Предложение относится к судостроению, в частности к электроэнергетическим системам судов большой мощности как гражданского, так и военно-морского флота, содержащих два и более гребных электродвигателя с гребными винтами, для которых необходимо обеспечить работу системы электродвижения с высоким показателем энергетической эффективности без использования блоков гашения энергии торможения гребных электродвигателей (блоков тормозных резисторов). Предлагаемый способ торможения и реверса гребного электропривода с несколькими винтами позволяет запасать энергию торможения в накопителе энергии и в дальнейшем использовать эту энергию по необходимости. Использование данного способа позволит помимо минимального количества элементов в силовом канале электрического преобразователя значительно уменьшить габариты и массу электрического преобразователя электропривода гребных винтов.
Известен способ остановки и торможения гребной электрической установки (Мустафа Г.М., Волков С.В., Ершов А.А., Сенов Ю.М., Минаев Г.М. Преобразователь частоты для гребного электродвигателя. // «ЭЛЕКТРОТЕХНИКА», 2014, №1), при котором энергия, рекуперируемая от гребного электродвигателя, рассеивается тормозными резисторами. Гребная электрическая установка содержит преобразователь частоты, состоящий из двух каналов, выполняющих функции полноценных преобразователей частоты, подключенных каждый к своей системе статорных обмоток гребного электродвигателя. Каждый из двух каналов преобразователя частоты состоит из полууправляемого выпрямителя накопительного конденсатора звена постоянного тока, цепи управления торможением и трехуровнего инвертора. Каналы преобразователя частоты имеют между собой гальваническую развязку по питанию посредством согласующих трансформаторов, а по выходу с помощью двух независимых обмоток гребного электродвигателя. Каждый из каналов преобразователя частоты имеет свою цепь управления торможением, состоящую из блока IGBT ключей, через которые параллельно конденсаторной батарее подключаются внешние тормозные резисторы. Энергия, рассеиваемая тормозными резисторами, зависит от заданного темпа торможения. Недостатком известного способа торможения является то, что энергия торможения гребного электродвигателя бесполезно рассеивается в виде тепла в тормозных резисторах. Еще одним из недостатков известной структуры является наличие габаритной, массивной и дорогой цепи управления торможением, что приводит к уменьшению полезного объема и уменьшению грузоподъемности судна.
Известен способ разгона и торможения судна-электрохода (МПК В63Н 21/17, В63В 38, патент RU 2328408, Веревкин В.Ф., Реков К.А.; Способ разгона и торможения судна-электрохода при отходе-подходе его к пирсу с электрическим питанием от береговой сети), который заключается в том, что при отходе и подходе судна к пирсу при начале его движения и при начале его остановки соответственно подают электрическое питание в судовую сеть от береговой сети, имеющей протяженный участок контактного токопровода. Идея данного способа торможения заключается в том, что при подходе судна к пирсу останавливают гребной электродвигатель или снижают частоту его вращения, осуществляя торможение судна при питании получаемого с берега. Такой способ удешевляет использование гребной установки, повышает надежность и энергетическую эффективность. Недостатком данного способа является наличие токосъемного устройства, расположенного над судном и контактирующего с береговым токопроводом, который располагают над водной поверхностью. К недостаткам так же можно отнести то, что данный способ остановки будет работать только при нахождении судна у пирса.
Наиболее близким по технической сущности к заявляемому способу управления торможением и реверсом гребного электропривода является способ торможения асинхронного электродвигателя (МПК Н02Р 3/22, патент RU 1554101 А1, авторское свидетельство (21) 4383022/24-07 (22) 29.12.87 (46) 30.03.90. Бюл. 11 12 (71); Солодов В.А., Новоселов Б.В., Быков В.Д., Голубев А.Н., Королев А.Н.; Способ торможения частотно-регулируемого n-фазного асинхронного электродвигателя), который заключается в использовании рекуперируемой энергии с одной группы обмоток многообмоточного электродвигателя для создания тормозного момента в других группах обмоток этого же асинхронного электродвигателя. Устройство для реализации способа торможения содержит две трехфазные статорные обмотки одного асинхронного электродвигателя, подключенные к своему инвертору напряжения, входы которых объединены общими шинами постоянного тока. При торможении электродвигателя с помощью первого инвертора обеспечивают рекуперацию энергии с первой группы обмоток электродвигателя и используют эту энергию для создания тормозного момента второй группой фазных обмоток этого же электродвигателя. При этом с помощью второго инвертора либо изменяют порядок чередования фаз напряжения питания второй группы обмоток на противоположный по сравнению с двигательным режимом, обеспечивая торможение противовключением, либо подают во вторую группу обмоток постоянный ток, создавая режим динамического торможения. Известный способ позволяет повысить интенсивность торможения, улучшить энергетические и массогабаритные показатели привода. Недостатком известного способа является низкая эффективность данного способа торможения, а также большие токовые нагрузки на инверторы напряжения и обмотки либо большое время торможения, при ограничении, наложенном на величину тока. К недостаткам устройства для реализации данного способа можно отнести наличие сложного и дорогого в изготовлении многообмоточного электродвигателя, необходимость отключения звена постоянного тока от зажимов первичной сети.
