Изобретение относится к единым электроэнергетическим системам (ЕЭЭС) судов и предназначено для использования на судах, морских подвижных объектах и других транспортных средствах, имеющих два и более гребных электрических регулируемых двигателя (ГЭД).
Известен способ торможения ГЭД, основанный на выделении энергии торможения ГЭД на тормозные резисторы через звено постоянного тока, примененный в системе электродвижения атомного ледокола «Арктика» проекта 22220 [Ледокол проекта 22220. Основные положения по проектной технологии и организации постройки. ОАО «ЦТСС», 2009 г. ГКЛИ.3210-304-2009. Госзакупки заказ №0549100000212000001 от 29.06.2012 (http://zakupki.gov.ru/pgz/public/action/orders/info/order_document_list_info/show?source=epz¬ificationId=3720746). В данной системе вся энергия при торможении ГЭД рассеивается в виде тепла в блоке тормозных резисторов гребного электропривода.
Недостатками такого способа торможения являются повышенные масса, габариты и стоимость гребного электропривода.
Наиболее близкой по технической сущности к изобретению и выбранной в качестве прототипа является система на а/л «Таймыр» [ББК 39.455.2 Быков А.С., Башаев В.В., Малышев В.А., Романовский В.В. Гребные электрические установки атомных ледоколов. Учебное пособие. - СПб.: "Элмор", 2004. - страница 222], содержащая в составе гребного электропривода непосредственные преобразователи частоты. Для торможения и реверса ГЭД на данном ледоколе используется рекуперативный способ с поочередным торможением двигателей, при этом энергия торможения поступает на общие шины переменного тока главного распределительного щита (ГРЩ). Электродвигатели в заданной последовательности переходят в генераторный режим, энергия торможения поступает на ГЭД, работающие в двигательном режиме.
Недостатком этого известного технического решения, принятого за прототип, является большой разброс скорости рекуперации в зависимости от режима работы отдельных ГЭД в период их торможения и реверса, следствием чего является увеличенное время процесса реверса судна, а также усложнение процесса маневрирования ледокола из-за переменного времени реверса при различных вариантах управления движением судна.
Задачей предлагаемого технического решения является снижение массогабаритных показателей ЕЭЭС с одновременным повышением быстродействия процесса торможения ГЭД судов с электродвижением с двумя и более ГЭД.
Техническим результатом предлагаемого технического решения является то, что в процессе использования такого способа управления торможением и реверсом ГЭД, значительно сокращается время, расходуемое на торможение судна по сравнению с другими способами. Кроме того, появляется возможность отказаться от применения тормозного резистора или существенно снизить его мощность, что позволит увеличить полезную площадь на судне, улучшить его массогабаритные показатели и маневренность судна в целом, а также снизить стоимость.
Для ЕЭЭС с невозможностью рекуперации энергии торможения в сеть торможение может быть реализовано путем перераспределения энергии через соединенные коммутирующими цепями звенья постоянного тока (напряжения) преобразователей частоты гребных электродвигателей судна.
Указанный технический результат достигается тем, что в способе управления торможением и реверсом гребных электродвигателей судна, заключающемся в поочередном рекуперативном торможении двигателей судна, по изобретению рекуперация энергии торможения осуществляется через звено постоянного тока путем управления соединением звеньев сигналами от системы верхнего уровня в зависимости от скорости судна и рекуперируемой энергии ГЭД, а оптимальные параметры торможения - очередность торможения, время начала, скорость торможения и разгона ГЭД, параметры генераторных установок электростанции определяются с помощью предсказательной модели режима торможения судна с учетом текущих и прогнозируемых параметров движения судна и элементов ЕЭЭС.
При использовании предсказательной модели, входящей в систему управления реверсом и торможением ГЭД судна, которая непрерывно взаимодействует с единой электроэнергетической системой ЕЭЭС, обеспечивается определение прогнозируемого состояния судна через численный расчет с помощью математической модели с учетом поступивших сигналов, что обеспечивает оптимальное по времени торможение и реверс ГЭД судна.
