Область техники, к которой относится изобретение
Данное изобретение относится к обнаружению условий роста растений в субстратах для роста растений. В частности, но не исключительно, данное изобретение относится к устройствам, предназначенным для использования с искусственными субстратами для роста растений, такими как субстраты из минеральной ваты.
Уровень техники
В последние годы организация и ориентация роста растений стали более специализированными и тщательнее разработанными. Ввиду того, что стратегии ирригации после их внедрения начинали повсеместно применяться с общей целью просто компенсировать недостаток дождевой воды, растения получают нарастающую подпитку водой в малых группах или даже по отдельности с целью тщательного управления условиями роста растений.
Например, признано, что стратегии ирригации могут оказывать качественное влияние на рост растений. Как стало ясно в данной области техники, генеративным ростом называют рост того типа, при котором стимулируется получение цветков или плодов, а во время вегетативного роста получается растение с большей долей листьев, чем других зеленых элементов. Генеративный рост стимулируется, когда растение имеет относительный недостаток воды и/или питательных веществ, а вегетативный рост стимулируется изобилием воды и/или питательных веществ. Вегетативный рост дает большее увеличение суммарной биомассы растения, а генеративный рост увеличивает долю роста, которая вносит вклад в получение плодов или цветков.
Поэтому можно заметить, что тщательное управление условиями роста растений можно использовать для ориентации типа роста на желаемый результат. Вместе с тем, если надлежит достичь управления на этом относительно точном уровне, то измерение условий роста растений является «узким местом».
Один конкретный контекст, в котором такое точное управление предложено, - это выращивание растений в необходимых для роста субстратах из минеральной ваты. Такие субстраты для роста обычно предусматриваются в виде связной пробки, брикета, плиты или коврика/кошмы, и в общем случае включают в себя связующее, обычно органическое связующее, чтобы придать изделию структурную целостность.
Как правило, организация процесса роста растения осуществляется в два этапа: первый этап, на котором растение выращивают из семени, организует «распространитель», а второй этап, во время которого поддерживают темпы роста растения и собирают какой-либо урожай, организует «растениевод». Например, в случае томата, распространитель может проращивать отдельные семена томата в цилиндрических пробках, имеющих толщину порядка 25-30 мм и радиус примерно 20-30 мм. После прорастания семени распространитель размещает пробку внутри прямоугольного брикета, чтобы обеспечить дальнейший рост корневой системы и растения. После этого, за отдельным растением внутри брикета ухаживают, пока не наступает этап, на котором распространитель может передать его растениеводу.
После получения их от распространителя, растениевод размещает некоторое количество брикетов на одной плите из минеральной ваты, чтобы сформировать систему для выращивания растений. Плита из минеральной ваты, как правило, заключена в фольгу или другой слой, непроницаемый для жидкости, за исключением проемов на верхней поверхности, предназначенных для приема брикетов с растениями, и сливного отверстия, предусмотренного на нижней поверхности.
Во время последующего роста растения, обеспечивают воду и питательные вещества с помощью капельниц, которые подают жидкость, содержащую воду и питательные вещества, в систему - либо непосредственно в брикеты, либо в плиты. Вода и питательные вещества в брикетах и плитах забираются корнями растений, и поэтому растения растут. Вода и питательные вещества, которые на забираются растением, либо остаются в системе субстратов, либо сливаются через сливное отверстие. Сливаемую воду и/или питательные вещества можно дезинфицировать, а потом повторно использовать, если это уместно.
Желательно предусмотреть датчики, которые можно использовать для контроля уровня воды и/или питательных веществ систем этого типа, предназначенных для роста растений. Подходящие датчики уже предложены, а некоторые их примеры описаны в публикации международной заявки WO 2010/031773. На фиг. 1 этого документа показан известный измеритель содержания воды, имеющий три выступающих зонда, которые вводятся в субстрат, чтобы измерить такие параметры, как содержание воды. В документе WO 2010/031773 также описан способ измерения емкости субстрата (из которой можно вывести содержание воды) посредством плоских пластинчатых электродов у поверхности субстрата, а не посредством введения зондов внутрь тела субстрата. В документе EP0392639 описан сенсорный блок с двадцатью внутренними штырьками, имеющий четыре внешних штырька, расположенных вокруг внутренних, для измерения содержания влаги в субстрате. В документе US 2011/0273196 описан беспроводной датчик состояния окружающей среды с тремя или шестью стальными штырями, расположенными с возможностью взаимодействия с почвой в нескольких точках для получения одиночного измерения, отображающего некоторый усредненный параметр почвы, находящейся между штырями, взаимодействующими с почвой.
Хотя эти принципы находят применение, существуют ограничения, накладываемые на информацию, которую можно получить с помощью таких методов. В частности, должно быть ясно, что содержание воды и другие параметры не являются одинаковыми по всему субстрату. То есть обычным будет изменение таких свойств по всему субстрату. Соответственно, попытки измерить содержание воды и уровень питательных веществ исходя из электрического отклика могут оказаться чересчур ограниченными или невоспроизводимыми.
Например, можно ожидать, что действие силы тяжести заставит воду оседать в нижней области субстрата, приводя к увеличенному содержанию воды в нижней области по сравнению с верхней областью. Другие эффекты могут зависеть, например, от местонахождения сливного отверстия или точки, в которой применяется ирригация.
Расчеты дополнительно осложняются параметрами самого субстрата. Например, при попытке увеличить одинаковость содержания воды, предложено предусматривать субстраты, образованные из слоев, имеющих различающиеся плотности. Обладающий большей плотностью верхний слой субстрата может увеличивать относительное содержание воды в этой области. Как бы то ни было, содержание воды остается изменяющимся по всему субстрату, затрудняя надежную и состоятельную оценку общих условий.
Более точное управление условиями роста растений требует усовершенствованного измерения этих условий. Существует нарастающее желание оценивать такие условия точно, надежно и так, чтобы можно было разработать стратегии роста растений, которые работают оптимальным образом.
Раскрытие изобретения
В соответствии с первым аспектом данного изобретения, предложено устройство для обнаружения условий роста растений в пределах субстрата для роста растений, содержащее:
первый линейный массив из одного или более зондов для введения в субстрат;
второй линейный массив из одного или более зондов для введения в субстрат, причем второй линейный массив находится на фиксированном расстоянии от первого линейного массива; и
блок управления, выполненный с возможностью получения первого измерения по меньшей мере одного параметра субстрата на первом уровне субстрата из первой линейного массива зондов и второго измерения упомянутого по меньшей мере одного параметра субстрата на втором уровне субстрата из второго линейного массива зондов,
при этом блок управления также выполнен с возможностью объединения первого и второго измерений, полученных на первом и втором уровнях субстрата, для вычисления по меньшей мере одного условия роста растений субстрата в зависимости из первого и второго измерений.
В отличие от обычных датчиков, предназначенных для использования при обнаружении условий роста растений, устройство согласно первому аспекту получает несколько измерений по меньшей мере одного параметра субстрата. Два линейных массива зондов предусмотрены расположенными через фиксированный промежуток друг от друга, позволяя получать два измерения в разных местах в пределах субстрата. Под «линейным» массивом зондов следует понимать то, что зонды в одном массиве размещены приблизительно на одном и том же расстоянии от зондов, образующих другой массив, чтобы вследствие этого измерять некоторый параметр на уровне субстрата. Поскольку относительные положения этих мест фиксированы (и соответствуют расстоянию между двумя разными уровнями в субстрате), условия в пределах субстрата можно заданным образом моделировать исходя из упомянутых двух измерений, чтобы обеспечить возможность более ясного и более точного понимания условий роста растений, устанавливаемых в пределах субстрата. А именно, считывая два измерения, например, на разных глубинах в субстрате, можно обеспечить улучшенное вычисление истинных условий роста растений, когда эти условия изменяются по всему субстрату, в частности в вертикальном направлении.
В промежутке между применениями, возможно регулирование расстояния между линейными массивами прежде, чем это расстояние зафиксируют во время работы. Однако в предпочтительном варианте осуществления, расстояние между линейными массивами является постоянно фиксированным.
В предпочтительных вариантах осуществления, каждый массив содержит по меньшей мере два зонда. В более предпочтительном варианте, зонды в каждом массиве содержат по меньшей мере два электрода. Таким образом, в субстрат посредством зондов можно подавать электрический сигнал, обеспечивая возможность измерения электрических параметров. Альтернативные или дополнительные параметры, которые можно измерять, включают в себя температуру.
В предпочтительных вариантах осуществления, упомянутое по меньшей мере одно условие роста растений включает в себя содержание воды в пределах субстрата. Этот уровень предпочтительно выражают как процентный уровень содержания воды, требуемого для полного насыщения субстрата. В предпочтительных вариантах осуществления, упомянутый по меньшей мере один параметр представляет собой емкость. Это дает возможность вычислять содержание воды, поскольку содержание воды влияет на диэлектрические параметры субстрата и поэтому зависит от емкости.