Целью предлагаемого изобретения является повышение энергетической эффективности электропривода и осуществление торможения и реверса гребной электрической установки с несколькими гребными винтами без использования тормозного модуля с передачей энергии торможения на накопитель энергии либо с рассеянием энергии торможения в рабочей среде - воде. Кроме того, предложенный способ позволяет контролировать и управлять потоками энергии в каждом из силовых каналов такой электроэнергетической системы.
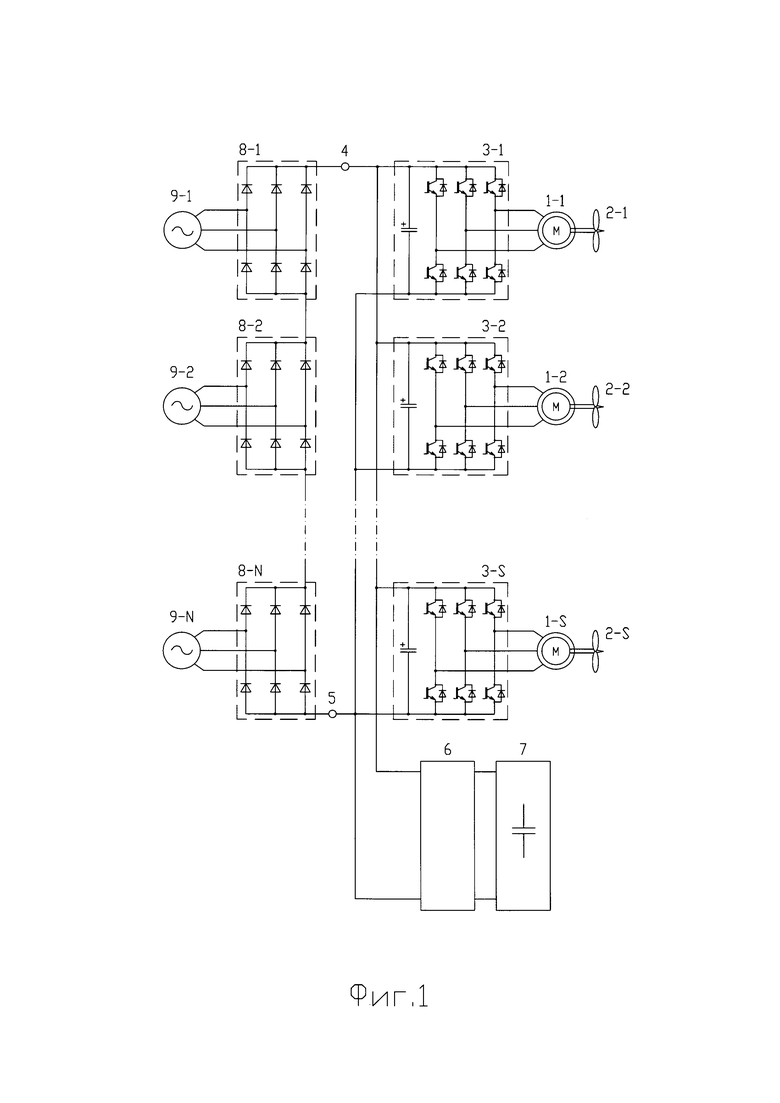
На Фиг. 1 представлена структурная схема системы электродвижения, реализующего предлагаемый способ управления.
Устройство для реализации способа управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами (Фиг. 1) содержит гребные электродвигатели 1-1÷1-S с гребными винтами 2-1÷2-S, которые через инверторы напряжения 3-1÷3-S подключены к общим шинам постоянного тока 4 и 5, к которым также подключен через согласующий электрический преобразователь 6 накопитель энергии 7. К общим шинам постоянного тока 4 и 5 подключены выпрямители напряжения 8-1÷8-H, каждый из которых получает питание от своего источника переменного напряжения 9-1÷9-Н.
