Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к устройству управления рулением транспортного средства посредством использования системы рулевого управления по проводам, в которой функциональный модуль, который должен управляться водителем, и поворотный модуль, выполненный с возможностью поворачивать поворотные колеса, механически отделены друг от друга, и к способу управления рулением транспортного средства.
Уровень техники
[0002] В одной технологии предусмотрено устройство управления рулением, которое управляет приведением в действие поворотного электромотора, чтобы поворачивать поворотные колеса до угла (целевого угла поворота) в зависимости от операции рулевого колеса, в состоянии, в котором тракт передачи крутящего момента между рулевым колесом и поворотными колесами механически разъединен.
Такое устройство управления рулением, в общем, представляет собой устройство, конфигурирующее систему, называемую рулевым управлением по проводам (SBW) (SBW-системы), PLT 1 приводится в качестве примера. В SBW-системе, целевые углы поворота передних колес вычисляются на основе угла поворота руля при рулении, чтобы управлять поворотным электромотором, и помимо этого, электромотор для формирования силы реакции управляется на основе целевых углов поворота, которые вычислены.
Список библиографических ссылок
Патентные документы
[0003] PLT 1. JP 2011-5933 A
Сущность изобретения
Техническая задача
[0004] В технологии, раскрытой в PLT 1, для того чтобы реализовывать целевой отклик при операции увеличения руления, когда фаза угла поворота относительно угла поворота при рулении сдвинута к фазе опережения, некомфортное ощущение вызывается у водителя при операции возвратного руления посредством чрезмерного эффекта опережения по фазе.
Таким образом, цель настоящего раскрытия сущности заключается в том, чтобы предоставлять устройство управления рулением транспортного средства и способ управления рулением транспортного средства, за счет которых может достигаться идеальное ощущение при рулевом управлении.
Решение задачи
[0005] Чтобы разрешать вышеописанную проблему, в одном варианте осуществления настоящего раскрытия сущности, в случае, если обнаруживается операция возвратного руления с помощью руля, приводимого в действие водителем, рабочие характеристики по отклику вывода при поворачивании относительно ввода руления заданы ниже рабочих характеристик по отклику в случае, если обнаруживается операция возвратного руления с помощью рулевого колеса, приводимого в действие водителем.
Преимущества изобретения
[0006] В некоторых вариантах осуществления настоящего раскрытия сущности, при управлении поворотом, отклик при поворачивании при операции возвратного руления может задерживаться по сравнению с откликом при поворачивании при операции увеличения руления. Таким образом, можно достигать идеального ощущения при рулении, так что отклик не задерживается при операции увеличения руления и рулевое колесо естественно возвращается при операции возвратного руления.
Краткое описание чертежей
[0007] Фиг. 1 является видом, иллюстрирующим общую конфигурацию транспортного средства, включающего в себя устройство рулевого управления транспортного средства в одном варианте осуществления настоящего раскрытия сущности;
Фиг. 2 является блок-схемой управления, иллюстрирующей управление поворотом и управление силой реакции;
Фиг. 3 является примером карты дифференциального руления;
Фиг. 4 является видом, иллюстрирующим работу в одном варианте осуществления настоящего раскрытия сущности; и
Фиг. 5 является блок-схемой управления, иллюстрирующей другой пример управления поворотом.
Подробное описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего раскрытия сущности со ссылками на прилагаемые чертежи.
Первый вариант осуществления
Конфигурация
Фиг. 1 является видом, иллюстрирующим общую конфигурацию транспортного средства, включающего в себя устройство рулевого управления транспортного средства в одном варианте осуществления настоящего раскрытия сущности. Устройство рулевого управления транспортного средства представляет собой так называемую систему рулевого управления по проводам (SBW), в которой рулевое колесо 1 и механизм 3 рулевого управления, выполненные с возможностью поворачивать передние колеса 2 (поворотные колеса), механически отделены друг от друга.
Это транспортное средство включает в себя электромотор 5 для формирования силы реакции. Электромотор 5 для формирования силы реакции содержит вал 4 рулевой колонки, выполненный с возможностью поддерживать рулевое колесо 1. Помимо этого, транспортное средство включает в себя датчик 6 угла поворота, датчик 7 крутящего момента поворота при рулении и датчик 8 угла электромотора для формирования силы реакции. Датчик 6 угла поворота выполнен с возможностью обнаруживать угол поворота вала 4 рулевой колонки. Датчик 7 крутящего момента поворота при рулении выполнен с возможностью обнаруживать крутящий момент поворота при рулении из угла скручивания вала 4 рулевой колонки. Датчик 8 угла электромотора для формирования силы реакции выполнен с возможностью обнаруживать угол электромотора 5 для формирования силы реакции.
