Изобретение относится к области авиационной техники, а именно к системам навигации, самолетовождения, управления воздушным движением и наблюдения за подвижными объектами на земной и водной поверхности.
Известен способ автоматического зависимого наблюдения широковещательного типа - АЗН-В, описанный в книге «Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации»: Учебное пособие / P.M.Ахмедов, А.А.Бибутов, А.В.Васильев и др.; под ред. С.Г.Пятко и А.И.Красова. СПб.: Политехника, 2004. - с.191-203, при котором воздушные суда (ВС) и другие подвижные объекты, на которых устанавливают спутниковые навигационные системы, от приемников которых получают собственные координаты и точное единое время, и состоящий в том, что на воздушных судах и на других подвижных объектах устанавливают радиостанции, которые передают в общий канал сообщения о своих координатах, также дополнительную информацию, причем передачу каждая радиостанция ведет в определенный заранее интервал на оси единого времени, а приемник каждой радиостанции принимает сообщения от радиостанций, которые находятся в пределах радиовидимости, которые содержат данные о координатах передающей радиостанции, а указанные координаты вместе с дополнительной информацией используют для отображения на индикаторе воздушной обстановки.
Существенный недостаток указанного аналога состоит в слабой помехоустойчивости и отсутствии защиты от специально организованных помех и искажения и передачи недостоверных данных.
Известна также система автоматического зависимого наблюдения (АЗН) для слежения за воздушными судами по патенту США № US 5570095, МПК G01S 5/00; G01S 5/14; G01S 5/00; G01S 5/14, опубл. 1996-10-29 (V3.espacenet.com), которая включает навигационный приемник GPS для определения местоположения воздушного судна, транспондер режима S для передачи данных местоположения этого судна, принимающую радиостанцию режима S для приема координатной информации воздушных судов и для определения местоположения передающего воздушного судна относительно других воздушных судов и на земле. Координатная информация режима S - это вещательная передача в виде сквиттера по случайному временному принципу с имеющейся средней скоростью передачи или в ответ на сигнал запроса принимающей радиостанции режима S. Приемником режима S может быть другое воздушное судно, наземная радиостанция на маршруте и/или наземная радиостанция на аэродроме. Указанная система имеет недостатки, типичные для систем наблюдения, построенных по принципу "запрос-ответ", а именно: относительно малые пропускная способность, доступность и информативность, а также слабая защищенность от действия случайных и специально организованных помех, приводящих к искажению принимаемых данных.
Наиболее близким по своей технической сущности к заявленному является система индикации положения по заявке РФ №93058671/09, МПК 7 G08G 5/04, опубл. 1998.04.10 (www.fips.ru).
Способ-прототип заключается в том, что множество движущихся объектов, таких как самолеты, географическое положение которых определено посредством приема сигналов от множества геометрически распределенных передатчиков, имеющих известное положение, с каждой участвующей радиостанцией, имеющей передатчик для излучения в общий радиоканал сигналов, содержащих данные о ее собственном географическом положении, средство памяти, предназначенное для запоминания информации о других участвующих радиостанциях. Каждая радиостанция содержит блок определения оси времени, контролирующий указанную ось времени по отношению к указанному множеству геометрически распределенных передатчиков и определяющий интервалы времени, которые пронормированы, пронумерованы и формируют общий, точно заданный повторяющийся максимальный кадр, средство для занятия свободного блока времени в каждом максимальном кадре и для автономной передачи в нем сигналов положения в общий радиоканал, причем сигналы принимают от радиостанций, расположенных в пределах прямой радиовидимости, а передача ведется в свободных блоках, которые определяются радиостанцией на предыдущем кадре или назначаются приказом наземной радиостанции.
Существенным недостатком прототипа является незащищенность указанного способа от искажения принимаемых данных, вызванного влиянием как случайных помех в радиоканале, ошибок при кодировании и декодировании сигналов в передающем и приемном трактах, а также и специально организованных помехах и преднамеренной передачи заведомо ложных данных о координатах.
Недостаточная защита от действия случайных и специально организованных помех приводит к следующему.
Искажаются данные о координатах объектов наблюдения.
На экране индикатора (видеомонитора) отметка смещается относительно истинного положения объекта, передающего свои данные.
Специально организованная передача одной из радиостанций заведомо неверных координат приводит к появлению на экране индикатора ложной отметки. Указанное выше приводит к искажению картины реальной обстановки и, как следствие, к принятию неправильных, неоптимальных и даже катастрофических решений.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Целью изобретения является устранение этих недостатков, расширение возможностей системы-прототипа, повышение информативности и обеспечение достоверности индицируемых данных. Кроме того, целью изобретения является разработка способа индикации положения совокупности объектов движущихся в воздушном пространстве, а также по земной или водной поверхности, обеспечение повышения информативности сигналов, достоверности данных обнаружения отметок от ложных целей, а также вычисления истинных координат источника ложных сообщений и выдачи соответствующих сигналов. Указанная цель достигается тем, что подвижные и стационарные объекты в соответствии с прототипом оборудуют радиостанциями, передающими в общий, а именно доступный всем остальным, радиоканал последовательности сигналов единообразной формы, которые представляют собой закодированные сообщения о координатах своего местоположения и свой идентификатор, и принимающими такие сообщения от других радиостанций.
