Изобретение относится к горной промышленности, в частности к электромагнитным устройствам ударного действия для дробления негабаритов, и может быть использовано для забивки свай, анкеров, шпунта.
Целью изобретения является повышение КАД молота за счет оптимизации управления.
На фиг. 1 показан электромагнитный молот, разрез; на фиг.2 диаграмма рабочего процесса молота; на фиг. 3 схема работы одного из промежуточных датчиков положения и управляемых им катушек.
Электромагнитный молот (фиг. 1) содержит четыре одинаковые по размерам электромагнитные катушки 1-4 длиной L, заключенные в отдельные кольцевые ферромагнитные корпуса 5-8 с ферромагнитными полюсами 9, 10 и диамагнитными фланцами 11-16, Катушки и полюса центрируются диамагнитной направляющей 17, внутри которой перемещается боек 18 длиной Lб, ударяя по наголовнику (шаботу) 19 и рабочему инструменту 20.
Каждая катушка 1-4 подключена к своему отдельному блоку 21-24 питания. В свою очередь каждый блок 21-24 состоит из силового тиристорного преобразователя (управляемого выпрямителя) 25-28 и его блока 29-32 управления.
Блоки 29-32 управления каждого блока 21-24 питания имеют по два функциональных входа 33-40. Функциональные входы 33-36 являются входами Пуск. Сигнал, поступающий на эти входы 33-36, производит подключение блоков 21-24 питания к катушкам 1-4. Функциональные входы 37-40 обозначены входами Стоп. Сигнал, поступающий на эти входы 37-40, производит отключение блоков 21-24 питания от электромагнитных катушек 1-4.
В промежутке между наголовником и ближайшей к нему катушкой расположены три датчика 41-43 положения бойка. В качестве датчиков положения используются бесконтактные конечные выключатели, на выходе которых появляется сигнал логической единицы "1" в момент появления в зоне чувствительности датчика металла. Таким образом, при движении бойка вверх на выходах датчиков 41-43 происходит изменение сигналов из "1" в "0", а при движении бойка вниз наоборот из "0" в "1", так как датчики размещены по вертикали один над другим в отверстиях направляющей 17.
Датчик 41 размещен вблизи нижнего торца бойка, когда боек 18 находится на наголовнике 19. При этом верхний торец бойка находится между катушками 1 и 2. Датчик 42 расположен над датчиком 41 на расстоянии 3/4Lк, а датчик 43 над датчиком 42 на расстоянии Lк от последнего.
Назначение датчиков 41-43 выдача сигналов о местоположении бойка, формирование же сигналов на управление работой блоков 21-24 питания производит блок 44 согласования. Этот блок содержит два элемента И 45, 46, две кнопки 47 и 48 фиксации соответственно Пуск и Стоп, два одновибратора 49, 50 с потенциометрами 51 и 52, элемент 53 задержки импульса от датчика 42, два логических элемента И 54, 55 и два RS-триггера 56. 57. Элемент 53 задержки импульса, устанавливающего RS-триггер 57 в единицу, имеет регулировку по времени задержки, причем его регулирующий элемент имеет механическую связь с потенциометров 52 длительности импульса в одновибраторе 49. Пpи уменьшении длительности импульса одновибратора 49 время задержки блока 53 увеличивается.
Устройство работает следующим образом.
