Изобретение относится к области охранной сигнализации, в частности к средствам тревожной сигнализации, предназначенным для обнаружения объекта нарушения, проникающего через зону обнаружения рубежа охраны и вызвавшего срабатывания средства тревожной сигнализации по факту преодоления объектом нарушения зоны обнаружения во время пересечения объектом нарушения этого рубежа охраны.
Общеизвестны пассивные инфракрасные средства обнаружения, которые используются в качестве средств тревожной сигнализации и обнаруживают изменения в инфракрасной зоне излучения (диапазон длин волн 8-14 мкм) за счет разницы температур между нарушителем (человеком) и окружающей его средой. Для того, чтобы контролировать большую область пространства пассивные инфракрасные средства обнаружения снабжаются оптической системой, состоящей из линз и зеркал, с фокусированием отдельных секторов пространства на соответствующие детекторы инфракрасного излучения. В качестве детекторов инфракрасного излучения обычно используются пироэлектрические элементы, работающие на принципе пьезоэлектрического эффекта. Технические решения для реализации пассивных инфракрасных средств обнаружения являются общеизвестными. Принципы действия и алгоритмы функционирования подробно описаны в технической литературе, например, в книге «Системы защиты периметра» авторов Г.Ф. Шанаева и А.В. Леуса, издательство «Секьюрити Фокус», Москва, 2011 г., в подразделе 2.13. «Пассивные инфракрасные (ПИК) средства обнаружения», с. 114-126, www.iss.ru.
Обычно средства тревожной сигнализации пассивного инфракрасного принципа действия формируют двухзональные поля наблюдения, например, с коридорной формой зоны обнаружения. К таким устройствам, например, можно отнести изделия ИД-40, ИД-50, ИД-70 производства НПФ «Полисервис», г. С.-Петербург (см. каталог продукции «GSN Electronic Company Ltd.», 2014 г., www.gsncompany.com), а также двухканальное инфракрасное средство обнаружения - MedaRed (LRP-180QH) фирмы «Optex» (Япония) с дальностью действия до 180 м.
Самое слабое место у приведенных выше пассивных инфракрасных средств обнаружения - их неустойчивая работа и наличие ложных срабатываний из-за постоянных изменений температур и солнечных «засветок», особенно проявляющихся при воздействии в дальней граничной области зоны чувствительности. В этих изделиях отсутствует возможность ограничения дальности действия и связанная с этим необходимая помехоустойчивость. В изделиях также отсутствует возможность получения информации о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направления его движения через охраняемый рубеж.
Известно устройство для обнаружения перемещения источника тепла «Apparatus for detecting movement of heat source», описанное в патенте US №5296707, МПК G01J 5/08, опубл. 1994 г., содержащее сигнальный процессор и двухканальную сенсорную секцию, у которой в каждом канале размещены линза Френеля, инфракрасный датчик и усилитель. Сенсорная секция предназначена для приема ИК-лучей из двух боковых отдельных секторов зоны обнаружения, а также из сформированного сектора центральной зоны перекрытия. Таким образом, вся зона наблюдения разделяется на три сектора зоны обнаружения, изменения температуры в которых могут быть обнаружены двумя сенсорными системами. Сигналы с каждого канала сенсорной секции поступают на входы сигнального процессора, в котором осуществляется их обработка по обнаружению движения нарушителя между секторами зоны обнаружения. Нарушитель обнаруживается сначала в одном крайнем секторе зоны обнаружения, потом в центральном секторе зоны перекрытия и затем в другом крайнем секторе зоны обнаружения.
Сходными существенными признаками являются: сигнальный процессор, сенсорные секции с линзами Френеля, инфракрасными датчиками и усилителями, а также наличие двух боковых секторов зоны обнаружения.
Недостатком устройства является отсутствие возможности ограничения дальности действия и получения информации о расстоянии до места нарушения, поперечном размере объекта нарушения и скорости его движения через охраняемый рубеж.
Известен пассивный инфракрасный датчик движения (варианты), описанный в патенте RU №2353006, МПК G11B 11/00, опубл. 2009 г., содержащий оптическую систему, систему пассивного инфракрасного (ПИК) детектора, контур (блок) обработки сигнала, систему обработки (процессор) и формирователь звуковой или визуальной тревоги. Система ПИК детектора включает в свой состав два детектора, состоящих из элементов различной конфигурации. Первый детектор контролирует первый сектор обзора пространства, второй детектор контролирует второй сектор обзора пространства, оптическая система при этом перекрывает первый и второй сектора обзора пространства, которые пересекаются между собой. Сигналы с детекторов объединяются для определения движения объекта и его размера, а полярность сигналов может быть использована для определения направления движения объекта. Система обработки по наличию или отсутствию двух различных частот распознает отличия между движущими объектами и не движущими источниками помех. Система обработки также использует эти сигналы в качестве информации о размере движущейся цели.
Сходными существенными признаками являются: оптическая система для обзора пересекающихся между собой первого и второго сектора пространства, первый и второй детекторы, система обработки (процессор), формирователь звуковой или визуальной тревоги.
Недостатком датчика является отсутствие возможности ограничения дальности действия и получения информации о скорости движения объекта нарушения через охраняемый рубеж.
Все упомянутые недостатки частично устраняются в другом, наиболее близким по технической сущности к заявленному изобретению, известному пассивному инфракрасному прибору для обнаружения граничных переходов «Passive infrared device for detection of boundary crossings)), описанному в патенте US №6881957, МПК G01J 5/00, опубл. 2005 г.