Устройство для реализации способа управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами (Фиг. 2) может дополнительно содержать согласующий электрический преобразователь 10, подключенный к общим шинам постоянного тока 4 и 5 для питания вспомогательных потребителей 11.
Устройство для реализации способа управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами работает следующим образом. Для управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами электропривод перестает получать питание от питающей сети, и весь электропривод либо его часть переводится в генераторный режим. При необходимости остановки или изменения направления движения судна рекуперируемая электроэнергия с гребных электродвигателей 1-1÷1-S через инверторы напряжения 3-1÷3-S передается на накопитель энергии 7 через согласующий электрический преобразователь 6. В случае невозможности накопителя энергии 7 принять большее значение рекуперируемой энергии, остановка и реверс гребных электродвигателей 1-1÷1-S осуществляется в следующей последовательности: меньшая или равная целая часть половины гребных электродвигателей 1-1÷1-N (где N=trunk(S/2)) переводится в генераторный режим, при этом рекуперируемая энергия через инверторы напряжения 3-1÷3-N электродвигателей 1-1÷1-N поступает на общие шины постоянного тока 4 и 5. Происходит рост напряжения на шинах постоянного тока 4 и 5, при этом выпрямители напряжения 8-1÷8-Н электрического преобразователя находятся в запертом состоянии. Энергия, рекуперируемая гребными электродвигателями 1-1÷1-N, переведенными в генераторный (тормозной) режим, потребляется гребными электродвигателями 1-(N+1)÷1-(S-N), работающими в двигательном режиме. После остановки гребных электродвигателей 1-1÷1-N они переводятся в двигательный режим с направлением вращения в противоположную сторону, а гребные электродвигатели 1-(N+1)÷1-(S-N) переводятся в генераторный режим, энергия, рекуперируемая ими, передается на раскрутку гребных электродвигателей 1-1÷1-N. После остановки гребных электродвигателей 1-(N+1)÷1-(S-N) они переводятся в двигательный режим и энергия из сети потребляется всеми 1-1÷1-S электродвигателями на вращение в противоположную сторону.
При необходимости остановки или изменения направления движения судна энергия торможения с гребных электродвигателей 1-1÷1-S может передаваться через согласующий электрический преобразователь 10, подключенный к общим шинам постоянного тока 4 и 5 для питания вспомогательных потребителей 11 (Фиг. 2).
Более подробно рассмотрим режим остановки и реверса гребной электрической установки, содержащей два гребных электродвигателя 1-1, 1-2, с двумя гребными винтами 2-1, 2-2, два выпрямителя напряжения 8-1, 8-2, два инвертора напряжения 3-1, 3-2, два источника переменного напряжения 9-1, 9-2, общие шины постоянного тока 4 и 5, согласующий электрический преобразователь 6 и накопитель энергии 7, схема которой представлена на Фиг. 3.
При необходимости торможения судна и при условии, что накопитель энергии 7 не полон и способен принять энергию торможения, гребные электродвигатели 1-1 и 1-2 переводятся в генераторный режим, при этом рекуперируемая энергия поступает через инверторы напряжения 3-1 и 3-2 на общие шины постоянного тока 4 и 5. Происходит рост напряжения на данных шинах 4 и 5. При этом входные выпрямители напряжения 8-1 и 8-2 находятся в запертом состоянии и электроэнергия не потребляется от источников переменного напряжения 9-1 и 9-2. Энергия, рекуперируемая гребными электродвигателями 1-1 и 1-2 через согласующий электрический преобразователь 6 (в данном случае обратимый инвертирующий преобразователь постоянного напряжения), передается на заряд накопителя энергии 7.
