Изобретение относится к горной промышленности и может быть использовано для разработки месторождений полезных ископаемых при крутом падении ограниченных в плане рудных тел.
Известен способ открытой разработки месторождений полезных ископаемых, включающий вскрытие полезного ископаемого, разметку выемочного поля шестиугольниками и кругами, бурение вспомогательных скважин и выемочных скважин с выбуриванием керна большого диаметра, его отделение от массива, подъем на поверхность и извлечение из колонковой трубы полезного ископаемого [1].
Недостатками данного способа являются многооперационность и низкая производительность выемки полезных ископаемых.
Известен способ разработки кимберлитовых трубок, включающий отработку карьера до конечного контура, отработку горных пород, транспортировку ее автосамосвалами по спирали к горизонтам карьера, оборудование наклонного ствола крутонаклонным конвейерным подъемником, выемку руды комбайнами, доставку автосамосвалами к квершлагам [2].
Недостатками данного способа являются значительные по времени простои карьерного комбайна при замене автосамосвалов и простои автосамосвалов под погрузкой и в ожидании погрузки, необходимость строительства наклонного ствола для размещения конвейера, значительное количество перегрузочных операций.
Наиболее близким по технологической сущности является способ отработки карьеров в условиях больших глубин с применением углубочного комплеса [3]. Углубочный комплекс включает специализированный одноковшовый экскаватор и гусеничные автосамосвалы. В данном способе порода, вынутая одноковшовым экскаватором, грузится в гусеничные автосамосвалы и транспортируется по дорогам с продольными уклонами до 30% к перегрузочному пункту, откуда колесными автосамосвалами по дорогам с уклонами до 10% перемещается на фабрику.
Недостатками данного способа является то, что специализированный одноковшовый экскаватор без предварительной подготовки массива может разрабатывать горные породы лишь малой прочности, при этом движение транспорта по дорогам с большими продольными уклонами снижает безопасность ведения работ, а большая глубина и малая площадь углубочной зоны затрудняют проветривание нижней части карьера, что ведет к высокой загазованности и ухудшению условий труда горняков.
Технический результат заключается в повышении производительности, надежности и расширении технологической эффективности ведения добычных работ.
Технический результат достигается тем, что в способе разработки крутопадающих месторождений твердых полезных ископаемых с отработкой карьера двумя очередями, первая очередь - с транспортировкой горной массы колесными автосамосвалами на уклонах до 10%, вторая очередь - углубочная зона карьера начинает отрабатываться с реконструкции нижней части первой очереди карьера с формированием перегрузочного пункта и последующей отработки углубочной зоны карьера с применением углубочного комплекса, при этом транспортировка получаемой горной массы осуществляется специализированными транспортными средствами углубочного комплекса на уклоне до 30%, фрезерная машина углубочного комплекса осуществляет рыхление породы в забое углубочной зоны карьера, с размещением разрыхленной горной массы в траншее для последующей выемки горной массы гусеничными скреперами углубочного комплекса, следующими вслед за фрезерной машиной без ее остановки, при этом управление фрезерной машиной и гусеничными скреперами осуществляется с помощью системы дистанционного управления углубочного комплекса, оборудованной операционной системой с элементами контроля и фиксации функционального исполнения и перемещения фрезерной машины и гусеничных скреперов, при этом пульт управления системы дистанционного управления и пункт технического обслуживания углубочного комплекса располагаются в нижней части первой очереди карьера, при этом операционная система фиксирует участок забоя с разрыхленной горной массой, подготовленной к выемке, подается сигнал на систему управления гусеничным скрепером с указанием участка выемки разрыхленной горной массы и рациональной траектории движения, а датчики контроля местоположения операционной системы обеспечивают безопасность перемещения фрезерной машины и гусеничных скреперов в углубочной зоне карьера.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Способ разработки крутопадающих месторождений твердых полезных ископаемых с использованием углубочного комплекса изображен на чертеже.
