Изобретение относится к области охранной сигнализации, в частности к средствам тревожной сигнализации, предназначенным для обнаружения нарушителя, проникающего через зону обнаружения рубежа охраны и вызвавшего срабатывания средства тревожной сигнализации по факту преодоления нарушителем зоны обнаружения, создаваемой пассивной инфракрасной системой, во время пересечения нарушителем этого рубежа охраны. Отличительной особенностью изобретения является возможность формирования граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии. Данная особенность позволяет обеспечить использование предлагаемой системы в комплексе с малокадровыми системами видеонаблюдения (описанными в патентах RU №2504015 и RU №2517042), для работы которых необходимы сигналы о моментах вхождения нарушителя в зону обнаружения, пересечения им осевой линии зоны обнаружения и выхода из зоны обнаружения. Малокадровые системы видеонаблюдения на основе этих сигналов имеют возможность формирования кадров претревожной, тревожной и послетревожной видеоинформации для достоверной идентификации нарушителя, проникающего через рубеж охраны.
Общеизвестны пассивные инфракрасные датчики движения, которые обнаруживают изменения в инфракрасной зоне излучения (диапазон длин волн 8-14 мкм) за счет разницы температур между нарушителем (человеком) и окружающей его средой. Для того, чтобы контролировать большую область пространства, пассивные инфракрасные датчики снабжаются оптической системой, состоящей из линз и зеркал, с фокусированием отдельных секторов пространства на соответствующие детекторы инфракрасного излучения. В качестве детекторов инфракрасного излучения обычно используются пироэлектрические элементы, работающие на принципе пьезоэлектрического эффекта. Инфракрасное (ИК)-излучение вызывает изменение температуры и некоторую механическую деформацию, что приводит к перемещению электрического заряда и, соответственно, к формированию электрического сигнала в пироэлектрическом элементе.
Обычно устройства тревожной сигнализации пассивного инфракрасного принципа действия формируют двухзональные поля наблюдения, например, с коридорной формой зоны обнаружения. К таким устройствам, например, можно отнести изделия ИД-40, ИД-50, ИД-70 производства НПФ «Полисервис», г. С.-Петербург (см. каталог продукции «GSN Electronic Company Ltd.», 2014 г., www.gsncompany.com) и варианты изделия «Сплав L50» производства ООО «Журин Электроникс», www.zhurin.com, г. Пенза.
В этих системах отсутствует возможность формирования граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии.
Существует тенденция увеличения количества секторов зон наблюдения для наиболее полного и качественного определения наличия движущегося нарушителя через рубеж охраны. На рынке технических систем обнаружения присутствуют пассивные ИК-детекторы с тремя и четырьмя секторами зоны обнаружения.
К подобным системам можно отнести, например, пассивную инфракрасную систему обнаружения с трехэлементным, одноканальным, пироэлектрическим детектором «Passive infrared detection system with three-element, single-channel, pyroelectric detector», описанную в патенте US №4864136, МПК G01J 5/20, опубл. 1989 г. и содержащую оптическую систему (линзу) для фокусировки ИК-излучения, исходящего из наблюдаемого пространства, на одноканальный трехэлементный пироэлектрический детектор, усилитель-полосовой фильтр, компараторы, импульсный генератор, схему формирования интервала времени, интегратор, пороговую схему и формирователь сигнала тревоги. Детектор содержит три разнесенных пироэлектрических элемента, которые при взаимодействии с оптической системой обеспечивают зону обнаружения с тремя дискретными полями (секторами) обзора F1, F2 и F3. При прохождении нарушителя последовательно через поля F1, F2 и F3 на выходе детектора формируется сигнал, состоящий из нескольких импульсов. Такой сигнал содержит первый импульс первой полярности, второй импульс противоположной полярности и третий импульс той же полярности, что и первый. Этот сигнал усиливается, фильтруется, сравнивается с положительным и отрицательным порогами компаратора, что при последующей обработке приводит к срабатыванию системы обнаружения и формированию сигнала тревоги. Основным преимуществом этой системы является обеспечение большего количества импульсов в выходном сигнале по сравнению с обычными двухэлементными обнаружителями. Эта система может использоваться для обнаружения нарушителя вдоль узкого коридора, а также обеспечивать широкий охват в виде трех зон (секторов) детектирования.
Сходными существенными признаками заявленной и вышеупомянутой системы являются: оптическая система (линза) для фокусировки ИК-излучения, усилитель-полосовой фильтр, компараторы и формирователь сигнала тревоги.
Недостатком системы является отсутствие возможности определения моментов перехода нарушителя через границы широкой зоны обнаружения (при вхождении в зону обнаружения и при выходе за ее пределы), а также момента пересечения нарушителем ее осевой линии.
Известен инфракрасный датчик вторжений с множеством элементов обнаружения инфракрасных лучей «Infrared intrusion detector with a plurality of infrared ray detecting elements», описанный в патенте US №4912748, МПК G01J 5/18, G08B 13/18, опубл. 1990 г., содержащий оптическое средство для фокусирования ИК-лучей из зоны детектирования, которое включает в себя четыре разделенные области наблюдения, секцию инфракрасных детекторов, содержащую четыре пироэлектрических элемента по числу областей наблюдения, средства усиления сигналов, функционирующие независимо друг от друга, сигнальный процессор, включающий в свой состав полосовой фильтр, мультиплексор и аналого-цифровой преобразователь, дискриминирующее средство, выполненное на основе микрокомпьютера, и формирователь выходного сигнала обнаружения нарушителя.
