Изобретение относится к измерительной технике, предназначено для контактного измерения изменения профиля физической величины в различных средах, в частности, профиля температуры в море или атмосфере, и может быть использовано для контроля изменения полей других физических величин в различных областях.
Известен способ измерения профиля температуры на конечном интервале в различных средах с использованием нескольких распределенных датчиков с переменной погонной функцией термочувствительности, модулированной по функциям из ортогонального базиса, реализованный в устройстве [АС СССР 808872, Кл. G01F 23/22. Устройство для измерения температуры / В.А. Гайский. - Опубл. 28.02.81. Бюл. №8].
Этим способом измеряются коэффициенты разложения искомого профиля температуры в ряд Фурье по функциям из этого базиса. При этом необходимо столько распределенных модулированных датчиков, сколько членов разложения (орт) используется. Известно, например, [Латхи Б.П. Системы передачи информации. Перевод с англ., под общей редакцией Б.И. Кувшинова. - М.: «Связь», 1971. - 324 с.], что среднеквадратическая погрешность представления профиля разложением в ряд уменьшается с ростом числа орт.
Например, при представлении функции профиля температуры рядами Уолша на базе L с пространственным разрешением L/N требуется N орт и, соответственно, N распределенных вдоль базы датчиков, являющихся узкополосными фильтрами орт.
Сложность изготовления и стоимость измерительного кабеля с N распределенными датчиками растет с увеличением N, ухудшаются его технические и эксплуатационные характеристики. Поэтому возможности повышения точности и пространственной разрешающей способности измерений профиля физической величины за счет увеличения числа N датчиков ограничены.
Во многих областях контроля окружающей среды и технологических процессов представляет интерес не статический профиль поля физической величины, а его изменение во времени [Гайский В.А., Егупов Н.Д., Корнюшин Ю.П. Применение функций Уолша в системах автоматизации научных исследований. - Киев: Наукова думка, 1983. - 211 с]. Например, это относится к измерению параметров поверхностных и внутренних волн в море, параметров акустических и электромагнитных волн, температуры в системах пожарной сигнализации. Для измерения изменений профиля физической величины может быть применен более экономичный или более точный способ, чем для измерения статического профиля.
Способ, заложенный в основу работы измерителя [АС СССР 808872, Кл. G01F 23/22. Устройство для измерения температуры / В.А. Гайский. - Опубл. 28.02.81. Бюл. №8], выбран в качестве прототипа, потому что наиболее близко совпадает с заявленным изобретением по признакам и технической сущности.
В основу изобретения поставлена задача создания способа измерения изменения профиля поля физической величины, совокупностью существенных признаков которого достигается технический результат - повышение точности и пространственной разрешающей способности измерений.
Поставленная задача решается тем, что для измерения изменения коэффициентов орт представления профиля поля физической величины используют nb распределенных датчиков с погонными функциями чувствительности, модулированными по весовым функциям пространственных многополосных фильтров-датчиков, границы окон пропускания которых устанавливают в соответствии с покрытием подмножества номеров орт v-м значением s-го разряда позиционного b-ичного кода номера орт от 0 до N-1, весовые функции многополосных фильтров-датчиков выполняют равными сумме значений нормированных орт в полосах пропускания, коэффициенты разложения по ортам изменения профиля за заданное время определяют сверкой за это время выходных сигналов датчиков, соответствующих значениям b-ичного n-разрядного номера орты, операции свертки производят одновременно по древовидной схеме b-ичного дешифратора коэффициентов орт, изменение профиля поля физической величины θ(x,t,T) за время Т вычисляют по формуле

где х - пространственная координата на профиле от 0 до L;
t - текущее время;
Т - задаваемое извне время интегрирования, за которое измеряется изменение профиля поля физической величины;
ϕi(х) - ортонормированная функция ряда Фурье (орта), аппроксимирующего профиль θ(х);
i - номер орты в b-ичном коде;
a i(t) - текущее значение коэффициента разложения профиля по орте ϕi(x);
a i(t,T) - текущее изменение коэффициента разложения профиля по орте ϕi(х) за время Т:

где 
ys,v(t) - выходной сигнал s, v-гo многополосного фильтра-датчика, в значениях входной величины соответствующего v-му значению s-го разряда i-го номера орты в b-ичном коде;
 причем 1 - старший разряд.
причем 1 - старший разряд.
При использовании для представления изменений профиля поля физической величины N=2n ортонормированных функций Уолша-Адамара ϕi(x)=hadi(x) [Гайский В.А., Егупов Н.Д., Корнюшин Ю.П. Применение функций Уолша в системах автоматизации научных исследований. - Киев: Наукова думка, 1983. - 211 с], номера i которых кодируют в двоичном коде (b=2, v={0,1}) n разрядами, весовые функции 2n многополосных фильтров-датчиков выполняют равными



gs,v(x)=0, при x≠1, x≠2n-s, для 
и изменение профиля поля физической величины θ(x,t,T) за время T определяют по формуле

при этом ai(t,T) определяется по выражению (2).
