Изобретение относится к области охранной сигнализации, в частности к устройствам тревожной сигнализации, предназначенным для обнаружения нарушителя, проникающего через зону обнаружения рубежа охраны и вызывающего срабатывания устройства тревожной сигнализации по факту преодоления нарушителем зоны обнаружения, создаваемой радиоволновым устройством для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний. Отличительной особенностью изобретения является повышение функциональной надежности за счет ограничения зоны обнаружения устройства в дальней области и повышения помехоустойчивости устройства по отношению к подвижным объектам, находящимся за границей зоны обнаружения устройства, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами.
Общеизвестны радиоволновые радары с непрерывным излучением частотно-модулированных колебаний, которые обнаруживают изменения в зоне обнаружения за счет излучения периодически модулированного по частоте зондирующего сигнала, приема отраженного от объекта сигнала, перемножения излучаемого и принятого сигналов, усиления в заданной полосе частот и анализа полученного в результате перемножения сигнала в частотной области. Теоритические основы работоспособности таких радаров описаны, например, в книге И.В. Комарова и С.М. Смольского «Основы теории радиолокационных систем с непрерывным излучением частотно-модулированных колебаний» - М.: Горячая линия - Телеком, 2010 г. Базовая структурная схема частотно-модулированных (ЧМ) радиолокационных станций (РЛС) представлена на рис. 2.1 (с. 34) данной книги. В состав ЧМ РЛС входят передающая и приемная антенны, модулятор, ЧМ генератор, смеситель, блок обработки преобразованного сигнала и блок индикации. ЧМ РЛС широко используются в качестве радиовысотомеров, уровнемеров, транспортных радаров, охранных систем и т.п.
К подобным устройствам можно отнести, например, радиолокационную систему с линейной частотной модуляцией «FMCW radar system with linear frequency modulation)), описанную в патенте US №5252981, МПК G01S 13/34, опубл. 1993 г. и содержащую антенну, радарный блок (в состав которого входят: генератор, управляемый напряжением, циркулятор и смеситель), аналого-цифровой преобразователь (АЦП), цифроаналоговый преобразователь (ЦАП) и вычислительное средство, содержащее цифровые порты, микрокомпьютер с памятью и модуль интерфейса связи. Работа системы основана на излучении радарным блоком с антенной в контролируемое пространство зондирующего сигнала в виде непрерывной линейно-модулированной частоты, которая, отражаясь от цели, возвращается обратно в радарный блок, где с помощью циркулятора и смесителя формируется более низкая промежуточная частота (частота биений), которая содержит информацию для определения расстояния до объекта (цели). Эта частота оцифровывается с помощью АЦП и поступает на вход вычислительного средства для окончательной обработки. Основной задачей данной системы является осуществление контроля линейности передаваемой линейно-модулированной частоты с целью повышения точности определения расстояния до цели за счет устранения нежелательных искажений, связанных с нелинейностью отдельных локальных участков зондирующего сигнала. Проверка линейности осуществляется с помощью использования преобразования Гильберта. Для проверки линейности вычислительным устройством реализуется алгоритм корректировки спектра, включающий в себя следующие операции: прямое БПФ, перемножение с функцией апертуры, вычисление спектра аналитического сигнала, обратное БПФ и расчет мгновенной частоты в соответствии с приведенным в описании патента аналитическим выражением.
Сходными существенными признаками заявленного устройства и вышеупомянутой системы являются: антенна, радарный блок, АЦП и вычислительное средство.
Недостатком системы является низкая помехоустойчивость при обнаружении человека-нарушителя, обусловленная внешними помеховыми факторами, такими как качание травяного покрова и мелкого кустарника в зоне обнаружения системы, наличием подвижных объектов, находящихся за пределами зоны обнаружения, а также наличием неподвижных объектов, расположенных как в зоне обнаружения, так и за ее пределами.
Известен «Способ обнаружения объекта с частотой модулированного непрерывного действия (FMCW) в пределах системы» (Method for detecting an object with a frequency modulated continuous wave (FMCW) ranging system), описанный в патенте US №8339305, МПК G01S 13/08, опубл. в 2012 г., который использует рекурсивный механизм (механизм последовательных приближений) для обеспечения работоспособности устройства на открытом воздухе при достижении достаточной точности по обнаружению объекта. Способ включает передачу сигнала с линейно-частотной модуляцией (ЛЧМ) по направлению к объекту, получение отраженного от объекта сигнала, получение разности частот и анализ частотного спектра для определения частоты, связанной с обнаруживаемым объектом. При реализации указанного алгоритма из спектра последовательно шаг за шагом (в виде итераций) с помощью частотного «окна» выделяются нужные частотные пики и отбрасывается ненужный шум.
Сходными существенными признаками заявленного устройства и вышеупомянутого способа являются: передача сигнала с линейно-частотной модуляцией (ЛЧМ) по направлению к объекту, получение отраженного от объекта сигнала, получение разности частот и анализ частотного спектра.
Недостатком способа является недостаточная помехоустойчивость при обнаружении человека-нарушителя, обусловленная наличием подвижных объектов, находящихся за пределами зоны обнаружения, а также наличием неподвижных объектов, расположенных как в зоне обнаружения, так и за ее пределами.
Известен «Радарный датчик» (Radar sensor), описанный в патенте US №7576685, МПК G01S 13/00, G01S 7/40 опубл. 2009 г. и содержащий приемо-передающее устройство, аналого-цифровой преобразователь (АЦП), запоминающее устройство, блок быстрого преобразования Фурье (БПФ), блок обратного БПФ, компаратор и анализатор спектра. Изобретение, описанное в данном патенте, направлено на улучшение надежности радарного датчика путем введения функции самотестирования с бэк-трансформацией (трансформацией назад). Наличие этой функции дает возможность в процессе работы радара немедленно обнаруживать ошибки, возникающие в приемо-передающем тракте радара.
Сходными существенными признаками являются: приемо-передающее устройство, АЦП, БПФ и анализатор спектра.
Недостатком устройства является низкая помехоустойчивость по отношению к объектам, находящимся за границей зоны обнаружения радара.