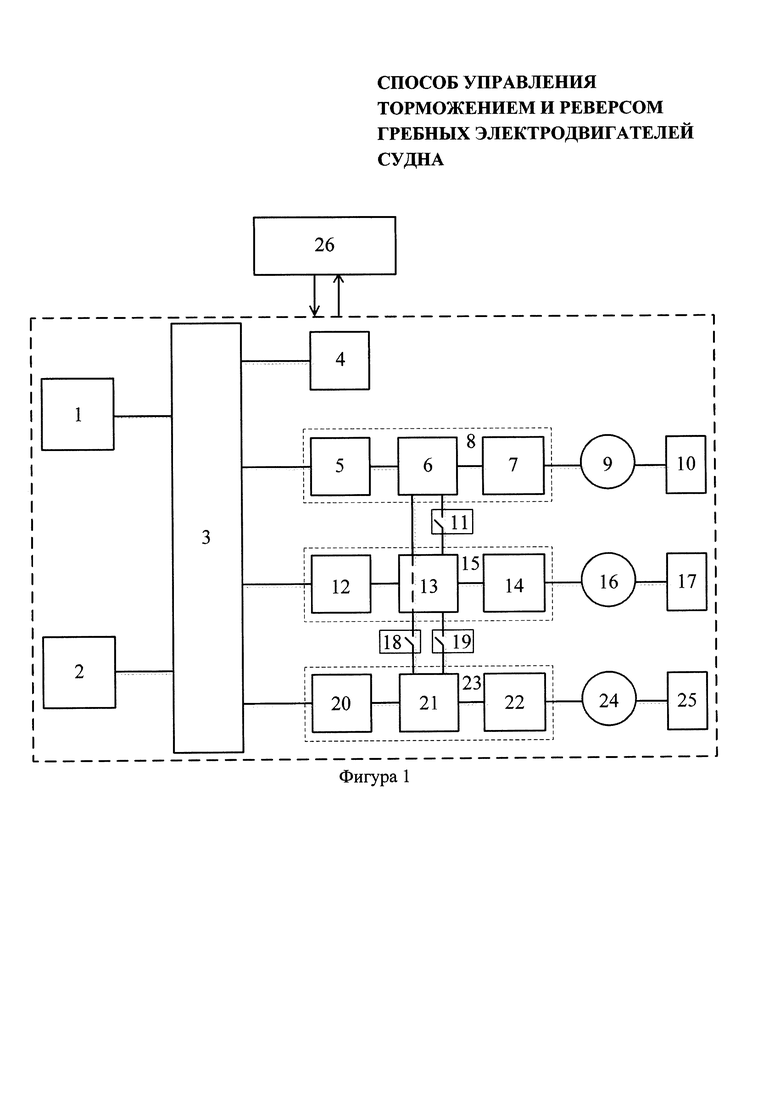
Предлагаемый способ поясняется фиг. 1, на которой изображена функциональная схема ЕЭЭС, на примере трехвальной системы электродвижения судна, где:
1 - генераторная установка
2 - генераторная установка
3 - главный распределительный щит
4 - потребители собственных нужд
5 - неуправляемый выпрямитель
6 - звено постоянного тока (напряжения)
7 - инвертор
8 - полупроводниковый преобразователь частоты
9 - ГЭД
10 - движитель
11 - полупроводниковый ключ рекуперации
12 - неуправляемый выпрямитель
13 - звено постоянного тока (напряжения)
14 - инвертор
15 - полупроводниковый преобразователь частоты
16 - ГЭД
17 - движитель
18 - полупроводниковый ключ рекуперации
19 - полупроводниковый ключ рекуперации
20 - неуправляемый выпрямитель
21 - звено постоянного тока (напряжения)
22 - инвертор
23 - полупроводниковый преобразователь частоты
24 - ГЭД
25 - движитель
26 - система управления торможением и реверсом ГЭД судна
Судовая ЕЭЭС (см. фиг. 1) состоит из генераторных установок 1, 2, работающих на шины главного распределительного щита (ГРЩ) 3, обеспечивающих электроэнергией потребителей собственных нужд 4, полупроводниковых преобразователей частоты 8, 15, 23, обеспечивающих требуемое питание ГЭД 9, 16, 24 в различных режимах их работы, которые приводят во вращение движители 10, 17, 25 (гребные винты).