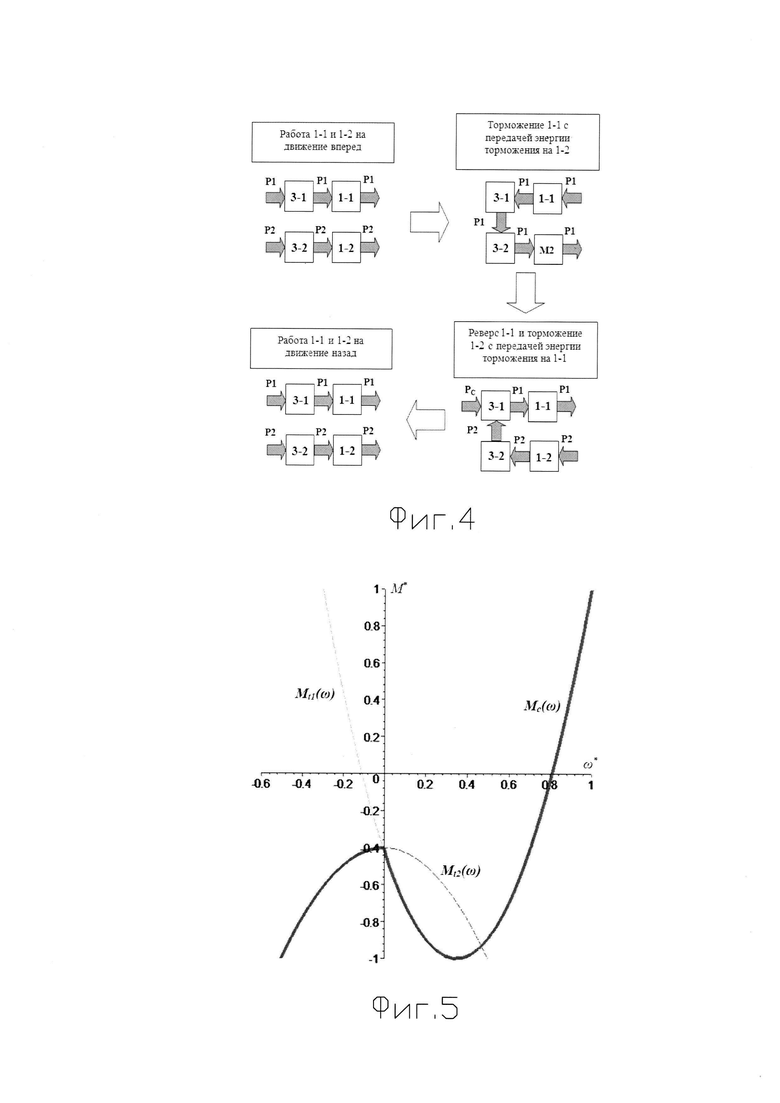
В случае невозможности накопителем энергии 7 принять на себя энергию торможения и при необходимости торможения судна гребной электродвигатель 1-1 переводится в генераторный режим, при этом рекуперируемая энергия поступает через инвертор напряжения 3-1 на общие шины постоянного тока 4 и 5. Происходит рост напряжения на данных шинах 4 и 5. При этом входные выпрямители напряжения 8-1 и 8-2 находятся в запертом состоянии и электроэнергия не потребляется от источников переменного напряжения 9-1 и 9-2. Энергия, рекуперируемая гребным электродвигателем 1-1, потребляется гребным электродвигателем 1-2, работающим в двигательном режиме. После остановки гребного электродвигателя 1-1 он переводится в двигательный режим с направлением вращения в противоположную сторону, а гребной электродвигатель 1-2, работавший в двигательном режиме, переводится в генераторный режим. Энергия, рекуперируемая электродвигателем 1-2, передается на раскрутку гребного электродвигателя 1-1, переведенного в двигательный режим. После остановки гребного электродвигателя 1-2 он переводится в двигательный режим и осуществляется работа гребных электродвигателей 1-1 и 1-2 на движение судна назад. На Фиг. 4 изображены направления потоков энергии при торможении и реверсе гребного электропривода с двумя гребными винтами 2-1 и 2-2.
Произведем математическое описание процесса торможения и реверса гребной электрической установки с двумя гребными электродвигателями 1-1 и 1-2 по предложенному способу остановки и торможения. Для описания поведения винта при остановке и реверсе при скорости судна, равной номинальной, будем использовать реверсивную механическую характеристику винта, приведенную на Фиг. 5, которая характеризует зависимость момента сопротивления от угловой частоты вращения гребного винта при его реверсе. Математическое описание механической характеристики винта (Фиг. 5) выполнено с использованием двух парабол:
Mt1(ω)=4,73⋅ω2-3,31⋅ω-0,41;
Mt2(ω)=-2,4⋅ω2-0,41.
Тогда аналитическая зависимость реверсивной характеристики Мс(ω) имеет вид:
 ,
,
где sign(ω) - знаковая функция от частоты вращения ω.
Управление скоростью вращения ротора связано с управлением электромагнитным моментом. Эта связь непосредственно следует из основного уравнения динамики, записанного в относительных единицах:
 ,
,
где Tмех=J⋅ωб/Mб - механическая постоянная времени,  - оператор дифференцирования, J - момент инерции механизма, ωб - базовое значение скорости, Мб - базовое значение момента.
