ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Данное раскрытие сущности относится к устройству управления рулением и к способу управления рулением.
УРОВЕНЬ ТЕХНИКИ
[0002] PTL 1 описывает руление по проводам, при котором колеса поворачиваются посредством одного электромотора для руления. Когда неисправен электромотор для руления, соединяется резервная муфта, чтобы механически соединять систему рулевого управления.
При повороте посредством одного электромотора таким способом, размер электромотора увеличен для того, чтобы получать достаточную мощность, и в силу этого уменьшается степень свободы его расположения. Следовательно, обсуждается возможность поворачивать колеса посредством двух меньших по размеру электромоторов.
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP 2002-225733 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] Конфигурация, в которой два электромотора поворачивают колеса, позволяет подавлять увеличение размера электромотора и имеет превосходные характеристики расположения. Тем не менее, имеются варианты для изучения отказоустойчивого режима. Например, резервная муфта может быть соединена, когда неисправен любой из электромоторов. Тем не менее, это приводит к неработоспособности другого электромотора, который не является неисправным. Таким образом, не полностью используется преимущество предоставления двух электромоторов.
Одна цель варианта осуществления настоящего изобретения заключается в том, чтобы осуществлять отказоустойчивый режим, допускающий полное использование преимущества предоставления нескольких электромоторов.
Решение задачи
[0005] Согласно аспекту настоящего раскрытия сущности, предусмотрено устройство управления рулением, включающее в себя муфту, предоставленную между входным рулевым механизмом и выходным поворотным механизмом, первый электромотор и второй электромотор, сконфигурированные с возможностью предоставлять движущую силу, предоставленную в выходном поворотном механизме, и модуль определения крутящего момента, предоставленный для выходного вала. Затем управление поворотом с использованием двух электромоторов задается как осуществление управления углом поворота колеса посредством управления углом вращения первого электромотора посредством первого модуля управления и посредством управления углом вращения второго электромотора посредством второго модуля управления, в зависимости от угла поворота входного вала в состоянии, в котором муфта разъединена. Кроме того, управление поворотом с использованием одного электромотора задается как осуществление управления углом поворота колеса посредством управления углом вращения второго электромотора посредством второго модуля управления, в зависимости от угла поворота входного вала в состоянии, в котором муфта разъединена, и первый модуль управления не управляет приведением в действие первого электромотора. Кроме того, управление усилением с использованием одного электромотора задается как осуществление управления усиливающим крутящим моментом для операции руления водителем посредством управления крутящим моментом первого электромотора посредством первого модуля управления в зависимости от крутящего момента, определенного посредством модуля определения крутящего момента в состоянии, в котором муфта соединена, и второй модуль управления не управляет приведением в действие второго электромотора. Затем второй модуль управления выполнен с возможностью осуществлять управление поворотом с использованием одного электромотора, когда неисправен, по меньшей мере, один из первого модуля управления, первого электромотора и модуля определения крутящего момента в состоянии, в котором первый модуль управления и второй модуль управления выполняют управление поворотом с использованием двух электромоторов. Кроме того, первый модуль управления выполнен с возможностью осуществлять управление усилением с использованием одного электромотора, когда неисправен, по меньшей мере, один из второго модуля управления и второго электромотора в состоянии, в котором первый модуль управления и второй модуль управления выполняют управление поворотом с использованием двух электромоторов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является схемой конфигурации устройства рулевого управления;
Фиг. 2 является видом, иллюстрирующим режим управления в зависимости от результата диагностики; и
Фиг. 3 является схемой переключений режима управления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Конфигурация
Сначала описывается конфигурация устройства рулевого управления.
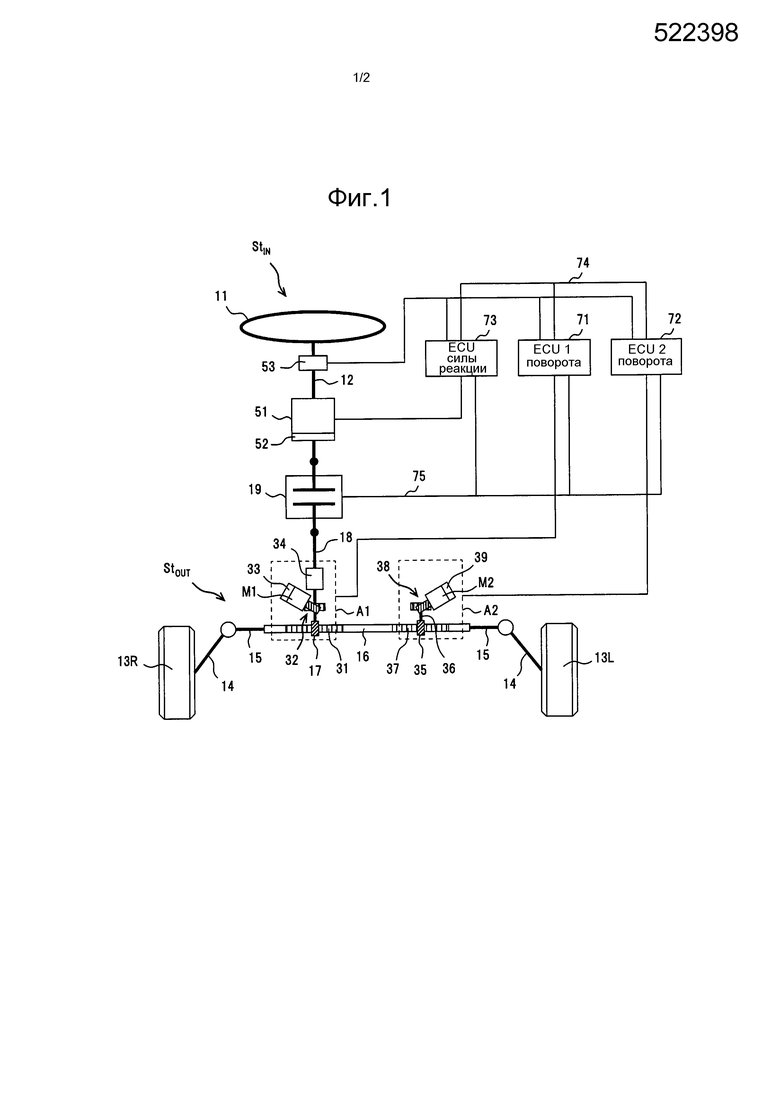
Фиг. 1 является схемой конфигурации устройства рулевого управления.
Руль 11 соединяется с рулевым валом 12. Колеса 13L и 13R (поворотные колеса) соединяются с валом 18 первой шестерни через рычаги 14 поворотных кулаков, поперечные рулевые тяги 15, вал 16 зубчатой рейки и ведущую шестерню 17, в этом порядке. Рулевой вал 12 и вал 18 первой шестерни соединяются между собой через муфту 19 переключаемым способом таким образом, что они могут соединяться или разъединяться.
В этой конфигурации, руль 11 и рулевой вал 12, которые предусмотрены на стороне входного вала муфты 19, представляют собой входной рулевой механизм StIN, в котором рулевой вал 12 вращается посредством операции руления водителем. Кроме того, рычаги 14 поворотных кулаков, поперечные рулевые тяги 15, вал 16 зубчатой рейки, ведущая шестерня 17 и вал 18 первой шестерни предусмотрены на стороне выходного вала муфты 19, представляют собой выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колеса 13L и 13R посредством вращения вала 18 первой шестерни.
[0009] Следовательно, в состоянии, в котором муфта 19 соединена (зацеплена) при вращении руля 11, вращаются рулевой вал 12, муфта 19 и вал 18 первой шестерни. Вращательное движение вала 18 первой шестерни преобразуется в возвратно-поступательное перемещение поперечных рулевых тяг 15 посредством вала 16 зубчатой рейки и ведущей шестерни 17, возвратно-поступательное перемещение поворачивает колеса 13L и 13R через рычаги 14 поворотных кулаков.
Муфта 19 включает в себя электромагнитную муфту с зацеплением без возбуждения. Иными словами, когда не возбуждена катушка индуктивности, ролик зацепляется между кулачковой поверхностью входного вала и внешним кольцом выходного вала, например, посредством механизма кулачкового ролика для того, чтобы зацеплять входной вал с выходным валом. С другой стороны, когда возбуждена катушка индуктивности, зацепление ролика между кулачковой поверхностью входного вала и внешним кольцом выходного вала прекращается посредством притяжения якоря. Входной вал и выходной вал разъединяются.
[0010] Вал 16 зубчатой рейки идет в поперечном направлении кузова транспортного средства (в направлении ширины транспортного средства), и шестерня 31 зубчатой рейки (зубья) формируется на одной стороне вала зубчатой рейки (в этом примере, на правой стороне кузова транспортного средства). Ведущая шестерня 17 зацепляет шестерню 31 зубчатой рейки. Состояние зацепления шестерни 31 зубчатой рейки и ведущей шестерни 17 регулируется посредством механизма держателя.
Вал 18 первой шестерни включает в себя входной вал на стороне муфты и выходной вал на стороне ведущей шестерни. Выходной вал соединяется с первым поворотным электромотором M1, например, через червячную шестерню 32. Круговой датчик 33 позиции, определяющий угол поворота электромотора, предоставляется на первом поворотном электромоторе M1.