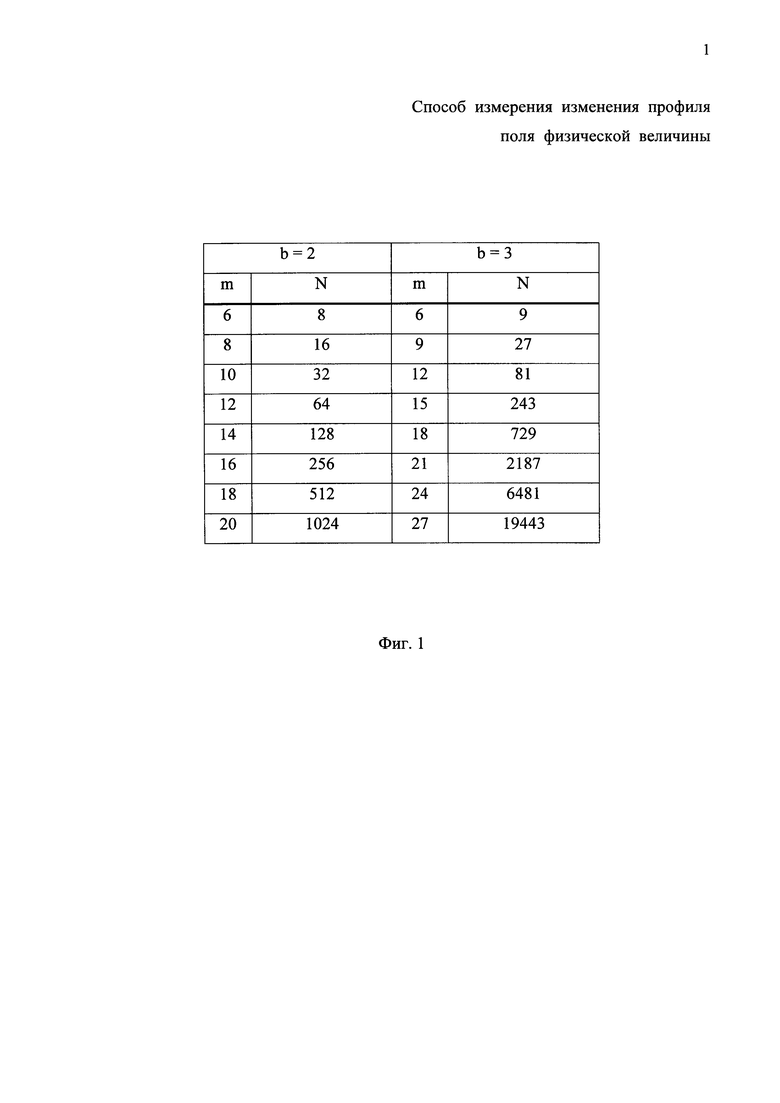
В предлагаемом способе используется m=bn датчиков вместо N=bn, т.е. в 
Описание изобретения иллюстрируется чертежами.
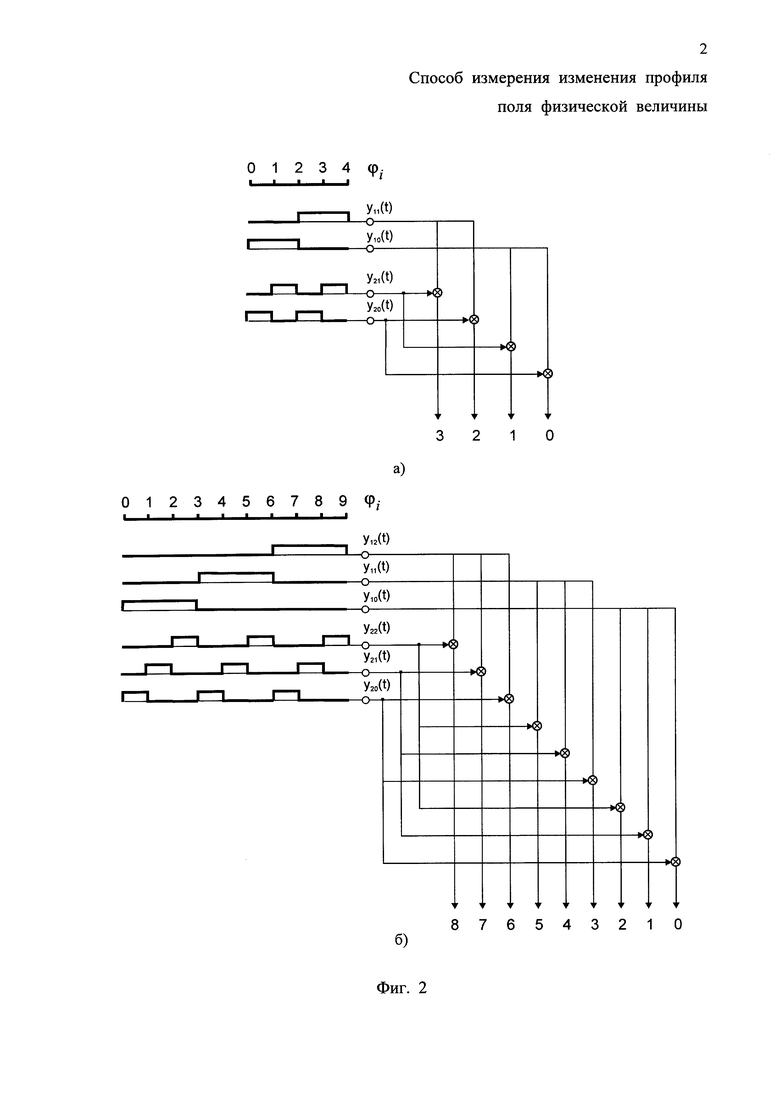
На фиг. 2 показана структурно-функциональная схема формирования многополосных фильтров по кодовым шкалам и дешифрация коэффициентов орт свертками для двоичного (а) и троичного (б) кодирования номеров орт.