Прибор содержит: инфракрасный датчик (PIR) с первым и вторым пироэлектрическими элементами, оптическую систему, усилитель, совмещенный с полосовым фильтром, компаратор, процессор, источник опорного напряжения, детектор разряда батареи и ВЧ-передатчик (радиомодем). Инфракрасный датчик оснащен оптической системой, которая формирует два смещенных в пространстве друг относительно друга сектора зоны обнаружения. В качестве оптической системы используется линза Френеля. Первый и второй пироэлектрические элементы формируют сигналы с двумя перепадами напряжения противоположенной полярности, причем первый пироэлектрический элемент расположен в фокусе первого сектора зоны обнаружения и формирует положительный сигнал при обнаружении изменения ИК-излучения в этом секторе, а второй пироэлектрический элемент расположен в фокусе второго сектора зоны обнаружения и формирует отрицательный сигнал при обнаружении изменения ИК-излучения в соответствующим секторе. Положительный и отрицательный сигналы объединяются для обеспечения выходного сигнала инфракрасного датчика. Последовательно соединенные инфракрасный датчик, полосовой фильтр, усилитель и компаратор образуют канал аналоговой обработки сигнала. Компаратор имеет два выхода превышения и понижения пороговых значений (положительного и отрицательного), которые подключены к входам процессора. Алгоритм функционирования процессора выполнен с возможностью определения момента пересечения исходным сигналом нулевого уровня на основе анализа соотношений временных параметров импульсов с выходов компаратора, что является признаком пересечения граничной или осевой линии зоны обнаружения. При необходимости признак пересечения границы (осевой линии) может быть передан с помощью ВЧ-передатчика (радиомодема) на центральный (внешний) контроллер или другое устройство по радиоканалу связи. В данном приборе чувствительность в секторах зоны обнаружения в дальней области не ограничена, что снижает помехоустойчивость прибора к воздействию посторонних объектов, движущих на дальних расстояниях от оптической системы прибора.
Общими существенными признаками с заявляемым решением являются: оптическая система, формирующая первый и второй секторы зоны обнаружения, смещенные в пространстве друг относительно друга, инфракрасный датчик (PIR) с первым и вторым пироэлектрическими элементами, полосовой фильтр и усилитель, компаратор, процессор, а также возможность передачи полученной информации с помощью ВЧ-передатчика (радиомодема) на центральный (внешний) контроллер или другое устройство.
Недостатком прибора является отсутствие возможности ограничения дальности действия и получения информации о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направления его движения через охраняемый рубеж.
Целью настоящего изобретения является обеспечение возможности ограничения дальности действия и получение информации о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направления его движения через охраняемый рубеж. Возможность ограничения дальности действия позволяет повысить помехоустойчивость средства обнаружения путем ограничения дальней зоны чувствительности на необходимом расстоянии от оптической системы, что исключает наличие ложных срабатываний из-за изменений температур и солнечных «засветок» за границей зоны чувствительности, а также влияние помеховых факторов в виде движущихся посторонних объектов. Информация о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направлении его движения через охраняемый рубеж дает возможность идентифицировать объект нарушения по классам (человек, мелкое животное или птица, транспортное средство), что дает дополнительную информацию службе охраны для задержания нарушителя.
Эта цель достигнута в предложенном интеллектуальном пассивном инфракрасном средстве обнаружения (ПИКСО), содержащем оптическую систему, формирующую первый и второй секторы зоны обнаружения, смещенные в пространстве друг относительно друга, инфракрасный датчик с первым и вторым пироэлектрическими элементами, причем первый и второй секторы зоны обнаружения сфокусированы с помощью оптической системы соответственно на оптические входы первого и второго пироэлектрических элементов, первый аналоговый канал, в состав которого входят первый компаратор и последовательно соединенные первый полосовой фильтр и первый усилитель, выход первого пироэлектрического элемента соединен со входом первого полосового фильтра, выход первого компаратора подключен к первому входу процессора, выполненного с возможностью формирования сигнала тревоги и передачи его на внешний пункт сбора и отображения информации посредством подключенного к процессору радиомодема, связанного по радиоканалу с внешним пунктом сбора и отображения информации, в интеллектуальное ПИКСО дополнительно введены: второй аналоговый канал, элемент И, элемент ИЛИ, в первый аналоговый канал введен первый выпрямитель, во второй аналоговый канал введены последовательно соединенные второй полосовой фильтр, второй усилитель, второй выпрямитель и второй компаратор, выход первого усилителя в первом аналоговом канале подключен ко входу первого выпрямителя, выход которого подключен ко входу первого компаратора, выход второго пироэлектрического элемента соединен со входом второго полосового фильтра, выход второго компаратора подключен ко второму входу процессора, первый и второй входы элемента И подключены соответственно к выходам первого и второго компараторов, а его выход подключен к третьему входу процессора, первый и второй входы элемента ИЛИ подключены соответственно к выходам первого и второго компараторов, а его выход подключен к четвертому входу процессора, который выполнен с дополнительной возможностью анализа сигналов первого и второго аналоговых каналов с целью ограничения дальности действия интеллектуального ПИКСО путем задания границы дальности, определения расстояния до места нарушения, поперечного размера объекта нарушения, а также скорости и направления его движения через охраняемый рубеж. Оптическая система выполнена с возможностью использования оптических линз, линз Френеля, зеркальной оптики или с возможностью их комбинирования. Интеллектуальное ПИКСО выполнено с возможностью передачи информации о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направления его движения через охраняемый рубеж на внешний пункт сбора и отображения информации посредством радиоканала связи. Интеллектуальное ПИКСО также выполнено с возможностью изменения границы дальности по команде, получаемой по радиоканалу связи от внешнего пункта сбора и отображения информации в зависимости от тактических соображений.