[0011] Червячная шестерня 32 включает в себя червячное колесо, соединенное с валом 18 первой шестерни, и червяк, соединенный с первым поворотным электромотором M1. Червячный вал пересекает под углом вал червячного колеса. Это служит для уменьшения размера модуля в перпендикулярном направлении к валу 18 первой шестерни.
В червячной шестерне 32, угол кручения червяка задается больше угла естественного откоса (угла трения), так что червячное колесо может вращаться посредством вращения червяка, и червяк может вращаться посредством вращения червячного колеса, т.е. может приводиться в движение в обратном направлении.
[0012] Датчик 34 крутящего момента предоставляется между входным валом и выходным валом на валу 18 первой шестерни.
Ведущая шестерня 17, выходной вал вала 18 первой шестерни, червячная шестерня 32, первый поворотный электромотор M1, круговой датчик 33 позиции и датчик 34 крутящего момента сконфигурированы как интегрированный составной компонент (сборочный узел). Он упоминается как первый актуатор A1. Первый актуатор A1 используется совместно в качестве компонентов устройства электрического усилителя рулевого управления.
[0013] Согласно первому актуатору A1, когда первый поворотный электромотор M1 приводится в действие в состоянии, в котором муфта 19 разъединена, вал 18 первой шестерни вращается через червячную шестерню 32. Следовательно, угол поворота колес 13L и 13R варьируется в зависимости от угла поворота первого поворотного электромотора M1. Следовательно, посредством управления приведением в действие первого поворотного электромотора M1 в зависимости от операции руления водителем, когда муфта 19 разъединена, достигаются требуемые характеристики управления рулением в качестве функции руления по проводам.
[0014] Кроме того, когда первый поворотный электромотор M1 приводится в действие в состоянии, в котором муфта 19 соединена, крутящий момент электромотора передается на вал 18 первой шестерни через червячную шестерню 32. Следовательно, посредством управления приведением в действие первого поворотного электромотора M1 в зависимости от операции руления водителем, когда муфта 19 соединена, достигаются требуемые характеристики усиления, уменьшающие рабочую нагрузку на водителя.
Вал 36 второй шестерни соединяется с другой стороной вала 16 зубчатой рейки (в этом примере, с левой стороной кузова транспортного средства) через ведущую шестерню 35. Иными словами, шестерня 37 зубчатой рейки (зубья) формируется с другой стороны вала 16 зубчатой рейки (в этом примере, с левой стороной кузова транспортного средства). Ведущая шестерня 35 зацепляет шестерню 37 зубчатой рейки. Состояние зацепления шестерни 37 зубчатой рейки и ведущей шестерни 35 регулируется посредством механизма держателя.
[0015] Второй поворотный электромотор M2 соединяется с валом 36 второй шестерни, например, через червячную шестерню 38. Второй поворотный электромотор M2 представляет собой идентичный тип электромотора с первым поворотным электромотором M1. Круговой датчик 39 позиции, определяющий угол поворота электромотора, предоставляется на втором поворотном электромоторе M2.
Червячная шестерня 38 включает в себя червячное колесо, соединенное с валом 36 второй шестерни, и червяк, соединенный со вторым поворотным электромотором M2. Червячный вал пересекает под углом вал червячного колеса. Это служит для уменьшения размера модуля в перпендикулярном направлении к валу 36 второй шестерни.
В червячной шестерне 38, угол кручения червяка задается больше угла естественного откоса (угла трения), так что червячное колесо может вращаться посредством вращения червяка, и червяк может вращаться посредством вращения червячного колеса, т.е. может приводиться в движение в обратном направлении.
[0016] Ведущая шестерня 35, выходной вал вала 36 второй шестерни, червячная шестерня 38, второй поворотный электромотор M2 и круговой датчик 39 позиции сконфигурированы как интегрированный составной компонент (сборочный узел). Он упоминается как второй актуатор A2.
Согласно второму актуатору A2, когда второй поворотный электромотор M2 приводится в действие в состоянии, в котором муфта 19 разъединена, вал 36 второй шестерни вращается через червячную шестерню 38. Следовательно, угол поворота колес 13L и 13R варьируется в зависимости от угла поворота второго поворотного электромотора M2. Следовательно, посредством управления приведением в действие второго поворотного электромотора M2 в зависимости от операции руления водителем, когда муфта 19 разъединена, достигаются требуемые характеристики управления рулением в качестве функции руления по проводам.
[0017] Электромотор 51 для формирования силы реакции соединяется с рулевым валом 12. Электромотор 51 для формирования силы реакции включает в себя ротор, вращающийся вместе с рулевым валом 12, и статор, который обращен к ротору и прикреплен к корпусу. Ротор формируется посредством размещения магнитов с равными интервалами в направлении вдоль окружности и посредством их прикрепления к сердечнику ротора, например, за счет формования со вставкой. Статор формируется посредством размещения железных сердечников, на которые наматываются катушки с равными интервалами в направлении вдоль окружности, и посредством их прикрепления к корпусу, например, посредством напряженной посадки. Круговой датчик 52 позиции, определяющий угол поворота электромотора, предоставляется на электромоторе 51 для формирования силы реакции.
Датчик 53 угла поворота при рулении предоставляется на рулевом валу 12.
Согласно электромотору 51 для формирования силы реакции, когда электромотор 51 для формирования силы реакции приводится в действие в состоянии, в котором муфта 19 разъединена, крутящий момент электромотора передается на рулевой вал 12. Следовательно, посредством управления приведением в действие электромотора 51 для формирования силы реакции в зависимости от силы реакции, принимаемой от поверхности дороги в то время, когда муфта 19 разъединена, чтобы выполнять руление по проводам, достигаются требуемые характеристики силы реакции, предоставляющие рабочую силу реакции на операцию руления водителем.
Выше описана конфигурация устройства рулевого управления.
[0018] Далее описывается конфигурация системы управления.
Настоящий вариант осуществления включает в себя первый контроллер 71 поворота (ECU 1 поворота), второй контроллер 2 поворота (ECU 2 поворота) и контроллер 73 силы реакции (ECU силы реакции). Соответствующие контроллеры включают в себя, например, микрокомпьютеры.
Первый контроллер 71 поворота принимает сигналы из кругового датчика 33 позиции, датчика 34 крутящего момента и датчика 53 угла поворота при рулении и управляет приведением в действие первого поворотного электромотора M1 через схему формирователя сигналов управления. Второй контроллер 72 поворота принимает сигналы из кругового датчика 39 позиции и датчика 53 угла поворота при рулении и управляет приведением в действие второго поворотного электромотора M2 через схему формирователя сигналов управления. Контроллер 73 силы реакции принимает сигналы из кругового датчика 52 позиции и датчика 53 угла поворота при рулении и управляет приведением в действие электромотора 51 для формирования силы реакции через схему формирователя сигналов управления.
[0019] Круговой датчик 33 позиции определяет угол θm1 поворота электромотора для первого поворотного электромотора M1. Круговой датчик 33 позиции выводит сигнал определения в зависимости от угла поворота ротора из катушки ротора, когда сигнал возбуждения вводится в обмотку статора. Первый контроллер 71 поворота выводит сигнал возбуждения в обмотку статора и определяет угол θm1 поворота электромотора для первого поворотного электромотора M1 на основе амплитудной модуляции сигнала определения, принимаемого из катушки ротора, посредством схемы обработки сигналов. Следует отметить, что первый контроллер 71 поворота трактует правый поворот в качестве положительного значения и трактует левый поворот в качестве отрицательного значения.
Аналогично, угол θm2 поворота электромотора второго поворотного электромотора M2 определяется посредством второго контроллера 72 поворота через круговой датчик 39 позиции, и угол θr поворота электромотора 51 для формирования силы реакции определяется посредством контроллера 73 силы реакции через круговой датчик 52 позиции.
[0020] Датчик 34 крутящего момента определяет крутящий момент Ts, вводимый на вал 18 первой шестерни. Датчик 34 крутящего момента определяет угол кручения торсионного стержня, размещенного между стороной входного вала и стороной выходного вала для вала 18 первой шестерни, например, с помощью прибора на эффекте Холла, и выводит в первый контроллер 71 поворота электрический сигнал, получаемый посредством преобразования изменения в плотности магнитного потока, сформированной вследствие относительного углового смещения между многополюсным магнитом и вилкой. Первый контроллер 71 поворота определяет крутящий момент Ts на основе входного электрического сигнала. Следует отметить, что первый контроллер 71 поворота трактует руление вправо водителем в качестве положительного значения и трактует руление влево в качестве отрицательного значения.
[0021] Датчик 53 угла поворота при рулении включает в себя кодовый датчик угла поворота, например, и определяет угол θs поворота при рулении рулевого вала 12. Датчик 53 угла поворота при рулении определяет, в то время как дискообразная измерительная шкала вращается вместе с рулевым валом 12, свет, проходящий через щель измерительной шкалы, с помощью двух фототранзисторов и выводит в соответствующие контроллеры импульсный сигнал в ассоциации с вращением рулевого вала 12. Соответствующие контроллеры определяют угол θs поворота при рулении рулевого вала 12 на основе входного импульсного сигнала. Следует отметить, что соответствующие контроллеры трактуют руление вправо в качестве положительного значения и трактуют руление влево в качестве отрицательного значения.
[0022] Следует отметить, что контроллеры соединяются между собой через линию 74 связи, чтобы допускать обмен данными друг с другом. Иными словами, создается тракт связи, приспосабливающий стандарт бортовой сети связи (бортовой LAN), такой как мультиплексная CSMA/CA-связь (CAN: контроллерная сеть), Flex Ray и т.п.
