Область техники, к которой относится изобретение
Настоящее изобретение в целом относится, согласно первому объекту, к способу определения того, действительно ли сферический элемент столкнулся с компонентом игрового поля или расположен на нем или вблизи него, путем выполнения приблизительного определения местоположения и уточненного определения местоположения, включающего в себя в ответ на приблизительное определение местоположения автоматический выбор одного или нескольких контрольных изображений, и более конкретно, к способу, согласно которому приблизительное определение местоположения выполняется системой, которая может распознавать, действительно ли обнаруженный объект является сферическим элементом.
Предпочтительное применение изобретения относится к определению того, отскочил ли сферический элемент внутри или за пределами игровой зоны.
Второй объект изобретения касается системы, пригодной для осуществления способа согласно первому объекту.
Изобретение предпочтительно относится к теннисному матчу, где игровые зоны являются различными прямоугольными зонами теннисного корта, сферический элемент представляет собой теннисный мяч, и, в соответствии с правилами, считается, что мяч отскакивает в игровой зоне, если он касается любой из линий периметра, которые обозначают границы данной зоны.
Изобретение также относится к подготовке теннисных игроков, с тем, чтобы улучшить точность их ударов, путем размещения мишеней, от которых мяч должен отскакивать после удара.
Уровень техники
При игре в теннис множество мячей с такой скоростью отскакивает на линиях, обозначающих границы различных игровых зон корта, т.е. «внутри» или «вне» корта или зоны подачи, так что человеческий глаз не в состоянии следовать за ними, и они не оставляют следов, что становится источником проблем.
Существуют многочисленные предложения, целью которых является определение того, отскочил ли сферический элемент, в частности, теннисный мяч, внутри или снаружи игровой зоны.
Самое известное предложение, в связи с его использованием в официальных теннисных матчах, реализовано системой, известной как «ястребиный глаз», в которой воспроизводится моделирование траектории мяча, зафиксированной дорогостоящими высокоскоростными камерами, и что позволяет увидеть, если мяч находится «внутри» или «вне», в теории с точностью до 3 мм.
Это система имеет много недостатков: она очень дорога (16 очень дорогостоящих камер), она требует других людей, чтобы просмотреть изображения и выбрать правильные, и, кроме того, моделирование траектории имеет статистическую величину погрешности в 3 мм, по поводу которой многие люди считают, что на самом деле она больше этой величины. Игрок видит не реальное изображение, а «акт веры», так как изображения смоделированы.
Есть также предложения, где анализируются не смоделированные, а реальные изображения. Некоторые патентные документы, относящиеся к таким предложениям, приведены ниже
Патент US 8199199 В1 обеспечивает способ и систему для регистрации в режиме реального времени положения теннисного мяча относительно граничных линий игровых зон на теннисном корте, с фиксацией изображений корта с помощью, по меньшей мере, одной видео камеры, чувствительной к ближнему инфракрасному излучению, и подсветки корта с помощью ближнего инфракрасного излучения от источника света, смещенного относительно видеокамеры, для того, чтобы определить траектории теннисного мяча и его тень, определяя точку пересечения и сравнив положение с ранее калиброванными граничными линиями корта, как способ определения того, отскакивает теннисный мяч внутри или вне игровой зоны.
Система, предложенная в упомянутом патенте, является чрезмерно сложной, поскольку она должна выполнять обнаружение и отслеживание двух движущихся элементов, мяча и его тени, и хотя фильтрация зафиксированного изображения предложена, чтобы избежать путаницы этих двух элементов с другими подвижными элементами, присутствующими в поле зрения видеокамеры, результаты этой фильтрации сомнительны, особенно в связи с тенями других объектов, которые могут смешиваться с тенью мяча.
Кроме того, эффективность реализации такой системы также весьма сомнительна, поскольку, особенно в отношении тени мяча, она будет варьироваться в зависимости от точек расположения видеокамеры или видеокамер, а также источника света, и для того, чтобы определение было четким, видеокамера должна быть расположена на определенной высоте, и при этом трудно гарантировать, что в точке пересечения мяча и его тени, мяч реально вступил в контакт с кортом или, даже если это так, что он коснулся корта именно в этой точке.
Из международной заявки WO 2007098537 A1 известны способ и система, которые включают, соответственно, признаки преамбулы независимых пунктов формулы изобретения настоящего изобретения. Способ и система, предложенная в WO 2007098537 A1, имеют целью определить параметры контакта между телами, например, отскок сферического элемента на игровом поле, посредством выполнения приблизительного определения местоположения, включающего в себя обнаружение локализованных инфракрасных излучений вследствие тепла от трения между телами, или деформацию, по меньшей мере, одно из тел, а также автоматический выбор и последующее отображение изображения или изображений, связанных с этим приблизительным определением местоположения, в том числе сведений о месте, где произошел это возможный контакт, в поле инфракрасного излучения, предпочтительно также в видимой области, чтобы обеспечить визуальный просмотр, и определить, например, отскочил ли сферический элемент внутри или снаружи игровой зоны
Система, используемая для выполнения вышеупомянутого приблизительного определения местоположения в WO 2007098537 A1, т.е. обнаружения инфракрасного излучения, очень неэффективна, так как инфракрасное излучение может возникнуть из-за различных нежелательных причин, отличных от контакта между телами, т.е. таких, которые не связаны, например, с контактом между сферическим элементом и спортивным кортом. Такие причины могут быть разнообразными, начиная от контакта, вызванного телом, которое не представляет интереса, таким как лист, падающий на корт, или сам игрок, движущийся через него, до внезапных изменений температуры в вызывающей интерес зоне, например в связи с наличием освещенных солнцем областей и тени в них, или потому, что теннисный корт представляет собой открытый корт, подвергающийся воздействию высоких температур.
Более ранняя и менее эффективная система обнаружения, чем те, которые упомянуты выше, и которая не основана на изображениях, описана в патенте GB 2292218, в котором предлагается способ и устройство для оценки того, отскочил ли теннисный мяч от линии, используя массив фотодетекторов, на которых функционирует единый коллимированный лазерный луч, обнаруживая присутствие и траекторию мяча в соответствии с фотодетекторами, перед которыми проходит мяч, т.е. система, которая может рассматриваться в качестве альтернативы системе получения изображения, предложенной в WO 2007098537 A1, и которая очевидно проигрывает последней в плане эффективности обнаружения.
В патенте GB 2292218 не описано или даже нет намека на то, что обнаруживаемый объект может быть не теннисным мячом, поэтому никакого решения не предлагается для этой проблемы, полностью игнорируемой GB 2292218: ни системы приблизительного определения местоположения, предложенной WO 2007098537 A1, ни какого-либо другого вида вспомогательного механизма к системе фото-обнаружения. Следует отметить, что такая система фото-обнаружения, среди прочих недостатков, таких как, например, неверно истолкованное как отскок на линии пересечение луча через область, которая не находится на линии (как приемник, так и излучатель отделены определенным расстоянием от концов контролируемой линии), имеет тот недостаток, что она явно не в состоянии выполнять трехмерное обнаружение, т.е. она выполняет только двумерное обнаружение, что делает его, очевидно, невозможно обнаружить сферу, т.е. трехмерный объект, и в самом лучшем случае способна обнаруживать, создает ли объект, в любом из своих положений, двумерный круговой силуэт, что может произойти, даже несмотря на то, что объект не является сферическим.
С другой стороны, известны несколько различных предложений о тренировочных системах, обеспечивающих одну или несколько мишеней на теннисном корте, при этом игрок пытается ударить по мячу так, чтобы тот отскочил от выбранной мишени, и обнаруживающих, с большей или меньшей точностью, в какие зоны теннисного корта попадает мяч после ударов игрока.
Одно из таких предложений описано в патенте US 2008293522 A1, который предусматривает свободно позиционируемые на теннисном корте тренировочные мишени, а также дисплей, который реагирует на сигнал, генерируемый мишенью (например, беспроводным способом) и обеспечивает индикацию при попадании в каждой зоне. На дисплее отображается количество попаданий в каждой зоне, а также световые и/или звуковые сигналы, указывающие на попадание в каждой зоне. Мишень представляет собой мат с зонами, чувствительными к воздействиям, например, образованными пьезоэлектрическими элементами или другими датчиками.
Патент ES 2421399 T3 предлагает один из матов-мишеней для обнаружения ударов шаров.
В патенте TW 201135216 A предлагается обнаруживать зоны попадания мяча, в данном случае, на столе для пинг-понга, используя массив передатчиков и приемников лазерного луча.
Более того, международная заявка WO 2013124856 A1 касается системы мониторинга и анализа движущихся объектов и применима, в частности, для тенниса, при этом применение состоит в маркировке различных положений виртуального соперника на теннисном корте с использованием лазерного указателя или голограммы, автоматически следуя заданной программе обучения или моделирования виртуального соперника. Определение места удара теннисного мяча, т.е. попал ли он в виртуального соперника или его отметку, выполняется системой, основанной исключительно на камерах.
Все описанные тренировочные системы, которые обеспечивают одну или несколько мишеней на теннисном корте, очевидно, могут быть усовершенствованы в плане точности в выявлении попадания мяча в мишень.
Сущность изобретения
Необходимо создать альтернативу предшествующему уровню техники, которая будет заполнять обнаруженные в нем пустоты, и, в частности, обеспечит повышенную производительность и эффективность, с точки зрения процента успешных срабатываний или результатов, и заметно превосходит те, что получены с помощью способа и системы, предложенных в WO 2007098537 A1, и которая, помимо того, также явно улучшит точность определения местоположения столкновения сферического элемента с мишенью по сравнению с известными системами и способами.