Сущность изобретения поясняется фиг. 1-4, на которых изображено следующее.
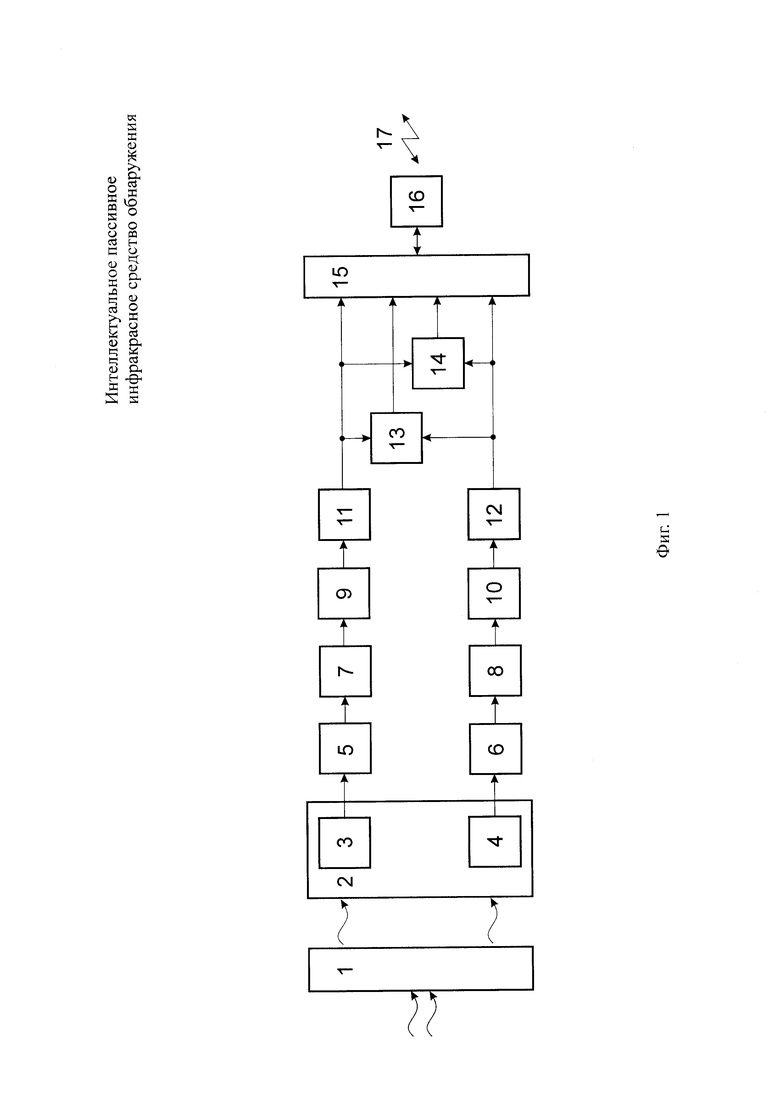
На фиг. 1 приведена структурная схема интеллектуального ПИКСО, где введены обозначения: оптическая система - 1, инфракрасный датчик - 2, первый - 3 и второй - 4 пироэлектрические элементы, первый - 5 и второй - 6 полосовые фильтры, первый - 7 и второй - 8 усилители, первый - 9 и второй - 10 выпрямители, первый - 11 и второй - 12 компараторы, элемент И - 13, элемент ИЛИ - 14, процессор - 15, радиомодем - 16, радиоканал связи - 17.
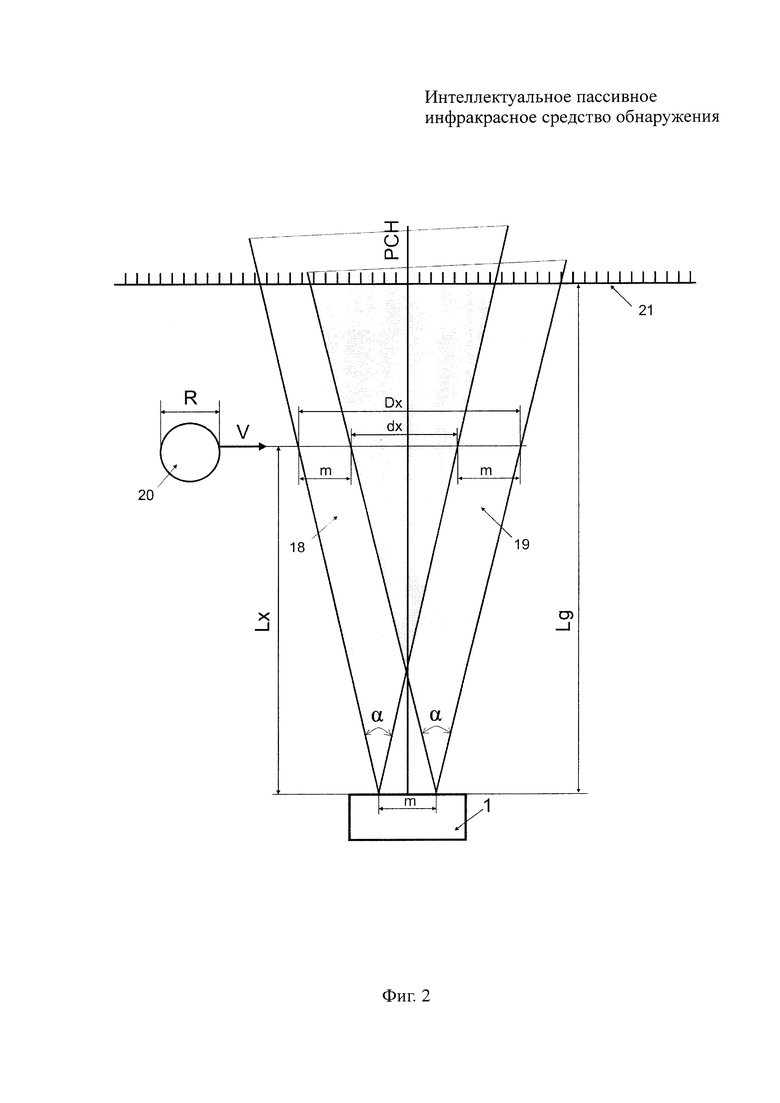
На фиг. 2 приведен пример расположения в пространстве первого - 18 и второго - 19 секторов зоны обнаружения. На фиг. 2 также введены обозначения объекта нарушения - 20 и заданной границы дальности - 21.