Соответствующие контроллеры соединяются с муфтой 19 через линию 75 связи. Линия 75 связи представляет собой тракт связи для вывода сигнала управления муфтой, допускающего переключение муфты 19 таким образом, что муфта соединяется или разъединяется. Сигнал управления муфтой представляет собой сигнал для разъединения муфты 19. Когда соответствующие контроллеры выводят сигнал управления муфтой, муфта 19 разъединяется. Когда любой из контроллеров прекращает вывод сигнала управления муфтой, муфта 19 соединяется.
Выше описана конфигурация системы управления.
[0023] Далее описываются режимы управления.
В настоящем варианте осуществления, предусмотрены SBW-режим с использованием двух электромоторов (2M-SBW), EPS-режим с использованием двух электромоторов (2M-EPS), SBW-режим с использованием одного электромотора (1M-SBW), EPS-режим с использованием одного электромотора (1M-EPS) и режим ручного руления (MS).
В SBW-режиме с использованием двух электромоторов, управление рулением по проводам выполняется посредством двух электромоторов. В EPS-режиме с использованием двух электромоторов, управление рулением с электрическим усилением выполняется посредством двух электромоторов. Кроме того, в SBW-режиме с использованием одного электромотора, управление рулением по проводам выполняется только посредством одного электромотора. В EPS-режиме с использованием одного электромотора, управление рулением с электрическим усилением выполняется только посредством одного электромотора. Далее в режиме ручного руления, полностью прекращается управление рулением.
[0024] SBW-режим с использованием двух электромоторов
В SBW-режиме с использованием двух электромоторов в состоянии, в котором выводится сигнал управления муфтой для того, чтобы разъединять муфту 19, первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, и второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2, за счет чего выполняется управление углом поворота. Иными словами, первый поворотный электромотор M1 и второй поворотный электромотор M2 взаимодействуют таким образом, чтобы совместно использовать и выводить необходимую вращающую силу. С другой стороны, контроллер 73 силы реакции управляет приведением в действие электромотора 51 для формирования силы реакции и за счет этого выполняет управление силой реакции. Таким образом, достигаются требуемые характеристики руления в качестве функции руления по проводам, и достигается приятное ощущение при выполнении действий.
[0025] Первый контроллер 71 поворота и второй контроллер 72 поворота задают целевой угол θw* поворота, соответствующий углу θs поворота при рулении, и оценивают фактический угол θw поворота. Затем первый контроллер 71 поворота и второй контроллер 72 поворота принимают углы θm1 и θm2 поворота электромотора и управляют приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 таким образом, что фактический угол θw поворота совпадает с целевым углом θw* поворота, посредством использования, например, надежного способа согласования с моделью.
[0026] Целевой угол θw* поворота задается, например, в зависимости от скорости V транспортного средства. Иными словами, при рулении на месте или движении на низкой скорости, целевой угол θw* поворота задается таким образом, чтобы получать большой угол θw поворота с небольшим углом θs поворота при рулении, с тем чтобы уменьшать рабочую нагрузку на водителя. Кроме того, при движении на высокой скорости, целевой угол θw* поворота задается таким образом, чтобы подавлять изменение угла θw поворота, соответствующем изменению угла θs поворота при рулении, чтобы подавлять чрезмерно чувствительное поведение транспортного средства, чтобы обеспечивать устойчивость при движении.
Фактический угол θw поворота оценивается на основе угла θs поворота при рулении, угла θm1 поворота электромотора, угла θm2 поворота электромотора и т.п.
[0027] Контроллер 73 силы реакции задает целевой крутящий момент Tr* силы реакции, соответствующий силе реакции, принимаемой от поверхности дороги при операции руления, и управляет приведением в действие электромотора 51 для формирования силы реакции таким образом, что крутящий момент электромотора 51 для формирования силы реакции совпадает с целевым крутящим моментом Tr* силы реакции.
Целевой крутящий момент Tr* силы реакции задается на основе, например, угла θs поворота при рулении, тока Im1, протекающего в первом поворотном электромоторе M1, тока Im2, протекающего во втором поворотном электромоторе M2, и т.п.
[0028] EPS-режим с использованием двух электромоторов
В EPS-режиме с использованием двух электромоторов в состоянии, в котором прекращается вывод сигнала управления муфтой, и в силу этого муфта 19 соединяется, первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, и второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2, за счет чего выполняется управление усилением. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления, и дополнительно, рабочая нагрузка на водителя уменьшается посредством функции электрического усилителя рулевого управления.
Первый контроллер 71 поворота и второй контроллер 72 поворота задают целевой усиливающий крутящий момент Ta* и управляют приведением в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 таким образом, что крутящий момент первого поворотного электромотора M1 совпадает с целевым усиливающим крутящим моментом Ta*.
[0029] Целевой усиливающий крутящий момент Ta* задается, например, в зависимости от скорости V транспортного средства. Иными словами, при рулении на месте или движении на низкой скорости, целевой усиливающий крутящий момент Ta* задается большим, с тем чтобы уменьшать рабочую нагрузку на водителя. Кроме того, при движении на высокой скорости, целевой усиливающий крутящий момент Ta* задается меньшим, с тем чтобы подавлять чрезмерно чувствительное поведение транспортного средства, чтобы обеспечивать устойчивость при движении.
С другой стороны, в EPS-режиме с использованием двух электромоторов, разъединяется релейная схема электромотора 51 для формирования силы реакции. Это служит для того, чтобы не допускать приведения в действие электромотора 51 для формирования силы реакции в качестве нагрузки посредством вращения рулевого вала 12, когда водитель выполняет операцию руления, и когда первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, и второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2.
[0030] SBW-режим с использованием одного электромотора
В SBW-режиме с использованием одного электромотора в состоянии, в котором выводится сигнал управления муфтой для того, чтобы разъединять муфту 19, и первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1 (без приведения в действие), второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2, чтобы выполнять управление углом поворота. Иными словами, второй поворотный электромотор M2 выводит только необходимую вращающую силу. С другой стороны, контроллер 73 силы реакции управляет приведением в действие электромотора 51 для формирования силы реакции, чтобы выполнять управление силой реакции. Таким образом, достигаются требуемые характеристики руления в качестве функции руления по проводам, и достигается приятное ощущение при выполнении действий.
[0031] Задание целевого угла θw* поворота, способ управления вторым поворотным электромотором M2, задание целевого реактивного крутящего момента Tr* и способ управления электромотором 51 для формирования силы реакции являются идентичными заданиям и способам в SBW-режиме с использованием двух электромоторов.
С другой стороны, в SBW-режиме с использованием одного электромотора, разъединяется релейная схема первого поворотного электромотора M1, в силу чего первый поворотный электромотор M1 отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие первого поворотного электромотора M1 в качестве нагрузки посредством возвратно-поступательного перемещения вала 16 зубчатой рейки, когда второй контроллер 72 поворота управляет приведением в действие второго поворотного электромотора M2.
[0032] EPS-режим с использованием одного электромотора
В EPS-режиме с использованием одного электромотора в состоянии, в котором прекращается вывод сигнала управления муфтой, и в силу этого муфта 19 соединяется, и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2 (без приведения в действие), первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1, за счет чего выполняется управление усилением. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления, и дополнительно, рабочая нагрузка на водителя уменьшается посредством функции электрического усилителя рулевого управления.
Задание целевого усиливающего крутящего момента Ta* и способ управления первого поворотного электромотора M1 являются идентичными заданию и способу в EPS-режиме с использованием двух электромоторов.
[0033] С другой стороны, в EPS-режиме с использованием одного электромотора, разъединяется релейная схема второго поворотного электромотора M2, в силу чего второй поворотный электромотор M2 отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие второго поворотного электромотора M2 в качестве нагрузки посредством возвратно-поступательного перемещения вала 16 зубчатой рейки, когда водитель выполняет операцию руления, и когда первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1. По аналогичной причине, разъединяется релейная схема электромотора 52 для формирования силы реакции, в силу чего электромотор 52 для формирования силы реакции отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие электромотора 52 для формирования силы реакции в качестве нагрузки посредством вращения рулевого вала 12, когда водитель выполняет операцию руления, и когда первый контроллер 71 поворота управляет приведением в действие первого поворотного электромотора M1.
[0034] Режим ручного руления
В режиме ручного руления в состоянии, в котором прекращается вывод сигнала управления муфтой, и в силу этого муфта 19 соединяется, первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1 (без приведения в действие), и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2 (без приведения в действие). Иными словами, полностью прекращается управление рулением посредством соответствующих контроллеров. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления.
В режиме ручного руления, разъединяются релейные схемы первого поворотного электромотора M1 и второго поворотного электромотора M2, в силу чего первый поворотный электромотор M1 и второй поворотный электромотор M2 разъединяются от электрической схемы. Это служит для того, чтобы не допускать приведения в действие первого поворотного электромотора M1 и второго поворотного электромотора M2 в качестве нагрузок посредством возвратно-поступательного перемещения вала 16 зубчатой рейки, когда водитель выполняет операцию руления. По аналогичной причине, разъединяется релейная схема электромотора 52 для формирования силы реакции, в силу чего электромотор 52 для формирования силы реакции отсоединяется от электрической схемы. Это служит для того, чтобы не допускать приведения в действие электромотора 52 для формирования силы реакции в качестве нагрузки посредством вращения рулевого вала 12, когда водитель выполняет операцию руления.