Известно «Устройство обработки FM-CW радара» (FM-CW radar processing device), описанное в патенте US №6674393, МПК G01S 13/38, опубл. 2004 г., содержащее радарную антенну со сканирующим механизмом, генератор, управляемый напряжением, преобразователь частоты (смеситель), генератор модулирующего сигнала, блок управления генератором модулирующего сигнала, фильтр основной полосы, АЦП и центральный процессор. Устройство излучает в контролируемое пространство с помощью радарной антенны зондирующий сигнал в виде непрерывной линейно-модулированной частоты, причем часть передаваемого сигнала отделяется и поступает в преобразователь частоты, который функционирует в качестве смесителя. Сигнал, отраженный от объекта, принимается с помощью радарной антенны и смешивается в преобразователе частоты с выходным сигналом генератора, управляемого напряжением для формирования более низкой промежуточной частоты биений. Сигнал биений пропускают через фильтр основной полосы, преобразуют в цифровой сигнал, который подают далее в центральный процессор, где выполняют быстрое преобразование Фурье для определения расстояния до объекта и его относительной скорости движения в зоне обнаружения. Основной задачей алгоритма обработки, реализованного в данном устройстве, является задача обнаружения нескольких движущихся объектов в зоне обнаружения путем разделения пар пиковых частот от разных объектов (путем ликвидации нежелательных «спариваний»), что способствует повышению надежности устройства по достоверному обнаружению объектов. Эта задача решается путем изменения в процессе работы устройства параметров модулирующего сигнала: периода частоты модуляции, центральной частоты и девиации частот зондирующего сигнала.
Сходными существенными признаками заявленного устройства и вышеупомянутого устройства являются: радарная антенна, генератор, управляемый напряжением, преобразователь частоты (смеситель), генератор модулирующего сигнала, АЦП и центральный процессор.
Недостатком датчика является низкая помехоустойчивость по отношению к подвижным объектам, находящимся за границей зоны обнаружения радара, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами.
Известно устройство «Радар для определения расстояния до цели» (Radar for detecting the distance to a target), описанное в патенте US №6593874, МПК G01S 13/34, опубл. 2003 г., содержащее генератор, управляемый напряжением, изолятор, ответвитель, циркулятор, смеситель, антенну, усилитель промежуточной частоты (УПЧ), АЦП, ЦАП и центральный процессор. Устройство излучает в контролируемое пространство с помощью антенны зондирующий сигнал в виде непрерывной линейно-модулированной частоты, который отражается от объекта (цели), принимается антенной и смешивается в смесителе с частью выходного сигнала генератора, управляемого напряжением для формирования более низкой промежуточной частоты, которая усиливается в УПЧ с помощью заранее определенного коэффициента усиления в соответствии с расстоянием до объекта. АЦП преобразует сигнал напряжения в цифровые данные, которые поступают в центральный процессор для вычисления расстояния до объекта обнаружения и скорости его движения. Алгоритм работы центрального процессора основан на раздельном определении пиков верхней и нижней частот, соответственно, нарастающего и спадающего участков зондирующего сигнала с последующим вычислением расстояния (пропорционально сумме частот этих пиков) и относительной скорости (пропорционально разности частот этих пиков). Надежность работоспособности устройства, согласно патенту, повышается за счет устранения насыщения смесителя путем корректировки частотной характеристики УПЧ с помощью использования разных схемотехнических воплощений.
Сходными существенными признаками заявленного устройства и вышеупомянутого устройства являются: генератор, управляемый напряжением, ответвитель, смеситель, циркулятор, антенна, УПЧ, АЦП и центральный процессор.
Недостатком устройства является низкая помехоустойчивость по отношению к подвижным объектам, находящимся за границей зоны обнаружения радара, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами.
Известно устройство «Радар для обнаружения цели на основе частотной составляющей» (Radar for detecting a target based on a frequency component), описанное в патенте US №6795012, МПК G01S 13/93, опубл. 2004 г., содержащее генератор, управляемый напряжением, изолятор, ответвитель, циркулятор, смеситель, антенну, усилитель промежуточной частоты (УПЧ), АЦП, ЦАП, волновой модулятор и процессор цифровых сигналов (DSP), содержащий блок удаления постоянных компонент, модуль быстрого преобразования Фурье, пик-детектор и вычислитель расстояния и скорости. Устройство излучает в контролируемое пространство с помощью антенны зондирующий сигнал в виде непрерывной линейно-модулированной частоты, который отражается от объекта (цели), принимается антенной и смешивается в смесителе с частью выходного сигнала генератора, управляемого напряжением для формирования более низкой промежуточной частоты, которая усиливается в УПЧ. АЦП преобразует сигнал напряжения в цифровые данные, которые поступают в процессор цифровых сигналов (DSP) для вычисления расстояния до объекта обнаружения и относительной скорости его движения. Алгоритм работы центрального процессора основан на определении интервалов нарастающей и спадающей частей зондирующего сигнала, вычисления средних значений из полученных данных, вычитания из принятого сигнала средних значений в интервалах выборки, получения частотных составляющих (с помощью БПФ) для нарастающей и спадающей частей зондирующего сигнала, нахождения и «спаривания» пиков нарастающей и спадающей частей зондирующего сигнала с последующим вычислением расстояния (пропорционально сумме частот этих пиков) и относительной скорости (пропорционально разности частот этих пиков). Надежность работоспособности устройства, согласно патенту, повышается за счет вычитания из полученных данных постоянных компонент, что увеличивает соотношение сигнал/шум и обеспечивает более достоверное обнаружение человека-нарушителя в ближнем участке зоны обнаружения за счет сужения спектра. Во втором варианте устройства надежность при обработке сигналов дополнительно повышается за счет использования процессора с функцией окна, обеспечивающего ослабление боковых лепестков спектра.
Сходными существенными признаками заявленного устройства и вышеупомянутого устройства являются: генератор, управляемый напряжением, ответвитель, смеситель, циркулятор, антенна, усилитель промежуточной частоты (УПЧ), АЦП и процессор цифровых сигналов (DSP), содержащий модуль быстрого преобразования Фурье.
Недостатком устройства является низкая помехоустойчивость по отношению к подвижным объектам, находящимся за границей зоны обнаружения радара, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами.