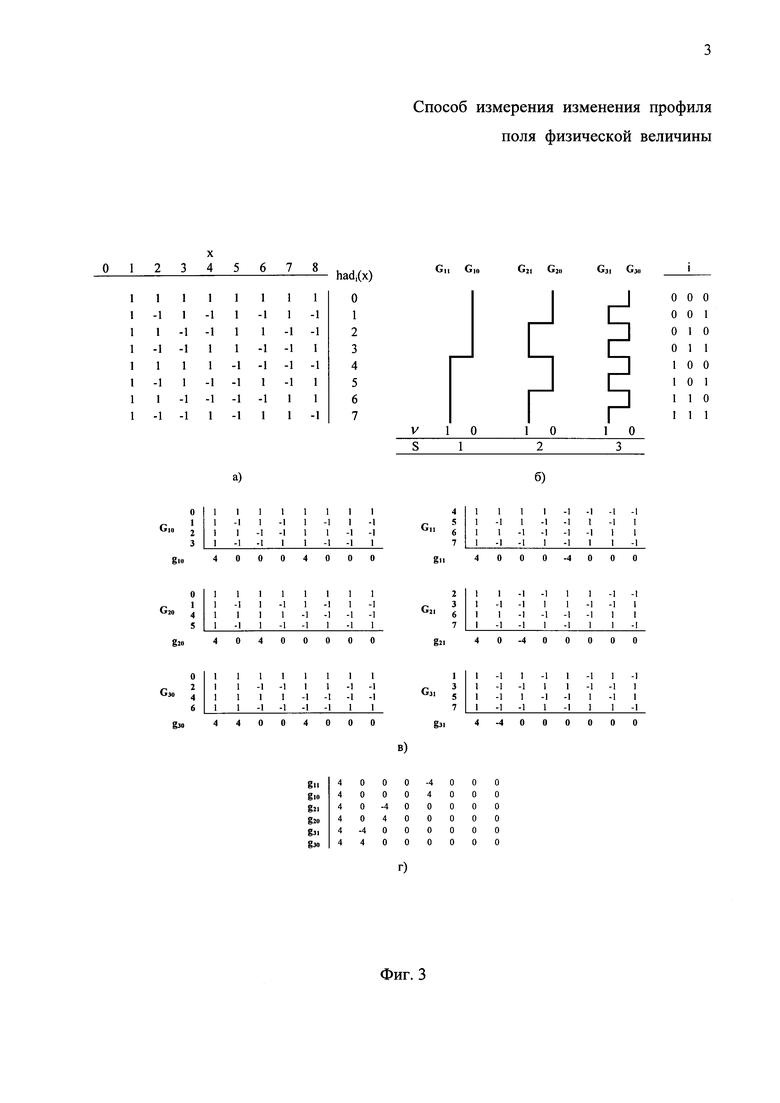
На фиг. 3 приведен пример применения предлагаемого способа с использованием для представления изменения измеряемого профиля поля физической величины функций Уолша-Адамара.