Выше описано краткое представление режимов управления.
[0035] Далее описывается отказоустойчивый режим.
Соответствующие контроллеры выполняют самодиагностику в отношении того, являются или нет их системы управления неисправными, и переключают режим управления в зависимости от результата диагностики. Иными словами, первый контроллер 71 поворота диагностирует то, неисправен или нет первый контроллер 71 поворота, первый актуатор A1, включающий в себя датчик 34 крутящего момента, либо система электропроводки. Кроме того, второй контроллер 72 поворота диагностирует то, неисправен или нет второй контроллер 72 поворота, второй актуатор A2 без датчика крутящего момента, либо система электропроводки. Кроме того, контроллер 73 силы реакции диагностирует то, неисправен или нет контроллер 73 силы реакции, электромотор 52 для формирования силы реакции либо система электропроводки.
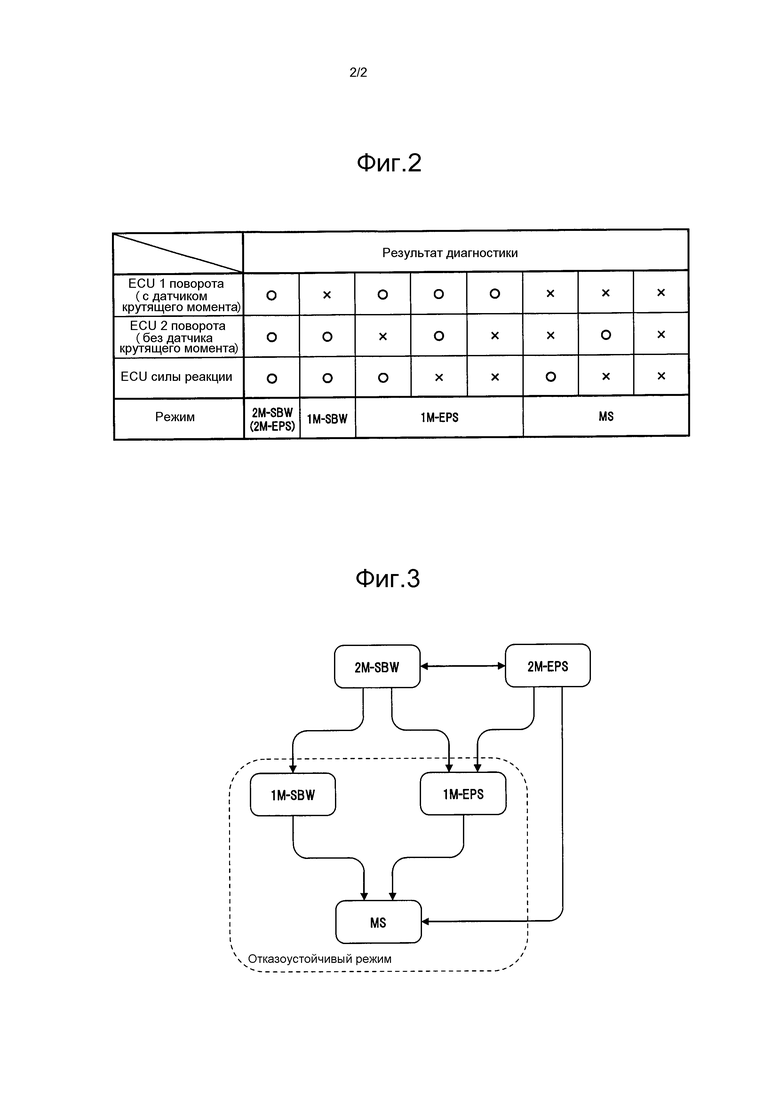
[0036] Фиг. 2 является видом, иллюстрирующим режим управления в зависимости от результата диагностики.
В данном документе, результат диагностики каждого контроллера описывается как "o" в нормальном случае, если не определена неисправность, или в качестве "x" в случае, если определена неисправность.
Во-первых, когда все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции являются нормальными, задается SBW-режим с использованием двух электромоторов. Тем не менее, когда низкое напряжение прикладывается к первому поворотному электромотору M1 и второму поворотному электромотору M2, когда первый поворотный электромотор M1 и второй поворотный электромотор M2 перегреваются, когда переключатель зажигания включен при запуске (до тех пор, пока не разъединится муфта 19), когда угол θw поворота достигает максимального угла поворота в торцевом примыкании и т.п., EPS-режим с использованием двух электромоторов задается в качестве временной меры.
[0037] С другой стороны, когда неисправна, по меньшей мере, одна из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции, режим управления переключается на любой из SBW-режима с использованием одного электромотора, EPS-режима с использованием одного электромотора и режима ручного руления.
Во-первых, предполагается, что система управления второго контроллера 72 поворота и система управления контроллера 73 силы реакции являются нормальными, и неисправна система управления первого контроллера 71 поворота. В этом случае, задается SBW-режим с использованием одного электромотора, поскольку неисправны только функция руления по проводам и функция электрического усилителя рулевого управления посредством первого актуатора A1, и поддерживаются функция руления по проводам посредством второго актуатора A2 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции.
[0038] Кроме того, предполагается, что система управления первого контроллера 71 поворота и система управления контроллера 73 силы реакции являются нормальными, и неисправна система управления второго контроллера 72 поворота. В этом случае, задается EPS-режим с использованием одного электромотора, поскольку неисправна только функция руления по проводам посредством второго актуатора A2, и поддерживается функция электрического усилителя рулевого управления посредством первого актуатора A1.
Кроме того, предполагается, что система управления первого контроллера 71 поворота и система управления второго контроллера 72 поворота являются нормальными, и неисправна система управления контроллера 73 силы реакции. В этом случае, задается EPS-режим с использованием одного электромотора, поскольку неисправна только функция формирования силы реакции посредством электромотора 52 для формирования силы реакции, и поддерживается функция электрического усилителя рулевого управления посредством первого актуатора A1.
[0039] Кроме того, предполагается, что система управления первого контроллера 71 поворота является нормальной, и неисправны система управления второго контроллера 72 поворота и система управления контроллера 73 силы реакции. В этом случае, задается EPS-режим с использованием одного электромотора, поскольку неисправны только функция руления по проводам посредством второго актуатора A2 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции, и поддерживается функция электрического усилителя рулевого управления посредством первого актуатора A1.
[0040] Кроме того, предполагается, что система управления контроллера 73 силы реакции является нормальной, и неисправны система управления первого контроллера 71 поворота и система управления второго контроллера 72 поворота. В этом случае, задается режим ручного руления, поскольку неисправны функция руления по проводам и функция электрического усилителя рулевого управления посредством первого актуатора A1 и функция руления по проводам посредством второго актуатора A2, хотя поддерживается функция формирования силы реакции посредством электромотора 52 для формирования силы реакции.
[0041] Кроме того, предполагается, что система управления второго контроллера 72 поворота является нормальной, и неисправны система управления первого контроллера 71 поворота и система управления контроллера 73 силы реакции. В этом случае, задается режим ручного руления, поскольку неисправны функция руления по проводам или функция электрического усилителя рулевого управления посредством первого актуатора A1 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции, хотя поддерживается функция руления по проводам посредством второго актуатора A2.
Затем предполагается, что неисправны все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции. В этом случае, задается режим ручного руления, поскольку неисправны все из функции руления по проводам и функции электрического усилителя рулевого управления посредством первого актуатора A1, функции руления по проводам посредством второго актуатора A2 и функции формирования силы реакции посредством электромотора 52 для формирования силы реакции.
Выше описано краткое представление отказоустойчивого режима.
[0042] Далее описывается переключение режима управления.
Фиг. 3 является схемой переключений режима управления.
Во-первых, когда все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции являются нормальными, фактически задается SBW-режим с использованием двух электромоторов. Кроме того, когда низкое напряжение прикладывается к первому поворотному электромотору M1 и второму поворотному электромотору M2, когда первый поворотный электромотор M1 и второй поворотный электромотор M2 перегреваются, когда переключатель зажигания включен при запуске (до тех пор, пока не разъединится муфта 19), когда угол θw поворота достигает максимального угла поворота в торцевом примыкании и т.п., EPS-режим с использованием двух электромоторов задается в качестве временной меры. Затем, когда исключается состояние, в котором низкое напряжение прикладывается к первому поворотному электромотору M1 и второму поворотному электромотору M2, или, в котором первый поворотный электромотор M1 и второй поворотный электромотор M2 перегреваются, когда муфта 19 разъединена, или снижается угол θ поворота, задается SBW-режим с использованием двух электромоторов. Таким образом, при условии, что все из системы управления первого контроллера 71 поворота, системы управления второго контроллера 72 поворота и системы управления функцией контроллера 73 силы реакции являются нормальными, режим управления переключается между SBW-режимом с использованием двух электромоторов и EPS-режимом с использованием двух электромоторов.
[0043] Кроме того, когда неисправность системы управления первого контроллера 71 поворота вызывается в качестве первичного отказа в состоянии SBW-режима с использованием двух электромоторов, режим управления переключается на SBW-режим с использованием одного электромотора. Затем, когда неисправность, по меньшей мере, одной из системы управления второго контроллера 72 поворота или системы управления контроллера 73 силы реакции вызывается в качестве вторичного отказа в состоянии SBW-режима с использованием одного электромотора, режим управления переключается на режим ручного руления. Таким образом, режим управления не переключается непосредственно из SBW-режима с использованием двух электромоторов на режим ручного руления без перехода через SBW-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов.