Все упомянутые недостатки частично устраняются в наиболее близким по технической сущности к заявленному изобретению, известном устройстве «Настраиваемый радарный датчик» (Configurable radar sensor), описанном в патенте US №7612707, МПК G01S 13/00, G01S 13/08, опубл. 2009 г. Это устройство содержит датчик (sensor), сигнальный процессор, блок памяти, пороговый процессор, модуль связи (communications) и индикатор. В свою очередь, сигнальный процессор содержит модули: характеристик, компиляции (усреднения), генерации по полиномиальной кривой, оценки отклонений от порогов, оценки отклонения от фона и модуль вычитания. Блок памяти содержит пороговые значения и информацию о типах сигналов. Пороговый процессор содержит модуль определения пороговых значений. Датчик (sensor) представляет собой радиолокационную систему на основе непрерывного излучения ЛЧМ (FM-CW) колебаний и содержит: первую антенну для излучения сигналов и вторую антенну для приема отраженных сигналов, генератор колебаний, генератор, управляемый напряжением (ГУН), смеситель (для смешивания переданного сигнала с принятым сигналом) и сигнальный процессор (для обработки смешанного сигнала). Две антенны направлены в контролируемое пространство, образуя зону обнаружения устройства («поле зрения» устройства или «сцену»). Устройство излучает в контролируемое пространство зондирующий сигнал в виде непрерывной линейно-модулированной частоты, который отражается от объекта (цели), принимается устройством и смешивается в смесителе с частью выходного сигнала ГУН. Сигнальный процессор фильтрует, модифицирует и анализирует смешанный сигнал для дальнейшего определения наличия изменений в зоне обнаружения устройства (для определения изменения «сцены»). Алгоритм работы устройства основан на получении смешанного сигнала, обработке его во временной области, фильтрации шума, преобразовании смешанного сигнала из временной области в частотную область (БПФ), обработке сигнала в частотной области и проверке наличия изменений в зоне обнаружения устройства (изменилась ли «сцена»?). Обработка сигнала в частотной области заключается в усреднении параметров сигнала в заданном временном окне, определении характеристик сигнала (амплитуды пиков, частоты пиков), назначении пороговых значений по амплитуде и частоте, установлении шумовых порогов и сравнении текущих значений анализируемого сигнала с назначенными и установленными пороговыми значениями. Процесс обнаружения повторяется циклически до тех пор, пока устройство не выявит изменения «сцены» под действием объекта, после чего принимается решение об обнаружении движущего объекта и формируется соответствующий сигнал, который индицируется на индикаторе и передается посредством модуля связи во внешнюю среду. Надежность работоспособности устройства по обнаружению нарушителя, согласно патенту, повышается за счет использования усреднений для исключения статических (не меняющихся) характеристик и выделения динамических изменений.
Общими существенными признаками с заявляемым решением являются: первая антенна для излучения сигналов и вторая антенна для приема отраженных сигналов, генератор колебаний, генератор, управляемый напряжением (ГУН), смеситель, сигнальный процессор, блок памяти, модуль связи (communications) и индикатор.
Недостатком устройства является низкая помехоустойчивость по отношению к подвижным объектам, находящимся за границей зоны обнаружения устройства.
Целью настоящего изобретения является повышение функциональной надежности за счет ограничения зоны обнаружения устройства в дальней области и повышения помехоустойчивости по отношению к подвижным объектам, находящимся за границей зоны обнаружения устройства, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами.
Для достижения этой цели в известное техническое решение введены новые существенные признаки, функциональные элементы и связи, которые позволяют повысить функциональную надежность устройства.
Эта цель достигнута, во-первых, в предложенном первом варианте радиоволнового устройства для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний, которое содержит генератор колебаний, сигнальный процессор, выполненный с возможностью вычисления функции быстрого преобразования Фурье (БПФ) для n-числа гармоник, блок памяти, модуль связи, исполнительное устройство (индикатор) и модуль СВЧ, содержащий передающую и приемную антенны, генератор, управляемый напряжением, и смеситель, выход генератора колебаний подключен ко входу модуля СВЧ, первый вход/выход сигнального процессора соединен со входом/выходом блока памяти, второй его вход/выход соединен со входом/выходом модуля связи, а первый выход соединен со входом исполнительного устройства (индикатора), выход модуля СВЧ подключен к первому входу усилителя с АРУ, выход которого через последовательно соединенные полосовой фильтр и аналого-цифровой преобразователь (АЦП) подключен к входу сигнального процессора, второй выход которого подключен к второму входу усилителя с АРУ, а третий выход подключен к входу генератора колебаний. В модуль СВЧ дополнительно введены ответвитель и усилитель частоты биений, выход которого является выходом модуля СВЧ, вход генератора, управляемого напряжением, является входом модуля СВЧ, а его выход подключен ко входу ответвителя, первый выход которого подключен к передающей антенне, а второй его выход подключен к первому входу смесителя, второй вход которого подключен к приемной антенне, а его выход подключен к входу усилителя частоты биений. Сигнальный процессор выполнен с дополнительными возможностями регулирования коэффициента усиления усилителя с АРУ, сортировки обрабатываемых гармоник по тангенциальным и радиальным составляющим, вычисления математического ожидания и дисперсии амплитуд частотных отсчетов, обработки результатов вычислений матричным способом по выбранному числу из n-гармоник и принятия окончательного решения об обнаружении нарушителя с формированием сигнала срабатывания устройства (сигнала тревоги).
Во-вторых, повышение функциональной надежности достигнуто в предложенном втором варианте устройства, в котором в отличие от первого варианта в модуль СВЧ дополнительно введены циркулятор и усилитель частоты биений, а вместо передающей и приемной антенн введена приемопередающая антенна, выход усилителя частоты биений является выходом модуля СВЧ, вход генератора, управляемого напряжением, является входом модуля СВЧ, а его выход подключен ко входу циркулятора и к первому входу смесителя, второй вход которого подключен к выходу циркулятора, вход/выход которого подключен к приемо-передающей антенне, выход смесителя подключен к входу усилителя частоты биений.
Сущность изобретения поясняется фиг. 1-6, на которых изображено следующее.
