Способ уменьшения заметности группы транспортных средств и устройство, реализующее этот способ (далее: «предлагаемое изобретение») относится к способам уменьшения заметности транспортных средств и к устройствам, реализующим эти способы. Предлагаемое изобретение может быть применено для создания принципиально нового типа средств уменьшения заметности транспортных средств. Предлагаемое изобретение может применяться, чтобы сделать группу транспортных средств и часть транспортных средств, входящих в состав группы транспортных средств, незаметной или менее заметной для большинства известных средств обнаружения, включая: радиолокационные средства обнаружения, акустические средства обнаружения, тепловизионные средства обнаружения, оптические средства обнаружения, а также некоторые другие типы средств обнаружения.
Ближайшим аналогом предлагаемого изобретения является способ уменьшения радиолокационной заметности, реализованный в автопилоте крылатой ракеты Tomahawk (Томагавк) (https://ru.wikipedia.org/wiki/Томагавк_(ракета)), и сам автопилот этой ракеты. Отличительной особенностью этого автопилота и реализованного в нем способа является то, что автопилот, применяя реализованный в автопилоте способ, обеспечивает возможность полета на минимальной высоте с огибанием препятствий. При полете на минимальной высоте эта крылатая ракета находится вне зоны видимости многих современных РЛС наземного базирования вплоть до достижения этих РЛС, что позволяет эффективно применять эту ракету против многих современных наземных средств ПВО и ПРО, а также против многих других наземных целей. Главным недостатком этого аналога является неэффективность против некоторых типов РЛС, включая РЛС воздушного базирования и загоризонтные РЛС. Кроме того, этот аналог эффективен только при полете на малой высоте, а полет на малой высоте по различным причинам (например, погодным) зачастую бывает неприемлем. Кроме того, данный аналог по настоящему эффективен только при полете над поверхностью с ярко выраженными неровностями (например, над холмистой местностью), так как это позволяет летательному аппарату скрываться за неровностями, а такая местность, как известно, есть далеко не везде.
Предлагаемое изобретение не имеет недостатков вышеупомянутого аналога и способно обеспечивать уменьшение заметности группы транспортных средств и части транспортных средств, входящих в состав группы транспортных средств, в различных ситуациях, включая те ситуации, в которых вышеупомянутый аналог неэффективен.
Способ уменьшения заметности группы транспортных средств включает получение необходимых данных об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а также осуществляемое вычислительным устройством или с применением вычислительного устройства определение такого варианта расположения двух или более транспортных средств относительно друг друга и/или относительно вышеупомянутых средств обнаружения и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения; при этом в случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения осуществляют действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым вычислительным устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств и/или создание и вывод соответствующих рекомендаций и/или другие действия; при этом вышеупомянутое определение осуществляют с применением вышеупомянутых данных о средствах обнаружения; при этом вышеупомянутые данные о средствах обнаружения содержат данные о движении вышеупомянутых средств обнаружения и/или об их типе и/или о наблюдаемой ими части пространства и/или о направлении распространения их излучения и/или об их параметрах работы и/или об их расположении относительно вышеупомянутых транспортных средств и/или относительно чего-то другого и/или другие данные; при этом в качестве вышеупомянутого вычислительного устройства применяют ЭВМ или вычислительное устройство, являющееся частью автопилота, или другое вычислительное устройство.
Способ уменьшения заметности группы транспортных средств может быть реализован во множестве вариантов. Первый, базовый вариант этого способа описан выше, в предыдущем абзаце, а еще пять вариантов этого способа описаны ниже.
Второй вариант способа схож с первым и отличается тем, что получают дополнительные данные, к которым относятся данные о расположении вышеупомянутых транспортных средств и/или данные о движении вышеупомянутых транспортных средств и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами и какой-либо поверхностью и/или данные о турбулентном следе, создаваемом каким-либо из вышеупомянутых транспортных средств, и/или данные о форме и/или покрытии по меньшей мере двух не идентичных транспортных средств, из числа вышеупомянутых транспортных средств, и/или данные о том, насколько заметны для какого-либо определенного типа средств обнаружения по меньшей мере два не идентичных транспортных средства, из числа вышеупомянутых транспортных средств, и/или другие данные; при этом вышеупомянутые дополнительные данные используют в процессе вышеупомянутого определения; при этом вышеупомянутое определение осуществляют с применением дополнительных требований к вышеупомянутому варианту расположения транспортных средств; при этом вышеупомянутые дополнительные требования заключаются в том, что расстояние между вышеупомянутыми транспортными средствами должно быть не меньше определенной величины и не больше другой определенной величины, и/или в том, что расстояние между вышеупомянутыми транспортными средствами и какой-либо поверхностью должно быть не меньше определенной величины и/или не больше другой определенной величины, и/или в том, что ни одно из вышеупомянутых транспортных средств не должно находиться в турбулентном следе, создаваемом другим транспортным средством, и/или в том, что наиболее крупное из вышеупомянутых транспортных средств должно быть ближе к вышеупомянутым средствам обнаружения, чем остальные вышеупомянутые транспортные средства, и/или в том, что то из вышеупомянутых транспортных средств, форма и/или покрытие которого делает это транспортное средство наименее заметным из вышеупомянутых транспортных средств для какого-либо определенного типа средств обнаружения, должно быть ближе к средствам обнаружения этого типа, чем остальные вышеупомянутые транспортные средства, и/или вышеупомянутые дополнительные требования заключаются в чем-то другом.