В предпочтительных вариантах осуществления, упомянутое по меньшей мере одно условие роста растений включает в себя содержание питательных веществ. Содержание питательных веществ является отражением доли ионных солей в пределах субстрата. А если так, то в предпочтительных вариантах осуществления упомянутый по меньшей мере один параметр представляет собой электропроводность, поскольку она отражает долю ионных солей в субстрате.
Упомянутое по меньшей мере одно условие роста растений предпочтительно включает в себя и содержание воды, и содержание питательных веществ. Соответственно, можно измерять и емкость, и электропроводность. Должно быть ясно, что эти параметры можно получать, собирая урожай и исследуя комплексное полное сопротивление субстрата.
В предпочтительных вариантах осуществления, каждый массив содержит три зонда. В частности, два из этих зондов могут быть электродами для измерения таких электрических параметров, как электропроводность или емкость, а третий может быть датчиком температуры, предназначенным для измерения температуры субстрата.
Зонды предпочтительно имеют симметрию относительно оси вращения на дистальном конце. Например, зонды могут быть цилиндрами, усеченными с наклоном. Скашивая дистальный конец в целом цилиндрических зондов по наклонной плоскости, устанавливают относительно острый дистальный край, тем самым способствуя введению зондов в субстрат. Поэтому оказывается возможным относительно простое наложение устройства на субстрат. Более того, по сравнению с зондами, имеющими тупой конец, можно избежать образования пучка волокон в пределах субстратов. Это выгодно, поскольку образование пучка может влиять на измеряемые параметры субстрата.
Зонды предпочтительно имеют неодинаковую ориентацию относительно оси вращения. Если ориентации всех зондов относительно оси вращения выровнены, это может вызывать отклонение устройства от его желательного положения, когда оно вводится в субстрат. Предусматривая неодинаковую структуру ориентаций зондов, можно существенно ослабить упомянутый эффект. В предпочтительных вариантах осуществления, можно предусматривать пары зондов с противоположными ориентациями относительно оси вращения (т.е., имеющие ориентации, повернутые на 180 градусов), так что результирующее отклонение, обуславливаемое каждой парой, в сумме дает ноль.
В некоторых предпочтительных вариантах осуществления, ориентацию каждого зонда относительно оси вращения задают применительно к центральной точке, находящейся между зондами. Например, каждый зонд может иметь некоторую относительную ориентацию, связанную с радиусом, проведенным от упомянутой центральной точки к зонду. В конкретно предпочтительных вариантах осуществления, усеченная поверхность каждого зонда ориентирована по направлению центральной точке.
Устройство предпочтительно содержит также антенну для передачи сигналов на базовую станцию. Таким образом, выборку измерений и расчетных условий можно делать без фактического контроля устройства или без необходимости физического соединения. Это выгодно при упреждающих коммерческих настройках, в ходе которых приходится организовывать большие количества субстратов в пределах некоторой одиночной зоны.
В предпочтительных вариантах осуществления, устройство дополнительно содержит направляющий элемент, выполненный с возможностью взаимодействия с краем субстрата. Это может способствовать гарантии того, что направляющая находится в подходящем положении субстрата, обеспечивая более надежное сравнение измерений из различных устройств. Помимо этого, поскольку положение зондов в субстрате можно понимать не как положение именно друг относительно друга, а как положение в общем в пределах субстрата, можно наложить более точные ограничения на моделирование субстрата. Направляющий элемент предпочтительно выполнен с возможностью взаимодействия с нижним краем субстрата. В качестве альтернативы или дополнения, направляющий элемент может быть выполнен с возможностью взаимодействия с верхним краем субстрата. Соответственно можно понимать и относительные положения зондов - относительно нижнего и/или верхнего края субстрата.
Направляющий элемент может быть соединен с устройством с помощью регулируемого удерживающего средства. Это может обеспечить регулирование относительных положений направляющего элемента и зондов таким образом, что расстояние зондов от края субстрата можно надежно задавать и регулировать по потребности для различных размеров субстрата или для различных условий роста или требований измерения.
Регулируемое удерживающее средство может быть выполнено с возможностью удержания направляющего элемента во множестве выбираемых положений относительно зондов. Это может обеспечить выбор и задание одного из диапазона задаваемых расстояний направляющего элемента от зондов таким образом, что можно осуществлять воспроизводимые измерения при любом из некоторого количества задаваемых расстояний направляющего элемента от зондов.
Регулируемое удерживающее средство может содержать массив основных точек взаимодействия на одном из основного корпуса устройства и направляющего элемента и набор соответствующих точек взаимодействия направляющего элемента на другом из основного корпуса устройства и направляющего элемента для взаимодействия с поднабором массива основных точек взаимодействия. Это может обеспечить простую конструкцию одной части с единственным набором точек взаимодействия, а в другой части устройства можно предусмотреть более сложный массив из нескольких наборов точек взаимодействия. Это обеспечивает упрощенное изготовление одной части, такой, как направляющий элемент, и может ограничить более сложные признаки устройства единственным элементом - таким, как основной корпус устройства.
Устройство может дополнительно содержать по меньшей мере одну заглушку для взаимодействия с основными точками взаимодействия, с которыми не взаимодействуют точки взаимодействия направляющего элемента. Это может предотвратить засорение точек взаимодействия, которые не используются при установке направляющего элемента в определенном положении, водой или пылью или другими нежелательными веществами. Это может также предотвратить попадание нежелательных веществ в основной корпус устройства через отверстия, которые могут быть предусмотрены в качестве точек взаимодействия для направляющего элемента.
В соответствии со вторым аспектом изобретения, предложено устройство для обнаружения условий роста растений в пределах субстрата для роста растений, содержащее:
первый линейный массив из одного или более зондов для введения в субстрат;
второй линейный массив из одного или более зондов для введения в субстрат, причем второй линейный массив находится на фиксированном расстоянии от первого линейного массива; и
средство управления, выполненное с возможностью получения первого измерения по меньшей мере одного параметра субстрата на первом уровне субстрата из первого линейного массива зондов и второго измерения замера упомянутого по меньшей мере одного параметра субстрата на втором уровне субстрата из второго линейного массива зондов,
при этом с помощью первого и второго измерений можно вычислить по меньшей мере одно условие роста растений субстрата,
причем устройство дополнительно содержит направляющий элемент, выполненный с возможностью взаимодействия с краем субстрата, при этом направляющий элемент соединен с устройством с помощью регулируемых удерживающих средств, выполненных с возможностью удержания направляющего элемента во множестве выбираемых положений относительно зондов.
В соответствии с третьим аспектом изобретения, предложена система для выращивания растений, содержащая: субстрат для роста растений, содержащий плиту из искусственных стекловидных волокон (ИСВ); и устройство в соответствии с первым или вторым аспектом. Субстрат для роста растений может содержать дополнительные элементы, такие, как брикет из ИСВ, размещенный на плите, и пробку из ИСВ, размещенную в брикете. Система предпочтительно содержит один и только один брикет. Таким образом точно управлять условиями субстрата можно при выращивании растений в единственном брикете.
Зонды устройства предпочтительно проходят сквозь боковую стенку плиты. Первый и второй линейные массивы зондов предпочтительно отделены друг от друга в вертикальном направлении, и это означает, что несколько измерений (из которых можно вычислить условия роста растений) выполняются не только лишь по высоте плиты.
В соответствии с четвертым аспектом данного изобретения, предложен способ обнаружения условий роста растений в пределах субстрата для роста растений, содержащий этапы, на которых:
вводят зонды устройства обнаружения в субстрат, причем зонды расположены в первом линейном массиве и втором линейном массиве, при этом первый линейный массив и второй линейный массив находятся на фиксированном расстоянии друг от друга;
получают первое измерение по меньшей мере одного параметра субстрата на первом уровне субстрата из первого линейного массива зондов, и получают второе измерение упомянутого по меньшей мере одного параметра на первом уровне субстрата из второго линейного массива зондов;
объединяют первое и второе измерения, полученные на первом и втором уровнях субстрата; и
вычисляют по меньшей мере одно условие роста растений субстрата с помощью объединенных первого и второго измерений.
В соответствии с четвертым аспектом, выполняют несколько измерений на заданном расстоянии друг от друга, а потом объединяют эти измерения при вычислении условий роста растений. За счет проведения двух измерений (предпочтительно на разных высотах в субстрате), можно достичь улучшенного вычисления истинных условий роста растений, когда эти условия изменяются по всему субстрату.
Должно быть ясно, что в случае, если это уместно, предпочтительные признаки согласно первому аспекту можно применить ко второму, третьему или четвертому аспектам изобретения.