В отличие от известных способов-аналогов и прототипа на принимающей сообщение радиостанции по точным часам фиксируют момент приема сообщения, а по заранее известному моменту начала временного отрезка передачи рассчитывают задержку приема сообщения, вычитают из этой величины заранее известную постоянную систематическую составляющую временной задержки.
По полученной в результате величине рассчитывают псевдодальность, величину которой сравнивают с расстоянием между принимающей и передающей радиостанциями, при этом обнаруженное несоответствие расценивают как признак недостоверности сообщения. При установлении указанного несоответствия достаточным количеством автономных радиостанций по измеренным псевдодальностям вычисляют оценки истинных координат радиостанции-источника ложного сообщения.
В качестве средства индикации положения в пространстве каждого из совокупности наблюдаемых объектов, оборудованных приемопередающими радиостанциями, используют дисплей и средства звуковой и речевой сигнализации, причем положение радиостанций, сообщающих недостоверную информацию о своих координатах, а также ложные отметки и истинное положение источников ложной информации отображают в виде символов, которые по форме и цвету отличаются от изображений радиостанций, передающих достоверную информацию.
Благодаря указанной новой совокупности существенных признаков за счет вычисления по величине временной задержки псевдодальности до радиостанции, передающей сообщение о своих координатах, а также дальности, которую рассчитывают по координатам указанной радиостанции, содержащимся в ее сообщении, и путем сравнения полученного таким образом расстояния с соответствующей псевдодальностью устанавливают их различия и принимают решение о недостоверности переданных данных о координатах.
При наличии достаточного числа радиостанций, которые обнаружили недостоверность одного и того же источника информации, принимают решение о том, что указанный источник передает ложную информацию, а соответствующая отметка на индикаторе признается ложной, и с помощью решения соответствующей системы уравнений для псевдодальностей вычисляют истинные координаты источника ложного сообщения, за счет чего достигается повышение информативности и достоверности данных об обстановке, отображаемой на индикаторе в условиях действия случайных и специально организованных помех и преднамеренной передачи заведомо ложных данных, что существенно повышает уровень безопасности движения.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 поясняет обмен информацией между подвижными объектами и базовыми радиостанциями, а также работу спутниковой навигационной системы,
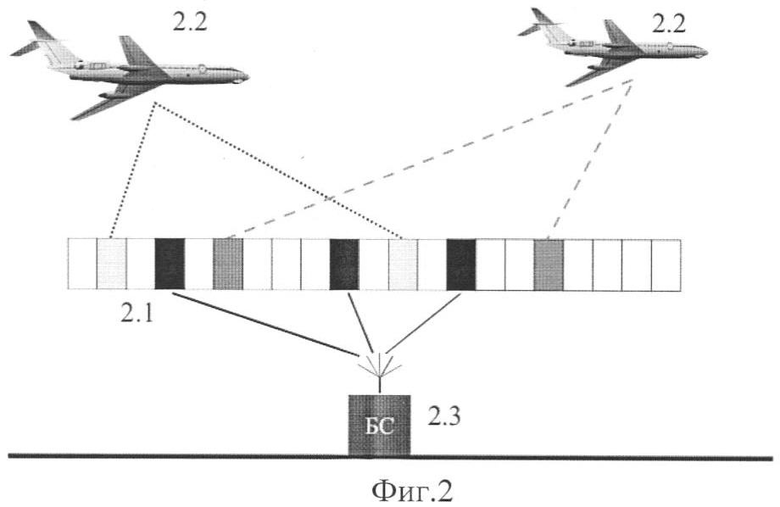
фиг.2 - распределение слотов,
фиг.3 - составляющие временной задержки,
фиг.4 - определение псевдодальностей и оценка истинного положения источника ложной информации,
фиг.5 - структурная схема устройства, реализующего заявленный способ,
фиг.6 - блок-схема алгоритма обработки недостоверных данных о координатах,
фиг.7 - циклограммы работы приемопередающего оборудования.
В условиях непрерывно возрастающей интенсивности полетов, увеличения скорости полетов и пассажировместимости ВС, а также применения новой практики полетов по свободным траекториям обостряется противоречие между требованиями высокого уровня безопасности полетов и техническими возможностями бортовых и наземных средств анализа и отображения обстановки как в воздушном пространстве, так и на земле.
Известные пути решения этой проблемы состоят во включении в состав бортового оборудования приемопередающих радиостанций, работающих в диапазоне УКВ или СВЧ и транслирующих по цифровой линии передачи данных (ЛПД) с временным разделением информацию о своем местоположении и параметров движения, а также прослушивающих эфир и принимающих сообщение от других радиостанций, в том числе от наземных.
Недостаток этих систем заключается в отсутствии контроля за достоверностью полученных данных.
Возможное решение этой проблемы состоит в использовании свойства систем с временным разделением, состоящего в том, что каждая радиостанция должна начинать свою передачу в заранее определенный момент единого времени. Фиксируя момент приема этого сообщения по величине задержки можно вычислить расстояние от передающей до принимающей радиостанции (псевдодальность), выявить степень несоответствия с координатной информацией, содержащейся в принятом сообщении, и выполнить анализ указанного несоответствия и результаты вывести на индикатор.