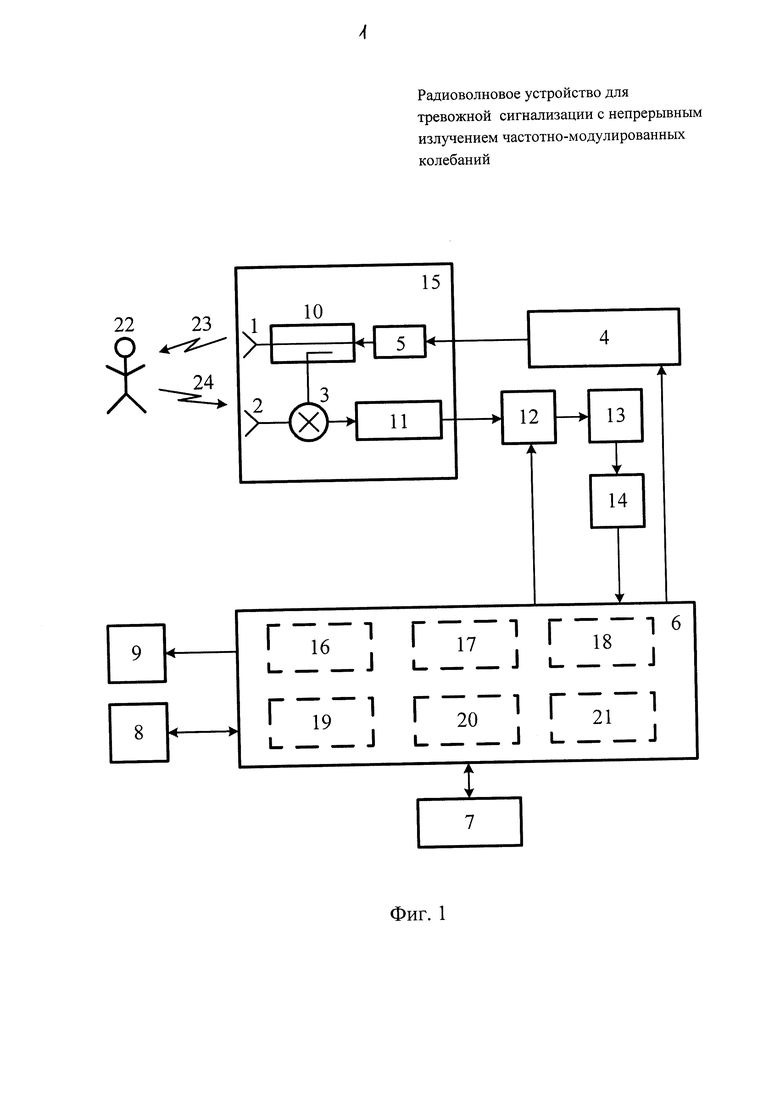
На фиг. 1 приведена структурная схема радиоволнового устройства для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний, где введены обозначения: передающая антенна - 1, приемная антенна - 2, смеситель - 3, генератор колебаний - 4, генератор, управляемый напряжением - 5, сигнальный процессор - 6, блок памяти - 7, модуль связи - 8, исполнительное устройство (индикатор) - 9, ответвитель - 10, усилитель частоты биений - 11, усилитель с АРУ - 12, полосовой фильтр - 13, аналого-цифровой преобразователь (АЦП) - 14, модуль СВЧ - 15, модуль АРУ - 16, модуль БПФ - 17, модуль сортировки обрабатываемых гармоник - 18, модуль вычисления математического ожидания - 19, модуль вычисления дисперсии - 20, модуль обработки результатов и принятия решения - 21. На фиг. 1 также изображены человек-нарушитель - 22, пересекающий зону обнаружения рубежа охраны, направление излучения - 23 зондирующего сигнала и направление - 24 приема отраженного сигнала.
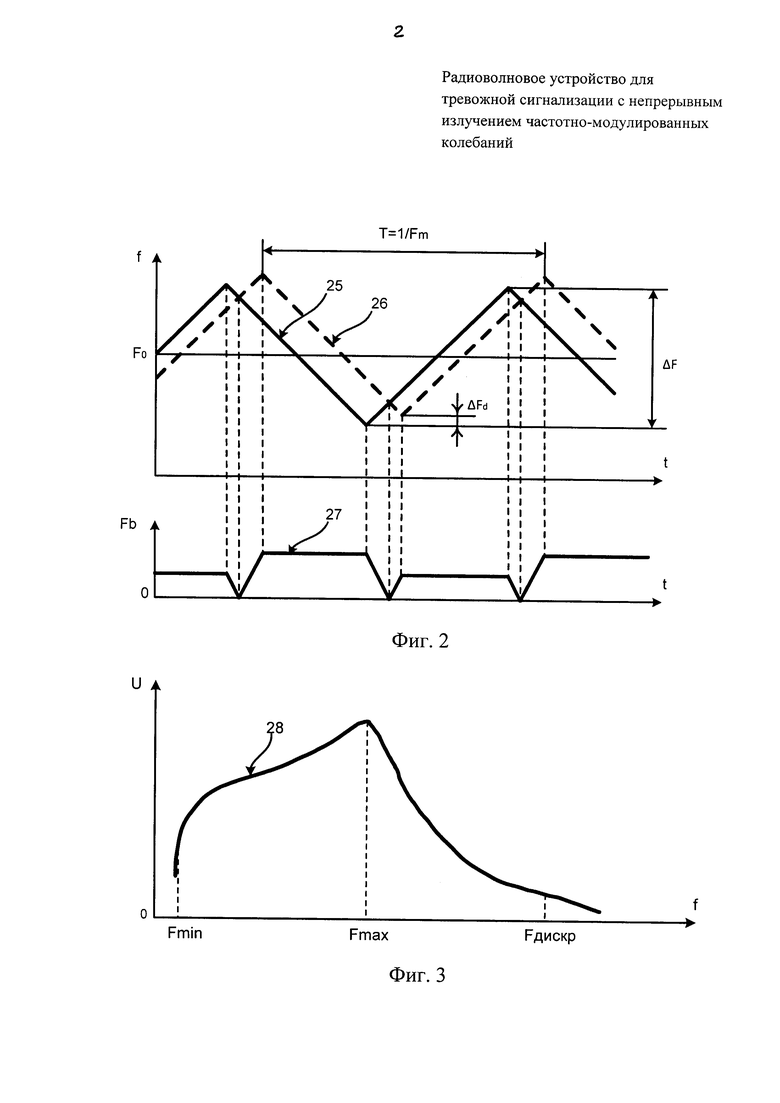
На фиг. 2 приведен пример частотных вариаций зондирующего сигнала и отраженного сигнала, вызванного движением человека-нарушителя 22 в зоне обнаружения радиоволнового устройства для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний. На фиг. 2 введены обозначения: излучаемый зондирующий сигнал - 25, отраженный сигнал - 26, частота биений - 27.
На фиг. 3 приведен пример амплитудно-частотной характеристики (АЧХ) полосового фильтра 13. Введено обозначение: форма кривой АЧХ - 28.