Краткое описание чертежей
Теперь, со ссылками на прилагаемые чертежи, будут описаны варианты осуществления данного изобретения, при этом:
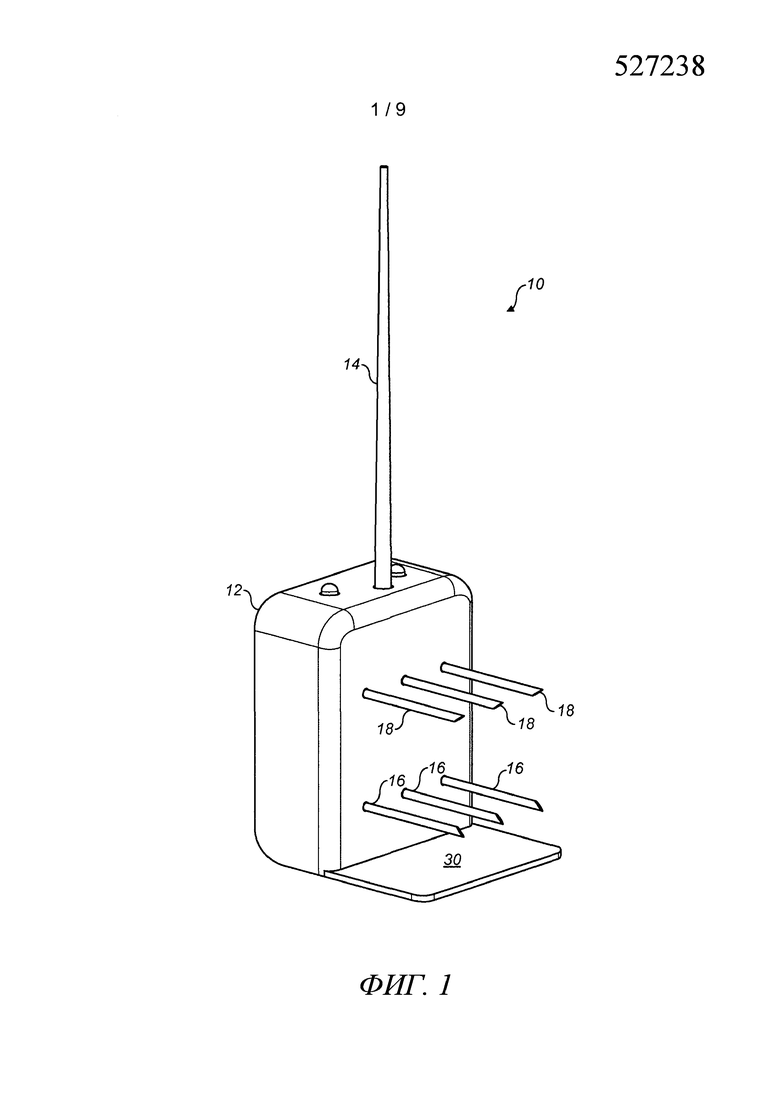
на фиг. 1 показано устройство для обнаружения условий роста растений в пределах субстрата для роста растений, в соответствии с предпочтительным вариантом осуществления данного изобретения;
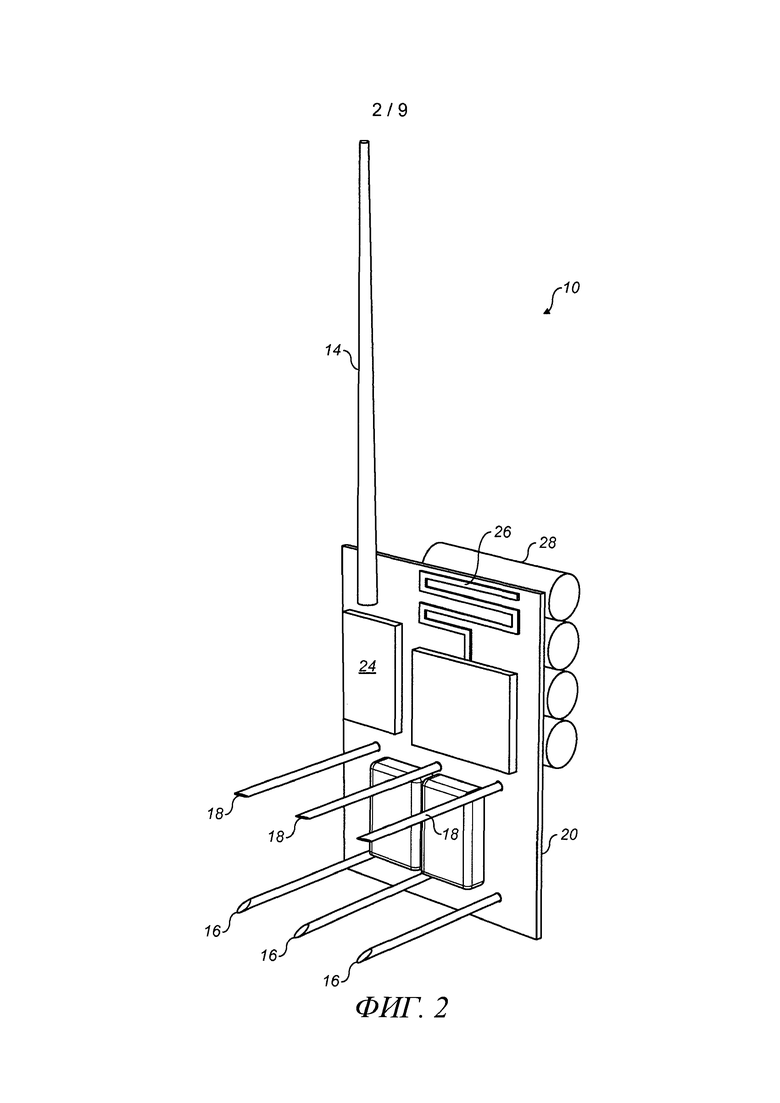
на фиг. 2 показан внутренний признак устройства согласно фиг. 1;
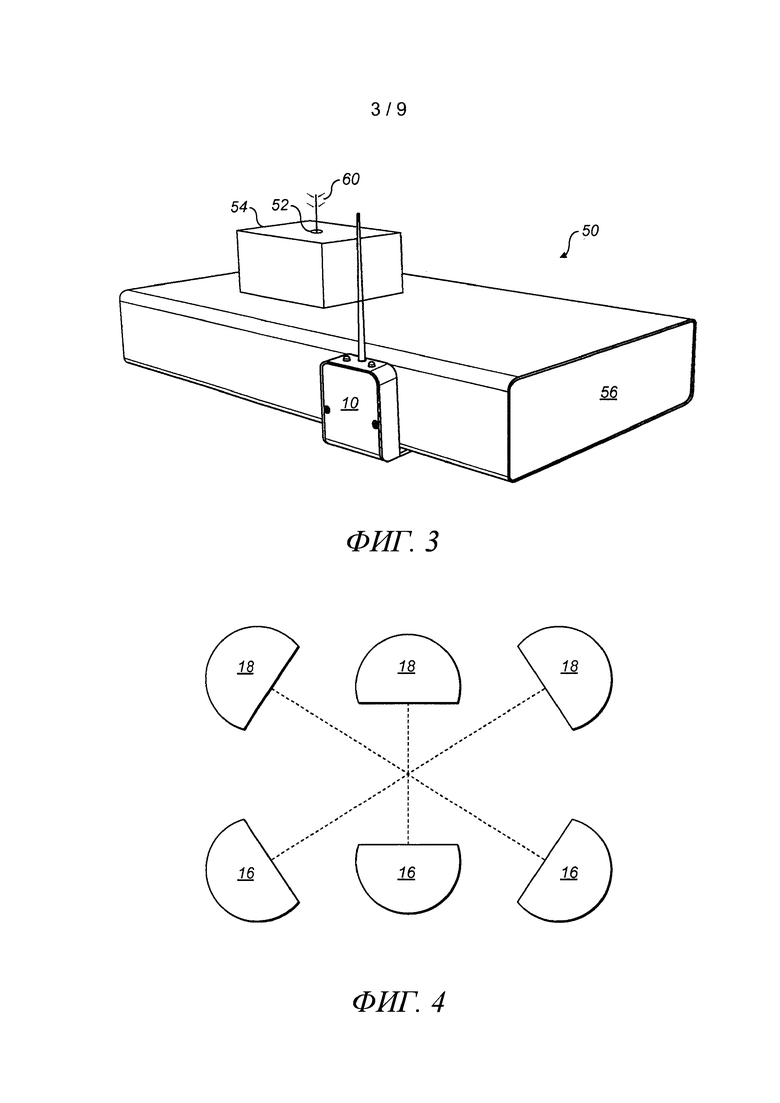