Эта задача решается в заявленном способе. Наиболее полный эффект применения предлагаемого способа получают при автоматическом зависимом наблюдении широковещательного типа. Возможность реализации заявленного способа с достижением указанного технического результата объясняется следующим образом.
Наиболее высокой точностью определения координат местоположения обладают спутниковые навигационные системы. Причем с их помощью автоматически определяют высоту, а также вычисляют параметры движения, такие как вертикальная скорость, путевая скорость и угол пути (путевой угол). С помощью указанных систем также выполняют синхронизацию бортовых часов, а именно их привязку к шкале единого точного времени.
На каждом ВС устанавливают транспондер, содержащий приемник спутниковой навигационной системы (СНС - GNSS) типа NAVSTAR или ГЛОНАСС. Данные о своем местоположении и параметры движения могут быть получены не только от спутниковой, но также и от навигационных систем другого типа (инерциальных, курсодоплеровских и др.). Обмен информацией между подвижными объектами и базовыми радиостанциями, а также работа спутниковой навигационной системы поясняется на фиг.1. Все приемопередатчики работают на одной частоте так, что ВС и другие объекты наблюдения 1.1, находящиеся в пределах радиовидимости друг от друга, оказываются связанными одним или несколькими радиоканалами 1.2.
Каждое из указанных ВС прослушивает радиоканал, получает координатную информацию о других ВС, находящихся в зоне радиовидимости, и транслирует в радиоканал информацию о своем идентификаторе, о собственных координатах, высоте, скорости и направлении движения и дополнительную информацию. Таким образом, осуществляется принцип "все видят всех". Информацию о собственном положении на подвижных объектах получают с использованием спутников 1.4 или иных навигационных средств.
Процесс распределения отрезков времени поясняется фиг.2. Приемник СНС обеспечивает каждому транспондеру точную привязку к шкале единого времени (UTS). Шкалу единого времени разделяют на временные отрезки или слоты 2.1, определенное количество которых составляют кадры (фреймы) и суперкадры (суперфреймы).
Каждый транспондер прослушивает эфир в пределах кадра и определяет свободные слоты, а именно не занятые другими транспондерами, резервирует их, о чем сообщает в эфир и в последующем транслирует в зарезервированных слотах сообщения о собственных координатах, как показано на фиг.2.
Наряду с участниками движения 2.2, транспондер устанавливают и на наземной базовой радиостанции (БС) 2.3, которую могут располагать, к примеру, в центре управления воздушным движением (УВД), как показано на фиг.1. БС может передавать дифференциальные поправки, синхросигналы точного времени, команды о занятии слотов и иную информацию.
При временном отказе СНС-приемника синхронизация работы транспондера может осуществляться базовой радиостанцией, другими источниками точного времени, находящимся на борту собственного ВС, а также по сигналам транспондеров других ВС.
Среди отметок, отображаемых на экране бортового индикатора и монитора наземной радиостанции, могут быть одна или более ложных. Одной из причин появления указанной ложной отметки является действие случайных радиопомех в общем канале, которые приводят к искажению передаваемых координатных данных. Другая причина состоит в преднамеренной передаче ложной информации, которую специально передает радиостанция, установленная на земле или подвижном объекте.
Для обнаружения каждой ложной отметки и повышения за счет этого помехозащищенности, а именно достоверности отображаемой информации в соответствии с настоящим изобретением дополнительно в каждом транспондере процессор вычисляет псевдодальность до других радиостанций и сравнивает ее с расстоянием до соответствующей радиостанции, которую рассчитывают по координатам, содержащимся в полученном сообщении. Если указанная разность превышает заранее назначенную величину, то указанное сообщение и соответствующую отметку признают недостоверными.
Сигнал, передаваемый в эфир каждой радиостанцией, имеет стандартную форму и представляет собой последовательность модулированных импульсов. Пример реального сигнала приведен в Приложении 1.
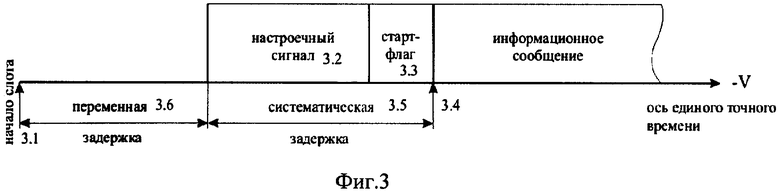
Начало передачи совпадает с моментом на оси единого времени, соответствующим началу отрезка (слота) 3.1, отведенного для передачи, как это показано на фиг.3. Сначала передается настроечный сигнал 3.2 известной длительности, во время которого передатчик выходит на режим передачи, а приемник принимающей радиостанции настраивается на прием. Затем немедленно передают специальную кодовую последовательность, имеющую постоянную длительность - стартовый флаг 3.3, за которым следует закодированное сообщение о координатах объекта, на котором установлена радиостанция, ведущая в данном слоте передачу, а также данные о его параметрах движения идентификатора и дополнительную информацию.
Общее запаздывание приема сообщения 3.4 складывается из следующих составляющих: систематической постоянной задержки 3.5, которая равна длительности настроечной последовательности и старт-флага, а также переменной, к которой относятся запаздывание на распространение электромагнитных волн 3.6, а именно на прохождение расстояния от антенны передающей радиостанции до антенны принимающей радиостанции, а также случайной погрешности, учитывающей запаздывание начала передачи синхронизации, погрешность кодирования координат и измерение времени приема, которые не должны превышать допустимых значений.