Третий вариант способа схож со вторым и отличается тем, что вышеупомянутым вычислительным устройством или с применением вышеупомянутого вычислительного устройства вычисляют, находятся ли вышеупомянутые транспортные средства в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, и/или через какой промежуток времени вышеупомянутые транспортные средства предположительно попадут в эту зону; при этом вышеупомянутое вычисление осуществляют с применением вышеупомянутых данных о средствах обнаружения и с применением вышеупомянутых дополнительных данных; при этом вышеупомянутое определение и/или вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, осуществляют только в случае, если в результате вышеупомянутого вычисления было установлено, что вышеупомянутые транспортные средства находятся в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, или что вышеупомянутые транспортные средства предположительно попадут в эту зону в течение промежутка времени, величина которого меньше определенной величины.
Четвертый вариант способа может быть схож со вторым или с третьим и отличается тем, что в процессе вышеупомянутого определения определяют такой вариант расположения вышеупомянутых транспортных средств, при котором геометрический центр по меньшей мере двух из них находится на одной условной линии с по меньшей мере одним из вышеупомянутых средств обнаружения и/или с поверхностью, отражающей излучение по меньшей мере одного из вышеупомянутых средств обнаружения.
Пятый вариант способа может быть схож со вторым или с третьим и отличается тем, что в процессе вышеупомянутого определения заранее определяют по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяют для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, осуществляют в тот промежуток времени и/или на том участке пути, для которого определили этот вариант расположения, или до этого промежутка времени и/или до достижения этого участка пути.
Шестой вариант способа схож с четвертым и отличается тем, что в процессе вышеупомянутого определения заранее определяют по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяют для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, осуществляют в тот промежуток времени и/или на том участке пути, для которого определили этот вариант расположения, или до этого промежутка времени и/или до достижения этого участка пути.
Устройство, реализующее способ уменьшения заметности группы транспортных средств, состоит из вычислительного устройства, выполненного с возможностью получать необходимые данные об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а также осуществлять с применением этих данных определение такого варианта расположения двух или более транспортных средств относительно друг друга и/или относительно вышеупомянутых средств обнаружения и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что в случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения вышеупомянутое вычислительное устройство осуществляет действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым вычислительным устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств и/или создание и вывод соответствующих рекомендаций и/или другие действия; при этом вышеупомянутые данные о средствах обнаружения содержат данные о движении вышеупомянутых средств обнаружения и/или об их типе и/или о наблюдаемой ими части пространства и/или о направлении распространения их излучения и/или об их параметрах работы и/или об их расположении относительно вышеупомянутых транспортных средств и/или относительно чего-то другого и/или другие данные; при этом вышеупомянутое вычислительное устройство выполнено в форме ЭВМ или в форме вычислительного устройства, являющегося частью автопилота, или в форме другого вычислительного устройства.
Устройство, реализующее способ уменьшения заметности группы транспортных средств, может быть выполнено во множестве вариантов. Первый, базовый вариант этого устройства описан выше, в предыдущем абзаце, а еще пять вариантов этого устройства описаны ниже.
Второй вариант устройства схож с первым и отличается тем, что вышеупомянутое вычислительное устройство выполнено с возможностью получать дополнительные данные, к которым относятся данные о расположении вышеупомянутых транспортных средств и/или данные о движении вышеупомянутых транспортных средств и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами и какой-либо поверхностью и/или данные о турбулентном следе, создаваемом каким-либо из вышеупомянутых транспортных средств, и/или данные о форме и/или покрытии по меньшей мере двух не идентичных транспортных средств, из числа вышеупомянутых транспортных средств, и/или данные о том, насколько заметны для какого-либо определенного типа средств обнаружения по меньшей мере два не идентичных транспортных средства, из числа вышеупомянутых транспортных средств, и/или другие данные; при этом вышеупомянутое вычислительное устройство выполнено с возможностью использовать вышеупомянутые дополнительные данные в процессе вышеупомянутого определения; при этом вышеупомянутое вычислительное устройство выполнено с возможностью осуществлять вышеупомянутое определение с применением дополнительных требований к вышеупомянутому варианту расположения транспортных средств; при этом вышеупомянутые дополнительные требования заключаются в том, что расстояние между вышеупомянутыми транспортными средствами должно быть не меньше определенной величины и не больше другой определенной величины, и/или в том, что расстояние между вышеупомянутыми транспортными средствами и какой-либо поверхностью должно быть не меньше определенной величины и/или не больше другой определенной величины, и/или в том, что ни одно из вышеупомянутых транспортных средств не должно находиться в турбулентном следе, создаваемом другим транспортным средством, и/или в том, что наиболее крупное из вышеупомянутых транспортных средств должно быть ближе к вышеупомянутым средствам обнаружения, чем остальные вышеупомянутые транспортные средства, и/или в том, что то из вышеупомянутых транспортных средств, форма и/или покрытие которого делает это транспортное средство наименее заметным из вышеупомянутых транспортных средств для какого-либо определенного типа средств обнаружения, должно быть ближе к средствам обнаружения этого типа, чем остальные вышеупомянутые транспортные средства, и/или вышеупомянутые дополнительные требования заключаются в чем-то другом.