Инфракрасный датчик вторжений обнаруживает нарушителя при его движении в зоне детектирования в любом направлении за счет анализа пиковых уровней сигналов, их формы и временных соотношений при сравнении сигналов друг с другом.
Сходными существенными признаками заявленной системы и вышеупомянутого датчика являются: оптическое средство для фокусирования ИК-лучей из зоны детектирования, которое включает в себя разделенные области наблюдения, пироэлектрические элементы по числу областей наблюдения, средства усиления, функционирующие независимо друг от друга, сигнальный процессор, полосовой фильтр и формирователь выходного сигнала обнаружения нарушителя (сигнала тревоги).
Недостатком датчика является отсутствие возможности определения признака пересечения нарушителем осевой линии и двух моментов его перехода через границы зоны обнаружения (при вхождении в зону обнаружения и при выходе за ее пределы). Другой недостаток заключается в том, что пироэлектрические элементы могут иметь разную чувствительность, что может привести к неправильному функционированию датчика по обнаружению нарушителя. Для устранения этого недостатка необходима процедура выравнивания чувствительности в областях наблюдения, например, с применением в средствах усиления сигналов усилителей с АРУ.
Известно устройство для обнаружения перемещения источника тепла «Apparatus for detecting movement of heat source», описанное в патенте US №5296707, МПК G01J 5/08, опубл. 1994 г. и содержащее сигнальный процессор и двухканальную сенсорную секцию, у которой в каждом канале размещены линза Френеля, инфракрасный датчик и усилитель. Сенсорная секция предназначена для приема ИК-лучей из двух боковых отдельных секторов зоны обнаружения, а также из сформированного сектора центральной зоны перекрытия. Таким образом, вся зона наблюдения разделяется на три сектора зоны обнаружения, изменения температуры в которых могут быть обнаружены двумя сенсорными системами. Сигналы с каждого канала сенсорной секции поступают на входы сигнального процессора, в котором осуществляется их обработка по обнаружению движения нарушителя между секторами зоны обнаружения. Нарушитель обнаруживается сначала в одном крайнем секторе зоны обнаружения, потом в центральном секторе зоны перекрытия и затем в другом крайнем секторе зоны обнаружения.
Сходными существенными признаками являются: сигнальный процессор, сенсорные секции с линзами Френеля, инфракрасными датчиками и усилителями, а также наличие боковых секторов зоны обнаружения и центрального сектора зоны перекрытия.
Недостатком устройства является недостаточная точность определения момента пересечения нарушителем центральной осевой линии зоны обнаружения и отсутствие возможности выравнивания чувствительности между отдельными секторами зоны обнаружения.
Известен пассивный инфракрасный датчик движения (варианты), описанный в патенте RU №2353006, МПК G11B 11/00, опубл. 2009 г., содержащий оптическую систему, систему пассивного инфракрасного (ПИК) детектора, контур (блок) обработки сигнала, систему обработки (процессор) и формирователь звуковой или визуальной тревоги. Система ПИК детектора включает в свой состав два детектора, состоящих из элементов различной конфигурации. Первый детектор контролирует первый сектор обзора пространства, второй детектор контролирует второй сектор обзора пространства, оптическая система при этом перекрывает первый и второй сектора обзора пространства, которые пересекаются между собой. Сигналы с детекторов объединяются для определения движения объекта и его размера, а полярность сигналов может быть использована для определения направления движения объекта. Система обработки по наличию или отсутствию двух различных частот распознает отличия между движущими объектами и не движущими источниками помех. Система обработки также использует эти сигналы в качестве информации о размере движущейся цели.
Сходными существенными признаками заявленной системы и вышеупомянутого датчика являются: оптическая система для обзора пересекающихся между собой первого и второго сектора пространства, первый и второй детекторы, система обработки (процессор), формирователь звуковой или визуальной тревоги.
Недостатком датчика является отсутствие возможности определения признака пересечения движущимся объектом осевой линии зоны обнаружения и двух моментов его перехода через границы зоны обнаружения (при вхождении в зону обнаружения и при выходе за ее пределы).
Все упомянутые недостатки частично устраняются в другом, наиболее близким по технической сущности к заявленному изобретению, известному пассивному инфракрасному прибору для обнаружения граничных переходов «Passive infrared device for detection of boundary crossings», описанному в патенте US №6881957, МПК G01J 5/00, опубл. 2005 г.