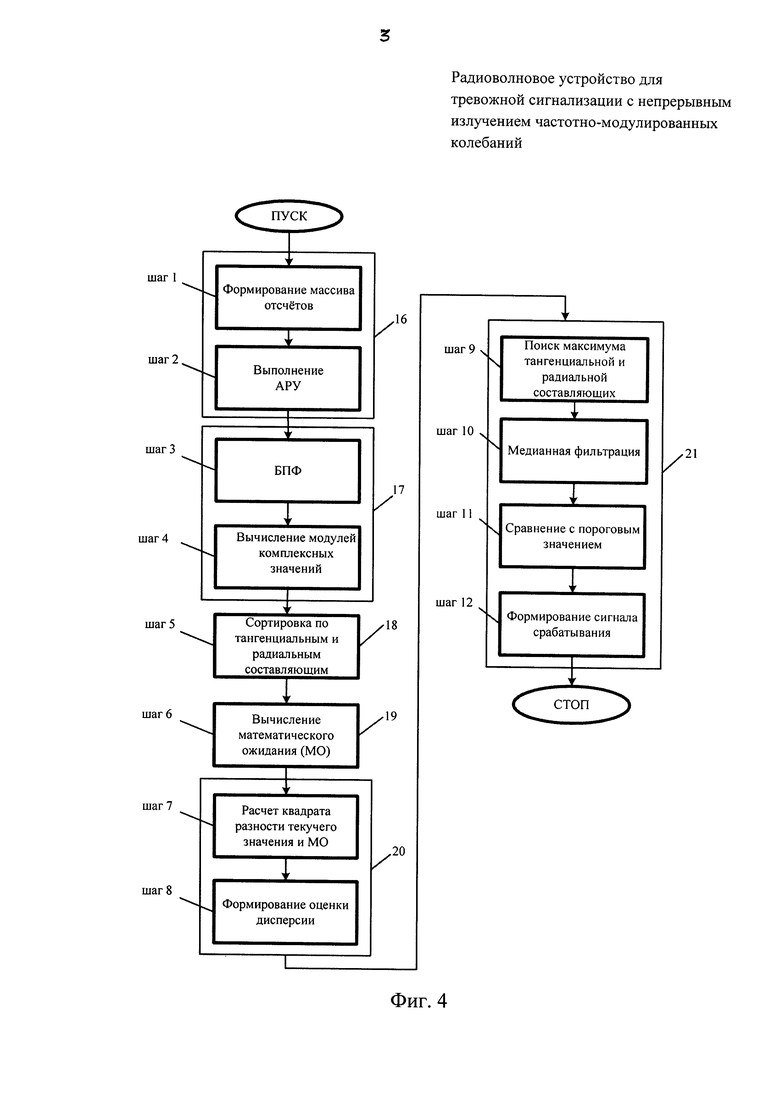
На фиг. 4 приведен пример алгоритма обработки сигналов, реализованный сигнальным процессором 6.
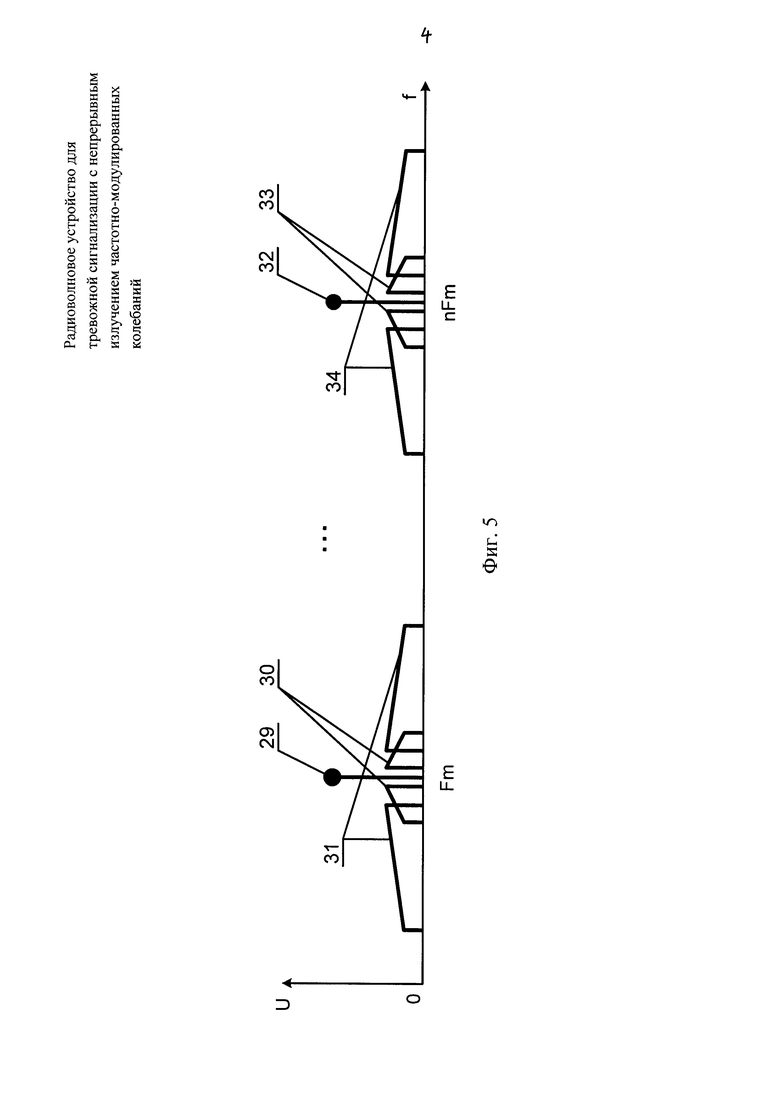
На фиг. 5 условно изображены полосы пропускания и границы изменения спектров для тангенциальных и радиальных составляющих обрабатываемых гармоник полезного сигнала. На фиг. 5 введены обозначения: основной канал главной гармоники Fm, выделяющий тангенциальную составляющую направления движения человека-нарушителя - 29, два субканала боковых гармоник главной гармоники Fm, выделяющие доплеровский сдвиг частоты радиальной составляющей направления движения человека-нарушителя (соответственно 30 и 31). Аналогично введены обозначения для каналов кратных гармоник nFm, выделяющих тангенциальную и радиальную составляющие соответствующих гармоник (32, 33 и 34).
На фиг. 6 приведена структурная схема модуля СВЧ 15, используемого во втором варианте применения устройства. На фиг. 6 введены обозначения: циркулятор - 35, приемо-передающая антенна - 36.
При описании работы устройства будем в качестве иллюстрации приводить параметры и технические характеристики на примере одного из его реальных воплощений.
Первый вариант предложенного устройства (фиг. 1) работает следующим образом.