С этой целью настоящее изобретение относится, согласно первому объекту, к способу определения факта столкновения сферического элемента с компонентом игрового поля или расположения на нем или вблизи него, где упомянутое поле образовано рядом игровых зон, при этом способ включает в себя:
a) получение последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, охватывающей, по меньшей мере, часть, по меньшей мере, упомянутого компонента;
b) выполнение приблизительного определения местоположения столкновения сферического элемента с упомянутым компонентом или рядом с ним;
c) автоматический выбор, в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени, при этом изображение включает в себя зону, где произошло упомянутое столкновение; и
d) анализ, по меньшей мере, одного выбранного изображения для проверки, действительно ли сферический элемент столкнулся или нет с упомянутым компонентом.
В отличие от известных предложений, способ, предложенный согласно первому объекту настоящего изобретения, включает, что характерно, выполнение вышеупомянутого приблизительного определения местоположения с помощью системы обнаружения и распознавания объекта, которая может автоматически распознавать, когда обнаруженный объект действительно является сферическим элементом, для чего, очевидно, система обнаружения и распознавания объекта относится к трехмерному типу.
Согласно предпочтительному варианту осуществления, компонент игрового поля является одной из линий периметра среди тех линий периметра, которые ограничивают игровые зоны, и способ предназначен для оценки того, отскочил ли сферический элемент внутри или снаружи этих игровых зон, при этом отскок составляет упомянутое столкновение, при этом:
упомянутый этап а) включает получение последовательности изображений, по меньшей мере, из одной зоны наблюдения игрового поля, которое охватывает, по меньшей мере, часть, по меньшей мере, одной из упомянутых линий периметра, как правило, состоящей из одной или нескольких зон наблюдения, где вместе они охватывают все линии периметра игровых зон;
упомянутый этап b) включает выполнение приблизительного определения местоположения отскока сферического элемента от одной из упомянутых линий периметра или вблизи нее;
упомянутый этап с) включает автоматический выбор, в ответ на упомянутое приблизительное определения местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений,
полученного для этого же момента времени и включающего в себя зону, где происходил упомянутый отскок; и
упомянутый этап d) включает анализ, по меньшей мере, одного выбранного изображения, для проверки того, действительно ли сферический элемент отскочил от упомянутой линии периметра, чтобы определить, что сферический элемент отскочил внутри или снаружи игровой зоны, ограниченной упомянутой линией периметра этапа b).
Согласно другому варианту осуществления (в целом альтернативному представленному выше, но который также может быть объединен с ним), компонент упомянутого игрового поля является мишенью, расположенной внутри, по меньшей мере, одной из упомянутых игровых зон, которые ограничены линиями периметра, при этом
упомянутый этап а) включает получение последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, охватывающей, по меньшей мере, часть упомянутой мишени;
упомянутый этап b) включает выполнение приблизительного определения местоположения отскока сферического элемента от упомянутой, по меньшей мере, одной мишени или вблизи нее;
упомянутый этап с) включает автоматический выбор, в ответ на упомянутое приблизительное определения местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени и включающего в себя зону, где происходил упомянутый отскок; и
упомянутый этап d) включает анализ выбранного изображения, из которых должно быть, по меньшей мере, одно для проверки, действительно ли сферический элемент отскочил или нет от мишени, как было определено на этапе b).
Согласно предпочтительному варианту этого осуществления изобретения, например, когда компонент является мишенью, последняя образована субзоной, по меньшей мере, одной из игровых зон, и отмечена физически или виртуально на земле, будучи спроецированной на землю (например, с помощью лазерного указателя) или на средстве отображения, видном игроку, например на большом экране, размещенном на игровом поле.
Менее предпочтительно, если мишень не состоит из субзоны игровой зоны, а вместо этого размещена на ней, не обязательно на уровне земли, физически или виртуально (как в случае записи информации).
В продолжение этого варианта осуществления способ включает дополнительно изменение формы, размера и/или положения мишени относительно игрового поля и выполнение этапов а)-d), чтобы обнаружить, отскочил или нет сферический элемент от модифицированной мишени.
В качестве альтернативного варианта, или в дополнение, способ включает, после завершения этапа d) для мишени, выбор другой мишени и исполнение этапов a)-d), чтобы обнаружить, отскочил или нет сферический элемент от упомянутой другой мишени.
Для варианта осуществления, в котором способ согласно первому объекту изобретения применяется для определения того, действительно ли сферический элемент отскочил от мишени, это предпочтительно связано со способом тренировки или системой, которая выполняет вышеупомянутый выбор и/или модификацию или адаптацию мишеней, а также их счет и повторение, по выбору игрока или тренера, например, удаленно с помощью мобильного вычислительного устройства (например, «планшетного ПК» или «смартфона»), или автоматически с помощью учебной предварительно заложенной программы, которая измеряет результаты, полученные игроком, в зависимости от его цели при попадании сферическим элементом по мишеням. Все точки, зоны (т.е. мишени или различные зоны мишеней и т.д.), можно рассматривать в прямом эфире на экране на игровом поле и/или управлять ими через упомянутое мобильное вычислительное устройство.
Предпочтительно упомянутая тренировочная система включает в себя мобильный робот или машину, которая, если игровое поле представляет собой теннисный корт, движется вдоль корта, запуская мячи на основе настроенной серии или в зависимости от положения игрока, которое определяется самой системой обнаружения и распознавания объекта.
Эта тренировочная система дополнительно включает в себя другие виды измерительных приборов, например, для скорости и/или мощность мяча, выпущенного игроком, обеспечивая тем самым не только точность попадания в результате, но также измерения скорости и/или мощности.
Хотя эта заявка не защищает такой способ или систему тренировки, которые связаны с способом и/или системой настоящего изобретения, включенное сюда описание достаточно для поддержки и требования независимой защиты таких способа и системы тренировки, например, через выделенную заявку.
Способ, предложенный согласно первому объекту изобретения, также применим к обнаружению столкновения сферического элемента с компонентом, который не является ни одним из двух, описанных выше, т.е. это не линия периметра или мишень, как, например, если игровое поле представляет собой теннисный корт, стойка (около игрового поля, как в случае со стойками, удерживающими центральную сетку), центральная сетка (как участок, находящийся в игровом поле, ограниченный линиями периметра, так и участок вне пределов, т.е. область, близкая к игровому полю, и т.д.). Для других видов игровых полей компоненты могут быть различных видов, таких как, например, баскетбольная площадка, обод корзины или игрок и т.д.
Для одного варианта осуществления изобретения способ включает применение трехмерного сканера в качестве системы обнаружения и распознавания, активной или пассивной, с использованием любой из известных в предшествующем уровне техники систем «неконтактного» типа, т.е. таких, которые работают на основе анализа отраженного сигнала (непосредственно излученного в случае активных систем или собственного сигнала окружающей среды в случае пассивных система) для фиксации геометрии объекта или места. Могут быть использованы электромагнитные волны (от радиоволн до рентгеновских лучей) или ультразвук, которые могут быть в сочетании с различными устройства для передачи и обнаружения, такими как лазерный излучатель (например, структурированного света или модулированного света), а также детектор, содержащий камеру, которая обнаруживает отраженный свет.
Для предпочтительного варианта осуществления, эта трехмерная сканирующая система является активной лазерной сканирующей системой, например, системой LIDAR (сокращение от «Light Identification Detection and Ranging", т.е. световое обнаружение и определение дальности, в русскоязычной литературе Лидар), которая включает в себя один или несколько лазерных сканеров.
В качестве альтернативного варианта трехмерная сканирующая система состоит из множества камер, работающих синхронно и пространственно расположенных так, чтобы получать трехмерную информацию, и которые, таким образом, способны обнаруживать и распознавать трехмерные объекты, и, следовательно, автоматически распознавать, когда обнаруженный объект действительно представляет собой сферический элемент.
В зависимости от варианта осуществления изобретения, вышеупомянутое приблизительное определение местоположения на этапе b) включает выполнение двух или более определений местоположения, включающих, по меньшей мере, момент, когда произошло упомянутое столкновение или отскок, и/или, по меньшей мере, момент непосредственно перед столкновением или отскоком и/или, по меньшей мере, момент сразу после столкновения или отскока, используя на упомянутом этапе с) в качестве момента времени для автоматического выбора упомянутого изображения, по меньшей мере, один из моментов времени упомянутых определений местоположения, предпочтительно один, соответствующий столкновению или отскоку, или момент непосредственно перед ними.
Для вариантов осуществления, где компонент, на котором определяют местоположение столкновения сферического элемента, находится на уровне земли, как в случае с линией периметра, и, в целом, мишеней, такое определение местоположения выполняется примерно на той же высоте или вблизи земли, чтобы обнаружить сферический элемент, когда он отскакивает от нее, и когда он собирается или только что отскочил, в соответствии с вариантом осуществления, с помощью двух соответствующих лазерных сканеров.
Если компонент не находится на уровне земли, например, центральная сетка теннисного корта, приблизительное определение местоположения выполняется на подходящей высоте для этого компонента.
Согласно одному варианту осуществления способ включает перед приблизительным определением местоположения и, в целом, на его большей высоте, выполнение предварительного обнаружения прохода сферического элемента через, по меньшей мере, две точки, расположенные на различных высотах, и выполнение на основе упомянутого предварительного обнаружения, предсказания траектории перемещения сферического элемента к земле, а также предварительное определение местоположения или предопределение приблизительной области,, где будет происходить столкновение или отскок.
Для варианта осуществления, где приблизительное определение местоположения не выполняется на уровне земли, как в случае, рассмотренном выше, в котором компонент является центральной сеткой теннисного корта, по меньшей мере, одно предварительное обнаружение, подобное описанному, происходит на более низкой высоте, чем приблизительное определение местоположения, для того, чтобы предсказать восходящую траекторию сферического элемента, как было бы в случае, когда теннисный игрок ударяет мяч снизу, направляя вверх, чтобы мяч прошел над центральной сеткой. Этот вариант осуществления является альтернативой (если нужно охватить только восходящую траекторию) или дополнением (если нужно охватить обе траектории: идущую вверх и идущую вниз) к предыдущему варианту осуществления.