- оператор дифференцирования, J - момент инерции механизма, ωб - базовое значение скорости, Мб - базовое значение момента.
С учетом того что среднестатистическая постоянная времени электродвигателей составляет порядка 0,3 с, то примем суммарную постоянную времени гребного винта плюс гребного электродвигателя равной 1 с (Tмех=1 с).
Произведем описание процесса торможения и реверса гребного винта по предложенному способу в гребной электрической установке, содержащей два гребных винта 2-1 и 2-2 (движителя) с электроприводом собранным по схеме, изображенной на Фиг. 3.
Запишем уравнения движения для первого 1-1 и второго 1-2 гребного электродвигателя
 ;
;  .
.
Введем ограничения на максимально возможное значение электромагнитного момента, развиваемого гребными электродвигателями 1-1 и 1-2, равным величине max⎟Мдв1⎜=max⎟Mдв2⎜=1,2
Используя начальные условия ω1(0)=1, Мдв1=-1,2 получим график функции ω1(t), который изображен на Фиг. 6.
Тогда мощность на гребном электродвигателе 1-1 будет равна Рдв1(t)=Мдв1⋅ω1(t); график функции Pдв1(t) изображен на Фиг. 7.
При этом отрицательная величина Pдв1(t) характеризует генераторный режим работы гребного электродвигателя 1-1 и режим гидротурбины гребного винта 2-1, а положительная величина Pдв1(t) характеризует двигательный режим работы гребного электродвигателя 1-1, при котором гребной винт 2-1 создает упор при реверсе гребного электродвигателя 1-1.
Используя условие равенства мощностей Pдв1(t)=Рдв2(t), величину электромагнитного момента гребного электродвигателя 1-2 можно записать в следующем виде  .
.
Используя начальные условия ω2(0)=1 получим зависимость ω2(t), график которой изображен на Фиг. 8.
Подставляя результаты численного решения  относительно ω2(t) в
относительно ω2(t) в  получим описание того, как должно меняться значение электромагнитного момента электродвигателя 1-2, график Мдв2(t) изображен на Фиг. 9.
получим описание того, как должно меняться значение электромагнитного момента электродвигателя 1-2, график Мдв2(t) изображен на Фиг. 9.
Мощности на валах электродвигателей 1-1 и 1-2 определяются согласно
Pдв1(t)=Mдв1(t)⋅ω1(t); Pдв2(t)=Mдв2(t)⋅ω2(t).
На Фиг. 10 приведены графики временных зависимостей мощностей на валах гребных электродвигателей 1-1, 1-2 и суммарная потребляемая мощность, потребляемая гребными электродвигателями 1-1 и 1-2 от источников переменного напряжения 9-1 и 9-2. Из данных графиков видно, что до определенного момента времени (до момента вхождения электромагнитного момента гребного электродвигателя 1-2 в режим ограничения, при котором Мдв1=-1,2) сумма мощностей на валу гребных электродвигателей 1-1 и 1-2 равна нулю. При этом нет необходимости сброса энергии торможения на блок гашения энергии торможения. После достижения Мдв2=-1,2 происходит отбор мощности от инверторов напряжения 3-1 и 3-2 для работы гребных электродвигателей 1-1 и 1-2 на реверс. На Фиг. 11 изображены временные диаграммы ω1(t), Мдв1(t), ω2(t), Mдв2(t) при торможении и реверсе гребного электропривода с двумя гребными винтами 2-1 и 2-2.
Таким образом, предложенный способ управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами сводится к тому, чтобы осуществлять сброс энергии торможения на накопитель энергии либо на другие потребители, подключенные к шинам звена постоянного тока, либо при невозможности накопителя энергии и других потребителей принять энергию; эта энергия передается другому гребному электродвигателю, пока не остановится первый, а потом наоборот - энергия от остановки второго гребного электродвигателя передается на раскрутку первого с рассеянием энергии торможения в рабочей среде - воде. Использование накопителя энергии также позволит уменьшить установленную мощность первичных тепловых источников энергии до установленной мощности потребителей, поскольку энергия, накопленная в накопителе, будет расходоваться на покрытие динамики при пуске электропривода в ход, либо при необходимости его разгона до более высокой скорости.