Устройство излучает в зону обнаружения в направлении 23 с помощью передающей антенны 1 зондирующий сигнал в виде непрерывной линейно-модулированной частоты. Этот зондирующий сигнал представлен на фиг. 2 (эпюра 25). Изменение частоты на нарастающих и спадающих участках зондирующего сигнала осуществляется по линейному закону. Центральной частотой зондирующего сигнала является частота Fo, относительно которой происходит изменение частоты зондирующего сигнала с девиацией ΔF. Для устройства, используемого в качестве примера воплощения, центральная частота Fo равна 9,4 ГГц, а девиация ΔF равна 400 МГц (изменение частоты от 9,2 ГГц до 9,6 ГГц). Период следования зондирующего сигнала, измеренный по точкам перегиба нарастающих и спадающих участков (фиг. 2), определяется по формуле Т=1/Fm, (где Fm - частота главной гармоники зондирующего сигнала). Для примера воплощения устройства частота главной гармоники зондирующего сигнала Fm составляет 2,32 кГц (период Т равен 431 мкс). При движении человека-нарушителя 22 в зоне обнаружения зондирующий сигнал отражается от него в направлении 24 и принимается приемной антенной 2 предлагаемого устройства. Отраженный сигнал имеет временной сдвиг относительно зондирующего сигнала и представлен в виде эпюры 26 на фиг. 2. Следует отметить, что при движении в зоне обнаружения человека-нарушителя 22 формируется доплеровский сдвиг частот, отмеченный на фиг. 2 как ΔFd. Принятый приемной антенной 2 отраженный сигнал поступает на первый вход смесителя 3, где смешивается (перемножается) с передаваемым сигналом, часть энергии которого через ответвитель 10 поступает на второй вход смесителя 3. В результате такого смешивания (перемножения) формируется разностный сигнал с частотой биений Fb, эпюра 27 которого представлена на фиг. 2. Этот сигнал поступает на вход усилителя частоты биений 11, где усиливается до определенного значения. Управляет излучением зондирующего сигнала генератор колебаний 4, который передает полученную пилообразную форму зондирующего сигнала на вход генератора, управляемого напряжением 5, который генерирует, в свою очередь, зондирующий СВЧ-сигнал для излучения его в зону обнаружения. Элементы 1, 2, 3, 5, 10 и 11 конструктивно выполнены в виде отдельного модуля - модуля СВЧ 15. Разностный сигнал частоты биений поступает на первый вход усилителя с АРУ 12, где усиливается до определенного уровня и поступает далее на вход полосового фильтра 13. После фильтрации сигнал частоты биений оцифровывается с помощью аналого-цифрового преобразователя (АЦП) 14 и поступает в сигнальный процессор 6, где осуществляется основная его обработка. Второй вход усилителя с АРУ 12 является входом управления, по которому от сигнального процессора 6 поступают сигналы управления на уменьшение или увеличение его коэффициента усиления. Полосовой фильтр 13 имеет амплитудно-частотную характеристику (АЧХ), форма которой представлена на фиг. 3 (эпюра 28). Эта АЧХ имеет подъем от частоты Fmin до частоты Fmax, потом резкий спуск до значения частоты дискретизации Fдиск с дальнейшим ее понижением. Основной алгоритм обработки сигналов в сигнальном процессоре 6 представлен на фиг. 4. Алгоритм основан на последовательном повторении во времени 12 - и шагов (этапов) обработки, отмеченных на фиг. 4 символами: шаг 1… шаг 12. Некоторые шаги (этапы) обработки объединены в модули. Общее количество модулей равно шести. Эти модули обозначены на фиг. 1 и фиг. 4 позициями 16-21. Обработка сигналов в сигнальном процессоре 6 осуществляется на программном уровне с использованием констант, базы данных и управляющих программ, расположенных в блоке памяти 7. При движении человека-нарушителя в зоне обнаружения сигнал частоты биений (изображенный в виде эпюры 27 на фиг. 2) будет изменяться во времени по мере движения человека-нарушителя. Причем, динамично изменяться будут амплитуда, частота и фаза этого сигнала из-за пространственного наложения отраженного сигнала от движущего человека-нарушителя с отраженными сигналами от неподвижных предметов, находящихся в зоне обнаружения, а также от подстилающей поверхности (качание травяного покрова, листвы и ветвей кустарника, наличия дождя, града и т.п.). Изменяющийся во времени сигнал частоты биений далее будем называть «полезным сигналом», так как он несет полезную информацию о размере, расстоянии, направлении и скорости движения цели (в данном случае, человека-нарушителя). Обработка полезного сигнала в сигнальном процессоре начинается с формирования массива отсчетов (шаг 1) в модуле АРУ 16. Последовательность отсчетов полезного сигнала U(to), U(t1)…U(tk) разбивается на временные сегменты по m отсчетов в каждом сегменте. Значение m выбирается из ряда 2i, где i - положительное целое число. При этом ширина сегмента (или разрешение по частоте) Δf определяется как Δf=Fдиск/m, где Fдиск - частота дискретизации. В примере варианта воплощения устройства при I, равном 11, число отсчетов в сегменте m равно 2048, а выбранная частота дискретизации равна 296,6 кГц. В соответствии с вышеприведенной формулой ширина сегмента Δf в примере варианта воплощения устройства равна 144,8 Гц. Частота модуляции в устройстве (основной канал главной гармоники) Fm выбирается из условия Fm=Fдиск/2i. В примере варианта воплощения устройства Fm равна 2,32 кГц. При обработке полезного сигнала используются n гармоник, число которых определяется необходимой длинной зоны обнаружения и девиацией частоты зондирующего сигнала. При этом АЧХ устройства согласована с числом обрабатываемых гармоник и частотными интервалами между ними. В примере варианта воплощения устройства используются 47 гармоник (n1…n47), 40 гармоник (n1…n40) из которых являются полезными, а 7 гармоник (n41…n47) - дополнительными. При этом полоса частот полезного сигнала (полоса пропускания) составляет от 2,32 кГц до (2,32·40)=92,8 кГц. Таким образом, полезный сигнал, состоящий из 40 полезных гармоник (в указанной полосе пропускания) и 7-ми дополнительных, записывается в буфер блока памяти 7. Дополнительные гармоники используются в процессе обработки полезного сигнала для улучшения качества ограничения зоны обнаружения при наличии в зоне обнаружения и за ее пределами крупногабаритных объектов. Следующим шагом процесса обработки полезного сигнала (шаг 2), является осуществление автоматической регулировки усиления (АРУ) при включении электропитания устройства или при резкой смене погодных условий. В массиве отсчетов выбирается минимальное значение Uмин и максимальное значение Uмакс. Вычисляется размах сигнала как разница между Uмакс и Uмин. В зависимости от полученного уровня коэффициент усиления усилителя с АРУ 14 увеличивается или уменьшается. Режим АРУ может быть выполнен разными известными способами. В примере варианта воплощения устройства АРУ выполняется путем формирования цифрового кода для цифрового резистора, стоящего в обратной связи операционного усилителя. Изменение коэффициента