Область техники, к которой относится изобретение
Изобретение относится к телеметрическому устройству с признаками, раскрываемыми в ограничительной части пункта 1 формулы изобретения, к электронному блоку с признаками, раскрываемыми в ограничительной части пункта 12 формулы, к сельскохозяйственному автопоезду согласно пункту 13 формулы, к способу определения состояния с признаками, раскрываемыми в ограничительной части пункта 14 формулы, и к программному коду согласно пункту 15 формулы.
Уровень техники
В современном сельском хозяйстве все большее внимание уделяется высокой эффективности расходования производственных ресурсов. Это относится как собственно к обработке почвы, при которой процессы возделывания, внесения удобрений и уборки урожая согласуются с условиями и историей использования конкретного поля, так и к сельскохозяйственным машинам, которые должны обрабатывать поля в кратчайшие сроки, не должны простаивать и должны применяться таким образом, чтобы при этом не потребовалось внеочередное техобслуживание. Наконец, необходимо добиться максимальной прозрачности урожайности, экономичности и затрат, в том числе, в технико-экономической области.
Этих целей можно достичь, в частности, путем максимально полного сбора данных при выполнении сельскохозяйственных рабочих процессов и централизованного пакетирования и анализа этих данных. Для сбора и передачи этих данных на уровне техники, в частности, из патентной заявки DE 10120173 A1, известны телеметрические устройства, служащие для определения состояния. Под «определением состояния» в данном случае понимается определение и предоставление значений состояния в целом, причем эти значения описывают состояние автопоезда или части автопоезда. Такой автопоезд состоит, как правило, из трактора с собственным приводом и, по меньшей мере, одного прицепного агрегата, буксируемого этим трактором и управляемого трактором или блоком управления, установленным на прицепном агрегате.
Известное телеметрическое устройство установлено на прицепном агрегате, буксируемом тягачом, и принимает данные измерений от датчиков, которые также установлены на прицепном агрегате. Эти данные измерений впоследствии передаются по радиоканалу на центральный сервер телеметрии.
Вышеупомянутая комбинация тягачей и прицепных агрегатов часто составляется или изменяется по мере необходимости, то есть, может меняться под любую задачу или в процессе выполнения задачи. Недостатком известного телеметрического устройства считается то, что каждый прицепной агрегат передает свои собственные данные измерений на центральный сервер телеметрии независимо от данных измерений других сельскохозяйственных машин, включенных в тот же автопоезд.
В указанной выше ситуации трудно получить подобные данные, которые могут быть получены только путем, в частности, одновременного рассмотрения данных измерений нескольких машин, входящих в состав автопоезда. Для этого приходятся привязывать друг к другу данные измерений, полученные от различных машин, руководствуясь более или менее правдоподобными и, тем самым, не очень достоверными предположениями. Например, затруднения вызывает даже дополнительная синхронизация по времени данных измерений, полученных от различных машин. Анализ, основанный на таких предположениях, может дать лишь ограниченно пригодные к использованию результаты.
Раскрытие изобретения
Задачей изобретения является усовершенствование телеметрического устройства для определения состояния, устанавливаемого на сельскохозяйственном автопоезде и известного на уровне техники, таким образом, чтобы можно было улучшить анализ полученных и переданных на сервер телеметрии значений состояния.
Эта задача, относящаяся к телеметрическому устройству согласно ограничительной части пункта 1 формулы изобретения, решается признаками, раскрываемыми в характеристической части пункта 1 формулы.
Задача, относящаяся к электронному блоку согласно ограничительной части пункта 12 формулы изобретения, решается признаками, раскрываемыми в характеристической части пункта 12 формулы.
Задача, относящаяся к сельскохозяйственному автопоезду, решается признаками, раскрываемыми в пункте 13 формулы.
Задача, относящаяся к способу определения состояния согласно ограничительной части пункта 14 формулы изобретения, решается признаками, раскрываемыми в характеристической части пункта 14 формулы.
Задача, относящаяся к компьютерной программе, решается признаками, раскрываемыми в пункте 15 формулы.
Важное значение имеет группировка значений состояния, независимо полученных от каждой из сельскохозяйственных машин автопоезда, включая тягач, перед передачей на сервер телеметрии. Это нужно для формирования из сгруппированных данных набора телеметрии для передачи на сервер телеметрии.
Группировка значений состояния, имеющих различное происхождение, приводит к тому, что обзор значений состояния, имеющих различное происхождение, позволяет регулярно получать расширенное представление об общем состоянии автопоезда. Ранее, когда можно было опираться только на значения состояния, относящиеся к единственному компоненту, это было бы невозможно. Таким образом, определенное событие, например, засорение плуга, может отражаться в значениях состояния как тягача, так и прицепного агрегата, в данном случае, плуга. За счет группировки данных тягача с данными прицепных агрегатов и перевода сгруппированных данных в формат передаваемого набора телеметрии повышается информативность полученных данных значений состояния, причем необходимость в дополнительных физических измерениях не возникает.
В предпочтительном варианте исполнения, раскрываемом в пункте 2 формулы, предусматривается группировка полученных значений состояния в общем и целом с учетом их взаимосвязи по времени, в частности, с учетом одновременности (или близости по времени) их поступления.
Согласно пункту 3, каждый набор телеметрии, по меньшей мере, приблизительно основывается на единовременной регистрации всех значений состояния.
Предпочтительный вариант исполнения, описываемый в пункте 5 формулы, предусматривает регулярное обновление данных, переданных на сервер телеметрии.
Различные машины могут оснащаться самыми разнообразными инструментами, датчиками и оборудованием и, тем самым, могут выдавать самые разнообразные данные. С течением времени варианты оснащения могут изменяться путем установки дополнительного навесного оборудования или переоснащения. Для обеспечения долгосрочной гибкости при взаимодействии с различными рабочими машинами предпочтительный вариант исполнения изобретения, описываемый в пункте 6 формулы, предлагает динамическое использование файлов определений, которые задают спецификацию интерфейса передачи данных для прицепного агрегата и, в частности, спецификацию данных измерений, предоставляемых прицепным агрегатом, характеризуют и детально описывают эти данные. Это позволяет гибко реагировать на оснащение прицепного агрегата, например, дополнительным измерительным инструментом.