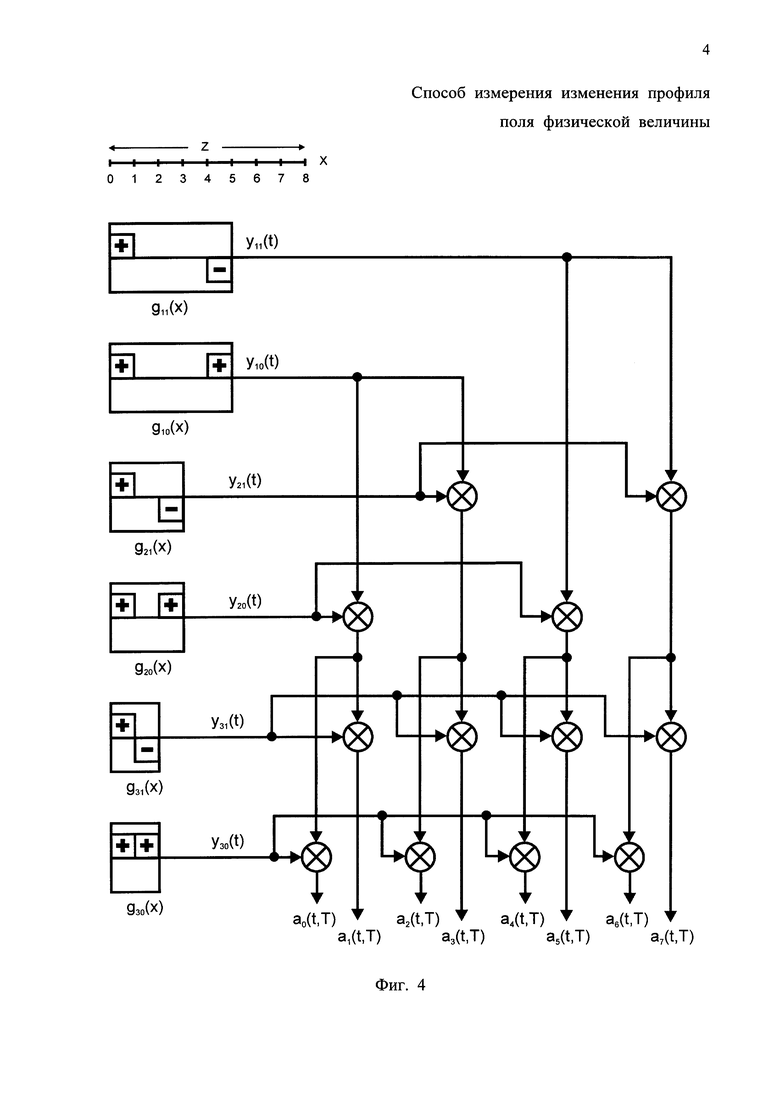
На фиг. 4 приведена структурно-функциональная схема формирования выходных сигналов ysv(t) распределенных датчиков с весовыми функциями пространственных фильтров Уолша-Адамара gsv(x) на базе L из восьми участков в трех разрядах  двоичного кода номера i орты и выделения двоичным дешифратором коэффициентов орт свертками в разрядах.
двоичного кода номера i орты и выделения двоичным дешифратором коэффициентов орт свертками в разрядах.
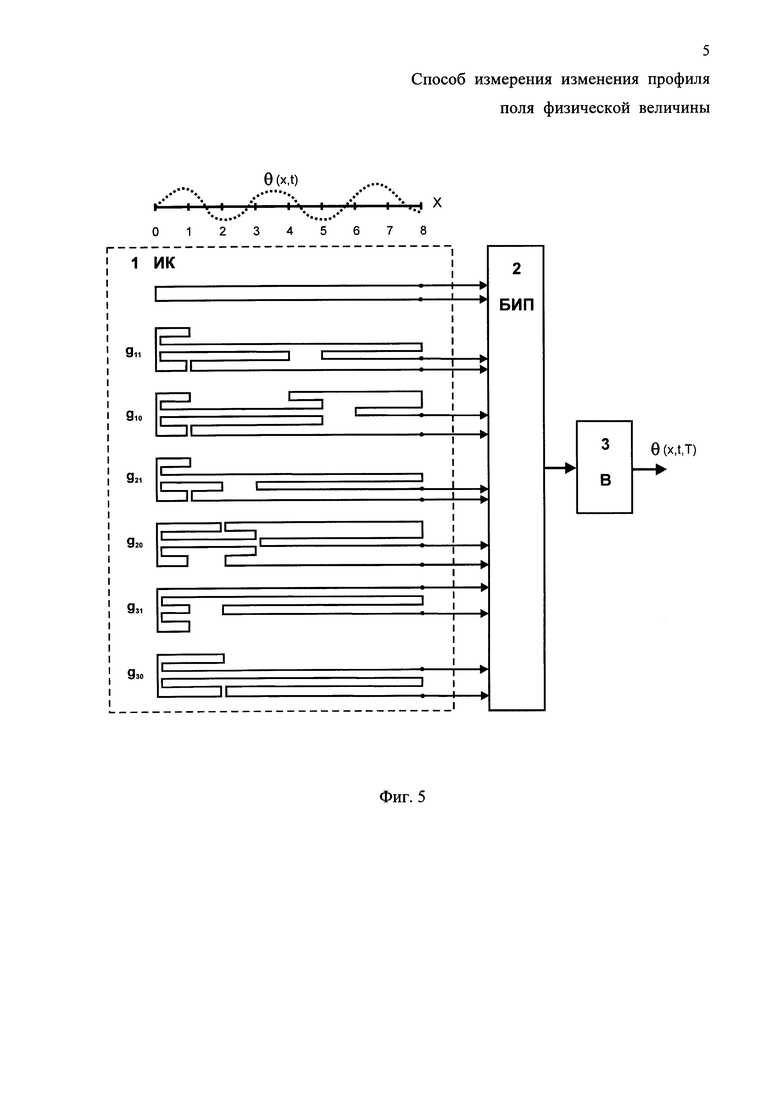
На фиг. 5 показана структурная схема устройства для измерения изменения профиля температуры по предлагаемому способу при использовании фильтров функций Уолша-Адамара и реализации модуляции весовых функций фильтров петлевой укладкой термочувствительных проводов вдоль профиля.