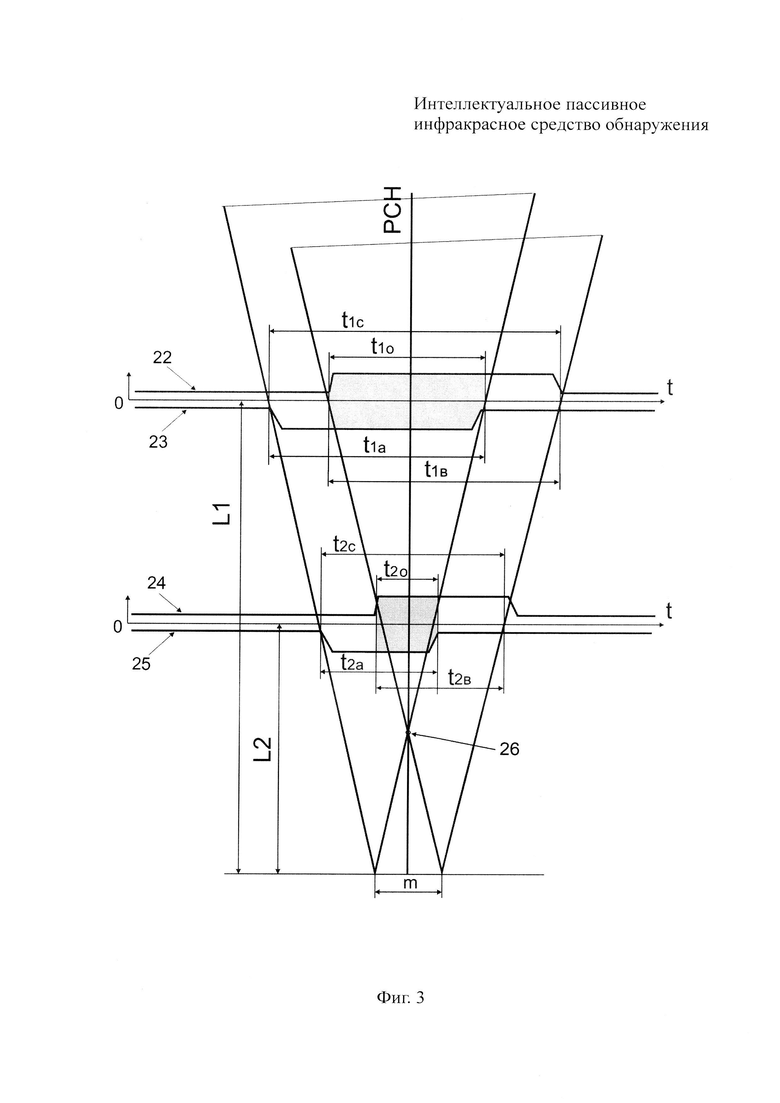
На фиг. 3 приведены для примера временные диаграммы (эпюры) сигналов на выходах первого 7 и второго 8 усилителей при пересечении объектом нарушения 20 зоны обнаружения охраняемого рубежа. Для пояснения принципа сигналообразования временные диаграммы (эпюры) сигналов наложены на соответствующие первый и второй секторы зоны обнаружения. На фиг. 3 введены обозначения: сигнал - 22 на выходе первого усилителя, и сигнал - 23 на выходе второго усилителя в дальней зоне обнаружения, сигнал - 24 на выходе первого усилителя, и сигнал - 25 на выходе второго усилителя в ближней зоне обнаружения. На фиг. 3 также обозначена точка - 26 окончания «мертвой» зоны вблизи оптической системы.