[0044] Кроме того, когда неисправность, по меньшей мере, одной из системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции вызывается в качестве первичного отказа в состоянии SBW-режима с использованием двух электромоторов, режим управления переключается на EPS-режим с использованием одного электромотора. Затем, когда неисправность системы управления первого контроллера 71 поворота вызывается в качестве вторичного отказа в состоянии EPS-режима с использованием одного электромотора, режим управления переключается на режим ручного руления. Таким образом, режим управления не переключается непосредственно из SBW-режима с использованием двух электромоторов на режим ручного руления без перехода через EPS-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов.
[0045] Кроме того, когда неисправность, по меньшей мере, одной из системы управления второго контроллера 72 поворота и системы управления контроллера 73 силы реакции вызывается в качестве первичного отказа в состоянии EPS-режима с использованием двух электромоторов в качестве временной меры, режим управления переключается на EPS-режим с использованием одного электромотора. Затем, когда неисправность системы управления первого контроллера 71 поворота вызывается в качестве вторичного отказа в состоянии EPS-режима с использованием одного электромотора, режим управления переключается на режим ручного руления. Таким образом, режим управления не переключается непосредственно из EPS-режима с использованием двух электромоторов на режим ручного руления без перехода через EPS-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов.
Следует отметить, что, когда неисправность системы управления первого контроллера 71 поворота вызывается в состоянии EPS-режима с использованием двух электромоторов в качестве временной меры, режим управления непосредственно переключается в режим ручного руления, поскольку переключение в EPS-режим с использованием одного электромотора является невозможным.
Выше описано переключение режима управления.
[0046] Работа
Далее описывается работа первого варианта осуществления.
В настоящем варианте осуществления, предусмотрены первый поворотный электромотор M1 и второй поворотный электромотор M2, способные обеспечить движущую силу для выходного поворотного механизма StOUT, чтобы выполнять SBW-режим с использованием двух электромоторов, в котором колеса 13L и 13R поворачиваются посредством двух этих электромоторов. Таким образом, достигаются требуемые характеристики руления в качестве функции руления по проводам. Кроме того, посредством приспособления конфигурации, в которой колеса 13L и 13R поворачиваются посредством двух электромоторов, можно совместно использовать необходимую движущую силу для выходного поворотного механизма StOUT. Следовательно, можно подавлять увеличение размера электромотора и иметь превосходные характеристики расположения по сравнению с конфигурацией, в которой колеса 13L и 13R поворачиваются посредством одного электромотора.
[0047] Кроме того, в конфигурации, в которой колеса 13L и 13R поворачиваются посредством двух электромоторов, даже если неисправна любая одна из систем управления, можно использовать другую систему управления, которая не является неисправной. В настоящем варианте осуществления, предусмотрено два режима управления, включающие в себя SBW-режим с использованием одного электромотора и EPS-режим с использованием одного электромотора в качестве отказоустойчивого режима для первичного отказа, в котором неисправна только любая одна из систем управления.
[0048] Во-первых, предполагается, что система управления второго контроллера 72 поворота и система управления контроллера 73 силы реакции являются нормальными, и неисправна система управления первого контроллера 71 поворота. В этом случае, задается SBW-режим с использованием одного электромотора, поскольку неисправны только функция руления по проводам и функция электрического усилителя рулевого управления посредством первого актуатора A1, и поддерживаются функция руления по проводам посредством второго актуатора A2 и функция формирования силы реакции посредством электромотора 52 для формирования силы реакции. Таким образом, поскольку функция руления по проводам поддерживается, можно достигать требуемых характеристик руления и приятного ощущения при выполнении действий.
[0049] Кроме того, предполагается, что система управления первого контроллера 71 поворота и система управления контроллера 73 силы реакции являются нормальными, и неисправна система управления второго контроллера 72 поворота. В этом случае, задается EPS-режим с использованием одного электромотора, поскольку неисправна только функция руления по проводам посредством второго актуатора A2, и поддерживается функция электрического усилителя рулевого управления посредством первого актуатора A1. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления, и дополнительно, рабочая нагрузка на водителя уменьшается посредством функции электрического усилителя рулевого управления.
[0050] Как упомянуто выше, когда первичный отказ вызывается в состоянии, в котором выполняется SBW-режим с использованием двух электромоторов, в зависимости от точки возникновения неисправности определяется то, переключается режим управления на SBW-режим с использованием одного электромотора или на EPS-режим с использованием одного электромотора. Аспект, который должен учитываться при различении, заключается в том, имеется или нет интерфейс с датчиком 34 крутящего момента, т.е. в том, можно или нет получать определенное значение датчика 34 крутящего момента. Следовательно, когда система управления первого контроллера 71 поворота не является неисправной, режим управления переключается на EPS-режим с использованием одного электромотора.
[0051] Следует отметить, что хотя можно управлять приведением в действие первого поворотного электромотора M1 посредством второго контроллера 72 поворота, чтобы выполнять SBW-режим с использованием одного электромотора посредством первого поворотного электромотора M1, EPS-режим с использованием одного электромотора приспосабливается с учетом нагрузки на первый поворотный электромотор M1. Один электромотор сконструирован с возможностью выводить только необходимую вращающую силу. Тем не менее, имеется потребность в уменьшении размера электромотора в максимально возможной степени. Таким образом, не всегда обеспечивается достаточный допустимый запас в отношении рабочих характеристик электромотора. Следовательно, активно используется EPS-режим с использованием одного электромотора, выполняющий управление рулением с электрическим усилением посредством одного электромотора, а не SBW-режим с использованием одного электромотора, выполняющий управление рулением по проводам посредством одного электромотора.
[0052] Кроме того, не только первый поворотный электромотор M1, но также и второй поворотный электромотор M2 могут выполнять EPS-режим с использованием одного электромотора посредством предоставления датчика крутящего момента на втором поворотном электромоторе M2. Тем не менее, это приводит к увеличению стоимости. Следовательно, интерфейсы с датчиками крутящего момента не конструируются в двух системах. Вместо этого, предпочтительно назначать различные роли, т.е. для EPS и для не-EPS (для SBW), первому поворотному электромотору M1 и второму поворотному электромотору M2, соответственно, в качестве настоящего варианта осуществления, поскольку это является экономически эффективным.
[0053] Как упомянуто выше, когда первичный отказ вызывается в состоянии, в котором выполняется SBW-режим с использованием двух электромоторов, режим управления переключается на любой SBW-режим с использованием одного электромотора или EPS-режим с использованием одного электромотора в зависимости от точки возникновения неисправности. Таким образом, даже когда неисправна любая одна из систем управления, используется другая система управления, которая не является неисправной. Таким образом, можно осуществлять отказоустойчивый режим при полном использовании преимущества предоставления двух электромоторов.
С другой стороны, предоставляется отказоустойчивый режим в отношении вторичного отказа, в котором неисправна другая система управления, несмотря на отказоустойчивый режим в отношении первичного отказа. Именно в режиме ручного руления полностью прекращается управление рулением посредством соответствующих контроллеров в состоянии, в котором прекращены выводы сигналов управления муфтой, и муфта 19 соединяется. Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления.
[0054] Например, когда неисправна система управления второго контроллера 72 поворота или система управления контроллера 73 силы реакции в состоянии, в котором SBW-режим с использованием одного электромотора выполняется вследствие неисправности системы управления первого контроллера 71 поворота в качестве первичного отказа, режим управления переключается на режим ручного руления. Кроме того, когда неисправна система управления первого контроллера 71 поворота в состоянии, в котором EPS-режим с использованием одного электромотора выполняется вследствие неисправности системы управления второго контроллера 72 поворота в качестве первичного отказа, режим управления также переключается на режим ручного руления.
[0055] Как упомянуто выше, когда повторный отказ вызывается в состоянии, в котором выполняется SBW-режим с использованием одного электромотора или EPS-режим с использованием одного электромотора, режим управления переключается на режим ручного руления.
Таким образом, режим управления переключается из SBW-режима с использованием двух электромоторов на SBW-режим с использованием одного электромотора или на EPS-режим с использованием одного электромотора вследствие первичного отказа, и дополнительно переключается на режим ручного руления в конечном счете вследствие вторичного отказа. Иными словами, режим управления не переключается непосредственно из SBW-режима с использованием двух электромоторов на режим ручного руления без перехода через SBW-режим с использованием одного электромотора или на EPS-режим с использованием одного электромотора. Переключение режима управления является избыточным, так что режим управления переключается пошагово в зависимости от уровня интенсивности отказов. Следовательно, можно конструировать систему управления, не вызывающую некомфортное ощущение у водителя.
[0056] Модификация
В настоящем варианте осуществления, предусмотрено два электромотора, включающих в себя первый поворотный электромотор M1 и второй поворотный электромотор M2, в качестве электромоторов, обеспечивающих движущую силу для выходного поворотного механизма StOUT. Настоящее раскрытие сущности не ограничено этим и может включать в себя три или более электромоторов. Таким образом, посредством увеличения числа электромоторов для обеспечения движущей силы для выходного поворотного механизма StOUT, можно уменьшать движущую силу, требуемую для одного электромотора, с тем чтобы уменьшать размер одного электромотора.