Третий вариант устройства схож со вторым и отличается тем, что вышеупомянутое вычислительное устройство выполнено с возможностью вычислять, находятся ли вышеупомянутые транспортные средства в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, и/или через какой промежуток времени вышеупомянутые транспортные средства предположительно попадут в эту зону; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутое вычисление с применением вышеупомянутых данных о средствах обнаружения и с применением вышеупомянутых дополнительных данных; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутое определение и/или вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, только в случае, если в результате вышеупомянутого вычисления было установлено, что вышеупомянутые транспортные средства находятся в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, или что вышеупомянутые транспортные средства предположительно попадут в эту зону в течение промежутка времени, величина которого меньше определенной величины.
Четвертый вариант устройства может быть схож со вторым или с третьим и отличается тем, что вышеупомянутое вычислительное устройство выполнено с возможностью определять в процессе вышеупомянутого определения такой вариант расположения вышеупомянутых транспортных средств, при котором геометрический центр по меньшей мере двух из них находится на одной условной линии с по меньшей мере одним из вышеупомянутых средств обнаружения и/или с поверхностью, отражающей излучение по меньшей мере одного из вышеупомянутых средств обнаружения.
Пятый вариант устройства может быть схож со вторым или с третьим и отличается тем, что вышеупомянутое вычислительное устройство выполнено с возможностью заранее определять в процессе вышеупомянутого определения по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяется для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, в тот промежуток времени и/или на том участке пути, для которого был определен этот вариант расположения, или до этого промежутка времени и/или до достижения этого участка пути.
Шестой вариант устройства схож с четвертым и отличается тем, что вышеупомянутое вычислительное устройство выполнено с возможностью заранее определять в процессе вышеупомянутого определения по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяется для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, в тот промежуток времени и/или на том участке пути, для которого был определен этот вариант расположения, или до этого промежутка времени и/или до достижения этого участка пути.