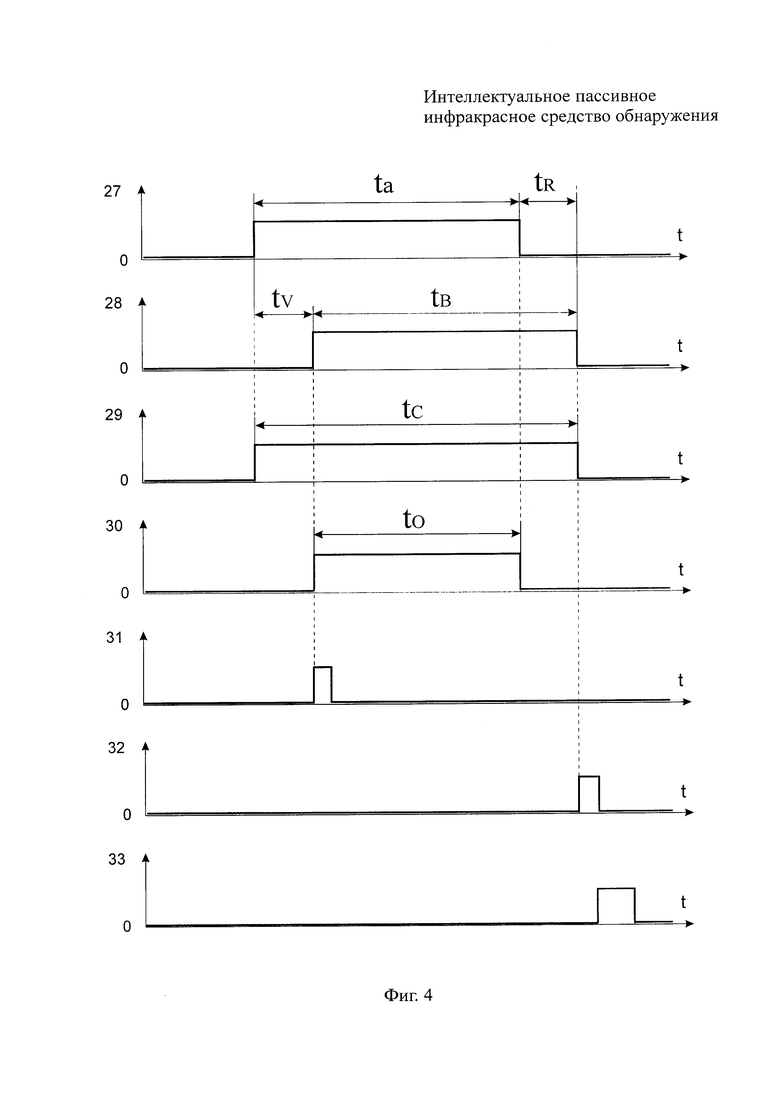
На фиг. 4 приведен пример временных диаграмм основных исходных сигналов, необходимых для работы процессора. На фиг. 4 введены обозначения: сигнал - 27 на выходе первого компаратора, сигнал - 28 на выходе второго компаратора, сигнал - 29 на выходе элемента ИЛИ, сигнал - 30 на выходе элемента И. На фиг. 4 приведены также сигналы, соответствующие интервалам времени формирования в процессоре величины скорости V движения объекта нарушения через охраняемый рубеж (эпюра 31), величины Lx расстояния до места нарушения, величины поперечного размера R объекта нарушения (эпюра 32) и признака направления движения объекта нарушения «к нам» или «от нас» (эпюра 33). Во время действия сигнала, приведенного на эпюре 33, происходит также завершение обработки исходных сигналов в процессоре с учетом ограничения дальности действия. В конце этого интервала времени происходит передача всей тревожной информации на внешний пункт сбора и отображения информации.
Предложенное интеллектуальное ПИКСО работает следующим образом.
Оптическая система 1 (см. фиг. 2) формирует два расходящихся сектора зоны обнаружения, смещенных в пространстве друг относительно друга на известное расстояние m: первый сектор зоны обнаружения 18 и второй сектор зоны обнаружения 19. Каждый из этих расходящихся секторов зоны обнаружения имеет угол обзора α и сфокусирован с помощью оптической системы 1 на оптический вход одного из двух пироэлектрических элементов инфракрасного датчика 2: первый сектор зоны обнаружения 18 сфокусирован на оптический вход первого пироэлектрического элемента 3, второй сектор зоны обнаружения 19 сфокусирован на оптический вход второго пироэлектрического элемента 4. Осевая линия зоны обнаружения является линией равносигнального направления (РСН) и совпадает с центральной (осевой) линией рубежа охраны и обозначена на фиг. 2 отдельной линией. Объект нарушения 20 при преодолении рубежа охраны последовательно пересекает зону обнаружения интеллектуального ПИКСО, состоящую из секторов 18 и 19, например, слева направо (как показано на фиг. 2). При этом в пироэлектрических элементах 3 и 4 последовательно формируются сигналы пересечения объектом нарушения 20 соответствующих секторов зоны обнаружения. Каждый из выходов пироэлектрических элементов 3 и 4 подключен соответственно к первому и второму аналоговым каналам. В свою очередь, каждый из аналоговых каналов содержит четыре последовательно соединенных элемента: полосовой фильтр, усилитель, выпрямитель и компаратор. Причем, первый аналоговый канал содержит первый полосовой фильтр 5, первый усилитель 7, первый выпрямитель 9 и первый компаратор 11. Второй аналоговый канал содержит второй полосовой фильтр 6, второй усилитель 8, второй выпрямитель 10 и второй компаратор 12. Оба аналоговых канала выполнены по аналогичным схемотехническим решениям. Первый 5 и второй 6 полосовые фильтры предназначены для ограничения полосы пропускания полезного инфракрасного сигнала с целью обеспечения помехоустойчивости к нежелательным шумам. Первый 7 и второй 8 усилители предназначены для усиления полезного сигнала. В зависимости от разницы температур фона tоф окружающего пространства и тела tон объекта нарушения полярность сигналов может быть различной, и в этом случае возникает необходимость использования выпрямителей 9 и 10. Первый 9 и второй 10 выпрямители предназначены для формирования сигналов в первом и втором аналоговых каналах одинаковой (положительной) полярности. Первый 11 и второй 12 компараторы предназначены для формирования сигналов логического уровня нормированной амплитуды (0 и 1) для возможности дальнейшей их обработки элементом И (элементом конъюнкции) и элементом ИЛИ (элементом дизъюнкции).