[0057] В настоящем варианте осуществления, первый поворотный электромотор M1 соединяется с валом 18 первой шестерни через червячную шестерню 32, настоящее раскрытие сущности не ограничено этим. Иными словами, требуется только обеспечение движущей силы для выходного поворотного механизма StOUT. Следовательно, может приспосабливаться конфигурация прямого привода, в которой исключается червячная шестерня 32, например, посредством конструирования первого поворотного электромотора M1, включающего в себя ротор, вращающийся вместе с валом первой шестерни, и статор для ротора, который крепится на корпусе. Кроме того, второй поворотный электромотор M2 соединяется с валом 36 второй шестерни через червячную шестерню 38. Тем не менее, может приспосабливаться конфигурация прямого привода, в которой исключается червячная шестерня 38. Таким образом, посредством исключения вала 18 первой шестерни или вала 36 второй шестерни, можно подавлять увеличение веса и сокращать число компонентов.
[0058] Настоящий вариант осуществления приспосабливает конфигурацию с двумя ведущими шестернями, в которой вал 16 зубчатой рейки соединяется с валом 18 первой шестерни через ведущую шестерню 17 и с валом 36 второй шестерни через ведущую шестерню 35. Тем не менее, настоящее раскрытие сущности не ограничено этим. Иными словами, требуется только обеспечение движущей силы для выходного поворотного механизма StOUT. Следовательно, может приспосабливаться конфигурация с одной ведущей шестерней, в которой исключаются ведущая шестерня 35 и вал 36 второй шестерни, и второй поворотный электромотор M2 соединяется с валом 18 первой шестерни через червячную шестерню 38. Таким образом, посредством исключения ведущей шестерни 35 или вала 36 второй шестерни, можно подавлять увеличение веса и сокращать число компонентов.
[0059] В настоящем варианте осуществления, первый поворотный электромотор M1 и второй поворотный электромотор M2 выполнены из электромоторов одного и того же типа. Тем не менее, настоящее раскрытие сущности не ограничено этим. Когда вызывается первичный отказ, например, первый поворотный электромотор M1 используется в EPS-режиме с использованием одного электромотора, тогда как второй поворотный электромотор M2 используется в SBW-режиме с использованием одного электромотора. Как описано выше, нагрузка на электромотор, используемый в SBW-режиме с использованием одного электромотора, превышает нагрузку на электромотор, используемый в EPS-режиме с использованием одного электромотора. Следовательно, второй поворотный электромотор M2 может быть выполнен из электромотора с более высоким уровнем мощности по сравнению с мощностью первого поворотного электромотора M1. Таким образом, когда SBW-режим с использованием одного электромотора выполняется вследствие неисправности, вызываемой в системе управления первым контроллером 71 поворота, можно формировать достаточную вращающую силу только посредством второго поворотного электромотора M2.
[0060] В настоящем варианте осуществления, когда неисправен первый контроллер 71 поворота в состоянии, в котором выполняется SBW-режим с использованием двух электромоторов, EPS-режим с использованием одного электромотора отменяется, и выполняется SBW-режим с использованием одного электромотора. Тем не менее, настоящее раскрытие сущности не ограничено этим. Иными словами, когда не неисправен датчик 34 крутящего момента, и можно передавать определенное значение датчика 34 крутящего момента из первого контроллера 71 поворота во второй контроллер 72 поворота через линию 74 связи, EPS-режим с использованием одного электромотора может выполняться посредством управления приведения в действие второго поворотного электромотора M2 с помощью второго контроллера 72 поворота. Таким образом, посредством выполнения EPS-режима с использованием одного электромотора посредством второго контроллера 72 поворота, который получает определенное значение датчика 34 крутящего момента, можно уменьшать нагрузку на второй поворотный электромотор M2 по сравнению со случаем при выполнении SBW-режима с использованием одного электромотора. Следовательно, можно достигать продления срока службы второго поворотного электромотора M2.
[0061] В вышеприведенном описании, рулевой вал 12 соответствует "входному валу", вал 18 первой шестерни соответствует "выходному валу", первый поворотный электромотор M1 соответствует "первому электромотору", и второй поворотный электромотор M2 соответствует "второму электромотору". Кроме того, первый контроллер 71 поворота соответствует "первому модулю управления", второй контроллер 72 поворота соответствует "второму модулю управления", датчик 34 крутящего момента соответствует "модулю определения крутящего момента", и контроллер 73 силы реакции соответствует "модулю управления силой реакции". Кроме того, SBW-режим с использованием двух электромоторов соответствует "управлению поворотом с использованием двух электромоторов", SBW-режим с использованием одного электромотора соответствует "управлению поворотом с использованием одного электромотора", и EPS-режим с использованием одного электромотора соответствует "управлению усилением с использованием одного электромотора".
[0062] Преимущества
Далее описываются преимущества основной части первого варианта осуществления.
(1) Устройство управления рулением согласно настоящему варианту осуществления включает в себя входной рулевой механизм StIN, в котором рулевой вал 12 вращается посредством операции руления водителем, и выходной поворотный механизм StOUT, выполненный с возможностью поворачивать колеса 13L и 13R посредством вращения вала 18 первой шестерни. Кроме того, устройство управления рулением включает в себя муфту 19, выполненную с возможностью соединять рулевой вал 12 и вал 18 первой шестерни таким образом, что они могут соединяться и разъединяться, первый поворотный электромотор M1, выполненный с возможностью обеспечения движущей силы для выходного поворотного механизма StOUT, и второй поворотный электромотор M2, выполненный с возможностью обеспечения движущей силы для выходного поворотного механизма StOUT. Кроме того, устройство управления рулением включает в себя первый контроллер 71 поворота, выполненный с возможностью управлять приведением в действие первого поворотного электромотора M1, второй контроллер 72 поворота, выполненный с возможностью управлять приведением в действие второго поворотного электромотора M2, и датчик 34 крутящего момента, выполненный с возможностью определять крутящий момент вала 18 первой шестерни. Затем SBW-режим с использованием двух электромоторов задается как осуществление управления углом поворота колес 13L и 13R посредством управления углом вращения первого поворотного электромотора M1 посредством первого контроллера 71 поворота и посредством управления углом вращения второго поворотного электромотора M2 посредством второго контроллера 72 поворота, в зависимости от угла поворота рулевого вала 12 в состоянии, в котором муфта 19 разъединена. Кроме того, SBW-режим с использованием одного электромотора задается как осуществление управления углом поворота колес 13L и 13R посредством управления углом вращения второго поворотного электромотора M2 посредством второго контроллера 72 поворота, в зависимости от угла поворота рулевого вала 12 в состоянии, в котором муфта 19 разъединена, и первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1. Кроме того, EPS-режим с использованием одного электромотора задается как осуществление управления усиливающим крутящим моментом для операции руления водителем посредством управления крутящим моментом первого поворотного электромотора M1 посредством первого контроллера 71 поворота в зависимости от крутящего момента, определенного посредством датчика 34 крутящего момента в состоянии, в котором муфта 19 соединена, и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2. Затем, когда неисправен, по меньшей мере, один из первого контроллера 71 поворота, первого поворотного электромотора M1 и датчика 34 крутящего момента в состоянии, в котором первый контроллер 71 поворота и второй контроллер 72 поворота выполняют SBW-режим с использованием двух электромоторов, второй контроллер 72 поворота выполняет SBW-режим с использованием одного электромотора. Кроме того, когда неисправен, по меньшей мере, один из второго контроллера 72 поворота и второго поворотного электромотора M2 в состоянии, в котором первый контроллер 71 поворота и второй контроллер 72 поворота выполняют SBW-режим с использованием двух электромоторов, первый контроллер 71 поворота выполняет EPS-режим с использованием одного электромотора.
Таким образом, посредством переключения управления в зависимости от точки возникновения неисправности при использовании системы управления, функционирующей нормально, можно осуществлять отказоустойчивый режим при полном использовании преимущества предоставления нескольких электромоторов.
[0063] (2) Устройство управления рулением согласно настоящему варианту осуществления включает в себя электромотор 51 для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении во входной рулевой механизм StIN, и контроллер 73 силы реакции, выполненный с возможностью управлять приведением в действие электромотора 51 для формирования силы реакции. Затем SBW-режим с использованием двух электромоторов задается как осуществление управления углом поворота колес 13L и 13R посредством управления углом вращения первого поворотного электромотора M1 посредством первого контроллера 71 поворота и посредством управления углом вращения второго поворотного электромотора M2 посредством второго контроллера 72 поворота, в зависимости от угла поворота рулевого вала 12 и управления силой реакции при рулении на операцию руления водителем посредством управления крутящим моментом электромотора 51 для формирования силы реакции посредством контроллера 73 силы реакции, в состоянии, в котором муфта 19 разъединена. Кроме того, SBW-режим с использованием одного электромотора задается как осуществление управления углом поворота колес 13L и 13R посредством управления углом вращения второго поворотного электромотора M2 посредством второго контроллера 72 поворота, в зависимости от угла поворота рулевого вала 12, и управления силой реакции при рулении на операцию руления водителем посредством управления крутящим моментом электромотора 51 для формирования силы реакции посредством контроллера 73 силы реакции в состоянии, в котором муфта 19 разъединена, и первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1. Кроме того, EPS-режим с использованием одного электромотора задается как осуществление управления усиливающим крутящим моментом для операции руления водителем посредством управления крутящим моментом первого поворотного электромотора M1 посредством первого контроллера 71 поворота в зависимости от крутящего момента, определенного посредством датчика 34 крутящего момента в состоянии, в котором муфта 19 соединена, и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2. Затем, когда неисправен, по меньшей мере, один из первого контроллера 71 поворота, первого поворотного электромотора M1 и датчика 34 крутящего момента в состоянии, в котором первый контроллер 71 поворота, второй контроллер 72 поворота и контроллер 73 силы реакции выполняют SBW-режим с использованием двух электромоторов, второй контроллер 72 поворота и контроллер 73 силы реакции выполняют SBW-режим с использованием одного электромотора. Кроме того, когда неисправен, по меньшей мере, один из второго контроллера 72 поворота и второго поворотного электромотора M2 или, по меньшей мере, один из контроллера 73 силы реакции и электромотора 51 для формирования силы реакции в состоянии, в котором первый контроллер 71 поворота, второй контроллер 72 поворота и контроллер 73 силы реакции выполняют SBW-режим с использованием двух электромоторов, первый контроллер 71 поворота выполняет EPS-режим с использованием одного электромотора.