В соответствии с изобретением для каждой из N радиостанций, передающих сообщения в общий канал, вычисляют псевдодальность по формуле:
Pis=Cτis,
где Pis - псевдодальность, вычисленная на i-й принимающей радиостанции до s-й передающей;
τis - задержка сигнала на приемном конце относительно начала соответствующего слота за вычетом систематической составляющей τc;
С - скорость распространения электромагнитных волн.
Временной сдвиг, а именно смещение начала пакета на приемном конце, вызванный естественными причинами, представляет всегда запаздывание. В отличие от этого дезинформатор может сдвигать момент начала передачи как в сторону запаздывания, так и в сторону опережения. Таким образом, суммарный временной сдвиг может иметь различный знак.
Заранее вычисляют величину Δp допустимой погрешности как сумму ошибки измерения и кодирования координат и случайной составляющей задержки в радиоканале, умноженной на скорость света (см. Приложение 1). Для снижения риска псевдоложных тревог из-за передачи радиостанцией устаревшей координатной информации следует Δp увеличивать, но необходимо учитывать, что при этом возрастает вероятность пропуска, то есть необнаружения недостоверности принятого сообщения.
На i-й радиостанции по собственным измеренным координатам хi, уi, zi и координатам  ,
,  ,
,  , данные о которых содержатся в принятом от s-ой радиостанции сообщении, рассчитывают расстояние Dis между i-й и s-й радиостанциями в земной прямоугольной системе координат:
, данные о которых содержатся в принятом от s-ой радиостанции сообщении, рассчитывают расстояние Dis между i-й и s-й радиостанциями в земной прямоугольной системе координат:

и вычисляют разность между указанным расстоянием и соответствующей псевдодальностью. Если эта разность превышает по модулю допустимую величину, а именно, если

то принимают решение, что координатная информация, полученная от s-го источника недостоверна, о чем передается соответствующее сообщение, а в качестве дополнительной информации сообщается рассчитанная величина псевдодальности Рis.
На экране индикатора i-ой радиостанции отметку s-ой радиостанции, от которой получена недостоверная информация, помечают специальным символом.
За счет этого повышается достоверность и информативность изображения при искажении сообщений.
Передаваемые координаты должны соответствовать моменту начала слота - временного отрезка, отведенного для данного сообщения.
Источник, специально транслирующий для введения в заблуждение других участников движения данные о виртуальном, а именно несуществующем, объекте может с целью маскировки смещать во времени момент начала передачи указанного ложного сообщения, чтобы псевдодальность соответствовала передаваемым координатам и неравенство (1) не выполнялось. Однако это возможно сделать лишь для одной принимающей радиостанции, в то время как на других, расположенных в несовпадающих точках пространства, отстоящих от указанной на расстоянии не менее Δр, несоответствие будет обнаружено, за счет чего будет повышена защищенность системы наблюдения от специально организованных помех.
Если недостоверность информации зафиксирована не менее чем на четырех принимающих радиостанциях, то в соответствии с изобретением вычисляются истинные пространственные координаты источника ложной информации, а в том случае, когда указанное несоответствие фиксируют лишь на трех принимающих радиостанциях, определяются две координаты источника ложных данных.
Для вычисления указанных пространственных координат xs, уs, zs s-го источника недостоверной информации решают систему из не менее чем m уравнений следующего вида:

где Rs=Cτs - радиус сдвига; τs - неизвестный параметр, имеющий смысл временного сдвига; n - количество радиостанций подвижных и стационарных, обнаруживших недостоверность координатных данных, переданных одной и той же s-ой радиостанцией в одно и то же время в одном и том же сообщении, причем в это число не входят радиостанции, которым присвоен признак недостоверной; m - достаточное количество радиостанций.
Геометрический смысл вычисленных в результате решения системы (2) величин поясняется фиг.4, где указаны псевдодальности до радиостанций, установленных на воздушных судах 4.1, 4.2, 4.4 и базовой радиостанции 4.3, истинное положение s-й радиостанции и радиус сдвига.
Параметр m принимает значение m=4 при наблюдении объектов в трехмерном (3D) пространстве и m=3 для двухмерного (2D) пространства, причем радиостанции из достаточной совокупности объектов наблюдения в случае 3D-пространства не должны располагаться в одной плоскости, а в случае 2D-пространства - на одной прямой. При n<m и/или нарушении указанных условий достаточности решение системы уравнений (2) может не существовать и вычислить оценки истинных координат радиостанции, передавшей недостоверные координаты, невозможно. По величине модуля радиуса сдвига можно судить о причине, вызвавшей сомнения в достоверности переданных координатных данных. В случае если модуль радиуса сдвига велик, т.е. |Rs|>Δp и расстояние между точками с переданными и вычисленными координатами также велико, то наиболее вероятной причиной является преднамеренное искажение информации с целью ввести в заблуждение одного или нескольких наблюдателей и участников движения.
