Изобретение относится к области измерительной техники и предназначено для использования в океанологии и может быть использовано в других областях.
Измерения плотности жидкости осуществляются во многих областях научных исследований и в технологических процессах с разной точностью, достигающей 1⋅10-6 в лабораторных измерениях проб, т.е. в изолированной среде.
В океанологии имеется потребность измерений плотности воды в неизолированной среде при зондировании моря от поверхности до глубин в несколько километров. В резервуарах с нефтепродуктами также необходимо измерять плотность жидкости при зондировании.
Известен вибрационный способ денситомстрии плотности проб жидкости с высокой точностью ±1,5⋅10-6 [А. Иванов. Введение в океанографию. Перевод с французского Е.П. Плихина и Е.К. Шифриной. Под редакцией Ю.Б. Очаковского и К.С. Шифрина. Изд. «Мир», Москва, 1978. 574 с. С. 81-82]. В зондирующих приборах для автоматических измерений локальной плотности этот способ применения не получил.
Известно широкое применение рефрактометрических методов для измерения плотности жидкостей [Рефрактометрические методы в физико-химических измерениях / под редакцией проф. Л.Д. Конопелько. Изд. Триумф, М., 2020. 208 с.]. В неизолированных жидкостях рефрактометры достигли точности 1⋅10-5, но оказались сложны в эксплуатации и получили ограниченное распространение. Например, погружной рефрактометр для нефти (погрешность 4⋅10-5 [Миненко Ю.В. Интерференцированный рефрактометр для исследования технологических жидкостей. Контрольно-измерительная техника. РЖ ВИНИТИ. Метрология. 2002. С. 22-32]. Известны неоднократные попытки создания рефрактометров для использования в океанографических зондах, но далее экспериментальных образцов их разработки не продвинулись.
Вместе с тем, актуальность в использовании прямого измерения плотности в море возрастает. Для использования в современных гидротермодинамических моделях необходимы экспериментальные вертикальные профили температуры и плотности в координатах температура-глубина и плотность-глубина [Руководство по гидрологическим работам в океанах и морях. Л.: Еидрометеоиздат, 1977. 72 с.].
В современных массовых измерениях непосредственно в среде плотность не измеряется, а вычисляется из совокупных измерений давления, температуры и электропроводности или давления, температуры и скорости звука с использованием уравнения состояния морской воды, которое для океанических вод связывает эти величины с погрешностью тысячных долей процента (последнее уточнение TEOS-10) [IOC, SCOR and IAPSO, 2010. The international thermodynamic equation of seawater 2010: Calculation and use of thermodynamic properties. International Oceano-graphic Commission, Manuals and Guides. No. 56. UNESCO (English). 196 pp.(Available from http://www.TEOS-10.org)].
Поскольку для окраинных морей и прибрежных вод это уравнение состояния требует внесения региональных поправок, которые периодически уточняются и будут уточняться впредь, то целесообразно исключить его из способа определения плотности морской воды и измерять плотность непосредственно в данной «точке», фактически средней по отрезку глубины, соответствующему пространственному разрешению используемых СТД-зондов. т.е. локальной плотности.
Примем длину этого отрезка равной 5⋅10-2 м, необходимую точность измерения локальной плотности, согласно TEOS-10, равной 4⋅10-6. Перепад давления на этом отрезке в море составит давлений  при внешнем давлении от 1 до 0,1 Ηа, где Η - глубина зондирования в метрах, например, для Черного моря, до 200а.
при внешнем давлении от 1 до 0,1 Ηа, где Η - глубина зондирования в метрах, например, для Черного моря, до 200а.
Известны работы, в которых для измерения локальной плотности при зондировании предлагается использовать модификации гидростатического метода. Например, [Жемков Е.И. Метод и устройство гидростатического измерения плотности морской воды. Материалы 12 Международной науч.-техн. конф. «Современные методы и средства океанологических исследований. Ч. 1. М., 2011. С. 95-97|.