Чаще всего используемые сельскохозяйственные машины являются серийной продукцией. Согласно пункту 7 формулы, использование уникального идентификатора машины позволяет серверу телеметрии контролировать каждую конкретную машину в течение всего срока ее службы и отличать ее от других машин той же серии.
Для обеспечения полного контроля со стороны сервера телеметрии важно, чтобы значимые зарегистрированные события описывались дополнительными данными измерений, относящимися к этому событию. Предпочтительный вариант исполнения изобретения, раскрываемый в пункте 8 формулы, предусматривает механизм, обеспечивающий передачу полного набора телеметрии для таких событий.
Предпочтительные варианты исполнения изобретения, раскрываемые в пунктах 9 и 10 формулы, отличаются особыми преимуществами, связанными с дополнительным оснащением тягача телеметрическим устройством, описываемым изобретением.
Краткое описание графических материалов
Изобретение детально поясняется ниже на основании фигур, на которых изображен вариант исполнения изобретения. На фигурах изображено:
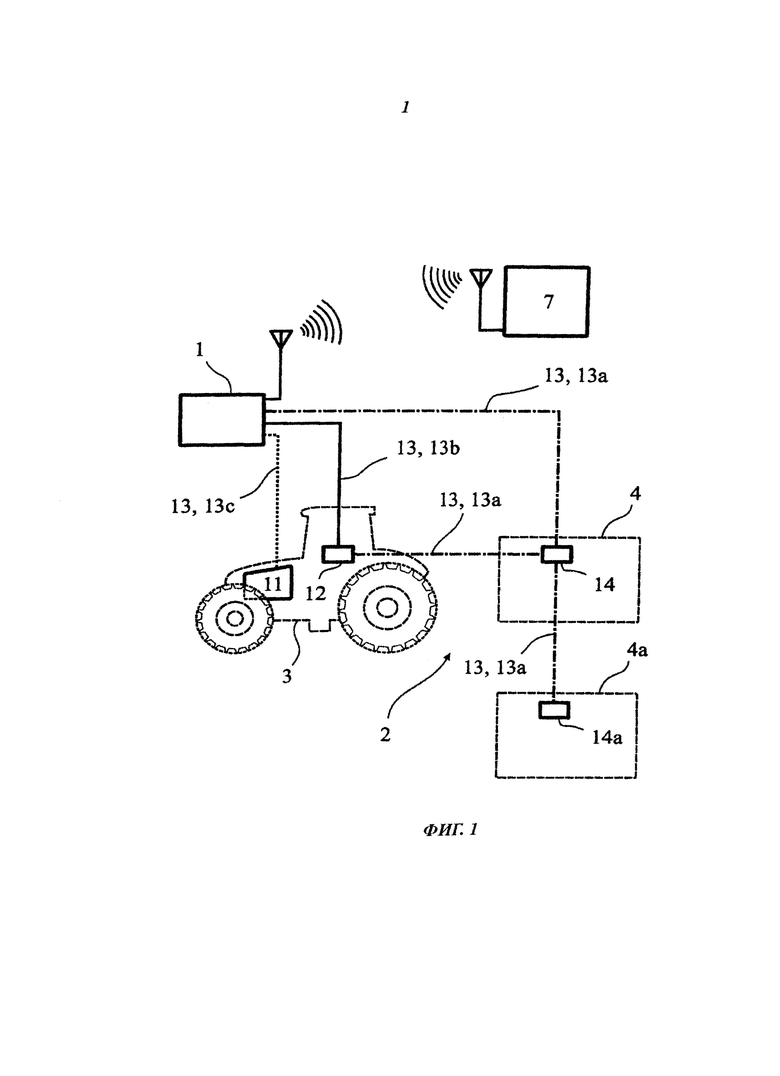
Фигура 1: схематичный вид описываемого изобретением автопоезда с тягачом, на котором установлено телеметрическое устройство согласно изобретению, а также с двумя прицепными агрегатами.
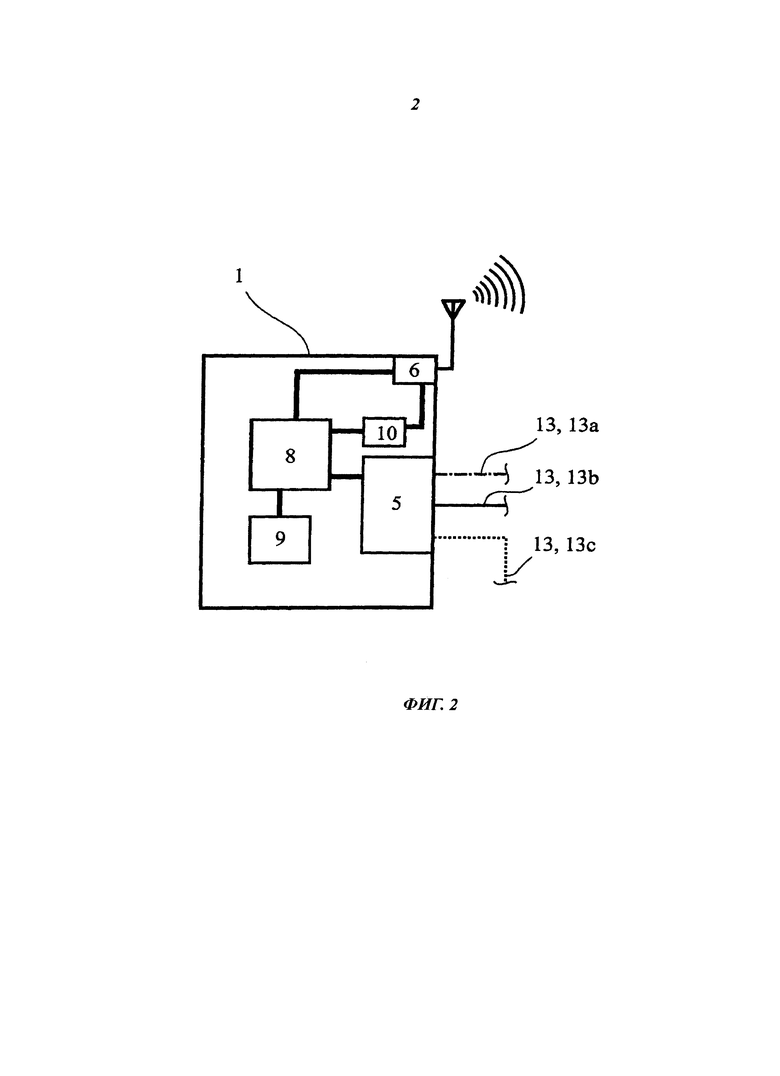
Фигура 2: блок-схема предлагаемого телеметрического устройства.