Каждый из полупроводниковых преобразователей частоты (ППЧ) 8, 15, 23 состоит из неуправляемого выпрямителя 5, 12, 20 соответственно, звена постоянного тока (напряжения) 6, 13, 21 соответственно, посредством которого осуществляется перераспределение энергии торможения между ГЭД 9, 16, 24 соответственно, и инвертора 7, 14, 22 на полупроводниковых ключах соответственно, обеспечивающих как питание требуемой частотой и напряжением ГЭД, так и обратную передачу в звено постоянного тока (напряжения) (6, 13, 21) энергии торможения ГЭД.
ЕЭЭС дополнительно оснащена системой управления торможением и реверсом ГЭД судна 26, в состав которой входит предсказательная модель (не показана) для расчета оптимальных параметров торможения и реверса ГЭД, а также полупроводниковыми ключами рекуперации 11, 18, 19, которые обеспечивают соединение звеньев постоянного тока (напряжения) 6, 13, 21 между собой при рекуперации. Система управления торможением и реверсом ГЭД судна 26 предназначена для оптимального управления соединением звеньев постоянного тока приводов ГЭД, в зависимости от скорости судна и параметров ЕЭЭС судна.
Способ управления торможением и реверсом ГЭД судна, реализуемый при помощи системы управления торможением и реверсом ГЭД судна 26, осуществляется следующим образом.
Рассмотрим случай, когда все ГЭД судна развивают максимальную мощность.
С перекладкой всех постов управления в режим торможения судна начинается процесс рекуперативного торможения ГЭД. Если сигнал на торможение (реверс) пришел одновременно на все ГЭД, то торможение (реверс) начинается с ГЭД 16. Управление процессом реверса и торможения всех ГЭД 9, 16, 24 судна производит система управления торможением и реверсом 26. При поступлении сигнала на реверс (торможение) любого из ГЭД предсказательная модель системы управления торможением и реверсом 26 определяет очередность торможения ГЭД в зависимости от линейной и угловой скорости судна, параметров генераторных установок, прогнозируемого баланса энергии рекуперации. По упреждающему сигналу от системы управления торможением и реверсом 26 происходит снижение мощности генераторных установок 1, 2. В ППЧ 8, 15, 23 происходит отключение неуправляемых выпрямителей 5, 12, 20, инверторы 7 и 22 продолжают осуществлять питание своих ГЭД 9 и 24 соответственно, а инвертор 14 входит в рекуперативный режим, пропуская энергию рекуперации ГЭД 16 на звено постоянного тока 13. Гребные электродвигатели 9, 24 перестают потреблять энергию от сети. В заданной последовательности по сигналу от системы управления торможением и реверсом 26 происходит замыкание полупроводниковых ключей рекуперации 11 и 19. Реверсируемый в данный момент ГЭД 16 переходит в генераторный режим, начинается его рекуперативное торможение, остальные ГЭД 9 и 24 работают в двигательном режиме, потребляя при этом энергию рекуперации ГЭД 16.
Предсказательная математическая модель системы управления торможением и реверсом 26, постоянно находясь в информационном обмене с ЕЭЭС судна, анализирует мощность гребных установок в момент реверса, скорость хода судна, мощность каждого ГЭД в текущий момент времени, просчитывая суммарную их мощность, которая должна всегда удовлетворять условию
ΣP+>⎟Р-⎜
где Р+ - суммарная положительная мощность работающих ГЭД,
Р- - суммарная отрицательная мощность работающих ГЭД (суммарная мощность всех работающих ГЭД должна быть всегда положительной).