на фиг. 3 показана система для выращивания растений, содержащая устройство согласно фиг. 1 и субстрат для роста растений;
на фиг. 4 изображена ориентация относительно оси вращения зондов устройства согласно фиг. 1;
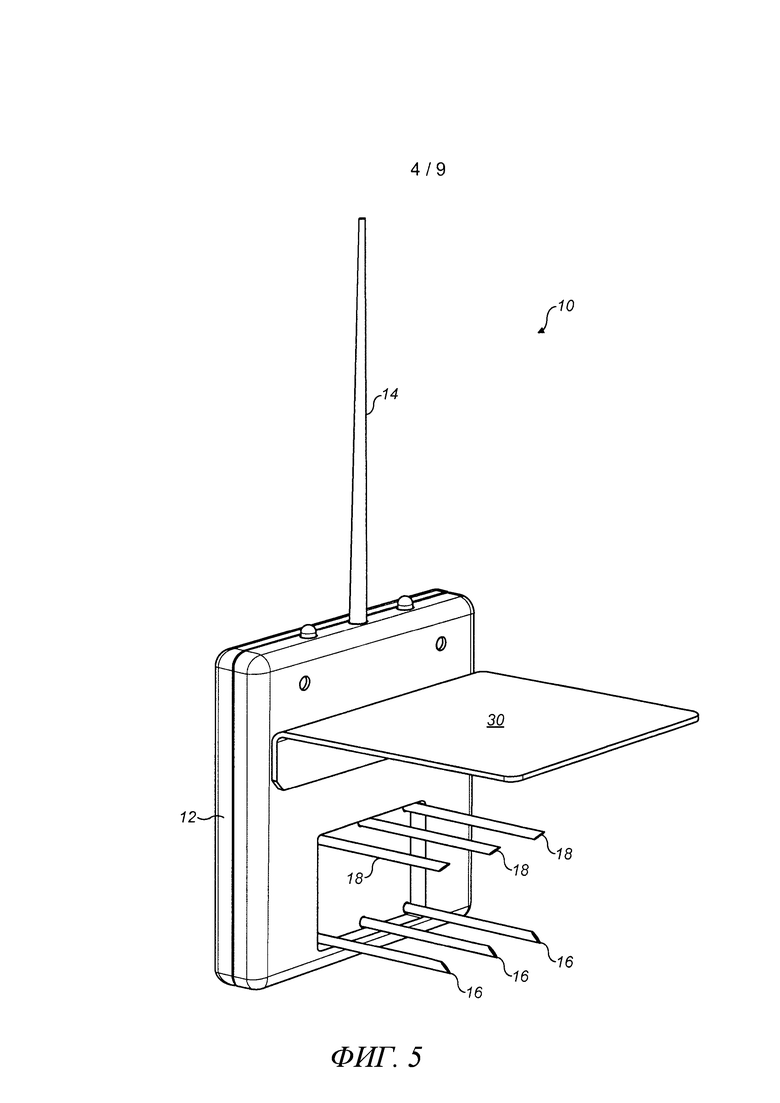
на фиг. 5 изображен альтернативный вариант осуществления данного изобретения; и
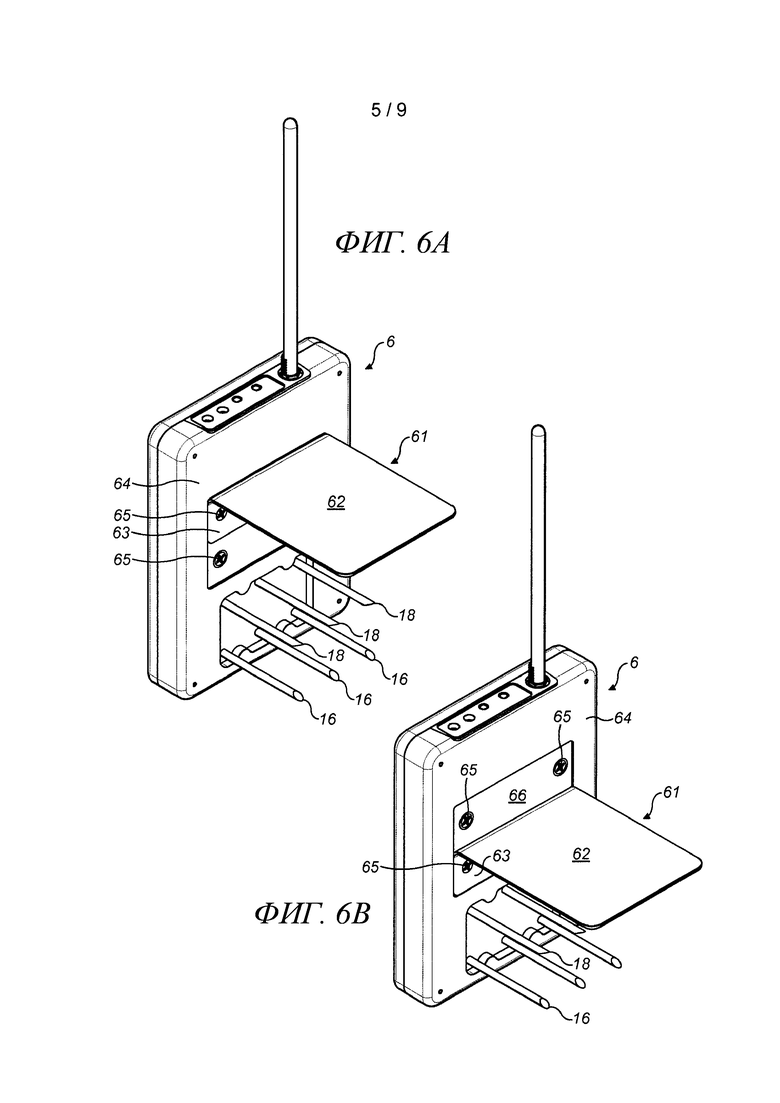
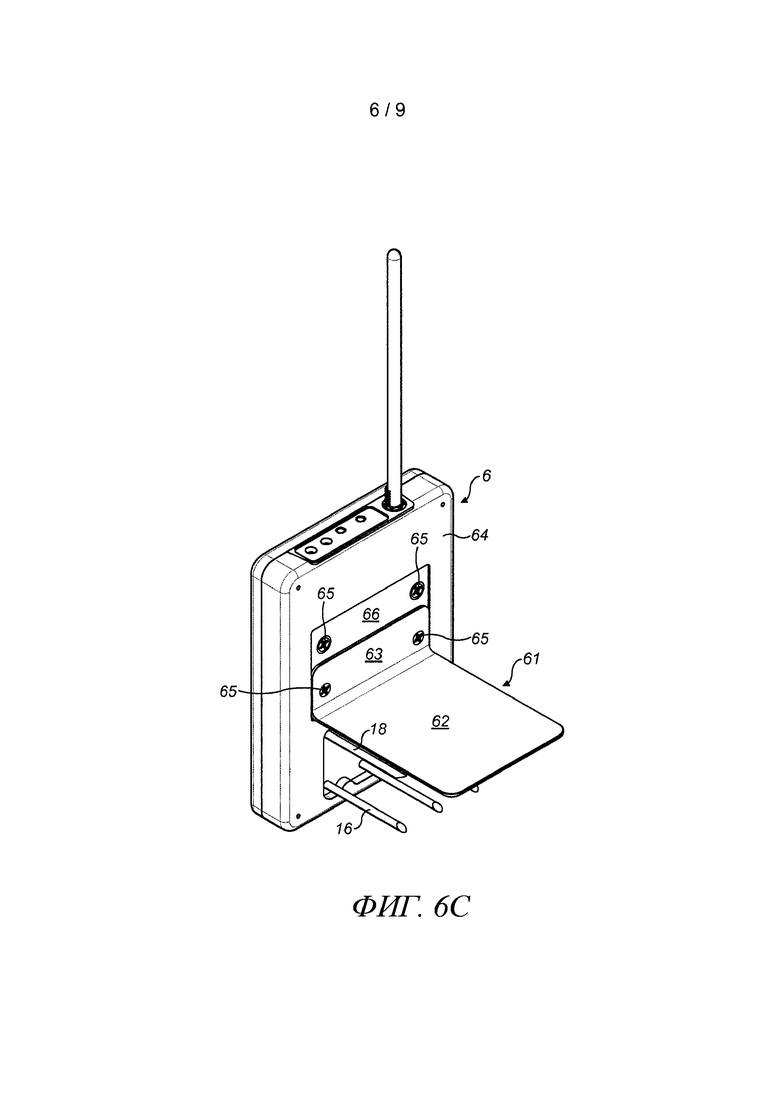
на фиг. 6A - 6C показана компоновка регулируемого направляющего элемента для данного изобретения.