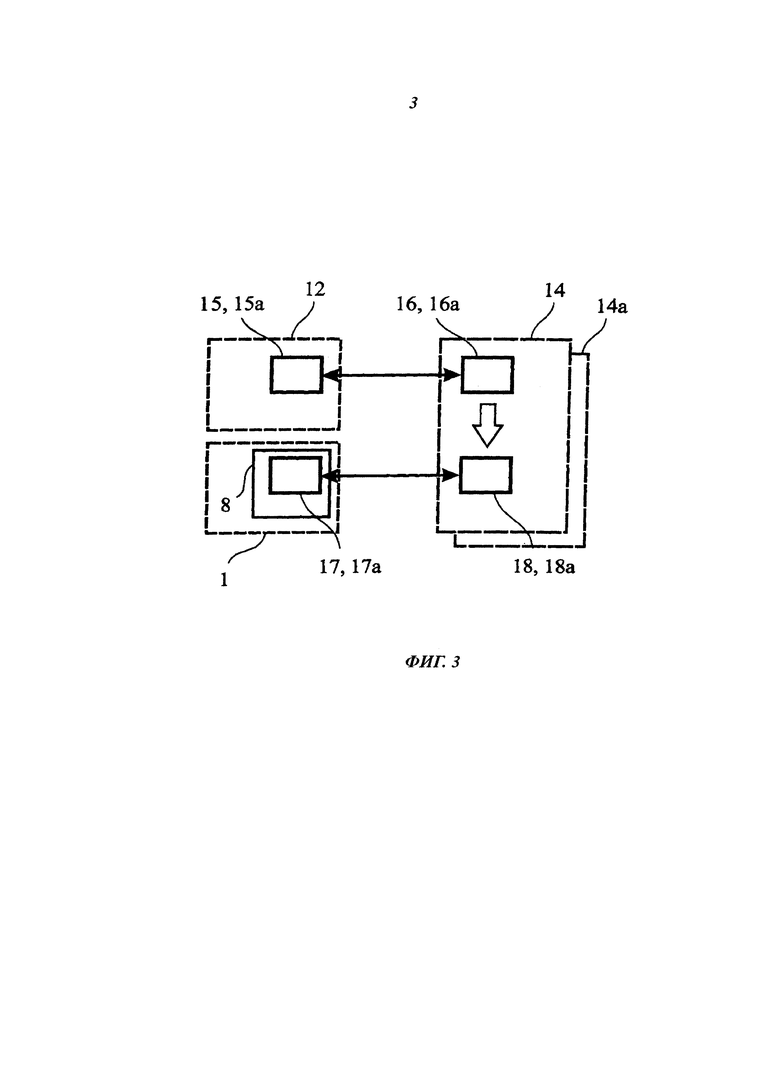
Фигура 3: блок-схема обмена данными между телеметрическим устройством согласно изобретению и двумя прицепными агрегатами.
Осуществление изобретения
Телеметрическое устройство 1 согласно изобретению, представленное на фигурах 1 и 2, служит для сбора значений состояния сельскохозяйственного автопоезда 2, показанного на фигуре 1. Под значениями состояния в этом смысле понимаются любые измеренные или рассчитанные фактические или заданные значения, в частности, измеренные физические величины, географические координаты, переключающие состояния, показания счетчиков и т.д., а также данные, не имеющие физического характера, в частности, названия, серийные номера и номера версий. Значение состояния означает собственно значение, то есть, число, а не величину или признак, определяющий значение состояния.
Автопоезд, показанный на фигуре 1, содержит тягач 3 с собственным приводом, а также прицепной агрегат 4 и еще один прицепной агрегат, называемый вторым агрегатом 4а. Прицепной агрегат 4 и второй агрегат 4a буксируются тягачом 3. Помимо второго агрегата 4a, могут быть предусмотрены дополнительные прицепные агрегаты.
Согласно изобретению, телеметрическое устройство 1 содержит блок 5 передачи, предназначенный для приема значений состояния от автопоезда 2. Значения состояния регулярно принимаются по протоколу передачи данных.
Кроме того, телеметрическое устройство 1 содержит блок 6 телеметрии, предназначенный для отправки наборов телеметрии на сервер 7 телеметрии, который, как правило, устанавливается в центре управления. Передача данных осуществляется, предпочтительно, беспроводным путем. По существу, сервер 7 телеметрии может также располагаться на тягаче 3.
Кроме того, телеметрическое устройство 1 содержит блок 8 обработки, предназначенный для формирования наборов телеметрии из принятых значений состояния. Этот блок 8 обработки может представлять собой любое вычислительное устройство, способное обрабатывать цифровые данные. В частности, на блоке В обработки могут работать программы, в том числе, операционная система. Формирование наборов телеметрии не должно ограничиваться исключительно принятыми значениями состояния. Напротив, в состав этих наборов могут также входить прочие данные, переменные или правила.
