Предложение относится к контрольно-измерительной технике и может быть использовано для контроля распределений физико-механических параметров, характеризующих состояние длинномерных объектов. Под длинномерными объектами в данном случае понимаются защемленные и опертые пологие оболочки, один из характерных размеров (например, длина) которых значительно (на порядки) превосходит другой размер (например, ширину). Более строго, это оболочка, у которой угол между касательными плоскостями, проходящими через любые две точки срединной поверхности, достаточно мал.
К таким объектам прежде всего относятся защемленные несущие поверхности - крылья, горизонтальное и вертикальное оперение самолетов, винтовые лопасти вертолетов, подводные крылья судов, а также опертые несущие поверхности - железнодорожные и автомобильные мосты, крыши и козырьки зданий.
Известно техническое решение, описанное в патенте RU 2348916 «Система контроля прочностных свойств крыла летательного аппарата» авторов Устинова В.В., Кашковского В.В., Полуэктова С.П. и Желтухина А.С., опубликованном 10 марта 2009 г. Это изобретение относится к контрольно-измерительной технике, в частности, крыла самолета и может быть использовано для контроля его прочностных свойств. Задача, на решение которой направлено заявляемое решение, заключается в повышении достоверности контроля прочностных свойств крыла летательного аппарата и предотвращении разрушения крыла в полете.
Поставленная цель в данном изобретении достигается путем измерения вибраций консоли крыла непосредственно в полете. Устройство включает в себя три акселерометра, коммутатор аналоговых сигналов для подключения акселерометров к аналогово-цифровому преобразователю, аналогово-цифровой преобразователь, три параллельных регистра, два сумматора, два запоминающих устройства, устройство управления и счетчик модификации адреса. Акселерометры устанавливаются на правой, левой консолях крыла и в центре масс летательного аппарата для параметрического оценивания жесткости крыла на изгиб в процессе летной эксплуатации. Сигналы с акселерометров поступают на устройство для записи. На земле происходит вычисление и оценка частот собственных изгибных колебаний левого и правого крыла. Результаты оценки накапливаются по множеству в группе обслуживания средств объективного контроля для статистической оценки снижения жесткости крыла на изгиб в процессе эксплуатации. Технический результат заключается в возможности контроля прочностных свойств путем измерения вибраций консоли крыла непосредственно в полете и в повышении достоверности контроля.
Это устройство, как и положенный в его основу способ контроля состояния длинномерного объекта имеют низкую точность контроля геометрии (деформаций) крыла, поскольку перемещения несущей поверхности измеряются с помощью акселерометра, установленного только в одной точке - конце каждого крыла.
Также известно техническое решение, описанное в патенте RU 2552222 «Способ измерения нагрузок, действующих на крыло летательного аппарата в полете» авторов Рогозенкова В.Н., Пантелеева М.М. и Яковлева Ю.А., опубликованном 20 февраля 2005 г.
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения нагрузок, действующих на крыло летательного аппарата в полете. Способ заключается в измерении крутящих моментов и перерезывающих сил с помощью тензодатчиков, размещенных в поперечных сечениях по размаху крыла, и измерении изгибающих моментов с помощью тензодатчиков, размещенных на верхней и нижней поверхностях крыла в зонах переднего и заднего лонжеронов крыла, подключенных в регистрирующей аппаратуре, отличающийся тем, что, с целью повышения точности определения напряженно-деформированного состояния крыла, крутящие моменты и перерезывающие силы в сечениях крыла измеряют с помощью тензодатчиков, размещенных на стенках переднего и заднего лонжеронов по нейтральным осям лонжеронов под углом 45° к плоскостям поперечных сечений крыла.
Главным недостатком этого, как и предыдущего технического решения, также является низкая точность измерения распределений нагрузок и деформаций крыла, поскольку их измерения производятся с помощью тензодатчиков только в нескольких точках крыла.
Известно также техническое решение, описанное в патенте RU 2141102 «Диагностическая система с оптическими датчиками (варианты)» авторов Данфи Джеймса P. (US) и Фалковича Кеннита П. (US), опубликованном 10 ноября 1999 г. В этом изобретении система используется для детектирования механических деформаций и перепадов температур. Система включает перестраиваемый узкополосный источник светового излучения, генерирующий световое излучение с переменной длиной волны, направляя его в светопроводящее волокно. По длине волокна расположены отражательные датчики, например, типа решеток Брэгга. Датчики пропускают световое излучение с длиной волны, соответствующей пропускным минимумам этих датчиков и изменяющейся под влиянием действующего на них возмущения. Контур перестройки длины волны управляет перестраиваемым источником света, обеспечивая сканирование генерируемого светового излучения в заранее определенной области длин волн с целью индивидуального освещения каждого датчика светом с длиной волны, соответствующей его пропускному минимуму. Мощность этого пропускаемого датчиками светового излучения преобразуется детектором в электрический сигнал, который обрабатывается контуром обработки сигналов. Контур обработки сигналов выявляет провалы профиля мощности светового излучения, воспринятого детектором, вырабатывает выходные сигналы, несущие информацию о параметрах возмущения, действующего на каждый датчик. Система может быть разомкнутой без обратной связи для измерения статических деформаций или замкнутой с обратной связью для отслеживания изменения статических деформаций и измерения динамических деформаций. Система может также применяться по схеме Фабри-Перо, обеспечивая при этом очень высокую чувствительность к деформациям. Система может переключаться на работу в режиме отражения или режиме пропускания светового излучения датчиками. Основными недостатками указанной системы являются ее низкая точность и селективность контроля вследствие измерения локальных механических деформаций, например, только в зоне созданной с помощью отрезка оптоволокна решетки Брэгга, а не распределения кривизны всей контролируемой поверхности.
Наиболее близким по технической сущности к заявленному здесь техническому решению является изобретение, описанное в патенте SU 1742615 «Способ контроля состояния длинномерного объекта и устройство для его осуществления» авторов Михеева С.М., Земерова В.Н. и Елшанского П.В., опубликованном 23 июня 1992 г. Наиболее полное описание этого изобретения с подробным изложением доказательств его осуществимости и физико-математических основ содержится в следующих опубликованных зарубежных патентах-аналогах этих же авторов: WO 1988008960 А от 17.11.1988; ЕР 314813 А от 10.05.1989; US 4995267 А от 26.02.1991 и др.
В указанном патенте РФ представлен способ контроля состояния длинномерного объекта, заключающийся в том, что в зоне контроля размещают протяженный канал передачи волновой энергии, измеряют параметры последней и по ним определяют физико-механические данные о состоянии объекта и их распределение в зоне контроля, отличающийся тем что, с целью повышения точности контроля и расширения диапазона данных, канал передачи волновой энергии выполняют в виде волновода, фиксируют моды колебаний указанной энергии, формируют по крайней мере одну из них в качестве опорно-информативной, с ее учетом выделяют из указанных мод наиболее информативные по указанным физико-механическим данным и измеряют параметры каждой из них. За параметры мод принимают амплитудно-фазочастотные характеристики их передачи по волноводу и реакцию этих характеристик на изменение формы, структуры объекта и окружающих давления и температуры.
Устройство для контроля состояния длинномерного объекта, содержащее источник модулированной волновой энергии, канал передачи волновой энергии и демодулятор, отличающееся тем, что с целью повышения точности контроля оно снабжено двумя пространственными фильтрами, один из которых включен между выходом источника модулированной волновой энергии и входом канала передачи волновой энергии, а второй пространственный фильтр - между входом демодулятора и выходом канала передачи волновой энергии, который выполнен в виде многомодового протяженного волновода прямоугольного или круглого сечения или их сочетаний, а демодулятор выполнен в виде подключенных к выходам второго пространственного фильтра двух синхронных детекторов, интегратора, подключенного к выходу одного из них, и связанного с выходами интегратора, второго синхронного детектора и операционного усилителя. Дополнительно устройство, описанное выше, снабжено гетеродинным преобразователем частот сигналов, включенным между выходами второго пространственного фильтра и входами синхронных детекторов.
Развитием изобретения, описанного в патенте SU 1742615, является патент SU 1791703 на дополнительное изобретение «Способ контроля состояния длинномерного объекта» авторов Михеева С.М., Земерова В.Н. и Елшанского П.В., опубликованном 30 января 1993 г. В этом патенте с целью повышения достоверности контроля напряженно деформированного состояния протяженной оболочки, поверхность оболочки разбивают на произвольные элементы, площадь которых не превышает разрешающей способности метода контроля, волновод произвольным образом размещают по периметрам указанных элементов и жестко закрепляют на контролируемой оболочке, по сигналу на выходе волновода определяют распределение кривизны в плоскостях, проходящих через оси участков волновода и перпендикулярных поверхности оболочки, определяют по ним распределение главных кривизн по всем элементам оболочки, которое используют в качестве физико-механических данных о состоянии оболочки, сравнивают его в заранее заданным распределением главных кривизн и по результатам сравнения оценивают состояние протяженной оболочки.
Основными недостатками указанных изобретений являются узкие функциональные возможности и низкая достоверность способа контроля и устройства для его осуществления из-за низкой точности и селективности контроля вследствие отсутствия конкретных указаний об осуществлении на практике этого технического решения для контроля состояния пологой оболочки в виде защемленной несущей поверхности.
Цель настоящего изобретения (группы технических решений, связанных между собой единым изобретательским замыслом) является разработка такого способа контроля состояния длинномерного объекта и такого устройства для его осуществления, которые за счет конкретных конструктивно-технологических указаний исполнения и размещения волновода, выбора и обоснования характеристик взаимодействия опорно-информативной и измерительной мод в волноводе, а также созданных алгоритмов восстановления распределения кривизны образующей поверхности по измеренным интегральным кривизнам ее участков, позволили бы повысить точность и селективность контроля состояния пологой оболочки в виде защемленной несущей поверхности.
Технический результат в отношении объекта изобретения - способа достигается тем, что в соответствии с предложенным способом контроля состояния длинномерного объекта
с помощью волновода, выполненного в виде информационно-измерительного оптоволоконного кабеля, для измерения интегральной кривизны образующей поверхности в указанном кабеле по всей его длине L устанавливают по крайней мере одну оптоволоконную пару, которая содержит два параллельно протянутых полимерных или кварцевых оптоволокна цилиндрической формы, одно из указанных волокон является опорно-информационным каналом, а второе - измерительным каналом с одинаковыми показателями преломления, помещенных в общую светоотражающую оболочку, заполненную иммерсионной жидкостью, при этом сам информационно-измерительный оптоволоконный кабель жестко закрепляют на поверхности таким образом, чтобы плоскость, проходящая через продольные оси обоих оптоволокон была перпендикулярна плоскости несущей поверхности, затем генерируют последовательность когерентных оптических импульсов длительностью Т=L/V, где V - скорость света в оптоволокне, с шириной спектра порядка 1/Т и временным интервалом T1 между импульсами, усиливают и подают указанные импульсы на вход оптоволокна опорно-информационного канала, получают оптические сигналы на выходах двух каналов указанного кабеля и осуществляют их фотопреобразование в электрические сигналы, затем синхронно детектируют, усиливают и преобразуют эти электрические сигналы в цифровую форму, далее после их обработки в вычислительном устройстве по измеренной интегральной кривизне образующей несущей поверхности и известной жесткости производят масштабное преобразование этой интегральной кривизны в пространственно-временные распределения кривизны образующей поверхности, а также моментов, сил и напряжений, действующих вдоль оси кабеля, а затем сравнивая полученные физико-механические характеристики текущего состояния несущей поверхности с заранее заданными характеристиками, принимают решение о ее состоянии. Способствует достижению технического результата то, что:
- для повышения точности и снижения энергозатрат на измерения интегральной кривизны образующей несущей поверхности за счет создания оптоволоконной триады измерительной функции Уолша-Ддамара в информационно-измерительном оптоволоконного кабеле в дополнение к двум параллельно протянутым оптоволокнам помещают третье оптоволокно также цилиндрической формы и с таким же показателем преломления, которое выполняет функции второго измерительного канала, при этом все три канала, продольные оси которых параллельны между собой и оси кабеля, расположены в одной плоскости, а оптоволокно опорно-информационного канала помещено между оптоволокнами измерительных каналов;
- для создания каждой последующей, размещаемой параллельно друг другу в информационно-измерительном оптоволоконном кабеле, триады оптоволокон измерительной функции Уолша-Адамара, кроме нулевой, в соответствии с ее номером в каждой триаде оптоволокон устанавливают на определенном расстоянии в разрез оптоволокон измерительных каналов оптические кросс-коммутаторы, с помощью которых через определяемые номером функции Уолша-Адамара отрезки вдоль оси информационно-измерительного оптоволоконного кабеля меняют местами верхнее и нижнее оптоволокна измерительных каналов;
- на основе обработки оптических сигналов, поступивших с выходов всех оптоволоконных триад Уолша-Адамара, установленных в информационно-измерительном оптоволоконном кабеле, преобразованных в электрические сигналы, а затем после детектирования и усиления в цифровую форму, соответствующих коэффициентам разложения распределения кривизны образующей несущей поверхности по функциям Уолша-Адамара, с помощью специального алгоритма восстанавливают само распределение кривизны образующей этой поверхности вдоль оси кабеля;
- для контроля кривизны поверхности, например, крыла самолета длиной от 4 м до 10 м, информационно-измерительный оптоволоконный кабель закрепляют на верхней поверхности консоли крыла от борта самолета до конца крыла вдоль оси его максимальной изгибной жесткости таким образом, чтобы плоскость, проходящая через оси трех взаимодействующих оптоволокон каждой триады кабеля была перпендикулярна поверхности консоли крыла, а число триад оптоволокон, расположенных в информационно-измерительном оптоволоконном кабеле параллельно друг другу и реализующих измерения интегральных кривизн участков образующей поверхности по первым трем функциям Уолша-Адамара, устанавливают также не менее трех;
- для осуществления контроля состояния крыла самолета в полете, вторую половину информационно-измерительного оптоволоконного кабеля закрепляют на нижней поверхности консоли крыла вдоль оси его максимальной изгибной жесткости от конца консоли до борта самолета, при этом в конце крыла в разрез между верхней и нижней частями указанного кабеля в опорно-информационых каналах всех триад устанавливают линию задержки, за счет которой вводят временную задержку оптических сигналов в кабеле;
- для контроля кривизны поверхности, например, крыла самолета длиной от 10 м до 50 м, информационно-измерительный оптоволоконный кабель, состоящий из трех последовательно соединенных частей, закрепляют на верхней поверхности консоли крыла: первую часть - от борта самолета до конца консоли крыла вдоль оси его первого лонжерона, вторую часть кабеля - вдоль кромки торца крыла от первого до второго или третьего лонжерона, а третью часть кабеля - вдоль оси второго или третьего лонжерона от торцевой кромки крыла до борта самолета, причем в каждом месте поворота кабеля на 90 градусов в разрез кабеля в опорно-информационых каналах всех триад вводят временную задержку оптических сигналов, а число триад оптоволокон, а число триад оптоволокон, расположенных параллельно друг другу в кабеле и реализующих измерения интегральных кривизн участков образующих поверхности крыла по первым шести функциям Уолша-Адамара, устанавливают также не менее шести;
- получение распределения кручения вокруг продольной оси крыла самолета осуществляют по измеренным распределениям кривизны не менее двух образующих поверхности крыла;
- для контроля усталостной прочности крыла фиксируют количество циклических изменений распределений кривизны и кручения его поверхности во времени;
- для контроля состояния крыла и определения мест возникновения скрытых дефектов фиксируют изменения распределений изгибной и крутильной жесткостей крыла при одинаковых нагрузках в процессе эксплуатации самолета.
Технический результат в отношении объекта изобретения -устройства достигается тем, что устройство для контроля состояния длинномерного объекта содержит источник модулированной волновой энергии, выполненный в виде импульсного когерентного лазера, подключенного через первый пространственный фильтр, содержащий оптический усилитель и оптический разъем, на вход канала передачи волновой энергии, созданного в виде информационно-измерительного оптоволоконного кабеля, содержащего не менее трех триад оптоволокон, реализующих первые три функции Уолша-Адамара, каждая из триад содержит три цилиндрических кварцевых стекловолокна, два из которых являются измерительными, а одно - опорно-информационным каналом с одинаковыми показателями преломления, при этом все три стекловолокна, продольные оси которых параллельны между собой и оси кабеля, помещены в общую светоотражающую оболочку, заполненную иммерсионной жидкостью, и расположены в одной вертикальной плоскости, перпендикулярной плоскости поверхности консоли крыла, а оптоволокно опорно-информационного канала помещено между оптоволокнами измерительных каналов, в свою очередь все три оптоволоконные триады Уолша-Адамара содержат установленные в разрез оптоволокон кабеля через расстояния, определяемые номером функции Уолша-Адамара, кросс-коммутаторы, которые вместе с оптоволокнами размещены в кабеле и отделены твердым диэлектриком с армирующими элементами от главной защитной оболочки информационно-измерительного оптоволоконного кабеля, а выход канала передачи волновой энергии, в данном случае - выходы всех трех оптоволоконных триад кабеля, также через оптический разъем и второй пространственный фильтр, реализованный в виде блока фотоприемников, подключены к входу демодулятора, выход которого соединен с дополнительно установленными, последовательно соединенными блоком аналого-цифровых преобразователей (АЦП), вычислительным устройством и видеотерминалом, причем второй вход вычислительного устройства соединен с выходом дополнительно установленной буферной памяти, а второй выход вычислительного устройства через блок цифро-аналоговых преобразователей (ЦАП) подключен к второму входу демодулятора.
Способствует достижению технического результата то, что:
- первый оптический разъем содержит разветвитель оптических сигналов, соединяющий выход оптического усилителя со всеми входами опорно-информационных каналов информационно-измерительного оптоволоконного кабеля;
- для снижения затухания оптических сигналов в информационно-измерительном оптоволоконном кабеле используют многомодовые кварцевые стекловолокна с диапазоном пропускаемых длин волн (850-1550) нм;
- в качестве кросс-коммутатора используют оптический трехканальный микроразъем;
- оптическая линии задержки выполнена в виде набора плоскопараллельных пластин из кварцевого стекла, например, по принципу эшелонов Майкельсона;
- в качестве иммерсионной жидкости используют, например, водный раствор глицерина с добавлением спирта или различные высококипящие и низкозамерзающие природные и синтетические масла, а также кремнийорганические жидкости;
- для предотвращения разрывов информационно-измерительного оптоволоконного кабеля при температурных изменениях размеров поверхности контролируемого крыла самолета в конструкцию указанного кабеля между светоотражающими оболочками оптоволоконных триад и последней защитной оболочкой вводят твердый диэлектрик, например, полиэтилен, армированный кевларовыми нитями или стеклонитями, а также боковыми стержнями, например, из стеклопластика;
- для защиты от ударов и снижения сил раздавливающего воздействия, а также повышения точности закрепления на контролируемой поверхности крыла за счет правильной ориентации информационно-измерительного оптоволоконного кабеля в пространстве его изготавливают с прямоугольным профилем поперечного сечения последней защитной оболочки;
- для защиты информационно-измерительного оптоволоконного кабеля от резких изменений температуры окружающей среды, последнюю защитную оболочку указанного кабеля с прямоугольным профилем поперечного сечения изготавливают из термостойкого, безгалогенного компаунда;
- информационно-измерительный оптоволоконный кабель жестко закрепляют на поверхности консоли крыла, например, с помощью клея холодного отвердевания Х60 или циакрина ЭО;
- в состав демодулятора с пространственным разделением каналов, в соответствии с количеством оптоволоконных триад используемых функции Уолша-Адамара, включено такое же количество независимых однотипных схем синхронного детектирования оптических сигналов с выхода блока фотоприемников, в каждую из которых входят три операционных усилителя, первый из которых подключен к выходу фотоприемника опорно-информационного канала, а второй и третий усилители к выходам фотоприемников измерительных каналов, причем выходы всех трех усилителей являются входами четвертого операционного усилителя, выполняющего функции усилителя разностного сигнала, выход которого является выходом схемы синхронного детектирования и одновременно входами пятого и шестого операционных усилителей, выходы которых в свою очередь соответственно подключены к вторым входам второго и третьего усилителей для изменения их коэффициентов усиления по сигналу с входа балансировки каждой схемы синхронного детектирования, подключенного ко вторым входам пятого и шестого усилителей, в свою очередь все входы балансировки соединены с выходом блока ЦАП;
- оптический усилитель в источнике модулированной волновой энергии выполнен полупроводниковым или оптоволоконным, например, на основе легированных эрбием или иттербием оптических волокон;
- блок фотоприемников выполнен на основе p-i-n или лавинных фотодиодов с трансимпедансными усилителями;
- буферная память выполнена в виде оптического накопителя, изготовленного по технологии «Blu-ray».
В дальнейшем изобретение поясняется конкретным примером его выполнения и прилагаемыми чертежами, на которых:
- фиг. 1 изображает односторонне закрепленную несущую поверхность, подвергающуюся действию внешних сил;
- фиг. 2 - профиль несущей поверхности с учетом погрешностей его восстановления;
- фиг. 3 - недеформированную и деформированную несущую поверхность с указанием ее главных кривизн;
- фиг. 4 - максимальное дифференциальное укорочение элемента Δz несущей поверхности вдоль координаты z;
- фиг. 5a, b - профиль несущей поверхности в сечении xoiz плоскостью xiyz и распределение кривизны Kz вдоль оси z;
- фиг. 6 - влияние измерений пространственного импульса кривизны с конечной полосой измерительного инструмента на восстановление кривой сечения несущей поверхности;
- фиг. 7 - форму восстановленной кривой сечения несущей поверхности, подобную истинной по характеру распределения прогибов;
- фиг. 8 - графики первых шести функций Уолша, упорядоченных по Адамару;
- фиг. 9а, b, с, d - поперечные сечения ИВЛ и информационно-измерительного оптоволоконного кабеля с триадами Уолша-Адамара;
- фиг. 10а, b, с, d - фотографии экспериментальной установки для реализации заявленного способа контроля;
- фиг. 11 - схему многополюсника с матрицей [S] и выделеными парами клемм входа и выхода;
- фиг. 12 - сигналы на выходе измерительного и опорного каналов ИВЛ, имеющие ступенчатую периодическую структуру;
- фиг. 13 - структурную схему устройства для контроля состояния несущей поверхности в виде крыла самолета;
- фиг. 14a, b - конструктивное выполнение триад стекловолокон, реализующих «нулевую» и «первую» функции Уолша-Адамара;
- фиг. 15 - электрическую схему блока фотоприемников и демодулятора;
- фиг. 16 - зависимость напряжения на выходе демодулятора от кривизны стальной пластины в экспериментальной установке;
- фиг. 17 - кривые прогиба защемленной стальной пластины при различных нагрузках;
- фиг. 18 - схему закрепления информационно-измерительного оптоволоконного кабеля на поверхности крыла с двумя лонжеронами.
Приведем обоснование реализуемости предложенного технического решения на примере контроля геометрии защемленной несущей поверхности в виде крыла самолета.
Известно, что в полете и при рулении по неровностям аэродрома могут возникнуть свободные (собственные) и, чаще всего, несвободные колебания частей планера. Собственные колебания крыла большого удлинения, заделанного в фюзеляж, характеризуются изгибными и крутильными колебаниями. Эти колебания совместны, так как линии центров тяжестей и жесткостей крыла обычно не совпадают. Возникновение изгибных колебаний вызовет крутильные и наоборот. Частоты собственных крутильных колебаний крыла на порядок больше, чем соответственные частоты изгибных колебаний. Для контроля геометрии крыла достаточно рассмотреть только измерение распределения кривизны поверхности крыла в вертикальной строительной плоскости самолета. Поэтому далее будем считать эти изгибные колебания раздельными, т.е. независящими от крутильных колебаний крыла.
Осуществим постановку задачи контроля несущей поверхности с использованием известных данных о параметрах крыла и выбранной для экспериментальных исследований его механических (статических) характеристик защемленной прямоугольной стальной пластины.
Односторонне закрепленная пластина, моделирующая несущую поверхность 1, подвергающаяся действию внешних сил, изображена на рисунке фиг. 1.
По оси х поверхность 1 жестко защемлена. Силы Fl, F2, … Fn действуют вдоль оси y. Скручивающие моменты действуют вдоль оси z. Если силы и моменты отсутствуют (в том числе и сила тяжести), поверхность 1 занимает положение ox1z1 (фиг. 1). При наличии внешнего воздействия точка поверхности  переходит в точку M(xyz) и исходная плоская поверхность 1 переходит в деформированную поверхность 1 (фиг. 1).
переходит в точку M(xyz) и исходная плоская поверхность 1 переходит в деформированную поверхность 1 (фиг. 1).
В результате измерений необходимо с требуемой точностью определить геометрию данной поверхности 1 и ее положение относительно исходного состояния. По этой геометрии на основании известных уравнений механики определяются величины и распределения действующих сил и моментов на несущую поверхность 1.
Формально, для каждого конкретного состояния необходимо измерить матрицу оператора, переводящего совокупность точек  в совокупность точек Mi. На эти точки «натягивается» контролируемая поверхность. За счет различного рода ошибок поверхность 1 после восстановления будет лежать в некотором слое d (фиг. 2) и ее прогибы hi будут определяться с ошибкой Δhi.
в совокупность точек Mi. На эти точки «натягивается» контролируемая поверхность. За счет различного рода ошибок поверхность 1 после восстановления будет лежать в некотором слое d (фиг. 2) и ее прогибы hi будут определяться с ошибкой Δhi.
Для организации измерений геометрии поверхности необходимо иметь следующие начальные условия:
- габариты плоскости х1, z1 поверхности 1 (фиг. 1);
- максимальное значение прогиба (отклонения по оси y) на свободном краю (z0÷z1)hmax;
- минимальное значение прогиба на свободном краю, которое необходимо измерять hmin;
- ширину слоя ошибки d;
- ориентировочное (лучше максимально возможное) число N1 вариаций (изменений знака) прогиба поверхности 1 относительно линии радиус-вектора  (фиг. 2), соединяющей точки защемления поверхности 1 и ее свободного края;
(фиг. 2), соединяющей точки защемления поверхности 1 и ее свободного края;
- число вариаций прогиба N2 в поперечном сечении х, y плоскости;
- быстродействие измерений Δt;
- требования к форме представления выходной информации измерений.
Примем следующие технические характеристики для проведения обоснования созданного изобретения:
z1=4000 мм, х1=2000 мм; hmax=700 мм; hmin - 10 мм; d=10 мм; N1=3; N2=0; Δt - порядка нескольких секунд, поскольку нагрузки статические. Изображение кривизны поверхности 1 при выборе ее сечений с координатами относительно плоскости xoz должно быть представлено в графическом виде.
Из этих условий определяются основные требования к измерительной системе.
По условиям предварительных экспериментов длина измерительной волноводной линии (ИВЛ) может достигать 50 метров (максимальной длины контролируемого крыла самолета). Динамический диапазон:
 .
.
Разрешающая способность измерений:
по  ; по
; по  .
.
Остальные требования уточним в процессе решения всей задачи контроля геометрии защемленной пологой оболочки в виде несущей поверхности 1.
Сформулируем дифференциально-геометрические основы проводимых измерений кривизны поверхности 1.
Контролируемая несущая поверхность 1 представляет собой гладкую (без изломов) поверхность, характеризующуюся текущими главными значениями кривизны  и
и  в точках Mi(xiyizi), начальными значениями
в точках Mi(xiyizi), начальными значениями  ,
,  и граничными значениями Koz(z=0), Kox(z=0), которые постоянны для данного цикла измерений (фиг. 3). Координаты х, y, z в общем случае афинные. В частном случае плоской исходной поверхности 1 Koz=Kox=0.
и граничными значениями Koz(z=0), Kox(z=0), которые постоянны для данного цикла измерений (фиг. 3). Координаты х, y, z в общем случае афинные. В частном случае плоской исходной поверхности 1 Koz=Kox=0.
В общем случае знание распределения KZ и Kx по поверхности 1 позволяет на основе решения интегро-дифференциальных геометрических уравнений построить саму поверхность 1. Однако на практике численные методы решений требуют определенного количества дополнительных исходных данных, которые не следуют из общей теории дифференциальной геометрии. Задачу можно существенно упростить, если ввести ряд условий, следующих из физической природы контролируемого объекта -несущей поверхности.
Выделим главные условия, не приводя здесь строгих обоснований, которые следуют из теории инфинитезимального и кватернионного исчислений.
Первое условие - малые деформации поверхности 1. Это условие формулируется следующим образом