В этой работе предлагается определять плотность по разности давлений на концах штанги известной длины, а отклонение штанги от вертикали контролировать по разности давлений на концах двух других штанг, установленных прямоугольным крестом горизонтально.
В другой работе [Федотов Г.А. Новая модификация гидростатического метода определения плотности морской воды. Фундаментальные проблемы современной гидродинамики. 2013. Т. 6, №1. С. 58-65] показана возможность использования произвольно ориентированных относительно вертикали трех штанг, установленных вертикально в форме трехгранной пирамиды с четырьмя датчиками давления на вершинах, для определения плотности морской воды по трем разностям давления вдоль ребер.
Достоинством данного предложения является инвариантность результата к ориентации штанг относительно вертикали. Поэтому принимаем этот способ за аналог,
Однако общим недостатком обоих этих способов является то, что не раскрыт механизм измерения разности давлений в двух пространственно разнесенных точках, а получение этой величины с указанной выше точностью цифровым вычитанием двух измеренных абсолютных давлений, включая внешнее, требует обеспечение точности ~10-10, что на современном уровне техники не реализуемо. Кроме того, линейная интерполяция давления по двум точкам будет не точной при произвольном профиле давления, например, для выпуклого или вогнутого профиля среднее значение не совпадает.
В работе [Красподубец Л.Α., Пеньков М.Н. Компьютерное моделирование гидростатического измерителя плотности морской воды. Системы контроля окружающей среды. Севастополь. ИПТС. 2020. Вып.1 (39). С. 71-76] приводится гипотетический пример гидростатического измерителя плотности с дифференциальным датчиком давления, который не работоспособен из-за отсутствия механизма обеспечения передачи давления от двух разнесенных точек пространства к дифференциальному датчику давления.
В работе [Патент RU №2682080. Опубл. 14.03.2019. Бюл. №8. Гайский В.А., Гайский П.В. Способ измерения профилей температуры, давления и плотности в жидкости] предлагается использовать распределенные модулированные по ортогональным функциям датчики с чувствительными элементами из трех параллельных проводов, имеющих разные коэффициенты термо и тензочувствительности при вертикальной стационарной постановке. Достоинства способа в распределенном восприятии давления датчика и в коррекции температурной погрешности тензометров и погрешности термодатчиков от тензоэффекта. Поэтому принимаем его за прототип. Однако для прямого использования в зонде этот способ не пригоден.
Таким образом, известные способы измерения локальной плотности не получили практического осуществления в океанологических зондах из-за сложности реализации и использования, низкой точности измерения разности давлений на локальной измерительной базе, не обеспеченной точности измерения и сохранения размера локальной измерительной базы, погрешности от влияния температуры на датчики давления.
Целью предлагаемого изобретения является упрощение реализации и использования способа измерения локальной плотности.
Эта цель достигается тем, что используют три распределенных датчика, которые устанавливают на трех штангах на участках протяженностью в два раза большей размера локального измерения плотности, для представления профиля сопротивления на заданном участке двумя функциями Уолша-Адамара формируют пространственную модуляцию двух подэлементов каждого чувствительного элемента продольной петлевой укладкой проводов на участке измеряют разность сопротивлений проводов вторичным измерительным преобразователем в аналоговом виде и преобразовывают ее в цифровую форму, восстанавливают профиль сопротивления, определяют перепад сопротивления на профиле и решением системы линейных алгебраических уравнений для трех чувствительных элементов каждого датчика определяют перепад давления на локальной измерительной базе по каждой из осей координат и по вертикали и локальную плотность жидкости, в частности, морской воды ρ{ϕ, h) в точке на географической широте ϕ и глубине h по формуле
где g(ϕ, h)=978,049(l+0,005288sin2α-0,000006sin2 2ϕ-0,0003086h) [см /с]2.