При решении системы уравнений (2) вследствие указанных ранее погрешностей получают лишь оценки истинных координат радиостанции. Потенциальная точность вычислений возрастает с увеличением количества уравнений. При получении очередного сообщения от радиостанции, обнаружившей недостоверность координатной информации, переданной s-ой радиостанцией к системе (2) добавляют соответствующее n+1-e уравнение, а систему вновь решают и получают более точную оценку искомых координат, а также радиуса сдвига. Наращивание системы (2) прекращается, если от s-й радиостанции поступает новое координатное сообщение, а при этом n>m.
Отрезки времени (слоты), в которые радиостанции, обнаружившие недостоверность одного и того же s-ого источника информации, распределяются на оси единого времени различным образом (фиг.2), поэтому сообщения, содержащие координаты обнаружившей радиостанции и замеренные псевдодальности, в приемник поступают не одновременно. Обозначим через ts момент передачи недостоверных данных, а через t1, t2, ..., tn, n≤N, моменты приема сообщения от радиостанций, обнаруживших недостоверность данных s-ой радиостанции, причем указанная последовательность естественным образом упорядочена по возрастанию. Обозначим через θi задержку во времени, θi=ti-ts. Впервые вычислить координаты s-ой радиостанции можно по получении m указанных сообщений, при этом n=m и величина запаздывания не менее θm. За это время объект, на котором установлена s-ая радиостанция, может изменить свое положение в пространстве и вычисленные координаты устареют. Добавление в системе (2) уравнений, соответствующих вновь поступившим сообщениям, как правило, повышает точность решения, но одновременно увеличивается запаздывание θn, причем отображается не текущее положение источника ложной информации, а то, в котором он находился ранее.
Между моментами измерения координат и их передачей в радиоканал проходит некоторое время. Указанная задержка вызывает устаревание информации. При передаче указанная временная задержка замеряется, кодируется и включается в сообщение в виде дополнительного параметра возраста или давности данных, как показано в Приложении 2. На приемном конце параметр давности декодируется и в результате получают интервал времени, соответствующий указанной задержке θi.
В случае наблюдения за движением по земной или водной поверхности, а также в иных случаях, когда перемещение происходит в одной плоскости, а именно радиостанции имеют высоты, мало отличающиеся друг от друга, минимальное число радиостанций m и, соответственно, количество уравнений в системе (2) должно быть не менее трех, а в качестве неизвестных принимают две координаты местоположения источника недостоверных данных и радиус сдвига Rs.
При передаче одной и той же радиостанцией последовательно в разных отрезках времени (слотах) двух и более сообщений, каждое из которых содержит недостоверные координаты, после решения системы (2) вычисляют величины изменений оценок истинных координат и затем известными методами определяют параметры движения объекта-источника ложной информации.
Для хорошо известного цифрового фильтра первого порядка составляющую Vxs полного вектора земной скорости s-ого объекта рассчитывают по рекуррентным формулам, причем остальные составляющие рассчитывают аналогично.



где  ,
,  - вычисленные оценки координаты Xs источника ложных сообщений на моменты времени ts - θ и ts соответственно; θ - интервал времени между предыдущим и последующим моментами, с которыми соотносят указанные оценки;
- вычисленные оценки координаты Xs источника ложных сообщений на моменты времени ts - θ и ts соответственно; θ - интервал времени между предыдущим и последующим моментами, с которыми соотносят указанные оценки;  ,
,  - экстраполированные координаты;
- экстраполированные координаты;  ,
,  - сглаженные координаты на соответствующие моменты времени, α, β - коэффициенты сглаживания, причем 0<α≤1, 0<β≤1 и зависят от количества сообщений.
- сглаженные координаты на соответствующие моменты времени, α, β - коэффициенты сглаживания, причем 0<α≤1, 0<β≤1 и зависят от количества сообщений.
Другие составляющие скорости Vys и Vzs рассчитываются аналогично.
Рассчитанные координаты скорости используют для вычисления и последующего отображения на индикаторе вектора истинной путевой и вертикальной скорости.
При наличии нескольких источников ложной информации аналогичная процедура выполняется для каждого из них.
В общем виде бортовое устройство, реализующее заявленный способ индикации, структурная схема которого показана на фиг.5, должно включать в себя цифровой радиоприемопередатчик (радиомодем) 5.1, навигационную систему 5.2, в качестве которой используется GNSS - приемник, индикатор 5.3. и котроллер 5.2, связывающий эти устройства. Контроллер включает в себя один или более процессоров обработки данных и оперативную память.
В оборудовании наземной базовой радиостанции вместо навигационной системы включена GPS - радиостанция дифференциальных поправок.
Величина временной задержки в виде двоичного кода поступает в процессор, куда вводятся также и информация, содержащаяся в принятом сообщении. Блок-схема алгоритма обработки недостоверных данных о координатах показана на фиг.6.
Заранее задают порог обнаружения недостоверности Δp и максимальное время Тm ожидания поступления сообщений от других радиостанций, которые обнаружили недостоверность координатных данных s-ой радиостанции.
Ввод данных 6.1 о собственных координатах и параметрах движения от приемника спутниковой навигационной системы или от навигационной системы иного типа производится с периодом, не превышающим длительности одного слота.
Сообщения от других радиостанций 6.2, полученные по линии передачи данных VDL, вводятся после декодирования и записываются в оперативную память.
