Изобретение относится к горной промышленности и может быть использовано при выполнении вскрышных и добычных работ на месторождениях, сложенных из плотных и полускальных пород, с применением землеройно-фрезерных машин и комбинированного карьерного транспорта.
Известен способ использования фрезерных комбайнов в комплекте с автосамосвалами, при этом комбайн фрезерует породу и конвейером подает горную массу в кузов автосамосвала [1].
Недостатками данного способа являются значительные по времени простои фрезерного комбайна при замене автосамосвалов и простои автосамосвалов под погрузкой и в ожидании погрузки.
Известен способ ведения вскрышных и добычных работ с применением карьерных комбайнов фрезерного типа и скреперов [2]. В данном способе порода, разрыхленная фрезерным комбайном, конвейером сбрасывается в траншею, из которой осуществляют ее зачерпывание скреперами, идущими вслед за комбайном без остановки самого комбайна.
В данном способе не используются все функциональные возможности дорогостоящего фрезерного комбайна. Кроме того, применение скреперов традиционной конструкции не обеспечивает загрузки скреперных ковшей с высоким коэффициентом наполнения. Это снижает эффективность ведения горных работ.
Наиболее близкими по технической сущности являются способ разработки месторождений твердых полезных ископаемых с применением землеройно-фрезерной машины и скреперов [3] и способ подготовки и транспортировки горной массы при разработке глубокозалегающих месторождений и автоматизированный комплекс для его осуществления [4]. В способе [3] землеройно-фрезерная машина используется для разрыхления породы, с размещением отфрезерованной горной массы в отрытой траншее. Выемку горной массы из траншеи осуществляют скрепером, следующим вслед за землеройно-фрезерной машиной, без ее остановки, при этом используется гребковая стенка для перемещения горной массы в заднюю часть ковша скрепера и загрузочный лоток. В способе [4], включающем размещение автоматизированного комплекса с помощью ходового оборудования в рабочей зоне загрузки автосамосвалами горной массы, установку сопрягаемого с автоматизированным комплексом конвейера, осуществляется независимое позиционирование под загрузку горной массы, установленных с двух сторон рамы, с возможностью независимого друг от друга поворота, приемных емкостей в виде ковшей с днищем и стенками.
Использование автосамосвалов в сопряжении с автоматизированным комплексом разгрузки экономически нецелесообразно при транспортировке горной массы с ближних участков месторождения.
Технический результат заключается в повышении эффективности разработки месторождений за счет дифференцирования карьера на участки для осуществления транспортировки горной массы с ближних участков посредством скреперов, а с дальних - посредством автосамосвалов, обеспечения независимой разгрузки горной массы и усовершенствования процесса разгрузки скреперов за счет их конструктивного исполнения, обеспечивающего поворот ковша в вертикальной плоскости.
Технический результат достигается тем, что в способе комбинированной разработки месторождений твердых полезных ископаемых, включающем использование сопрягаемого с конвейером автоматизированного комплекса с приемными емкостями, землеройно-фрезерных машин для разрыхления породы с размещением горной массы в траншеях, из которых осуществляют ее выемку и транспортировку с ближних участков - скреперами с тяговой рамой, ковшом с днищем, боковыми и задней стенками, смонтированными на внешних сторонах боковых стенок направляющими для обеспечения перемещения элементов конструкции для зачерпывания горной массы, а с дальних участков - посредством погрузчиков и автосамосвалов, согласно изобретению рыхление, выемка, погрузка, транспортировка и разгрузка горной массы осуществляется с помощью автоматической системы управления для функционального обеспечения процессов рационального рыхления, выемки, погрузки, перемещения скреперов и автосамосвалов к приемным емкостям автоматизированного комплекса, сопрягаемого с конвейером, и независимой разгрузки горной массы из скреперов и автосамосвалов в приемные емкости, при этом повышение эффективности операций обеспечивается посредством гравитационной разгрузки ковша скрепера после контакта с приемной емкостью автоматизированного комплекса при заезде задних колес скрепера в приемную емкость и последующего поворота ковша скрепера в вертикальной плоскости с помощью шарнирной связи и гидроцилиндров, установленных на тяговой раме, связанной с осью задних колес, а наполнение ковша скрепера и автосамосвала горной массой фиксируется с помощью датчиков автоматической системы управления.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Способ комбинированной разработки месторождений твердых полезных ископаемых изображен на чертежах.