Таким образом, посредством переключения управления в зависимости от точки возникновения неисправности при использовании системы управления, функционирующей нормально, можно осуществлять отказоустойчивый режим при полном использовании преимущества предоставления нескольких электромоторов.
[0064] (3) В устройстве управления рулением согласно настоящему варианту осуществления SBW-режим с использованием одного электромотора приостанавливается в состоянии, в котором муфта 19 соединена, когда неисправен, по меньшей мере, один из второго контроллера 72 поворота и второго поворотного электромотора M2 или, по меньшей мере, один из контроллера 73 силы реакции и электромотора 51 для формирования силы реакции в состоянии, в котором выполняется SBW-режим с использованием одного электромотора.
Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления.
[0065] (4) В устройстве управления рулением согласно настоящему варианту осуществления EPS-режим с использованием одного электромотора приостанавливается в состоянии, в котором муфта 19 соединена, когда неисправен, по меньшей мере, один из первого контроллера 71 поворота, первого поворотного электромотора M1 и датчика 34 крутящего момента в состоянии, в котором выполняется EPS-режим с использованием одного электромотора.
Таким образом, система рулевого управления соединяется механически, чтобы обеспечивать функциональность прямого руления.
(5) В устройстве управления рулением согласно настоящему варианту осуществления, по меньшей мере, первый поворотный электромотор M1 и датчик 34 крутящего момента сконфигурированы как интегрированный составной компонент и используются совместно в качестве компонентов устройства электрического усилителя рулевого управления.
Таким образом, можно совместно использовать существующие компоненты устройства электрического усилителя рулевого управления, например, и можно подавлять увеличение стоимости.
[0066] (6) Устройство управления рулением согласно настоящему варианту осуществления, первый поворотный электромотор M1 и второй поворотный электромотор M2 выполнены из электромоторов одного и того же типа.
Таким образом, можно унифицировать электромоторы для того, чтобы подавлять увеличение стоимости.
(7) Устройство управления рулением согласно настоящему варианту осуществления, второй поворотный электромотор M2 выполнен из электромотора с более высоким уровнем мощности по сравнению с мощностью первого поворотного электромотора M1.
Таким образом, когда выполняется SBW-режим с использованием одного электромотора, можно формировать достаточную вращающую силу только посредством второго поворотного электромотора M2.
[0067] (8) Способ управления рулением согласно настоящему варианту осуществления включает в себя соединение рулевого вала 12 и вала 18 первой шестерни посредством муфты 19 таким образом, что рулевой вал 12 и вал 18 первой шестерни могут соединяться и разъединяться, причем муфта 19 предоставляется между входным рулевым механизмом StIN, в котором рулевой вал 12 вращается посредством операции руления водителем, и выходным поворотным механизмом StOUT, выполненным с возможностью поворачивать колеса 13L и 13R посредством вращения вала 18 первой шестерни. Кроме того, способ управления рулением включает в себя обеспечение движущей силы для выходного поворотного механизма StOUT посредством первого поворотного электромотора M1 и второго поворотного электромотора M2, управление приведением в действие первого поворотного электромотора M1 посредством первого контроллера 71 поворота, управление приведением в действие второго поворотного электромотора M2 посредством второго контроллера 72 поворота и определение крутящего момента вала 18 первой шестерни посредством датчика 34 крутящего момента. Затем SBW-режим с использованием двух электромоторов задается как осуществление управления углом поворота колес 13L и 13R посредством управления углом вращения первого поворотного электромотора M1 посредством первого контроллера 71 поворота и посредством управления углом вращения второго поворотного электромотора M2 посредством второго контроллера 72 поворота, в зависимости от угла поворота рулевого вала 12 в состоянии, в котором муфта 19 разъединена. Кроме того, SBW-режим с использованием одного электромотора задается как осуществление управления углом поворота колес 13L и 13R посредством управления углом вращения второго поворотного электромотора M2 посредством второго контроллера 72 поворота, в зависимости от угла поворота рулевого вала 12 в состоянии, в котором муфта 19 разъединена, и первый контроллер 71 поворота не управляет приведением в действие первого поворотного электромотора M1. Кроме того, EPS-режим с использованием одного электромотора задается как осуществление управления усиливающим крутящим моментом для операции руления водителем посредством управления крутящим моментом первого поворотного электромотора M1 посредством первого контроллера 71 поворота в зависимости от крутящего момента, определенного посредством датчика 34 крутящего момента в состоянии, в котором муфта 19 соединена, и второй контроллер 72 поворота не управляет приведением в действие второго поворотного электромотора M2. Затем SBW-режим с использованием одного электромотора выполняется посредством второго контроллера 72 поворота, когда неисправен, по меньшей мере, один из первого контроллера 71 поворота, первого поворотного электромотора M1 и датчика 34 крутящего момента в состоянии, в котором первый контроллер 71 поворота и второй контроллер 72 поворота выполняют SBW-режим с использованием двух электромоторов. Кроме того, EPS-режим с использованием одного электромотора выполняется посредством первого контроллера 71 поворота, когда неисправен, по меньшей мере, один из второго контроллера 72 поворота и второго поворотного электромотора M2 в состоянии, в котором первый контроллер 71 поворота и второй контроллер 72 поворота выполняют SBW-режим с использованием двух электромоторов.
Таким образом, посредством переключения управления в зависимости от точки возникновения неисправности при использовании системы управления, функционирующей нормально, можно осуществлять отказоустойчивый режим при полном использовании преимущества предоставления нескольких электромоторов.
[0068] Данная заявка притязает на приоритет японской патентной заявки номер 2012-221308 (зарегистрирована 3 октября 2012 года), содержимое которой полностью содержится в данном документе по ссылке.