ΔРj- перепад давления на профиле j-го датчика,

 - сопротивление провода нулевого подэлемента i-го чувствительного элемента j-го датчика,
- сопротивление провода нулевого подэлемента i-го чувствительного элемента j-го датчика,
 - сопротивление провода первого подэлемента i-го чувствительного элемента j-го датчика,
- сопротивление провода первого подэлемента i-го чувствительного элемента j-го датчика,
 - сопротивление проводов 0 и 1 подэлемента i-го чувствительного элемента j-го датчика в начале шкалы,
- сопротивление проводов 0 и 1 подэлемента i-го чувствительного элемента j-го датчика в начале шкалы,
ΔНх, ΔΗy, ΔНz - размеры локальных измерительных баз, конструктивные величины, определяются градуировкой,
αi - коэффициент термочувствительности,
β1 - коэффициент тензочувствительности.

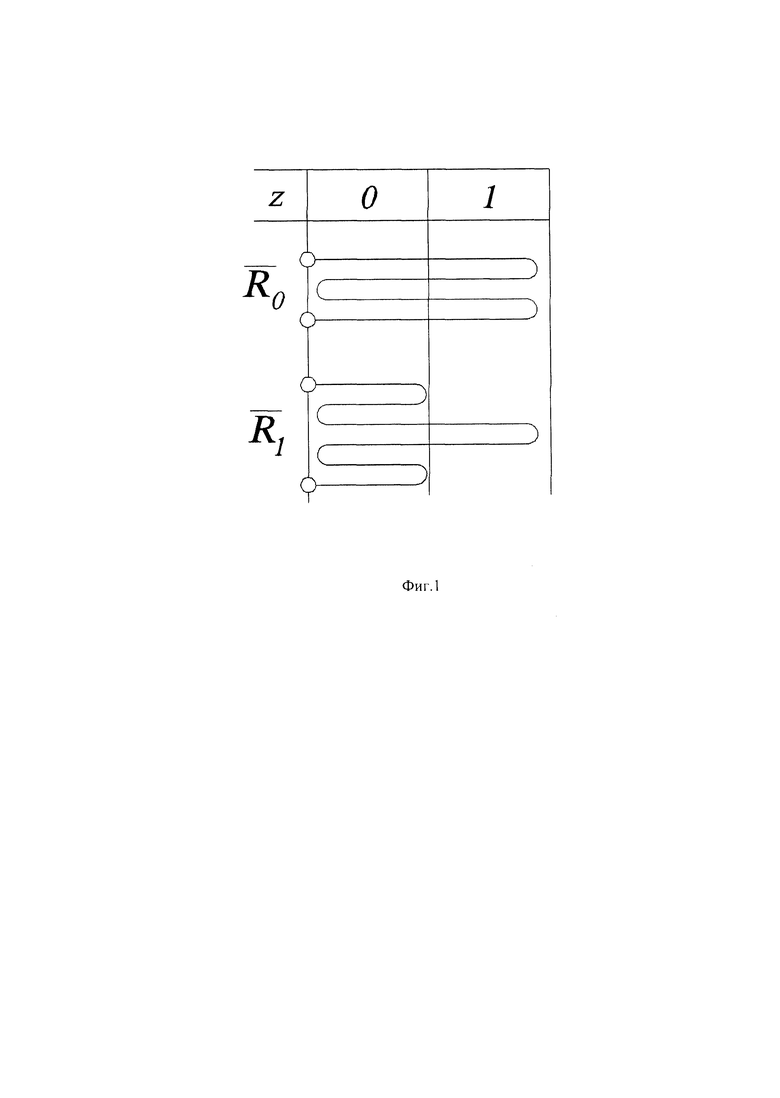
Описание изобретения содержит фиг. 1 с представлением петлевой укладки проводов для модуляции локальной чувствительности.
Рассмотрим обоснование рассматриваемого способа. Локальную плотность жидкости на отрезке глубины ΔН будем определять по формуле

где g(ϕ, h) - ускорение свободного падения в точке измерений с географической широтой ϕ и глубиной z, предполагается априори известным с требуемой точностью, допустим с погрешностью 10-6. Тогда величину  - приращение давления на отрезке глубины ΔН, можно измерять с погрешностью не большей 4⋅10-6, чтобы удовлетворить требования термодинамического уравнения состояния морской воды TEOS-10. Учтем влияние температуры на тензочувствительность и наоборот. В качестве чувствительных элементов равномерно распределенных датчиков принимаем провода, имеющие чувствительность α по температуре и β тензочувствительность по давлению так, что интегральное сопротивление провода на отрезке равно
- приращение давления на отрезке глубины ΔН, можно измерять с погрешностью не большей 4⋅10-6, чтобы удовлетворить требования термодинамического уравнения состояния морской воды TEOS-10. Учтем влияние температуры на тензочувствительность и наоборот. В качестве чувствительных элементов равномерно распределенных датчиков принимаем провода, имеющие чувствительность α по температуре и β тензочувствительность по давлению так, что интегральное сопротивление провода на отрезке равно