[0009] Дополнительно, транспортное средство включает в себя первый и второй поворотные электромоторы 9a и 9b. Первый и второй поворотные электромоторы 9a и 9b размещаются в механизме 3 рулевого управления и прикладывают крутящие моменты рулевого управления к ведущим шестерням 13a и 13b соответственно, чтобы поворачивать передние колеса 2.
Кроме того, транспортное средство включает в себя датчики 10a и 10b угла первого и второго поворотного электромотора и первый и второй датчики 12a и 12b поперечной силы на шинах. Датчики 10a и 10b угла первого и второго поворотного электромотора выполнены с возможностью обнаруживать углы поворота поворотных электромоторов 9a и 9b, соответственно, в качестве углов поворота, которые представляют собой углы поворота относительно прямого состояния движения передних колес 2. Первый и второй датчики 12a и 12b поперечной силы на шинах выполнены с возможностью обнаруживать силы, которые должны вводиться в осевом направлении зубчатой рейки 11, соответственно, из передних колес 2, в качестве поперечных сил передних колес 2. Следует отметить, что первый поворотный электромотор 9a механически зацепляется через ведущую шестерню 13a и зубчатую рейку 11 с передним колесом 2, тогда как второй поворотный электромотор 9b механически зацепляется через ведущую шестерню 13b и зубчатую рейку 11 с передним колесом 2. Следовательно, углы поворота передних колес 2 могут обнаруживаться посредством обнаружения углов поворота первого и второго поворотных электромоторов 9a и 9b.
[0010] Первый, второй и третий контроллеры 14, 15 и 16 выполнены с возможностью управлять электромотором 5 для формирования силы реакции и первым и вторым поворотными электромоторами 9a и 9b.
Второй контроллер 15 выполнен с возможностью принимать вводы угла поворота вала рулевой колонки из датчика 6 угла поворота, крутящего момента поворота при рулении из датчика 7 крутящего момента поворота при рулении, угла электромотора для формирования силы реакции из датчика 8 угла электромотора для формирования силы реакции и поперечных сил на шинах из первого и второго датчиков 12a и 12b поперечной силы на шинах. Помимо этого, второй контроллер 15 выполнен с возможностью принимать ввод информации касательно транспортного средства, такой как скорость вращения колес, через линию CAN-связи (не проиллюстрирована).
[0011] Затем второй контроллер 15 выполнен с возможностью формировать целевые углы поворота передних колес 2 на основе угла электромотора для формирования силы реакции из датчика 8 угла электромотора для формирования силы реакции и скорости транспортного средства из линии CAN-связи и отправлять их в первый и третий контроллеры 14 и 16. Первый контроллер 14 выполнен с возможностью выводить в первый поворотный электромотор 9a управляющий электрический ток, выполненный с возможностью исключать отклонение между целевым углом поворота, который введен из второго контроллера 15, и фактическим углом поворота переднего колеса 2, который обнаружен посредством датчика 10a угла поворота первого поворотного электромотора, и управлять углом поворота. Третий контроллер 16 выполнен с возможностью выводить во второй поворотный электромотор 9b управляющий электрический ток, выполненный с возможностью исключать отклонение между целевым углом поворота, который введен из второго контроллера 15, и фактическим углом поворота переднего колеса 2, который обнаружен посредством датчика 10b угла поворота второго поворотного электромотора, и управлять углом поворота.
[0012] Дополнительно, второй контроллер 15 выполнен с возможностью формировать целевую силу реакции при рулении, которая должна прикладываться к рулевому колесу 1, на основе угла электромотора для формирования силы реакции из датчика 8 угла электромотора для формирования силы реакции, поперечных сил на шинах из первого и второго датчиков 12a и 12b поперечной силы на шинах, значений электрического тока первого и второго поворотных электромоторов 9a и 9b и скорости транспортного средства через линию CAN-связи. Затем второй контроллер 15 выполнен с возможностью выводить в электромотор 5 для формирования силы реакции управляющий электрический ток, выполненный с возможностью исключать отклонение между целевым электрическим током на основе целевой силы реакции при рулении, которая сформирована, и фактическим электрическим током, который обнаружен посредством датчика электрического тока (не проиллюстрирован), который обнаруживает электрический ток, который подается в электромотор 5 для формирования силы реакции, и управлять силой реакции при рулении.
