объекты или/и систему управления боем и т.п.;
возможность указывать непосредственно в полях зрения прицелов и приборов наблюдения не только цели, но и прочие важные объекты, а также районы сосредоточения, районы развёртывания колонн, места нахождения пунктов управления и прочую тактическую информацию;
возможность проведения ВЦУ целей и важных объектов, которые находятся за пределами визуальной видимости, что позволяет проводить целеуказание до выхода подразделения БТВ на огневой рубеж, и соответственно заранее перегруппироваться согласно целевой обстановке, осуществлять целераспределение и заряжание согласно типам поражаемых целей, а при выходе на поле боя не тратить «драгоценное» время на поиск и обнаружение целей, а сразу приступать к их поражению.
Дополнительным результатом можно указать простоту и наглядность приёма и передачи целеуказания для членов экипажа образца БТВ, что снижает требования к их уровню обученности. А также то, что вывод необходимой тактической информации непосредственно в поле зрение прицела (экран ВСУ) может существенно помогать командирам БМ лучше ориентироваться на незнакомой местности.
Прицелы современных образцов бронетанкового вооружения как правило имеют оптико-электронную часть, предназначенную для преобразования невидимого для человеческого глаза излучения в электрический сигнал, на основании которого затем формируется видимое для оператора изображение. На сегодняшний день в составе прицелов бронетанкового вооружения наиболее распространены тепловизионные оптико-электронные части (тепловизоры), также активно применяются приборы ночного видения и телевизионные камеры.
При этом независимо от спектрального диапазона, в котором работает прицел, любая его оптико-электронная часть имеет объектив, предназначенный для формирования резкого изображения и фотоприёмное устройство (ФПУ) для преобразования излучения в электрический сигнал. В современном исполнении роль ФПУ как правило выполняют фото-матрицы, например, ПЗС, ПЗИ, или болометрические.
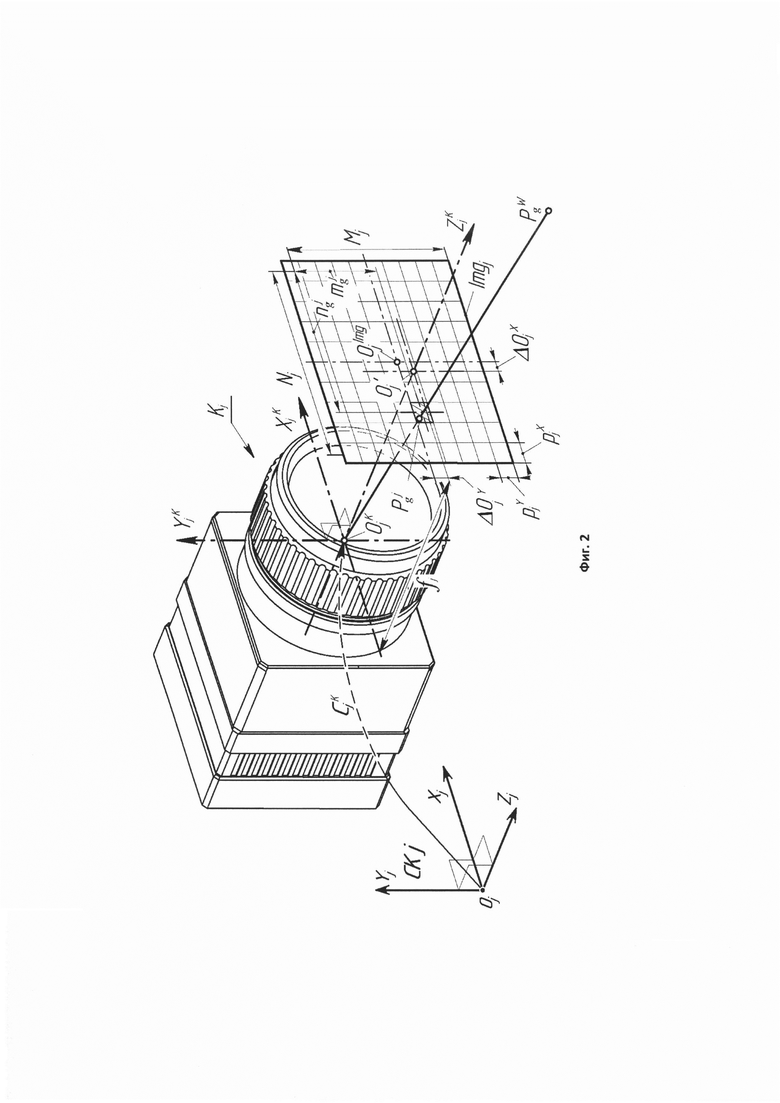
Это позволяет оптико-электронную часть любого прицела рассматривать как некоторую видеокамеру (Фиг. 2) Kj, где j - индекс, указывающий на принадлежность к соответствующему прицелу, например, j=К для прицела командира (ПК), j=Н для прицела наводчика (ПН) или j=КН для прицела-дублёра наводчика (ПДН) КНД и т.д., в которой получаемое с неё цифровое изображение Imgj может быть отождествлено с реальным физическим изображением, сфокусированным её объективом в задней фокальной плоскости на ФПУ.
Цифровые изображения Imgj получаемые с камер прицелов, состоят из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения. В полутоновых изображениях значение пикселя представляет собой одну величину, которая характеризует яркость пикселя. Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения чёрного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов. В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB – красный, зелёный, синий) должны быть отдельно определены красная, зелёная и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зелёного и синего цветов), которые можно воссоединять при отображении или при обработке.
Под СК камеры Kj понимают СК 