где  - интегральные значения температуры и давления на некотором отрезке;
- интегральные значения температуры и давления на некотором отрезке;  - интегральное сопротивление провода при начальных значениях температуры (например, 0°С) и давления (0 атмосфер).
- интегральное сопротивление провода при начальных значениях температуры (например, 0°С) и давления (0 атмосфер).
Предполагается, что величина  а также коэффициенты чувствительности α и β известны априорно с необходимой точностью ~10-6 или могут быть получены такими градуировкой для конкретного устройства. Для определения
а также коэффициенты чувствительности α и β известны априорно с необходимой точностью ~10-6 или могут быть получены такими градуировкой для конкретного устройства. Для определения  в результате измерения
в результате измерения  используется параллельно три равномерно распределенных чувствительных подэлемента с разными величинами
используется параллельно три равномерно распределенных чувствительных подэлемента с разными величинами  и решение системы линейных алгебраических уравнений
и решение системы линейных алгебраических уравнений

Расширенная матрица системы имеет вид

Определитель системы

Значение температуры

Значение давления

Таким образом, для коррекции влияния температуры на измерение давления и наоборот используют параллельно три разных чувствительных подэлемента. Для определения плотности необходимо найти градиент на профиле давления.
Информативным параметром на выходе распределенного чувствительного подэлемента является профиль сопротивления, содержащий воздействие температуры и давления.
Представим этот профиль R(z) разложением на отрезке 2ΔΗ в ряд Уолша-Адамара всего из двух членов

где амплитуды функций разложения задаются матрицей
Коэффициенты разложения определяются по формулам


Для аппаратной реализации функций разложения профиля  осуществим петлевую укладку провода чувствительного элемента так, как это показано на фиг. 1
осуществим петлевую укладку провода чувствительного элемента так, как это показано на фиг. 1
Примем за амплитуду функций разложения сопротивление 2-х последовательных проводников на интервале ΔН. Тогда интеграл в выражении (10) будет равен  где
где  - измеренное сопротивление 0-го провода, если
- измеренное сопротивление 0-го провода, если  - измеренное сопротивление 1-го провода, то интеграл в выражении (11) равен
- измеренное сопротивление 1-го провода, то интеграл в выражении (11) равен  Для коэффициентов разложения получим
Для коэффициентов разложения получим


Выражение (8) для профиля  и участков
и участков  перепада сопротивления на расстоянии ΔН приобретают вид
перепада сопротивления на расстоянии ΔН приобретают вид




Следовательно, необходимо измерить текущую разность сопротивлений  в аналоговом виде. Это возможно с точностью ~10-6, и далее эта разность сопротивлений пересчитывается в разность давлений ΔР на отрезке ΔН.
в аналоговом виде. Это возможно с точностью ~10-6, и далее эта разность сопротивлений пересчитывается в разность давлений ΔР на отрезке ΔН.
Для учета влияния температуры θ опять используем три чувствительных элемента с парами модулированных по функциям Уолша-Лдамара подэлементов и систему из трех алгебраических уравнений аналогично (3).
Однако они будут содержать перепады  и иметь вид
и иметь вид

Определитель системы D аналогичен (4). Сопротивление i-го чувствительного элемента  при нулевых начальных условиях θ и Ρ известно априорно или может быть определено градуировкой. Решением (17) получим
при нулевых начальных условиях θ и Ρ известно априорно или может быть определено градуировкой. Решением (17) получим

Далее локальную плотность жидкости определяют по формуле (1), причем
g(ϕ, h)=978,049(l+0,005288 sin2α-0,000006sin2 2ϕ-0,0003086h) [см/с2].
При зондировании в открытой среде для определения отношения  к вертикали используют три распределенных датчика, каждый с тремя парами чувствительных подэлементов, располагают датчики вдоль трех штанг, установленных по осям x, y, z прямоугольной системы координат, ориентированных вниз по главной диагонали квадранта.
к вертикали используют три распределенных датчика, каждый с тремя парами чувствительных подэлементов, располагают датчики вдоль трех штанг, установленных по осям x, y, z прямоугольной системы координат, ориентированных вниз по главной диагонали квадранта.
Измеряют разность сопротивлений и определяют этими датчиками величины проекции вертикального градиента давления на оси координат  и вертикальный градиент давления
и вертикальный градиент давления