Физически это означает, что максимальное дифференциальное укорочение элемента Δz вдоль координаты z имеет третий порядок малости по отношению к величине Δz. Сказанное пояснено на фиг. 4.
Условие (1) эквивалентно условию
 I
I
где 0 (Δz)3 - величина порядка (Δz0)3; Δz0 начальное значение Δz.
Аналогичное условие должно выполняться и по координате х для кривизны Kx.
Второе условие - конечное число вариаций кривизны. Оно формулируется следующим образом

где значения N, М - конечны и натуральны. Условие пояснено на фиг. 5, где изображен профиль поверхности 1 в сечении xoi z плоскостью xiyz и распределение кривизны Kz вдоль z. В приведенном примере N=1.
При выполнении первого условия справедливы следующие выражения для координаты произвольной точки поверхности M(xiyzi) через распределения  ;
;  :
:



где ε,η- независимые переменные интегрирования; Kz(η), Kx(η) - распределения главных кривизн вдоль координаты η∈zoi при х=xoi исходной системы координат, в данном случае плоскости xoz (фиг. 1).
Если дифференциальные деформации в поперечном сечении z=zoi, х малы, так что  , то приращениями координаты xoi можно пренебречь и выражения (4) упрощаются:
, то приращениями координаты xoi можно пренебречь и выражения (4) упрощаются:
Из выражений (4) и (5) следует, что координаты точек, на которые «натягивается» деформируемая поверхность 1, определяются интегралами от главных кривизн этой поверхности 1. Отсюда следует методика измерений.
Обратимся ко второму условию (3). Это условие позволяет оценить верхнюю пространственную частотную границу измерений кривизны. Здесь существует следующая тонкость. Несмотря на то, что поверхность 1 в процессе измерений является гладкой, распределение главных кривизн принципиально включает ступенчатые функции. Это иллюстрируется простейшим примером на фиг. 5. Известно, что точное восстановление ступенчатой функции по измерениям инструментом с конечной полосой пропускания или с гладкой формой аппаратной функции является в общем случае некорректной задачей. Вопросы точности в этом случае являются проблематичными без априорных знаний поведения измеряемой величины. Поэтому существенную роль играет выбор алгоритмов организации измерений. Ниже приведем сравнение двух алгоритмов, дающих, как будет показано, наилучшие приближения в двух различных целевых решениях. А именно:
- построение поверхности 1 с минимальным отклонением от истинной формы;
- построение поверхности 1 с минимальным отклонением от истинных координат "концевых" точек относительно защемленных точек поверхности 1 (фиг. 1).
Сочетание этих алгоритмов позволяет оптимизировать задачу определения геометрии поверхности 1 по двум целевым решениям.
Сформулируем вышеуказанные алгоритмы восстановления контролируемой поверхности 1 и требования к точности измерений.
Примем, по крайней мере для экспериментального контролируемого образца поверхности 1, модель, описываемую выражением (5). Как показывают оценочные расчеты, эта модель работает с достаточной точностью для реализации требований принятого технического задания.
Допустим, что кривизна Kz(η) измерена с некоторой ошибкой δKz(η). После восстановления, координаты  и
и  будут определены со следующей зависимостью от δKz(η);
будут определены со следующей зависимостью от δKz(η);
Выражение (6) получается подстановкой в (5) Kz(η)=Kz(η)+δKz(η) и применения теоремы о среднем значении интеграла.
Из выражения (6) следует, что происходит накапливание ошибок по прогибу у пропорционально координате zt. На фиг. 6 показано влияние измерений пространственного импульса кривизны с конечной полосой измерительного инструмента на восстановление кривой 2 профиля сечения поверхности 1.
Более детальный анализ и расчеты показывают, что при непосредственном измерении кривизны и подстановке этих измерений в выражения (5) для восстановления кривой, происходит как бы растяжение масштаба вдоль кривой, приводящее к росту ошибки координаты прогиба у относительно начала отсчета z0=0. Однако форма восстановленной штриховой кривой 2 при этом остается подобной сплошной истинной кривой 2 по характеру распределения прогибов (фиг. 7).
Такой алгоритм восстановления назовем линейным, поскольку результаты измерений линейно складываются в процессе восстановления кривизны несущей поверхности.
Функционально этот алгоритм реализуется следующим образом. Задается или определяется аппаратная функция измерительной системы ƒ(η). По ней определяем передаточную частотную характеристику F(p) через преобразование Лапласа. Измеренная величина  будет определяться выражением
будет определяться выражением