По содержащимся в принятом сообщении координатам и собственным координатам рассчитывают расстояние до s-ой радиостанции, передавшей указанное сообщение, а по величине временной задержки - соответствующую псевдодальность 6.3 и проверяют выполнение неравенства (1) 6.4.
Если условие (1) выполняется, то соответствующие координатные данные признают недостоверными, а s-ой радиостанции присваивают признак недостоверности и результат записывают в память. Затем формируют, передают в общий канал и записывают в память сообщения о недостоверности координатных данных, переданных s-ой радиостанцией 6.5, содержащее псевдодальность, собственные координаты на момент вычисления указанной псевдодальности, а также параметр давности.
Периодически просматривая данные сообщений, записанные в памяти 6.6, отбирают те из них, которые относятся к одной и той же s-ой недостоверной радиостанции, недостоверность координатных данных которой обнаружена в один и той же момент времени. К системе уравнений (2) для псевдодальности, составленной из указанных сообщений, новое n+1-ое уравнение не добавляется, если одновременно выполнены два условия: n≥m и получено новое сообщение от s-ой радиостанции. Затем проверяются условия достаточности количества указанных радиостанций и их расположения 6.7. Если условие выполнено, то решают систему уравнений (2) и вычисляют оценки истинных координат источника ложного сообщения и радиус сдвига 6.8.
Если время, прошедшее с момента ts превышает максимальное время ожидания Тm 6.9, то информация относительно данных о передаче сообщений s-ой радиостанции в момент времени ts стирается.
Если s-ая радиостанция повторно посылает недостоверное сообщение 6.10 и вычислены оценки ее истинных координат, то с помощью цифровых фильтров рассчитывают составляющие скорости, а также экстраполированные и сглаженные координаты s-ой радиостанции в соответствии с формулами (3)-(5) 6.11.
Вывод информации 6.12 о положении в пространстве объектов наблюдения осуществляется с помощью видеомониторов, на экранах которых формируют двухмерные, а также трехмерные изображения.
В соответствии с блок-схемой алгоритма, показанной на фиг.6 на экране индикатора внутрикабинного монитора, а также на экране дисплея наземной радиостанции, отображают картину обстановки в области пространства, в которой располагаются объекты наблюдения. В качестве указанных индикаторов может быть использовано стандартное навигационное оборудование и диспетчерские видеомониторы, входящие в состав систем автоматизированного управления воздушным движением или иные специализированные средства отображения информации. Объекты наблюдения отображают в виде отметок-символов, снабжают дополнительно цифровыми данными о высоте, их идентификаторами, а также векторами, изображающими величину путевой скорости и угол пути. В отличие от отметок радиостанций, передающих достоверную координатную информацию, отметки, соответствующие недостоверным координатам, а также ложные отметки отображают символами недостоверной и ложной отметок соответственно, причем указанную ложную отметку соединяют линией-связкой с точкой на экране, положение которой соответствует вычисленным истинным координатам s-ой радиостанции, причем указанная точка является центром окружности, размер которой соответствует модулю радиуса сдвига, вычисленным по формуле (2) и показанным на фиг.4.
В силу особенностей реальных аппаратных и программных средств в передатчик могут поступать устаревшие данные о координатах. Такая задержка может составлять доли секунды или доходить до нескольких секунд и вызывать, как следствие, искажение действительной картины обстановки. Так, например, при движении объекта со скоростью 300 м/с, что соответствует 1080 км/ч, задержка в одну секунду приведет к ошибке 300 м.
С целью учета указанного фактора для отображения истинного положения s-ой радиостанции, которая передает ложную координатную информацию, по вычисленным составляющим скорости рассчитывают координаты, экстраполированные на время, соответствующее величине параметра давности θn.
При наличии транспондера в центре УВД, осуществляющем радиолокационный контроль за воздушным движением, на экране бортового индикатора могут отображаться по этим данным отметки ВС, не оборудованных транспондерами. При наличии сети наземных радиостанций область пространства, отображаемая на экране, может быть расширена.
В центре УВД, оборудованном транспондером, на экране монитора отображают положение ВС, а также и наземных транспортных средств, на которых установлены транспондеры.
Таким образом экипаж ВС и других оборудованных подвижных объектов, а также наземные службы наблюдения и управления движением обеспечиваются достоверной информацией об обстановке в окружающем пространстве за счет выявления недостоверных данных и ложных целей, причем вычисляют и индицируют истинное положение и параметры движения радиостанций, передающих заведомо ложные координаты.
Тем самым при использовании заявленного способа индикации положения подвижных объектов путем повышения информативности и достоверности представляемой информации вырастает уровень безопасности движения, и, следовательно, оказывается возможным реализация заявленного технического результата.
ПРИЛОЖЕНИЕ 1
ХАРАКТЕРИСТИКИ ПРИЕМОПЕРЕДАЮЩЕГО ОБОРУДОВАНИЯ
Приемопередающее оборудование линии цифровой связи VDL режима 4 разработано фирмой "НИТА" и отвечает требованиям ИКАО «АВИАЦИОННАЯ ЭЛЕКТРОСВЯЗЬ», ПРИЛОЖЕНИЕ 10 к Конвенции о международной гражданской авиации, том 3, часть 1, Раздел 4 главы 6.
1. Циклограмма передачи частотного канала.