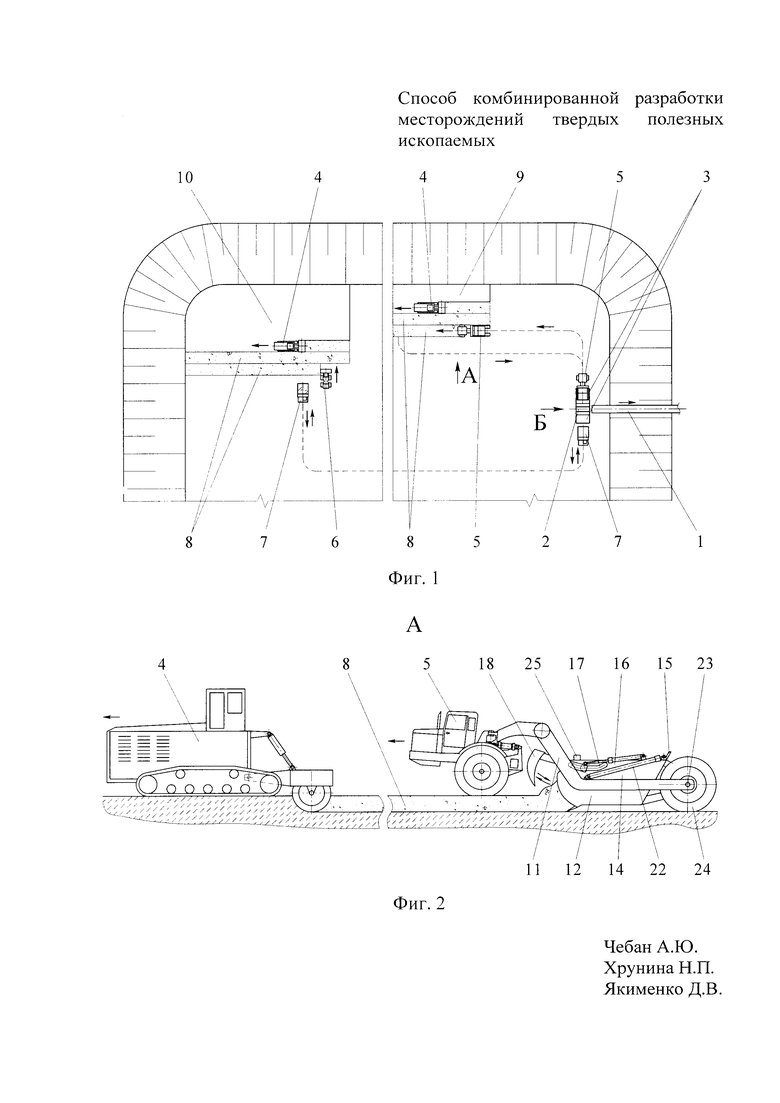
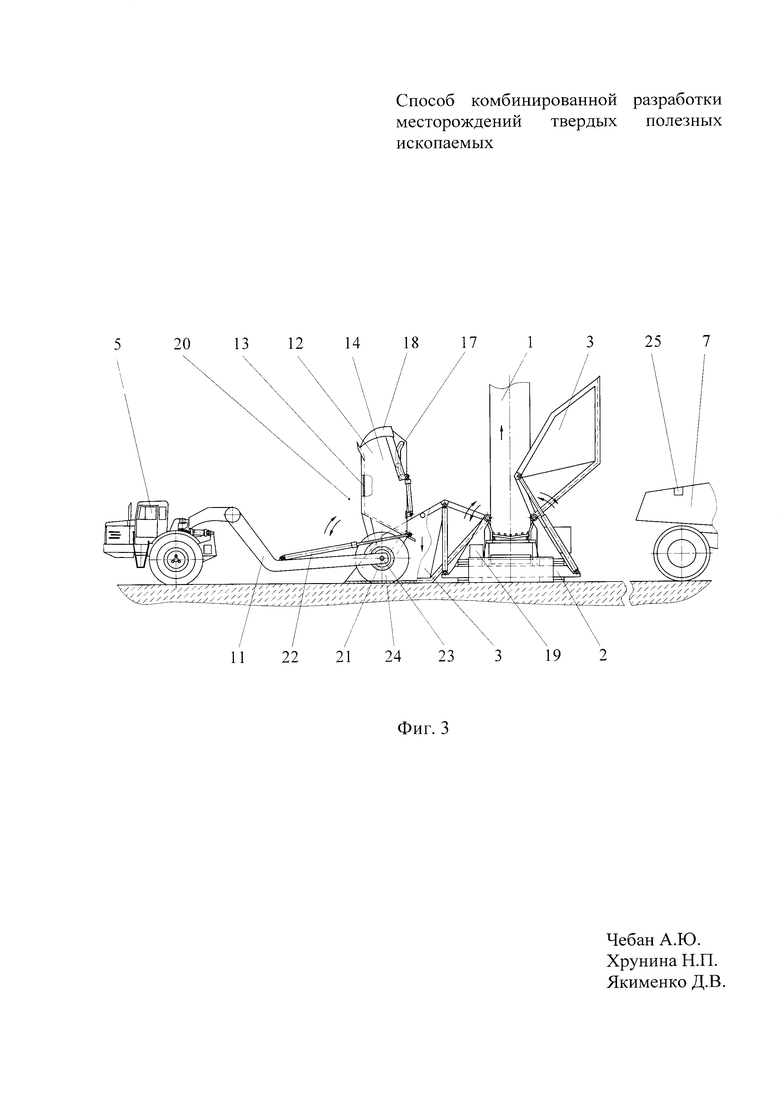
На фиг. 1 - схема разработки месторождения; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Способ комбинированной разработки месторождений твердых полезных ископаемых выполняется с помощью сопрягаемого с конвейером 1 автоматизированного комплекса 2 с приемными емкостями 3, а также землеройно-фрезерных машин 4, скреперов 5, погрузчиков 6 и автосамосвалов 7. Выемка и транспортировка горной массы из траншей 8 с ближних участков 9 осуществляется скреперами 5, а с дальних участков 10 - погрузчиками 6 и автосамосвалами 7. Скреперы 5 включают тяговую раму 11, ковш 12 с днищем 13, боковые стенки 14 и заднюю стенку 15, смонтированные на внешних сторонах 16 боковых стенок 14 направляющие 17 для обеспечения перемещения элементов конструкции 18 для зачерпывания горной массы. Управление процессами рыхления, выемки, погрузки, транспортировки и разгрузки горной массы осуществляется с помощью автоматической системы управления 19 для функционального обеспечения процессов. Независимая разгрузка горной массы из скреперов 5 и автосамосвалов 7 в приемные емкости 3 обеспечивается использованием автоматизированного комплекса 2. При разгрузке скрепера 5 ковш 12 поворачивается в вертикальной плоскости 20 с помощью шарнирной связи 21 и гидроцилиндров 22, установленных на тяговой раме 11, связанной с осью 23 задних колес 24. Скреперы 5 и автосамосвалы 7 оснащены датчиками 25 автоматической системы управления 19, которые фиксируют их наполнение горной массой.
Способ комбинированной разработки месторождений твердых полезных ископаемых осуществляется следующим образом.