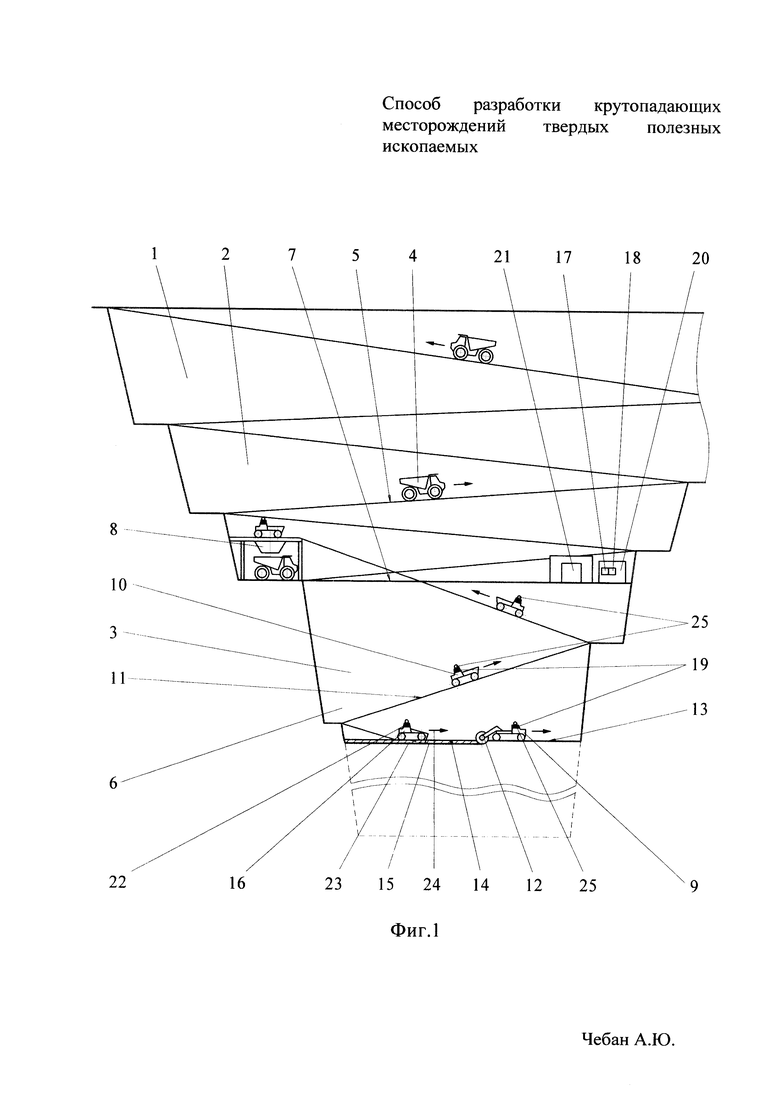
На фиг. 1 - схема отработки углубочной зоны карьера с применением углубочного комплекса.
Способ разработки крутопадающих месторождений твердых полезных ископаемых включает отработку карьера 1 двумя очередями 2, 3. Первая очередь 2 - транспортировкой горной массы колесными автосамосвалами 4, имеет уклон от 5 до 10%. Вторая очередь 3 - углубочная зона карьера 6 включает нижнюю часть 7 первой очереди 2 карьера 1 с перегрузочным пунктом 8. В углубочной зоне карьера 6 размещается углубочный комплекс 9 с транспортировкой горной массы специализированными транспортными средствами 10 углубочного комплекса 9 на уклоне от 11 до 30%. Фрезерная машина 12 углубочного комплекса 9 позиционируется в забое 13 углубочной зоны карьера 6. Разрыхленная горная масса 14 размещается в траншее 15. Гусеничные скреперы 16 углубочного комплекса 9 располагаются в углубочной зоне карьера 6. Система дистанционного управления 17 углубочного комплекса 9 оборудована операционной системой 18 с элементами контроля и фиксации функционального исполнения и перемещения 19 фрезерной машины 12 и гусеничных скреперов 16. Пульт управления 20 системы дистанционного управления 17 и пункт технического обслуживания 21 углубочного комплекса 9 располагаются в нижней части 7 первой очереди 2 карьера 1. Система дистанционного управления 17 связана с системой управления гусеничным скрепером 22, на которую подается сигнал с указанием участка 23 выемки разрыхленной горной массы 14 и рациональной траектории движения 24. Датчики контроля местоположения 25 операционной системы 18 обеспечивают безопасность перемещения фрезерной машины 12 и гусеничных скреперов 16 в углубочной зоне карьера 6.