Согласно изобретению, принятые значения состояния содержат как значения состояния тягача, так и значения состояния агрегата. При этом значения состояния тягача представляют собой переданные тягачом 3 значения состояния, которые были измерены или определены на тягаче 3 и соотнесены с ним. Соответственно, значения состояния агрегатов представляют собой значения параметров, переданные прицепным агрегатом, в частности, прицепным агрегатом 4 и измеренные/определенные на прицепном агрегате 4. Допускаются также другие виды значений состояния.
Блок 5 передачи может принимать значения состояния как от тягача 3, так и от прицепного агрегата 4 и второго агрегата 4a. При этом значения состояния могут поступать на блок 5 передачи по различным физическим каналам в зависимости от своего происхождения (тягач 3, прицепной агрегат 4 или второй агрегат 4a).
Кроме того, блок 8 обработки способен группировать принятые значения состояния тягача с принятыми значениями состояния агрегатов, руководствуясь правилами группировки. Такая группировка означает определение группы, к которой логически привязываются эти значения состояния тягача и агрегатов, между которыми также устанавливаются логические связи. При этом подобная группировка может быть реализована произвольным образом. При этом возможно добавление в эту группу других видов значений состояния, а также группировка более одного значения состояния тягача и значения состояния агрегата. Единственное условие: наличие в группе, по меньшей мере, одного значения состояния тягача и значения состояния агрегата.
Кроме того, согласно изобретению, блок 11 обработки способен формировать из сгруппированных значений состояния набор телеметрии на основании правила формирования. Поскольку, как уже было сказано, сгруппированные значения состояния содержат, по меньшей мере, одно принятое значение состояния тягача и одно значение состояния агрегата, то, следовательно, набор телеметрии также формируется на основании, по меньшей мере, одного значения состояния тягача и, по меньшей мере, одного значения состояния агрегата. При этом правило формирования может включать любые виды обработки данных и, предпочтительно, задается заранее. Если группа должна содержать дополнительные значения состояния, то их также можно использовать для формирования набора телеметрии в соответствии с правилом формирования.
Предпочтительно, с каждым значением состояния агрегата, в частности, с каждым значением состояния соотносится свой параметр состояния. В то время как значения состояния (или значение состояния агрегата) представляет собой численное значение измеренной величины или значение серийного номера, параметр состояния представляет собой физическую величину или логическое описание значения состояния агрегата или значения состояния, соотнесенного с этим параметром состояния. Иными словами, значения состояния агрегата или значения состояния представляют собой числа, а параметры состояния описывают значения состояния агрегата или значения состояния, с которыми они соотнесены. При этом с несколькими значениями состояния агрегата, в частности, несколькими значениями состояния, могут быть соотнесены одни и те же параметры состояния, например, в случае выполнения нескольких физических измерений одним и тем же измерительным прибором в различное время. В качестве альтернативы или дополнения с каждым значением состояния тягача может быть соотнесен параметр состояния.
Согласно этому варианту исполнения, телеметрическое устройство 1 содержит блок 9 памяти, предназначенный для хранения последнего принятого значения состояния агрегата, предпочтительно, последнего принятого значения состояния, для каждого параметра состояния. Кроме того, в этом варианте исполнения правило группировки предусматривает группировку между собой количества последних принятых значений состояния агрегата, предпочтительно, количества последних принятых значений состояния, для каждого параметра состояния. Следовательно, при формировании набора телеметрии группа формируется из последних значений состояния агрегата, предпочтительно, последних значений состояния, для каждого параметра состояния. Таким образом, осуществляется автоматическая группировка значений состояния агрегата, предпочтительно, значений состояния, полученных одновременно или, по крайней мере, с небольшим временным промежутком. Благодаря приостановке приема данных в телеметрическое устройство можно пренебречь погрешностью синхронизации встроенных часов тягача 3 и прицепного агрегата 4. В качестве альтернативы или дополнения блок памяти может быть рассчитан на осмысленное хранение значений состояния тягача.
Полное воспроизведение информации, имеющейся на тягаче 3, на сервере 7 телеметрии достигается за счет того, что вся принятая телеметрическим устройством 1 и признанная важной информация передается на сервер 7 телеметрии в необработанном виде. Это возможно, в частности, за счет того, что правило формирования включает сгруппированные значения состояния в набор телеметрии. Таким образом, сгруппированные значения состояния, по меньшей мере, частично, а предпочтительно, полностью передаются в набор телеметрии.
Предпочтительно, значения состояния содержат данные, измеренные рабочим устройством и/или измеренные на обрабатываемой площади. В этом смысле рабочим устройством может быть любое устройство, установленное на тягаче 3 или прицепном агрегате 4, например, серводвигатель. В этом случае измеренным значением может быть, например, измеренный крутящий момент, измеренный ток или измеренная частота вращения. Обрабатываемая площадь представляет собой поле (включая находящиеся на нем объекты или растительность), по которому движется тягач 3, прицепной агрегат 4 или второй агрегат 4a. В этом случае измеренным значением могло бы быть измеренное содержание хлорофилла или измеренный уровень почвы.
В целях периодического обновления данных на сервере 7 телеметрии, предпочтительно, блок 8 обработки выполняется таким образом, чтобы он мог инициировать формирование набора телеметрии и его сохранение в памяти 10 телеметрии с заданной минимальной частотой. При этом сохранение в памяти 10 телеметрии представляет собой подготовительный этап для передачи данных на сервер 7 телеметрии.
Возможности гибкого составления автопоезда повышаются, в частности, за счет того, что телеметрическое устройство не требует наличия предварительной информации о виде, количестве и оснастке, в частности, прицепных агрегатов 4. Это может быть реализовано, в частности, за счет того, что соответствующая информация передается прицепным агрегатом 4 на телеметрическое устройство 1 только при запуске последнего. Предпочтительно, блок 8 обработки настроен на прием идентифицирующих данных агрегата, в частности, предпочтительно, после запуска и перед приемом значения состояния. Предпочтительно, блок 6 телеметрии способен передавать идентифицирующие данные агрегата на сервер 7 телеметрии. Таким образом, сервер 7 телеметрии может динамически настраиваться на изменение конфигурации.