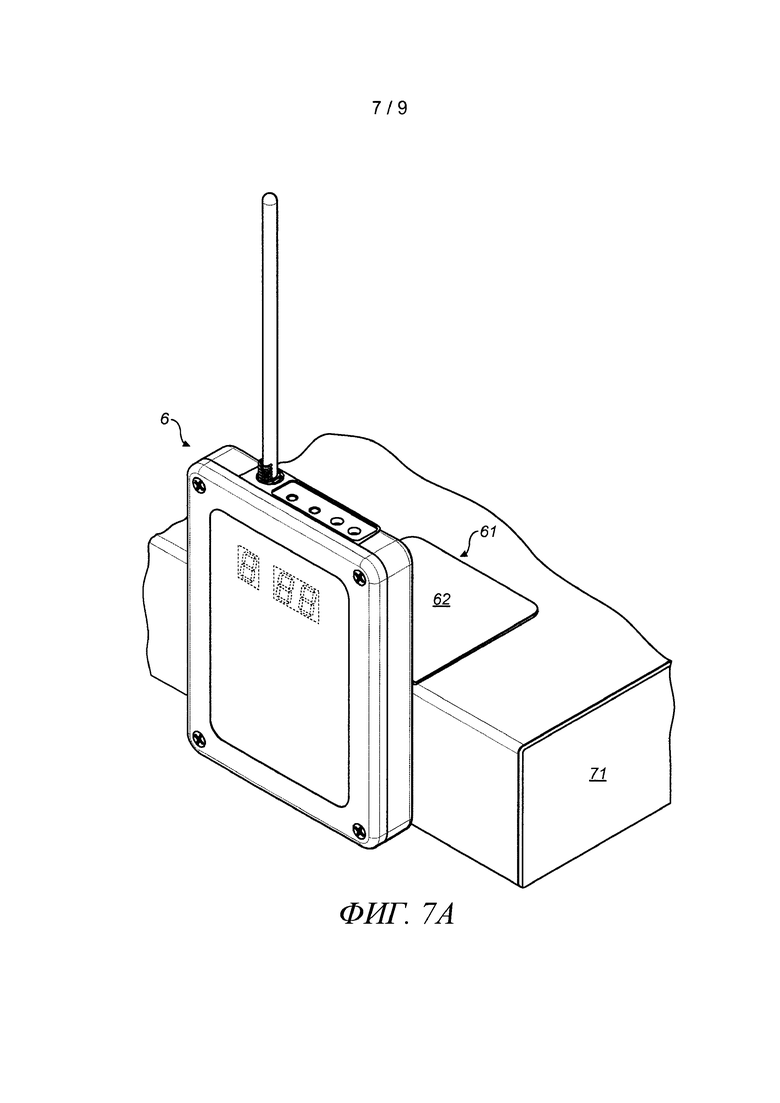
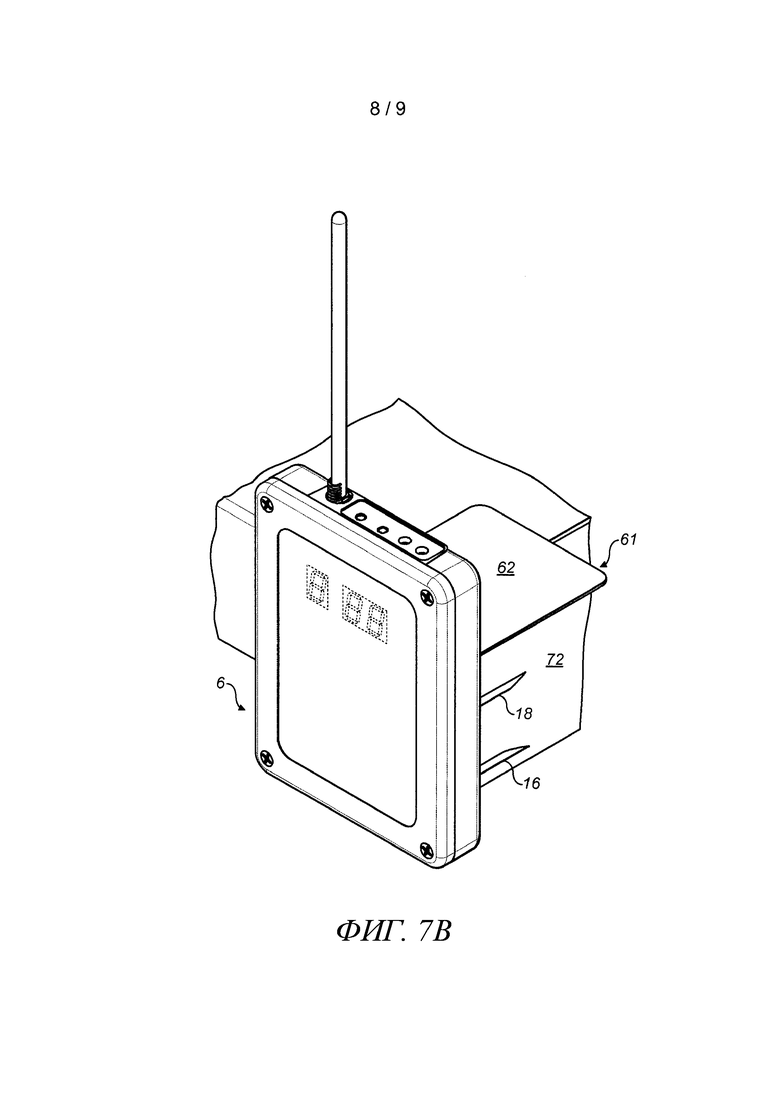
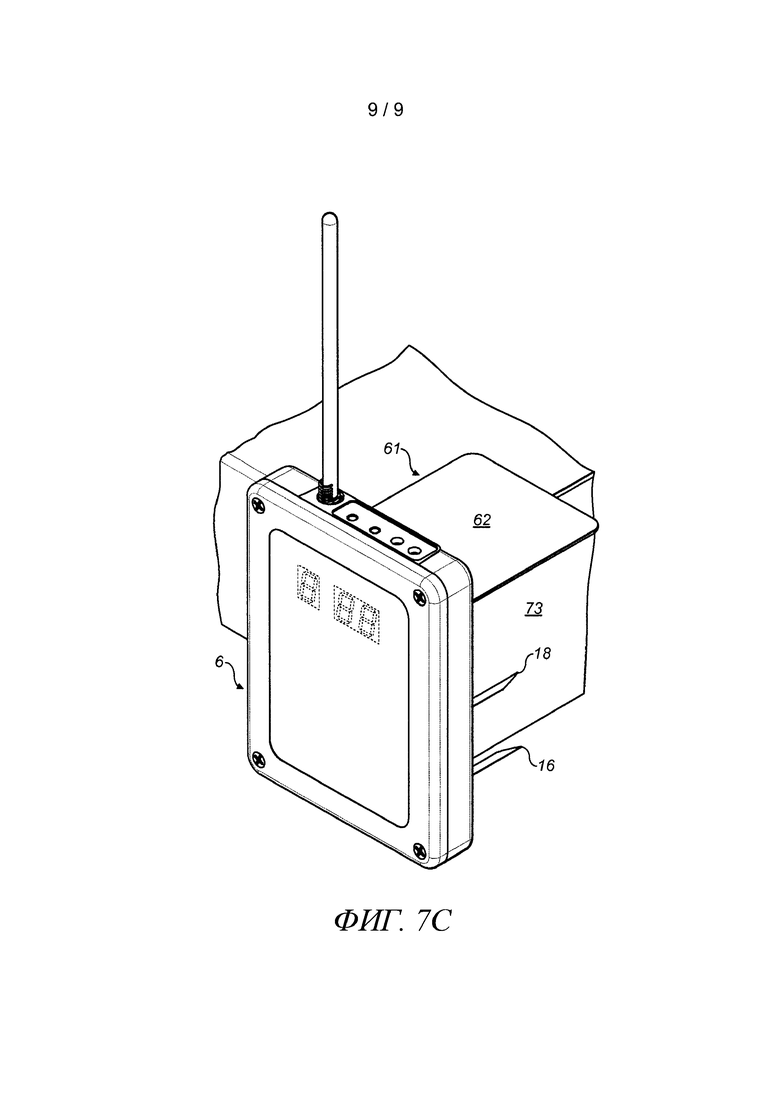
на фиг. 7A - 7C показано устройство, содержащее регулируемый направляющий элемент на субстрате для роста растений с различными высотами.
Осуществление изобретения
Обращаясь к фиг. 1, отметим, что здесь показан предпочтительный вариант осуществления устройства 10 для обнаружения условий роста растений. Устройство 10 содержит корпус 12, антенну 14, первый массив зондов 16 и второй массив зондов 18. Каждый массив зондов 16, 18 прикреплен к корпусу 12 устройства, и это означает, что само расстояние между массивами является фиксированным.
Устройство 10 может также содержать дополнительные признаки, не показанные на фиг. 1, такие, как визуальный индикатор (например, светоизлучающий прибор (светоизлучающий диод (СИД)) для индикации того, включено ли устройство 10, или пользовательский интерфейс, позволяющий пользователю управлять устройством 10. В одном простом примере, средство управления устройством может сводиться к переключателю включения-выключения.
В предпочтительном варианте осуществления, показанном на фиг. 1, каждый массив зондов 16, 18 состоит из трех отдельных зондов. В предпочтительных вариантах осуществления, два из них могут работать как электроды, а третий при этом работает как датчик температуры. Электроды можно использовать для зондирования электрических параметров субстрата, таких, как емкость или электропроводность субстрата. Зонды 16, 18 предпочтительно выполнены из нержавеющей стали.
Каждый массив зондов 16, 18 является линейным массивом, причем зонды в этом массиве разделены интервалами по 25 мм. При обычной работе линейный массив проходит в горизонтальном направлении. Линейные массивы отделены друг от друга посредством простого переноса по вертикали, так что при обычном использовании эквивалентные зонды каждого массива находятся непосредственно друг над другом и друг под другом.