Способ разработки крутопадающих месторождений твердых полезных ископаемых осуществляется следующим образом.
Отработка карьера 1 ведется двумя очередями 2, 3. Первая очередь 2 - транспортировкой горной массы колесными автосамосвалами 4 на уклонах от 5 до 10%. Вторая очередь 3 - углубочная зона карьера 6 начинает отрабатываться с реконструкции нижней части 7 первой очереди 2 карьера 1 с формированием перегрузочного пункта 8 и последующей отработки углубочной зоны карьера 6 с применением углубочного комплекса 9. Транспортировка получаемой горной массы осуществляется специализированными транспортными средствами 10 углубочного комплекса 9 на уклоне от 11 до 30%. Фрезерная машина 12 углубочного комплекса 9 осуществляет рыхление породы в забое 13 углубочной зоны карьера 6, с размещением разрыхленной горной массы 14 в траншее 15 для последующей выемки горной массы гусеничными скреперами 16 углубочного комплекса 9, следующими вслед за фрезерной машиной 12 без ее остановки. Управление фрезерной машиной 12 и гусеничными скреперами 16 осуществляется с помощью системы дистанционного управления 17 углубочного комплекса 9, оборудованной операционной системой 18 с элементами контроля и фиксации функционального исполнения и перемещения 19 фрезерной машины 12 и гусеничных скреперов 16. Пульт управления 20 системы дистанционного управления 17 и пункт технического обслуживания 21 углубочного комплекса 9 располагаются в нижней части 7 первой очереди 2 карьера 1. Операционная система 18 фиксирует участок 23 забоя 13 с разрыхленной горной массой 14, подготовленной к выемке. Подается сигнал на систему управления гусеничным скрепером 22 с указанием участка 23 выемки разрыхленной горной массы 14 и рациональной траектории движения 24. Датчики контроля местоположения 25 операционной системы 18 обеспечивают безопасность перемещения фрезерной машины 12 и гусеничных скреперов 16 в углубочной зоне карьера 6.
Способ повышает производительность, надежность, расширяет технологическую эффективность ведения добычных работ, обеспечивает уменьшение объема вскрышных работ и повышает безопасность ведения горных работ посредством системы дистанционного управления углубочным комплексом.
Источники информации
1. Патент РФ №2465461 от 27.10.2012. Способ открытой разработки месторождений полезных ископаемых.
2. Патент РФ №2196895 от 20.01.2003. Способ разработки кимберлитовых трубок.
3. Тарасов П.И., Журавлев А.Г., Фурин В.О. Обоснование технологических параметров углубочного комплекса // Горное оборудование и электромеханика. 2011. №9. С. 2-10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ КРУТОПАДАЮЩИХ РУДНЫХ ТЕЛ | 2014 |
|
RU2571776C1 |
| СПОСОБ КОМБИНИРОВАННОЙ РАЗРАБОТКИ ВЫТЯНУТЫХ МЕСТОРОЖДЕНИЙ КРУТОПАДАЮЩИХ ЗАЛЕЖЕЙ | 2013 |
|
RU2515649C1 |
| Способ комбинированной разработки месторождений твердых полезных ископаемых | 2017 |
|
RU2653213C1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ | 2010 |
|
RU2464422C2 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ КРУТОПАДАЮЩИХ МЕСТОРОЖДЕНИЙ | 2005 |
|
RU2294434C1 |
| СПОСОБ ДОРАБОТКИ КАРЬЕРА С ДВУМЯ БЛИЗКОРАСПОЛОЖЕННЫМИ РУДНЫМИ ТЕЛАМИ | 2013 |
|
RU2540735C1 |
| Способ доработки подкарьерных запасов высоким вертикальным уступом | 2019 |
|
RU2698926C1 |
| СПОСОБ РЕКОНСТРУКЦИИ КАРЬЕРА С ДВУМЯ БЛИЗКОРАСПОЛОЖЕННЫМИ РУДНЫМИ ТЕЛАМИ | 2006 |
|
RU2314420C1 |
| Способ открытой разработки месторождения полезных ископаемых с применением фрезерных комбайнов | 2022 |
|
RU2790308C1 |
| СПОСОБ ВЕДЕНИЯ ВСКРЫШНЫХ И ДОБЫЧНЫХ РАБОТ С ПРИМЕНЕНИЕМ КАРЬЕРНЫХ КОМБАЙНОВ ФРЕЗЕРНОГО ТИПА И СКРЕПЕРОВ | 2006 |
|
RU2317415C1 |
Изобретение относится к горной промышленности и может быть использовано для разработки месторождений полезных ископаемых при крутом падении ограниченных в плане рудных тел.