Это уравнение свертки относительно неизвестной функции Kz(η). Оно может быть решено с заданной точностью организацией ядра уравнения ƒ(η) или в операторной форме

где F(p) - имеет известную обратную функцию.
Затем определяется функция  или в операторной форме
или в операторной форме

Затем вычисляются интегралы (5):
В первом приближении при малости Kz(η) все решение можнопровести в операторной форме. Пусть F-1(р) задается сходящимся рядом, например, Неймана
где ƒ(р)=1 - F(p), а |ƒ(р)|<1 везде.
Тогда:
где  - обратное преобразование Лапласа.
- обратное преобразование Лапласа.
Прогибы  определяются из (5) следующим образом
определяются из (5) следующим образом

где ⊗ - операция свертки.
Выражение (12) алгоритмизируется в программе вычислительного устройства при обработки сигнала по стандартным подпрограммам типа свертки. Таким образом, конечная точность линейного алгоритма связана с быстротой сходимости ряда обращения аппаратной функции измерительного инструмента.
Практически в предложенном способе контроля аппаратная функция определяется огибающей волнового пакета опорного сигнала. Для огибающей прямоугольной формы разложение ядра оптимально в смысле сходимости по сфероидальным функциям [Комаров И.В., Пономарев Л.И.,, Славянов С.Ю. Сфероидальные и кулоновские сфероидальные функции. -М.: Наука, 1976, с. 131-138], для гауссовой формы по полиномам Эрмита или по функциям параболического цилиндра.
Однако даже применение современных средств обработка сигнала не избавляет линейный алгоритм от свойств накапливания ошибок прогиба по длине поверхности 1.
Зададимся целью получить наиболее точные значения координат y; zi на свободном краю поверхности 1 относительно защемленного края. Для этой цели представим распределения кривизны KZ(η) на отрезке η∈zoi∈(0÷L), где L - длина по z недеформированной поверхности 1 в виде обобщенного ряда Фурье по некоторой полной системе ортонормальных функций ϕn(η):

По этой же системе разложим и распределение u(z):

Коэффициенты βm связаны с коэффициентами αn следующим образом

где

Коэффициенты qnm не связаны с измеряемым объектом и могут быть заранее заложены в алгоритм обработки измерений кривизны в вычислительном устройстве.
"Концевые" координаты zL и yL будут определяться выражениями:
Наличие интегралов в (16) не устраняет в общем случае погрешность накопления ошибки прогиба поверхности. Выберем в качестве базисной системы функций функции Уолша ϕn=Wal(n;θ), θ=η/L, широко применяемые в вычислительной технике. Первые шесть функций Уолша (поз. 3), упорядоченные по Адамару [Гоноровский И.С. Радиотехнические цепи и сигналы. 4-е изд.- М.: Радио и связь, 1986, с. 429-436], изображены на фиг. 8. По своему характеру они совпадают с функциями распределения кривизны, при разбиении сечения поверхности 1 на элементы с постоянной кривизной (фиг. 5).
Накапливание ошибок измерений прогиба по длине устраняется благодаря следующим свойствам функций Уолша.
Ортогональность с константой на L для всех n≠0:

где δ(0; n) - символ Кронекера.
Мультипликативность по порядку:

где n⊕m=k - сумма по модулю 2.
Инвариантность относительно тригонометрических преобразований:
cos[Wal(n; θ)⋅αn]=Wal(0; θ)cos αn,
sin[Wal(n; θ)⋅αn]=Wal(n; θ)sin αn.
Последнее свойство очевидно без доказательства. Эти свойства позволяют выражение (16) записать в виде:
где члены  и
и  образованы группами произведений, дающих по указанному выше свойству нулевой порядок результирующей функции Уолша.
образованы группами произведений, дающих по указанному выше свойству нулевой порядок результирующей функции Уолша.
Эти группы предварительно определяются в подпрограмме вычислительного устройства и закладываются в алгоритм обработки данных измерений также, как и коэффициенты qnm. В выражении (19) выделены члены, дающие основной вклад в вычисления zL и yL, определяемые амплитудой функции Уолша нулевого порядка. Максимальный порядок функций Уолша, который необходимо учитывать при измерениях, определяется натуральными числами N и М выражений (3).
Таким образом, второй - нелинейный алгоритм восстановления геометрии поверхности заключается в следующем. Измеряются коэффициенты разложения распределения Kz(η) по N функциям Уолша. Производится сначала операция <αn[qnm]=<βm, а затем операция, описанная выражением (15). Далее по выражениям (13) и (5) определяются  ,
,  ,
,  . Масштаб полученных кривых должен изменяться (например, по линейной экстраполяции) соответственно со значениями zL, yL и полученные данные выводятся на интерфейс вычислительного устройства, а затем на видеотерминал. Этот алгоритм назовем нелинейным. Точность алгоритма здесь определяется числом N функций Wal (m; θ), m∈N в предварительно составленной программе обработки измерений. Проведенные расчеты согласно принятым техническим требованиям показывают, что при измерениях кривизны поверхности 1 длиной 4000 мм=4 м необходимо учитывать три функции Уолша, а в обработке заложить 16 коэффициентов qnm.
. Масштаб полученных кривых должен изменяться (например, по линейной экстраполяции) соответственно со значениями zL, yL и полученные данные выводятся на интерфейс вычислительного устройства, а затем на видеотерминал. Этот алгоритм назовем нелинейным. Точность алгоритма здесь определяется числом N функций Wal (m; θ), m∈N в предварительно составленной программе обработки измерений. Проведенные расчеты согласно принятым техническим требованиям показывают, что при измерениях кривизны поверхности 1 длиной 4000 мм=4 м необходимо учитывать три функции Уолша, а в обработке заложить 16 коэффициентов qnm.
Определим требования к конструкции ИВЛ, используемой в экспериментальной установке со стальной пластиной, имитирующей несущую поверхность 1 в виде крыла самолета.
Особенность решаемой задачи состоит в том, что измерения кривизны производятся на сравнительно малых (порядка нескольких метров) длинах, при также малых (порядка нескольких миллиметров) отклонениях. Измеряемые кривизны при этом имеют величины порядка (10-5÷10-3) м-1. Как известно (см., например, Ваганов Р.Б. и др. Многомодовые волноводы со случайными нерегулярностями. - М.: Советское радио, 1972. С. 70), параметры, характеризующие взаимодействие волн в волноводах, например, коэффициент связи волн, линейно зависят от кривизны ИВЛ. Общую величину относительной мощности (см. там же), расходуемой на измерения на участке ИВЛ длиной ΔS, можно оценить как

где λ - длина волны несущего колебания; α - характерный размер волновода в плоскости изгиба; S - текущая координата; ΔS- разрешающая способность измерений вдоль S; g - безразмерный конструктивный коэффициент ≤1.
Чувствительность применяемой в экспериментальной установке аппаратуры составляет величину порядка 10-10 Вт.
Оценку реализуемости предлагаемого способа контроля приведем для λ=1,3-10-6 м; α=400⋅10-6 м; K=10-5 м;  ; ΔS - требуемое разрешение измерений по техническому заданию для макетного образца составляет 0,5 м. Тогда g≥10-1. Физический смысл коэффициента g - начальный уровень связи опорной и измерительной мод в ИВЛ при отсутствии деформирующих ее воздействий. Таким образом, для решаемой задачи необходимо обеспечить ИВЛ с начальной мощностью связи между стекловолокнами каналов 5 дб/м.
; ΔS - требуемое разрешение измерений по техническому заданию для макетного образца составляет 0,5 м. Тогда g≥10-1. Физический смысл коэффициента g - начальный уровень связи опорной и измерительной мод в ИВЛ при отсутствии деформирующих ее воздействий. Таким образом, для решаемой задачи необходимо обеспечить ИВЛ с начальной мощностью связи между стекловолокнами каналов 5 дб/м.
Исходя из использования в эксперименте оптоволоконных линий в ИК-диапазоне (λ=1,3 μk), в качестве основы выполнения ИВЛ использовалось кварцевое цилиндрическое оптоволокно диаметром d1=400 μk. Конструктивно ИВЛ выглядит так, как показано на фиг. 9а) - двухканальный вариант и фиг. 9b) -трехканальный вариант.
На фиг. 9а) изображен поперечный разрез измерительной волноводной линии (ИВЛ), в которой два параллельно идущих стекловолокна 4 и 5, расположены на расстоянии α в плоскости yoz, совпадающей с плоскостью прогиба поверхности консоли крыла 8 самолета. Внутренняя полость между этими стекловолокнами 4 и 5 заполнена иммерсионной жидкостью 6 (в экспериментальной установке-водным раствором глицерина), помещенными вместе в светотражающую оболочку 7.
Иммерсионную жидкость 6, (см., например, Материал из Википедии - свободной энциклопедии https://ru.wikipedia.org/wiki/Иммерсия-микроскопия), выбирают с показателем преломления равным или большим показателя преломления стекловолокон 4 и 5. Исходящие от одной точки стекловолокна 4 опорно-информационного канала лучи проходят без преломления и рассеивания через иммерсионную пленку и «принимаются» стекловолокном 5 измерительного канала. В этом случае числовая апертура увеличивается, а предел разрешения уменьшается. Возникающие на поверхностях покровного стекла оптоволокон 4 и 5 паразитные отражения существенно меньше, нежели у «сухих», а в некоторых случаях паразитные переотражения могут быть полностью устранены. Это улучшает контраст изображения и позволяет поднять освещенность стекловолокна 5 без вредного влияния на излучение. Толщина слоя жидкости между стекловолокнами 4 и 5 может меняться, и за счет этого можно в некоторых пределах изменять компенсацию сферической аберрации и коэффициент оптической связи. С учетом того что рабочий диапазон температур авиационных электронных приборов обычно рассматривается в интервале -50…+50°С, в качестве жидкостей используют неводные системы, такие как различные высококипящие и низкозамерзающие природные и синтетические масла, а также кремнийорганические жидкости.
Далее представлены дополнительные технические предложения по усовершенствованию заявленного способа контроля состояния защемленной несущей поверхности в виде крыла самолета, позволяющие наиболее эффективно реализовать способ для достижения поставленной цели.
Для повышения точности и снижения энергозатрат на измерения интегральной кривизны образующей несущей поверхности 1 за счет применения аппаратной измерительной функции Уолша-Адамара в ИВЛ в дополнение к двум параллельно протянутым оптоволокнам 4 и 5 помещают третье оптоволокно 5 также цилиндрической формы (фиг. 9b) и с таким же показателем преломления, которое выполняет функции второго измерительного канала, при этом все три канала, продольные оси которых параллельны между собой и оси ИВЛ, расположены в одной плоскости, а оптоволокно 4 опорно-информационного канала помещено между оптоволокнами 5 измерительных каналов. В экспериментальной установке ИВЛ закреплена по средней линии образующей поверхности стальной пластины от точки защемления до точки свободного края этой пластины, что показано на фиг. 10b. Создание такой триады оптоволокон позволяет не только аппаратно реализовать «нулевую» функцию Уолша-Адамара (поз. 3 фиг. 8), но и создать возможность снижения затрат энергии на измерения интегральной кривизны несущий поверхности 1 за счет усиления разностного сигнала с выходов оптоволокон 5 двух измерительных каналов.
Для создания каждой последующей, размещаемой параллельно друг другу в информационно-измерительном оптоволоконном кабеле, триады оптоволокон измерительной функции Уолша-Адамара, кроме нулевой (фиг. 14а), в соответствии с ее номером в каждой триаде оптоволокон устанавливают на определенном расстоянии в разрез оптоволокон измерительных каналов оптические кросс-коммутаторы (фиг. 14b), с помощью которых через определяемые номером функции Уолша-Адамара отрезки вдоль оси информационно-измерительного оптоволоконного кабеля меняют местами верхнее и нижнее оптоволокна 5 измерительных каналов. На фиг. 9с) и d) показаны поперечные сечения информационно-измерительного оптоволоконного кабеля соответственно с первыми тремя (фиг. 9с) и шестью (фиг. 9d) функциями Уолша-Адамара, реализованными с помощью оптоволоконных триад и размещенных в них кросс-коммутаторов 19. Здесь показаны оптоволокна 4 опорно-информационного и 5 измерительных каналов каждой триады, помещенных вместе с иммерсионной жидкостью 6 в светоотражающую оболочку 7, которая отделена твердым диэлектриком 9 от последней защитной оболочки 10 информационно-измерительного оптоволоконного кабеля 18 (фиг. 13 и 18), закрепленного на поверхности консоли 8 крыла самолета.
На основе обработки оптических сигналов, поступивших с выходов всех оптоволоконных триад Уолша-Адамара, установленных в информационно-измерительном оптоволоконном кабеле 18, преобразованных в электрические сигналы, а затем после детектирования и усиления в цифровую форму, соответствующих коэффициентам разложения распределения кривизны образующей несущей поверхности 1 по функциям Уолша-Адамара, с помощью представленных в данном описании линейного или нелинейного алгоритмов восстанавливают само распределение кривизны образующей этой поверхности 1 вдоль оси кабеля 18.
На фиг. 10 а, b, с, d представлены фотографии основных частей экспериментальной установки, созданной для реализации заявленного способа контроля и подтверждения осуществимости всех входящих в способ и устройство технических решений.
На фиг. 10 а) показана основная несущая рама установки с односторонне закрепленным стальным листом. На верхней площадке рамы размещены оптические приборы и импульсный когерентный лазер, излучение которого с помощью набора линз возбуждает стекловолокно опорно-информационного канала ИВЛ, закрепленной по средней линии поверхности листа (фиг. 10b). На фото фиг. 10с) представлен электронный блок, выполненный по евростандарту «крейта КАМАК», который содержит разъемы и электронные платы для сопряжения ИВЛ с персональной ЭВМ (на фото не показана). Евростандартная система КАМАК представляет собой универсальный набор блоков и плат, позволяющих производить сопряжение широкого класса устройств с выходными аналоговыми сигналами с наиболее распространенными вычислительными комплексами в стандартах IBM и ДЕС. На электронных платах навесным монтажом с использование больших интегральных схем и операционных усилителей изготовлены: блок фотоприемников, демодулятор со схемой синхронного детектирования, блоки аналого-цифровых преобразователей (АЦП) и цифро-аналоговых преобразователей (ЦАП). Система нагружения для создания статических деформаций стального листа показана на фото фиг. 10d).
Для контроля кривизны, например, поверхности крыла самолета длиной от 4 м до 10 м, которое практически не имеет кручения вдоль своей продольной оси (см. фиг. 13), информационно-измерительный оптоволоконный кабель 18 закрепляют на верхней поверхности консоли крыла 8 от борта самолета до конца крыла вдоль оси его максимальной изгибной жесткости 17 таким образом, чтобы плоскость, проходящая через оси трех взаимодействующих оптоволокон 4 и 5 каждой триады кабеля была перпендикулярна поверхности консоли крыла 8, а число триад оптоволокон, расположенных в информационно-измерительном оптоволоконном кабеле параллельно друг другу и реализующих измерения интегральных кривизн участков образующей поверхности по первым трем функциям Уолша-Адамара, было также не менее трех. Эти результаты получены расчетным путем и подтверждены экспериментальными исследованиями на основе принятых исходных технических данных, помещенных в разделе обоснования представленного способа контроля пологой оболочки в виде защемленной несущей поверхности.
Для осуществления контроля состояния крыла самолета в полете, вторую половину информационно-измерительного оптоволоконного кабеля 18 закрепляют на нижней поверхности консоли 8 крыла вдоль оси 17 его максимальной изгибной жесткости от конца консоли 8 до борта самолета, при этом в конце крыла в разрез между верхней и нижней частями указанного кабеля в опорно-информационых каналах 4 всех триад устанавливают линию задержки 45, за счет которой вводят временную задержку оптических сигналов в кабеле 18. Такой подход позволяет разместить всю электронную аппаратуру создания и обработки оптических сигналов информационно-измерительного оптоволоконного кабеля 18 на борту самолета.
Для контроля кривизны поверхности, например, крыла самолета длиной от 10 м до 50 м, имеющего существенное кручение вдоль своей продольной оси (фиг. 18), информационно-измерительный оптоволоконный кабель 18, состоящий из трех последовательно соединенных частей длиной L1, L2 и L1, закрепляют на верхней поверхности консоли крыла: первую часть L1 - от борта самолета до конца консоли крыла вдоль оси его первого лонжерона, вторую часть кабеля L2 - вдоль кромки торца крыла от первого до второго или третьего лонжерона, а третью часть кабеля L1 - вдоль оси второго или третьего лонжерона от торцевой кромки крыла до борта самолета, причем в каждом месте поворота кабеля на 90 градусов в разрез кабеля в стеловолокно 4 опорно-информационых каналов всех триад вводят временную задержку (линия 45) оптических сигналов, а число триад оптоволокон, расположенных параллельно друг другу в кабеле 18, реализующих измерения интегральных кривизн частей образующих поверхности крыла на соответствующих отрезках этих частей кабеля 18 по первым шести функциям Уолша-Адамара, устанавливают также не менее шести.
Получение распределения кручения вокруг продольной оси крыла самолета осуществляют по измеренным распределениям кривизны не менее двух образующих поверхности крыла. Обоснование этого положения помещено в разделе описания осуществления предложенного способа контроля после завершения разъяснения процедуры получения распределения кривизны одной образующей поверхности консоли крыла Для контроля усталостной прочности крыла фиксируют количество циклических изменений распределений кривизны и кручения его поверхности во времени. Полученные данные хранят в буферной памяти для последующего сравнения с предельно-установленными значениями циклических нагрузок.
Для контроля состояния крыла и определения мест возникновения скрытых дефектов фиксируют изменения распределений изгибной и крутильной жесткостей крыла при одинаковых нагрузках в процессе эксплуатации самолета (рулежка, взлет, крейсерский режим, разворот, снижение, посадка). Наиболее актуально раннее предупреждение разрушения силовых элементов крыла. Известно, что из-за колебаний крыла, действия статических и динамических нагрузок на него, коррозии силовых элементов конструкции и другие внешних причин возникает постепенное снижение жесткости крыла самолета. Неконтролируемое снижение жесткости крыла может привести к полному его разрушению. Разрушение силовой конструкции крыла воздушного судна в полете невозможно парировать усилиями экипажа и всегда заканчивается авиационным происшествием с многочисленными человеческими жертвами. В настоящее время для предупреждения разрушения конструкции планера периодически проводят профилактические осмотры. Однако дефектация крыла крайне затруднена сложностью доступа к силовым элементам. Чаще всего осмотр крыла может быть проведен только с внешней стороны обшивки. Это позволяет обнаруживать явные признаки остаточной деформации крыла и наружные трещины, но не решает задачи обнаружения скрытых разрушений. Разборка крыла для осмотра его силовых элементов требует значительных материальных затрат.
Таким образом предложенный способ контроля состояния длинномерного объекта в виде защемленной несущей поверхности, например, крыла самолета включает в себя следующие операции:
- изготовление волновода в виде информационно-измерительного оптоволоконного кабеля, содержащего определенное число оптоволоконных триад Уолша-Адамара;
- жесткое закрепление кабеля на поверхности консоли крыла от борта самолета до конца крыла вдоль оси его максимальной изгибной жесткости или лонжеронов таким образом, чтобы вся электронная аппаратура размещалась на борту самолета;
- генерировании оптических импульсов и подача их на вход оптоволокон опорно-информационные каналов каждой триады кабеля;
- измерение интегральной кривизны каждого участка образующей поверхности, определяемого номером триады Уолша-Адамара, вдоль оси кабеля;
- фотоприем, детектирование, усиление и преобразование в цифровой код разностных сигналов интегральных кривизн с выходов всех оптоволоконных триад информационно-измерительного оптоволоконного кабеля, соответствующих коэффициентам разложения распределения кривизны образующей несущей поверхности по функциям Уолша-Адамара;
- восстановление с помощью полученных коэффициентов разложения и специального алгоритма распределений кривизны одной или более образующих поверхности крыла вдоль оси кабеля;
- введение задержки времени для селективного контроля распределений кривизны более одной образующей поверхности крыла;
- получение распределения кручения вокруг продольной оси крыла самолета по измеренным распределениям кривизны не менее двух образующих поверхности крыла.
- масштабное преобразование полученных распределений кривизны образующих поверхности крыла по известным распределениям жесткостей в пространственно-временные распределения моментов, сил и напряжений, действующих вдоль оси кабеля;
- фиксация количества циклических изменений распределений кривизны и кручения поверхности крыла во времени для контроля его усталостной прочности;
- фиксация изменения распределений изгибной и крутильной жесткостей крыла при одинаковых нагрузках в процессе эксплуатации самолета для определения мест возникновения скрытых дефектов в крыле;
- сравнение полученных физико-механических характеристик текущего состояния крыла самолета с заранее заданными характеристиками и принятие решения о его состоянии.
Измерительная волноводная линия (ИВЛ), содержащая пару взаимодействующих стеловолокон или набор оптоволоконных триад, помещенных в общую светоотражающую оболочку, заполненную иммерсионной жидкостью (см. фиг. 9а, b, с, d) по сути является распределенным чувствительным элементом информационно-измерительного оптоволоконного кабеля, предназначенного для измерения интегральных кривизн участков образующих контролируемой поверхности вдоль оси кабеля.
Техническая сущность способа измерений кривизны поверхности иллюстрируется фиг. 9b), фиг. 11-13, 15 и заключается в следующем. Стекловолокно 4 опорно-информационного канала ИВЛ (см. фиг. 9b) возбуждается оптическим сигналом от импульсного когерентного лазера 21. Иммерсионная жидкость 6 и стекловолокна 4, 5 помещены в светоотражающую оболочку 7. Подбором показателя преломления иммерсионной жидкости 6 обеспечивается требуемая начальная оптическая связь в дб/м между стекловолокном 4 опорно-информационного канала и двумя стекловолокнами 5 измерительных каналов ИВЛ. За счет начальной связи часть световой энергии из стекловолокна 4 переходит в стекловолокна 5. На выходе ИВЛ, жестко закрепленной на поверхности консоли крыла 8 (в эксперименте -стальной пластины) к стекловолокнам 4 и 5 подключены фотоприемники 32-34. Если изгибы поверхности консоли 8 в вертикальной плоскости отсутствуют, то сигналы фотоприемников 32-34 с выходов стекловолокон 5 одинаковые и на выходе подключенного к ним дифференциального усилителя 38 сигнал равен нулю. Фотоприемник 32, подключенный на выход стекловолокна 4 и его усилитель 35 позволяют получить выходной уровень опорного сигнала.
При изгибах пластины 8 в ту или иную сторону связь стекловолокна 4 опорно-информационного канала с стекловолокнами 5 измерительных каналов меняется с разной по знаку зависимостью и на выходе усилителя 38 вырабатывается сигнал, пропорциональный интегралу от кривизны поверхности 8.
Поясним сказанное формальным аппаратом рассеяния волн в ИВЛ.
Матрицу передачи комплексных волн мощности двух направленно-связанных линий (см. фиг. 11) с одинаковым замедлением групповых скоростей волн, где к - волновое число, обозначим [S]:

Схематично многополюсник с матрицей [S] изображен на фиг. 11, где выделены пары клемм входов 11 и 12 и клемм выходов 13 и 14. При возбуждении пары клемм входов 11 и 12 волной с единичной амплитудой на парах клемм выходов 13 и 14 (фиг. 11) появляются сигналы:

Приращение амплитуд волн за счет изгиба поверхности с кривизной k приводит к следующему изменению распределения амплитуд по каналам
Фотоприемники на выходе многополюсника измеряют мощность в каждом канале. Эта мощность пропорциональна квадрату амплитуды напряжений и для двух каналов запишется с точностью до величины второго порядка малости в следующем виде

Сумма сигналов с фотодиодов дает суммарную мощность (P1+Р2)~1.
Разность сигналов пропорциональна разности мощностей в описывается следующим соотношением:

Из (24) следует, что для нахождения измеряемой величины кривизны необходимо в (23) подставить значение аргумента kΔSg, которое может быть определено при условии K(х)≡0. Это приводит к неудобствам и потере точности при флуктуациях мощности источника в процессе измерений, для трехканальной линии (фиг. 14а) имеем:
 ,
,
 ,
,
 ,
,
где Р1, Р2, P3 - мощности волн в каждом канале.
В этом случае аргумент kΔSg определяется из соотношения
 ,
,
или при малости g: 
По величине аргумента, известному ΔS и k определяется измеряемая величина

Обеспечение селективности измерений кривизны вдоль протяженных отрезков образующей контролируемой поверхности достигается введением задержки по времени оптического сигнала в опорно-информационном канале ИВЛ, например, с помощью оптических эшелонов Майкельсона (см. Материал из Википедии - свободной энциклопедии, https://ru.wikipedia.org/wiki/Линия_задержки). Величина задержки должна быть равна или больше длительности переднего фронта импульса модуляции ОКГ. В свою очередь, длительность Δτ этого фронта определяется из условия

где n - оптическая плотность (показатель преломления) стекловолокна; С - скорость света в вакууме.
Так, для стекловолокна с  и ΔS=0,5 м получим
и ΔS=0,5 м получим  нс.
нс.
Электрические сигналы 15, 16 (фиг. 12) соответственно после фотопреобразования оптических сигналов с выходов стекловолокон 4 и 5 опорно-информационного и измерительного каналов ИВЛ имеют при этом ступенчатую периодическую структуру.
Таким образом совместная обработка этих сигналов по специальному алгоритму, базирующемуся на основе спектрального анализа и теории рассеяния цепей СВЧ, позволяет осуществить контроль распределения кривизны образующей несущей поверхности, например, крыла самолета, представляющего характерный вид защемленной пологой оболочки.
На основе полученных распределений кривизны двух образующих поверхности консоли крыла можно, как показано ниже, получить распределение кручения по продольной оси крыла.
Исходя из известных положений дифференциальной геометрии и теоремы Менье в случае чистого изгиба кривизна Ki(ϕ) образующей линии цилиндрической длинномерной конструкции в сечении с параметром Si (S - дуговая координата осевой линии) выражается при условии d<<Ri формулой

где  кривизна образующей цилиндрической поверхности в плоскости изгиба крыла;
кривизна образующей цилиндрической поверхности в плоскости изгиба крыла;
ϕ∈[0; 2π] - текущее значение угла, отсчитываемого в плоскости поперечного сечения цилиндрической части поверхности крыла:
ϕ0 - угол в плоскости поперечного сечения между начальной образующей и образующей, лежащей в плоскости чистого изгиба поверхности крыла;
Ri - радиус кривизны образующей поверхности крыла;
d - диаметр цилиндрической части поверхности крыла.
Выражение (1) можно представить в виде

где 
Из (28) следует, что

Таким образом, для определения Kni через K1 и K2 достаточно произвести измерения кривизны образующих в плоскости поперечного сечения цилиндрической поверхности крыла при двух значениях угла ϕ, например, при ϕ=0 и  .
.
При известных  и K2=Ki(0°) на основании формул (28), (29), (30) легко определить ϕ0 и Ki(ϕ).
и K2=Ki(0°) на основании формул (28), (29), (30) легко определить ϕ0 и Ki(ϕ).
При одновременном наличии изгиба и кручения поверхности крыла будет иметь место выражение для кривизны образующей при угле ϕ

Это обусловлено тем, что при чистом кручении кривизна для всех образующих будет постоянной, т.е. не зависит от ϕ, а при отсутствии кручения определяться формулой (28).
Отсюда при условии  определяется угол ϕ0, характеризующий сечение, на котором вклад в кручение образующей обуславливается только кручением поверхности цилиндра вокруг оси.
определяется угол ϕ0, характеризующий сечение, на котором вклад в кручение образующей обуславливается только кручением поверхности цилиндра вокруг оси.
Это приводит к соотношению  , которое верно при
, которое верно при  и
и  , где
, где

Отсюда  , а кручение осевой линии определяется в соответствии с известной формулой дифференциальной геометрии
, а кручение осевой линии определяется в соответствии с известной формулой дифференциальной геометрии