Рассмотрим суть предлагаемого способа.
Предполагаем, что измеряемый мгновенный профиль поля физической величины θ(x,t) вдоль пространственной координаты х на базе [0,L] представляется с достаточной точностью рядом Фурье в виде

где ϕi(х) - функции (орты) из ортонормированного базиса, обладающие свойством

Коэффициенты ai(t) при ортах ϕi(х) измеряются известным способом распределенными датчиками по формуле

Если за некоторое время Т изменится профиль физической величины на θ(x,t,T), то изменятся и коэффициенты на ai(t,T), т.е.


Измерение ai(t,T) известным способом с использованием одного распределенного датчика на каждую орту, реализующего формулу (7), требует N датчиков, что ограничивает возможности повышения точности и разрешающей способности за счет увеличения N из-за возрастания сложности реализации.
Для многих областей характерны динамические поля физических величин, вызванные переносными, турбулентными или волновыми движениями в жидких и газообразных средах, и прохождением динамических тепловых, электромагнитных и акустических излучений через различные среды.
В этих случаях, когда информативным является не статический мгновенный профиль θ(x,t) физической величины, а его изменение за заданное время T, т.е. θ(x,t,T), возможно уменьшение числа необходимых распределенных датчиков при том же числе N измеряемых изменений коэффициентов ai(t,T) орт.
Для этого необходимо перейти от узкополосной фильтрации каждой орты профиля одним распределенным датчиком к многополосной кодированной фильтрации подмножеств орт следующим образом.
Упорядочим орты в их естественной последовательности  . Кодируем номера i орт в b-ичной позиционной системе счисления n-разрядным словом, в которой каждый разряд может принимать "b" значений v={0,1, …, (b-1)}. Каждому значению v s-го разряда кода номера орты поставим в соответствие подмножество Gsv номеров орт, покрываемых шкалой кодирования так, как показано на фиг. 2. В каждом подмножестве Gsv будет N/b орт, а подмножеств будет nb. Столько же многополосных фильтров-датчиков используется, причем подмножества Gsv определяют границы многополосных фильтров, а весовые функции gsv(x) датчиков выполняются суммированием значений орт из подмножеств Gsv по формуле
. Кодируем номера i орт в b-ичной позиционной системе счисления n-разрядным словом, в которой каждый разряд может принимать "b" значений v={0,1, …, (b-1)}. Каждому значению v s-го разряда кода номера орты поставим в соответствие подмножество Gsv номеров орт, покрываемых шкалой кодирования так, как показано на фиг. 2. В каждом подмножестве Gsv будет N/b орт, а подмножеств будет nb. Столько же многополосных фильтров-датчиков используется, причем подмножества Gsv определяют границы многополосных фильтров, а весовые функции gsv(x) датчиков выполняются суммированием значений орт из подмножеств Gsv по формуле

При этом выходные сигналы многополосных фильтров-датчиков ysv{t) будут изменяться с изменением θ(x,t) во времени

Таким образом, каждому номеру i орты в b-ичном коде соответствует свой набор пространственных многополосных фильтров-датчиков. Если бы это были временные фильтры и временные орты, то их коммутация в последовательной цепочке согласно с кодом номера орты позволяла бы сформировать окно пропускания только для орты с этим номером. Поскольку здесь пространственные многополосные фильтры-датчики включены параллельно, то для выделения приращения коэффициента избранной орты, как общей составляющей в выходных сигналах всех датчиков, необходимо произвести последовательно свертку выходных сигналов датчиков ysv(t) на заданном интервале времени T, соответствующих v элементам b-ичного кода в s-м разряде номера орты.
Для выделения сигналов изменения коэффициентов всех орт свертка выходных сигналов всех датчиков выполняется по древовидной схеме дешифратора b-ичного кода по выражению

где i=[1,2,3,…nv] номер орты представлен в 6-ичном коде и индексация разрядов кода номера орты совпадает с индексацией весовых функций gsv датчиков и их выходных сигналов ysv(t).