Преимуществом данного способа управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами является повышение качества и ускорение процесса торможения судна без использования специального тормозного модуля, что позволит повысить энергетическую эффективность электропривода и улучшить массогабаритные характеристики системы электродвижения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДВИЖИТЕЛЬНАЯ УСТАНОВКА СУДНА С НЕСКОЛЬКИМИ ГРЕБНЫМИ ВИНТАМИ | 2019 |
|
RU2723562C1 |
| ЕДИНАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 2015 |
|
RU2618614C1 |
| Гребная электроэнергетическая установка | 2017 |
|
RU2658759C1 |
| ГРЕБНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2020 |
|
RU2756141C1 |
| ГРЕБНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА С ДВОЙНЫМИ ШИНАМИ ПОСТОЯННОГО ТОКА | 2021 |
|
RU2765022C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ И РЕВЕРСОМ ГРЕБНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ СУДНА | 2016 |
|
RU2630024C2 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА С СИСТЕМОЙ ЭЛЕКТРОДВИЖЕНИЯ | 2018 |
|
RU2693745C1 |
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 2017 |
|
RU2655569C1 |
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |
| Судовая турбоэлектрическая гребная установка | 1983 |
|
SU1134478A1 |





Изобретение относится к области электротехники и может быть использовано в электроэнергетических системах судов большой мощности как гражданского, так и военно-морского флота, содержащих два и более гребных электродвигателя с гребными винтами, для которых необходимо обеспечить работу системы электродвижения с высоким показателем энергетической эффективности без использования блоков гашения энергии торможения гребных электродвигателей. Техническим результатом является повышение качества и ускорение процесса торможения судна без использования специального тормозного модуля, что позволит повысить энергетическую эффективность электропривода и улучшить массогабаритные и энергетические характеристики системы электродвижения. В способе управления торможением и реверсом многодвигательного гребного электропривода обеспечивают управление потоками энергии между гребными электродвигателями, накопителем и вспомогательными потребителями. Структурная схема системы электродвижения для реализации способа обладает простотой и минимальным количеством элементов силового канала и позволяет осуществлять обмен энергией между гребными электродвигателями и накопителем энергии в динамических режимах работы гребного электропривода. 1 з.п. ф-лы, 11 ил.
.
1. Способ управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами, при котором электропривод перестает получать питание от питающей сети и весь электропривод либо его часть переводится в генераторный режим, отличающийся тем, что при необходимости остановки или изменения направления движения судна рекуперируемая электроэнергия с гребных электродвигателей S через инверторы напряжения передается на накопитель энергии через согласующий электрический преобразователь, в случае невозможности накопителя энергии принять большее значение рекуперируемой энергии остановка и реверс гребных электродвигателей осуществляется в следующей последовательности: меньшая или равная целая часть половины гребных электродвигателей N=trunk(S/2) переводится в генераторный режим, при этом рекуперируемая энергия через инверторы напряжения электродвигателей N поступает на общие шины постоянного тока, происходит рост напряжения на данных шинах, при этом выпрямители напряжения электрического преобразователя находятся в запертом состоянии, энергия, рекуперируемая гребными электродвигателями N, переведенными в генераторный (тормозной) режим, потребляется гребными электродвигателями S-N, работающими в двигательном режиме, после остановки гребных электродвигателей N они переводятся в двигательный режим с направлением вращения в противоположную сторону, а гребные электродвигатели S-N переводятся в генераторный режим, а энергия, рекуперируемая ими, передается на раскрутку гребных электродвигателей N, после остановки гребных электродвигателей S-N они переводятся в двигательный режим и энергия из сети потребляется всеми S электродвигателями на вращение в противоположную сторону.
2. Способ управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами по п. 1, отличающийся тем, что энергия торможения с гребных электродвигателей передается через согласующий электрический преобразователь, подключенный к общим шинам постоянного тока, для питания вспомогательных потребителей.
| СПОСОБ РАЗГОНА И ТОРМОЖЕНИЯ СУДНА-ЭЛЕКТРОХОДА ПРИ ОТХОДЕ-ПОДХОДЕ ЕГО К ПИРСУ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ ОТ БЕРЕГОВОЙ СЕТИ | 2006 |
|
RU2328408C1 |
| Способ торможения частотно-регулируемого N-фазного асинхронного электродвигателя | 1987 |
|
SU1554101A1 |
| Звуковая коробка для граммофона | 1930 |
|
SU20352A1 |
| DE 10210000347 A1, 19.08.2010 | |||
| JP 2010188994 A, 02.09.2010 | |||
| US 8115334 B2, 14.02.2012 | |||
| WO 2016065119 A1, 28.04.2016 | |||
| CN 103329396 A, 25.09.2013. | |||