При этом может быть предусмотрен запас потребляемой мощности с учетом динамики процессов рекуперации и торможения судна. В зависимости от скорости судна, генерируемой мощности, ограничений по моменту, току, мощности гребного электропривода и других, определяются оптимальные значения очередности торможения каждого ГЭД, времени начала торможения каждого ГЭД и динамические параметры торможения (реверса) ГЭД. После начала рекуперации ГЭД 16, система управления торможением и реверсом 26 вычисляет возможный момент начала торможения, следующего. Как только условие ΣP+>⎟P-⎜ позволяет увеличить энергию рекуперации, система управления 26 формирует разрешающий сигнал на начало рекуперации следующего ГЭД, например, ГЭД 9, после чего инвертор 7 переключается в режим рекуперации с переводом его энергии в общее для звена постоянного тока 6, 13, 21. К этому моменту мощность ГЭД 16 переходит через ноль, изменяется его направление вращения, движитель 17 начинает вращаться в противоположную сторону. Теперь энергия торможения ГЭД 9 поступает на реверс ГЭД 16 и вращение ГЭД 24. Происходит рекуперативное торможение ГЭД 9. Как только баланс мощности ГЭД позволяет увеличить энергию рекуперации, система управления 26 через инвертор 22 переводит ГЭД 24 в режим рекуперативного торможения. Энергия торможения ГЭД 24 вместе с ГЭД 9 через объединенные звенья постоянного тока (напряжения) 6, 13, 21 поступает на реверсивное вращение ГЭД 16. После того как мощность ГЭД 9 перейдет через ноль, изменив его направление вращения на противоположное, энергия тормозящего в данный момент ГЭД 24 будет перераспределяться между реверсивно работающими ГЭД 16 и 9. Происходит остановка ГЭД 24.
В случаях, когда мощность ГЭД 16 переходит через ноль, дальнейшее рекуперативное торможение может осуществляться двумя ГЭД 9 и 24 одновременно, при определенном соотношении их мощностей, если система управления 26 после обработки данных в предсказательной модели сочтет это оптимальным. Ключ 18 предназначен для режимов рекуперации, когда перед началом торможения и реверса в работе находятся только ГЭД 9 и ГЭД 24.
Таким образом, при использовании данного способа управления торможением и реверсом ГЭД, за счет рекуперации энергии торможения через звено постоянного тока путем управления соединением звеньев сигналами от системы верхнего уровня в зависимости от скорости судна и рекуперируемой энергии ГЭД, а также за счет того что оптимальные параметры торможения - очередность торможения, время начала и скорость торможения и разгона ГЭД, параметры генераторных установок электростанции определяются с помощью предсказательной модели режима торможения судна с учетом текущих и прогнозируемых параметров движения судна и элементов ЕЭЭС обеспечивается оптимизация параметров режима торможения (реверса), что ведет к улучшению динамики управления судном.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами | 2016 |
|
RU2665052C2 |
| СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ ЕДИНОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2012 |
|
RU2520822C2 |
| ЕДИНАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 2015 |
|
RU2618614C1 |
| ГРЕБНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА С УСТРОЙСТВОМ ВКЛЮЧЕНИЯ | 2011 |
|
RU2479103C1 |
| Судовая турбоэлектрическая гребная установка | 1983 |
|
SU1134478A1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА МНОГОВАЛЬНОГО СУДНА | 2015 |
|
RU2605449C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОЩНОГО ЧАСТОТНО-УПРАВЛЯЕМОГО ГРЕБНОГО ЭЛЕКТРОПРИВОДА СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ В УСЛОВИЯХ СТЕНДА | 2014 |
|
RU2591213C1 |
| ЭЛЕКТРОДВИЖИТЕЛЬНАЯ УСТАНОВКА СУДНА С НЕСКОЛЬКИМИ ГРЕБНЫМИ ВИНТАМИ | 2019 |
|
RU2723562C1 |
| Гребная электроэнергетическая установка | 2017 |
|
RU2658759C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИЖИТЕЛЬНЫМ КОМПЛЕКСОМ СУДОВ ЛЕДОВОГО КЛАССА И ЛЕДОКОЛОВ | 2016 |
|
RU2648544C1 |
Изобретение относится к электроэнергетическим системам судов. Способ управления торможением и реверсом гребных электродвигателей заключается в поочередном рекуперативном торможении двигателей судна. Рекуперация энергии торможения осуществляется через звено постоянного тока путем управления соединением звеньев сигналами от системы верхнего уровня в зависимости от скорости судна и количества рекуперируемой энергии гребных электрических двигателей. Производится равномерный переброс рекуперативной энергии торможения через звено постоянного тока каждого электродвигателя между всеми электродвигателями судна. С помощью предсказательной модели режима торможения и реверса гребных электрических двигателей судна с учетом текущих и прогнозируемых параметров движения судна и элементов единой электроэнергетической системы определяются оптимальные параметры торможения: очередность торможения, время начала и скорость торможения и разгона гребных электрических двигателей, параметры генераторных установок электростанции. Технический результат заключается в оптимизации торможения судна с двумя и более регулируемыми гребными электродвигателями судна. 1 ил.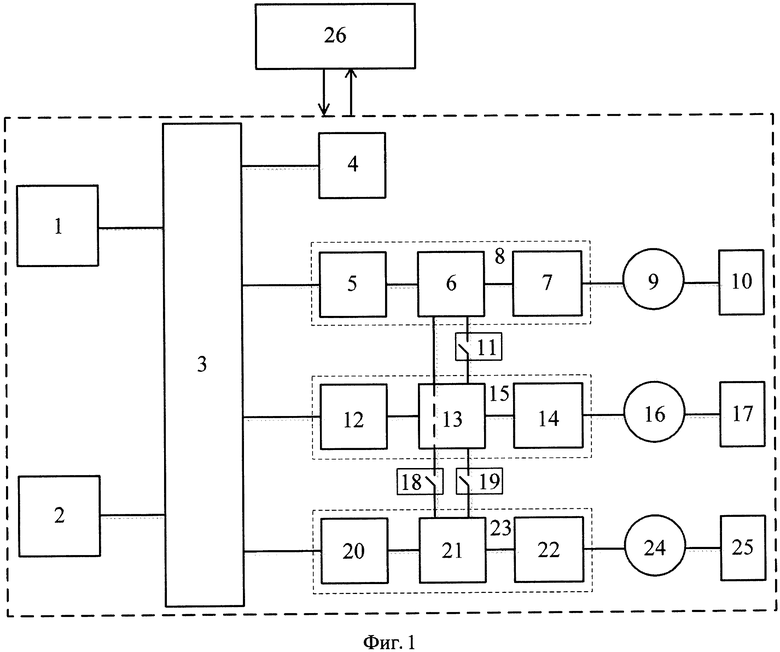
Способ управления торможением и реверсом гребных электродвигателей судна, заключающийся в поочередном рекуперативном торможении двигателей судна, отличающийся тем, что рекуперация энергии торможения осуществляется через звено постоянного тока путем управления соединением звеньев сигналами от системы верхнего уровня в зависимости от скорости судна и количества рекуперируемой энергии гребных электрических двигателей, оптимальные параметры торможения - очередность торможения, время начала и скорость торможения и разгона гребных электрических двигателей, параметры генераторных установок электростанции определяются с помощью предсказательной модели режима торможения и реверса гребных электрических двигателей судна с учетом текущих и прогнозируемых параметров движения судна и элементов единой электроэнергетической системы.
| СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ ЕДИНОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2012 |
|
RU2520822C2 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2011 |
|
RU2458819C1 |
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |
| СПОСОБ ПОЛУЧЕНИЯ 2-МЕТИЛПИРИМИДИН-4,6-(3Н, 5Н)-ДИОНА | 2012 |
|
RU2503666C1 |
| US 8330291 B2, 11.12.2012. | |||