Одновременно на ближних участках 9 и дальних участках 10 с помощью землеройно-фрезерных машин 4 осуществляют разрыхление породы с размещением горной массы в траншеях 8, из которых осуществляют ее выемку и транспортировку с ближних участков 9 - скреперами 5 с тяговой рамой 11, ковшом 12 с днищем 13, боковыми и задней стенками 14, 15, смонтированными на внешних сторонах 16 боковых стенок 14 направляющими 17 для обеспечения перемещения элементов конструкции 18 для зачерпывания горной массы, а с дальних участков 10 - посредством погрузчиков 6 и автосамосвалов 7. Рыхление, выемка, погрузка, транспортировка и разгрузка горной массы осуществляется с помощью автоматической системы управления 19 для функционального обеспечения процессов рационального рыхления, выемки, погрузки, перемещения скреперов 5 и автосамосвалов 7 к приемным емкостям 3 автоматизированного комплекса 2, сопрягаемого с конвейером 1. Осуществляется независимая разгрузка горной массы из скреперов 5 и автосамосвалов 7 в приемные емкости 3. Повышение эффективности операций обеспечивается посредством гравитационной разгрузки ковша 12 скрепера 5. После контакта с приемной емкостью 3 автоматизированного комплекса 2 при заезде задних колес 24 скрепера 5 в приемную емкость 3 и последующего поворота ковша 12 скрепера 5 в вертикальной плоскости 20 с помощью шарнирной связи 21 и гидроцилиндров 22, установленных на тяговой раме 11, связанной с осью 23 задних колес 24, осуществляется разгрузка горной массы. Наполнение ковша 12 скрепера 5 и автосамосвала 7 горной массой фиксируется с помощью датчиков 25 автоматической системы управления 19. Далее горная масса с помощью конвейера 1 подается на переработку.
Способ повышает производительность, надежность и расширяет технологическую эффективность ведения работ за счет дифференцирования участков, при этом с ближних участков транспортировка горной массы осуществляется скреперами, а с дальних - автосамосвалами, с обеспечением независимой разгрузки скреперов и автосамосвалов в приемные емкости автоматизированного комплекса.