При этом размеры пикселей изображения Imgj (Фиг. 2) принимают равными в соответственно в горизонтальной и вертикальной плоскостях физическим размерам 




В случае допущения погрешностей при производстве оптико-электронной части прицела (камеры), при которых ФПУ может своим геометрическим центром не совпадать с оптической осью объектива камеры (Фиг. 2), различают следующие величины 





Если в поле зрения камеры j-го прицела камеры находится объект 



Прицелы, применяемые на образцах бронетанкового вооружения, как правило, применяются модульной или перископической конструкции.
В прицелах модульной конструкции камера располагается в надброневом пространстве БМ в головном блоке прицела. Изменение поля зрения, а также стабилизация в них реализуется за счёт приводов самой камеры или всего блока целиком.
Классическая конструкция перископического прицела с оптико-электронным каналом предполагает размещение камеры таким образом, чтобы оптическая ось её объектива была направлена снизу-вверх на качающееся головное зеркало (ГЗ) прицела. ГЗ располагается внутри головного блока прицела в надброневом пространстве. Камера располагается под углом (как правило 45°) к плоскости зеркала в заброневом пространстве образца вооружения.
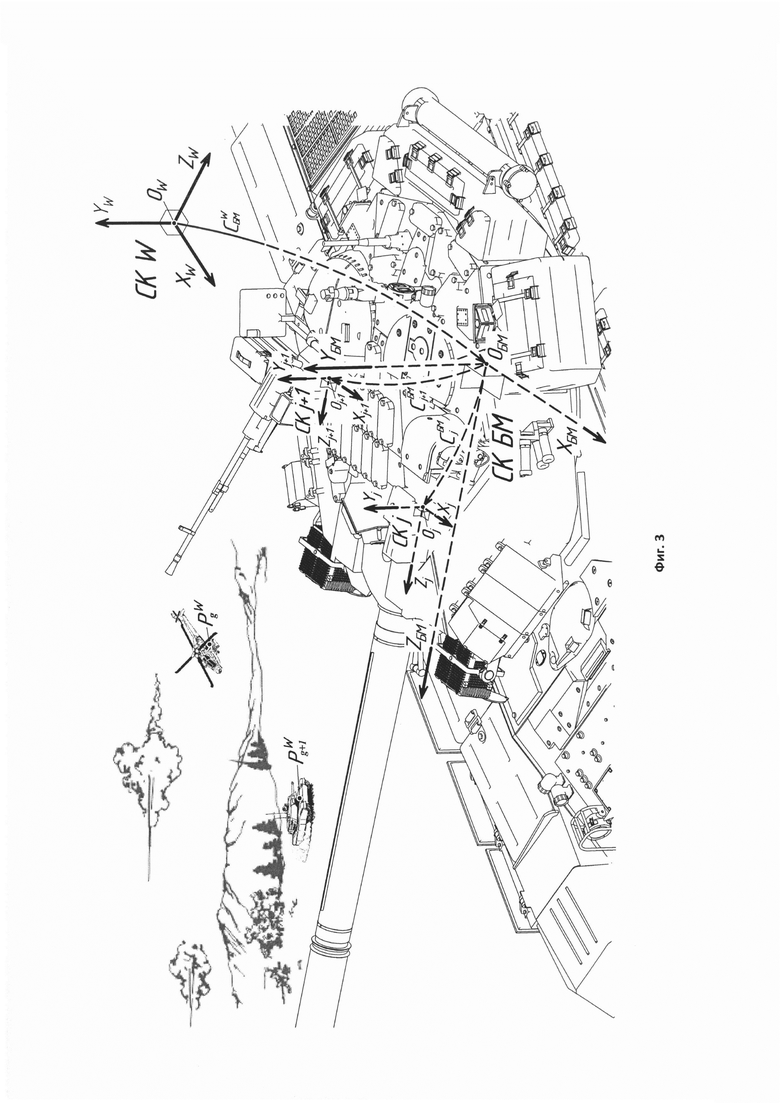
Под СК j-го прицела (Фиг. 2, Фиг. 3), понимается СК 
Для описания положения камеры Kjв j-ом прицеле может применена матрица положения(эвклидово преобразование) 
где 