Первый массив 16 предпочтительно находится на расстоянии примерно 25 мм от низа устройства 10, а второй массив 18 находится в положении примерно 60 мм от низа устройства 10. Соответственно, в предпочтительном варианте осуществления, второй массив 18 находится примерно в 35 мм над первым массивом 16. Обнаружено, что этот вертикальный промежуток оказывается подходящим для измерения условий роста растений в того типа субстратах для роста растений, которые предусматриваются для использования с устройством 10. Вместе с тем, специалист поймет, что для субстратов для роста растений, относящихся к отличающемуся типоразмеру, упомянутые размеры можно изменять.
На фиг. 2 показано устройство 10 без корпуса 12, вследствие чего раскрыты внутренние признаки устройства 10. Как можно увидеть на фиг. 2, устройство содержит печатную плату, на которую установлены зонды 16, 18. Помимо этого, устройство содержит блок 22 управления, также установленный на печатную плату 20. Блок 22 управления подключен к зондам 16, 18 посредством печатной платы и выполнен с возможностью получения от зондов нескольких измерений параметров субстрата для роста растений. Блок 22 управления может быть выполнен с возможностью подачи электрического сигнала в один или более зондов 16, 18, чтобы получать такие измерения.
Устройство 10 дополнительно содержит радиомодуль 24 для управления антенной 14. Антенну 14 можно использовать для передачи измерений и/или расчетных условий роста растений на базовую станцию. Это позволяет собирать такую информацию из некоторого количества аналогичных устройств, чтобы поддерживать управление в большой системе, где предусмотрено множество субстратов для роста растений. Радиомодуль 24 и антенна 14 могут быть соединены посредством короткого высокочастотного кабеля. В предпочтительных вариантах осуществления, антенна 14 передает на частоте 868 МГц и имеет высоту приблизительно 150 мм. Как показано, антенна 14 согласно предпочтительному варианту осуществления выполнена в прямолинейной, не сочленяемой конфигурации. Специалист поймет, что, если это уместно, то можно выбрать альтернативные конструкции антенны и частоты ее работы.
Действительно, в предпочтительном варианте осуществления также показана альтернативная радиосистема 26. Альтернативная радиосистема 26 может, например, передавать на частоте, отличающейся от той, на которой работают антенна 14 и радиомодуль 24. Может оказаться уместным наличие более одного варианта выбора в единственном устройстве 10 для работы в соответствии с изменяющимися местными нормами, касающимися электромагнитной связи. Например, антенна 14 может быть приспособлена к требованиям, действующим в пределах Евросоюза, а альтернативная радиосистема 26 может быть предназначена для использования в Соединенных Штатах Америки.
Устройство 10 дополнительно содержит монтажную стойку для батареек 28. В предпочтительном варианте осуществления, для электропитания устройства используются 4 батарейки типоразмера AA.
Возвращаясь к фиг. 1, можно также заметить, что устройство 10 содержит направляющий элемент 30. Направляющий элемент 30 выполнен с возможностью взаимодействия с нижним краем субстрата для роста растений. Это имеет эффект гарантии нахождения массивов зондов 16, 18 на заданном расстоянии от нижнего края. Таким образом, положением зондов 16, 18 можно управлять. Направляющий элемент 30 согласно предпочтительному варианту осуществления содержит, по существу, планарный выступ, который можно вводить под субстрат для роста растений. Если это уместно, то можно использовать и альтернативные конфигурации.
Как упоминалось выше, устройство 10, необходимое для роста растений, при использовании взаимодействует с субстратом для роста растений. Система для выращивания растений, содержащая устройство 10 и подходящий субстрат 50, показана на фиг. 3.
В системе согласно фиг. 3, субстрат 50 для роста растений содержит три элемента: пробку 52, брикет 54 и плиту 56. Пробка 52 расположена в пределах брикета 54, который размещен на верхней поверхности плиты 56. На фиг. 3 также показано растение 60, растущее из субстрата 50.
Пробка 52 и брикет 54 используются для развития растения 60 на раннем этапе из семени. В течение последующей фазы роста пробка 52, брикет 54 и растение 60 размещены на плите 56. Систему согласно фиг. 3 используют для измерения параметров субстрата 50, в частности плиты 56, во время этого этапа последующего роста. Вместе с тем, должно быть ясно, что изобретение также может найти применение и во время фазы раннего развития.
Зонды 16, 18 устройства 10 вводятся в плиту 56 для взаимодействия устройства 10 с субстратом 50 для роста растений. Направляющий элемент 30 упирается в нижнюю поверхность плиты 56, гарантируя, что высоты зондов 16, 18 надежно ограничены.
Пробка 52, брикет 54 и плита 56 - все они предпочтительно выполнены из искусственных стекловидных волокон (ИСВ). Предпочтительными ИСВ могут быть стекловолокно, минеральная вата или огнеупорные керамические волокна. В предпочтительном варианте осуществления, ИСВ представляют собой минеральную вату, в частности каменную вату. Пробка 52, брикет 54 и плита 56, как правило, содержат связующее и/или смачивающий агент. Вообще говоря, связующее предпочтительно содержится в гидрофильной связующей системе, которая может содержать связующее и смачивающий агент, или может содержать только связующее. Гарантируя, что связующая система гидрофильна, можно улучшить присущие плите параметры удержания воды по отношению к связующим системам, которые являются не гидрофильными или гидрофобными. Данное изобретение также можно использовать с субстратами, не содержащими ИСВ.
В варианте осуществления, показанном на фиг. 3, высота плиты составляет 75 мм. В еще одном предпочтительном варианте осуществления, высота плиты 56 составляет 100 мм. Специалист поймет, что можно использовать альтернативные типоразмеры плиты, если это уместно. Плита 56 предпочтительно состоит из нескольких горизонтальных слоев ИСВ с отличающимися плотностями. В частности, слой ИСВ более высокой плотности может располагаться над слоем ИСВ более низкой плотности. Глубины слоев и зондов 16, 18 устройства предусмотрены такими, что первый массив зондов 16 и второй массив зондов 18 расположены в разных слоях плиты 56.
Устройство 10 связано с субстратом 50 посредством введения зондов 16, 18 в боковую стенку плиты 56. Зонды 16, 18 имеют по существу цилиндрическую форму, но скошены на дистальном конце. Таким образом, зонды 16, 18 представляют собой усеченные с наклоном цилиндры. Усечение цилиндров с наклоном способствует введению зондов 16, 18 в плиту 56, поскольку оно обеспечивает острый дистальный край, который может резать волокна в пределах плиты 56, а не просто образовывать пучок из них.
В результате усечения с наклоном участков дистальных концов зондов 16, 18, зонды 16, 18 становятся асимметричными относительно оси вращения. Эта асимметрия относительно оси вращения означает, что по мере поперечного введения зонда в плиту 56, может проявиться боковая смещающая сила. В предпочтительном варианте осуществления изобретения, зонды 16, 18 принудительно расположены с разными ориентациями относительно оси вращения. Это способствует предотвращению возможности сложения боковых смещающих сил, обуславливаемого конструкцией и вызывающего нарушение ориентации устройства 10, когда его вводят в плиту 56.
Вышеупомянутый признак предпочтительного варианта осуществления иллюстрируется на фиг. 4, где показаны поперечные сечения зондов 16, 18 в области около дистальных концов, в которой цилиндрический профиль асимметрично нарушен наклонной плоскостью усечения зондов 16, 18. В предпочтительном варианте осуществления, пары зондов 16, 18 располагаются с противоположными ориентациями относительно оси вращения (т.е., повернуты друг относительно друга на 180 градусов). Кроме того, каждая пара зондов содержит один зонд из первого массива 16 и один зонд из второго массива 18. На фиг. 4 показано, что первая пара зондов содержит верхний левый и нижний правый зонды, вторая пара зондов содержит верхний правый и нижний левый зонды, а третья пара содержит верхний средний и нижний средний зонды. Соединения пар зондов изображены пунктирными линиями. Пунктирные линии также помогают проиллюстрировать то, как в этом варианте осуществления выбирают ориентацию каждого зонда относительно оси вращения применительно к центральной точке (в пересечении пунктирных линий). Конкретно, усеченная поверхность каждого зонда в этом варианте осуществления ориентирована по направлению к центральной точке. Когда устройство 10 вводят в плиту 56, боковая сила, создаваемая одним зондом из пары, противодействует боковой силе, прикладываемой вторым зондом в этой паре, приводя к суммарному нулевому воздействию.
При использовании, устройство 10 взаимодействует с субстратом 50 для роста растений, как показано на фиг. 3. Субстрат 50 для роста растений используют для подпитки растения 60 водой и/или питательными веществами за счет обеспечения ирригационного устройства (не показано), которое осуществляет капельную подачу воды и/или питательных веществ в брикет 54 и/или плиту 56. Чтобы управлять действиями ирригационного устройства с целью гарантирования идеальных условий роста растений, желательно измерять эти условия в плите 56.
Устройство 10 выполняет различные измерения параметров плиты от каждого массива зондов 16, 18. Эти параметры могут включать в себя температуру и/или электрические параметры, такие, как электропроводность и емкость. Температура сама является условием роста растений, а электропроводность и емкость можно использовать для вывода дополнительных условий роста растений, таких, как уровень питательных веществ (измеряемый по доле ионных солей) и содержание воды, соответственно.