Хотя настоящее изобретение описано в отношении точного числа вариантов осуществления, объем настоящего изобретения не ограничен этим, и модификации вариантов осуществления на основе вышеописанного раскрытия сущности являются очевидными для специалистов в данной области техники.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0069] 11 - руль
12 - рулевой вал
13L, 13R - колесо
14 - рычаг поворотного кулака
15 - поперечная рулевая тяга
16 - вал зубчатой рейки
17 - ведущая шестерня
18 - вал первой шестерни
19 - муфта
StIN - входной рулевой механизм
StOUT - выходной поворотный механизм
31 - шестерня зубчатой рейки
32 - червячная шестерня
M1 - первый поворотный электромотор
33 - круговой датчик положения
34 -датчик крутящего момента
A1 - первый актуатор
35 - ведущая шестерня
36 - вал второй шестерни
37 - шестерня зубчатой рейки
38 - червячная шестерня
M2 - второй поворотный электромотор
39 - круговой датчик положения
A2 - второй актуатор
51 - электромотор для формирования силы реакции
52 - круговой датчик позиции
53 - датчик угла поворота при рулении
71 - первый контроллер поворота
72 - второй контроллер поворота
73 - контроллер силы реакции
74 - линия связи
75 - линия связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2633023C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ И СПОСОБ РУЛЕВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2632543C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2571679C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
Группа изобретений устройства и способа управления рулением. Устройство управления рулением содержит второй контроллер 72, который выполняет SBW-режим с использованием одного электромотора, когда неисправен, по меньшей мере, один из первого контроллера 71 поворота, первого поворотного электромотора M1 и датчика 34 крутящего момента в состоянии, в котором первый контроллер 71 поворота и второй контроллер 72 поворота выполняют SBW-режим с использованием двух электромоторов. Первый контроллер 71 выполняет EPS-режим с использованием одного электромотора, когда неисправен, по меньшей мере, один из второго контроллера 72 поворота и второго поворотного электромотора M2 в состоянии, в котором первый контроллер 71 поворота и второй контроллер 72 поворота выполняют SBW-режим с использованием двух электромоторов. Осуществляется отказоустойчивый режим при полном использовании преимущества предоставления нескольких электромоторов. 2 н. и 6 з.п. ф-лы, 3 ил.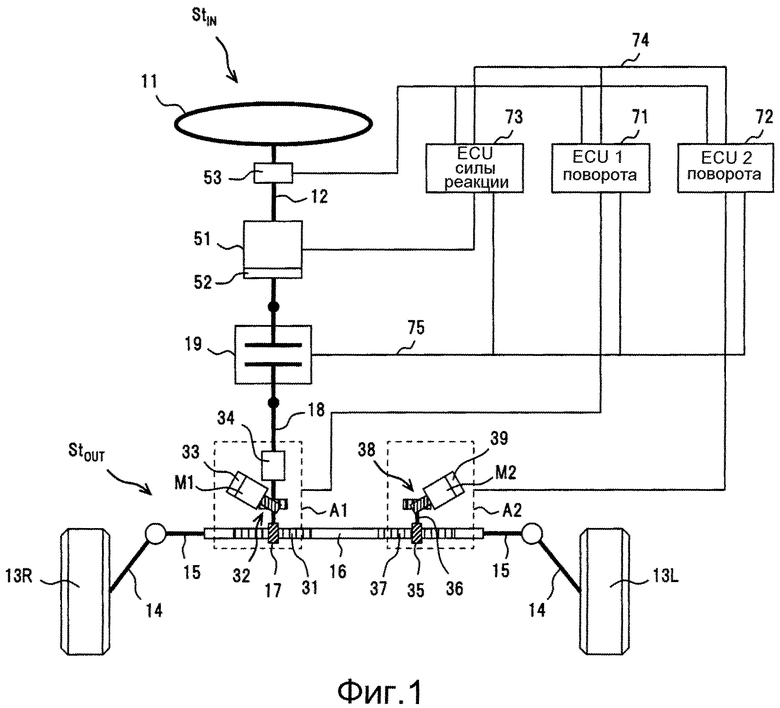
1. Устройство управления рулением, содержащее:
входной рулевой механизм, в котором входной вал вращается посредством операции руления водителем;
выходной поворотный механизм, выполненный с возможностью вращать колесо посредством вращения выходного вала;
муфту, выполненную с возможностью соединять входной вал и выходной вал таким образом, что входной вал и выходной вал способны соединяться и разъединяться;
первый электромотор, выполненный с возможностью обеспечения движущей силы для выходного поворотного механизма;
второй электромотор, выполненный с возможностью обеспечения движущей силы для выходного поворотного механизма;
первый модуль управления, выполненный с возможностью управлять приведением в действие первого электромотора;
второй модуль управления, выполненный с возможностью управлять приведением в действие второго электромотора; и
модуль определения крутящего момента, выполненный с возможностью определять крутящий момент выходного вала, при этом:
по меньшей мере, первый электромотор и модуль определения крутящего момента сконфигурированы как интегрированный составной компонент,
второй модуль управления выполнен с возможностью осуществлять режим управления поворотом с использованием одного электромотора, когда неисправен, по меньшей мере, один из первого модуля управления, первого электромотора и модуля определения крутящего момента, в состоянии, в котором первый модуль управления и второй модуль управления выполняют режим управления поворотом с использованием двух электромоторов, и
первый модуль управления выполнен с возможностью осуществлять режим управления усилением с использованием одного электромотора даже в состоянии, в котором режим управления поворотом с использованием одного электромотора может выполняться, когда неисправен, по меньшей мере, один из второго модуля управления и второго электромотора в состоянии, в котором первый модуль управления и второй модуль управления выполняют режим управления поворотом с использованием двух электромоторов, и при этом:
муфта разъединена, и углы поворота первого электромотора и второго электромотора управляются посредством первого модуля управления и второго модуля управления в зависимости от угла поворота входного вала в режиме управления поворотом с использованием двух электромоторов,
муфта соединена, и крутящий момент первого электромотора управляется посредством первого модуля управления в зависимости от крутящего момента, определенного посредством модуля определения крутящего момента в режиме управления усилением с использованием одного электромотора, и
муфта разъединена, и угол поворота второго электромотора управляется посредством второго модуля управления в зависимости от угла поворота входного вала в режиме управления поворотом с использованием одного электромотора.
2. Устройство управления рулением по п.1, дополнительно содержащее:
электромотор для формирования силы реакции, выполненный с возможностью обеспечения силы реакции при рулении во входной рулевой механизм; и
модуль управления силой реакции, выполненный с возможностью управлять приведением в действие электромотора для формирования силы реакции, при этом:
второй модуль управления и модуль управления силой реакции выполнены с возможностью осуществлять режим управления поворотом с использованием одного электромотора, когда неисправен, по меньшей мере, один из первого модуля управления, первого электромотора и модуля определения крутящего момента, в состоянии, в котором первый модуль управления, второй модуль управления и модуль управления силой реакции выполняют режим управления поворотом с использованием двух электромоторов, и
первый модуль управления выполнен с возможностью осуществлять режим управления усилением с использованием одного электромотора даже в состоянии, в котором режим управления поворотом с использованием одного электромотора может выполняться, когда неисправен, по меньшей мере, один из второго модуля управления и второго электромотора или, по меньшей мере, один из модуля управления силой реакции и электромотора для формирования силы реакции в состоянии, в котором первый модуль управления, второй модуль управления и модуль управления силой реакции выполняют режим управления поворотом с использованием двух электромоторов, и при этом:
муфта разъединена, углы поворота первого электромотора и второго электромотора управляются посредством первого модуля управления и второго модуля управления в зависимости от угла поворота входного вала, и крутящий момент электромотора для формирования силы реакции управляется посредством модуля управления силой реакции в режиме управления поворотом с использованием двух электромоторов,
муфта соединена, и крутящий момент первого электромотора управляется посредством первого модуля управления в зависимости от крутящего момента, определенного посредством модуля определения крутящего момента в режиме управления усилением с использованием одного электромотора, и
муфта разъединена, угол поворота второго электромотора управляется посредством второго модуля управления в зависимости от угла поворота входного вала, и крутящий момент электромотора для формирования силы реакции управляется посредством модуля управления силой реакции в режиме управления поворотом с использованием одного электромотора.
3. Устройство управления рулением по п.2, выполненное с возможностью приостанавливать режим управления поворотом с использованием одного электромотора в состоянии, в котором муфта соединена, когда неисправен, по меньшей мере, один из второго модуля управления и второго электромотора или, по меньшей мере, один из модуля управления силой реакции и электромотора для формирования силы реакции в состоянии, в котором выполняется режим управления поворотом с использованием одного электромотора.
4. Устройство управления рулением по п.1, выполненное с возможностью приостанавливать режим управления усилением с использованием одного электромотора в состоянии, в котором муфта соединена, когда неисправен, по меньшей мере, один из первого модуля управления, первого электромотора и модуля определения крутящего момента в состоянии, в котором выполняется режим управления усилением с использованием одного электромотора.
5. Устройство управления рулением по п.1, в котором, по меньшей мере, первый электромотор и модуль определения крутящего момента используются совместно в качестве компонентов устройства электрического усилителя рулевого управления.
6. Устройство управления рулением по п.1, в котором первый электромотор и второй электромотор выполнены из электромоторов одного и того же типа.
7. Устройство управления рулением по п.1, в котором второй электромотор выполнен из электромотора с более высоким уровнем мощности по сравнению с мощностью первого электромотора.
8. Способ управления рулением, содержащий этапы, на которых:
соединяют входной вал и выходной вал посредством муфты, обеспеченной между входным рулевым механизмом, в котором входной вал вращается посредством операции руления водителем, и выходным поворотным механизмом, выполненным с возможностью поворачивать колесо посредством вращения выходного вала таким образом, что входной вал и выходной вал способны соединяться и разъединяться;
обеспечивают движущую силу для выходного поворотного механизма посредством первого электромотора и второго электромотора;
управляют приведением в действие первого электромотора посредством первого модуля управления;
управляют приведением в действие второго электромотора посредством второго модуля управления;
определяют крутящий момент выходного вала посредством модуля определения крутящего момента;
выполняют режим управления поворотом с использованием одного электромотора посредством второго модуля управления, когда неисправен, по меньшей мере, один из первого модуля управления, первого электромотора и модуля определения крутящего момента, в состоянии, в котором первый модуль управления и второй модуль управления выполняют режим управления поворотом с использованием двух электромоторов; и
выполняют режим управления усилением с использованием одного электромотора посредством первого модуля управления даже в состоянии, в котором режим управления поворотом с использованием одного электромотора может выполняться, когда неисправен, по меньшей мере, один из второго модуля управления и второго электромотора, в состоянии, в котором первый модуль управления и второй модуль управления выполняют режим управления поворотом с использованием двух электромоторов, при этом:
по меньшей мере, первый электромотор и модуль определения крутящего момента сконфигурированы как интегрированный составной компонент,
муфта разъединена, и углы поворота первого электромотора и второго электромотора управляются посредством первого модуля управления и второго модуля управления в зависимости от угла поворота входного вала в режиме управления поворотом с использованием двух электромоторов,
муфта соединена, и крутящий момент первого электромотора управляется посредством первого модуля управления в зависимости от крутящего момента, определенного посредством модуля определения крутящего момента в режиме управления усилением с использованием одного электромотора, и
муфта разъединена, и угол поворота второго электромотора управляется посредством второго модуля управления в зависимости от угла поворота входного вала в режиме управления поворотом с использованием одного электромотора.
| JP 2004345412 A, 09.12.2004 | |||
| JP 2010137745 A, 24.06.2010 | |||
| JP 2009262609 A, 12.11.2009 | |||
| JP 2007069848 A, 22.03.2007 | |||
| EP 1205371 A2, 15.05.2002. |