Положение каждого прицела также может быть описано соответствующими матрицами положения 
В целом значения 

СК БМ 

















Обрабатывающая система, являющаяся, например, удалённым компьютером, таким как ноутбук или персональный компьютер (рабочая станция), должна обеспечивать выбор пользователем изображений и/или ввод команд обработки, приём изображений с камер Kj, дальнейшую их автоматическую обработку с вычислением положения графических маркеров на цифровой карте местности графического планшета(отображения навигационной и тактической информации) и в полях зрения прицелов, а также выработку соответствующих сигналов наведения для каналов вертикального и горизонтального наведения (ВН и ГН) стабилизатора вооружения и сигналов управления для наведения центральной прицельной марки (ЦПМ) прицелов на цели. Кроме этого должна обеспечивать приём и обработку сигналов с навигационной системы, датчиков углов прицелов, датчиков курса, крена и тангажа, а также с датчика компаса, а также приём и передачу сигналов с информацией о координатах целей на приёмно-передающею аппаратуру.
Обрабатывающая система может быть выполнена как отдельное (съёмное) оборудование для ВЦУ, а также может быть встроена в СУО или комплекс вооружения и являться, например, частью прицельно-наблюдательного комплекса СУО образца БТВ. Обрабатывающая система должна содержать исполняемые модули или команды с возможностью выполнения по меньшей мере одним процессором, память для хранения данных, пользовательский интерфейс, содержащий один несколько дисплеев, таких как жидкокристаллические мониторы для просмотра видеоданных и устройство управления и ввода данных, такое как клавиатура или указательное устройство (например, манипулятор типа «мышь», шаровой указатель, стилус, сенсорная панель или другое устройство), для обеспечения взаимодействия пользователя (оператора) с видеоданными. В качестве дисплеев также могут использоваться ВСУ прицела и графический планшет отображения навигационной и тактической информации образца БТВ. Введение сигналов управления с обрабатывающей системы в приводы ВН и ГН стабилизатора вооружения СУО может быть реализовано путём подачи этих сигналов в блок управления стабилизатора вооружения или непосредственно в цепи пультов управления наводчика или командира в режиме дублирования.
Сущность изобретения поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения, на которых:
на фиг. 1 иллюстрируется вариант внешнего вида прицела, графического планшета и ВСУ прицела, с отображаемыми фоноцелевой обстановкой на цифровой карте планшета, графических маркеров выделения целей и важных объектов на экранах ВСУ и графического планшета;
на фиг. 2 показано взаимное положение СК камеры j-го прицела относительно его основания и размещение снимаемого с камеры цифрового изображения, а также иллюстрируется взаимосвязь между положением объекта во внешней СК и его цифровым изображением в пиксельной СК;
на фиг. 3 иллюстрируется взаимосвязь и вариант размещения СК j-ых прицелов с СК БМ и внешней (мировой) CKW, в которой определены координаты цели;
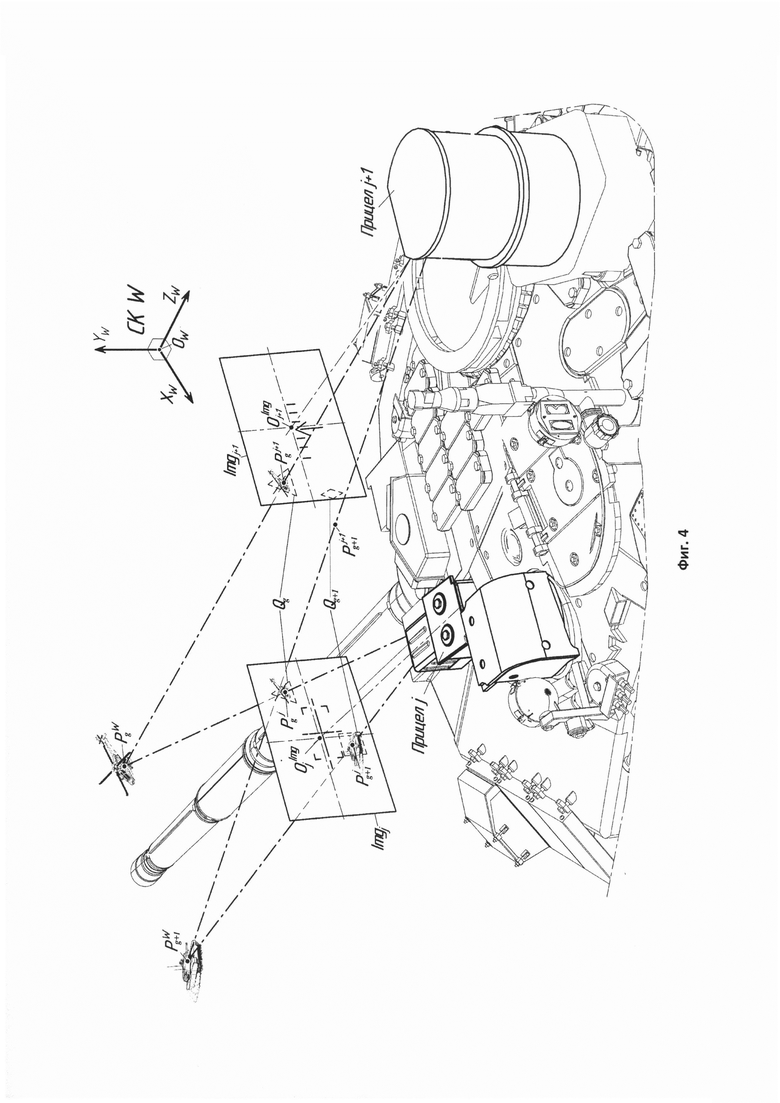
на фиг. 4 иллюстрируется сущность преобразований и взаимосвязь между целями и их положением на изображениях камер j-ых прицелов;
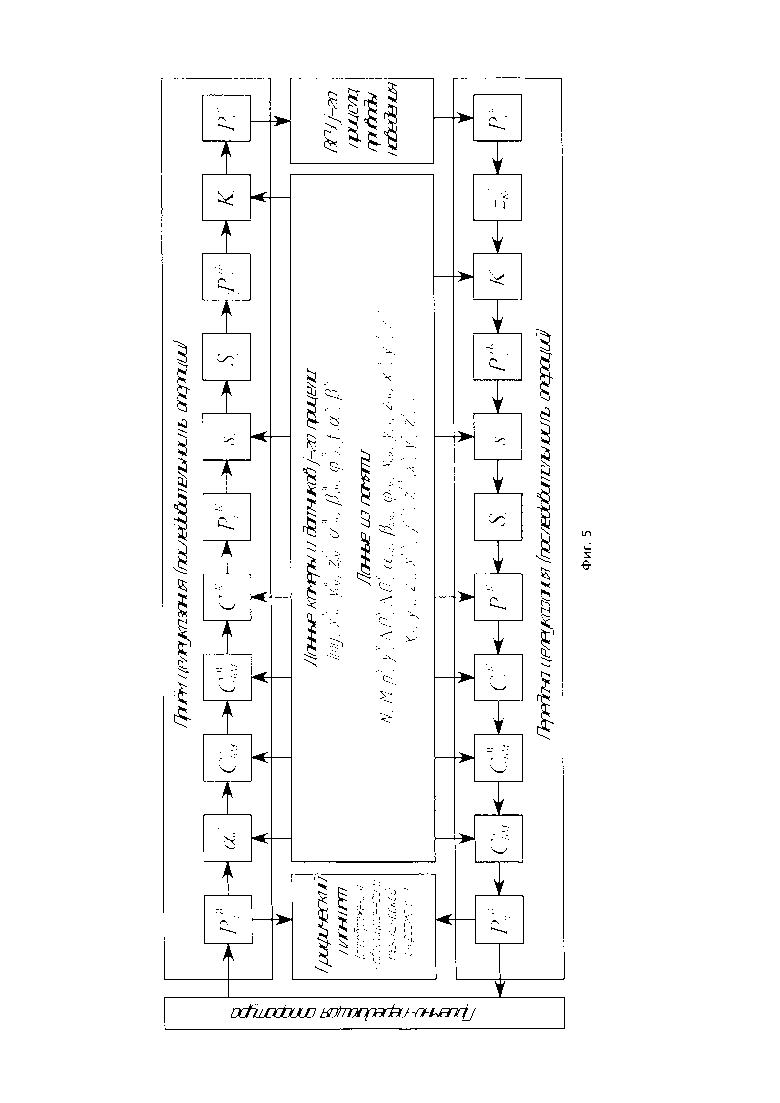
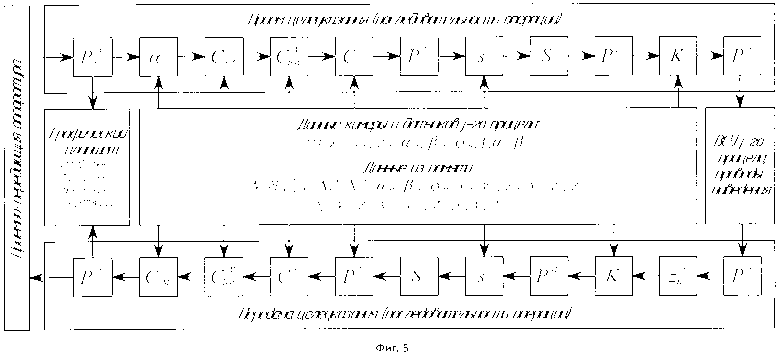
на фиг. 5 проиллюстрирована последовательность обработки информации заявленным способом при приёме и передаче целеуказания.
Осуществляют заявленный способ следующим образом(фиг. 5).
Принимают с камер (оптико-электронных частей)j-ых прицелов, например, камер прицела командира и прицела наводчика, цифровые изображения Imgj.
Принимают с навигационной системы БМ данные, содержащие трёхмерные координаты (