Под идентифицирующими данными агрегата может пониматься, например, последовательность данных в формате XML, которая исчерпывающе описывает параметры коммуникации тягача 3 или соответствующего прицепного агрегата 4 и, в частности, детально характеризует переданные значения состояния с точки зрения их внутреннего деления, длины, характера, связи с физическими единицами измерения и т.д. по заданной схеме.
Следовательно, в предпочтительном варианте, идентифицирующие данные агрегата соотносят с каждым значением состояния агрегата соответствующий параметр состояния. В частности, эта информация может быть также закодирована в последовательности данных в формате XML. Кроме того, идентифицирующие данные агрегата могут содержать информацию о том, какие из принятых данных должны считаться значениями состояния, в частности, значениями состояния агрегата при формировании набора телеметрии. В контексте шины ISO по стандарту ISO 11783 такие идентифицирующие данные агрегата называются также объектом описания агрегата или файлом описания машины. Согласно стандарту ISO 11783, в этом объекте описания агрегата поле DevlceProcessDataProperty каждого объекта DeviceProcessData, который соответствует значению состояния, определяет, относится ли соответствующее значение состояния к базовым данным измерений и протоколируется ли оно самостоятельно прицепным агрегатом 4. Те значения состояния, для которых справедливо вышесказанное, могут рассматриваться как подлежащие обработке значения состояния в смысле изобретения.
Для полного контроля прицепного агрегата 4 в течение длительного периода времени важно иметь возможность однозначного соотнесения наборов телеметрии или их соответствующих частей, принятых сервером 7 телеметрии, с определенным прицепным агрегатом 4, даже если этот прицепной агрегат был заменен в процессе выполнения задачи на другой прицепной агрегат, который может иметь идентичную конструкцию. Для этого, выгодным образом, в состав идентифицирующих данных агрегата входит уникальный идентификатор машины. При этом речь может идти о серийном номере, аналогичном известному VIN-номеру для автомобильного транспорта, который, в том числе, однозначно определяет производителя. Предпочтительно, этот идентификатор также включается в состав сформированного набора телеметрии.
Чтобы обеспечить возможность мгновенной регистрации всех значений состояния в момент изменения определенного состояния, может быть выгодным вариант, в котором идентифицирующие данные агрегата назначают некий параметр состояния параметром срабатывания, причем блок 8 обработки выполнен таким образом, чтобы при приеме значения состояния, параметр состояния которого назначен параметром срабатывания, он инициировал формирование набора телеметрии и его сохранение в памяти 10 телеметрии. Таким образом, набор телеметрии формируется и пересылается немедленно после изменения значения состояния, которое было определено как параметр срабатывания.
Параметр состояния может быть назначен параметром срабатывания за счет того, что идентифицирующие данные агрегата предусматривают отправку соответствующих значений состояния в случае изменения значения состояния со стороны прицепного агрегата 4. В файле описания машины согласно стандарту ISO 11783 назначение параметра состояния параметром срабатывания соответствует присвоению значения «on change» («при изменении») полю DataLogMethod соответствующего объекта DataLogTrigger.
Далее, выгодным образом, можно задать минимальный интервал (также посредством идентифицирующих данных агрегата), в пределах которого даже при повторном изменении значения состояния, параметр состояния которого назначен параметром срабатывания, инициация повторного формирования набора телеметрии будет блокироваться.
Предпочтительно, решение, предлагаемое изобретением, может также применяться в случае включения в автопоезд 2 нескольких прицепных агрегатов, как показано, в частности, на фигуре 1. При этом предусматривается, что автопоезд 2 включает в качестве дополнительного прицепного агрегата второй агрегат 4a, причем значения состояния, принятые блоком 5 передачи, также включают значения состояния второго агрегата, а блок 8 обработки рассчитан на группировку, в том числе, принятого значения состояния второго агрегата в соответствии с правилом группировки. Значения состояния второго агрегата представляют собой, соответственно, переданные вторым агрегатом 4a и измеренные/определенные на втором агрегате 4a значения или значения, соотнесенные со вторым агрегатом 4a. Благодаря тому, что в группировке участвует, по меньшей мере, одно значение состояния второго агрегата, набор телеметрии формируется, в том числе, на основании значения состояния второго агрегата.
Если телеметрическое устройство 1 должно устанавливаться на тягач 3 в рамках переоснащения, то этот тягач 3 (как показано на фигуре 1) помимо своего приводного устройства 11 содержит, как правило, электронный блок 12 управления приводом, который управляет тягачом 3, прицепным агрегатом 4 и имеющимся в данном случае вторым агрегатом 4a, и обменивается с ними данными. В этом случае, предпочтительно, блок 5 передачи рассчитан на прием значений состояния по нескольким физическим каналам 13. В частности, выгоден вариант, в котором блок 5 передачи способен принимать значения состояния тягача по нескольким физическим каналам 13.
Кроме того, предпочтительно, в число физических каналов 13 входит ISO-шина 13a. ISO-шина 13a соответствует стандарту ISO 11783 и имеется в электронном блоке 12 управления тягача 3, электронном блоке 14 управления прицепного агрегата 4 и в электронном блоке 14a управления второго агрегата 4a.
Предпочтительно, телеметрическое устройство 1 дополнительно содержит шину 13b блока управления, соединенную с электронным блоком 12 управления тягача, и шину 13 с двигателя, соединенную с приводным устройством 11. В данном случае шина 13b блока управления использует разработанный производителем протокол на основе CAN, а шина 13c двигателя - протокол J1939. Таким образом, телеметрическое устройство 1, с одной стороны, может использовать уже разработанный и внедренный интерфейс связи с электронным блоком 14 управления согласно стандарту ISO 11783, а с другой стороны, в то же время иметь непосредственный доступ к значениям состояния, которые могут сниматься с тягача 3. Таким образом, телеметрическое устройство 1 способно принимать значения состояния тягача как по ISO-шине 13a, так и по шине 13b блока управления и шине 13 с двигателя.