Измерения из зондов 16, 18 отражают локальные условия для этих зондов. Чтобы оценить истинные общие условия в пределах плиты, два измерения от каждого зонда объединяют для вычисления общих условий роста растений. Относительный вес, придаваемый каждому измерению, и метод, которым их объединяют, можно выбрать надлежащим образом. Например, смоделировать условия в пределах плиты в зависимости от двух измерений можно с помощью теоретических, эмпирических или полуэмпирических методов. Точность, с которой можно выполнять несколько измерений, значительно выше, чем возможная посредством одного измерения.
Данное изобретение может принимать формы, отличающиеся от показанной в предпочтительном варианте осуществления. Например, направляющий элемент 30 в альтернативном или дополнительном варианте может быть выполнен с возможностью ориентации устройства 10 от верхнего края плиты 56, а не нижнего края, как показано на чертежах, рассмотренных выше. Например, альтернативный вариант осуществления, показанный на фиг. 5, содержит направляющий элемент 30, который пригоден для взаимодействия с верхним краем плиты 56. Вариант осуществления, показанный на фиг. 5, идентичен описанному применительно к ранее рассмотренным чертежам, за исключением позиционирования направляющего элемента 30. Направляющий элемент 30 позиционирован над зондами 16, 18 и поэтому при использовании может взаимодействовать с верхней поверхностью плиты 56.
Одно преимущество направляющего элемента, который соотносится с нижним краем плиты, состоит в том, что такое соотнесение, как обнаружилось, обеспечивает повышенную доступность для устройства в диапазоне высот плит 56. Все же, направляющий элемент, выполненный с возможностью соотнесения с верхним краем плиты, может уменьшить помехи в расположении на плите. В некоторых вариантах осуществления, направляющий элемент 30 может быть регулируемым для позиционирования в случае плит 56 разных высот, в частности, когда направляющий элемент надлежит использовать в связи с верхним краем плиты 56. Разные высоты плит можно использовать для различных культур, а в определенных компоновках можно размещать плиты в лотках с приподнятым желобом, что делает задание расстояния от низа плиты непрактичным. Поэтому может оказаться выгодным задание некоторого количества расстояний направляющего элемента от зондов устройства согласно изобретению.
Пример такой компоновки показан на фиг. 6A-6C. Компоновка содержит направляющий элемент в форме направляющей пластины 61, накладываемой на устройство 6 согласно данному изобретению. Направляющая пластина 61 показана в первой ориентации на фиг. 6A, где направляющая пластина находится в наивысшей ориентации относительно зондов 16 и 18. Направляющая пластина содержит направляющую секцию 62 и крепежную секцию 63. Крепежную секцию можно накладывать на основной корпус 64 устройства во множестве выбираемых точек 65 взаимодействия, показанных на рассматриваемом чертеже как набор винтов, введенных в поднабор массива отверстий, предусмотренных в основном корпусе 64. Путем наложения направляющей пластины 61 на уровне верхнего набора отверстий, как показано на фиг. 6A, можно поддерживать первое, большее расстояние между направляющей пластиной 62 и зондами 16, 18. Поддерживая ориентацию направляющей пластины и перемещая ее к нижнему поднабору отверстий 65 для винтов, можно удерживать направляющую пластину в некотором промежуточном положении относительно зондов 16, 18. Это расположение изображено на фиг. 6B. Можно использовать и дополнительную ориентацию, как изображено на фиг. 6C, где ориентация направляющего элемента предусматривает свисание, в этом случае - за счет поворота на 180 градусов вокруг оси, параллельной зондам 16, 18. Изменяя ориентацию и используя набор отверстий, ближайших к зондам, можно достичь дополнительного, меньшего расстояния между зондами и направляющим элементом. Должно быть ясно, что - в зависимости от ориентации основного корпуса 64, направляющего элемента или отверстий 65 относительно зондов 16, 18 - можно регулировать направляющую пластину 61, ограничивая диапазон выбираемых и задаваемых расстояний от зондов. В зависимости от размещения направляющей пластины 61 над или под зондами, можно надежно и воспроизводимо задавать расстояние зондов от верхней или нижней или боковой или любой поверхности субстрата. Это может способствовать более воспроизводимым измерениям условий субстрата, поступающим от зондов. Может оказаться выгодным поддержание зондов в середине высоты плиты о которой идет речь, или центрирование их вокруг этой середины. В качестве конкретных примеров, отметим, что ориентацию согласно фиг. 6A можно использовать, когда высота плиты составляет 10 см. Расположение согласно фиг. 6B можно использовать, когда высота плиты составляет 7,5 см. Ориентацию согласно фиг. 6C может использовать в случае плит высотой 7,5 см, когда нижние 2 см плиты покрывает желоб, изменяющий предполагаемую среднюю точку высоты плиты.
Для закрытия набора отверстий 65, не занятых крепежной секцией 63, можно использовать заглушку или заглушки. Их можно предусмотреть в форме пластины, накрывающей всю зону 66 вокруг отверстий 65, которые не заняты крепежной секцией 63. Заглушку и направляющую пластину 61 можно держать на устройстве 6 всегда во время использования, и это означает, что нужные пользователю детали при каждой конфигурации всегда у него под рукой, а риск потери деталей во время использования снижается. Заглушка или заглушки также могут способствовать поддержанию корпуса 64 устройства 6 герметизированным, так что вода или загрязнение иного рода, либо нежелательные вещества, не попадут в корпус 64 устройства 6. Если заглушку используют по всей зоне 66 вокруг неиспользуемых отверстий устройства, это также может способствовать упрочнению корпуса 64 устройства 66. Должно быть ясно, что направляющий элемент можно использовать вместе с другими признаками описываемого здесь устройства, или отдельно от них, поддерживая зонды устройства для обнаружения условий роста растений на заданном расстоянии от края субстрата. Такая компоновка обеспечивает множество конфигураций из одного набора компонентов, а также сокращает производственные затраты и упрощает сборку и использование по сравнению с системой, в которой используются несколько наборов направляющих элементов при различающихся требованиях к расстоянию направляющего элемента от зондов.
Изменения и модификации, которые можно внести в вышеописанные варианты осуществления, будут очевидны для специалиста. Такие изменения и модификации могут повлечь за собой эквивалентные или другие признаки, которые уже известны и которые можно использовать вместо описанных здесь признаков или в дополнение к ним. Признаки, которые описаны в контексте отдельных вариантов осуществления, можно предусмотреть в комбинации с одиночным вариантом осуществления. И наоборот, признаки, которые описаны в контексте одиночного варианта осуществления, можно также предусмотреть отдельно или в любой подходящей субкомбинации.