Упомянутое предварительное обнаружение или предопределение приблизительной области, где будет происходить столкновение или отскок сферического элемента, происходящее, как описано в предыдущих пунктах или с помощью любого другого вида механизма, считающегося подходящим специалистами в данном вопросе, само по себе представляет собой альтернативу приблизительному определению местоположения на этапе b). То есть согласно другому объекту настоящего изобретения, альтернативному первому объекту, настоящее изобретение относится к способу определения факта столкновения сферического элемента с компонентом игрового поля или расположения на нем или вблизи него, при этом упомянутое поле образовано игровыми зонами, причем способ включает:
a) получение последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, охватывающей, по меньшей мере, часть, по меньшей мере, упомянутого компонента;
b) выполнение предварительного обнаружения или предварительного определения приблизительной зоны, где будет происходить столкновение или отскок сферического элемента;
c) автоматический выбор, в ответ на упомянутое предварительное обнаружение или предварительное определение, приблизительной зоны, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени, в который ожидается столкновение или отскок, и включающего в себя зону, где упомянутые ожидаемые столкновение или отскок произойдут; и
d) анализ выбранного изображения, из которых должен быть, по меньшей мере, один, для проверки, действительно ли сферический элемент столкнулся с упомянутым компонентом, либо отскочил от упомянутого компонента, либо нет.
Способ, предложенный этой альтернативой первому объекту настоящего изобретения, включает, предпочтительно, выполнение вышеупомянутого приблизительного определения местоположения системой обнаружения и распознавания объекта, которая может распознавать автоматически, когда обнаруженный объект действительно является сферическим элементом, для чего, очевидно, система обнаружения и распознавания объекта должна быть трехмерного типа.
Способ включает проведение такого предварительного обнаружения с помощью, по меньшей мере, двух устройств обнаружения, таких как два лазерных сканера из системы обнаружения и распознавания объекта, расположенных в двух вышеупомянутых точках на различных высотах.
Способ включает автоматическое распознавание, когда обнаруженный объект действительно представляет собой сферический элемент, на основе разницы в сигналах обнаружения, предназначенных для обнаружения системой обнаружения и распознавания по сравнению с сигналами обнаружения, являющимися результатом обнаружения других элементов, стационарных или мобильных, имеющих, по меньшей мере, другие формы и размер.
Система обнаружения и распознавания «знает», где расположены ноги игроков или любой другой элемент корта, что позволяет делать различие между сферическим элементом и этими элементами. Впоследствии, при пояснении системы, предложенной согласно второму объекту изобретения, будет приведено более подробно описание компонентов системы и их работы для выполнения вышеупомянутого обнаружения и автоматического различения сферического элемента от других элементов. Нижеприведенное описание функционирования таких элементов должно также считаться действительным для определения действий, выполняемых в соответствии со способом, предложенным согласно первому объекту изобретения, для некоторых вариантов осуществления.
Для других вариантов осуществления способ включает использование в качестве системы обнаружения и распознавания, альтернативно или дополнительно к лазерной сканирующей системе, других типов детекторов, например, линейных извещателей (в этом случае в качестве дополнения к подходящей системе фиксации трехмерной информации) или камер, или других типов сканирующих систем, подобных тем, что указаны выше.
Для предпочтительного варианта осуществления упомянутый сферический элемент представляет собой теннисный мяч, а игровое поле представляет собой теннисный корт, где игровые зоны являются различными прямоугольными областями теннисного корта, при этом способ определяет, отскочил ли мяч внутри или снаружи корта, или же он отскочил внутри или снаружи прямоугольной зоны, используемой для подачи.
В продолжение этого предпочтительного варианта осуществления применительно к теннису, в соответствии с его изменением, способ, предложенный согласно первому объекту настоящего изобретения, включает выбор в качестве линий периметра для проверки, действительно попал теннисный мяч или нет, следующих линий:
- тех, которые обозначают соответствующую зону подачи (слева или справа), в которой игрок будет подавать или подал, чтобы определить, отскочил теннисный мяч внутри или снаружи зоны подачи; или
- тех, которые обозначают общую игровую зону для одиночной или парной игры во время матча после подачи.
Кроме того, способ включает получение информации о том, коснулся ли после подачи теннисный мяч сетки или нет, и на основе этой информации, после определения того, отскочил ли теннисный мяч внутри или снаружи зоны подачи, способ включает в себя выдачу сигнала, указывающего, что:
- подачу надо повторить, если мяч отскочил внутри зоны подачи, но после касания сетки, или
- подачу не нужно повторять, если мяч отскочил за пределы зоны подачи после касания сетки.
Определение того, мяч коснулся сетки или нет, может быть выполнено с помощью датчика, расположенного на самой сетке, или даже системой обнаружения и распознавания объекта, использующей средства способа, предложенного согласно первому объекту настоящего изобретения.
В зависимости от типа игры, если сферический элемент коснулся линии периметра, будет считаться, что он отскочил в игровую зону, например, в предпочтительном случае применительно к теннису, или наружу игровой зоны, как было бы в менее предпочтительном случае применительно к баскетболу.
Согласно одному варианту осуществления этап d) включает показ выбранного изображения или изображений на средстве отображения, чтобы выполнить вышеупомянутый анализ путем визуального рассмотрения изображения, или в дополнение к упомянутому анализу.
Для одного варианта осуществления изобретения анализ этапа d) представляет собой автоматический анализ, осуществляемый путем обработки изображений программами или алгоритмами.
В зависимости от варианта осуществления изобретения способ включает инициацию этапа d) по просьбе игрока или судьи, или автоматически после выбора этапа с).
В первом случае просьба игрока или судьи может потребовать вмешательства третьей стороны, например, оператора, чтобы начать этап d) после получения запроса, жестом или голосом, игрока или судьи, или автоматически, например, путем внедрения системы управления, которая распознает жест игрока или судья и автоматически активирует начало этапа d).
Такие системы распознавания и управления жестами известны, начиная с тех, которые основаны на анализе изображений, которые фиксируют эти жесты, до более сложных систем, которые включают в себя устройство датчика движения, носимое игроком или судьей, такие как инерциальные и/или электромиографические браслеты, которые могут распознать жест, выполняемый запястьем и/или рукой, и/или плечом игрока и/или судьи.
Согласно одному варианту осуществления изобретения этап с) способа, предложенного согласно первому объекту изобретения, включает выбор множества изображений, расположенных в последовательности, которая включает в себя изображение, полученное для момента времени, определенного при приблизительном определении местоположения, и изображения для моментов времени до и после этого момента времени.
Вышеупомянутый автоматический анализ проводят, согласно одному варианту осуществления изобретения, по отношению к упомянутому множеству выбранных изображений, и он включает в себя, по меньшей мере, выбор изображения, где сферический элемент представляется наиболее деформируемым при контакте с землей и/или с упомянутым компонентом, а также его последующий автоматический анализ и/или его отображения на упомянутом средстве отображения.
Для одного варианта осуществления изобретения этап d) включает воспроизведение видеозаписи, включая упомянутое множество изображений, при замедленном движении вперед и/или назад и/или остановку для того, чтобы выполнить вышеупомянутую визуальную оценку.
Для другого варианта осуществления изобретения дополнительно или альтернативно к вышеописанному этап d) включает отображение увеличенной рассматриваемой области выбранного изображения или изображения по центру зоны столкновения или отскока сферического элемента.
Способ включает выполнение этапа а), согласно предпочтительному варианту осуществления изобретения, посредством множества высокоскоростных камер, охватывающих различные компоненты игрового поля или расположенных на нем или вблизи него, и/или различные участки линий периметра с обеих сторон и/или концов, и/или все мишени с различных сторон.
Согласно одному варианту осуществления изобретения как в первом объекте, так и в вышеупомянутом объекте, альтернативном к первому объекту, способ включает использование описанного выше предварительного определения приблизительной зоны, где будет происходить столкновение или отскок, чтобы активировать (если еще не активирована) и/или управлять, по меньшей мере, одной из упомянутых высокоскоростных камер, зона покрытия которых включает в себя приблизительную заранее заданную зону, причем это управления выполняют применительно, например, к характеристикам микрофокуса активированной камеры для того, чтобы сосредоточить область захвата изображений в изучаемой зоне.
Второй объект изобретения относится к системе определения того, столкнулся ли сферический элемент с компонентом игрового поля или расположен на нем или вблизи него, причем упомянутое поле образовано несколькими игровыми зонами, при этом система содержит:
- средство получения и записи изображений, сконфигурированное и размещенное для приема и записи последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, которое охватывает, по меньшей мере, часть упомянутого компонента;
- средство обнаружения, сконфигурированное и размещенное для выполнения приблизительного определения местоположения столкновения сферического элемента с упомянутым компонентом или расположения рядом с ним;
- средство автоматического выбора, соединенное с упомянутым средством обнаружения, с доступом к упомянутому записанному изображению, и сконфигурированное для автоматического выбора, в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени, и которые включает в себя зону, где произошло упомянутое столкновение; и
- средство отображения и/или анализа, сконфигурированного для, соответственно, показа упомянутого, по меньшей мере, одного выбранного изображения, для обеспечения его рассмотрения с помощью визуального анализа и/или для его автоматического анализа, с целью проверки, действительно ли сферический элемент столкнулся с упомянутым компонентом.
В отличие от известных систем, в системе, предложенной согласно второму объекту настоящего изобретения, что характерно, средство обнаружения содержит систему обнаружения и распознавания объекта, которая может распознавать автоматически, когда обнаруженный объект действительно является сферическим элементом.