[0013] Первый, второй и третий контроллеры 14, 15 и 16 выполнены с возможностью подавать питание из аккумулятора 17. Помимо этого, первый, второй и третий контроллеры 14, 15 и 16 выполнены с возможностью совместно использовать свою входную и выходную информацию через линии 18 связи. Даже если второй контроллер 15 выходит из строя, один из оставшихся первого и третьего контроллеров 14 и 16 выполнен с возможностью формировать целевой угол поворота и целевую силу реакции при рулении, так что первый и третий контроллеры 14 и 16 могут непрерывно управлять первым и вторым поворотными электромоторами 9a и 9b и электромотором 5 для формирования силы реакции.
[0014] Второй контроллер 15 выполнен с возможностью механически соединять вал 4 рулевой колонки и вал 13 шестерни с резервной муфтой, например, когда оба из первого и второго поворотных электромоторов 9a и 9b выходят из строя или когда электромотор 5 для формирования силы реакции выходит из строя. Соответственно, обеспечивается возможностью ручного рулении водителем.
Следует отметить, что второй контроллер 15 выполнен с возможностью задавать угол поворота вала 4 рулевой колонки в нейтральную позицию (позицию, соответствующую нулевому углу поворота) на основе угла поворота вала рулевой колонки, обнаруженного посредством датчика 6 угла поворота во время включения зажигания.
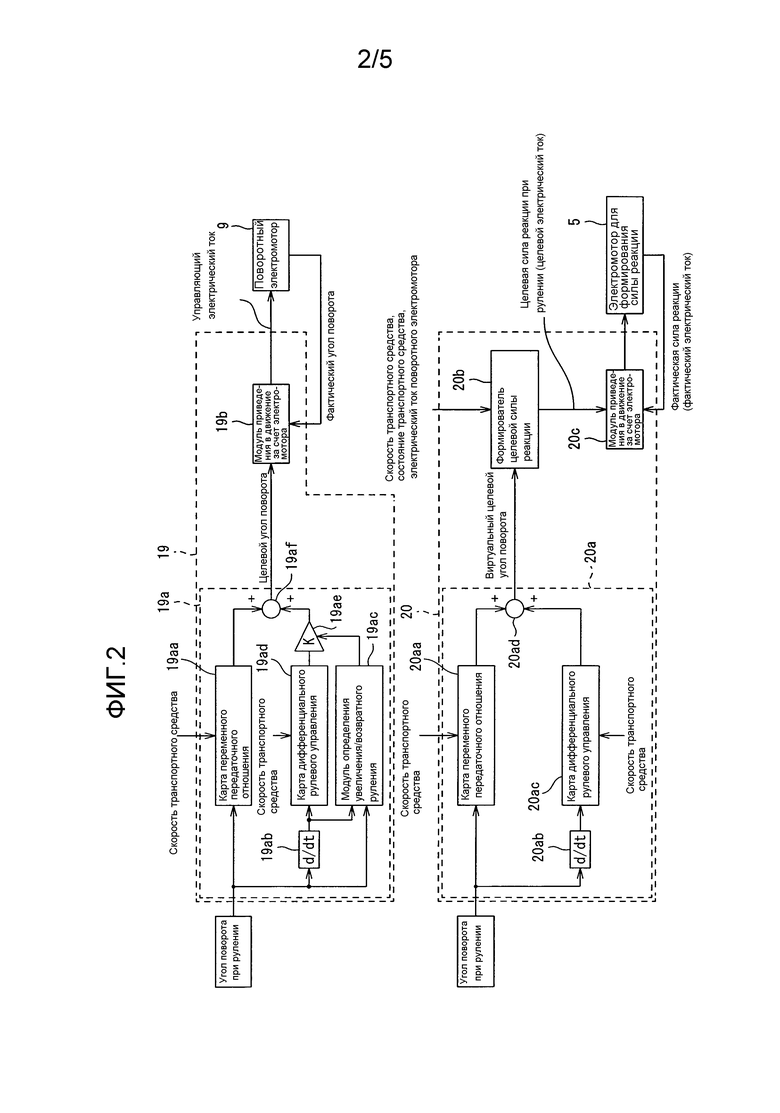
[0015] Фиг. 2 является блок-схемой управления, иллюстрирующей управление поворотом в одном варианте осуществления настоящего раскрытия сущности.