Техническим результатом является повышение производительности, надежности, расширение технологической эффективности ведения добычных работ, обеспечение уменьшения объема вскрышных работ и повышение безопасности ведения горных работ посредством системы дистанционного управления углубочным комплексом. Способ разработки крутопадающих месторождений твердых полезных ископаемых, включающий фрезерную машину углубочного комплекса, осуществляющую рыхление породы в забое углубочной зоны карьера, с размещением разрыхленной торной массы в траншее для последующей выемки горной массы гусеничными скреперами углубочного комплекса, следующими вслед за фрезерной машиной без ее остановки. При этом управление фрезерной машиной и гусеничными скреперами осуществляется с помощью системы дистанционного управления углубочного комплекса, оборудованной операционной системой с элементами контроля и фиксации функционального исполнения и перемещения фрезерной машины и гусеничных скреперов. При этом пульт управления системы дистанционного управления и пункт технического обслуживания углубочного комплекса располагаются в нижней части первой очереди карьера, при этом операционная система фиксирует участок забоя с разрыхленной горной массой, подготовленной к выемке, подается сигнал на систему управления гусеничным скрепером с указанием участка выемки разрыхленной горной массы и рациональной траектории движения, а датчики контроля местоположения операционной системы обеспечивают безопасность перемещения фрезерной машины и гусеничных скреперов в углубочной зоне карьера. 1 ил.
Способ разработки крутопадающих месторождений твердых полезных ископаемых с отработкой карьера двумя очередями, первая очередь - с транспортировкой горной массы колесными автосамосвалами на уклонах до 10%, вторая очередь - углубочная зона карьера начинает отрабатываться с реконструкции нижней части первой очереди карьера с формированием перегрузочного пункта и последующей отработки углубочной зоны карьера с применением углубочного комплекса, при этом транспортировка получаемой горной массы осуществляется специализированными транспортными средствами углубочного комплекса на уклоне до 30%, отличающийся тем, что фрезерная машина углубочного комплекса осуществляет рыхление породы в забое углубочной зоны карьера, с размещением разрыхленной горной массы в траншее для последующей выемки горной массы гусеничными скреперами углубочного комплекса, следующими вслед за фрезерной машиной без ее остановки, при этом управление фрезерной машиной и гусеничными скреперами осуществляется с помощью системы дистанционного управления углубочного комплекса, оборудованной операционной системой с элементами контроля и фиксации функционального исполнения и перемещения фрезерной машины и гусеничных скреперов, при этом пульт управления системы дистанционного управления и пункт технического обслуживания углубочного комплекса располагаются в нижней части первой очереди карьера, при этом операционная система фиксирует участок забоя с разрыхленной горной массой, подготовленной к выемке, подается сигнал на систему управления гусеничным скрепером с указанием участка выемки разрыхленной горной массы и рациональной траектории движения, а датчики контроля местоположения операционной системы обеспечивают безопасность перемещения фрезерной машины и гусеничных скреперов в углубочной зоне карьера.
| ТАРАСОВ П.И | |||
| И ДР., Обоснование технологических параметров углубочного комплекса, Горное оборудование и электромеханика, N 9, 2011, с.2-10 | |||
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2014 |
|
RU2558051C1 |
| СПОСОБ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ПРИМЕНЕНИЕМ ЗЕМЛЕРОЙНО-ФРЕЗЕРНОЙ МАШИНЫ И СКРЕПЕРОВ | 2014 |
|
RU2555181C1 |
| WO 2011105906 A2, 01.09.2011. | |||