Прибор содержит: инфракрасный датчик (PIR) с первым и вторым пироэлектрическими элементами, оптическую систему, усилитель, совмещенный с полосовым фильтром, компаратор, процессор, источник опорного напряжения, детектор разряда батареи и ВЧ-передатчик (радиомодем). Инфракрасный датчик оснащен оптической системой, которая формирует два смещенных в пространстве друг относительно друга сектора зоны обнаружения и обеспечивает узкое поле зрения. В качестве оптической системы используется линза Френеля. Первый и второй пироэлектрические элементы формируют сигналы с двумя перепадами напряжения противоположенной полярности, причем первый пироэлектрический элемент расположен в фокусе первого сектора зоны обнаружения и формирует положительный сигнал при обнаружении изменения ИК-излучения в этом секторе, а второй пироэлектрический элемент расположен в фокусе второго сектора зоны обнаружения и формирует отрицательный сигнал при обнаружении изменения ИК-излучения в соответствующим секторе. Положительный и отрицательный сигналы объединяются для обеспечения выходного сигнала инфракрасного датчика. Последовательно соединенные инфракрасный датчик, полосовой фильтр, усилитель и компаратор образуют канал аналоговой обработки сигнала. Компаратор имеет два выхода превышения и понижения пороговых значений (положительного и отрицательного), которые подключены к входам процессора. Алгоритм функционирования процессора выполнен с возможностью определения момента пересечения исходным сигналом нулевого уровня на основе анализа соотношений временных параметров импульсов с выходов компаратора, что является признаком пересечения граничной или осевой линии зоны обнаружения. При необходимости признак пересечения границы (осевой линии) может быть передан с помощью ВЧ-передатчика (радиомодема) на центральный (внешний) контроллер или другое устройство по радиоканалу связи.
Общими существенными признаками с заявляемым решением являются: оптическая система, формирующая первый и второй секторы зоны обнаружения, смещенные в пространстве друг относительно друга, инфракрасный датчик (PIR) с первым и вторым пироэлектрическими элементами, полосовой фильтр и усилитель, компаратор, процессор, а также возможность передачи полученной информации с помощью ВЧ-передатчика (радиомодема) на центральный (внешний) контроллер или другое устройство.
Недостатком прибора является отсутствие возможности определения дополнительно к признаку пересечения нарушителем осевой линии еще двух моментов его перехода через границы зоны обнаружения (при вхождении в зону обнаружения и при выходе за ее пределы). Другой недостаток заключается в том, что первый и второй пироэлектрические элементы могут иметь разную чувствительность, что может привести к искажению суммарного сигнала и ошибочному определению граничных переходов. Поэтому необходима процедура выравнивания чувствительности в первом и втором секторах зоны обнаружения, например, с помощью применения усилителей с АРУ.
Целью настоящего изобретения является получение возможности обнаружения пассивной инфракрасной системой нарушителя с формированием граничных сигналов в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии.
Для достижения этой цели в известное техническое решение введены новые существенные признаки, функциональные элементы и связи, которые позволяют обнаружить пассивной инфракрасной системой нарушителя и сформировать граничные сигналы в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии.
Эта цель достигнута в предложенном варианте инфракрасной пассивной системы для обнаружения нарушителя с формированием граничных сигналов, которая содержит оптическую систему, формирующую первый и второй боковые расходящиеся секторы зоны обнаружения, смещенные в пространстве друг относительно друга, первый центральный инфракрасный датчик с первым и вторым пироэлектрическими элементами, выходы которых объединены и которые выполнены с возможностью формирования первого сигнала с двумя перепадами напряжения противоположной полярности, первый канал аналоговой обработки первого сигнала, в состав которого входят последовательно соединенные первый полосовой фильтр, первый усилитель и первый компаратор, выход первого инфракрасного датчика соединен в первым входом первого канала аналоговой обработки первого сигнала, первый и второй выходы первого компаратора являются первым и вторым выходами первого канала аналоговой обработки первого сигнала и подключены к первому и второму входам процессора, который выполнен с возможностью формирования граничного сигнала в момент пересечения нарушителем осевой линии зоны обнаружения по результатам анализа первого сигнала, в нее дополнительно введены: второй боковой инфракрасный датчик с третьим и четвертым пироэлектрическими элементами, выходы которых объединены и которые выполнены с возможностью формирования второго сигнала с двумя перепадами напряжения противоположной полярности; третий боковой инфракрасный датчик с пятым и шестым пироэлектрическими элементами, выходы которых объединены и которые выполнены с возможностью формирования третьего сигнала с двумя перепадами напряжения противоположной полярности; второй канал аналоговой обработки второго сигнала, в состав которого входят последовательно соединенные второй полосовой фильтр, второй усилитель и второй компаратор, выход второго бокового инфракрасного датчика соединен с входом второго канала аналоговой обработки второго сигнала, первый и второй выходы второго компаратора являются первым и вторым выходами второго канала аналоговой обработки второго сигнала и подключены к третьему и четвертому входам процессора; третий канал аналоговой обработки третьего сигнала, в состав которого входят последовательно соединенные третий полосовой фильтр, третий усилитель и третий компаратор, выход третьего бокового инфракрасного датчика соединен с входом третьего канала аналоговой обработки третьего сигнала, первый и второй выходы третьего компаратора являются первым и вторым выходами третьего канала аналоговой обработки третьего сигнала и подключены к пятому и шестому входам процессора; оптическая система дополнительно формирует третий центральный расходящийся сектор зоны обнаружения с фокусировкой его на оптический вход первого центрального инфракрасного датчика; первый боковой сектор зоны обнаружения сфокусирован на оптический вход второго бокового инфракрасного датчика; второй боковой сектор зоны обнаружения сфокусирован на оптический вход третьего бокового инфракрасного датчика; процессор выполнен с возможностью дополнительного формирования сигнала тревоги и граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения по результатам анализа первого, второго и третьего сигналов, первый, второй и третий выходы процессора подключены, соответственно, к вторым входам первого, второго и третьего усилителя в соответствующих каналах аналоговой обработки сигналов; четвертый, пятый, шестой и седьмой выходы процессора являются, соответственно, выходом сигнала тревоги и выходами граничных сигналов в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии. Оптическая система выполнена с возможностью использования оптических линз или линз Френеля или зеркальной оптики или с возможностью их комбинирования. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов выполнена с возможностью передачи сигнала тревоги и граничных сигналов в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии на центральный (внешний) контроллер или другое устройство с помощью ВЧ-передатчика (радиомодема).