С датчика компаса принимают данные (угол 

С датчиков, курса, тангажа и крена и БМ принимают данные, содержащие значения углов (соответственно, 


С датчиков прицелов принимают данные о действующих значениях фокусных расстояний fj объективов камер j-ых прицелов БМ, данных датчиков угла об ориентации головных блоков прицелов (если прицелы имеют модульную конструкцию) или рам головных зеркал (если прицелы имеют перископическую конструкцию) в горизонтальной плоскости 

Из памяти обрабатывающей системы принимают данные о внутренних параметрах камер j-ых прицелов, а именно значения горизонтальных и вертикальных разрешений фотоприёмных устройств в горизонтальной Nj и вертикальной Mj плоскостях, расстояние между геометрическим центрами фотоприёмных устройств и центрами изображений, формируемых объективами камер j-ых прицелов в горизонтальной 



При приёме целеуказания принимают от внешнего источника (другой БМ подразделения, например, командирской, или системы управления звеном, системы или средства разведки) данные о целеуказании, содержащие, по крайней мере, трёхмерные координаты (


Для всехпринятых g-ых целей и важных объектов записывают векторы

Согласно данным по целеуказанию наносят соответствующие графические маркеры (тактические знаки) на цифровую карту местности графического планшета(отображения навигационной и тактической информации).
Вычисляют углы 
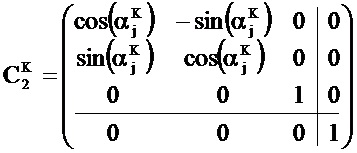
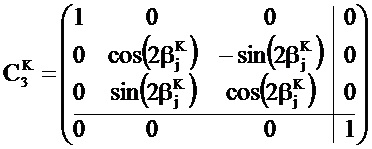
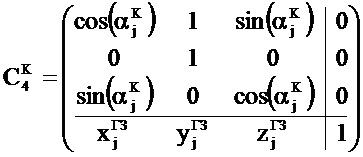
Для каждого j-го прицела, для которого может быть проведено целеуказание, вычисляют матрицы 
где 







Вычисляют матрицу 
где 







Для каждой камеры (оптико-электронной части) j-го прицела рассчитывают матрицу положения 
При этом в общем случае матрица положения 


При этом для вычисления всех коэффициентов матриц 
Так, например, если прицел имеетмодульную конструкцию, предусматривающую неподвижное размещение камеры внутри головного блока прицела размещённого в свою очередь на кардановых подвесах и стабилизированного в двух плоскостях с углами прокачки в вертикальной и горизонтальной плоскости, соответственно 

где 








Если прицел имеетперископическую конструкцию, предусматривающую неподвижное размещение камеры внутри прицела, и изменение ориентации поля зрения прицела за счёт прокачки ГЗ в вертикальной и горизонтальной плоскостях на углы 

где 







Вычисляют вектор 

Масштабируют координаты g-ой цели или важного объекта в СК 
рассчитывают коэффициент проекции sj

составляют проекционную матрицу Sj
пересчитывают значения координат вектора 

Вычисляют матрицы внутренних параметров Kj камер (оптико-электронных частей) j-ых прицелов
Для каждой g-ой цели или важного объекта и j-го прицела вычисляют вектор 



где 
Для каждой g-ой цели или важного объекта отображают на изображениях Imgj ВСУ j-го прицелов соответствующий типу цели графический маркер Qq, например, в форме рамки, выделяющей местоположение изображения цели в поле зрения j-го прицела, как показано на чертежах (Фиг. 1, Фиг. 4).При этом если пиксельные координаты g-ой цели или важного объекта выходят за границы изображения Imgj, т.е. 
При принятии решения о наведения вооружения на g-ую цель подают команды наведения на привод ГН стабилизатора вооружения до момента отработки угла 
При передаче целеуказания (Фиг. 5) обнаруженные цели или важные объекты указывают на экране ВСУ j-го прицела, например, путём наведения ЦПМ на цель или объект и подаче команды на передачу цели, или путём нажатия на область экрана ВСУ где находится цель или объект, если ВСУ имеет сенсорный дисплей, в любом случае по номеру столбца 