Ниже изложено описание функционирования первого, базового варианта устройства, реализующего одну из форм первого, базового варианта способа уменьшения заметности группы транспортных средств.
В начале, устройство, реализующее способ уменьшения заметности группы транспортных средств, получает необходимые данные об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а затем осуществляет с применением этих данных определение такого варианта расположения двух или более транспортных средств относительно друг друга и/или относительно вышеупомянутых средств обнаружения и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения. В случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения вышеупомянутое устройство осуществляет действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств и/или создание и вывод соответствующих рекомендаций и/или другие действия.
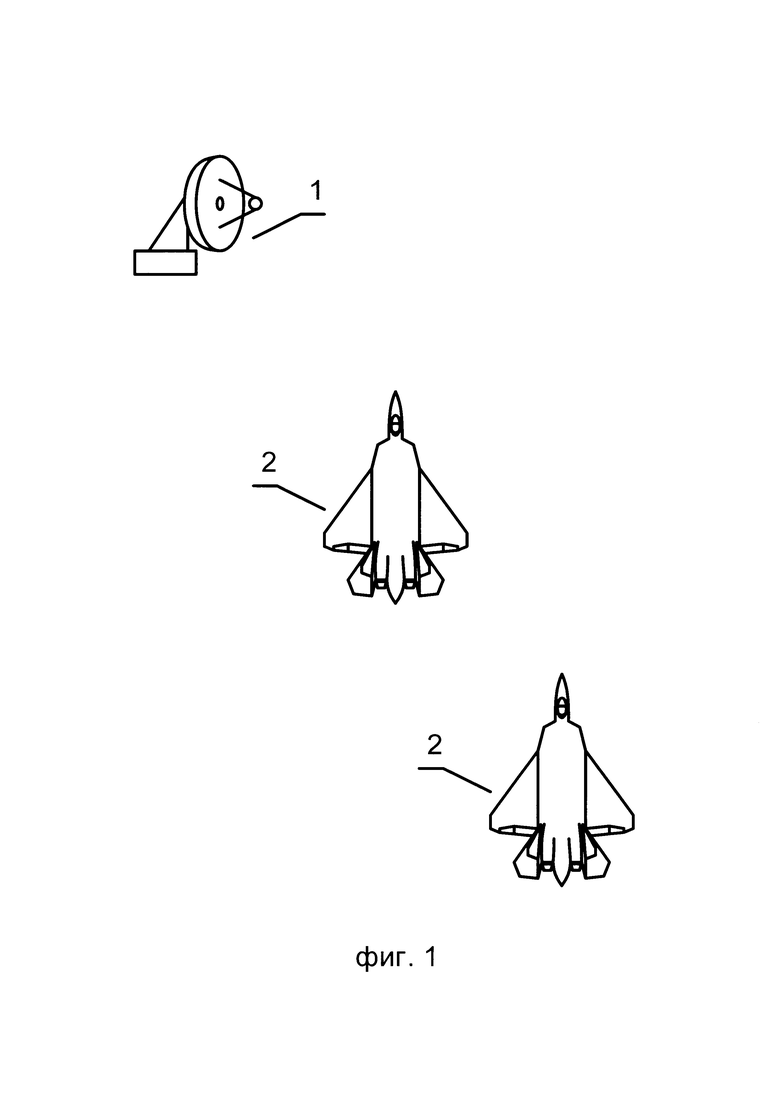
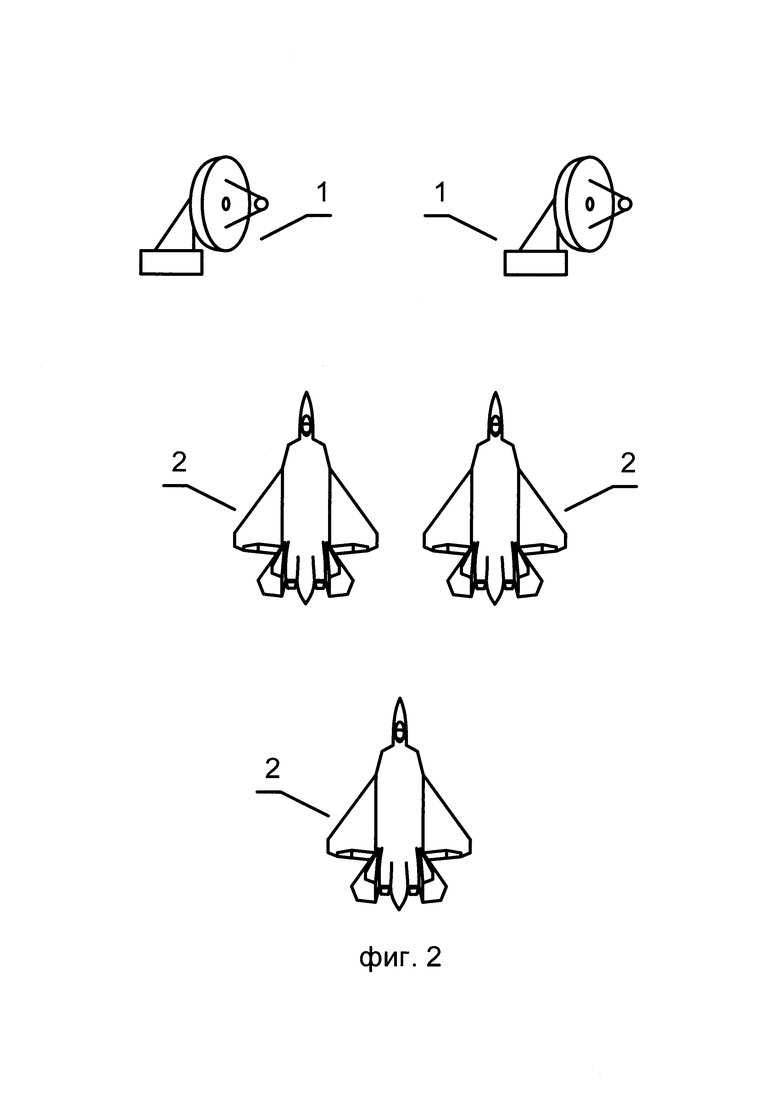
На схемах изображены такие варианты расположения транспортных средств относительно вышеупомянутых средств обнаружения и относительного друг друга, которые могут быть определены в процессе вышеупомянутого определения, осуществляемого в процессе вышеописанного функционирования устройства, реализующего способ уменьшения заметности группы транспортных средств. Вышеупомянутые транспортные средства изображены на схемах в виде самолетов. Далее в тексте описания, до раздела «Технический результат», вышеупомянутые транспортные средства обозначаются как «самолеты». Вышеупомянутые средства обнаружения изображены на схемах в виде радаров. Далее в тексте описания, до раздела «Технический результат», вышеупомянутые средства обнаружения обозначаются как «радары». На схемах цифрой 1 обозначены радары, а цифрой 2 обозначены самолеты. На фигуре 1 изображены один радар и два летящих самолета, при этом ближайший к радару самолет расположен между радаром и вторым (самым далеким от радара) самолетом, благодаря чему ближайший к радару самолет способен закрывать второй самолет от излучения, исходящего от радара, в результате чего второй самолет находится в слепой зоне радара. На фигуре 2 изображены два радара и три летящих самолета, при этом каждый из двух ближайших к радарам самолетов расположен между ближайшим радаром и третьим (самым далеким от радара) самолетом, благодаря чему два ближайших к радарам самолета способны закрывать третий самолет от излучения, исходящего от радаров, в результате чего третий самолет находится в слепой зоне обоих радаров.