Сущность изобретения поясняется фиг. 1-3, на которых изображено следующее.
На фиг. 1 приведена структурная схема инфракрасной пассивной системы для обнаружения нарушителя с формированием граничных сигналов, где введены обозначения: оптическая система - 1, первый боковой расходящийся сектор зоны обнаружения - 2, второй боковой расходящийся сектор зоны обнаружения - 3, третий центральный расходящийся сектор зоны обнаружения - 4, первый центральный инфракрасный датчик - 5, второй боковой инфракрасный датчик - 6, третий боковой инфракрасный датчик - 7, первый канал аналоговой обработки первого сигнала - 8, второй канал аналоговой обработки второго сигнала - 9, третий канал аналоговой обработки третьего сигнала - 10, процессор - 11, осевая линия зоны обнаружения - 12, нарушитель - 13. Нарушитель 13 пересекает зону обнаружения, состоящую из секторов 2, 4 и 3 слева направо (вид сверху).
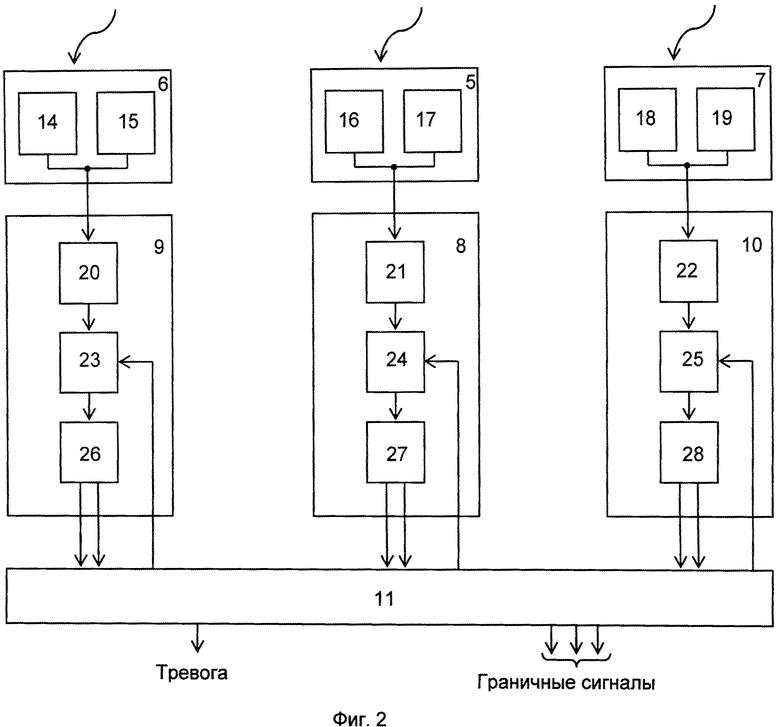
На фиг. 2 приведен состав первого центрального 5, второго 6 и третьего 7 боковых инфракрасных датчиков, а также состав первого 8, второго 9 и третьего 10 каналов аналоговой обработки сигналов. На фиг. 2 введены обозначения: первый - 14, второй - 15, третий - 16, четвертый - 17, пятый - 18 и шестой - 19 пироэлектрические элементы; первый - 20, второй - 21 и третий - 22 полосовые фильтры; первый - 23, второй - 24 и третий - 25 усилители; первый - 26, второй - 27 и третий - 28 компараторы.