Подстановка выражения (11) в выражение (12) дает

В выражении (13) произведения сумм всех орт дадут выражения вида

В итоге из выражения (13) получим
Окончательно получим 
Таким образом, для измерения изменений N коэффициентов орт представления пространственного профиля физической величины потребовалось logbN распределенных многополосных фильтров-датчиков вместо N. Поскольку для функций Уолша N=2n, то для них целесообразно кодирование номеров орт двоичным кодом (b=2). Как раз здесь имеет место случай, когда известная экономичность физического представления слов при троичном кодировании (b=3) дает минимальное число распределенных датчиков для измерения. Целесообразность кодирования с другими основаниями позиционной системы счисления остается не ясной.
Рассмотрим реализацию способа с использованием представления профиля поля физической величины функций Уолша-Адамара hadi{x) [Гайский В.А., Егупов Н.Д., Корнюшин Ю.П. Применение функций Уолша в системах автоматизации научных исследований. - Киев: Наукова думка, 1983. - 211 с]. На фиг. 3 показана матрица функций Уолша-Адамара для N=8 (а), двоичная шкала кодирования номеров орт (б), формирование подмножеств орт Gsv в соответствии с разрядами кодирования и весовых функций gsv(х) многополосных фильтров суммой орт Gvs (в) и, наконец, сводка весовых функций многополосных фильтров gvs(x) Уолша-Адамара (г).
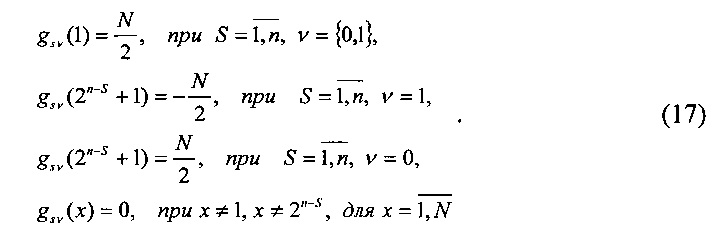
Отметим особенности весовых функций gsv(x) многополосных функций Уолша-Адамара. Во-первых, они имеют уже не два (как hadi(х)) значения, а три (+,0,-). Во-вторых, поскольку амплитуда всех gsv(x) равна |N/2|, то общий множитель N12 может быть вынесен и модуляция gsv(x) может выполняться значениями (+1,0,-1). В третьих, модуляция весовых функций gsv(х) проще, чем модуляция hadi(x), поскольку реально только две координаты на базе [0,L] имеют не нулевые значения. В-четвертых, значения весовых функций многополосных фильтров Уолша-Адамара определяются выражениями
В продолжение рассмотренного примера на фиг. 4 приведена структурно-функциональная схема выполнения предлагаемого способа с весовыми функциями датчиков и двоичным дешифратором приращений коэффициентов орт на основе дерева операций свертки.
Легко убедиться в работоспособности способа на конкретных числовых примерах, представленных на фиг. 3 и 4. При задании значения Т-интервала времени изменения профиля поля физической величины, необходимо учитывать следующее:
- первичной измерительной информацией, на основании которой дается заключение об изменении профиля, являются выходные сигналы ysv(t) датчиков, которые могут быть зарегистрированы и использованы в дальнейшем для определения изменений профиля за различные времена Т;
- при цифровой регистрации выходных сигналов ysv(t) датчиков число отсчетов каждого из них во времени для реализации свертки их значений должно быть не менее N;
- при реализации операций сверки интервал интегрирования T, как в реальном времени, так и при апостериорной обработке данных, может быть выбран скользящим от t-Т до t или с синхронизацией нуля от t=0 до t=Т;
- операции свертки при разных Т могут выполняться как последовательно, так и параллельно при соответствующем увеличении вычислительных ресурсов.
В продолжение рассмотренного примера реализации способа измерения изменений профиля поля физической величины на фиг. 5 показано устройство для измерения изменений в профиле температуры.
Устройство содержит измерительный кабель (ИК) 1, блок измерительных преобразователей (БИП) 2, вычислитель (В) 3.
Измерительный кабель 1 состоит из распределенных многополосных фильтров-датчиков с весовыми функциями gsv(x) термочувствительных проводов, погонная модуляция термочувствительности которых выполнена продольной петлевой укладкой проводов так, как это показано на фиг. 5, в соответствии с фиг. 3 и 4.
Блок измерительных преобразователей (БИП) 2 предназначен для преобразования сопротивлений терморезисторных датчиков в код и выдачи этих значений в вычислитель (В) 3. БИП может быть выполнен традиционно в составе коммутатора, вторичного измерительного преобразователя и аналого-цифрового преобразователя с соответствующим быстродействием.