Технический результат
Предлагаемое изобретение обеспечивает уменьшение заметности группы транспортных средств и части транспортных средств, входящих в состав группы транспортных средств. Предлагаемое изобретение способно сделать группу транспортных средств и часть транспортных средств, входящих в состав группы транспортных средств, незаметной или менее заметной для большинства известных средств обнаружения, включая: радиолокационные средства обнаружения, акустические средства обнаружения, тепловизионные средства обнаружения, оптические средства обнаружения, а также некоторые другие типы средств обнаружения.
Кроме того, предлагаемое изобретение обеспечивает сокрытие численности транспортных средств, входящих в состав группы транспортных средств, от средств обнаружения противника, что обеспечивает существенное преимущество, так как для адекватного реагирования (например, для отправки оптимального количества перехватчиков на перехват вышеупомянутых транспортных средств) противнику необходимо знать количество этих транспортных средств.
Более того, при применении предлагаемого изобретения для смешанной группы транспортных средств, часть из которых имеет форму и/или покрытие, обеспечивающие уменьшение заметности, а часть не имеет таких формы и покрытия, но соответствует некоторым требованиям, предлагаемое изобретение, при определенных условиях, делает эту группу транспортных средств не менее малозаметной или незаметной, чем если бы все транспортные средства в ней имели вышеупомянутые форму и покрытие. Другими словами, предлагаемое изобретение позволяет во многих случаях обеспечить малозаметность или незаметность транспортных средств, форма и покрытие которых не обеспечивает уменьшение заметности. Это весьма полезно, ведь, например, в современных ВВС даже технически развитых стран только часть транспортных средств имеют форму и/или покрытие, обеспечивающие уменьшение заметности, а остальные транспортные средства обычно имеют ряд преимуществ перед транспортными средствами, форма и/или покрытие которых обеспечивает уменьшение заметности, включая такие преимущества, как меньшая себестоимость, повышенная маневренность, повышенная максимальная скорость, повышенная адаптивность, а также ряд других преимуществ.
Кроме того, предлагаемое изобретение обеспечивает сокрытие информации о типе части транспортных средств какой-либо группы, что весьма полезно в случаях применения смешанных групп транспортных средств, содержащих транспортные средства различного назначения, так как мешает противнику догадаться, какую боевую задачу решают вышеупомянутые транспортные средства.
Обеспечивая вышеописанный технический результат, предлагаемое изобретение повышает вероятность успешного выполнения боевых задач и уменьшает вероятность поражения транспортных средств, применяющих предлагаемое изобретение.
Себестоимость внедрения предлагаемого изобретения весьма мала. Во многих случаях внедрение предлагаемого изобретения потребует лишь создания и внедрения соответствующего программного обеспечения.
Изобретение относится к способам уменьшения заметности транспортных средств и к устройствам, реализующим эти способы. Способ уменьшения заметности группы транспортных средств включает получение необходимых данных об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а также осуществляемое вычислительным устройством или с применением вычислительного устройства определение такого варианта расположения двух или более транспортных средств относительно друг друга, и/или относительно вышеупомянутых средств обнаружения, и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения; при этом в случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения осуществляют действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым вычислительным устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств, и/или создание и вывод соответствующих рекомендаций, и/или другие действия; при