Согласно предпочтительному варианту осуществления компонент игрового поля является одной из линий периметра среди тех линии периметра, которые разграничивают игровые зоны, и система предназначена для определения того, отскочил ли сферический элемент внутри или снаружи этих игровых зон, причем отскок образуется упомянутым столкновением, при этом:
- упомянутое средство получения и записи изображений сконфигурировано и размещено для приема и записи последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, которые охватывает, по меньшей мере, часть, по меньшей мере, одной из упомянутых линий периметра;
- упомянутое средство обнаружения сконфигурировано и размещено для выполнения приблизительного определения местоположения отскока сферического элемента от одной из упомянутых линий периметра или вблизи нее;
- упомянутое средство автоматического выбора связано с упомянутым средством обнаружения, с доступом к упомянутым записанным изображениям, и сконфигурировано для автоматического выбора в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени, и которое включает в себя зону, где произошел упомянутый отскок; и
- упомянутое средство отображения и/или анализа сконфигурировано, соответственно, для показа упомянутого, по меньшей мере, одного выбранного изображения, для обеспечения его оценки с помощью визуального анализа и/или для его автоматического анализа, с целью проверки, действительно ли сферический элемент отскочил от упомянутой линии периметра упомянутого приблизительного определения местоположения, с тем, чтобы определить, отскочил ли сферический элемент внутри или снаружи игровой зоны, ограниченной упомянутой линией периметра.
Согласно другому варианту осуществления (в целом альтернативному вышеуказанному, но который также может быть объединен с ним) компонент упомянутого игрового поля является мишенью, расположенной внутри, по меньшей мере, одной из упомянутых игровых зон, которые разделены линиями периметра, при этом:
- упомянутое средство получения и записи изображений сконфигурировано и размещено для приема и записи последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, которые охватывает, по меньшей мере, часть, по меньшей мере, одной из упомянутых мишеней;
- упомянутое средство обнаружения сконфигурировано и размещено для выполнения приблизительного определения местоположения отскока сферического элемента от одной из упомянутых мишеней или вблизи нее;
- упомянутое средство автоматического выбора соединено с упомянутым средством обнаружения, с доступом к упомянутым записанным изображениям, и сконфигурировано для автоматического выбора, в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени, и которое включает в себя зону, где произошел упомянутый отскок; и
- упомянутое средство отображения и/или анализа сконфигурировано, соответственно, для показа упомянутого, по меньшей мере, одного выбранного изображения, для обеспечения его визуального анализа и/или для его автоматического анализа, с целью проверки, действительно ли сферический элемент отскочил от мишени на этапе b).
Согласно предпочтительному варианту этого осуществления изобретения, где компонент является мишенью, последняя образована субзоной, по меньшей мере, одной из игровых зон, в результате чего вышеупомянутое средство отображения также сконфигурировано для отображения упомянутой мишени посредством ее изображения, зафиксированного, по меньшей мере, одной камерой, когда мишень отмечена физически на земле, или посредством ее виртуального представления, когда мишень только помечена виртуально, спроецирована на землю или с помощью средства отображения видна игроку.
Предпочтительно, что сферический элемент представляет собой теннисный мяч, а игровое поле представляет собой теннисный корт, при этом игровые зоны представляют собой различные прямоугольные зоны теннисного корта.
Для одного варианта осуществления система обнаружения и распознавания включает в себя любую трехмерную сканирующую систему, активную или пассивную, из описанных выше со ссылкой на предложенный способ согласно первому объекту изобретения, или любую известную систему.
Согласно предпочтительному варианту осуществления система обнаружения и распознавания включает в себя, по меньшей мере, одну лазерную сканирующую систему, которая содержит один или несколько лазерных сканеров.
Согласно одному варианту осуществления система обнаружения и распознавания содержит, для выполнения вышеупомянутого приблизительного определения местоположения, по меньшей мере, первое устройство обнаружения (например, лазерный сканер), расположенное на уровне земли или вблизи нее, с областью охвата, включающей в себя, по меньшей мере, часть компонента и/или линии периметра, и/или мишени, на которой или рядом с которой происходит упомянутое столкновение или отскок.
В одном варианте осуществления, система обнаружения и распознавания содержит, по меньшей мере, второе и третье устройство обнаружения (например, два лазерных сканера), расположенных в двух соответствующих точках на различных высотах, при этом оба расположены выше, чем первое устройство обнаружения, расположенные и сконфигурированные для обнаружения прохождения движущегося элемента через, по меньшей мере, упомянутые две точки, причем система обнаружения и распознавания сконфигурирована для выполнения на основе обнаружения прохождения через упомянутые две точки прогноза траектории, по которой должен следовать подвижный элемент, и для различения, является ли он или нет сферическим элементом.
Когда движущийся элемент, прохождение которого по упомянутым двум точкам было обнаружено, является сферическим элементом, вышеупомянутый прогноз его траектории также включает в себя ранее описанный (со ссылкой на способ согласно первому объекту изобретения) прогноз и предварительное определение приблизительной области, где будет происходить отскок.
Система обнаружения и распознавания может автоматически распознать, когда обнаруженный объект действительно представляет собой сферический элемент, потому что включает в себя систему обработки, которая реализует сложный алгоритм с доступом к обнаруженной информации из всех устройств обнаружения, перечисленных выше, как для записанной ранее для стационарных элементов, расположенных в зоне охвата устройств обнаружения, так и тех, что соответствуют текущему обнаружению движущихся элементов, сначала через второе и третье устройства обнаружения, описанные выше, для выявления прохождения движущегося элемента и его траектории, и затем с помощью устройства обнаружения, расположенного на уровне грунта, позволяющего проверить, например, является ли движущийся элемент ногой человека.
Единственным движущимся элементом с размерами сферического элемента является сферический элемент сам по себе, чье обнаружение устройством обнаружения приводит к выдаче сигналов, которые полностью отличается от сигналов, производимых другими элементами.
Для предпочтительного варианта осуществления, в котором устройствами обнаружения являются лазерные сканеры, они обеспечивают дистанционное получение информации по отношению к ним от каждой точки контакта лазерного луча с обнаруженным объектом, при этом группировка и количество точек контакта является очень разным, когда элемент представляет собой сферический элемент или, например, ногу игрока.
Предпочтительно, что система обнаружения и распознавания содержит множество из первого, второго и третьего устройств обнаружения, сконфигурированных для покрытия различных зон, и, как выше упомянуто, игровых зон, что позволяет, в случае, когда они являются лазерными сканерами, вычислить положение каждого объекта в игровых зонах в любой момент времени.
Для одного варианта осуществления, система содержит средство управления, подключенное к средству автоматического выбора и к упомянутому средству отображения и/или анализа, для управления последним, так что они отображают (предпочтительно увеличенное) и/или анализируют выбранное изображение или изображения, например, на экран, расположенный на корте или любой другой тип устройства отображения.
Средство получения и записи изображений системы, предложенное вторым объектом изобретения, содержит, согласно одному варианту осуществления, множество высокоскоростных камер (по меньшей мере, порядка 1000 кадров в секунду), расположенных так, что их зоны покрытия охватывают различные компоненты упомянутого игрового поля или расположены на нем или вблизи него, с различных сторон компонентов, и/или различных участков линий периметра с обеих сторон и/или концов и/или все мишени с их различных сторон таким образом, что при выборе изображения, выполненного средством автоматического выбора на основе информации о районе, где было примерно обнаружено столкновение или отскок мяча, была выбрана высокоскоростная камера, наблюдающая за этой зоной, в свою очередь, выбирающая изображение, снятое этой камерой точно в ту миллисекунду, в которую произошло приблизительное определение местоположения.
Эти высокоскоростные камеры предпочтительно расположены на уровне земли или фактически на уровне земли, так что они точно фиксируют контактную поверхность мяча, когда он деформируется на земле, что, вместе с большим количеством изображений, зафиксированных второй камерой, позволяет выбрать для анализа изображение, где мяч выглядит наиболее деформированным, без какого-либо моделирования, благодаря чему точность системы очень высока.
Согласно одному варианту осуществления изобретения, по меньшей мере, одна из высокоскоростных камер или другая камера, входящая в состав средства получения и записи изображений, предпочтительно обе, является подвижной.
Запоминающее устройство или устройства, где записаны изображения, являются частью электронной схемы самих камер или внешней электронной системы.
Согласно разновидности этого варианта осуществления изобретения мобильные камеры и/или TOF камеры («время полета») установлены на интеллектуальных мобильных роботах, которые «понимают» обстоятельства игры. Каждый из этих роботов включает в себя систему наблюдения, отслеживания и прогноза, что делает его компетентным в обстоятельствах игры, в том числе положения в любой момент времени игроков и сферического элемента, и он предсказывает, путем вычисления, где сферический элемент будет ударяться или отскакивать, что делает робота, на основе такого знания и прогнозирования, пригодным для нахождения лучшего угла фиксации мобильной камеры и движущейся в направлении области, где сферический элемент, как ожидается, отскочит, обеспечивая получение изображения наиболее интересной зоны, и, следовательно, более точный расчет.
Также можно, согласно другому варианту осуществления изобретения, использовать описанное выше предварительное определение приблизительной зоны, где будет происходить отскок, для того, чтобы управлять роботом и направить его к ней с целью получения детального изображения отскока сферического элемента.
Система согласно второму объекту сконфигурирована для реализации способа согласно первому объекту, выполняя этапы автоматического выбора и автоматического анализа изображений обычно посредством программного обеспечения, установленного в компьютерной системе, которая реализует средство выбора и анализа. Описание всех вариантов осуществления способа, предложенного согласно первому объекту изобретения, таким образом, применимо для описания аналогичных вариантов осуществления, относящихся к системе, предложенной вторым объектом изобретения, причем последняя включает в себя соответствующее средство для выполнения функций, описанных в связи со способом, в том числе средство, уже описанное выше или дополнительно к нему.