Вычислитель 3 предназначен для восстановления мгновенных значений температуры на входе датчиков и выполнения операций свертки за время Т с вычислением изменения коэффициента ai(t,T) при hadi(x) и вычисления изменений профиля θ(х,t,Т) по формуле (8).
В процессе работы устройство реализует заявленный способ следующим образом.
Измерительный кабель 1 размещается по траектории х профиля θ(x,t), распределенные многополосные фильтры-датчики gsv(x) отслеживают изменение температуры θ(х,t) на профиле соответствующим изменением сопротивлений, которые преобразуются блоком измерительных преобразователей в цифровые последовательности, поступающие далее в вычислитель 3. Вычислитель 3, на основании градуировочных характеристик измерительных каналов, включающих датчик и измерительные преобразователи, а также динамики выходных сигналов, восстанавливает известным способом мгновенное значение средневзвешенной по профилю температуры для каждого из датчиков, что и является выходным сигналом ysv{t) соответствующего датчика. Далее вычислитель производит свертку выходных сигналов датчиков за заданное время Т, вычисляя сигналы zi(t,T) по формуле (12), определяет изменения коэффициентов ai(t,T) орт по формуле (16) и восстанавливает значения изменения профиля температуры θ(х,t,Т) по формуле (8).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения температуры | 1979 |
|
SU808872A1 |
| Устройство для измерения электроповодности жидкости | 1979 |
|
SU883729A1 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕННОГО ДАТЧИКА ТЕМПЕРАТУРЫ С ПЕРЕМЕННЫМ ПОГОННЫМ КОЭФФИЦИЕНТОМ ЧУВСТВИТЕЛЬНОСТИ | 1991 |
|
RU2049313C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 2021 |
|
RU2767024C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ НАПРАВЛЕННОГО ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА | 2014 |
|
RU2549251C1 |
| Устройство для измерения упругих деформаций конструкции | 1980 |
|
SU937998A1 |
| Устройство для измерения профиля температуры | 1985 |
|
SU1348663A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| ВЫСОКОЭФФЕКТИВНОЕ МУЛЬТИПЛЕКСИРОВАНИЕ | 2018 |
|
RU2758202C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЕЙ ТЕМПЕРАТУРЫ, ДАВЛЕНИЯ И ПЛОТНОСТИ В ЖИДКОСТИ | 2018 |
|
RU2682080C1 |
Изобретение относится к способам контактного изменения профиля физической величины в различных средах, в частности профиля температуры в море или атмосфере. При осуществлении способа измерения изменения профиля поля физической величины используют распределенные датчики с переменной погонной функцией чувствительности. Погонную функцию чувствительности этих распределенных датчиков выполняют по весовым функциям пространственных многополосных фильтров-датчиков, границы пропускания которых устанавливают в соответствии с покрытием подмножества номеров орт ряда Фурье v-м значением s-го разряда b-ичного кода номера орты от 0 до N-1. Весовые функции многополосных фильтров-датчиков выполняют равными сумме значений нормированных орт в полосах пропускания. Коэффициенты разложения по ортам изменения профиля за заданное время определяют сверткой за это время выходных сигналов многополосных фильтров-датчиков, соответствующих значениям b-ичного n-го разрядного кода номера орты. Операции свертки производят одновременно по древовидной схеме b-ичного дешифратора коэффициентов орт. Изменение профиля поля физической величины θ(x,t,T) за время Т вычисляют по формуле