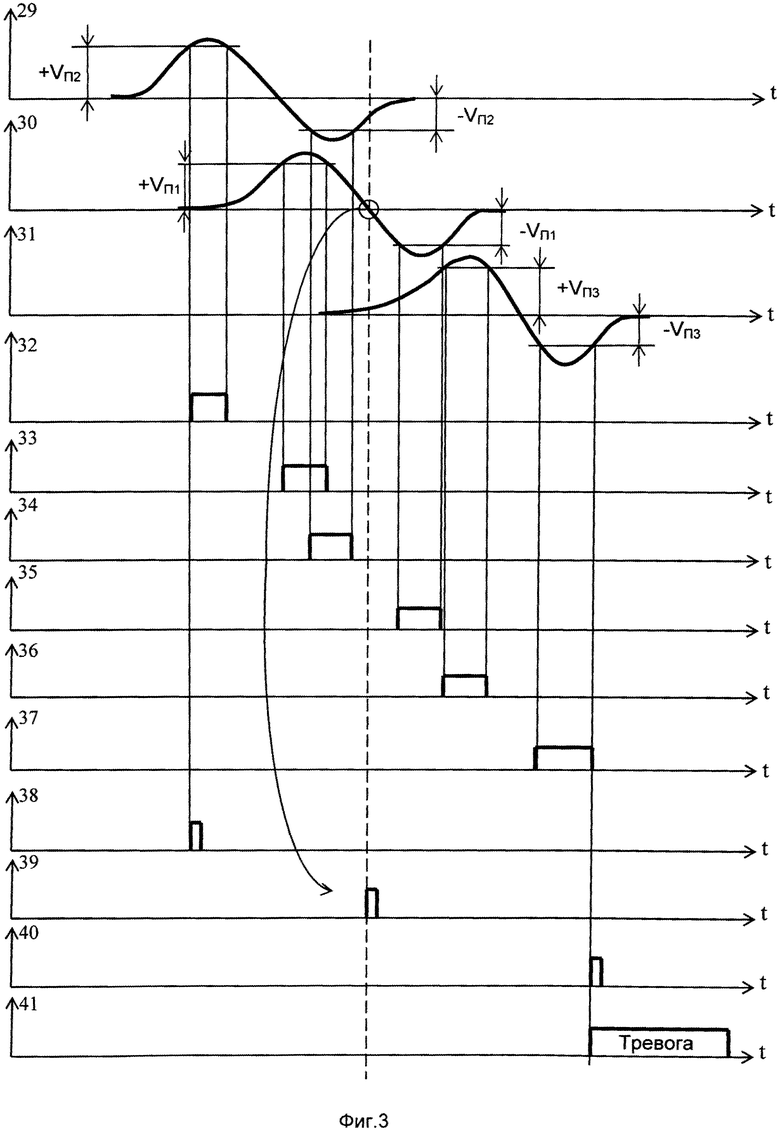
На фиг. 3 приведены для примера временные диаграммы (эпюры) работы предложенной системы. На фиг. 3 введены обозначения: эпюра второго сигнала с выхода второго усилителя 24 второго канала аналоговой обработки второго сигнала - 29, эпюра первого сигнала с выхода первого усилителя 23 первого канала аналоговой обработки первого сигнала - 30, эпюра третьего сигнала с выхода третьего усилителя 25 третьего канала аналоговой обработки третьего сигнала - 31, импульс логического уровня с первого выхода второго компаратора 27 (порог +VП2) второго канала аналоговой обработки второго сигнала - 32, импульс логического уровня с первого выхода первого компаратора 26 (порог +VП1) первого канала аналоговой обработки первого сигнала - 33, импульс логического уровня со второго выхода второго компаратора 27 (порог -VП2) второго канала аналоговой обработки второго сигнала - 34, импульс логического уровня со второго выхода первого компаратора 26 (порог -VП1) первого канала аналоговой обработки первого сигнала - 35, импульс логического уровня с первого выхода третьего компаратора 28 (порог +VП3) третьего канала аналоговой обработки третьего сигнала - 36, импульс логического уровня со второго выхода третьего компаратора 28 (порог-VП3) третьего канала аналоговой обработки третьего сигнала - 37, граничный сигнал в момент перехода нарушителя через границу зоны обнаружения (при входе в нее) - 38, граничный сигнал в момент пересечения нарушителем осевой линии зоны обнаружения - 39, граничный сигнал в момент перехода нарушителя через границу зоны обнаружения (при выходе из нее) - 40, сигнал тревоги - 41.
Фиг. 3 поясняет принцип работы предложенной системы. Временное расположение сигналов и импульсов приведено в соответствии с последовательностью пересечения нарушителем 13 секторов 2, 4 и 3 зоны обнаружения. Символами +VП1, -VП1, +VП2, -VП2, +VП3 и -VП3 обозначены пороговые значения для указанных на фиг. 2 компараторов.
Предложенная система работает следующим образом.
Оптическая система 1 формирует три расходящихся сектора зоны обнаружения, смещенных в пространстве друг относительно друга: первый боковой расходящийся сектор зоны обнаружения 2, второй боковой расходящийся сектор зоны обнаружения 3 и третий центральный расходящийся сектор зоны обнаружения 4. Каждый из этих расходящихся секторов зоны обнаружения сфокусирован с помощью оптической системы 1 на оптический вход одного из трех инфракрасных датчиков: первый боковой расходящийся сектор зоны обнаружения 2 сфокусирован на оптический вход второго бокового инфракрасного датчика 6, второй боковой расходящийся сектор зоны обнаружения 3 сфокусирован на оптический вход третьего бокового инфракрасного датчика 7 и третий центральный расходящийся сектор зоны обнаружения 4 сфокусирован на оптический вход первого центрального инфракрасного датчика 5.