усиления после включения электропитания устройства (в режиме быстрого АРУ) происходит с частотой 144,8 Гц и далее, по истечении времени 10 с, изменение коэффициента усиления переключается в режим медленного АРУ с частотой 0,5 Гц. Следующим этапом обработки полезного сигнала является вычисление функции БПФ в модуле БПФ 17, которое состоит из двух шагов: непосредственного вычисления комплексных значений функции БПФ (шаг 3) и вычисления модулей комплексных значений (шаг 4), как квадратных корней из суммы квадратов мнимой и действительной части (нахождение истинной длины вектора модуляции). В итоге вычислений получаем обновленный массив отсчетов функции БПФ с действительными значениями. Следующим этапом обработки полезного сигнала (шаг 5) является его сортировка по тангенциальным и радиальным составляющим в модуле 18. При пересечении зоны обнаружения человеком-нарушителем 22, его траектория движения может содержать как тангенциальную, так и радиальную составляющие вектора направления движения. По этой причине обработка полезного сигнала является многоканальной по гармоникам (каналам) дальности (Fm…nFm), связанных в основном с тангенциальными составляющими, и двухполосной для различных радиальных составляющих соответствующих гармоник дальности. Обработка полезного сигнала основана на разделении полосы частот на каналы дальности, состоящие из основного канала и двух субканалов. Расположение основных каналов и субканалов в частотной области по гармоникам (каналам) дальности приведено на фиг. 5. Основные каналы отмечены цифрами 29 и 32 на фиг. 5, а пары субканалов, соответственно, отмечены цифрами 30, 31 и 33, 34. Каждый основной канал дальности выделяет, главным образом, флуктуации эффективной поверхности рассеивания (ЭПР) человека-нарушителя, характерные для тангенциального направления его движения. Два субканала выделяют принятый сигнал, имеющий доплеровский сдвиг частоты (относительно соответствующего канала дальности) вследствие наличия в векторе движения человека-нарушителя радиальной составляющей. Разбиение на субканалы увеличивает помехоустойчивость устройства по отношению к движущимся объектам, находящимся за границей зоны обнаружения устройства, благодаря уменьшению мощности помехи в каждом из субканалов. Следует отметить, что оптимальная обработка полезного сигнала различна для различных вариантов пересечения человеком-нарушителем зоны обнаружения. К тому же, существует априорная неопределенность относительно дальности до человека-нарушителя и, соответственно, неопределенность номера n гармоники дальности на которую будет наложен полезный сигнал. Реализовать же сканирование по дальности невозможно из-за кратковременности времени наблюдения человека-нарушителя в зоне обнаружения. Таким образом, должна осуществляться параллельная и независимая обработка полезного сигнала, который может наблюдаться в любой из возможных гармоник дальности n и в любом частотном поддиапазоне nFm, то есть обработка полезного сигнала имеет матричную структуру. На фиг. 5 условно изображены полосы пропускания, реализованные в устройстве, и линейчатые спектры с соответствующими гармониками дальности Fm…nFm, которые кратны частоте Fm модулирующего сигнала. Линейчатые спектры условно показывают границы возможных динамических изменений реальных спектров сигналов (их «рассыпания») при движении человека-нарушителя через зону обнаружения. Процесс сортировки по тангенциальным и радиальным составляющим в модуле 18 заканчивается формированием отдельных массивов на основные каналы и соответствующие им субканалы. Следующим этапом обработки полезного сигнала в модуле 19 (шаг 6, фиг. 4) является вычисление математического ожидания (МО) амплитуд частотных отсчетов, выбранных из сформированных отдельных массивов. Далее осуществляется вычисление дисперсии (D) в модуле 20, которое осуществляется в два шага. Сначала рассчитывается сумма квадратов разности текущего значения и МО (шаг 7), а затем формируется оценка дисперсии D (шаг 8). Вычисления МО и D выполняются по известным формулам математической статистики. Окончательная обработка полезного сигнала осуществляется в четыре этапа в модуле обработки результатов и принятия решения 21. На первом этапе (шаг 9) производится поиск максимумов тангенциальных и радиальных составляющих, на втором этапе (шаг 10) осуществляется медианная фильтрация, на третьем этапе (шаг 11) происходит сравнение полученных результатов с пороговым значением и на четвертом этапе (шаг 12) происходит формирование сигнала срабатывания устройства (сигнала тревоги). Использование медианной фильтрации обеспечивает устранение нежелательных одиночных выбросов в массивах данных. При превышении максимальных значений тангенциальных и радиальных составляющих заданного порогового значения сигнальным процессором 6 принимается решение о нарушении человеком-нарушителем зоны обнаружения на участке, соответствующем номеру n гармоники дальности, где было обнаружено превышение. Сформированный сигнал срабатывания устройства (сигнал тревоги) с выхода сигнального процессора 6 поступает на вход исполнительного устройства (индикатора) 9, где отображается в виде тревожного светового (звукового) сигнала и фиксируется в виде замыкания (или размыкания) контактов реле. Одновременно сигнал срабатывания устройства (сигнал тревоги) поступает в модуль связи 8 для дальнейшей его передачи во внешние системы сбора и отображения информации (ССОИ) по одному из каналов связи (например, интерфейсу RS-485). Использование приведенных статистических методов обработки полезного сигнала позволяет повысить функциональную надежность устройства за счет ограничения зоны обнаружения устройства в дальней области и повышения помехоустойчивости по отношению к подвижным объектам, находящимся за границей зоны обнаружения устройства, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами. Ограничение по дальности обеспечивается выбором числа n обрабатываемых гармоник и формой АЧХ полосового фильтра 13. Повышению помехоустойчивости устройства также способствует форма АЧХ полосового фильтра 13, приведенная на фиг. 3 (эпюра 28). Нарастающий участок кривой 28 до верхнего максимума Fmax соответствует полосе пропускания устройства, где сосредоточены все n гармоник дальности. Резкий спад кривой 28 после точки перегиба обеспечивает снижение чувствительности устройства к объектам за зоной обнаружения устройства. В примере варианта воплощения устройства Fmax равна 92,8 кГц, а данному значению частоты соответствует расстояние, равное 25 м (40-я гармоника по дальности), которое определяет границу зоны обнаружения в дальней области. В качестве сигнального процессора 6 может быть использован быстродействующий процессор, обладающий возможностями производить операции с большими массивами чисел и выполнять параллельные вычисления. В примере варианта воплощения устройства применен процессор ADSP BF533 фирмы «Analog Devise».