В момент включения боек находится в зоне чувствительности всех датчиков 41-43 и на их выходах присутствует сигнал логической "1". При нажатии кнопки 47 Пуск она фиксируется, а сигналы с датчиков 41, 42 через элементы И-НЕ 45, 46 устанавливают RS-триггеры 56, 57 в "1". Их прямые выходы подключены к входам 33, 34 Пуск блоков 29, 30 управления в блоках 21, 22 питания катушек 1, 2. На выходе тиристорных преобразователей 25, 26 появляется напряжение U1, U2 и по обмоткам катушек 1, 2 протекает ток i1, i2 (фиг.2). Электромагнитная сила катушек 1 и 2 составляющих секцию, поднимает боек вверх. При подъеме бойка на высоту h≥3/4Lк (расстояние между датчиками 41 и 42) на выходе датчика 42 устанавливается "0", при этом запускается одновибратор 49, подключенный прямым выходом к входу 35 Пуск, блока 31 управления в блоке 23 питания катушки 3, а по срезу сигнала с инверсного выхода одновибратора 49 через элемент И 55 сбрасывается RS-триггер 57, инверсный выход которого подключен к входу 37 Стоп блока 29 управления в блоке 21 питания. При этом тиристорный преобразователь 25 выключается, а преобразователь 27 включается, По обмотке катушки 3 протекает ток i3, а обмотка обесточивается. Боек под действием электромагнитных сил катушки 2 и 3 продолжает движение вверх.
При подъеме бойка на высоту h≥3/4Lк+ Lк на выходе датчика 43 устанавливается "0". При этом происходят запуск одновибратора 50, подключенного прямым выходом к входу 36. Пуск блока управления в блоке 24 питания электромагнитной катушки 4 и сброс RS-триггера 56. Сигнал с инверсного выхода триггера 56 подается на вход Стоп 38 блока 30 управления в блоке 22 питания, и тиристорный преобразователь 26 выключается, обесточив катушку 2, а на выходе тиристорного преобразователя 28 появляется напряжение U4 и по обмотке катушки 4 течет тока i4. Боек под действием электромагнитных сил катушек 3 и 4 поднимается выше.
Когда блок достигает высоты h≥2Lк + +1/4Lк, т.е. по истечении времени Т3 (фиг. 2) после запуска одновибратора 49 на прямом его выходе устанавливается "0", а на инверсном, подключенном к входу 39 Стоп блока 31 управления в блоке 27 питания катушки 3, устанавливается "1". Этот сигнал запрещает работу преобразователя 27, и обмотка 3 обесточивается. Боек движется под действием сил катушки 4.
Наличие полюса 10 у электромагнитной катушки 4 при небольших зазорах δ< 3/4Lк повышает ее тяговое усилие и позволяет осуществлять подъем бойка одной катушкой.
Когда боек достигает высоты h≈2Lк + +3/4Lк и по истечении времени Т4 после запуска одновибратора 50 на его прямом выходе устанавливается "0", а на инверсном, подключенном к входу 40 Стоп блока 32 управления в блоке 24 питания обмотки 4, устанавливается "1". По этому сигналу преобразователь 28 включается и катушка 4 обесточивается. Бок, совершив свободный выбег за счет сил инерции, останавливается на высоте h≈3Lк, а затем под действием силы тяжести падает вниз.
На расстоянии 3/4Lк до удара на выходе датчика 42 появляется "1", а после инвертора 46- "0", который через блока 53 задержки устанавливает RS-триггер 57 в "1", запуска тем самым тиристорный преобразователь 25 блока 21 питания через его блок 29 управления. На выходе блока 21 питания появляется напряжение U1 и по катушке 1 течет ток i1.
В момент удара на выходе датчика 41 происходит смена сигнала на "0" в "1", этот сигнал, пройдя инвертор 45, устанавливает RS-триггер 56 в "1". На выходе блока 22 питания появляется напряжение U2, а в обмотке " ток i2.
Боек после удара поднимается так же, как было описано ранее.
Далее циклы повторяются. Остановка молота производится нажатием кнопки 46 Стоп. При этом происходит сброс RS-триггеров 56, 57 и одновибраторов 49, 50 и они запрещают работу блоков 21-24 питания.