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЕЙ ТЕМПЕРАТУРЫ, ДАВЛЕНИЯ И ПЛОТНОСТИ В ЖИДКОСТИ | 2018 |
|
RU2682080C1 |
| ИЗМЕРИТЕЛЬ ПЛОТНОСТИ ЖИДКОСТИ И ЕГО ВАРИАНТЫ | 2021 |
|
RU2792263C2 |
| Способ измерения изменения профиля поля физической величины | 2014 |
|
RU2627979C2 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕННОГО ДАТЧИКА ТЕМПЕРАТУРЫ С ПЕРЕМЕННЫМ ПОГОННЫМ КОЭФФИЦИЕНТОМ ЧУВСТВИТЕЛЬНОСТИ | 1991 |
|
RU2049313C1 |
| Устройство для измерения профиля температуры | 1985 |
|
SU1348663A1 |
| Устройство для измерения температуры | 1979 |
|
SU808872A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКОВ ЖИДКОСТЕЙ И ГАЗОВ | 2014 |
|
RU2549256C1 |
| Устройство для измерения электроповодности жидкости | 1979 |
|
SU883729A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ НАПРАВЛЕННОГО ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА | 2014 |
|
RU2549251C1 |
| Способ измерения вертикального профиля плотности морской воды и устройство для его осуществления | 2014 |
|
RU2631017C2 |
Изобретение относится к области измерительной техники и предназначено для использования в океанологии и может быть использовано в других областях. Предложена модификация гидростатического способа для измерения локальной плотности жидкости непосредственно в среде с высоким внешним давлением, например в море на глубине с помощью океанологического зонда. В основе используются распределенные проводные резисторные датчики температуры и давления с тремя разными по тензо- и температурной чувствительности элементами, содержащими по два элемента, в общей мягкой оболочке, установленных на локальных участках трех штанг из материала с малым коэффициентом температурного расширения и ориентированных вниз по осям прямоугольной системы координат, вторичные измерительные преобразователи разности сопротивлений, аналого-цифровые преобразователи и процессор. При этом участки установки датчиков выполняют протяженностью, в два раза большей требуемого размера локального измерения плотности, для представления профиля сопротивления на заданном участке двумя функциями Уолша-Адамара формируют пространственную модуляцию двух подэлементов каждого чувствительного элемента продольной петлевой укладкой проводов на участке, измеряют разность сопротивлений проводов вторичным измерительным преобразователем в аналоговом виде, преобразуют ее в цифровую форму, решением системы линейных алгебраических уравнений для трех чувствительных элементов каждого датчика определяют перепад давления на локальной измерительной базе по каждой из осей координат как проекций на них вертикального перепада давления, который определяют из измеренных и вычисленных проекций, и далее определяют плотность жидкости. Технический результат - упрощение реализации и использования способа измерения локальной плотности и повышение точности измерений. 1 ил.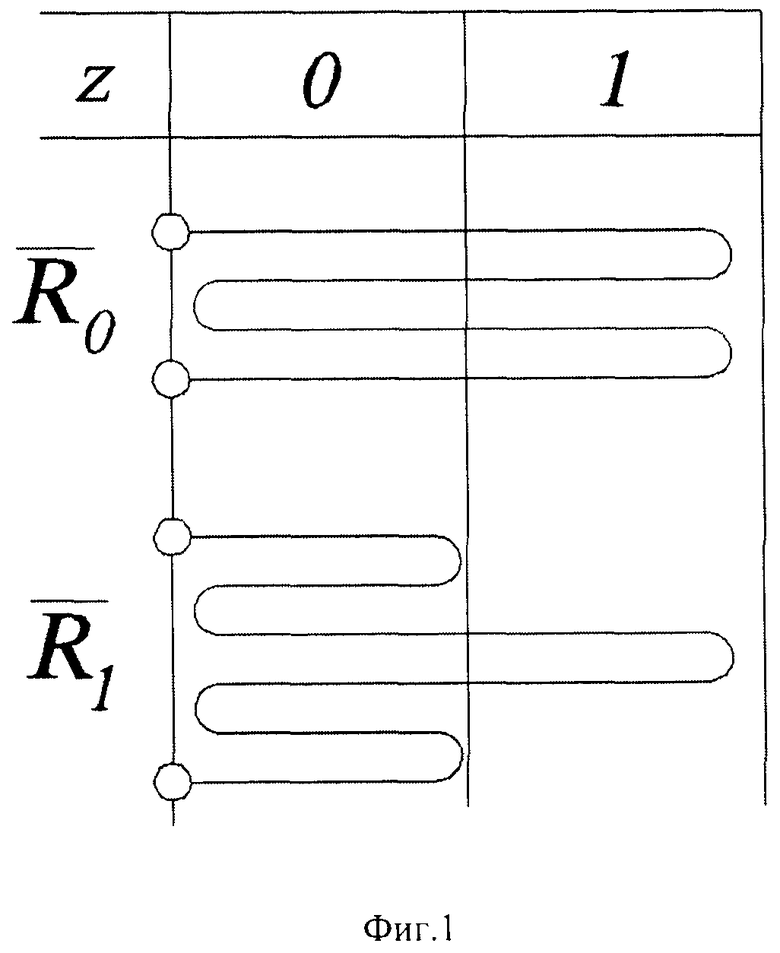
Способ измерения плотности жидкости с использованием распределенных проводных резисторных датчиков температуры и давления с тремя разными по тензо- и температурной чувствительности элементами в общей мягкой оболочке и трех штанг из материала с малым коэффициентом температурного расширения и ориентированных вниз по осям прямоугольной системы координат, вторичных измерительных преобразователей, аналого-цифровых преобразователей и процессора, отличающийся тем, что три распределенных датчика выполняют из двух подэлементов и устанавливают на трех штангах на участках протяженностью, в два раза большей размера локального измерения плотности, для представления профиля сопротивления на заданном участке двумя функциями Уолша-Адамара формируют пространственную модуляцию двух подэлементов каждого чувствительного элемента продольной петлевой укладкой проводов на участке, измеряют разность сопротивлений проводов вторичными измерительными преобразователями в аналоговом виде и преобразуют ее в цифровую форму, определяют перепад сопротивления на профиле и решением системы линейных алгебраических уравнений для трех чувствительных элементов каждого датчика определяют перепад давления на локальной измерительной базе для каждой из осей координат и по вертикали и локальную плотность жидкости, в частности морской воды ρ(ϕ, h) в точке на географической широте φ и глубине h по формуле
где g(ϕ, h)=978,049(l+0,005288sin2α-0,000006sin2 2ϕ-0,0003086h) [см/с]2,