Осевая линия зоны обнаружения 12 совпадает с центральной (осевой) линией рубежа охраны и обозначена на фиг. 1 штриховой линией. Нарушитель 13 при преодолении рубежа охраны последовательно пересекает зону обнаружения предлагаемой системы, состоящую из секторов 2, 4 и 3, например, слева направо (как показано на фиг. 1). При этом в инфракрасных датчиках 6, 5 и 7 последовательно формируются сигналы пересечения нарушителем 13 соответствующих секторов зоны обнаружения. Каждый из инфракрасных датчиков 6, 5 и 7 содержит пару пироэлектрических элементов, выходы которых объединены (см. фиг. 2). Второй боковой инфракрасный датчик 6 содержит третий 16 и четвертый 17 пироэлектрические элементы. Первый центральный инфракрасный датчик 5 содержит первый 14 и второй 15 пироэлектрические элементы. Третий боковой инфракрасный датчик 7 содержит пятый 18 и шестой 19 пироэлектрические элементы. Каждая пара из указанных пироэлектрических элементов выполнена с возможностью формирования сигнала с двумя перепадами напряжения противоположной полярности. Таким образом, при пересечении нарушителем 13 зоны обнаружения последовательно слева направо (см. фиг. 1) будут сформированы следующие сигналы с двумя перепадами напряжения противоположной полярности: второй сигнал с выхода второго бокового инфракрасного датчика 6, первый сигнал с выхода первого центрального инфракрасного датчика 5 и третий сигнал с выхода третьего бокового инфракрасного датчика 7. При этом второй, первый и третий сигналы будут сдвинуты последовательно во времени друг относительно друга. Каждый из выходов инфракрасных датчиков 6,5 и 7 подключен, соответственно, ко второму 9, первому 8 и третьему 10 каналам аналоговой обработки второго, первого и третьего сигналов. В свою очередь, каждый из каналов аналоговой обработки второго 9, первого 8 и третьего 10 сигналов содержат три последовательно соединенных элемента: полосовой фильтр, усилитель и компаратор. Причем, второй канал аналоговой обработки второго сигнала 9 содержит второй полосовой фильтр 21, второй усилитель 24 и второй компаратор 27. Первый канал аналоговой обработки первого сигнала 8 содержит первый полосовой фильтр 20, первый усилитель 23 и первый компаратор 26. Третий канал аналоговой обработки третьего сигнала 10 содержит третий полосовой фильтр 22, третий усилитель 25 и третий компаратор 28. Все три канала аналоговой обработки сигналов выполнены по аналогичным схемотехническим решениям. Второй 21, первый 20 и третий 22 полосовые фильтры предназначены для ограничения полосы пропускания полезного инфракрасного сигнала с целью обеспечения помехоустойчивости к нежелательным шумам и солнечным «засветкам». Второй 24, первый 23 и третий 25 усилители предназначены для усиления полезного сигнала.
Отличительной особенностью этих усилителей от прототипа является то, что они имеют дополнительные входы управления коэффициентами усиления и являются усилителями с автоматической регулировкой усиления (АРУ). Это связано с тем, что чувствительность секторов 2, 4 и 3 зоны обнаружения может быть различной (например, от неравномерного затенения или нагрева контролируемой области пространства) и поэтому для правильной работы системы необходимо выравнивание их чувствительности соответствующими усилителями. Учитывая, что предлагаемая система является пассивной, усилители 24, 23 и 25 могут быть выполнены с АРУ по анализу уровня шума. При преодолении нарушителем 13 последовательно секторов 2, 4 и 3 зоны обнаружения (как показано на фиг. 1) в соответствующих втором 9, первом 8 и третьем 10 каналах аналоговой обработки сигналов будут сформированы второй, первый и третий сигналы, сдвинутые по времени друг относительно друга (см. фиг. 3). Форма второго сигнала с выхода второго усилителя 24 второго канала аналоговой обработки второго сигнала представлена на эпюре 29 (фиг. 3). Форма первого сигнала с выхода первого усилителя 23 первого канала аналоговой обработки первого сигнала представлена на эпюре 30 (фиг. 3). Форма третьего сигнала с выхода третьего усилителя 25 третьего канала аналоговой обработки третьего сигнала представлена на эпюре 31 (фиг. 3). Эти три сигнала поступают раздельно на входы трех компараторов. Каждый второй 27, первый 26 и третий 28 компараторы в соответствующих втором 9, первом 8 и третьем 10 каналах обработки второго, первого и третьего сигналов имеют по два выхода превышения и понижения уровня входного сигнала (первый и второй выходы), соответственно, для положительной и отрицательной его полярности. На выходах компараторов формируются импульсы логического уровня (эпюры 32, 33, 34, 35, 36 и 37 на фиг. 3), которые возникают в результате сравнения входных сигналов с соответствующими пороговыми уровнями +VП2, +VП1, -VП2, -VП1, +VП3 и -VП3. Эти шесть импульсов сдвинуты по времени друг относительно друга и отражают процесс последовательного преодоления нарушителем 13 секторов 2, 4 и 3 зоны обнаружения.
В данном рассмотренном случае все эти импульсы будут присутствовать на соответствующих выходах второго 27, первого 26 и третьего 28 компараторов. В зависимости от разницы температур фона окружающего пространства и тела нарушителя полярность сигналов 29, 30 и 31 может быть изменена на обратную, и в этом случае последовательность возникновения импульсов на выходах каждого компаратора будет также изменена на обратную (вместо последовательности возникновения импульсов сначала на первых, затем на вторых выходах, импульсы будут возникать сначала на вторых, а затем на первых выходах). В общем случае, все шесть импульсов с выходов компараторов поступают на соответствующие третий и четвертый, первый и второй, пятый и шестой входы процессора 11 для дальнейшей процедуры обнаружения нарушителя и формирования граничных сигналов. Процессор 11 выполнен с возможностью формирования сигнала тревоги и граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии.