На фигуре 3 представлен предпочтительный вариант коммуникации между блоком 8 обработки и электронным блоком 12 управления тягача, расположенными на тягаче 3, и электронным блоком 14 управления агрегата, расположенным на прицепном агрегате 4, в соответствии с ситуацией, показанной на фигуре 1. Электронный блок 14 управления агрегата представляет собой центральную систему управления и контроля прицепного агрегата 4.
Для контроля прицепного агрегата 4 посредством электронного блока 14 управления агрегата на электронном блоке 12 управления тягача работает процесс 15 управляющих данных, который реализует контроллер 15a задач в смысле части 10 стандарта ISO 11783. Он рассчитан на активизацию соответствующей структуры 16 управления агрегатом, которая образует виртуальный интерфейс на уровне программного обеспечения и осуществляет рабочий набор 16a (также называемый клиентом управления задачами) в смысле части 10 стандарта ISO 11783, в электронном блоке 14 управления агрегата согласно стандарту ISO 11783 и на управление прицепным агрегатом 4 указанным способом. Такая активизация осуществляется при помощи обмена данными и может использовать, по существу, передачу данных, ориентированную на соединение или пакетную передачу.
На телеметрическом устройстве 1 и, в частности, на блоке 8 обработки работает процесс 17 протоколирования, который обменивается данными с соответствующей структурой 18 протоколирования, которая также образует виртуальный интерфейс на уровне программного обеспечения, в электронном блоке 14 управления агрегата согласно стандарту ISO 11783. Этот обмен данными также может быть ориентирован на соединение или на пакетную передачу. При этом процесс 17 протоколирования не создает контроллера задач, но создает регистрирующее устройство 17a в виде расширения функционального класса в смысле стандарта ISO 11783, то есть, создает функциональный класс, который, хотя и не специфицирован в стандарте ISO 11783, но укладывается в рамки разрешенного стандартом расширения.
Чтобы исключить необходимость активизации рабочего набора 16a (то есть, так называемого клиента управления задачами) процессом 17 протоколирования, структура 18 протоколирования реализует клиент 18a регистрации данных, соответствующий функциональному классу регистрирующего устройства 17a.
При этом структура 18 протоколирования после повторного пуска или инициализации сначала передает идентифицирующие данные агрегата, в данном случае - конкретно объект описания агрегата согласно стандарту ISO 11783, в процесс 17 протоколирования, после чего регулярно и самостоятельно передает значения состояния, подлежащие протоколированию согласно идентифицирующим данным агрегата по базовым настройкам, в процесс 17 протоколирования. При этом, предпочтительно, идентифицирующие данные агрегата идентичны идентифицирующим данным агрегата, переданным структурой 16 управления агрегатом в процесс 15 управления согласно стандарту ISO 11783. В альтернативном варианте идентифицирующие данные агрегата отличаются от данных, переданных структурой 16 управления агрегатом в процесс 15 управления. При этом структура 16 управления агрегатом и структура 18 протоколирования имеют доступ к тем же самым данным на электронном блоке 14 управления.
Соответственно, описываемый изобретением электронный блок 14 управления агрегатом для сельскохозяйственного прицепного агрегата 4 со структурой 16 управления агрегатом, которая реализует логический интерфейс, предпочтительно, рабочий набор 16a, для активизации электронного блока 14 управления, отличается тем, что электронный блок 14 управления агрегатом рассчитан на обмен данными с блоком 5 передачи телеметрического устройства 1, описываемого изобретением. Согласно изобретению, этот электронный блок 14 управления агрегатом содержит структуру 18 протоколирования, которая реализует отдельный логический интерфейс для передачи (предпочтительно, самостоятельной) значений состояния прицепного агрегата 4 на блок 5 передачи.
Такое разделение на структуру 16 управления агрегатом и структуру 18 протоколирования выгодно тем, что для протоколирования не требуется вмешиваться во взаимодействие между контроллером 15a задач и клиентом управления задачами или рабочим набором 16a. В существующую систему, в которой возможен подобный обмен данными между электронным блоком 12 управления тягача и электронным блоком 14 управления агрегата, можно легко добавит телеметрическое устройство 1, которое не затрагивает в целях выполнения своего протоколирования имеющийся канал обмена данными, но использует его базовые механизмы.
Под логическим интерфейсом в смысле изобретения понимается программный или виртуальный интерфейс. Соответственно, для наличия отдельного подобного интерфейса в смысле изобретения будет достаточно, если структура 16 управления агрегатом и структура 18 протоколирования будут представлять собой отдельные интерфейсы на программном уровне. В случае отдельного подчиненного физического слоя неизбежно появились бы различия в логических интерфейсах.
Учитывая, что электронный блок 12 управления тягача и телеметрическое устройство 1 в предлагаемом варианте представляют собой отдельные устройства (что, впрочем, не обязательно), неизбежно разделение процесса 15 управления и процесса 17 протоколирования.
Кроме того, описываемый изобретением сельскохозяйственный автопоезд, показанный, в частности, на фигуре 1, включает тягач 3 и прицепной агрегат 4, а также телеметрическое устройство 1, описываемое изобретением. Предпочтительно, прицепной агрегат 4 содержит электронный блок 14 управления, предназначенный для обмена данными с блоком 5 передачи. Согласно данному предпочтительному варианту исполнения, этот блок рассчитан на самостоятельную передачу значений состояния агрегата на блок 5 передачи, причем особенно предпочтительно осуществление такой передачи с заданной минимальной частотой.
Чтобы обеспечить описанное динамическое изменение конфигурации автопоезда 2, в следующем предпочтительном варианте электронный блок 14 управления выполнен таким образом, чтобы он после запуска и до пересылки значения состояния, в частности, значения состояния агрегата, отправлял на блок 5 передачи сообщение об инициализации, которое, предпочтительно, содержит идентифицирующие данные агрегата.