Вышеупомянутое программное обеспечение, установленное в компьютерной системе, которая включает в себя средство выбора и анализа, таким образом, обеспечивает в прямом эфире и практически в режиме реального времени анализ того, отсутствует мяч или нет (информация предпочтительно передаются менее, чем за секунду), путем реального анализа изображения большего контакта, а не путем моделирования. Другим вариантом для игрока является просмотр изображения и отскока и самостоятельное решение или просьба к системе автоматически проанализировать отскок.
Игрок может запросить этот автоматический анализ и/или отображение выбранного изображения, что можно назвать запросом «лисьего глаза», сделав жест рукой, который интерпретируется любой из систем распознавания жестов, упомянутых выше, встроенных в систему, предложенную вторым объектом изобретения, например, инерционным и/или электромиографическим браслетом, носимым игроком, который понимает и декодирует жест руки, как заданное движение, и отдает приказ системе на отображение изображения и/или выполнение автоматического анализа.
Система, предложенная вторым объектом изобретения, является системой максимальной точности (до одного миллиметра), работает с реальными изображениями, т.е. не моделируется, что, для ее вариантов осуществления, где все действия выполняются автоматически, не требует вмешательства третьих сторон, и может устанавливаться на любой теннисный корт.
Даже если система, предложенная вторым объектом изобретения, установлена на открытом воздухе, на нее не влияют ни высокие температуры на корте, ни тени, ни солнечный свет, ни люди или другие объекты, присутствующие в зоне покрытия системы обнаружения и распознавания, так как она «знает», чем является каждый обнаруженный объект. Размер и форма сферического элемента позволяет компьютерному средству, с данными устройств обнаружения, четко отличать его от любого другого объекта. Также любые потенциальные промежуточные элементы между камерой и сферическим элементом не могут иметь негативное влияние, поскольку есть камеры для получения изображения с нескольких различных углов, что всегда гарантирует «чистый» прямой охват сферического элемента.
Система не зависит от имитации, чтобы быть в курсе реального отскока мяча, и не требует от других управления системой, ни влечет за собой чрезмерных расходов (каждая высокоскоростная камера имеет гораздо более низкую стоимость, чем каждая камера, используемая в системе «ястребиный глаз»).
Краткое описание чертежей
Вышеупомянутые и другие преимущества и характеристики будут более полно понятны из последующих подробных описаний вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, которые должны быть приняты в качестве иллюстрации, а не ограничения.
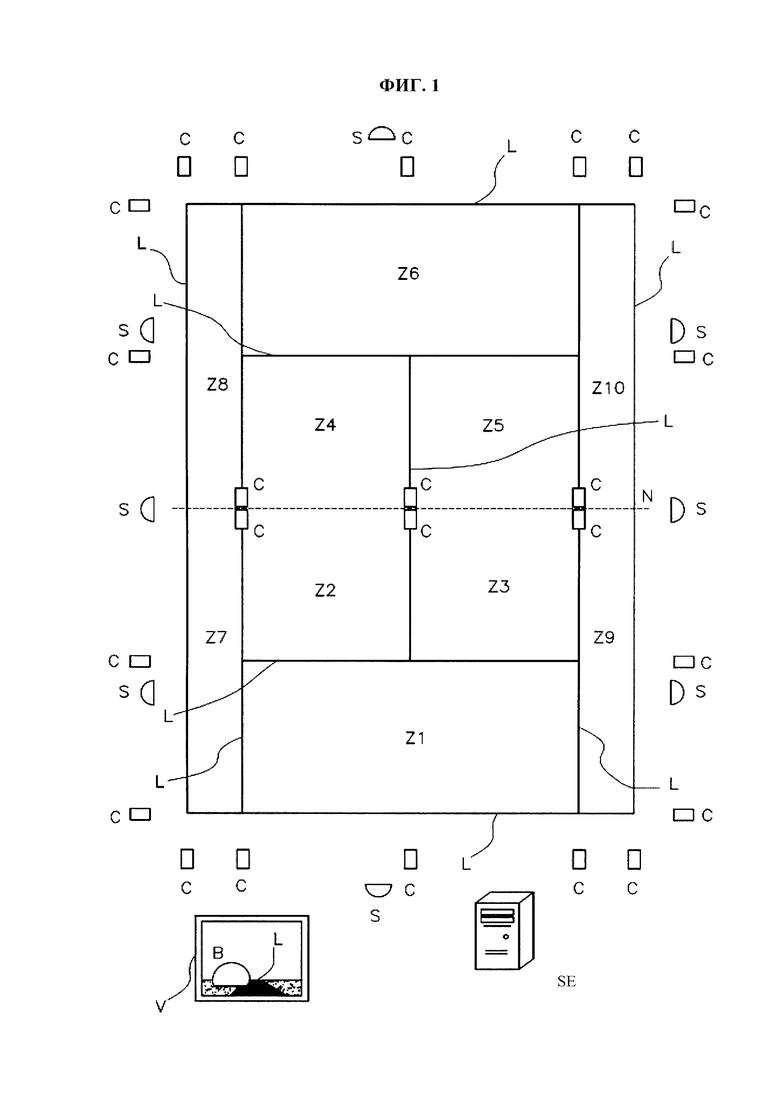
Фиг. 1 является схематическим представлением на виде в плане системы, предложенной вторым объектом изобретения, с ее элементами, расположенными на теннисном корте, и связанной с обнаружением отскока теннисного мяча на линиях периметра, обозначающих границы игровых зон;
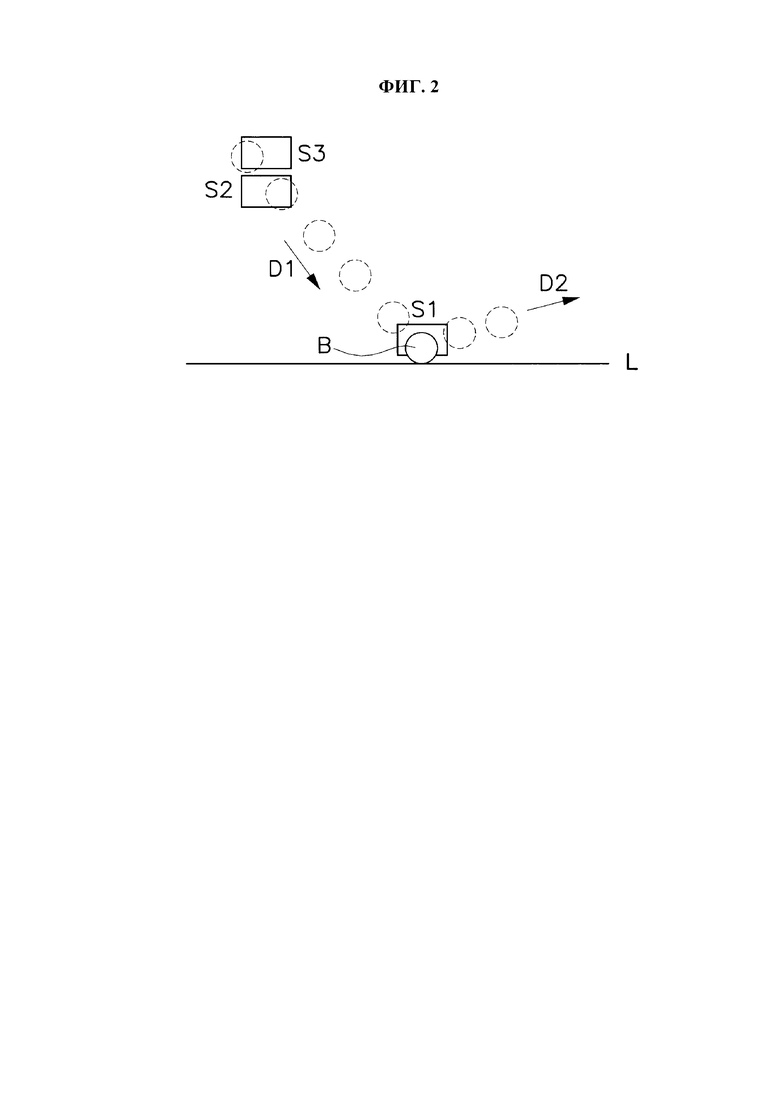
Фиг. 2 представляет схематическое изображение сбоку устройств обнаружения системы обнаружения и распознавания, предложенной вторым объектом изобретения, расположенных на различных высотах по отношению к линии периметра игровой зоны;
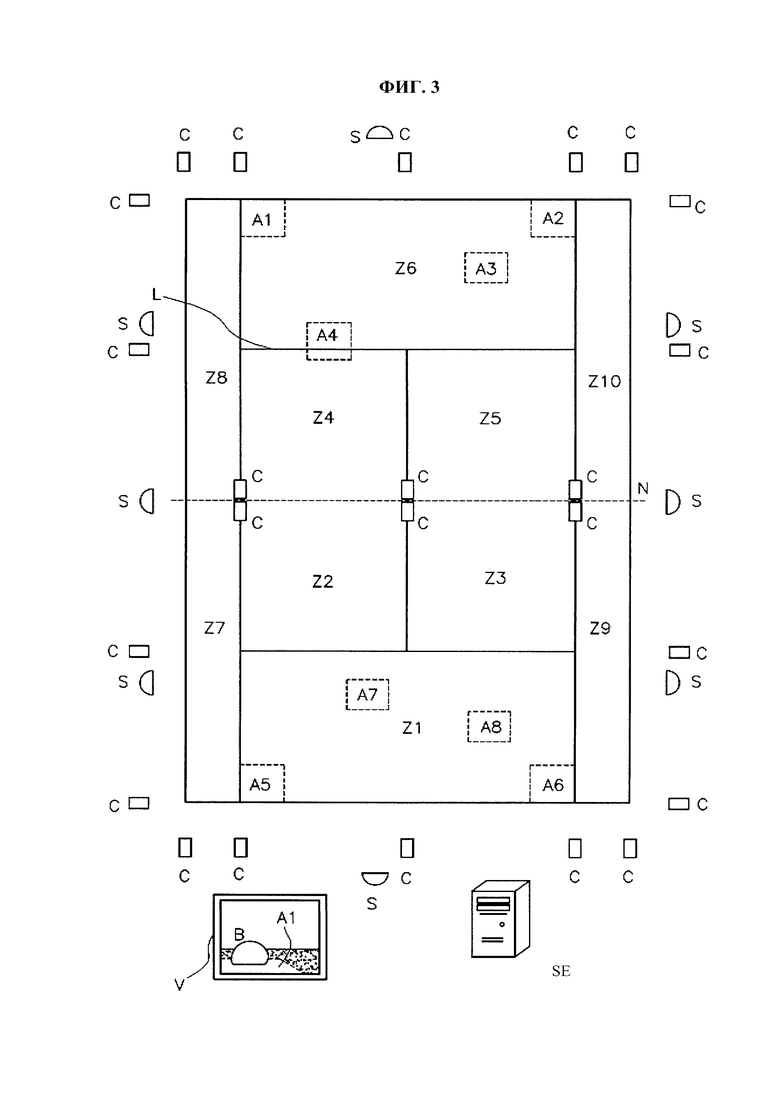
Фиг. 3 представляет собой вид, аналогичный фиг.1, но связанный с обнаружением отскока теннисного мяча от мишеней, размещенных в различных зонах теннисного корта, и показанных пунктирными линиями.