При преодолении объектом нарушения 20 с постоянной скоростью V последовательно секторов 18 и 19 зоны обнаружения на расстоянии Lx (как показано на фиг. 2) в соответствующих первом и втором аналоговых каналах будут сформированы сигналы, сдвинутые по времени друг относительно друга (см. фиг. 3). Эти сигналы по амплитуде пропорциональны разности температур тела tон объекта нарушения и фона tоф, а по длительности - соответствуют временам воздействия объекта нарушения на каждый из секторов зоны обнаружения. На фиг. 3 представлены примеры сигналов на выходах первого и второго усилителей в дальней (на расстоянии L1) и ближней (на расстоянии L2) зонах рубежа охраны. В дальней зоне сигналы на выходах первого и второго усилителей (эпюры 22 и 23) будут иметь длительности t1в и t1a. В ближней зоне эти сигналы на выходах первого и второго усилителей (эпюры 24 и 25) будут иметь соответственно длительности t2в и t2a. Сигналы с выходов первого 7 и второго 8 усилителей поступают раздельно на входы первого 9 и второго 10 выпрямителей и преобразуются в сигналы одинаковой (положительной) полярности. Далее эти сигналы поступают на соответствующие входы первого 11 и второго 12 компараторов, на выходах которых формируются сигналы логического уровня, возникающие в результате сравнения входных сигналов с заданными пороговыми уровнями. Пример таких сигналов длительностью t1a и t1в приведен на фиг. 4 (соответственно, эпюры 27 и 28). Сигналы с выходов компараторов 11 и 12 поступают на соответствующие первый и второй входы процессора 15 для дальнейшей процедуры обнаружения объекта нарушения охраняемого рубежа. Одновременно эти сигналы поступают также на входы элемента И 13 и элемента ИЛИ 14 для получения дополнительных временных соотношений, необходимых для анализа ситуации в зоне обнаружения. На выходах элемента И 13 и элемента ИЛИ 14 формируются импульсы, по длительности соответствующие сигналам на выходах усилителей 7 и 8 (см. фиг. 3) - длительностью t1o и t1c (в дальней зоне), или длительностью t2o и t2c (в ближней зоне). Времена to (t1o или t2o) одновременного воздействия объекта нарушения на оба сектора зоны обнаружения на фиг. 3 затонированы. Времена tc (t1c или t2c) суммарного воздействия объекта нарушения на оба сектора зоны обнаружения определяются максимальной суммарной длительностью двух сигналов. Пример логических сигналов с выходов элемента И 13 и элемента ИЛИ 14 приведен на фиг. 4 (эпюра 30 - сигнал на выходе элемента И длительностью t1o, эпюра 29 - сигнал на выходе элемента ИЛИ длительностью t1c). В четырех исходных сигналах (фиг. 4 - эпюры 27, 28, 29 и 30), поступающих на входы процессора 15, заложена информация для определения расстояния до места нарушения и параметров объекта нарушения - поперечного размера, а также скорости и направления его движения через охраняемый рубеж.
Исходя из геометрии секторов зоны чувствительности, нетрудно убедиться, что при пересечении объектом нарушения зоны чувствительности для каждого конкретного расстояния L от оптической системы 1, величина F отношения времени to одновременного воздействия к времени tc суммарного воздействия не зависит от скорости V движения объекта нарушения и может быть выбрана в качестве косвенной оценки этого расстояния.
Нетрудно показать, выразив времена to и tc через соответствующие расстояния (dx и Dx) и скорость движения объекта нарушения V, что величина F определяется геометрическими размерами dx и Dx в месте пересечения зоны чувствительности объектом нарушения (см. фиг. 2, 3):

где: R - поперечный размер объекта нарушения;
V - скорость движения объекта нарушения;
m - величина сдвига секторов зоны обнаружения друг относительно друга.
Таким образом, определенное значение величины F соответствует определенному расстоянию L и является косвенной оценкой места пересечения объекта нарушения охраняемого рубежа. Величина F является дробным числом, вблизи оптической системы близка к 0, а по мере увеличения расстояния L - стремится к 1 (то есть изменяется в зависимости от расстояния L в пределах от 0 до 1). Величину F можно использовать для ограничения дальности действия интеллектуального ПИКСО. Если по техническим характеристикам максимально возможная дальность действия интеллектуального ПИКСО равна L max (например, 100 м), то в соответствии с величиной F этому расстоянию можно сопоставить значение величины F, равное 1. Тогда можно условно создать границу дальности Lg (например, 85 м в соответствии с величиной F, равной 0,85), за пределами которой можно будет отсечь все сигналы и помехи. Возможность ограничения дальности действия позволяет повысить помехоустойчивость интеллектуального ПИКСО путем исключения наличия ложных срабатываний из-за изменений температур и солнечных «засветок» за границей дальности, а также влияние помеховых факторов в виде движущихся посторонних объектов. Заданная граница дальности 21 на расстоянии Lg от оптической системы изображена, например, на фиг. 2 в виде условной линии. Таким образом, если процессор 15 зарегистрировал наличие нарушения охраняемого рубежа, и если оно произошло в заданной границе дальности, то рассчитанная по формуле (1) величина F покажет (в дробном выражении) расстояние до места нарушения относительно заданной границы дальности. К примеру, рассчитанная величина F=0,48 будет означать, что объект нарушения пересек рубеж охраны на расстоянии 48 м от оптической системы. При необходимости процессор 15 может выполнить пересчет расстояния Lx до места нарушения от оптической системы в метрах. Если в нашем примере рассчитанная величина F=0,92, то это будет означать, что пересечение охраняемого рубежа произошло за пределами заданной границы дальности Lg и воздействие движущимся объектом на зону обнаружения будет расценено как воздействие помехового фактора. Следует заметить, что в конфигурации секторов зоны обнаружения (см. фиг. 3) имеется «мертвая» зона вблизи оптической системы по определению расстояния до объекта нарушения. Точка 26 является точкой окончания этой зоны. Учитывая, что расстояние m небольшое (обычно не более 1 м), то «мертвой» зоной можно пренебречь.