Таким образом в представленном выше материале показаны и обоснованы физические принципы, положенные в основу предложенного здесь способа контроля длинномерного объекта-пологой оболочки в виде несущей поверхности и устройства для его осуществления.
Способ контроля состояния несущей поверхности, например, крыла самолета длиной от 4 м до 10 м осуществляется при работе устройства, структурная схема которого показана на фиг. 13, следующим образом.
Устройство содержит источник модулированной волновой энергии 20, выполненный в виде импульсного когерентного лазера 21, подключенного через первый пространственный фильтр, содержащий оптический усилитель 22 и оптический разъем 23, на вход информационно-измерительного оптоволоконного кабеля 18. В свою очередь кабель 18 содержит три оптоволоконные триады, реализующие первые три функции Уолша-Адамара. Для этого в разрез оптоволокон опорно-информационных каналов кроме «нулевой» триады (фиг. 14а), в «первой» триаде на расстоянии L/2 установлен один кросс-коммутатор 19 (фиг. 14b), а во «второй» триаде на расстояниях L/4 и 3L/4 соответствено (фиг. 8) установлены два кросс-коммутатора 19, где L - длина кабеля 18.
Сам информационно-измерительный оптоволоконный кабель 18, поперечное сечение которого показано на фиг. 9с), жестко закреплен на поверхности 8 консоли крыла вдоль оси 17 его максимальной изгибной жесткости.
Выход информационно-измерительного оптоволоконного кабеля 18, в данном случае - выходы всех трех оптоволоконных триад кабеля 18, также через оптический разъем 24 и второй пространственный фильтр, реализованный в виде блока фотоприемников 25, подключены к входу демодулятора 26, выход которого соединен с дополнительно установленными, последовательно соединенными блоком АЦП 27, вычислительным устройством 28 и видеотерминалом 29, причем второй вход вычислительного устройства 28 соединен с выходом дополнительно установленной буферной памяти 30, а второй выход вычислительного устройства 28 через блок ЦАП 31 подключен к второму входу демодулятора 26.
Устройство, представленное на фиг. 13, имеет следующие конструктивно-технологические особенности, позволяющие наиболее эффективно реализовать предложенный способ контроля состояния защемленной несущей поверхности в виде крыла самолета и достигнуть поставленной цели предложенного технического решения.
Первый оптический разъем 23 содержит разветвитель оптических сигналов, соединяющий выход оптического усилителя 22 со всеми входами опорно-информационных каналов информационно-измерительного оптоволоконного кабеля 18;
Для снижения затухания оптических сигналов в информационно-измерительном оптоволоконном кабеле 18 используют многомодовые кварцевые стекловолокна с диапазоном пропускаемых длин волн (850-1550) нм. Это вызвано тем, что оптический сигнал затухает во всех стекловолокнах, со скоростью, зависящей от длины волны передатчика источника света. Существует три длины волны, на которых затухание оптического сигнала обычно минимально, - 850, 1310 и 1550 нм. Они известны как окна прозрачности и часто используются не практике. В качестве кросс-коммутатора 19 используют оптический трехканальный микроразъем (см., например, Наний О.Е. Основы технологии спектрального мультиплексирования каналов передачи (WDM). LIGHTWAVE russian edition No2 2004, http://www.lightwave-russia.com).
Оптическая линии задержки выполнена в виде набора плоскопараллельных пластин из кварцевого стекла, например, по принципу эшелонов Майкельсона (см. там же).
В качестве иммерсионной жидкости 6 (фиг. 9 с) используют (см. https://ru.wikipedia.org/wiki/Иммерсия_(микроскопия)), например, водный раствор глицерина с добавлением спирта или различные высококипящие и низкозамерзающие природные и синтетические масла, а также кремнийорганические жидкости.
Для предотвращения разрывов информационно-измерительного оптоволоконного кабеля 18 (фиг. 9с) при температурных изменениях размеров поверхности контролируемого крыла самолета в конструкцию указанного кабеля 18 между светоотражающими оболочками оптоволоконных триад и последней защитной оболочкой 10 вводят твердый диэлектрик 9, например, полиэтилен, армированный кевларовыми нитями или стеклонитями, а также боковыми стержнями, например, из стеклопластика. Полиэтилен обладает отличными физическими параметрами (высокая прочность, хорошая износостойкость, неподверженность ультрафиолетовому излучению, окислению и другим химическим воздействиям), и хорошими диэлектрическими свойствами. Полиэтилен имеет неплохую сопротивляемость проникновению влаги, низким и высоким температурам, а также обладает способностью не изменять свои физические свойства под воздействием перепадов температуры окружающей среды. Армирование кевларовыми нитями или стеклонитями позволяет достигнуть величины допустимого растяжения в 1000-2000 Н.
Для защиты от ударов и снижения сил раздавливающего воздействия, а также повышения точности закрепления на контролируемой поверхности консоли 8 крыла за счет правильной ориентации информационно-измерительного оптоволоконного кабеля 18 в пространстве его изготавливают с прямоугольным профилем поперечного сечения последней защитной оболочки 10.
Для защиты информационно-измерительного оптоволоконного кабеля 18 от резких изменений температуры окружающей среды, последнюю защитную оболочку 10 указанного кабеля с прямоугольным профилем поперечного сечения изготавливают из термостойкого, безгалогенного компаунда.
Информационно-измерительный оптоволоконный кабель 18 жестко закрепляют на поверхности консоли 8 крыла, например, с помощью с помощью клея холодного отвердевания Х60 или циакрина ЭО, которые хорошо себя зарекомендовали при наклеивании широко применяемых в авиации тензодатчиков. Клей Х60 применим при изменении окружающей температуры от -200°С до +80°С, а циакрин ЭО имеет рабочий диапазон температур -80°С +80°С (см. http://cestus.net/attaches/12/X60).
В состав демодулятора 26 (фиг. 13) с пространственным разделением каналов, в соответствии с количеством оптоволоконных триад, используемых функций Уолша-Адамара, включено такое же количество (три) независимых однотипных схем синхронного детектирования оптических сигналов с выхода блока 25 фотоприемников 32-34 (фиг. 15), в каждую из которых входят три операционных усилителя 35-37, первый из которых 35 подключен к выходу фотоприемника 32 опорно-информационного канала, а второй 36 и третий 37 усилители к выходам фотоприемников 33 и 34 измерительных каналов. Выходы всех трех усилителей 35-37 являются входами четвертого операционного усилителя 38, выполняющего функции усилителя разностного сигнала, выход 41 которого является выходом схемы синхронного детектирования и одновременно входами пятого 39 и шестого 40 операционных усилителей, выходы которых в свою очередь соответственно подключены к вторым входам второго 36 и третьего 37 усилителей для изменения их коэффициентов усиления по сигналу с входа 42 балансировки каждой схемы синхронного детектирования, подключенного ко вторым входам пятого 39 и шестого 40 усилителей. Вход 42 балансировки соединен с выходом блока ЦАП 31 (фиг. 13).
Оптический усилитель 22 в источнике модулированной волновой энергии 20 выполнен полупроводниковым или оптоволоконным, например, на основе легированных эрбием или иттербием оптических волокон.
Блок фотоприемников 25 выполнен на основе p-i-n или лавинных фотодиодов с трансимпедансными усилителями.