Подробное описание варианта осуществления изобретения
На фиг. 1 представлен теннисный корт с рядом прямоугольных игровых зон Z1-Z10, на которые корт разделен, для использования во время теннисного матча, в силу чего прямоугольные зоны Z1-Z10 разделены линиями L периметра, которые образуют как общую игровую зону, которая для одиночных матчей не включает в себя зоны Z7, Z8, Z9 и Z10, но которые учитываются в парных встречах как игровые субзоны, например, в случае с зонами Z2, Z3, Z4 и Z5, соответствующими зонам подачи, причем интерес представляет определение того, отскочил ли теннисный мяч и от линий L периметра упомянутых зон Z2-Z5 подачи, во время подачи, и от линий, которые разграничивают общую игровую зону, во время обмена ударами после подачи.
Система, предложенная вторым объектом изобретения, включает в себя для варианта осуществления изобретения, проиллюстрированного упомянутой фиг. 1:
- средство получения изображений и регистрации, которое включает в себя множество высокоскоростных камер С, расположенных вокруг теннисного корта, предпочтительно на уровне земли, охватывающих различные участки линий L периметра и примыкающие к ним зоны;
- средство обнаружения, сконфигурированное и расположенное для выполнения приблизительного определения местоположения отскока теннисного мяча В от одной из линий L периметра или вблизи нее, которое содержит систему обнаружения и распознавания объекта, что позволяет различить, когда обнаруженный объект действительно представляет собой теннисный мяч, и которое включает в себя ряд лазерных сканеров или групп лазерных сканеров S, которые вместе охватывают все линии L периметра;
- средство автоматического выбора, которое в проиллюстрированном варианте осуществления изобретения встроено в электронную систему SE, соединенную со средством обнаружения, с доступом к записанным изображениям, и настроенную на автоматический выбор, в ответ на приблизительное определение местоположения, одного или нескольких записанных изображений, в том числе изображений, соответствующих моменту времени, связанному с приблизительным определением местоположения, которые включает в себя область, где произошел отскок;
- средство V отображения для показа выбранного изображения для обеспечения его оценки путем визуального анализа; и
- средство анализа, которое в проиллюстрированном варианте осуществления встроено в электронную систему SE, и которое сконфигурировано для автоматического анализа выбранного изображения.
Следует понимать, что камеры С представлены схематически для большей ясности. В самом деле, в частности, можно было бы понять из этого схематического изображения, что камеры С, расположенные по обе стороны от центральной сетки N, смежной с ними, не перекрывают часть линий L, но на самом деле они имеют размер и/или расположение такие, что их зона охвата также включает в себя участки линий периметра в непосредственной близости от соответствующей стороны центральной сетки N.
В качестве альтернативного варианта можно бы обойтись без расположения камер рядом с сеткой N, и вместо того можно использовать одну или несколько камер С, расположенных с одной стороны корта, но на некотором расстоянии от сетки N, чей угол наблюдения обеспечивает фиксацию изображений, которые находятся за сеткой N (через, например, полупрозрачный ее участок), в частности, изображения линий L периметра другой стороны корта.
Согласно одному из предпочтительных вариантов осуществления один или предпочтительно каждый из прямоугольников С представлен не единичной камерой, а вместо этого различными камерами, например четырьмя, соединенными друг с другом и с различными углами обзора, чтобы покрыть различные участки одной линии L периметра.
Что касается сканеров S, они предпочтительно расположены на различных высотах в целях выявления различных видов объектов, в том числе некоторые на высоте, считающейся подходящей для обнаружения игроков.
Схематическое изображение на фиг. 1 не показывает связей, существующих между различными средствами системы, предложенной вторым объектом изобретения, либо потому, что они являются беспроводными, либо для того, чтобы обеспечить большую ясность иллюстрации. Следует понимать, что любой тип связи между этими средствами возможен.
Также, хотя на фиг. 1 электронная система SE показана только схематично, для других вариантов осуществления, которые не проиллюстрированы, система согласно второму объекту изобретения содержит встроенные одну или несколько электронных систем, соответствующих одному или нескольким средствам записи, выбора и анализа вышеупомянутых изображений, а также средству управления лазерными сканерами L и камерами С.
На фиг. 1 также показан экран как средство V отображения, которое отображает изображение, где теннисный мяч В появляется деформированным, когда отскакивает от периферийной линии L, где упомянутое изображение, если оно соответствует максимальной деформации мяча В, будет изображением, которое будет автоматически анализироваться и/или показываться игроку или судье на упомянутом экране V для его визуального просмотра.
Для предпочтительного варианта осуществления каждый из элементов, показанных позицией S на фиг. 1, включает в себя три лазерных сканера, как показано на фиг. 2, один из них S1 расположен на уровне земли (или очень близко к ней) или первом уровне, и два других S2, S3 расположены на определенной высоте от первого сканера, или втором уровне, примерно на 80 см для сканера S2 и 90 см для сканера S3 (хотя эти высоты могут быть и иными для других вариантов осуществления).
Фиг. 2 иллюстрирует траекторию следования теннисного мяча В до его отскока (перемещение по стрелке D1) от одной из линий L периметра, и от момента его отскока (перемещение по стрелке D2) от нее, мяч показан сплошной линией в момент отскока и пунктирной линией для остальной части его траектории от отскока.
Далее, как видно на фиг. 2, во время движения мяча В по траектории в направлении отскока, сначала его обнаруживает лазерный сканер S3 и сразу же затем S2, при этом такие последовательные обнаружения представляют прохождение движущегося объекта, который система обнаружения и распознавания идентифицирует, как теннисный мяч (как описано в предыдущем разделе). Эти сканеры S2 и S3 работают, согласно одному варианту осуществления, на скорости сканирования 100 МГц, и обеспечивают предварительное определение первой приблизительной зоны или предварительной зоны, где упадет мяч В, с размерами на уровне земли порядка 50 см.
Следуя по траектории D1, теннисный мяч В в конце концов попадает в зону покрытия сканера S1, который, согласно одному варианту осуществления, работает на частоте приблизительно 50 МГц, что, принимая во внимание среднюю скорость, с которой мяч В, как правило, перемещается, позволяет S1 выполнить около двух или трех его определений местоположения (вышеупомянутых приблизительных определений местоположения), в момент отскока и/или перед и/или сразу после него, на площади размерами около 15 см максимум, которая хоть и является относительно небольшой, не может обеспечить определение того, произошел ли отскок на линии L периметра, и, соответственно, используется это приблизительное определение местоположения, как уже говорилось выше, чтобы выбрать изображение или изображения, снятые камерами в тот же момент или моменты времени.
Как пояснено в предыдущем разделе, вышеупомянутое предварительное определение зоны, в которой мяч В отскочит, может быть использовано для выбора и, если необходимо, активации камеры, лучше всего расположенной, чтобы покрыть эту область, и, следовательно, выполнить ее механическое микро-фокусирование, если требуется обеспечить большую скорость и точность в качестве окончательной реакции, т.е. в результате анализа того, отскочил мяч В внутри или снаружи игровой зоны.
Все эти действия происходят за миллисекунды, и время имеет решающее значение для активации камеры и механического фокусирования на зоне отскока, если необходимо, и, следовательно, для обеспечения выполнения анализа выбранного изображения практически в реальном времени с высоким разрешением без помощи мега-камер, т.е. очень дорогих камер системы «ястребиный глаз».
Сканер S1 в своих различных точках обнаружения до отскока, во время отскока и сразу после него определяет примерную зону отскока гораздо более точным способом, чем зону, ранее определенную S2 и S3, но, прежде всего, он выдает информацию о моменте отскока и смежных моментах, что позволяет системе оптимизировать свой выбор, с тем, чтобы иметь возможность работать практически в режиме реального времени с информацией от выбранной высокоскоростной камеры и, таким образом, достигать, благодаря механической фокусировке, ошибки максимум в полмиллиметра по сравнению с 3 миллиметрами системы «ястребиный глаз».