Передача осуществляется в одном или нескольких последовательных временных окнах - слотах. Длительность одного слота определяется в результате деления временного интервала 60 с Всемирного Координированного Времени UTC на 4500 равных интервалов - слотов.
Процесс передачи состоит из 6 этапов и поясняется таблицей 1 и фиг.7.
(A) - стабилизация мощности передачи;
(B) - синхронизация и разрешение неоднозначности;
(C) - передача данных;
(D) - выключение/затухание мощности передатчика;
(Е) - защитный интервал на распространение;
Стадии (А) и (В) составляют настроечный сигнал.
Циклограмма передачи однослотового сообщения
2. Стадии передачи.
2.1. Стабилизация мощности передатчика. Первым сегментом настроечной последовательности является стабилизация мощности передатчика продолжительностью 16 символьных периодов. Необходимо, чтобы в конце выполнения сегмента стабилизации мощности передатчика уровень его мощности составлял не менее 90% стабильного уровня.
2.2. Синхронизация битов. Второй сегмент настроечной последовательности представляет собой 24-битовую последовательность 0101 0101 0101 0101 0101 0101, передаваемую слева направо непосредственно перед началом сегмента данных.
2.3. Разрешение неоднозначности и передача данных. Передача первого бита данных начинается с 40-битовыми интервалами (приблизительно 2083,3 мкс, +/-1 мкс после номинального начала передачи).
2.4. Снижение мощности передатчика. Уровень передаваемой мощности снижается по крайней мере на 20 дБ в течение 300 мкс после завершения передачи. Уровень мощности передатчика составляет менее -90 дБ в течение 832 мкс после завершения передачи.
3. Метод модуляции.
Метод модуляции представляет собой частотную манипуляцию с гауссовой фильтрацией (GFSK). Первый передаваемый бит (в настроечной последовательности) представляет собой высокий тон и передаваемый тон изменяется перед передачей 0 (т.е. кодирование без возвращения к нулю с инвертированием). В системе VDL режима 4 к передаваемым данным применяется процедура бит-стаффинга (добавление 1 к каждой пачке из 5-ти последовательных единиц).
4. Частота модуляции.
Двоичные "единицы" и двоичные "нули" генерируются с индексом модуляции в 0,25±0,03 и произведением ВТ=0,28±0,03, что обеспечивает передачу данных с битовой частотой в 19200 бит/с ±50 ppm.
5. Требования к приемнику.
В соответствии с п.п.6.9.5.1.5.2 Приложения 10 приемник должен быть способен измерять время поступления каждой принимаемой передачи с ошибкой 2σ не более 5 мкс. Здесь и далее σ обозначает соответствующее среднее квадратическое отклонение (с.к.о.).
6. Формат пакета.
На фиг.7 представлена временная диаграмма передаваемого пакета. Стадия С передачи данных начинается и заканчивается флагом 01111110. К флагу процедура бит-стаффинга не применяется. Это позволяет выделять флаги из общего потока принимаемых бит, определяя границы пакетов.
7. Процедура приема пакетов приемником (ПРМ).
Приемник во время своей работы с помощью детектора мощности определяет средний уровень шума в канале при отсутствии передаваемых сообщений и выставляет порог, при превышении которого уровнем шума считается, что на входе ПРМ появился передаваемый сигнал. ПРМ переходит в состояние поиска старт-флага. Если он найден, то ПРМ начинает декодировать принятые данные и передавать их на вышестоящий уровень для дальнейшей обработки, одновременно производя поиск стоп-флага. По нахождению стоп-флага прием прекращается, и ПРМ возвращается в состояние ожидания появления сигнала на своем входе. В случае ошибки при приеме или снижения входной мощности ниже порогового уровня прием также прекращается.
8. Вычисление псевдодальности.
Момент приема флага фиксируется приемником с точностью не хуже 5 мкс (см. п.5) и сообщается на вышестоящий уровень. Зная момент начала передачи данных относительно начала слота (см. п.2.3), скорость передачи данных (см. п.4) и момент приема флага, можно вычислить задержку на распространение сигнала от передатчика к приемнику с суммарной погрешностью 2σ не хуже 6 мкс.
С учетом погрешности синхронизации бортовых часов и погрешности измерения и кодирования координат, а также для снижения риска псевдоложных тревог примем для порога Δp принятия решения о недостоверности величину погрешности 3σ=8 мкс и Δp=2500 м. При вычислении псевдодальности Р величину времени задержки, полученной на выходе ПРМ, следует уменьшить на величину систематической составляющей τc=2083,3 мкс + 416,7 мкс = 2500 мкс.
ПРИЛОЖЕНИЕ 2
ОПРЕДЕЛЕНИЕ КООРДИНАТ ИСТОЧНИКА ЛОЖНОЙ ИНФОРМАЦИИ
Для того чтобы отыскать оценку координат станции, от которой получено недостоверное сообщение, следует решить систему уравнений (2).
Однако в общем случае записать это решение в виде алгебраических функций невозможно, так как указанная система нелинейная. Временные задержки содержат не только регулярные, но также и случайные составляющие и при избыточном количестве n>m уравнений они несовместимы. По этой причине следует применять численные процедуры, например, основанные на методе наименьших квадратов.