Как уже говорилось в связи с телеметрическим устройством 1 согласно изобретению и в связи с фигурой 1, автопоезд может включать второй прицепной агрегат, а именно, второй агрегат 4a с электронным блоком 14a управления вторым агрегатом. Электронный блок 14a управления вторым агрегатом является для второго агрегата центральным устройством управления и контроля, аналогично электронному блоку 14 управления для прицепного агрегата 4. Электронный блок 14a управления вторым агрегатом также подсоединен к ISO-шине 13a. Аналогично электронному блоку 14 управления агрегатом, электронный блок 14a управления вторым агрегатом имеет виртуальные интерфейсы в форме структуры управления агрегатом и структуры протоколирования, обладающие аналогичной функциональностью. Эти интерфейсы электронного блока 14a управления вторым агрегатом независимо от электронного блока 14 управления агрегатом обмениваются данными со своими абонентами, а именно, с процессом 15 управления и процессом 17 протоколирования. Обмен данными осуществляется аналогично электронному блоку управления агрегатом.
При этом идентифицирующие данные второго агрегата 4a могут быть полностью (за исключением уникального идентификатора машины) совпадать с идентифицирующими данными прицепного агрегата 4, что имеет место в том случае, если прицепной агрегат 4 и второй агрегат 4a имеют идентичную конструкцию. В альтернативном варианте, в котором второй агрегат 4a отличается от прицепного агрегата 4, различаются и идентифицирующие данные агрегатов. В остальном, все определения, относящиеся к электронному блоку 14 управления агрегатом, остаются справедливыми в отношении электронного блока 14a управления вторым агрегатом. Аналогичным образом в состав автопоезда могут быть включены дополнительные прицепные агрегаты.
Описываемый изобретением способ определения состояния сельскохозяйственного автопоезда, в состав которого входит тягач 3 и прицепной агрегат 4, содержит этапы приема значений состояния, формирования наборов телеметрии и передачи наборов телеметрии на сервер телеметрии, и отличается тем, что принятые значения состояния включают значения состояния как тягача, так и прицепного агрегата. Способ, описываемый изобретением, включает также этап группировки принятых значений состояния тягача с принятыми значениями состояния агрегата на основании правила группировки, причем набор телеметрии формируется в соответствии с правилом формирования из сгруппированных значений состояния.
Компьютерная программа, описываемая изобретением, содержит программный код, предназначенный для осуществления всех этапов способа, описываемого изобретением, при исполнении компьютерной программы на компьютере.
Прочие предпочтительные варианты исполнения электронного блока управления согласно изобретению, сельскохозяйственного автопоезда согласно изобретению, способа согласно изобретению и компьютерной программы согласно изобретению вытекают из предпочтительных вариантов исполнения телеметрического устройства согласно изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПОЕЗД | 2012 |
|
RU2539702C2 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ДЛЯ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ СОЧЛЕНЕННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СЕЛЬСКОХОЗЯЙСТВЕННОЕ СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2778452C2 |
| АВТОПОЕЗД | 2013 |
|
RU2543130C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ СОСТОЯНИЯ КОНТАКТИРОВАНИЯ ШТЕПСЕЛЕЙ | 2009 |
|
RU2498910C2 |
| СПОСОБ РАБОТЫ ТЕРМИНАЛА ПОЛЬЗОВАТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ И СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2018 |
|
RU2779880C2 |
| Устройство управления автопоездом | 1982 |
|
SU1102701A1 |
| Автопоезд | 1989 |
|
SU1689185A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Система беспроводного управления включением световых сигналов радиоуправляемых фонарей телеги автопоезда | 2019 |
|
RU2712368C1 |
Изобретение относится к сельскохозяйственной технике. Телеметрическое устройство для сбора значений состояния сельскохозяйственного автопоезда, в состав которого входит тягач и прицепной агрегат, содержит блок передачи для приема значений состояния от автопоезда, блок телеметрии для беспроводной отправки наборов телеметрии на сервер телеметрии и блок обработки для формирования наборов телеметрии из принятых значений состояния. Принятые значения состояния содержат как значения состояния тягача, так и значения состояния прицепного агрегата. Блок обработки выполнен с возможностью группировать принятые значения состояния тягача с принятыми значениями состояния агрегата на основании заранее заданного правила группировки и формировать из сгруппированных значений состояния набор телеметрии на основании правила формирования. Улучшается анализ переданных значений. 4 н. и 10 з.п. ф-лы, 3 ил.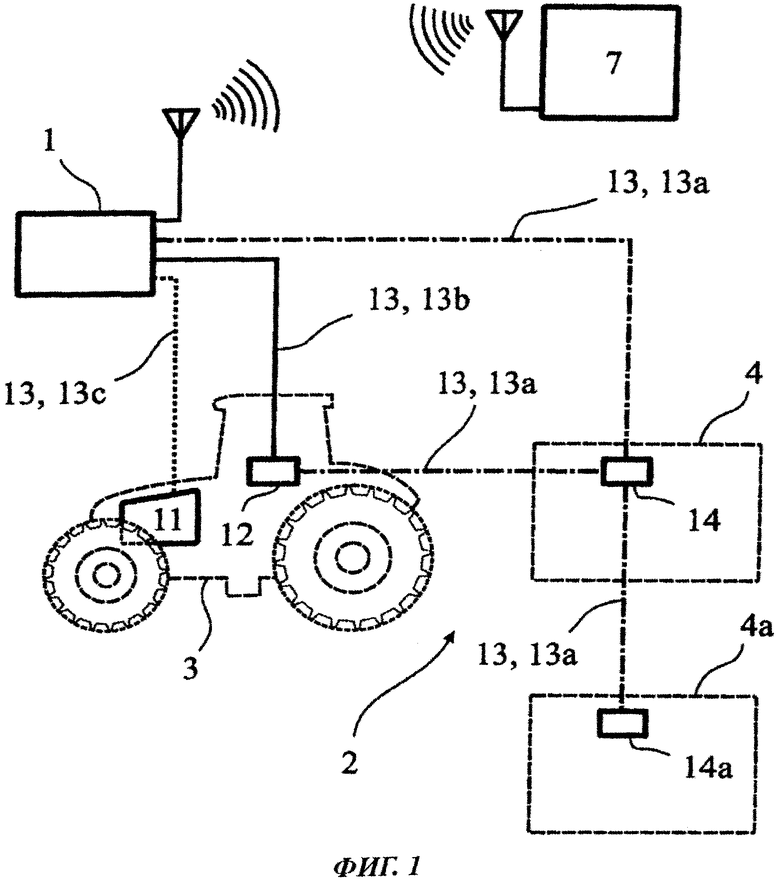
1. Телеметрическое устройство (1) для сбора значений состояния сельскохозяйственного автопоезда (2), в состав которого входит тягач (3) и прицепной агрегат (4), причем телеметрическое устройство (1) содержит блок (5) передачи для приема значений состояния от автопоезда (2), блок (6) телеметрии для отправки, предпочтительно беспроводной, наборов телеметрии на сервер (7) телеметрии и блок (8) обработки для формирования наборов телеметрии из принятых значений состояния, отличающееся тем, что принятые значения состояния содержат как значения состояния тягача (3), так и значения состояния прицепного агрегата (4), причем блок (11) обработки выполнен с возможностью группировать принятые значения состояния тягача с принятыми значениями состояния агрегата на основании, предпочтительно, заранее заданного правила группировки и формировать из сгруппированных значений состояния набор телеметрии на основании правила формирования.