Следует отметить, что термин «содержащий (-ая, -ое, -ие)» не исключает другие элементы или этапы, признак единственного числа не исключает множества, один признак может выполнять функции нескольких признаков, приводимых в формуле изобретения, а условные обозначения в формуле изобретения не следует толковать как ограничивающие объем притязаний формулы изобретения. Следует также отметить, что чертежи не обязательно выполнены в масштабе; вместо этого, основное внимание уделено иллюстрации принципов данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВКИ РОСТА РАСТЕНИЙ | 2017 |
|
RU2735555C2 |
| СИСТЕМА ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ | 2014 |
|
RU2649855C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫРАЩИВАНИЕМ РАСТЕНИЙ | 2019 |
|
RU2776122C1 |
| СИСТЕМА ВЫРАЩИВАНИЯ РАСТЕНИЙ | 2014 |
|
RU2632980C2 |
| РОСТОВОЙ СУБСТРАТ | 2015 |
|
RU2673714C2 |
| СПОСОБЫ УВЕЛИЧЕНИЯ УРОЖАЯ И СТРЕССОУСТОЙЧИВОСТИ У РАСТЕНИЯ | 2012 |
|
RU2632569C2 |
| ТРЕХМЕРНЫЕ ПОЛИМЕРНЫЕ СЕТКИ И ИХ ПРИМЕНЕНИЕ | 2018 |
|
RU2780656C2 |
| КОНСТРУКЦИИ СУБСТРАТОВ ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ НА ОСНОВЕ МХА SPHAGNUM И СПОСОБ ИХ ПОЛУЧЕНИЯ | 2014 |
|
RU2656551C2 |
| ТРЕХМЕРНЫЕ ПОЛИМЕРНЫЕ СЕТКИ С РАСПОЛОЖЕННЫМИ В НИХ КАНАЛАМИ | 2016 |
|
RU2752926C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ТЕПЛИЦЫ | 2007 |
|
RU2448455C2 |
Группа изобретений относится к области растениеводства и может быть использована при определении условий роста растений для субстрата. Устройство обнаружения условий роста растений для субстрата содержит первый линейный массив зондов, второй линейный массив зондов и блок управления. Второй массив зондов находится на фиксированном расстоянии от первого массива зондов. Блок управления выполнен с возможностью объединения полученных от первого и второго массивов зондов измерений. При осуществлении способа обнаружения условий роста растений вводят зонды в субстрат. Получают измерение параметров от первого и второго массивов зондов. Объединяют первое и второе измерения. Вычисляют условие роста растений на основании объединенных измерений. Обеспечивается улучшение оценки общих условий роста растений для субстрата. 4 н. и 19 з.п. ф-лы, 11 ил.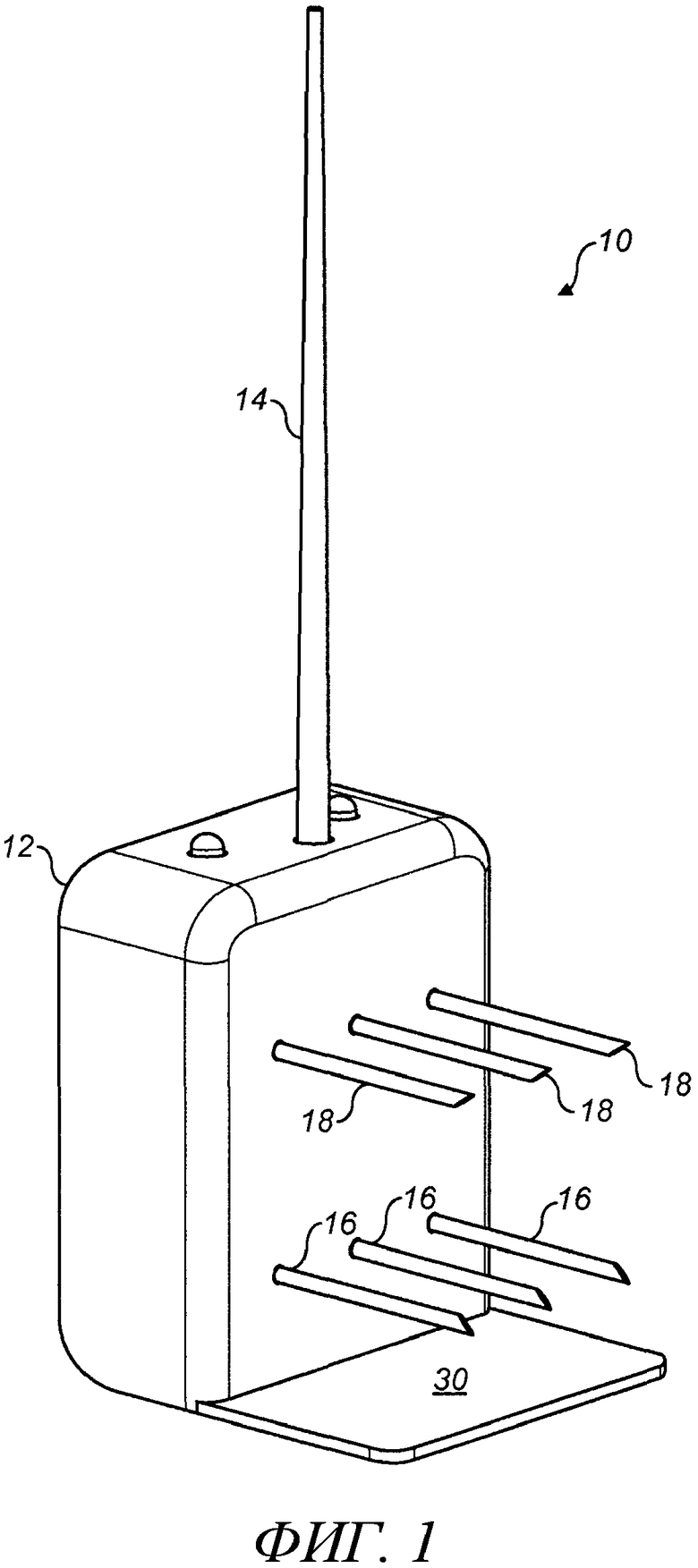
1. Устройство для обнаружения условий роста растений в субстрате для роста растений, содержащее:
первый линейный массив из одного или более зондов для введения в субстрат;
второй линейный массив из одного или более зондов для введения в субстрат, причем второй линейный массив находится на фиксированном расстоянии от первого линейного массива; и
блок управления, выполненный с возможностью получения первого измерения по меньшей мере одного параметра субстрата на первом уровне субстрата из первого линейного массива зондов и второго измерения упомянутого по меньшей мере одного параметра субстрата на втором уровне субстрата из второго линейного массива зондов,
при этом блок управления дополнительно выполнен с возможностью объединения первого и второго измерений, полученных на первом и втором уровнях субстрата, для вычисления по меньшей мере одного условия роста растений для субстрата в зависимости от первого и второго измерений.
2. Устройство по п. 1, в котором упомянутое по меньшей мере одно условие роста растений включает в себя содержание воды.
3. Устройство по п. 2, в котором по меньшей мере один электрический параметр представляет собой емкость.
4. Устройство по п. 1, в котором упомянутое по меньшей мере одно условие роста растений включает в себя содержание питательных веществ.
5. Устройство по п. 4, в котором по меньшей мере один электрический параметр представляет собой электропроводность.
6. Устройство по п. 1, в котором каждый линейный массив содержит три зонда.
7. Устройство по п. 1, в котором зонды на дистальном конце асимметричны относительно оси вращения.
8. Устройство по п. 7, в котором зонды являются цилиндрами, усеченными под наклоном.
9. Устройство по п. 7 или 8, в котором зонды имеют неодинаковую ориентацию относительно оси вращения.
10. Устройство по п. 1, дополнительно содержащее антенну для передачи сигналов в базовую станцию.
11. Устройство по п. 1, дополнительно содержащее направляющий элемент, выполненный с возможностью взаимодействия с краем субстрата.
12. Устройство по п. 11, в котором направляющий элемент выполнен с возможностью взаимодействия с нижним и/или верхним краем субстрата.
13. Устройство по п. 11 или 12, в котором направляющий элемент соединен с устройством с помощью регулируемого удерживающего средства.
14. Устройство по п. 13, в котором регулируемое удерживающее средство выполнено с возможностью удержания направляющего элемента во множестве выбираемых положений относительно зондов.
15. Устройство по п. 14, в котором регулируемое удерживающее средство выполнено с возможностью удержания направляющего элемента во множестве выбираемых положений относительно зондов за счет использования различных выбираемых ориентаций направляющего элемента.
16. Устройство по п. 15, в котором регулируемое удерживающее средство содержит массив первых точек взаимодействия на одном из основного корпуса устройства и направляющего элемента и набор соответствующих вторых точек взаимодействия направляющего элемента на другом из основного корпуса и направляющего элемента для взаимодействия с поднаборами массива первых точек взаимодействия.
17. Устройство по п. 16, в котором регулируемое удерживающее средство содержит массив основных точек взаимодействия на основном корпусе устройства и набор соответствующих точек взаимодействия направляющего элемента, имеющихся на направляющем элементе, для взаимодействия с поднаборами массива основных точек сцепления.
18. Устройство по п. 17, дополнительно содержащее по меньшей мере одну заглушку для взаимодействия по меньшей мере с одной первой точкой взаимодействия, с которой не взаимодействуют вторые точки взаимодействия.
19. Устройство для обнаружения условий роста растений в субстрате для роста растений, содержащее:
первый линейный массив из одного или более зондов для введения в субстрат;
второй линейный массив из одного или более зондов для введения в субстрат, причем второй линейный массив находится на фиксированном расстоянии от первого линейного массива; и
блок управления, выполненный с возможностью получения первого измерения по меньшей мере одного параметра субстрата из первого линейного массива зондов и второго измерения упомянутого по меньшей мере одного параметра субстрата из второго линейного массива зондов,
при этом с использованием первого и второго измерений можно вычислить по меньшей мере одно условие роста растений для субстрата,
причем устройство дополнительно содержит направляющий элемент, выполненный с возможностью взаимодействия с краем субстрата, при этом направляющий элемент соединен с устройством с помощью регулируемого удерживающего средства, выполненного с возможностью удержания направляющего элемента во множестве выбираемых положений относительно зондов.
20. Система для выращивания растений, содержащая:
субстрат для роста растений, содержащий плиту;
устройство по любому из пп. 1-19.
21. Система для выращивания растений по п. 20, в которой плита является плитой из искусственных стекловидных волокон - ИСВ.
22. Система для выращивания растений по п. 20 или 21, в которой зонды устройства проходят сквозь боковую стенку плиты.
23. Способ обнаружения условий роста растений в субстрате для роста растений, содержащий этапы, на которых:
вводят зонды устройства обнаружения в субстрат, причем зонды расположены в первом линейном массиве и втором линейном массиве, при этом первый линейный массив и второй линейный массив находятся на фиксированном расстоянии друг от друга;
получают первое измерение по меньшей мере одного параметра субстрата на первом уровне субстрата из первого линейного массива зондов и получают второе измерение упомянутого по меньшей мере одного параметра на первом уровне субстрата из второго линейного массива зондов;
объединяют первое и второе измерения, полученные на первом и втором уровнях субстрата; и
вычисляют по меньшей мере одно условие роста растений для субстрата с использованием объединенных первого и второго измерений.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Измеритель влажности почвы | 1985 |
|
SU1336997A1 |
| 0 |
|
SU392639A1 |