На фиг. 3 показана система в соответствии со вторым объектом изобретения, включающая в себя те же элементы, что и система, показанная на фиг. 1, но применительно к обнаружению отскока теннисного мяча В от некоторых мишеней А1-А8, распределенных по всему корту в игровых зонах, в частности, в показанных зонах Z1-Z6 или даже одновременно в двух зонах, как это имеет место в случае с мишенью А4 в зонах Z4 и Z6. Очевидно, что иллюстрация является только схематической, и одна подвижная мишень может быть использована в различных положениях.
Согласно одному варианту осуществления мишени А1-А8 не будут видны на самом теннисном корте, однако будут виртуальные мишени (или одна подвижная мишень, занимающая различные проиллюстрированные положения), видимые на экране, который показывает их по отношению к теннисному корту, т.е. показывает, например, теннисный корт с мишенями, как показано на фиг. 3, или его часть (например, те, которые размещены на стороне, на которой игрок должен принять мяч).
Также, хотя на фиг. 1 только схематично показана электронная система SE, для других вариантов осуществления изобретения (не показано) система согласно второму объекту изобретения содержит одну или несколько электронных систем одного или нескольких вышеупомянутых средств записи, выбора и анализа изображений, а также средство управления лазерными сканерами L и камерами С.
На фиг. 3 также показана электронная система SE и экран как средство V отображения, которое отображает изображение, где теннисный мяч В является деформированным, когда отскакивает от одной из мишеней, особенно мишени А1, которое будет изображением, которое будет автоматически анализироваться и/или показываться игроку или судье на упомянутом экране V для его визуального просмотра.
Варианты осуществления, описанные со ссылкой на фиг. 1, также действительны для описания аналогичных вариантов осуществления со ссылкой на фиг. 3, с простым изменением компонента, от которого происходит отскок мяча В, которым на фиг. 1 является линия L периметра, а на фиг. 3 является мишень А1-А8 (очевидно, то же самое можно сказать про другой вид компонента, отличный от линии L периметра или мишеней А1-А8).
Специалист в данной области может внести изменения и модификации в описанные варианты осуществления в пределах объема изобретения, как определено в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЯ МАТЕРИАЛЬНОГО ОБЪЕКТА ПРИ ПРОВЕДЕНИИ СПОРТИВНЫХ СОСТЯЗАНИЙ ИЛИ В ТРЕНИРОВОЧНОМ ПРОЦЕССЕ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО И ТВОРЧЕСКОГО ПОТЕНЦИАЛА СПОРТСМЕНОВ | 2002 |
|
RU2254895C2 |
| ТЕННИСНЫЙ СТОЛ | 2016 |
|
RU2655185C2 |
| СПОРТИВНАЯ ИГРА С МЯЧОМ "СОЛНЕЧНЫЙ КРУГ" (ЕЕ ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ | 1999 |
|
RU2159140C2 |
| СПОСОБ И СРЕДСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ВИЗУАЛЬНОГО КОНТРОЛЯ ПОПАДАНИЯ МЯЧА НА ГРАНИЦУ ИГРОВОГО ПОЛЯ | 2010 |
|
RU2441962C1 |
| Установка для тренировок в различных видах спорта с мячом | 2017 |
|
RU2675922C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТРАБОТКИ СПОРТИВНЫХ НАВЫКОВ | 2008 |
|
RU2468846C2 |
| Устройство для телеигры | 1979 |
|
SU882534A1 |
| КОРТ | 1996 |
|
RU2100040C1 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2020 |
|
RU2746986C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПАДЕНИЯ МЯЧА НА ПЛОЩАДКУ | 2001 |
|
RU2215565C2 |
Изобретение относится к определению факта столкновения сферического элемента с компонентом игрового поля или расположения на нем или вблизи него. Техническим результатом является повышение точности определения местоположения столкновения сферического элемента с мишенью. Способ включает получение изображения зоны наблюдения поля, которое охватывает, по меньшей мере, часть упомянутого компонента, например, ограничительную линию периметра игровой зоны или мишень; выполнение приблизительного определения местоположения столкновения сферического элемента по отношению к этому компоненту или вблизи него, системой обнаружения и распознавания объекта, которая может различить, когда обнаруженный объект действительно является сферическим элементом; автоматический выбор одного из изображений, полученного для этого же момента времени, и включающего в себя зону, где произошло упомянутое столкновение; и анализ выбранного изображения для проверки, действительно или нет сферический элемент столкнулся с компонентом. 2 н. и 22 з.п. ф-лы, 3 ил.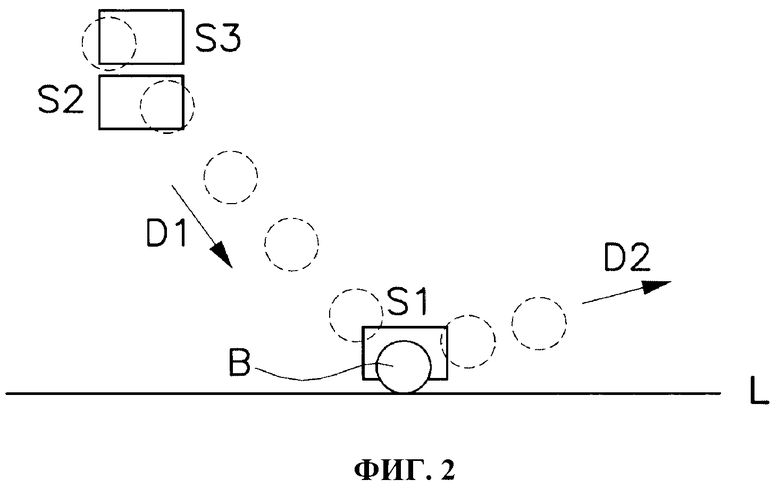
1. Способ для определения факта столкновения сферического элемента с компонентом игрового поля или с компонентом, расположенным на упомянутом игровом поле или вблизи упомянутого игрового поля, при этом упомянутое игровое поле образовано из игровых зон (Z1-Z10), причем способ включает:
a) получение последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, охватывающей, по меньшей мере, часть, по меньшей мере, упомянутого компонента;
b) выполнение приблизительного определения местоположения столкновения сферического элемента с упомянутым компонентом или вблизи него;
c) автоматический выбор в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени, при этом изображение включает в себя зону, где произошло упомянутое столкновение; и
d) анализ упомянутого, по меньшей мере, одного выбранного изображения для проверки, действительно ли сферический элемент столкнулся с упомянутым компонентом;
при этом
- упомянутое приблизительное определение местоположения выполняется с помощью системы обнаружения и распознавания трехмерного объекта, которая может автоматически различить, когда обнаруженный объект действительно является сферическим элементом; и
- до упомянутого приблизительного определения местоположения на этапе b) и на большей высоте, чем высота упомянутого приблизительного определения местоположения, выполняется предварительное обнаружение прохождения сферического элемента через, по меньшей мере, две точки, расположенные на различных высотах, и на основе упомянутого предварительного обнаружения выполняются прогнозы траектории, по которой следует сферический элемент к земле, а также предварительное обнаружение или предварительное определение приблизительной зоны, где произойдет столкновение или отскок, при этом упомянутое предварительное обнаружение выполняется с использованием, по меньшей мере, двух расположенных на различных высотах устройств обнаружения из состава упомянутой системы обнаружения и распознавания трехмерного объекта.
2. Способ по п. 1, в котором система обнаружения и распознавания трехмерного объекта содержит устройства обнаружения, которые представляют собой лазерные сканеры, а способ включает выполнение упомянутого автоматического распознавания с использованием упомянутых лазерных сканеров для получения информации о расстоянии от упомянутых лазерных сканеров до каждой точки контакта лазерных лучей, излученных лазерными сканерами, с обнаруженным объектом, и на основе упомянутой информации о расстоянии, полученной для группы точек контакта.
3. Способ по п. 1, включающий определение того, отскочил ли сферический элемент внутри или снаружи упомянутых игровых зон (Z1-Z10), причем игровые зоны (Z1-Z10) разграничены линиями (L) периметра, при этом:
упомянутый этап а) включает получение последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, охватывающей, по меньшей мере, часть, по меньшей мере, одной из упомянутых линий (L) периметра;
упомянутый этап b) включает выполнение приблизительного определения местоположения отскока сферического элемента на одной из упомянутых линий (L) периметра или вблизи нее, при этом упомянутая линия (L) периметра образует вышеупомянутый компонент игрового поля, а упомянутый отскок образуется упомянутым столкновением;
упомянутый этап с) включает автоматический выбор, в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени и включающего в себя зону, где происходил упомянутый отскок; и
упомянутый этап d) включает анализ по просьбе игрока или арбитра, или автоматически после выбора этапа с), по меньшей мере, одного выбранного изображения, для проверки, действительно ли сферический элемент отскочил на упомянутой линии (L) периметра или нет, чтобы определить, что сферический элемент отскочил внутри или снаружи игровой зоны, ограниченной упомянутой линией (L) периметра, на этапе b).
4. Способ по п. 1, в котором упомянутый элемент игрового поля представляет собой мишень (А1-А8), расположенную, по меньшей мере, в одной из упомянутых игровых зон (Z1-Z10), которые ограничены линиями (L) периметра, при этом:
упомянутый этап а) включает получение последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, охватывающей, по меньшей мере, часть упомянутой мишени (А1-А8);
упомянутый этап b) включает выполнение приблизительного определения местоположения отскока сферического элемента от упомянутой, по меньшей мере, одной мишени (А1-А8) или вблизи нее;
упомянутый этап с) включает автоматический выбор, в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения из упомянутой последовательности изображений, полученного для этого же момента времени и включающего в себя зону, где происходил упомянутый отскок; и
упомянутый этап d) включает анализ по просьбе игрока или арбитра, или автоматически после выбора этапа с), выбранного изображения, по меньшей мере, одно из которых служит для проверки, действительно ли сферический элемент отскочил от мишени (А1-А8), как было определено на этапе b).