Во втором варианте применения устройства в отличие от первого в модуле СВЧ 15 вместо двух раздельных антенн (передающей антенны 1 и приемной антенны 2) используется одна приемо-передающая антенна 36, а вместо ответвителя 10 используется циркулятор 35. Структурная схема модуля СВЧ 15, предназначенного для использования во втором варианте применения устройства, представлена на фиг. 6. Для отвода части энергии передаваемого сигнала в смеситель 3 применяется циркулятор 35, который подключен к приемо-передающей антенне 36. В остальном второй вариант применения устройства функционирует аналогично первому варианту.
Действующие лабораторные макеты первого и второго вариантов предлагаемого устройства подвергались всесезонным испытаниям в течение одного года. Была подтверждена устойчивая работоспособность действующих лабораторных макетов по обнаружению нарушителей с формированием сигналов тревоги в моменты перехода нарушителей через зоны обнаружения.
Введенные в известное устройство дополнительные признаки и функциональные связи позволяют придать предлагаемому устройству новые существенные свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| Универсальное радиолучевое устройство для тревожной сигнализации с пониженным энергопотреблением | 2018 |
|
RU2698770C1 |
| РАДИОЛУЧЕВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПЕРЕСЕЧЕНИЯ НАРУШИТЕЛЕМ РУБЕЖА ОХРАНЫ | 2015 |
|
RU2600432C1 |
| Устройство для тревожной сигнализации с сервоприводами передающего и приемного блоков | 2017 |
|
RU2665866C1 |
| Интеллектуальный радиолучевой датчик для тревожной сигнализации | 2015 |
|
RU2610549C1 |
| Устройство измерения составляющих вектора путевой скорости | 2019 |
|
RU2715740C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА (ВАРИАНТЫ) | 2015 |
|
RU2595979C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
Изобретение относится к области охранной сигнализации. Технический результат - повышение функциональной надежности за счет ограничения зоны обнаружения устройства в дальней области и повышения помехоустойчивости устройства по отношению к подвижным объектам, находящимся за границей зоны обнаружения устройства, а также к неподвижным объектам, расположенным как в зоне обнаружения, так и за ее пределами. Устройство состоит из соответствующим образом взаимосвязанных генератора колебаний, сигнального процессора, блока памяти, модуля связи, исполнительного устройства (индикатора), усилителя с АРУ, полосового фильтра, аналого-цифрового преобразователя (АЦП) и модуля СВЧ, содержащего передающую и приемную антенны (или приемо-передающую антенну), генератор, управляемый напряжением, ответвитель (или циркулятор), смеситель и усилитель частоты биений. 3 з.п. ф-лы, 6 ил.
1. Радиоволновое устройство для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний, содержащее генератор колебаний, сигнальный процессор, выполненный с возможностью вычисления функции быстрого преобразования Фурье (БПФ) для n-числа гармоник, блок памяти, модуль связи, исполнительное устройство (индикатор) и модуль СВЧ, содержащий передающую и приемную антенны, генератор, управляемый напряжением, и смеситель, выход генератора колебаний подключен ко входу модуля СВЧ, первый вход/выход сигнального процессора соединен со входом/выходом блока памяти, второй его вход/выход соединен со входом/выходом модуля связи, а первый выход соединен со входом исполнительного устройства (индикатора), отличающееся тем, что выход модуля СВЧ подключен к первому входу усилителя с АРУ, выход которого через последовательно соединенные полосовой фильтр и аналого-цифровой преобразователь (АЦП) подключен к входу сигнального процессора, второй выход которого подключен к второму входу усилителя с АРУ, а третий выход подключен к входу генератора колебаний.
2. Радиоволновое устройство для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний по п. 1, отличающееся тем, что в модуль СВЧ дополнительно введены ответвитель и усилитель частоты биений, выход которого является выходом модуля СВЧ, вход генератора, управляемого напряжением, является входом модуля СВЧ, а его выход подключен к входу ответвителя, первый выход которого подключен к передающей антенне, а второй его выход подключен к первому входу смесителя, второй вход которого подключен к приемной антенне, а его выход подключен к входу усилителя частоты биений.
3. Радиоволновое устройство для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний по п. 1, отличающееся тем, что сигнальный процессор выполнен с дополнительными возможностями регулирования коэффициента усиления усилителя с АРУ, сортировки обрабатываемых гармоник по тангенциальным и радиальным составляющим, вычисления математического ожидания и дисперсии амплитуд частотных отсчетов, обработки результатов вычислений матричным способом по выбранному числу из n-гармоник и принятия окончательного решения об обнаружении нарушителя с формированием сигнала срабатывания устройства (сигнала тревоги).
4. Радиоволновое устройство для тревожной сигнализации с непрерывным излучением частотно-модулированных колебаний по п. 1, отличающееся тем, что в модуль СВЧ дополнительно введены циркулятор и усилитель частоты биений, а вместо передающей и приемной антенн введена приемо-передающая антенна, выход усилителя частоты биений является выходом модуля СВЧ, вход генератора, управляемого напряжением, является входом модуля СВЧ, а его выход подключен к входу циркулятора и к первому входу смесителя, второй вход которого подключен к выходу циркулятора, вход/выход которого подключен к приемо-передающей антенне, выход смесителя подключен к входу усилителя частоты биений.
| US 6795012 B2, 21.09.2004 | |||
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1996 |
|
RU2124232C1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ МЕТКИ | 1992 |
|
RU2032223C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 1996 |
|
RU2130646C1 |
| RU 94039171 A1, 10.09.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| US 6674393 B2, 06.01.2004 | |||
| US 6593874 B2, 15.07.2003 | |||
| US 8339305 B2, 25.12.2012 | |||
| US 7576685 B2, 18.08.2009 | |||
| US 4551712 A1, 05.11.1985 | |||
| US 7612707 B2, 03.11.2009. | |||