Скорость V движения объекта нарушения можно определить (фиг. 2, 4) по времени tv прохождения им расстояния m, равного величине сдвига секторов зоны обнаружения друг относительно друга. Это время можно измерить между нарастающими фронтами сигналов логического уровня с выходов первого 11 и второго 12 компараторов (эпюры 27 и 28 на фиг. 4).
Скорость V определяется по формуле:

На фиг. 4 приведен сигнал, соответствующий интервалу времени формирования в процессоре величины скорости V движения объекта нарушения через охраняемый рубеж (эпюра 31). Значение скорости V может быть вычислено на начальной стадии движения объекта нарушения через охраняемый рубеж (еще до пересечения им линии РСН).
Поперечный размер R объекта нарушения можно определить (фиг. 2, 4) по времени tR прохождения им расстояния m с учетом собственного поперечного размера R. Это время можно измерить между спадающими фронтами сигналов логического уровня с выходов первого 11 и второго 12 компараторов (эпюры 27 и 28 на фиг. 4).
Поперечный размер R объекта нарушения можно определить из соотношения:

Откуда:

Направление движения объекта нарушения через охраняемый рубеж («к нам» или «от нас») можно определить по последовательности формирования во времени сигналов логического уровня с выходов первого 11 и второго 12 компараторов (эпюры 27 и 28 на фиг. 4). В данном, например, случае можно трактовать, что объект нарушения двигается «к нам». При другом расположении по времени сигналов (сначала появляется сигнал на эпюре 28, а затем появляется сигнал на эпюре 27) - объект нарушения двигается «от нас».
Во время сигнала, приведенного на эпюре 33, происходит завершение обработки исходных сигналов в процессоре 15 с учетом ограничения дальности действия и формирования сигнала тревоги. В конце этого интервала времени происходит передача всей тревожной информации (расстояния Lx до места нарушения, поперечного размера R объекта нарушения, скорости V и направления его движения через охраняемый рубеж) на внешний пункт сбора и отображения информации посредством радиомодема 16 через радиоканал связи 17. Исходя из тактических соображений, граница дальности Lg может быть изменена по команде, получаемой по радиоканалу связи 17 от внешнего пункта сбора и отображения информации.
Работа процессора 15 заключается в следующем. На примере, приведенном на фиг. 4, процессор 15 при поступлении двух сигналов логического уровня (27 и 28) инициирует начало процедуры обработки исходных сигналов. При этом процессор 15 выполняет следующую последовательность операций:
1. Определение скорости V движения объекта нарушения по формуле (2).
2. Определение расстояния Lx до места нарушения от оптической системы в соответствии с рассчитанной по формуле (1) величиной F.
3. Сравнение расстояния Lx с заданной границей дальности Lg. Если расстояние Lx не превышает заданной границы дальности, то процессор продолжает процедуру обработки исходных сигналов. Если расстояние Lx находится за пределом границы дальности, то процедура обработки завершается и воздействие на зону обнаружения ПИКСО расценивается как воздействие помехового фактора.
4. Формирование сигнала тревоги при пересечении объектом нарушения линии РСН.
5. Определение поперечного размера R объекта нарушения по формуле (4).
6. Определение направления движения объекта нарушения («к нам» или («от нас»).
7. Передача сигнала тревоги и информации о расстоянии Lx, поперечном размере R объекта нарушения, скорости V и направлении его движения через охраняемый рубеж в радиомодем 16 для дальнейшей их передачи на внешний пункт сбора и отображения информации.
Интеллектуальность предлагаемого ПИКСО обеспечивается тем, что в нем реализованы следующие возможности:
- определение скорости V движения объекта нарушения;
- определение расстояния Lx до места нарушения от оптической системы;
- определение поперечного размера R объекта нарушения;
- определение направления движения объекта нарушения («к нам» или («от нас»);
- ограничение дальности действия путем задания границы дальности и связанное с этим повышение помехоустойчивости;
- изменение границы дальности по команде, получаемой по радиоканалу связи от внешнего пункта сбора и отображения информации.
Информация о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направлении его движения через охраняемый рубеж дает возможность идентифицировать объект нарушения по классам (человек, мелкое животное или птица, транспортное средство), что дает дополнительную информацию службе охраны для задержания нарушителя.
Оптическая система 1 может быть выполнена разными способами: с возможностью использования оптических линз, или линз Френеля, или зеркальной оптики, а также с возможностью их комбинирования.
Действующий лабораторный макет интеллектуального ПИКСО подвергался всесезонным испытаниям в течение одного года. Была подтверждена работоспособность действующего лабораторного макета по обнаружению объектов нарушения и его устойчивость к помехам, действующим за заданной границей дальности.