5. Способ по п. 1, в котором упомянутое приблизительное определение местоположения на этапе b) включает выполнение, по меньшей мере, двух определений местоположения, которые включают в себя, по меньшей мере, момент времени, когда произошло упомянутое столкновение или отскок и/или, по меньшей мере, момент времени непосредственно перед столкновением или отскоком и/или, по меньшей мере, момент времени непосредственно после столкновения или отскока, используемый на упомянутом этапе с), как точка отсчета времени для автоматического выбора упомянутого, по меньшей мере, одного изображения, по меньшей мере, одного из моментов времени для упомянутых, по меньшей мере, двух определений местоположения.
6. Способ по п. 1, в котором упомянутый этап d) включает показ упомянутого, по меньшей мере, одного выбранного изображения на средстве отображения, с тем, чтобы обеспечить выполнение вышеупомянутого анализа путем визуального рассмотрения изображения, или в добавление к упомянутому анализу.
7. Способ по п. 1, отличающийся тем, что упомянутый этап с) включает выбор множества изображений, расположенных в последовательности, которая включает в себя изображение, полученное для этого же момента времени, когда произошло приблизительное определение местоположения, и изображения для моментов времени до и после этого момента, и
упомянутый этап d) включает воспроизведение видео, включающего в себя упомянутое множество изображений, в замедленном режиме вперед и/или назад и/или с остановкой для выполнения вышеупомянутого визуального определения.
8. Способ по п. 4, включающий выполнение упомянутого этапа а) путем использования множества высокоскоростных камер (С), покрывающих различные компоненты игрового поля или расположенных на нем или вблизи него с различных его сторон, и/или различные участки линий (L) периметра с двух сторон и/или концов и/или все мишени (А1-А8) с различных сторон игрового поля.
9. Способ по п. 1, включающий использование упомянутого предварительного определения упомянутой приблизительной зоны, где произойдет отскок, для активации и/или управления одной или более высокоскоростных камер, чья зона покрытия включает в себя приблизительную предварительно определенную зону.
10. Способ по п. 1, включающий автоматическое распознавание, когда обнаруженный объект действительно является сферическим элементом, на основе разницы в сигналах обнаружения, предназначенных для обнаружения системой обнаружения и распознавания, по сравнению с сигналами обнаружения, являющимися результатом обнаружения других элементов, стационарных или мобильных, по меньшей мере, различных форм и размеров.
11. Способ по п. 1, в котором упомянутый сферический элемент представляет собой теннисный мяч (В), а упомянутое игровое поле представляет собой теннисный корт, при этом упомянутые игровые зоны (Z1-Z10) представляют собой различные прямоугольные зоны упомянутого теннисного корта.
12. Способ по п. 4, в котором упомянутая, по меньшей мере, одна мишень (А1-А8) образована субзоной, по меньшей мере, одной из игровых зон (Z1-Z2), и отмечена физически или виртуально на земле, спроецирована на земле или на средстве отображения, видимом игроку.
13. Способ по п. 12, включающий изменение формы, размера и/или положения упомянутой мишени (А1-А8) относительно игрового поля и выполнение этапов а) - d) для определения того, отскочил ли сферический элемент от измененной мишени (А1-А8).
14. Способ по п. 12, включающий, после упомянутого этапа d), выбор другой мишени (А1-А8) и выполнение этапов а) - d) для определения того, отскочил ли сферический элемент от упомянутой другой мишени (А1-А8).
15. Способ по п. 3, в котором упомянутый сферический элемент представляет собой теннисный мяч (В), а упомянутое игровое поле представляет собой теннисный корт, при этом упомянутые игровые зоны (Z1-Z10) представляют собой различные прямоугольные зоны упомянутого теннисного корта и способ включает выбор таких линий (L) периметра, на которых проверяют, отскочил ли теннисный мяч (В) или нет:
- тех, которые выделяют соответствующую зону подачи (Z2-Z3, Z4-Z5), в которую игрок будет подавать или подал, для определения того, отскочил теннисный мяч внутри или снаружи зоны подачи (Z2-Z3, Z4-Z5); или
- тех, которые выделяют общую игровую зону для одиночного или парного матча во время обмена ударами после подачи.
16. Способ по п. 15, включающий получение информации о том, коснулся ли после подачи теннисный мяч (В) сетки (N) игрового поля или нет, и на основе этой информации, после определения того, отскочил ли теннисный мяч (В) внутри или снаружи зоны подачи, способ включает в себя выдачу сигнала, указывающего, что:
- подачу надо повторить, если мяч (В) отскочил внутри зоны подачи, но после касания сетки (N), или
- подачу не нужно повторять, если мяч (В) отскочил за пределами зоны подачи после касания сетки (N).
17. Система для определения факта столкновения сферического элемента с компонентом игрового поля или с компонентом, расположенным на упомянутом игровом поле или вблизи упомянутого игрового поля, при этом упомянутое игровое поле образовано из игровых зон (Z1-Z10), содержащая
- средство получения и записи изображений, включая, по меньшей мере, одну высокоскоростную камеру, для получения и записи последовательности изображений, по меньшей мере, одной зоны наблюдения упомянутого игрового поля, которая покрывает, по меньшей мере, часть упомянутого компонента;
- средство обнаружения для выполнения приблизительного определения местоположения столкновения сферического элемента с упомянутым компонентом или рядом с ним;
- средство автоматического выбора, соединенное с упомянутым средством обнаружения, с доступом к упомянутым записанным изображениям, для автоматического выбора, в ответ на упомянутое приблизительное определение местоположения, по меньшей мере, одного изображения упомянутой последовательности изображений, полученного для этого же момента времени, и которое включает в себя зону, где произошло упомянутое столкновение; и
- средство отображения (V) и/или анализа, включающее экран, соответственно, для отображения упомянутого, по меньшей мере, одного выбранного изображения, для обеспечения его оценки путем визуального анализа и/или для его автоматического анализа, для проверки, действительно ли сферический элемент столкнулся с упомянутым компонентом или нет;
при этом
- упомянутое средство обнаружения содержит систему обнаружения и распознавания трехмерного объекта, которая может автоматически различить, когда обнаруженный объект действительно является сферическим элементом, при этом упомянутая система обнаружения и распознавания трехмерного объекта для выполнения вышеупомянутого приблизительного определения местоположения включает в себя:
- первое устройство обнаружения, расположенное на уровне земли или вблизи нее, при этом его поле покрытия включает в себя, по меньшей мере, участок компонента и/или линии (L) периметра и/или мишени (А1-А8), от которой или рядом с которой произошел упомянутый отскок или столкновение; и
- по меньшей мере, второе и третье устройства обнаружения, расположенные в двух соответствующих точках на различных высотах выше первого устройства обнаружения, размещенные и сконфигурированные для обнаружения прохождения движущегося элемента через, по меньшей мере, две точки, расположенные на различных высотах, при этом система обнаружения и распознавания выполнена с возможностью выполнения, на основе обнаружения прохождения через упомянутые две точки, прогноза траектории следования движущегося элемента и распознавания, он является или нет сферическим элементом.
18. Система по 17, в которой упомянутая система обнаружения и распознавания трехмерного объекта включает в себя, по меньшей мере, одну трехмерную сканирующую систему, активную или пассивную, включая активную лазерную сканирующую систему (S).
19. Система по п. 17, в которой упомянутое средство получения и записи изображений содержит множество высокоскоростных камер (С), расположенных так, чтобы их зоны покрытия охватывали различные компоненты игрового поля, или расположенных на нем или вблизи него с различных сторон компонентов, и/или различные участки линий (L) периметра с двух сторон и/или концов и/или все мишени (А1-А8) с различных сторон игрового поля.
20. Система по п. 19, в которой упомянутые высокоскоростные камеры (С) расположены на уровне земли или практически на уровне земли.
21. Система по п. 19, в которой, по меньшей мере, одна из упомянутых высокоскоростных камер (С) или из других камер средства получения и записи изображения является мобильной и которая содержит мобильный робот, несущий упомянутую, по меньшей мере, одну мобильную камеру, которая включает в себя систему наблюдения, отслеживания и прогнозирования, что делает ей известными обстоятельства игры, в том числе положение в любой момент времени игроков и сферического элемента, при этом она прогнозирует, вычисляя, где сферический элемент будет сталкиваться или отскакивать, что делает робот пригодным, на основе такого знания и прогноза, для нахождения лучшего угла фиксации мобильной камеры и движется в направлении зоны, где, как ожидается, отскочит сферический элемент.
22. Система по п. 19, в которой упомянутый сферический элемент представляет собой мяч (В), а упомянутое игровое поле представляет собой теннисный корт, при этом упомянутые игровые зоны (Z1-Z10) представляют собой различные прямоугольные зоны упомянутого теннисного корта, при этом одна или несколько камер (С) расположены с каждой стороны центральной сетки (N), однако на удалении от нее, не примыкая к центральной сетке (N), причем упомянутая центральная сетка (N) имеет полупрозрачный участок, и одна или несколько камер (С) расположены так, что они имеют угол обзора через упомянутый полупрозрачный участок центральной сетки (N), который позволяет им фиксировать изображения происходящего за центральной сеткой (N).
| US 8199199 B1, 12.06.2012 | |||
| WO 2007098537 A1, 07.09.2007 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЛЮТЕНУРИНА | 2005 |
|
RU2292218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЯ МАТЕРИАЛЬНОГО ОБЪЕКТА ПРИ ПРОВЕДЕНИИ СПОРТИВНЫХ СОСТЯЗАНИЙ ИЛИ В ТРЕНИРОВОЧНОМ ПРОЦЕССЕ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО И ТВОРЧЕСКОГО ПОТЕНЦИАЛА СПОРТСМЕНОВ | 2002 |
|
RU2254895C2 |