Буферная память 30 выполнена в виде оптического накопителя, изготовленного по технологии «Blu-ray». Объемы хранимой в таких серийно выпускаемых накопителях информации могут достигать 66 Гигабайт.
Кросс-коммутаторы 19, импульсный когерентный лазер 21, оптический усилитель 22, оптические разъемы 23 и 24, блок фотоприемников 25, блок АЦП 27, вычислительное устройство 28, видеотерминал 29, буферная память 30, блок ЦАП 31, входящие в состав устройства на фиг. 13, являются стандартными электронными изделиями.
Устройство на фиг. 13 работает следующим образом.
Импульсный когерентный лазер 21 (фиг. 13) вырабатывает оптические импульсы, возбуждающие через усилитель 22 и оптический разъем 23 в виде разветвителя, пространственную систему входов трех стекловолокон опорно-измерительных каналов в трех триадах Уолша-Адамара, размещенных в информационно-измерительном оптоволоконном кабеле 18. С выходов опорных и измерительных каналов всех оптоволоконных триад, являющихся общим выходом кабеля 18, подключенного через оптический разъем 24 к блоку фотоприемников 25, поступают оптические импульсные сигналы, соответствующие распределению интегральных кривизн различных участков образующей поверхности 8 консоли крыла вдоль оси кабеля 18.
В блоке фотоприемников 25 происходит детектирование поступивших оптических сигналов, а в демодуляторе 26 усиление и предварительная аналоговая обработка электрических сигналов с выходов блока фотоприемников 25 (см. фиг. 15). Затем эти сигналы с выхода демодулятора 26 подаются в блок АЦП, а из него в виде цифровых кодов в вычислительное устройство 28. С помощью специального алгоритма и данных, поступающих из буферной памяти 30 на второй вход устройства 28, по измеренному распределению интегральных кривизн различных участков образующей поверхности 8 консоли крыла вдоль оси кабеля 18, которые однозначно соответствуют коэффициентам разложения кривизны поверхности 8 по трем первым базисным функциям Уолша-Адамара, восстанавливается само распределение кривизны образующей поверхности 8 вдоль оси кабеля 18.
Далее по известному распределению изгибной жесткости крыла в устройстве 28 производят масштабное преобразование распределения кривизны поверхности в пространственно-временные распределения моментов, сил и напряжений, действующих вдоль оси кабеля 18. Затем отображают полученные результаты на экране видеотерминала 29 и, сравнивая полученные физико-механические характеристики текущего состояния поверхности 8 с заранее заданными характеристиками из буферной памяти 30, принимают решение о состоянии крыла самолета.
Поясним работу блока фотоприемников 25 и схемы синхронного детектирования демодулятора 26, показанных отдельно на фиг. 15.
Фотоприемники 32-34 блока 25 производят квадратичное детектирование оптических сигналов, а последующие цепи-дальнейшее усиление и предварительную аналоговую обработку электрических сигналов с выходов фотоприемников 32-34.
Оптические сигналы с выходов каналов каждой оптоволоконной триады кабеля 18 поступают на фотоприемники 32-34 (фиг. 15) и усиливаются усилителями 35-37 с управляемым коэффициентом усиления. Усиленные сигналы с измерительных каналов поступают на дифференциальный усилитель 38 и с его выхода разностный сигнал поступает на выход 41 демодулятора 26 и первые входы усилителей 39 и 40 балансировки, а после прохождения блока АЦП 27, вычислительного устройства 28 и блока ЦАП 31 через вход 42 балансировки демодулятора 26 на вторые, регулируемые входы усилителей 39 и 40 балансировки.
С усилителя 35 опорного канала сигнал подается на регулировку коэффициента усиления усилителя 38 для обеспечения нормирования сигнала на его выходе. Усилители 39 и 40 (фиг. 15) предназначены для балансировки измерительных каналов. По командам с входа 42 демодулятора 26 эти усилители 39 и 40 устанавливают такие коэффициенты передачи усилителей 36 и 37, чтобы в исходном недеформированном положении поверхности 8 консоли крыла сигнал на выходе дифференциального усилителя 38 равнялся нулю. Эта операция проводится во всех трех одинаковых схемах синхронного детектирования демодулятора 26 один раз перед началом измерений кривизны поверхности 8 консоли крыла.
Далее представлено краткое описание экспериментальной установки и основные результаты исследований.
Представленная на фиг. 13 структурная схема устройства для осуществления заявленного способа реализована в виде экспериментальной установки показанной на фотографиях фиг. 10 а, b, с, d Для экспериментального образца устройства контроля геометрии защемленной стальной пластины (фиг. 10b) был выбран ранее описанный, нелинейный алгоритм по первым двум функциям Уолша-Адамара. Это предопределило конструктивную структуру измерительной волноводной линии (ИВЛ), которая состоит из двух оптоволоконных триад, образованных кварцевыми стекловолокнами.
Схема ИВЛ показана на фиг. 14 а) и b). ИВЛ содержит две группы волокон, образующих функциональные волноводные структуры измерений (оптоволоконные триады) разложения кривизны по «нулевой» и «первой» базисным функциям Уолша-Адамара. Каждая группа содержит опорно-информационный канал - центральное стекловолокно 4 и измерительные каналы - верхнее и нижнее стекловолокна 5 (фиг. 14а). Вторая триада со стекловолокнами 5 измерительных каналов (фиг. 14b)с вставленным по середине кросс-коммутатором 19 «первой» базисной функции Уолша-Адамара необходима для селекции знака измеряемой интегральной кривизны вследствии квадратичного детектирования оптических сигналов на выходе ИВЛ.
Такая конструкция ИВЛ изготовлена на основе промышленного стекловолокна диаметром 400 μk. Подготовленные к совместной укладке стекловолокна размещаются в специальные оправки с иммерсионной жидкостью 6 - водным раствором глицерина. Последняя необходима для обеспечения требуемого значения начальной оптической связи стекловолокон. В дальнейшем связь между стекловолокнами регулируется за счет подбора расстояния между ними и оптической плотности внешнего иммерсионного слоя. Затем структура из стекловолокон покрыта жидким акрилат-полимером и организована его полимеризация при температуре 500°С за время около 30 с и ИВЛ с помощью эпоксидной смолы закреплена по середине стального листа (фиг. 10 а и b).
Получены следующие результаты экспериментальных исследований.
На экспериментальной установке проведены измерения с помощью ИВЛ кривизны несущей поверхности в виде защемленной прямоугольной стальной пластины, нагружаемой статической сосредоточенной нагрузкой.
На фиг. 16 показана выходная характеристика 43 блока обработки сигналов (демодулятора 26) с блока фотоприемников 25, представляющая зависимость напряжения на выходе блока в зависимости от кривизны ИВЛ и соответственно стальной пластины.
Профили 44 поперечных сечений стальной пластины при различных величинах статических нагрузок (от 0 до 300 Н), показаны на фиг. 17.
Аналогичным образом устройство, показанное на фиг. 13, может использоваться для контроля кривизны несущей поверхности 8, например, крыла самолета длиной от 10 м до 50 м, имеющего существенное кручение вдоль своей продольной оси, и два лонжерона 46 и 47.