этом вышеупомянутое определение осуществляют с применением вышеупомянутых данных о средствах обнаружения; при этом вышеупомянутые данные о средствах обнаружения содержат данные о движении вышеупомянутых средств обнаружения, и/или об их типе, и/или о наблюдаемой ими части пространства, и/или о направлении распространения их излучения, и/или об их параметрах работы, и/или об их расположении относительно вышеупомянутых транспортных средств и/или относительно чего-то другого, и/или другие данные; при этом в качестве вышеупомянутого вычислительного устройства применяют ЭВМ или вычислительное устройство, являющееся частью автопилота, или другое вычислительное устройство. Устройство, реализующее способ уменьшения заметности группы транспортных средств, состоит из вычислительного устройства, выполненного с возможностью получать необходимые данные об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а также осуществлять с применением этих данных определение такого варианта расположения двух или более транспортных средств относительно друг друга, и/или относительно вышеупомянутых средств обнаружения, и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что в случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения вышеупомянутое вычислительное устройство осуществляет действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым вычислительным устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств, и/или создание и вывод соответствующих рекомендаций, и/или другие действия; при этом вышеупомянутые данные о средствах обнаружения содержат данные о движении вышеупомянутых средств обнаружения, и/или об их типе, и/или о наблюдаемой ими части пространства, и/или о направлении распространения их излучения, и/или об их параметрах работы, и/или об их расположении относительно вышеупомянутых транспортных средств и/или относительно чего-то другого и/или другие данные; при этом вышеупомянутое вычислительное устройство выполнено в форме ЭВМ, или в форме вычислительного устройства, являющегося частью автопилота, или в форме другого вычислительного устройства. Техническим результатом является уменьшение заметности группы транспортных средств и части транспортных средств, входящих в состав группы транспортных средств, а также сокрытие численности транспортных средств этой группы и сокрытие информации о типе части транспортных средств этой группы. 2 н. и 10 з.п. ф-лы, 2 ил.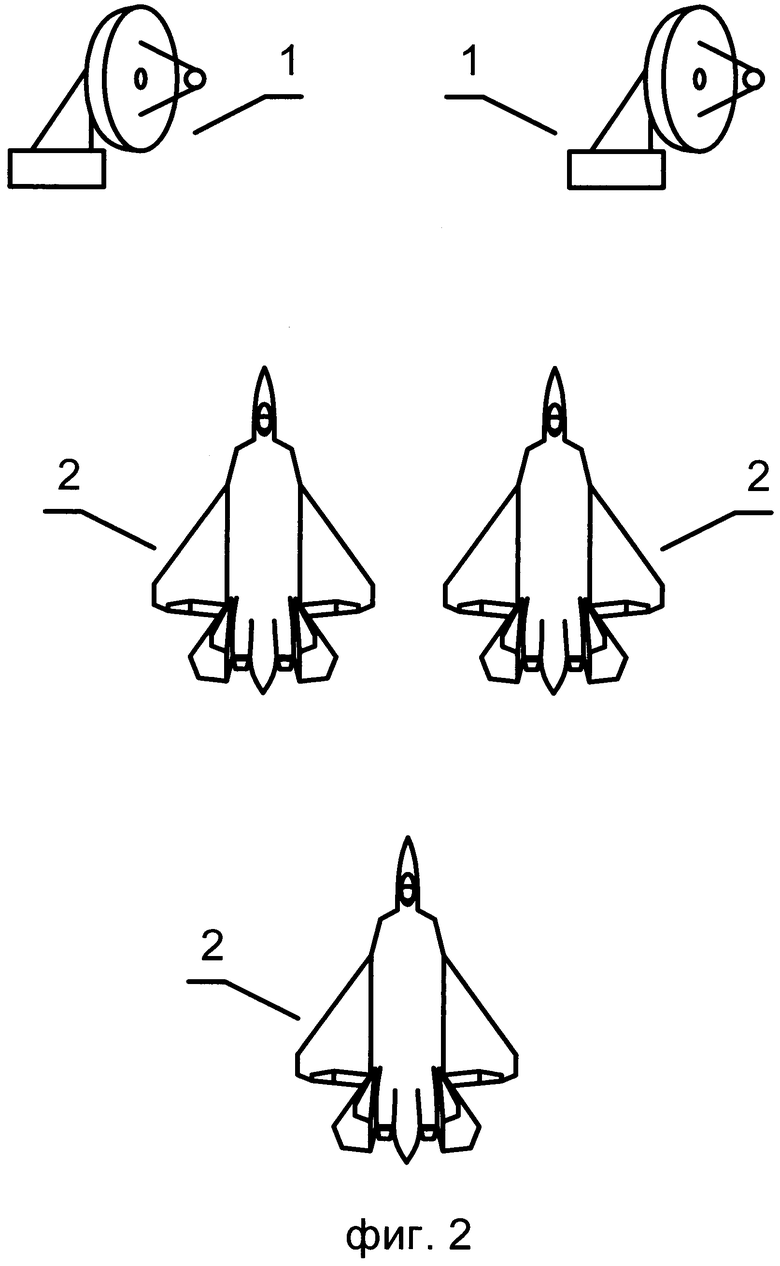
1. Способ уменьшения заметности группы транспортных средств, включающий получение необходимых данных об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а также осуществляемое вычислительным устройством или с применением вычислительного устройства определение такого варианта расположения двух или более транспортных средств относительно друг друга, и/или относительно вышеупомянутых средств обнаружения, и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения; при этом в случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения осуществляют действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым вычислительным устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств, и/или создание и вывод соответствующих рекомендаций, и/или другие действия; при этом вышеупомянутое определение осуществляют с применением вышеупомянутых данных о средствах обнаружения; при этом вышеупомянутые данные о средствах обнаружения содержат данные о движении вышеупомянутых средств обнаружения, и/или об их типе, и/или о наблюдаемой ими части пространства, и/или о направлении распространения их излучения, и/или об их параметрах работы, и/или об их расположении относительно вышеупомянутых транспортных средств и/или относительно чего-то другого, и/или другие данные; при этом в качестве вышеупомянутого вычислительного устройства применяют ЭВМ или вычислительное устройство, являющееся частью автопилота, или другое вычислительное устройство.