Процедура последовательных приближений заключается в улучшении на каждом ее шаге оценки искомых координат, хs, ys и zs, а также неизвестного параметра радиуса временного сдвига Rs.
На первом шаге в качестве первого приближения принимают, например, переданные s-той станцией координаты:  ,
,  ,
,  .
.
Полагая предыдущее приближение  ,
,  ,
,  известными, представим для следующего, k+1-ого шага (k=1, 2, 3, ...)
известными, представим для следующего, k+1-ого шага (k=1, 2, 3, ...)
 ,
,  ,
,  ,
,
где dx(k), dy(k) и dz(k) - неизвестные величины. Запишем систему (2) с учетом указанных обозначений.

Полагая dx(k), dy(k), dz(k) малыми, линеаризуем записанную нелинейную систему, разложив корень квадратный в ряд Тейлора и отбросив члены выше первой степени, система примет следующий вид:

В соответствии с методом наименьших квадратов решение указанной системы, представленное в векторно-матричной форме, имеет следующий вид:
 ,
,
где А - матрица размерности n×m имеет следующий вид:

а верхние индексы "Т" и "-1" обозначают транспонирование и обращение матрицы соответственно.
Процесс последовательного приближения останавливается, когда на очередной итерации выполняется неравенство:

где ε - наперед заданное малое число.
Временной сдвиг τs вычисляют по формуле:
τs=Rs/C,
где С - скорость света.
В сообщении может содержаться информация о давности данных, а именно двоичный код величины интервала времени между измерением собственных координат и моментом начала передачи сообщения. На принимающей станции декодирование производится в соответствии с таблицей 2 «Кодирование подполя "Давность данных"»
При наличии величины θs для отображения местоположения s-той станции используют экстраполированные координаты.
Для вычисления экстраполированных координат можно использовать также и цифровые фильтры (см., например, Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учебное пособие / P.M.Ахмедов, А.А.Бибутов, А.В.Васильев и др. Под ред. С.Г.Пятко и А.И.Красова. СПб.: Политехника, 2004. - с.155-159).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ (ВАРИАНТЫ) | 2024 |
|
RU2830184C1 |
| Способ и устройство контроля достоверности информации наблюдения | 2022 |
|
RU2801584C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2584541C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2292056C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |




Изобретение относится к области авиационной техники, а именно к системам навигации, самолетовождения, управления воздушным движением и наблюдения за подвижными объектами в воздушном пространстве, на земной и водной поверхности. На каждом из наблюдаемых подвижных или стационарных объектов, оборудованных измерителями координат местоположения и параметров движения, устанавливают приемопередающие радиостанции, которые ведут передачу в один или несколько общих каналов в заранее отведенный для этого отрезок времени, начало которого точно фиксировано на шкале единого времени. Передаваемое сообщение определенного вида содержит идентификатор источника сообщения, данные о координатах местоположения станции, параметрах движения, а также дополнительную информацию. На каждой подвижной приемопередающей радиостанции, а также и на базовой радиостанции вычисляют разности между собственными координатами и координатами передающей радиостанции на момент получения сообщения и расстояние до соответствующей подвижной передающей радиостанции, а по величине задержки принятого кодированного сообщения вычисляют соответствующую псевдодальность, разность между псевдодальностью и указанным расстоянием. При превышении абсолютной величины модуля этой разности допустимого значения принимают решение о недостоверности переданных координат, соответствующей радиостанции присваивают признак недостоверности, а на экране собственного индикатора соответствующую отметку отображают особым символом. Изобретение позволяет повысить информативность и достоверность индицируемых данных. 4 з.п. ф-лы, 7 ил., 2 табл.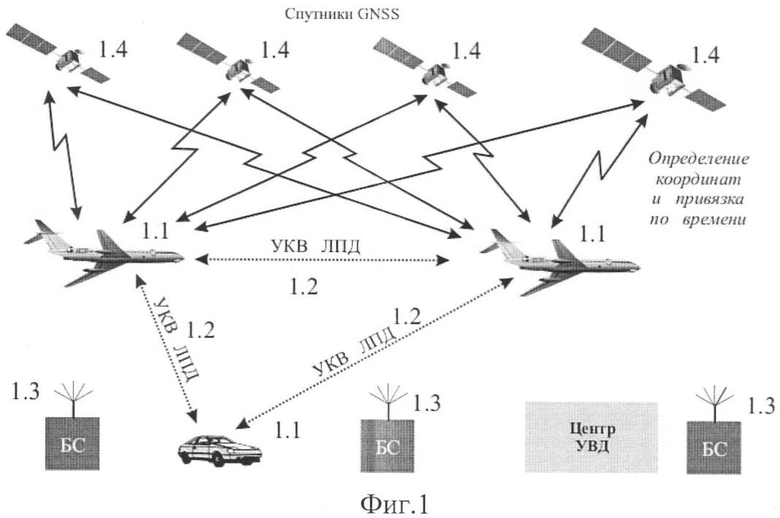
| СИСТЕМА ИНДИКАЦИИ ПОЛОЖЕНИЯ | 1992 |
|
RU2108627C1 |
| US 5570095 A, 29.10.1996 | |||
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| Предохранительное приспособление при фуговочном строгальном станке | 1929 |
|
SU16868A1 |