В этом случае, как показано на фиг. 18, информационно-измерительный оптоволоконный кабель 18, состоящий из трех последовательно соединенных частей длиной L1, L2 и L1, закрепляют на верхней поверхности консоли крыла 8 следующим образом. Первую часть кабеля 18 длиной L1 - от борта самолета до конца консоли 8 крыла вдоль оси его первого лонжерона 46. Вторую часть кабеля 18 длиной L2 - вдоль кромки торца крыла от конца первого лонжерона 46 до конца второго лонжерона 47. Третью часть кабеля 18 длиной Li закрепляют вдоль оси второго лонжерона 47 от торцевой кромки крыла до борта самолета. Причем в каждом месте поворота кабеля 18 на 90 градусов в разрез кабеля в стеловолокно 4 опорно-информационых каналов всех триад вводят временную задержку (линия задержки 45) оптических сигналов, а число триад оптоволокон, расположенных параллельно друг другу в кабеле 18, реализующих измерения интегральной кривизны поверхности крыла на соответствующих отрезках этих частей кабеля 18 по первым шести функциям Уолша-Адамара, устанавливают также шесть, что показано на фиг. 9d.
При этом в «нулевой» оптоволоконной триаде Уолша-Адамара нет кросс-коммутатора 19. В «первой» триаде на расстоянии L1/2 в разрез стекловолокон измерительных каналов установлен один кросс-коммутатор 19. Во «второй» триаде на расстояниях L1/4 и 3L1/4 соответствено (см. поз. 3 фиг. 8) установлены два кросс-коммутатора 19. В «третьей» триаде на расстояниях L1/4, L1/2 и 3L1/4 установлены три кросс-коммутатора 19. В «четвертой» триаде на расстояниях L1/8, 3L1/8, 5L1/8 и 7L1/8 установлены четыре кросс-коммутатора 19. В «пятой» триаде на расстояниях L1/8, 3L1/8, L1/2, 5L1/8 и 7L1/8 установлены пять кросс-коммутаторов 19. Поэтому на фиг. 18 показано расстояние между коммутаторами 19 l=L1/8, что по сути является линейной разрешающей способностью предложенного способа контроля по длине поверхности консоли 8 крыла с двумя лонжеронами 46 и 47 изображенного на фиг. 18.
В данном случае L2 - длина отрезка кабеля 18, равная расстоянию между окончаними лонжеронов 46 и 47 в конце крыла. На этом отрезке кабеля 18 можно установить в «первой» триаде на расстоянии L2/2 один кросс-коммутатор 19 (на фиг. 18 не показан).
Соответственно с использование в кабеле 18 шести оптоволоконных триад в блоке 25 устанавливают 18 фотоприемников (6 групп по 3 фотоприемника), а в демодуляторе 26 шесть одинаковых схем синхронного детектирования.
Работа устройства на фиг. 13 при подключении с помощью оптических разъемов 23 и 24 информационно-измерительного оптоволоконного кабеля 18, показанного на фиг. 18, будет отличаться реализацией в вычислительном устройстве 28 дополнительного алгоритма расчета по двум распределениям кривизн двух образующих поверхности крыла распределения кручения вдоль оси крыла с помощью формул (28-33). По известному распределению крутильной жесткости вдоль оси крыла, хранимому в буферной памяти 30, определяют распределения соответственно момента кручения, перерезывающей силы и напряжений вдоль этой же оси. Как и при изгибе полученные физико-механические характеристики кручения с помощью вычислительного устройства 28 отображают на экране видеотерминала 29, а затем сравнивают с заранее заданными характеристиками, хранящимися в буферной памяти 30 и принимают решение о состоянии крыла самолета.
На основании проведенных теоретических и экспериментальных исследований можно сделать следующие наиболее важные выводы.
В результате проведенного обоснования показана универсальность волноводного способа контроля по отношении к возможности измерения широкого класса физико-механических параметров, наиболее важным среди которые является кривизна образующей поверхности пологой оболочки в виде несущей поверхности, например крыла самолета.
Подтверждена реализуемость заявленного волноводного способа контроля состояния длинномерного объекта и возможность осуществления в виде конкретного устройства
Представленные здесь алгоритмы восстановления поверхности по измеренным распределениям кривизны ее образующих позволяют оптимально по двум целевым функциям с предельно возможной по используемой аппаратуре точностью восстановить профиль и концевую координату несущей поверхности. Показаны пути дальнейшего повышения точности, разрешающей способности и селективности контроля по предложенному способу за счет увеличения числа оптоволоконных триад Уолша-Адамара, устанавливаемых в информационно-измерительном оптоволоконном кабеле.
Таким образом применение предложенной группы технических решений, связанных единым замыслом, позволяет повысить точность и селективность контроля длинномерного объекта-пологой оболочки в виде несущей поверхности за счет создания и обоснованного выбора количества оптоволоконных триад функций Уолша-Адамара, правильного размещения кабеля на контролируемой поверхности и выборе места и необходимого количества контролируемых распределений кривизн образующих поверхности, например, крыла самолета, а также реализации предложенных алгоритмов восстановления этих кривизн по данным измерений интегральных кривизн поверхности на заданых отрезках ее образующих.
Изобретение может использоваться практически во всех научно-технических областях и сферах промышленного производства, где необходимо осуществлять контроль состояния длинномерных объектов в виде пологой оболочки, наиболее используемым представителем которой является защемленная или опертая несущая поверхность. Наиболее целесообразным является применение предлагаемого изобретения в:
- самолетостроении и судостроении, например, судов с подводными крыльями;
- промышленном строительстве крыш и козырьков зданий, а также мачтовых и купольных сооружений;
- нефтяной и газовой промышленности для контроля эксплуатационных скважин, напряженно-деформированного состояния и усталостной прочности водотделяющих буровых колонн, транспортных трубопроводов, противоаварийной автоматики;
- горнодобывающей промышленности для контроля состояния и геометрии горных выработок и шахт, контроля систем трубопроводного и ленточно-конвеерного транспортирования полезных ископаемых, противоаварийной автоматики;
- системах контроля состояния систем водоснабжения и канализации, транспортных туннелей, мостов, путепроводов, гидро- и пневмоконтейнерных трубопроводов, кабельных линий электроэнергии и передачи информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2698106C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661674C1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ КОНСТРУКЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2013 |
|
RU2544028C1 |
| Бортовая распределённая система контроля и диагностики утечек на основе технологий фотоники | 2018 |
|
RU2685439C1 |
| Способ контроля состояния длинномерного объекта | 1987 |
|
SU1791702A2 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1988 |
|
SU1793213A2 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ, КОТОРЫЙ ИСПОЛЬЗУЕТ ОПТОВОЛОКОННЫЙ ЭЛЕМЕНТ В КАЧЕСТВЕ ДАТЧИКА | 2010 |
|
RU2547143C2 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ВЕРТИКАЛЬНОГО ТЕМПЕРАТУРНОГО РАЗРЕЗА В ВОДНОЙ СРЕДЕ | 2023 |
|
RU2822208C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ГАЗООБРАЗНЫХ ВЕЩЕСТВ | 2014 |
|
RU2598694C2 |
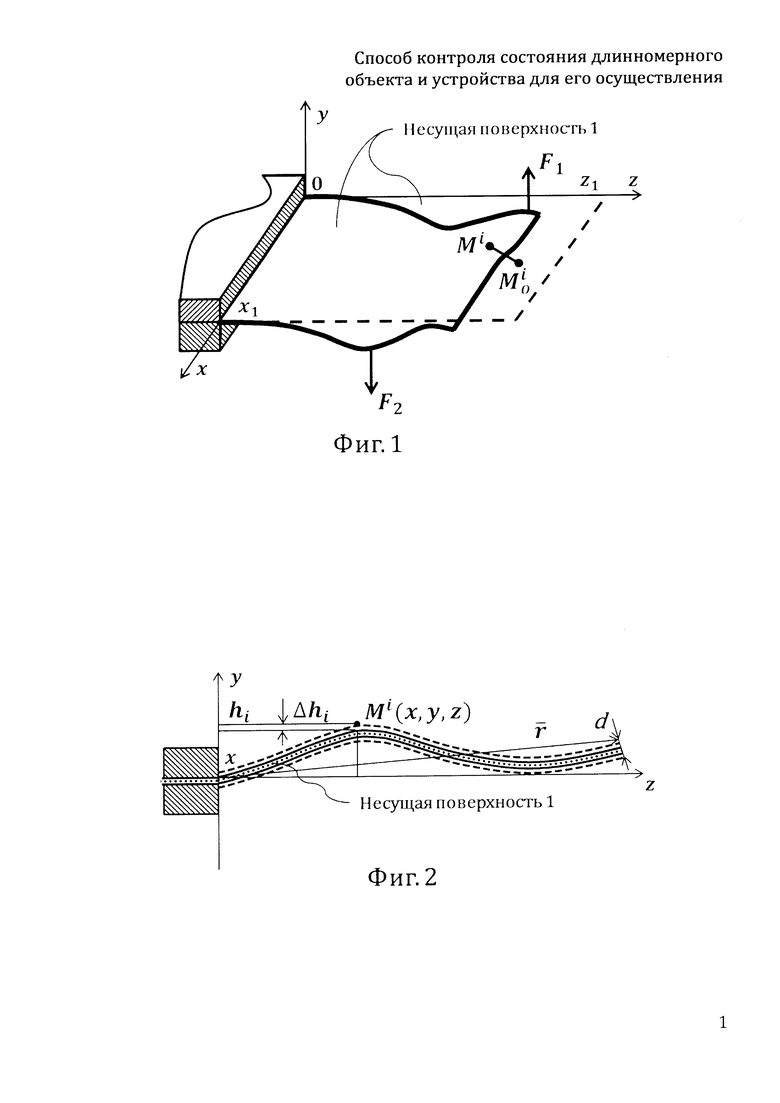
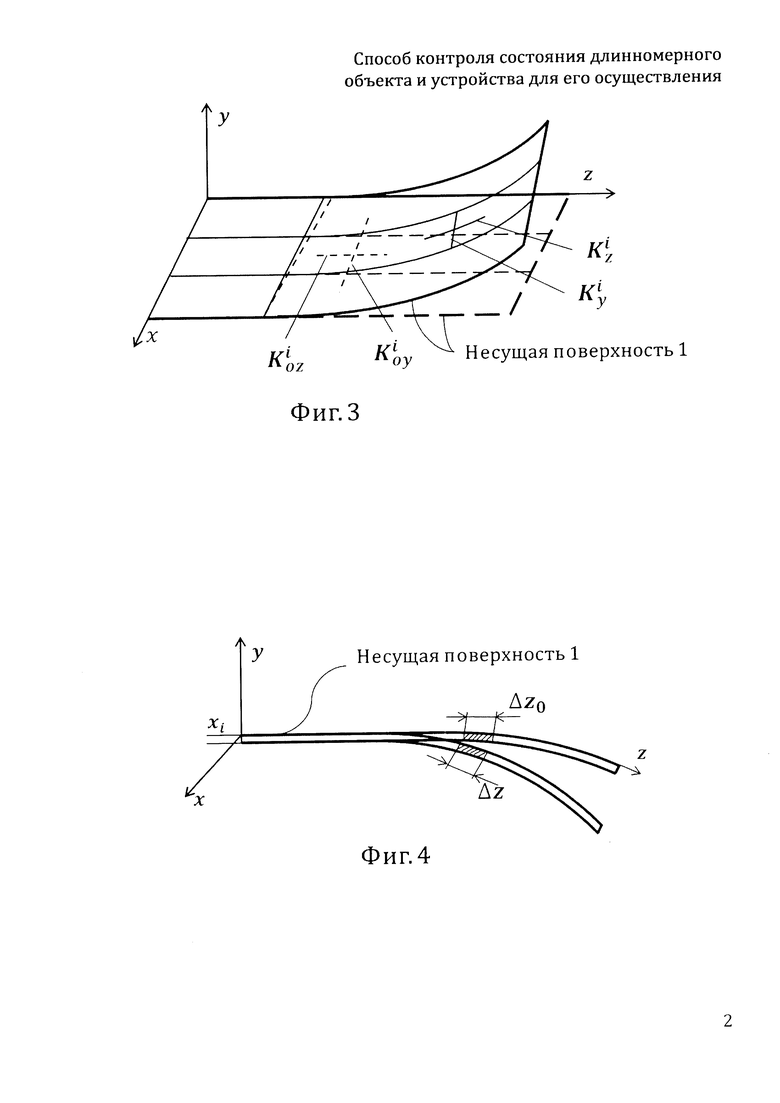
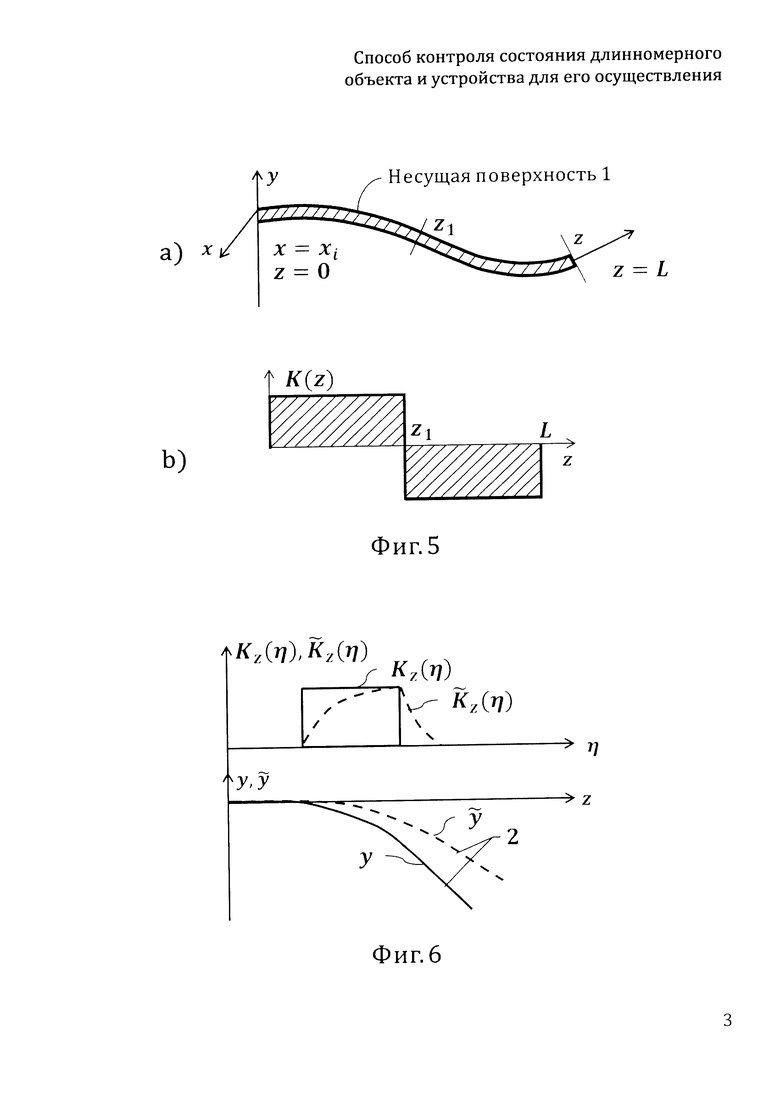
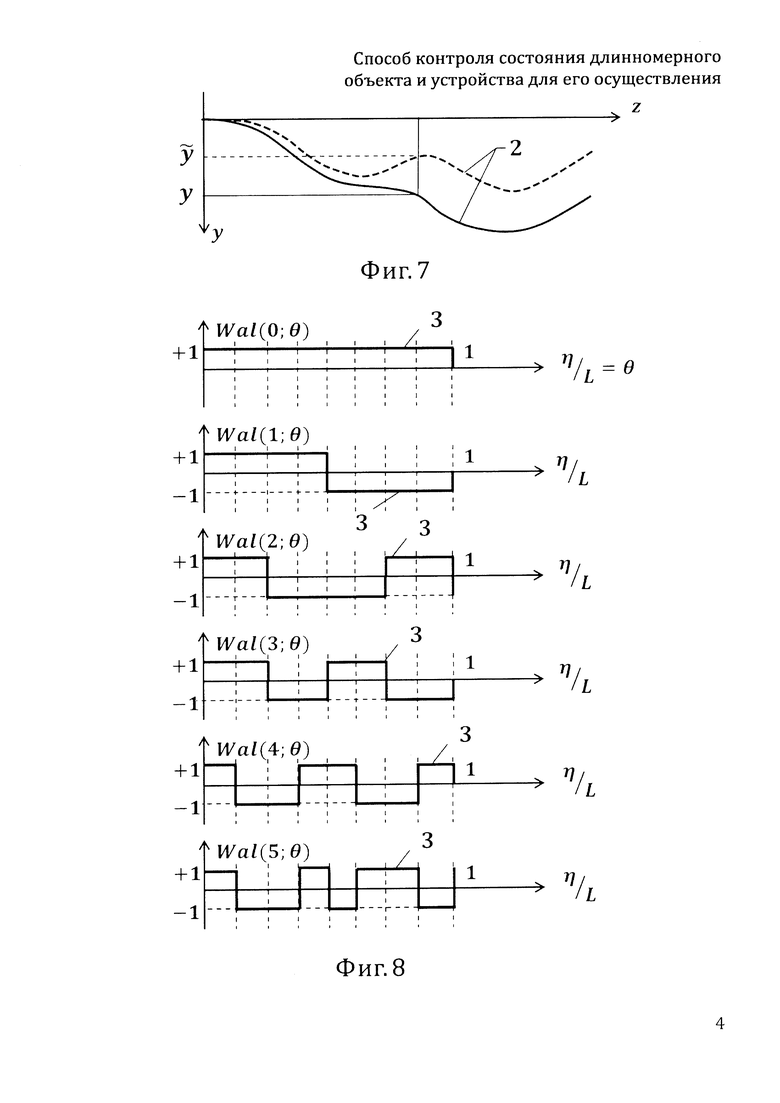
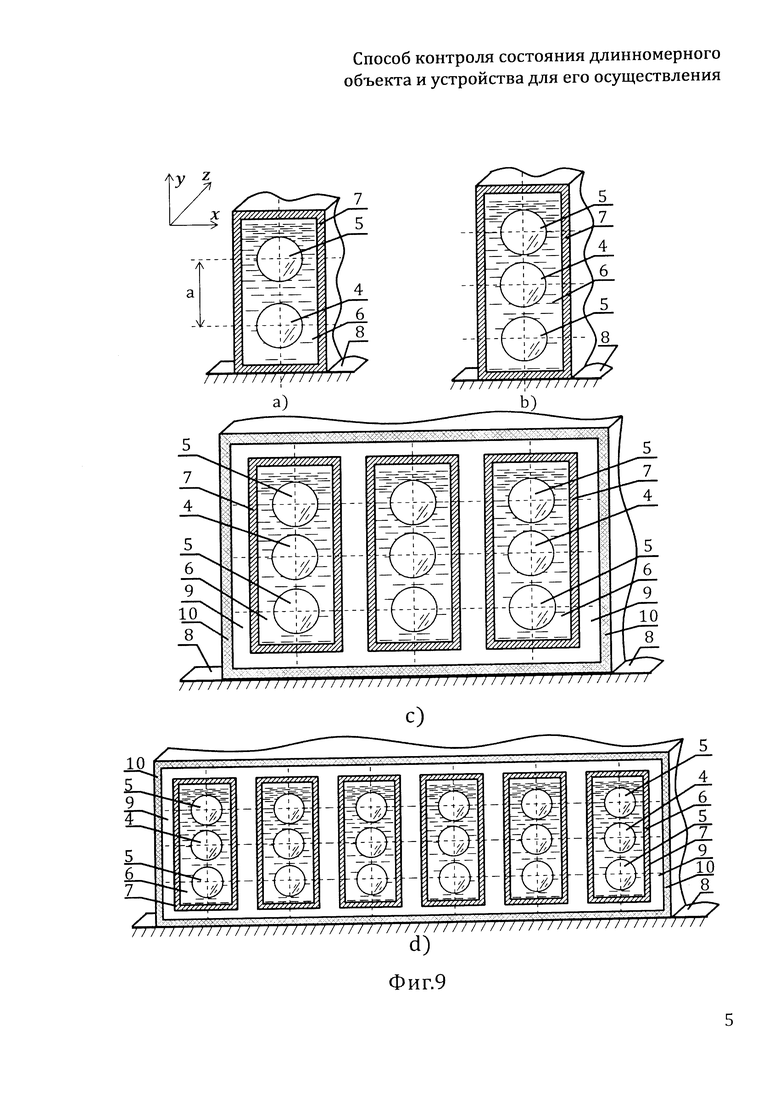
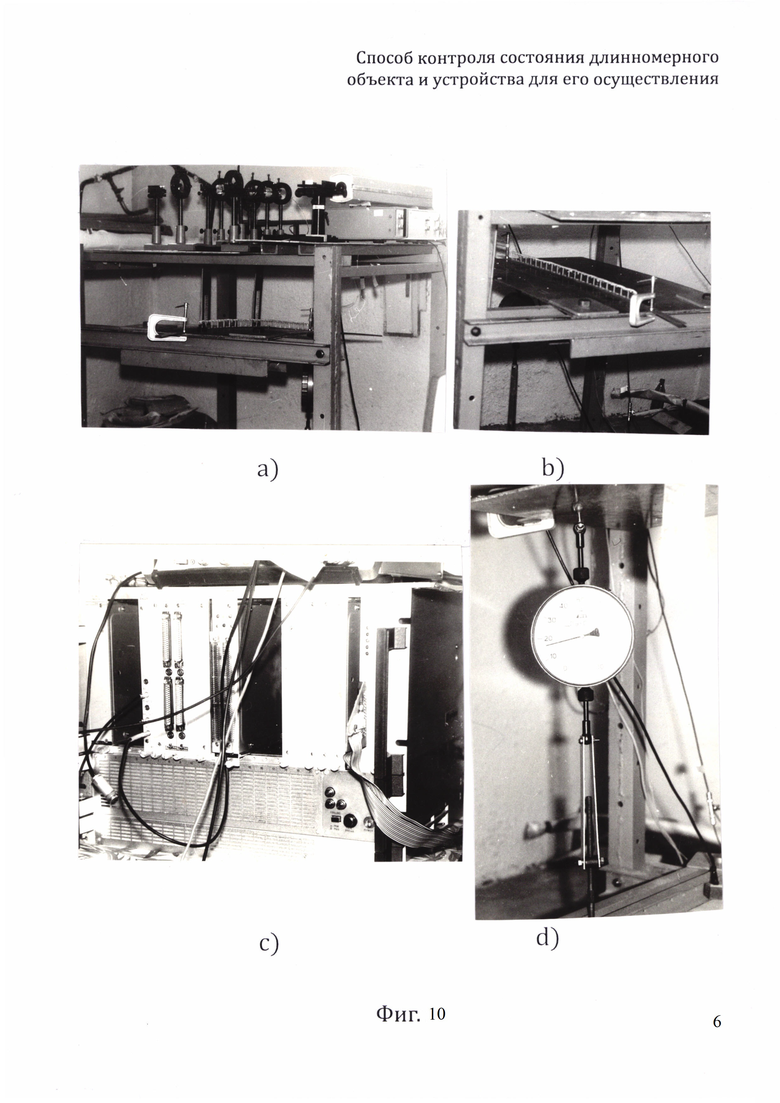
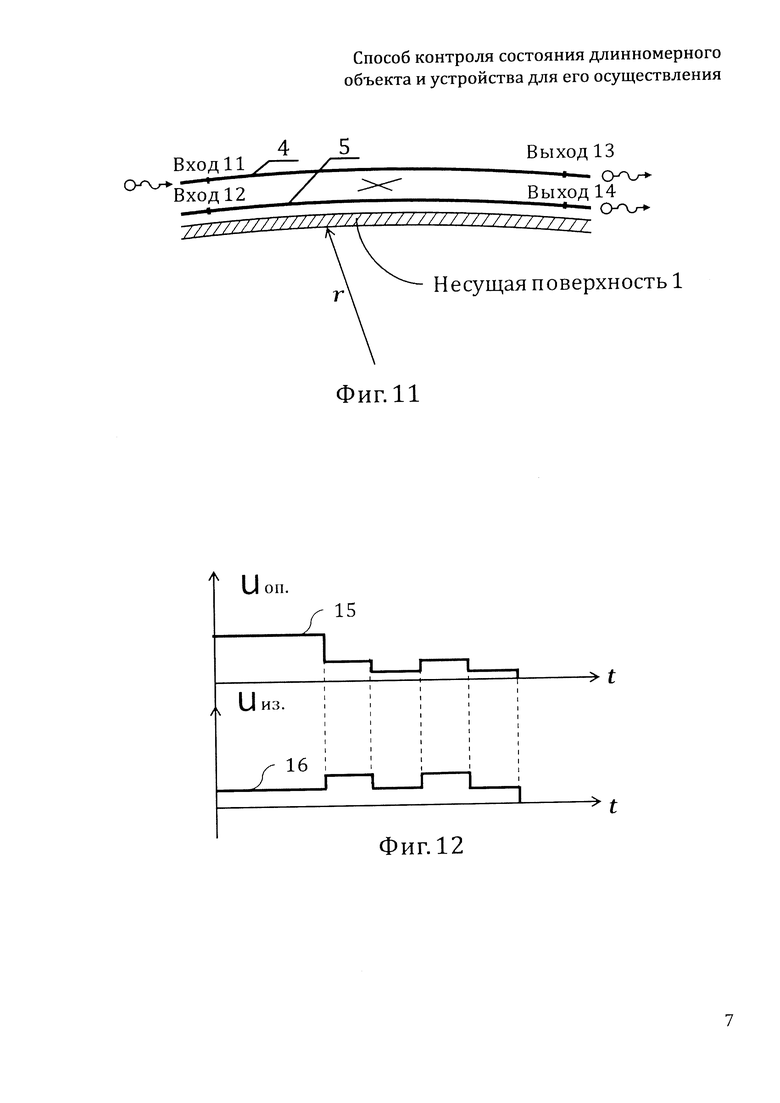
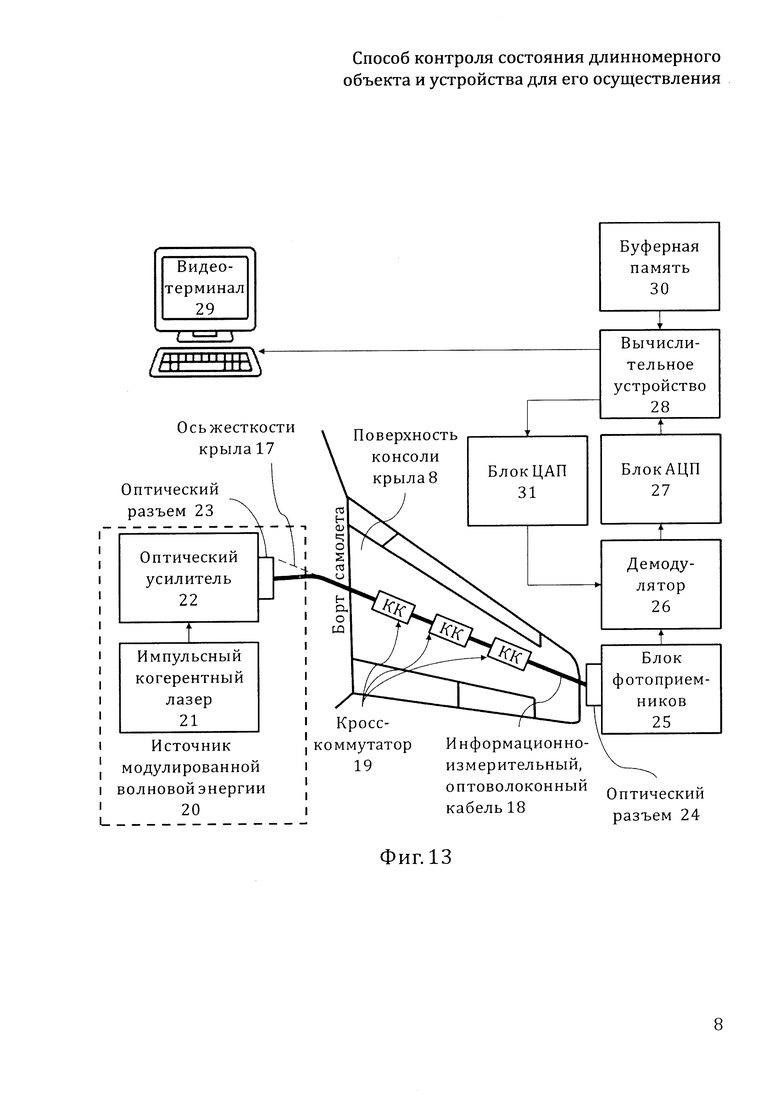
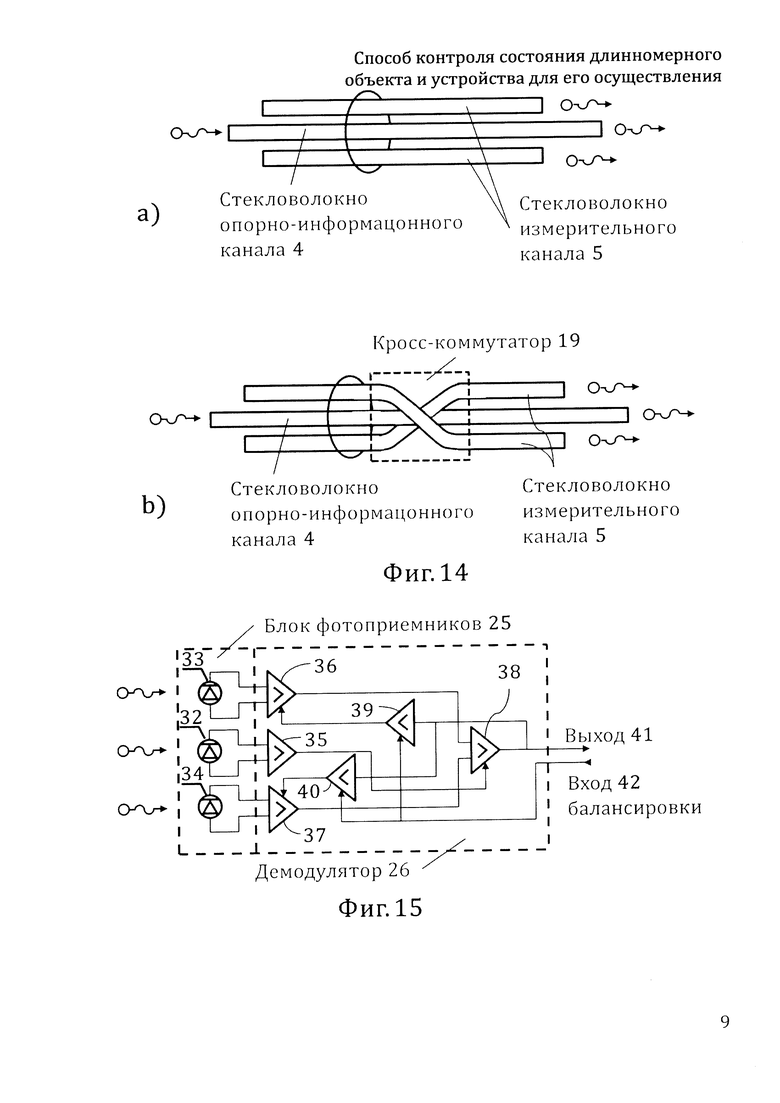
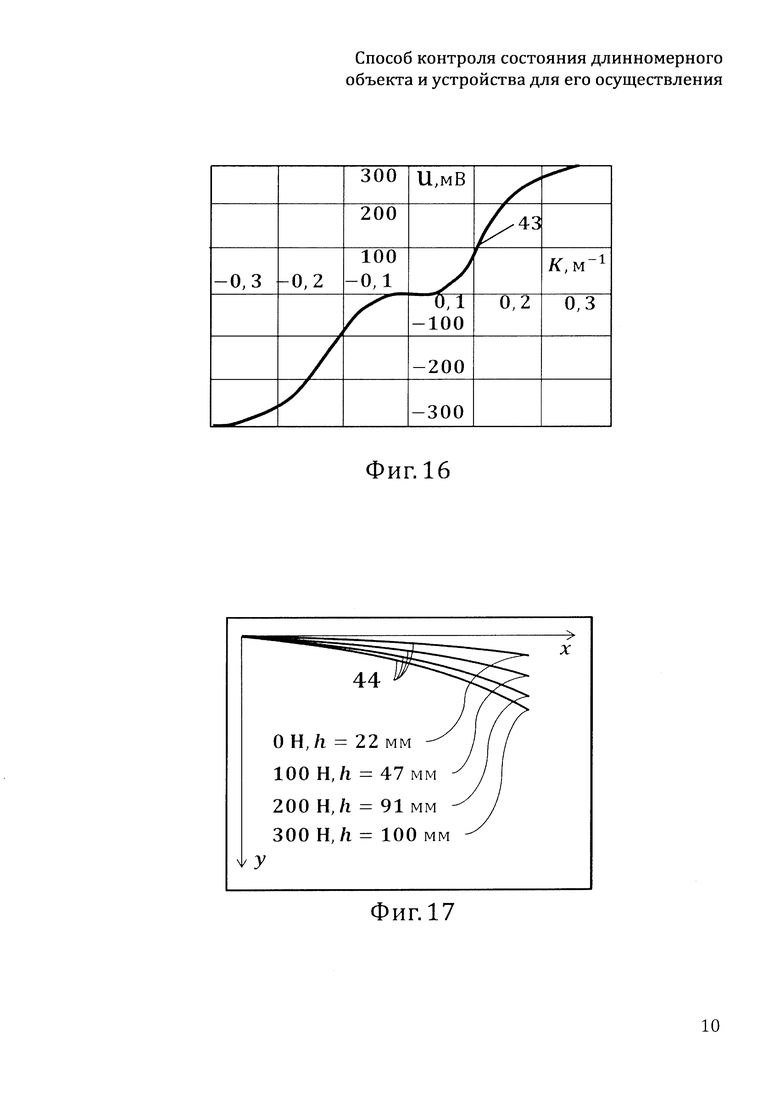

Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля параметров длинномерных объектов. В способе контроля состояния длинномерного объекта и устройстве для его реализации, посредством информационно-измерительного оптоволоконного кабеля, имеющего в зависимости от характеристик контролируемого объекта заданное количество оптоволоконных триад, реализующих последовательный набор базисных функций Уолша-Адамара, измеряют распределение интегральной кривизны на участках образующей несущей поверхности, на основании которого с помощью специального алгоритма восстанавливают само распределение кривизны образующей этой поверхности вдоль оси кабеля. Каждая из триад содержит три параллельно протянутых и контактирующих между собой по общей образующей цилиндрических кварцевых стекловолокна, помещенных в общую светоотражающую оболочку, заполненную иммерсионной жидкостью. Порядковый номер функции Уолша-Адамара реализуется за счет установки в разрез стекловолокон триады оптических кросс-коммутаторов. Селективность контроля кривизны нескольких образующих поверхности обеспечивается установкой в кабеле линий задержки, выполненных по принципу эшелонов Майкельсона. Кабель закрепляют по оси жесткости на поверхности, например консоли крыла самолета. Генерируют и подают оптические импульсы на вход опорного канала каждой триады, получают оптические сигналы на выходах всех триад кабеля и осуществляют их фотопреобразование в электрические сигналы, затем синхронно детектируют, усиливают и преобразуют эти электрические сигналы в пространственно-временные распределения кривизны, кручения изгибающих и перерезывающих сил вдоль оси кабеля. Реализует способ устройство, в состав которого входит импульсный когерентный лазер, подключенный через оптический усилитель и оптический разъем на вход кабеля, а выход кабеля, также через оптический разъем и второй пространственный фильтр в виде блока фотоприемников, подключен к входу демодулятора, выход которого соединен с дополнительно установленными последовательно соединенными блоком АЦП, вычислительным устройством и видеотерминалом, причем второй вход вычислительного устройства соединен с выходом дополнительно установленной буферной памяти, а второй выход вычислительного устройства через блок ЦАП подключен к второму входу демодулятора. Технический результат – повышение точности и селективности контроля кривизны несущей поверхности. 2 н. и 21 з.п. ф-лы, 18 ил.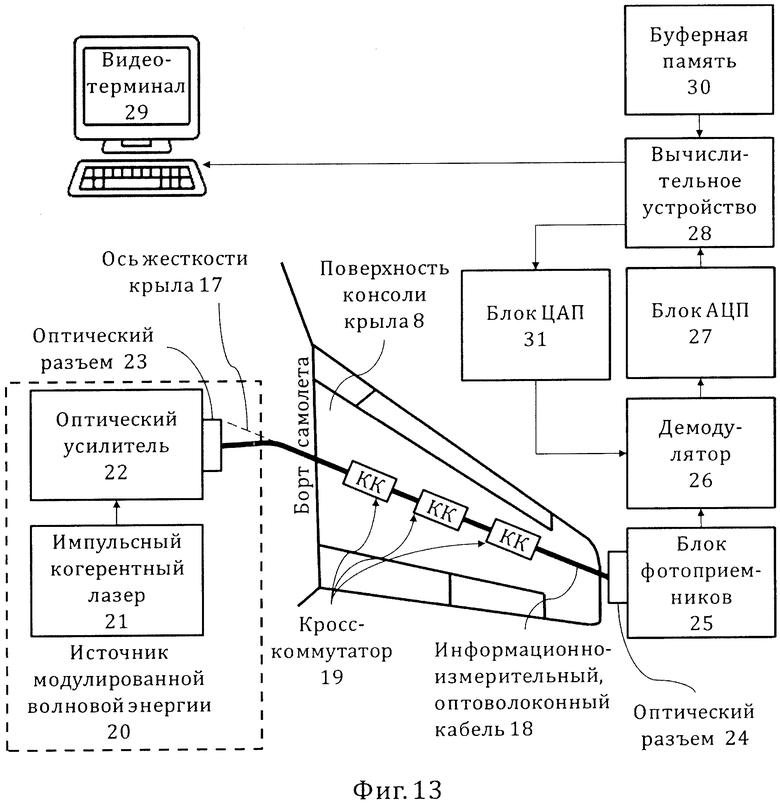
1. Способ контроля состояния длинномерного объекта, заключающийся в том, что в зоне контроля размещают протяженный канал передачи волновой энергии, измеряют параметры последней и по ним определяют физико-механические данные о состоянии объекта и их распределение в зоне контроля, для этого канал передачи волновой энергии выполняют в виде волновода, в котором установлены линии задержки одной или нескольких мод, фиксируют моды колебаний указанной энергии, формируют по крайней мере одну из них в качестве опорно-информативной, с ее учетом выделяют из указанных мод наиболее информативные по указанным физико-механическим данным и измеряют параметры каждой из них, при этом за параметры мод принимают амплитудно-фазочастотные характеристики их передачи по волноводу и реакцию этих характеристик на изменение формы, структуры объекта и окружающей температуры, при этом для контроля напряженно-деформированного состояния протяженной оболочки поверхность оболочки разбивают на произвольные элементы, площадь которых не превышает разрешающей способности метода контроля, волновод произвольным образом размещают по периметрам указанных элементов и жестко закрепляют на контролируемой оболочке, по сигналу на выходе волновода определяют распределение кривизны в плоскостях, проходящих через оси участков волновода и перпендикулярных поверхности оболочки, определяют по ним распределение главной кривизны по всем элементам оболочки, которое используют в качестве физико-механических данных о состоянии оболочки, сравнивают его в заранее заданным распределением главных кривизны и по результатам сравнения оценивают состояние протяженной оболочки,
отличающийся тем, что с целью повышения точности и селективности контроля состояния защемленной несущей поверхности,
с помощью волновода, выполненного в виде информационно-измерительного оптоволоконного кабеля, для измерения интегральной кривизны образующей поверхности в указанном кабеле по всей его длине L устанавливают по крайней мере одну оптоволоконную пару, которая содержит два параллельно протянутых полимерных или кварцевых оптоволокна цилиндрической формы, одно из указанных волокон является опорно-информационным каналом, а второе - измерительным каналом с одинаковыми показателями преломления, помещенных в общую светоотражающую оболочку, заполненную иммерсионной жидкостью, при этом сам информационно-измерительный оптоволоконный кабель жестко закрепляют на поверхности таким образом, чтобы плоскость, проходящая через продольные оси обоих оптоволокон, была перпендикулярна плоскости несущей поверхности, а для создания «нулевой» оптоволоконной триады измерительной функции Уолша-Адамара в информационно-измерительном оптоволоконного кабеле в дополнение к двум параллельно протянутым оптоволокнам помещают третье оптоволокно также цилиндрической формы и с таким же показателем преломления, которое выполняет функции второго измерительного канала, при этом все три канала, продольные оси которых параллельны между собой и оси кабеля, расположены в одной плоскости, а оптоволокно опорно-информационного канала помещено между оптоволокнами измерительных каналов, всего в кабеле создают одну (нулевую) или более одной оптоволоконные триады измерительных функций Уолша-Адамара, затем генерируют последовательность когерентных оптических импульсов длительностью Т=L/V, где V - скорость света в оптоволокне, с шириной спектра порядка 1/Т и временным интервалом T1 между импульсами, усиливают и подают указанные импульсы на вход оптоволокна опорно-информационного канала каждой оптоволоконной триады, получают оптические сигналы на выходах всех каналов указанного кабеля и осуществляют их фотопреобразование в электрические сигналы, затем синхронно детектируют, усиливают и преобразуют эти электрические сигналы в цифровую форму, далее после их обработки в вычислительном устройстве по измеренной интегральной кривизне образующей несущей поверхности и известной жесткости производят масштабное преобразование этой интегральной кривизны в пространственно-временные распределения кривизны образующей поверхности, а также моментов, сил и напряжений, действующих вдоль оси кабеля, а затем, сравнивая полученные физико-механические характеристики текущего состояния несущей поверхности с заранее заданными характеристиками, принимают решение о ее состоянии.
2. Способ по п. 1, отличающийся тем, что для создания каждой последующей, размещаемой параллельно друг другу в информационно-измерительном оптоволоконном кабеле, триады оптоволокон измерительной функции Уолша-Адамара, кроме «нулевой», в соответствии с ее номером в каждой триаде оптоволокон устанавливают на определенном расстоянии в разрез оптоволокон измерительных каналов оптические кросс-коммутаторы, с помощью которых через определяемые номером функции Уолша-Адамара отрезки вдоль оси информационно-измерительного оптоволоконного кабеля меняют местами верхнее и нижнее оптоволокна измерительных каналов.
3. Способ по любому из пп. 1, 2, отличающийся тем, что на основе обработки оптических сигналов, поступивших с выходов всех оптоволоконных триад Уолша-Адамара, установленных в информационно-измерительном оптоволоконном кабеле, преобразованных в электрические сигналы, а затем после детектирования и усиления в цифровую форму, соответствующих коэффициентам разложения распределения кривизны образующей несущей поверхности по функциям Уолша-Адамара, с помощью специального алгоритма восстанавливают само распределение кривизны образующей этой поверхности вдоль оси кабеля.
4. Способ по любому из пп. 1-3, отличающийся тем, что для контроля кривизны поверхности, например крыла самолета длиной от 4 м до 10 м, информационно-измерительный оптоволоконный кабель закрепляют на верхней поверхности консоли крыла от борта самолета до конца крыла вдоль оси его максимальной изгибной жесткости таким образом, чтобы плоскость, проходящая через оси трех взаимодействующих оптоволокон каждой триады кабеля, была перпендикулярна поверхности консоли крыла, а число триад оптоволокон, расположенных в информационно-измерительном оптоволоконном кабеле параллельно друг другу и реализующих измерения интегральной кривизны участков образующей поверхности по первым трем функциям Уолша-Адамара, устанавливают также не менее трех.
5. Способ по п. 4, отличающийся тем, что для осуществления контроля состояния крыла самолета в полете вторую половину информационно-измерительного оптоволоконного кабеля закрепляют на нижней поверхности консоли крыла вдоль оси его максимальной изгибной жесткости от конца консоли до борта самолета, при этом в конце крыла в разрез между верхней и нижней частями указанного кабеля в опорно-информационых каналах всех триад устанавливают линии задержки, за счет которых вводят временную задержку всех оптических сигналов в кабеле.
6. Способ по любому из пп. 1-3, отличающийся тем, что для контроля кривизны поверхности, например крыла самолета длиной от 10 м до 50 м, информационно-измерительный оптоволоконный кабель, состоящий из трех последовательно соединенных частей, закрепляют на верхней поверхности консоли крыла: первую часть - от борта самолета до конца консоли крыла вдоль оси его первого лонжерона, вторую часть кабеля - вдоль кромки торца крыла от первого до второго или третьего лонжерона, а третью часть кабеля - вдоль оси второго или третьего лонжерона от торцевой кромки крыла до борта самолета, причем в каждом месте поворота кабеля на 90 градусов в разрез кабеля в опорно-информационых каналах всех триад вводят временную задержку оптических сигналов, а число триад оптоволокон, расположенных параллельно друг другу в кабеле и реализующих измерения интегральной кривизны участков образующих поверхности крыла по первым шести функциям Уолша-Адамара, устанавливают также не менее шести.
7. Способ по п. 6, отличающийся тем, что получение распределения кручения вокруг продольной оси крыла самолета осуществляют по измеренным распределениям кривизны не менее двух образующих поверхности крыла.
8. Способ по любому из пп. 1-4 и 7, отличающийся тем, что для контроля усталостной прочности крыла фиксируют количество циклических изменений распределений кривизны и кручения его поверхности во времени.
9. Способ по любому из пп. 1-7, отличающийся тем, что для контроля состояния крыла и определения мест возникновения скрытых дефектов фиксируют изменения распределений изгибной и крутильной жесткостей крыла при одинаковых нагрузках в процессе эксплуатации самолета.
10. Устройство для контроля состояния длинномерного объекта, содержащее источник модулированной волновой энергии, канал передачи волновой энергии и демодулятор, оно снабжено двумя пространственными фильтрами, один из которых включен между выходом источника модулированной волновой энергии и входом канала передачи волновой энергии, а второй пространственный фильтр - между входом демодулятора и выходом канала передачи волновой энергии, который выполнен в виде многомодового протяженного волновода прямоугольного или круглого сечения или их сочетаний, а демодулятор выполнен в виде подключенных к выходам второго пространственного фильтра двух синхронных детекторов, интегратора, подключенного к выходу одного из них, и связанного с выходами интегратора, второго синхронного детектора и операционного усилителя, а также устройство снабжено гетеродинным преобразователем частот сигналов, включенным между выходами второго пространственного фильтра и входами синхронных детекторов,
отличающееся тем, что с целью повышения точности и селективности контроля состояния защемленной несущей поверхности, например крыла самолета длиной от 4 м до 10 м, источник модулированной волновой энергии выполнен в виде импульсного когерентного лазера, подключенного через первый пространственный фильтр, содержащий оптический усилитель и оптический разъем, на вход канала передачи волновой энергии, созданного в виде информационно-измерительного оптоволоконного кабеля, содержащего не менее трех триад оптоволокон, реализующих первые три функции Уолша-Адамара, каждая из триад содержит три цилиндрических кварцевых стекловолокна, два из которых являются измерительными, а одно - опорно-информационным каналом с одинаковыми показателями преломления, при этом все три стекловолокна, продольные оси которых параллельны между собой и оси кабеля, помещены в общую светоотражающую оболочку, заполненную иммерсионной жидкостью, и расположены в одной вертикальной плоскости, перпендикулярной плоскости поверхности консоли крыла, а оптоволокно опорно-информационного канала помещено между оитоволокнами измерительных каналов, в свою очередь, все три оптоволоконные триады Уолша-Адамара содержат установленные в разрез оптоволокон кабеля через расстояния, определяемые номером функции Уолша-Адамара, кросс-коммутаторы, которые вместе с оитоволокнами размещены в кабеле и отделены твердым диэлектриком с армирующими элементами от главной защитной оболочки информационно-измерительного оптоволоконного кабеля, а выход канала передачи волновой энергии, в данном случае выходы всех трех оптоволоконных триад кабеля, также через оптический разъем и второй пространственный фильтр, реализованный в виде блока фотоприемников, подключены к входу демодулятора, выход которого соединен с дополнительно установленными последовательно соединенными блоком АЦП, вычислительным устройством и видеотерминалом, причем второй вход вычислительного устройства соединен с выходом дополнительно установленной буферной памяти, а второй выход вычислительного устройства через блок ЦАП подключен к второму входу демодулятора.
11. Устройство по п. 10, отличающееся тем, что первый оптический разъем содержит разветвитель оптических сигналов, соединяющий выход оптического усилителя со всеми входами опорно-информационных каналов информационно-измерительного оптоволоконного кабеля.
12. Устройство по п. 10, отличающееся тем, что для снижения затухания оптических сигналов в информационно-измерительном оптоволоконном кабеле используют миогомодовые кварцевые стекловолокна с диапазоном пропускаемых длин волн (850-1550) нм.
13. Устройство по п. 10, отличающееся тем, что в качестве кросс-коммутатора используют оптический трехканальный микроразъем.
14. Устройство по п. 10, отличающееся тем, что оптическая линия задержки выполнена в виде набора плоскопараллельных пластин из кварцевого стекла, например, по принципу эшелонов Майкельсона.
15. Устройство по п. 10, отличающееся тем, что в качестве иммерсионной жидкости используют, например, водный раствор глицерина с добавлением спирта или различные высококипящие и низкозамерзающие природные и синтетические масла, а также кремнийорганические жидкости.
16. Устройство по любому из пп. 10-14, отличающееся тем, что для предотвращения разрывов информационно-измерительного оптоволоконного кабеля при температурных изменениях размеров поверхности контролируемого крыла самолета в конструкцию указанного кабеля между светоотражающими оболочками оптоволоконных триад и последней защитной оболочкой вводят твердый диэлектрик, например полиэтилен, армированный кевларовыми нитями или стеклонитями, а также боковыми стержнями, например, из стеклопластика.
17. Устройство по любому из пп. 10-16, отличающееся тем, что для защиты от ударов и снижения сил раздавливающего воздействия, а также повышения точности закрепления на контролируемой поверхности крыла за счет правильной ориентации информационно-измерительного оптоволоконного кабеля в пространстве его изготавливают с прямоугольным профилем поперечного сечения последней защитной оболочки.
18. Устройство по любому из пп. 10-17, отличающееся тем, что для защиты информационно-измерительного оптоволоконного кабеля от резких изменений температуры окружающей среды последнюю защитную оболочку указанного кабеля с прямоугольным профилем поперечного сечения изготавливают из термостойкого безгалогенного компаунда.
19. Устройство по любому из п. 10-18, отличающееся тем, что информационно-измерительный оптоволоконный кабель жестко закрепляют на поверхности консоли крыла, например, с помощью клея холодного отвердевания Х60 или циакрина ЭО;
20. Устройство по п. 10, отличающееся тем, что в состав демодулятора с пространственным разделением каналов, в соответствии с количеством оптоволоконных триад используемых функций Уолша-Адамара, включено такое же количество независимых однотипных схем синхронного детектирования оптических сигналов с выхода блока фотоприемников, в каждую из которых входят три операционных усилителя, первый из которых подключен к выходу фотоприемника опорно-информационного канала, а второй и третий усилители к выходам фотоприемников измерительных каналов, причем выходы всех трех усилителей являются входами четвертого операционного усилителя, выполняющего функции усилителя разностного сигнала, выход которого является выходом схемы синхронного детектирования и одновременно входами пятого и шестого операционных усилителей, выходы которых, в свою очередь, соответственно подключены к вторым входам второго и третьего усилителей для изменения их коэффициентов усиления по сигналу с входа балансировки каждой схемы синхронного детектирования, подключенного ко вторым входам пятого и шестого усилителей, в свою очередь все входы балансировки соединены с выходом блока ЦАП.
21. Устройство по п. 10, отличающееся тем, что оптический усилитель в источнике модулированной волновой энергии выполнен полупроводниковым или оптоволоконным, например, на основе легированных эрбием или иттербием оптических волокон.
22. Устройство по п. 10, в котором блок фотоприемников выполнен на основе p-i-n или лавинных фотодиодов с трансимпедансными усилителями.
23. Устройство по п. 10, в котором буферная память выполнена в виде оптического накопителя, изготовленного по технологии «Blu-ray».
| ТРУБА, СПОСОБ И УСТРОЙСТВО ДЛЯ УСОВЕРШЕНСТВОВАНИЙ ТРУБОПРОВОДОВ И Т.П. КОНСТРУКЦИЙ | 2002 |
|
RU2293249C9 |
| Устройство подвески подкапывающих лемехов и первого сепаратора к раме картофелеуборочной машины | 1961 |
|
SU140622A1 |
| Устройство для непрерывного приготовления клеевого раствора для осветления вина и т.п. жидкостей | 1938 |
|
SU65223A1 |
| WO 2017075712 A1, 11.05.2017. | |||