В дальнейшем в этом документе, чтобы упрощать описание, первый и второй поворотные электромоторы 9a и 9b упоминаются в качестве поворотного электромотора 9, датчики 10a и 10b угла поворота первого и второго поворотного электромотора упоминаются в качестве датчика 10 угла поворота поворотного электромотора, и первый, второй и третий контроллеры 14, 15 и 16 упоминаются в качестве контроллера 15, за исключением случаев, в которых соответствующие компоненты должны описываться по отдельности.
Контроллер 15 включает в себя контроллер 19 поворота и контроллер 20 силы реакции при рулении.
Контроллер 19 поворота включает в себя формирователь 19a целевого угла поворота и модуль 19b приведения в движение за счет электромотора.
Формирователь 19a целевого угла поворота включает в себя модуль 19aa вычисления величины установившегося управления рулением, модуль 19ab вычисления угловой скорости руления, модуль 19ac определения увеличения/возвратного руления, модуль 19ad вычисления величины дифференциального управления рулением, модуль 19ae умножения усиления и модуль 19af сложения.
[0016] Модуль 19aa вычисления величины установившегося управления рулением выполнен с возможностью вычислять величину установившегося управления рулением, которая является величиной управления, зависящей от угла поворота при рулении. Величина установившегося управления рулением вычисляется посредством обращения к карте переменного передаточного отношения на основе угла поворота при рулении, который является входным углом для рулевого колеса 1, приводимого в действие водителем, и скорости транспортного средства.
Угол рулевого управления оценивается из угла электромотора для формирования силы реакции и угла скручивания торсионного вала, размещаемого в датчике 7 крутящего момента поворота при рулении. Угол скручивания торсионного вала может вычисляться из характеристики скручивания торсионного вала, посредством использования следующего выражения отношения:
Угол скручивания торсионного вала = крутящий момент поворота при рулении/жесткость пружины датчика крутящего момента.
В данном документе, крутящий момент поворота при рулении представляет собой крутящий момент, обнаруженный посредством датчика 7 крутящего момента поворота при рулении. Помимо этого, жесткость пружины датчика крутящего момента является характеристическим значением торсионного вала и выясняется заранее посредством экспериментов.
Следовательно, угол поворота при рулении может получаться следующим образом:
Угол поворота при рулении = угол скручивания торсионного вала + угол электромотора для формирования силы реакции
Следует отметить, что угол поворота при рулении может обнаруживаться посредством использования угла поворота рулевого колеса 1, который обнаружен посредством датчика 6 угла поворота.
[0017] На карте переменного передаточного отношения величина установившегося управления рулением задается из взаимосвязи между углом поворота при рулении и углом поворота на основе передаточного отношения рулевого управления (отношения угла поворота при рулении к углу поворота). Передаточное отношение рулевого управления изменяется в зависимости от скорости транспортного средства. Например, передаточное отношение рулевого управления является небольшим в области низких скоростей транспортного средства (отношение угла поворота при рулении к углу поворота задается небольшим), с тем чтобы улучшать поворачиваемость, тогда как передаточное отношение рулевого управления является большим в области высоких скоростей транспортного средства (отношение угла поворота при рулении к углу поворота задается большим), с тем чтобы улучшать устойчивость при движении. Другими словами, передаточное отношение рулевого управления в зависимости от скорости транспортного средства задается на основе карты переменного передаточного отношения, так что угол поворота задается на основе передаточного отношения, которое задано, и угла поворота при рулении.
[0018] Модуль 19ab вычисления угловой скорости руления выполнен с возможностью дифференцировать угол поворота при рулении, чтобы вычислять угловую скорость руления.
Модуль 19ac определения увеличения/возвратного руления выполнен с возможностью определять то, что водитель все больше поворачивает рулевое колесо 1 или возвращает рулевое колесо 1, на основе угла поворота при рулении и угловой скорости руления. В данном документе, когда знак угла поворота при рулении и знак угловой скорости руления являются идентичными между собой, модуль 19ac определения увеличения/возвратного руления выполнен с возможностью определять то, что водитель все больше поворачивает рулевое колесо 1. Когда знак угла поворота при рулении и знак угловой скорости руления отличаются друг от друга, модуль 19ac определения увеличения/возвратного руления выполнен с возможностью определять то, что водитель возвращает рулевое колесо 1.