2. Способ по п. 1, отличающийся тем, что получают дополнительные данные, к которым относятся данные о расположении вышеупомянутых транспортных средств, и/или данные о движении вышеупомянутых транспортных средств, и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами, и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами и какой-либо поверхностью, и/или данные о турбулентном следе, создаваемом каким-либо из вышеупомянутых транспортных средств, и/или данные о форме и/или покрытии по меньшей мере двух не идентичных транспортных средств, из числа вышеупомянутых транспортных средств, и/или данные о том, насколько заметны для какого-либо определенного типа средств обнаружения по меньшей мере два не идентичных транспортных средства из числа вышеупомянутых транспортных средств, и/или другие данные; при этом вышеупомянутые дополнительные данные используют в процессе вышеупомянутого определения; при этом вышеупомянутое определение осуществляют с применением дополнительных требований к вышеупомянутому варианту расположения транспортных средств; при этом вышеупомянутые дополнительные требования заключаются в том, что расстояние между вышеупомянутыми транспортными средствами должно быть не меньше определенной величины и не больше другой определенной величины, и/или в том, что расстояние между вышеупомянутыми транспортными средствами и какой-либо поверхностью должно быть не меньше определенной величины и/или не больше другой определенной величины, и/или в том, что ни одно из вышеупомянутых транспортных средств не должно находиться в турбулентном следе, создаваемом другим транспортным средством, и/или в том, что наиболее крупное из вышеупомянутых транспортных средств должно быть ближе к вышеупомянутым средствам обнаружения, чем остальные вышеупомянутые транспортные средства, и/или в том, что то из вышеупомянутых транспортных средств, форма и/или покрытие которого делает это транспортное средство наименее заметным из вышеупомянутых транспортных средств для какого-либо определенного типа средств обнаружения, должно быть ближе к средствам обнаружения этого типа, чем остальные вышеупомянутые транспортные средства, и/или вышеупомянутые дополнительные требования заключаются в чем-то другом.
3. Способ по п. 2, отличающийся тем, что вышеупомянутым вычислительным устройством или с применением вышеупомянутого вычислительного устройства вычисляют, находятся ли вышеупомянутые транспортные средства в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, и/или через какой промежуток времени вышеупомянутые транспортные средства предположительно попадут в эту зону; при этом вышеупомянутое вычисление осуществляют с применением вышеупомянутых данных о средствах обнаружения и с применением вышеупомянутых дополнительных данных; при этом вышеупомянутое определение и/или вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, осуществляют только в случае, если в результате вышеупомянутого вычисления было установлено, что вышеупомянутые транспортные средства находятся в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, или что вышеупомянутые транспортные средства предположительно попадут в эту зону в течение промежутка времени, величина которого меньше определенной величины.
4. Способ по п. 2 или 3, отличающийся тем, что в процессе вышеупомянутого определения определяют такой вариант расположения вышеупомянутых транспортных средств, при котором геометрический центр по меньшей мере двух из них находится на одной условной линии с по меньшей мере одним из вышеупомянутых средств обнаружения и/или с поверхностью, отражающей излучение по меньшей мере одного из вышеупомянутых средств обнаружения.
5. Способ по п. 2 или 3, отличающийся тем, что в процессе вышеупомянутого определения заранее определяют по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяют для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, осуществляют в тот промежуток времени и/или на том участке пути, для которого определили этот вариант расположения, или до этого промежутка времени и/или до достижения этого участка пути.
6. Способ по п. 4, отличающийся тем, что в процессе вышеупомянутого определения заранее определяют по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяют для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, осуществляют в тот промежуток времени и/или на том участке пути, для которого определили этот вариант расположения, или до этого промежутка времени, и/или до достижения этого участка пути.
7. Устройство, реализующее способ уменьшения заметности группы транспортных средств, состоящее из вычислительного устройства, выполненного с возможностью получать необходимые данные об известных и/или предполагаемых средствах обнаружения, подконтрольных противнику или условному либо потенциальному противнику, а также осуществлять с применением этих данных определение такого варианта расположения двух или более транспортных средств относительно друг друга, и/или относительно вышеупомянутых средств обнаружения, и/или относительно чего-то другого, при котором эти транспортные средства или по меньшей мере одно из этих транспортных средств незаметно или малозаметно для вышеупомянутых средств обнаружения; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что в случае, если существующее расположение вышеупомянутых транспортных средств отличается от варианта расположения, определенного в процессе вышеупомянутого определения, то в процессе и/или после вышеупомянутого определения вышеупомянутое вычислительное устройство осуществляет действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения; при этом к вышеупомянутым действиям, направленным на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, относятся создание соответствующих команд вышеупомянутым вычислительным устройством и передача этих команд системе управления по меньшей мере одного из вышеупомянутых транспортных средств, и/или создание и вывод соответствующих рекомендаций, и/или другие действия; при этом вышеупомянутые данные о средствах обнаружения содержат данные о движении вышеупомянутых средств обнаружения, и/или об их типе, и/или о наблюдаемой ими части пространства, и/или о направлении распространения их излучения, и/или об их параметрах работы, и/или об их расположении относительно вышеупомянутых транспортных средств и/или относительно чего-то другого, и/или другие данные; при этом вышеупомянутое вычислительное устройство выполнено в форме ЭВМ или в форме вычислительного устройства, являющегося частью автопилота, или в форме другого вычислительного устройства.