Измеряют дальность 
Преобразуют вектор 

Масштабируют координаты вектора 




Преобразуют координаты цели из СК 

Одновременно отображают соответствующие графические маркеры Qq (тактические знаки) на цифровую карту местности графического планшета(отображения навигационной и тактической информации) и передают вектор 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНУТРЕННЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2712367C2 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола | 2020 |
|
RU2725677C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| СПОСОБ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ ЗЕНИТНО-РАКЕТНОГО ВООРУЖЕНИЯ СО СРЕДСТВАМИ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ | 2023 |
|
RU2830505C1 |
| Способ определения положения области поиска соответствий на дисторсионно-искажённых изображениях | 2020 |
|
RU2740435C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ИХ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ | 2018 |
|
RU2697822C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПАРАМЕТРОВ СТАБИЛИЗАТОРА ВООРУЖЕНИЯ | 2017 |
|
RU2667664C1 |
Изобретение относится к области бронетанкового вооружения (БТВ) и может быть использовано для автоматизации процессов проведения внешнего целеуказания, индикации целей и важных объектов непосредственно в полях зрения (на экранах видео-смотровых устройств (ВСУ)) прицелов и приборов наблюдения с цифровыми оптико-электронными каналами образцов БТВ. При внешнем целеуказании с индикацией осуществляют приём информации извне от других объектов (другой боевой машины подразделения звена, например командирской, или системы управления звеном, системы или средства разведки, системы управления или разведки и т.п.) и выводят информацию о местоположении целей и важных объектов в реальном масштабе времени на экран планшета, отображающего навигационную и тактическую информацию. Принимаемые данные целеуказания содержат по крайней мере трёхмерные координаты (

























Способ внешнего целеуказания с индикацией целей для образцов бронетанкового вооружения, заключающийся в приёме информации извне от других объектов - другой боевой машины подразделения звена, например командирской, или системы управления звеном, системы или средства разведки, системы управления или разведки и т.п. и выводе информации о местоположении целей и важных объектах в реальном масштабе времени на экран - дисплей графического планшета отображения навигационной и тактической информации образца бронетанкового вооружения, отличающийся тем, что при приёме целеуказания принимают от внешнего источника - другой боевой машины подразделения, например командирской, или системы управления звеном, системы или средства разведки данные о целеуказании, содержащие, по крайней мере, трёхмерные координаты (




для каждого j-го прицела, для которого может быть проведено целеуказание, вычисляют матрицы 
где 







вычисляют матрицу 
где 







для каждой камеры оптико-электронной части j-го прицела рассчитывают матрицу положения 
при этом в общем случае матрицу положения 





где 










где 








масштабируют координаты g-й цели или важного объекта в СК 
рассчитывают коэффициент проекции sj

составляют проекционную матрицу Sj
пересчитывают значения координат вектора 

вычисляют матрицы внутренних параметров Kj камер - оптико-электронных частей j-х прицелов
для каждой g-й цели или важного объекта и j-го прицела вычисляют вектор 



где 
для каждой g-й цели или важного объекта отображают на изображениях Imgj ВСУ j-х прицелов соответствующий типу цели графический маркер Qq, например, в форме рамки, выделяющей местоположение изображения цели в поле зрения j-го прицела, как показано на чертежах, при этом если пиксельные координаты g-й цели или важного объекта выходят за границы изображения Imgj, т.е. 
при принятии решения о наведения вооружения на g-ю цель подают команды наведения на привод горизонтального стабилизатора вооружения до момента отработки угла 
при передаче целеуказания обнаруженные цели или важные объекты указывают на экране ВСУ j-го прицела, например, путём наведения центральной прицельной марки на цель или объект и подаче команды на передачу цели, или путём нажатия на область экрана ВСУ, где находится цель или объект, если ВСУ имеет сенсорный дисплей, в любом случае по номеру столбца 

измеряют дальность 
преобразуют вектор 

масштабируют координаты вектора 


составляют проекционную матрицу Sj
рассчитывают векторы координат 

преобразуют координаты цели из СК 

одновременно отображают соответствующие графические маркеры Qq - тактические знаки на цифровую карту местности графического планшета отображения навигационной и тактической информации и передают вектор 
| СПОСОБ УПРАВЛЕНИЯ ОГНЕМ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2014 |
|
RU2603750C2 |
| КОМПЬЮТЕРНО-ТЕЛЕВИЗИОННАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛЬБОЙ | 2002 |
|
RU2226319C2 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 5686690 A, 11.11.1997. | |||