ΔР - перепад давления на профиле j-го датчика,

 - сопротивление провода нулевого подэлемента i-го чувствительного элемента j-го датчика,
- сопротивление провода нулевого подэлемента i-го чувствительного элемента j-го датчика,
 - сопротивление провода первого подэлемента i-го чувствительного элемента j-го датчика,
- сопротивление провода первого подэлемента i-го чувствительного элемента j-го датчика,
 - сопротивление проводов 0 и 1 подэлемента i-го чувствительного элемента j-го датчика в начале шкалы,
- сопротивление проводов 0 и 1 подэлемента i-го чувствительного элемента j-го датчика в начале шкалы,
ΔНx, ΔHy, ΔНz - размеры локальных измерительных баз по осям координат, конструктивные величины, определяются градуировкой,
α1 - коэффициент термочувствительности,
β1 - коэффициент тензочувствительности,

для каждого датчика определяют перепад давления и локальную плотность жидкости, в частности морской воды в точке на географической широте ϕ и глубине h по формуле

где g(ϕ,h)=978,049(l+0,005288sin2α-0,000006sin22ϕ-0.0003086) [см/с]2,

j={x, у, z},

 - сопротивление провода первого подэлемента i-го чувствительного элемента j-го датчика,
- сопротивление провода первого подэлемента i-го чувствительного элемента j-го датчика,
 - сопротивление провода нулевого подэлемента i-го чувствительного элемента j-го датчика,
- сопротивление провода нулевого подэлемента i-го чувствительного элемента j-го датчика,
 - сопротивление проводов 0 и 1 подэлемента i-го чувствительного элемента j-го датчика в начале шкалы,
- сопротивление проводов 0 и 1 подэлемента i-го чувствительного элемента j-го датчика в начале шкалы,
ΔНх, ΔНy, ΔHz - конструктивные величины, определяются градуировкой,
D=α1α3β2(β3-β1)+α2α3β3(β2-β3)+α1α3β3(β1-β2),
αi - коэффициент термочувствительности,
βi - коэффициент тензочувствительности.
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЕЙ ТЕМПЕРАТУРЫ, ДАВЛЕНИЯ И ПЛОТНОСТИ В ЖИДКОСТИ | 2018 |
|
RU2682080C1 |
| Федотов Г.А | |||
| "Новая модификация гидростатического метода определения плотности морской воды | |||
| Фундаментальные проблемы современной гидродинамики", 2013, Т | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Жемков Е.И | |||
| "Метод и устройство гидростатического измерения плотности морской воды", Материалы 12 Международной науч.-техн | |||
| конф | |||
| "Современные | |||