где х - пространственная координата на профиле от 0 до L;
t - текущее время;
Т - задаваемое извне время интегрирования, за которое измеряется изменение профиля поля физической величины;
ϕi(х) - орта ряда Фурье, аппроксимирующего профиль θ(х);
i - номер орты в b-ичном коде;
a
i(t,T) - текущее изменение коэффициента разложения профиля по орте ϕi(х) за время Т. Технический результат изобретения заключается в повышении точности и пространственной разрешающей способности измерений. 5 ил.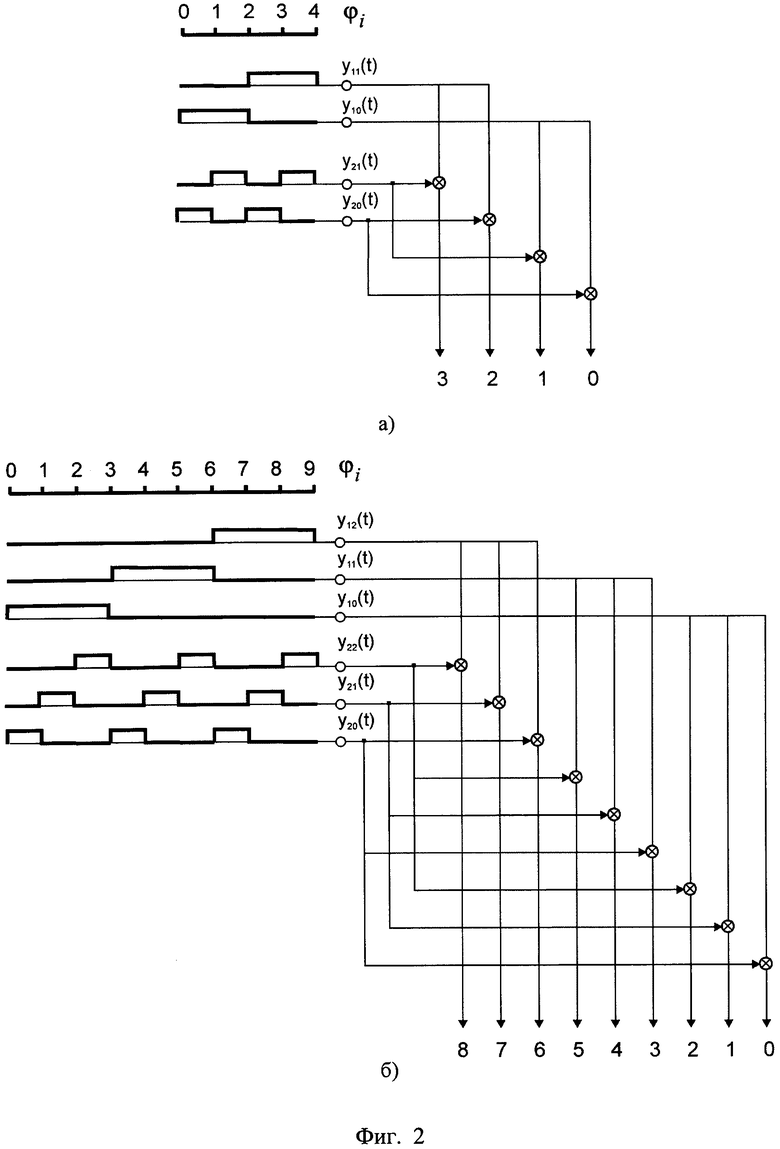
Способ измерения изменения профиля поля физической величины с использованием распределенных датчиков с переменной погонной функцией чувствительности, отличающийся тем, что используют распределенные датчики, погонную функцию чувствительности которых выполняют по весовым функциям пространственных многополосных фильтров-датчиков, границы пропускания которых устанавливают в соответствии с покрытием подмножества номеров орт ряда Фурье v-м значением s-го разряда b-ичного кода номера орты от 0 до N-1, весовые функции многополосных фильтров-датчиков выполняют равными сумме значений нормированных орт в полосах пропускания, коэффициенты разложения по ортам изменения профиля за заданное время определяют сверткой за это время выходных сигналов многополосных фильтров-датчиков, соответствующих значениям b-ичного n-го разрядного кода номера орты, операции свертки производят одновременно по древовидной схеме b-ичного дешифратора коэффициентов орт, изменение профиля поля физической величины θ (x,t,T) за время Т вычисляют по формуле
где х - пространственная координата на профиле от 0 до L;
t - текущее время;
Т - задаваемое извне время интегрирования, за которое измеряется изменение профиля поля физической величины;
ϕi (x) - орта ряда Фурье, аппроксимирующего профиль θ (х);
i - номер орты в b-ичном коде;
аi (t) - текущее значение коэффициента разложения профиля по орте ϕi (x);
аi (t, T) - текущее изменение коэффициента разложения профиля по орте ϕi (x) за время T:
где 
ys,v (t) - выходной сигнал s, v-го многополосного фильтра-датчика, в значениях входной величины соответствующего v-му значению s-го разряда i-го номера орты в b-ичном коде;
 причем 1 - старший разряд,
причем 1 - старший разряд,
при этом в случае использования базиса функций Уолша-Адамара ϕi (x)=hadi(x), номера i которых в естественном порядке кодируют в двоичном коде (b=2, v={0, 1}) n разрядами, используют 2n многополосных фильтров-датчиков, весовые функции gs,v (x) которых выполняют по формулам
 при
при  v={0, 1};
v={0, 1};
 при
при  v=1;
v=1;
 при
при  v=0;
v=0;
gs,v (x)=0, при x≠1, х≠2n-s + 1,
и изменение профиля поля физической величины θ (x,t,T) за время Т вычисляют по формуле
| Устройство для измерения температуры | 1979 |
|
SU808872A1 |
| Способ определения вертикального распределения параметра атмосферы | 1980 |
|
SU1013890A1 |
| Способ исследования функции внешнего дыхания человека | 1976 |
|
SU693197A1 |
| СПОСОБ ОЦЕНКИ ТЕМПЕРАТУРЫ В НЕДРАХ ЗЕМЛИ | 2006 |
|
RU2326413C1 |
| Картофелесажалка | 1929 |
|
SU18422A1 |