Работа процессора 11 заключается в следующем. На примере, приведенном на фиг. 3, по переднему фронту импульса с первого выхода второго компаратора 27 (эпюра 32 на фиг. 3) процессор 11 инициирует начало процедуры обработки входных импульсов и формирует короткий импульс (эпюра 38 на фиг. 3), который является граничным сигналом в момент перехода нарушителя через границу зоны обнаружения (при входе в нее). Далее процессор 11 определяет момент пересечения первым сигналом (эпюра 30 на фиг. 3) нулевого уровня на основе анализа соотношений временных параметров импульсов с выходов компаратора, что является признаком пересечения граничной или осевой линии зоны обнаружения. По результатам анализа процессор 11 формирует граничный сигнал 39 (фиг. 3) в момент пересечения нарушителем осевой линии зоны обнаружения. Принцип определения момента пересечения сигналом нулевого уровня известен и описан, например, в патенте US №6881957, МПК G01J 5/00, опубл. 2005 г., являющемся прототипом предлагаемой системы. Далее, по заднему фронту последнего шестого импульса со второго выхода третьего компаратора 28 (эпюра 37 на фиг. 3) процессор 11 формирует короткий импульс (эпюра 40 на фиг. 3), который является граничным сигналом в момент перехода нарушителя через границу зоны обнаружения (при выходе из нее).
По результатам анализа количества поступающих на входы процессора импульсов с выходов компараторов с момента начала процедуры обработки (их должно быть шесть) и анализа соотношений их временных параметров (длительности импульсов, например, не должны отличаться друг от друга более чем в четыре раза), процессор 11 формирует сигнал тревоги (эпюра 41 на фиг. 3), что свидетельствует об обнаружении нарушителя. По заднему фронту сигнала тревоги процедура обработки входных импульсов считается завершенной. Первый, второй и третий выходы процессора 11 подключены, соответственно, ко вторым входам первого, второго и третьего усилителя в соответствующих каналах аналоговой обработки сигналов для управления их коэффициентами усиления. Четвертый, пятый, шестой и седьмой выходы процессора 11 являются, соответственно, выходом сигнала тревоги и выходами граничных сигналов.
При преодолении нарушителем 13 секторов 3, 4 и 2 зоны обнаружения справа налево последовательность возникновения сигналов 29, 30 и 31 (фиг. 3) изменится с указанной на обратную. Сначала возникнет сигнал 31, затем сигнал 30 и завершит последовательность сигнал 29. При этом последовательность возникновения импульсов на выходах компараторов также изменится. Последовательность обработки импульсов процессором 11 также будет изменена при сохранении конечного результата.
В общем случае, алгоритм функционирования процессора 11 выполнен с возможностью реализации следующих процедур:
1. Выравнивание чувствительности в первом, втором и третьем секторах зоны обнаружения (в начале работы, при включении питания, при сезонных подстройках).
2. Формирование граничного сигнала в момент перехода нарушителя через границу зоны обнаружения (при входе в нее) по переднему фронту первого пришедшего импульса от второго (+VП2 или -VП2) или третьего (+VП3 или -VП3) компараторов. Открытие «окна» анализа.
3. Определение момента пересечения первым сигналом нулевого уровня на основе анализа соотношений временных параметров импульсов с выходов компаратора, что является признаком пересечения граничной или осевой линии зоны обнаружения. Формирование соответствующего сигнала.
4. Формирование граничного сигнала в момент перехода нарушителя через границу зоны обнаружения (при выходе из нее) по заднему фронту последнего (шестого) пришедшего импульса от второго (+VП2 или -VП2) или третьего (+VП3 или -VП3) компараторов. Закрытие «окна» анализа.
5. Подсчет импульсов с выходов компараторов в «окне» анализа и проверка соотношения их временных параметров. При выполнении этих условий - формирование сигнала тревоги.
Выравнивание чувствительности в первом, втором и третьем секторах зоны обнаружения может быть выполнено в качестве примера следующим образом. В каждом канале аналоговой обработки сигналов процессор 11 увеличивает коэффициенты усиления соответствующих усилителей до того момента, когда на выходах компараторов будут присутствовать непрерывные сигналы, что свидетельствует о максимальном значении уровня шума в аналоговых трактах. Далее, процессор 11 в каждом канале уменьшает в разы коэффициенты усиления соответствующих усилителей (например, в 10 раз), обеспечивая тем самым необходимое соотношение сигнал/шум. Проверку правильности функционирования системы по обнаружению нарушителя при этом можно выполнить с помощью пробных проходов через сектора зоны обнаружения.
Оптическая система 1 может быть выполнена разными способами: с возможностью использования оптических линз, или линз Френеля, или зеркальной оптики, а также с возможностью их комбинирования.
Предлагаемая система также может быть выполнена с возможностью передачи сигнала тревоги и граничных сигналов в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии на центральный (внешний) контроллер или другое устройство с помощью ВЧ-передатчика (радиомодема).
Действующий лабораторный макет предлагаемой системы подвергался всесезонным испытаниям в течение одного года. Была подтверждена устойчивая работоспособность действующего лабораторного макета по обнаружению нарушителя с формированием сигнала тревоги и граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии.