Регулировка высоты подъема бойка, а следовательно энергии и частоты ударов, производится путем изменения длительности импульсов с одновибраторов 50 и 49 элементами 51 и 52 регулировки соответственно. Уменьшив длительность импульса одновибратора 50 до единиц миллисекунд, мы практически отключает катушку 4. Высота подъема при этом будет на 3Lк, а 2 1/4Lк. Если при этом еще уменьшить и время включения катушки 3 (длительность импульса одновибратора 49) то можно почти вдвое уменьшить высоту подъема бойка, т.е. h≈1 3/4Lк. При этом энергия удара уменьшается почти вдвое, а частота ударов возрастает (фиг.2).
Взаимосвязь промежуточного датчика 42 положения с блоками управления катушек 1, 2, 3, 4 поясняется с помощью фиг.3, на которой показан момент переключения катушек с 1 на 3 по сигналу с датчика 42. При этом верхний торец бойка внедрен во 2 катушку на 3/4Lк, т.е. находится на расстоянии 1/4Lк до места разделения 2 и 3 катушек.
Переключение катушек с 1 на 3 или со 2 на 4 в момент, когда верхний торец бойка не дошел до места разделения 2 и 3 или 3 и 4 катушка, способствует улучшению процесса трансформации энергии отключаемой катушки во включенную. При этом режиме переключений трансформируется большая часть энергии отключаемой катушки, а электромагнитное поле включаемой катушки разворачивается быстрее и раньше подхватывает боек, что улучшает процесс энергопреобразования и повышает КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1989 |
|
SU1731018A1 |
| Ковочное устройство | 1981 |
|
SU1219218A1 |
| Система регулирования электромагнитного молота | 1986 |
|
SU1388556A2 |
| Электромагнитный молот для подводных работ | 1984 |
|
SU1472572A1 |
| Скважинный сейсмоисточник | 2020 |
|
RU2753805C1 |
| Электрическая машина ударного действия | 1990 |
|
SU1710720A1 |
| Электропривод | 1990 |
|
SU1830611A1 |
| СКВАЖИННЫЙ СЕЙСМОИСТОЧНИК | 2017 |
|
RU2642199C1 |


Изобретение относится к горной промышленности и может быть использовано для дробления негабаритов, а также для забивки свай, анкеров, шпунта. Цель изобретения повышение КПД молота за счет оптимизации управления. Электромагнитный молот содержит четыре одинаковые по размерам электромагнитные катушки (ЭМК) 1 4, заключенные в отдельные кольцевые ферромагнитные корпуса 5 8 с ферромагнитными полюсами 9, 10 и диамагнитными фланцами, 11 16. При этом ЭМК 1 4 и полюса центрируются диамагнитной направляющей 17, внутри которой перемещается боек 18, ударяя по наголовнику 19 и рабочему инструменту 20. Каждая ЭМК 1 4 подключена к своему блоку 21 24 питания. В промежутке между наголовником 19 и нижней ЭМК расположены датчики 41 43 положения, подключенные к блоку согласования (БС) 44. Датчики 41 43 выдают сигналы о местонахождении бойка 18, а БС 44 формирует на основе этой информации сигналы на управление блоков 21 24 питания. Выполнен БС 44 на логических элементах и содержит элементы ИЛИ НЕ 45, 46, одновибраторы 49, 50 с потенциометрами 51, 52, элемент 53 задержки импульса от датчика 42, элементы И 54, 55, RS-триггеры 56, 57 и кнопки 47 и 48 с фиксацией соответственно Пуск и Стоп. Включение ЭМК 1 4 для перемещения бойка 18 происходит с первой ЭМК 1 на третью или со второй ЭМК 2 на четвертую в момент, когда верхний торец бойка 18 не дошел до места разделения второй и третьей или третьей и четвертой ЭМК. Такое переключение способствует улучшение процесса трансформации энергии отключаемой ЭМК во включаемую. 3 ил.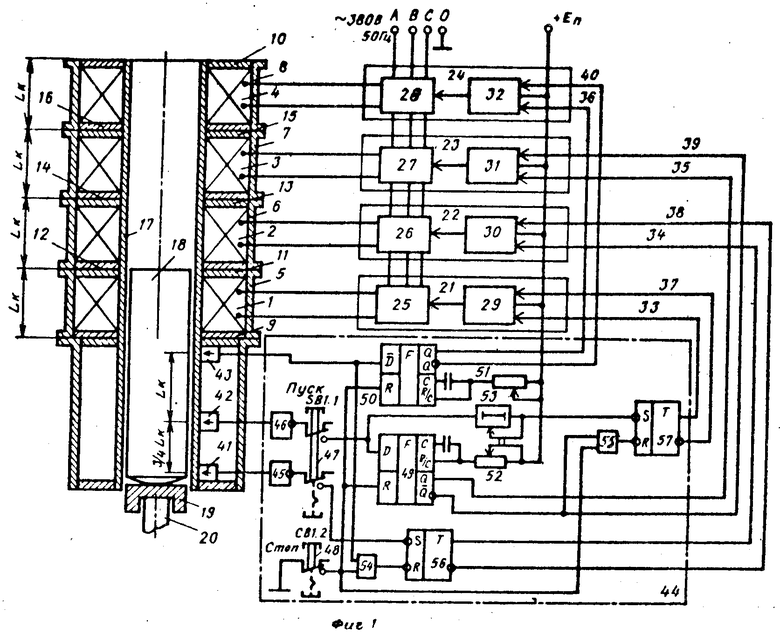
ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ, содержащий размещенные одна над другой четыре соосные электромагнитные катушки, разделенные между собой диамагнитными фланцами и подключенные каждая к своему блоку питания, размещенный внутри диамагнитной направляющей боек, верхняя часть которого расположена внутри нижней катушки, а нижняя часть бойка установлена с возможностью взаимодействия с наголовником рабочего инструмента, три датчика положения бойка, расположенные друг над другом в промежутке между наголовником и нижней катушкой, блок согласования и источник питания, отличающийся тем, что, с целью повышения КПД за счет оптимизации управления, блок согласования содержит два элемента И, два триггера, элемент задержки, два потенциометра, два одновибратора, кнопку Стоп и кнопку Пуск, и два элемента ИЛИ-НЕ, выход первого из которых через первый контакт кнопки Пуск подключен к входу элемента задержки, выход второго элемента ИЛИ-НЕ через вторые контакты кнопки Пуск подключен к первому входу первого триггера, второй вход которого подключен к выходу первого элемента И, а первый вход которого соединен с первым входом первого одновибратора, первый вход второго одновибратора подключен к входу элемента задержки, а вторые входы первого и второго одновибраторов и первого элемента И объединены и подключены к первому входу второго элемента И, первый выход первого одновибратора подключен к первому выводу первого потенциометра, первый выход второго одновибратора подключен к первому выводу второго потенциометра, а вторые выводы потенциометра объединены и подключены к положительной шине источника питания, а второй вывод второго одновибратора подключен к второму входу второго элемента И, а кнопка Стоп соединяет отрицательную шину источника питания с вторым входом первого элемента И, причем первый датчик подключен к первому входу первого одновибратора, являющемуся первым входом блока согласования, выход второго датчика подключен к входу элемента ИЛИ-НЕ, являющемуся вторым входом блока согласования, выход третьего датчика подключен к входу второго элемента ИЛИ-НЕ, являющемуся третьим входом блока согласования, а второй и третий выходы первого одновибратора, являющиеся первым и вторым выходами блока, подключены к первому и второму входам первого блока питания, второй и третий выходы второго одновибратора, являющиеся третьим и четвертым выходами блока согласования, подключены к первому и второму входам второго источника питания, первый и второй выходы первого триггера, являющиеся пятым и шестым выходами блока согласования, подключены к первому и второму входам третьего источника питания, первый и второй выходы второго триггера, являющиеся седьмым и восьмым выходами блока питания, подключены к первому и второму входам четвертого блока питания.
| Авторское свидетельство СССР N 1403704, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