2. Телеметрическое устройство по п.1, отличающееся тем, что правило группировки предусматривает включение в одну группу значений состояния, состоящих между собой в предварительно заданной взаимосвязи по времени.
3. Телеметрическое устройство по п.1, отличающееся тем, что с каждым значением состояния агрегата, предпочтительно с каждым значением состояния, соотнесен свой параметр состояния, причем телеметрическое устройство (1) содержит блок (9) памяти для хранения последнего принятого значения состояния агрегата, предпочтительно последнего принятого значения состояния, для каждого параметра состояния, а правило группировки предусматривает включение в одну группу количества последних принятых значений состояния агрегата, предпочтительно последних принятых значений состояния, для каждого параметра состояния.
4. Телеметрическое устройство по п.1, отличающееся тем, что значения состояния содержат данные, измеренные рабочим устройством и/или измеренные на обрабатываемой площади.
5. Телеметрическое устройство по п.1, отличающееся тем, что блок (8) обработки выполнен таким образом, чтобы он мог инициировать формирование набора телеметрии и его сохранение в памяти (10) телеметрии с заданной минимальной частотой.
6. Телеметрическое устройство по п.1, отличающееся тем, что блок (11) обработки настроен на прием идентифицирующих данных агрегата, предпочтительно после запуска и перед приемом значения состояния, причем идентифицирующие данные агрегата соотносят с каждым значением состояния агрегата соответствующий ему параметр состояния.
7. Телеметрическое устройство по п.6, отличающееся тем, что в состав идентифицирующих данных агрегата входит уникальный идентификатор машины.
8. Телеметрическое устройство по п.6 или 7, отличающееся тем, что идентифицирующие данные агрегата назначают параметр состояния параметром срабатывания, причем блок (8) обработки выполнен таким образом, чтобы при приеме значения состояния, параметр состояния которого назначен параметром срабатывания, он инициировал формирование набора телеметрии и его сохранение в памяти (10) телеметрии.
9. Телеметрическое устройство по п.1, отличающееся тем, что автопоезд (2) включает в качестве дополнительного прицепного агрегата второй агрегат (4а), причем принятые значения состояния также включают значения состояния второго агрегата, а блок (8) обработки рассчитан на группировку, в том числе, принятого значения состояния второго агрегата в соответствии с правилом группировки.
10. Телеметрическое устройство по п.1, отличающееся тем, что блок (5) передачи рассчитан на прием значений состояния по нескольким физическим каналам (13), предпочтительно на прием значений состояния тягача по нескольким физическим каналам (13).
11. Телеметрическое устройство по п.10, отличающееся тем, что в число физических каналов (13) входит ISO-шина (13a), предпочтительно, дополненная шиной (13b) блока управления, соединенной с электронным блоком (12) управления тягача, и шиной (13c) двигателя, соединенной с двигателем и/или приводным устройством.
12. Электронный блок (14) управления прицепным агрегатом (4) со структурой (16) управления агрегатом, которая образует логический интерфейс, предпочтительно, рабочий набор (16a), для активизации электронного блока (14) управления агрегатом, отличающийся тем, что электронный блок (14) управления выполнен с возможностью обмена данными с блоком (5) передачи телеметрического устройства (1), охарактеризованного в одном из пп. 1-11, причем электронный блок (14) управления агрегатом содержит структуру (28) протоколирования, которая реализует отдельный логический интерфейс для передачи, предпочтительно самостоятельной, значений состояния прицепного агрегата (4) на блок (5) передачи.
13. Сельскохозяйственный автопоезд (2), в состав которого входит тягач (3) и прицепной агрегат (4), содержащий телеметрическое устройство (1), охарактеризованное в одном из пп. 1-11, отличающийся тем, что прицепной агрегат (4) содержит электронный блок (14) управления для обмена данными с блоком (5) передачи, причем электронный блок (14) управления выполнен с возможностью самостоятельной передачи значений состояния агрегата на блок (5) передачи, в частности, с заданной минимальной частотой.
14. Способ определения состояния сельскохозяйственного автопоезда, в состав которого входит тягач (3) и прицепной агрегат (4), содержащий этапы приема значений состояния, формирования наборов телеметрии и передачи наборов телеметрии на сервер телеметрии, отличающийся тем, что принятые значения состояния включают значения состояния как тягача (3), так и прицепного агрегата (4), причем способ включает этап группировки принятых значений состояния тягача с принятыми значениями состояния агрегата на основании, предпочтительно, заранее заданного правила группировки, а набор телеметрии формируют в соответствии с правилом формирования из сгруппированных значений состояния.
| US 2005071124 A1, 31.03.2005 | |||
| US 2006229777 A1, 12.10.2006 | |||
| US 8140358 B1, 20.03.2012 | |||
| US 2005062590 A1, 24.03.2005. |