Источники информации
1. Пихлер М., Гуськов В.А., Панкевич Ю.Б., Галигузов О.А., Галигузов О.М. Комбайны Wirtgen 2500 SM в карьерах Липецкого карьероуправления ОАО «Липецкцемент» // Горная промышленность. - 2008. - №4. - С. 26-30.
2. Патент РФ №2317415 от 20.02.2008. Способ ведения вскрышных и добычных работ с применением карьерных комбайнов фрезерного типа и скреперов.
3. Патент РФ №2555181 от 10.07.2015. Способ разработки месторождений твердых полезных ископаемых с применением землеройно-фрезерной машины и скреперов.
4. Патент РФ №2569136 от 20.11.2015. Способ подготовки и транспортировки горной массы при разработке глубокозалегающих месторождений и автоматизированный комплекс для его осуществления.
Изобретение относится к горной промышленности и может быть использовано при выполнении вскрышных и добычных работ на месторождениях, сложенных из плотных и полускальных пород, с применением землеройно-фрезерных машин и комбинированного карьерного транспорта. Технический результат заключается в повышении эффективности разработки месторождений за счет дифференцирования карьера на участки для осуществления транспортировки горной массы с ближних участков посредством скреперов, а с дальних - посредством автосамосвалов, обеспечения независимой разгрузки и усовершенствования процесса разгрузки скреперов за счет их конструктивного исполнения, обеспечивающего поворот ковша в вертикальной плоскости. Способ включает использование сопрягаемого с конвейером автоматизированного комплекса с приемными емкостями, землеройно-фрезерных машин для разрыхления породы с размещением горной массы в траншеях, из которых осуществляют ее выемку и транспортировку с ближних участков - скреперами, а с дальних участков - посредством погрузчиков и автосамосвалов. Повышение эффективности операций обеспечивается посредством гравитационной разгрузки ковша скрепера после контакта с приемной емкостью автоматизированного комплекса при заезде задних колес скрепера в приемную емкость и последующего поворота ковша скрепера в вертикальной плоскости с помощью шарнирной связи и гидроцилиндров, установленных на тяговой раме, связанной с осью задних колес. Наполнение ковша скрепера и автосамосвала горной массой фиксируется с помощью датчиков автоматической системы управления. 3 ил.
Способ комбинированной разработки месторождений твердых полезных ископаемых, включающий использование сопрягаемого с конвейером автоматизированного комплекса с приемными емкостями, землеройно-фрезерных машин для разрыхления породы с размещением горной массы в траншеях, из которых осуществляют ее выемку и транспортировку с ближних участков - скреперами с тяговой рамой, ковшом с днищем, боковыми и задней стенками, смонтированными на внешних сторонах боковых стенок направляющими для обеспечения перемещения элементов конструкции для зачерпывания горной массы, а с дальних участков - посредством погрузчиков и автосамосвалов, отличающийся тем, что рыхление, выемка, погрузка, транспортировка и разгрузка горной массы осуществляется с помощью автоматической системы управления для функционального обеспечения процессов рационального рыхления, выемки, погрузки, перемещения скреперов и автосамосвалов к приемным емкостям автоматизированного комплекса, сопрягаемого с конвейером, и независимой разгрузки горной массы из скреперов и автосамосвалов в приемные емкости, при этом повышение эффективности операций обеспечивается посредством гравитационной разгрузки ковша скрепера после контакта с приемной емкостью автоматизированного комплекса при заезде задних колес скрепера в приемную емкость и последующего поворота ковша скрепера в вертикальной плоскости с помощью шарнирной связи и гидроцилиндров, установленных на тяговой раме, связанной с осью задних колес, а наполнение ковша скрепера и автосамосвала горной массой фиксируется с помощью датчиков автоматической системы управления.
| СПОСОБ ПОДГОТОВКИ И ТРАНСПОРТИРОВКИ ГОРНОЙ МАССЫ ПРИ РАЗРАБОТКЕ ГЛУБОКОЗАЛЕГАЮЩИХ МЕСТОРОЖДЕНИЙ И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569136C1 |
| ПОГРУЗОЧНОЕ УСТРОЙСТВО | 1996 |
|
RU2084628C1 |
| СПОСОБ ЗАГРУЗКИ ГОРНОЙ МАССЫ В АВТОСАМОСВАЛЫ И КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОГРУЗКИ | 2013 |
|
RU2530962C1 |
| JP 2014047487 A, 17.03.2014. | |||