Введенные в известную систему дополнительные признаки и функциональные связи позволяют придать предлагаемой системе новые существенные свойства и расширить область применения системы (например, для использования предлагаемой системы в комплексе с малокадровыми системами видеонаблюдения, описанными в патентах RU №2504015 и RU №2517042) для повышения функциональной надежности охранной сигнализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пассивное инфракрасное устройство для обнаружения нарушителя с формированием граничных сигналов | 2017 |
|
RU2661751C1 |
| Интеллектуальное пассивное инфракрасное средство обнаружения | 2016 |
|
RU2629146C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| Интеллектуальный радиолучевой датчик для тревожной сигнализации | 2015 |
|
RU2610549C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
| Интеллектуальная сеть технических средств обнаружения с возможностью функционирования в среде big data для контроля периметров и территорий объектов | 2018 |
|
RU2682013C1 |
| ВИБРОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2541129C2 |
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| Комбинированная двухрубежная система охраны периметров объектов | 2018 |
|
RU2683186C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
Изобретение относится к области охранной сигнализации, в частности к средствам тревожной сигнализации, предназначенным для обнаружения нарушителя, во время пересечения нарушителем рубежа охраны. Технический результат - формирование сигнала тревоги и граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии, а также повышение функциональной надежности охранной сигнализации. Пассивная инфракрасная система состоит из оптической системы, формирующей три расходящихся сектора зоны обнаружения, смещенных в пространстве друг относительно друга, трех инфракрасных датчиков, трех каналов аналоговой обработки сигналов и процессора. Каждый инфракрасный датчик содержит пару пироэлектрических элементов, которые выполнены с возможностью формирования сигналов с двумя перепадами напряжения противоположной полярности. Каждый канал аналоговой обработки сигнала содержит полосовой фильтр, усилитель и компаратор. 5 з.п. ф-лы, 3 ил.
1. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов, содержащая оптическую систему, формирующую первый и второй боковые расходящиеся секторы зоны обнаружения, смещенные в пространстве друг относительно друга, первый центральный инфракрасный датчик с первым и вторым пироэлектрическими элементами, выходы которых объединены и которые выполнены с возможностью формирования первого сигнала с двумя перепадами напряжения противоположной полярности, первый канал аналоговой обработки первого сигнала, в состав которого входят последовательно соединенные первый полосовой фильтр, первый усилитель и первый компаратор, выход первого инфракрасного датчика соединен с первым входом первого канала аналоговой обработки первого сигнала, первый и второй выходы первого компаратора являются первым и вторым выходами первого канала аналоговой обработки первого сигнала и подключены к первому и второму входам процессора, который выполнен с возможностью формирования граничного сигнала в момент пересечения нарушителем осевой линии зоны обнаружения по результатам анализа первого сигнала, отличающаяся тем, что в нее дополнительно введены: второй боковой инфракрасный датчик с третьим и четвертым пироэлектрическими элементами, выходы которых объединены и которые выполнены с возможностью формирования второго сигнала с двумя перепадами напряжения противоположной полярности; третий боковой инфракрасный датчик с пятым и шестым пироэлектрическими элементами, выходы которых объединены и которые выполнены с возможностью формирования третьего сигнала с двумя перепадами напряжения противоположной полярности; второй канал аналоговой обработки второго сигнала, в состав которого входят последовательно соединенные второй полосовой фильтр, второй усилитель и второй компаратор, выход второго бокового инфракрасного датчика соединен с входом второго канала аналоговой обработки второго сигнала, первый и второй выходы второго компаратора являются первым и вторым выходами второго канала аналоговой обработки второго сигнала и подключены к третьему и четвертому входам процессора; третий канал аналоговой обработки третьего сигнала, в состав которого входят последовательно соединенные третий полосовой фильтр, третий усилитель и третий компаратор, выход третьего бокового инфракрасного датчика соединен с входом третьего канала аналоговой обработки третьего сигнала, первый и второй выходы третьего компаратора являются первым и вторым выходами третьего канала аналоговой обработки третьего сигнала и подключены к пятому и шестому входам процессора; оптическая система дополнительно формирует третий центральный расходящийся сектор зоны обнаружения с фокусировкой его на оптический вход первого центрального инфракрасного датчика; первый боковой сектор зоны обнаружения сфокусирован на оптический вход второго бокового инфракрасного датчика; второй боковой сектор зоны обнаружения сфокусирован на оптический вход третьего бокового инфракрасного датчика; процессор выполнен с возможностью дополнительного формирования сигнала тревоги и граничных сигналов в моменты перехода нарушителя через границы зоны обнаружения по результатам анализа первого, второго и третьего сигналов, первый, второй и третий выходы процессора подключены, соответственно, к вторым входам первого, второго и третьего усилителя в соответствующих каналах аналоговой обработки сигналов; четвертый, пятый, шестой и седьмой выходы процессора являются, соответственно, выходом сигнала тревоги и выходами граничных сигналов в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии.
2. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов по п. 1, отличающаяся тем, что оптическая система выполнена с возможностью использования оптических линз.
3. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов по п. 1, отличающаяся тем, что оптическая система выполнена с возможностью использования линз Френеля.
4. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов по п. 1, отличающаяся тем, что оптическая система выполнена с возможностью использования зеркальной оптики.
5. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов по п. 1, отличающаяся тем, что оптическая система выполнена с возможностью комбинирования оптических линз, линз Френеля и зеркальной оптики.
6. Пассивная инфракрасная система для обнаружения нарушителя с формированием граничных сигналов по п. 1, отличающаяся тем, что она выполнена с возможностью передачи сигнала тревоги и граничных сигналов в момент перехода нарушителя через границы зоны обнаружения и пересечения им ее осевой линии на центральный (внешний) контроллер или другое устройство с помощью ВЧ-передатчика (радиомодема).
| US 6881957 B2, 19.04.2005 | |||
| US2007182554 A1, 09.08.2007 | |||
| ПАССИВНЫЙ ИНФРАКРАСНЫЙ ДАТЧИК ДВИЖЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2353006C2 |