Введенные дополнительные признаки и функциональные связи позволяют придать интеллектуальному ПИКСО новые существенные свойства и расширить область его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пассивное инфракрасное устройство для обнаружения нарушителя с формированием граничных сигналов | 2017 |
|
RU2661751C1 |
| ПАССИВНАЯ ИНФРАКРАСНАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ФОРМИРОВАНИЕМ ГРАНИЧНЫХ СИГНАЛОВ | 2014 |
|
RU2571589C1 |
| Интеллектуальная сеть технических средств обнаружения с возможностью функционирования в среде big data для контроля периметров и территорий объектов | 2018 |
|
RU2682013C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| Интеллектуальный радиолучевой датчик для тревожной сигнализации | 2015 |
|
RU2610549C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| Инфракрасная активная система для контроля протяженных рубежей охраны | 2019 |
|
RU2722927C1 |
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| ВИБРОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2541129C2 |
Изобретение относится к средствам тревожной сигнализации, предназначенным для обнаружения объекта нарушения, проникающего через зону обнаружения рубежа охраны и вызвавшего срабатывания средства тревожной сигнализации по факту преодоления объектом нарушения зоны обнаружения во время пересечения объектом нарушения этого рубежа охраны. Интеллектуальное пассивное инфракрасное средство обнаружение (ПИКСО) состоит из оптической системы, формирующей два расходящихся сектора зоны обнаружения, смещенных в пространстве друг относительно друга, инфракрасного датчика с первым и вторым пироэлектрическими элементами, двух аналоговых каналов, элемента И, элемента ИЛИ, процессора и радиомодема. Каждый аналоговый канал содержит полосовой фильтр, усилитель, выпрямитель и компаратор. Заявленное изобретение обеспечивает возможность ограничения дальности действия и получение информации о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направления его движения через охраняемый рубеж. Вместе с тем возможность ограничения дальности действия позволяет повысить помехоустойчивость интеллектуального ПИКСО, что исключает наличие ложных срабатываний из-за изменений температуры и солнечных «засветок» за границей зоны чувствительности, а также влияние помеховых факторов в виде движущихся посторонних объектов. 6. з.п. ф-лы, 4 ил.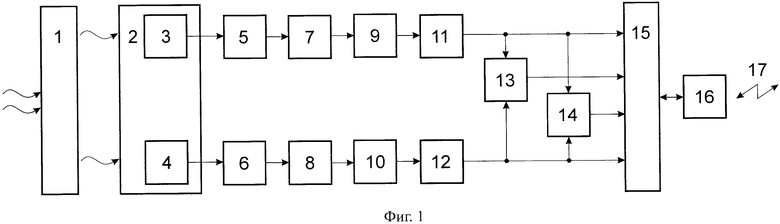
1. Интеллектуальное пассивное инфракрасное средство обнаружения (ПИКСО), содержащее оптическую систему, формирующую первый и второй секторы зоны обнаружения, смещенные в пространстве друг относительно друга, инфракрасный датчик с первым и вторым пироэлектрическими элементами, причем первый и второй секторы зоны обнаружения сфокусированы с помощью оптической системы соответственно на оптические входы первого и второго пироэлектрических элементов, первый аналоговый канал, в состав которого входят первый компаратор и последовательно соединенные первый полосовой фильтр и первый усилитель, выход первого пироэлектрического элемента соединен со входом первого полосового фильтра, выход первого компаратора подключен к первому входу процессора, выполненного с возможностью формирования сигнала тревоги и передачи его на внешний пункт сбора и отображения информации посредством подключенного к процессору радиомодема, связанного по радиоканалу с внешним пунктом сбора и отображения информации, отличающееся тем, что в него дополнительно введены: второй аналоговый канал, элемент И, элемент ИЛИ, в первый аналоговый канал введен первый выпрямитель, во второй аналоговый канал введены последовательно соединенные второй полосовой фильтр, второй усилитель, второй выпрямитель и второй компаратор, выход первого усилителя в первом аналоговом канале подключен ко входу первого выпрямителя, выход которого подключен ко входу первого компаратора, выход второго пироэлектрического элемента соединен со входом второго полосового фильтра, выход второго компаратора подключен ко второму входу процессора, первый и второй входы элемента И подключены соответственно к выходам первого и второго компараторов, а его выход подключен к третьему входу процессора, первый и второй входы элемента ИЛИ подключены соответственно к выходам первого и второго компараторов, а его выход подключен к четвертому входу процессора, который выполнен с дополнительной возможностью анализа сигналов первого и второго аналоговых каналов с целью ограничения дальности действия интеллектуального ПИКСО путем задания границы дальности, определения расстояния до места нарушения, поперечного размера объекта нарушения, а также скорости и направления его движения через охраняемый рубеж.
2. Интеллектуальное ПИКСО по п. 1, отличающееся тем, что оптическая система выполнена с возможностью использования оптических линз.
3. Интеллектуальное ПИКСО по п. 1, отличающееся тем, что оптическая система выполнена с возможностью использования линз Френеля.
4. Интеллектуальное ПИКСО по п. 1, отличающееся тем, что оптическая система выполнена с возможностью использования зеркальной оптики.
5. Интеллектуальное ПИКСО по п. 1, отличающееся тем, что оптическая система выполнена с возможностью комбинирования оптических линз, линз Френеля и зеркальной оптики.
6. Интеллектуальное ПИКСО по п. 1, отличающееся тем, что оно выполнено с возможностью передачи информации о расстоянии до места нарушения, поперечном размере объекта нарушения, скорости и направления его движения через охраняемый рубеж на внешний пункт сбора и отображения информации посредством радиоканала связи.
7. Интеллектуальное ПИКСО по п. 1, отличающееся тем, что оно выполнено с возможностью изменения границы дальности по команде, получаемой по радиоканалу связи от внешнего пункта сбора и отображения информации, в зависимости от тактических соображений.
| US 8009044 B2, 30.08.2011 | |||
| US 9116037 B2, 25.08.2015 | |||
| Вагонетка с опрокидным кузовок | 1949 |
|
SU81357A1 |
| US 6525568 B2, 25.02.2003. | |||