8. Устройство по п. 7, отличающееся тем, что вышеупомянутое вычислительное устройство выполнено с возможностью получать дополнительные данные, к которым относятся данные о расположении вышеупомянутых транспортных средств, и/или данные о движении вышеупомянутых транспортных средств, и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами, и/или данные о минимально допустимом расстоянии между вышеупомянутыми транспортными средствами и какой-либо поверхностью, и/или данные о турбулентном следе, создаваемом каким-либо из вышеупомянутых транспортных средств, и/или данные о форме и/или покрытии по меньшей мере двух не идентичных транспортных средств из числа вышеупомянутых транспортных средств, и/или данные о том, насколько заметны для какого-либо определенного типа средств обнаружения по меньшей мере два не идентичных транспортных средства, из числа вышеупомянутых транспортных средств, и/или другие данные; при этом вышеупомянутое вычислительное устройство выполнено с возможностью использовать вышеупомянутые дополнительные данные в процессе вышеупомянутого определения; при этом вышеупомянутое вычислительное устройство выполнено с возможностью осуществлять вышеупомянутое определение с применением дополнительных требований к вышеупомянутому варианту расположения транспортных средств; при этом вышеупомянутые дополнительные требования заключаются в том, что расстояние между вышеупомянутыми транспортными средствами должно быть не меньше определенной величины и не больше другой определенной величины, и/или в том, что расстояние между вышеупомянутыми транспортными средствами и какой-либо поверхностью должно быть не меньше определенной величины и/или не больше другой определенной величины, и/или в том, что ни одно из вышеупомянутых транспортных средств не должно находиться в турбулентном следе, создаваемом другим транспортным средством, и/или в том, что наиболее крупное из вышеупомянутых транспортных средств должно быть ближе к вышеупомянутым средствам обнаружения, чем остальные вышеупомянутые транспортные средства, и/или в том, что то из вышеупомянутых транспортных средств, форма и/или покрытие которого делает это транспортное средство наименее заметным из вышеупомянутых транспортных средств для какого-либо определенного типа средств обнаружения, должно быть ближе к средствам обнаружения этого типа, чем остальные вышеупомянутые транспортные средства, и/или вышеупомянутые дополнительные требования заключаются в чем-то другом.
9. Устройство по п. 8, отличающееся тем, что вышеупомянутое вычислительное устройство выполнено с возможностью вычислять, находятся ли вышеупомянутые транспортные средства в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, и/или через какой промежуток времени вышеупомянутые транспортные средства предположительно попадут в эту зону; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутое вычисление с применением вышеупомянутых данных о средствах обнаружения и с применением вышеупомянутых дополнительных данных; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутое определение и/или вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать варианту расположения, определенному в процессе вышеупомянутого определения, только в случае, если в результате вышеупомянутого вычисления было установлено, что вышеупомянутые транспортные средства находятся в зоне, в которой они могут быть обнаружены вышеупомянутыми средствами обнаружения, или что вышеупомянутые транспортные средства предположительно попадут в эту зону в течение промежутка времени, величина которого меньше определенной величины.
10. Устройство по п. 8 или 9, отличающееся тем, что вышеупомянутое вычислительное устройство выполнено с возможностью определять в процессе вышеупомянутого определения такой вариант расположения вышеупомянутых транспортных средств, при котором геометрический центр по меньшей мере двух из них находится на одной условной линии с по меньшей мере одним из вышеупомянутых средств обнаружения и/или с поверхностью, отражающей излучение по меньшей мере одного из вышеупомянутых средств обнаружения.
11. Устройство по п. 8 или 9, отличающееся тем, что вышеупомянутое вычислительное устройство выполнено с возможностью заранее определять в процессе вышеупомянутого определения по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяется для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, в тот промежуток времени и/или на том участке пути, для которого был определен этот вариант расположения, или до этого промежутка времени, и/или до достижения этого участка пути.
12. Устройство по п. 10, отличающееся тем, что вышеупомянутое вычислительное устройство выполнено с возможностью заранее определять в процессе вышеупомянутого определения по меньшей мере два вышеупомянутых варианта расположения, каждый из которых определяется для конкретного участка пути вышеупомянутых транспортных средств и/или для конкретного промежутка времени; при этом вышеупомянутое вычислительное устройство выполнено таким образом, что осуществляет вышеупомянутые действия, направленные на то, чтобы расположение вышеупомянутых транспортных средств стало соответствовать какому-либо из вышеупомянутых вариантов расположения, определенных в процессе вышеупомянутого определения, в тот промежуток времени и/или на том участке пути, для которого был определен этот вариант расположения, или до этого промежутка времени, и/или до достижения этого участка пути.
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| СПОСОБ КОРРЕКТИРОВКИ ОБЛИКА ЛЕТАТЕЛЬНОГО АППАРАТА ПО ВЕЛИЧИНЕ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТИ | 2014 |
|
RU2562408C1 |
| СПОСОБ ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ РАКЕТ, ОСНАЩЕННЫХ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1998 |
|
RU2141094C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОГО ОБЪЕКТА ОТ ОБНАРУЖЕНИЯ ЕГО РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1999 |
|
RU2157029C1 |