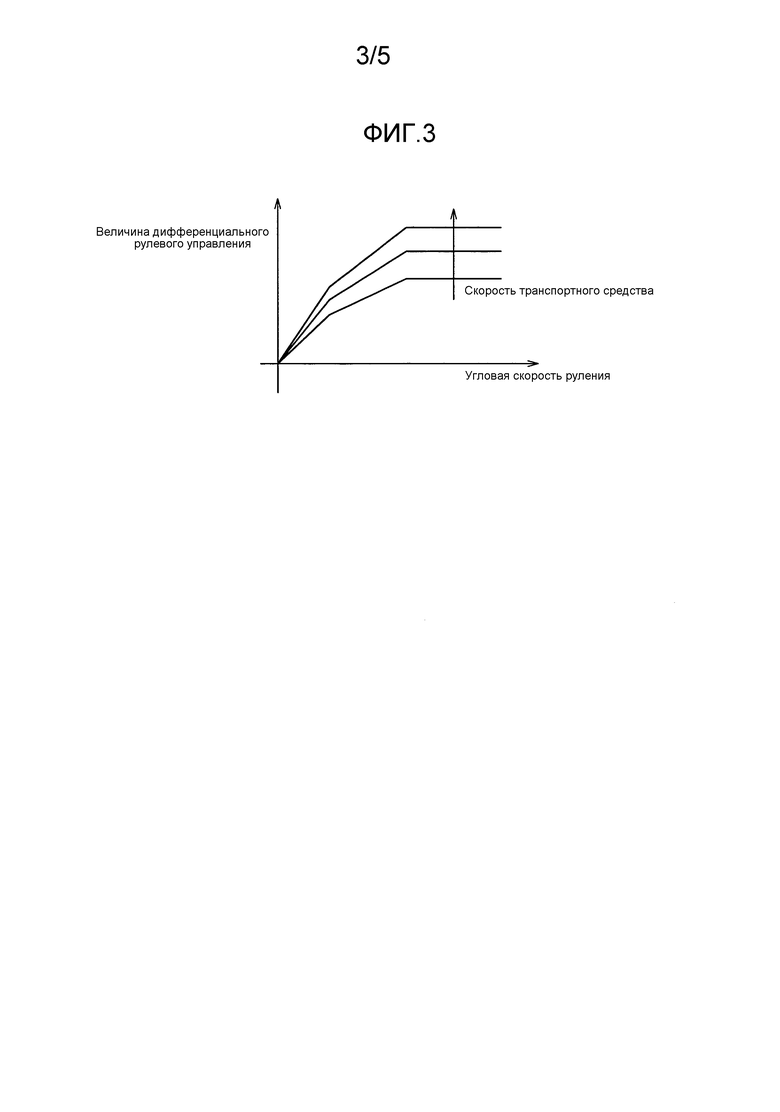
[0019] Модуль 19ad вычисления величины дифференциального рулевого управления выполнен с возможностью вычислять величину дифференциального рулевого управления (опорное значение), которая является величиной управления, зависящей от угловой скорости руления, вычисленной посредством модуля 19ab вычисления угловой скорости руления. Величина дифференциального рулевого управления вычисляется посредством обращения к карте дифференциального рулевого управления на основе угловой скорости руления.
Фиг. 3 является примером карты дифференциального рулевого управления. Величина дифференциального рулевого управления при управлении поворотом задается в качестве значения, полученного посредством умножения угловой скорости руления на предварительно заданное дифференциальное усиление K1. Здесь, в диапазоне, в котором угловая скорость руления является небольшой, дифференциальное усиление K1 задается большим дифференциального усиления K1 в диапазоне, в котором угловая скорость руления является большой. Помимо этого, дифференциальное усиление K1 задается большим по мере того, как становится выше скорость транспортного средства. Дополнительно, величина дифференциального рулевого управления задается с возможностью иметь верхний предел с определенным предельным значением.
[0020] Модуль 19ae умножения усиления выполнен с возможностью задавать корректирующее усиление K согласно результату определения модуля 19ac определения увеличения/возвратного руления и умножать корректирующее усиление K на величину дифференциального рулевого управления (опорное значение), вычисленную посредством модуля 19ad вычисления величины дифференциального рулевого управления. Корректирующее усиление K задается таким образом, что оно удовлетворяет K=1, когда модуль 19ac определения увеличения/возвратного руления определяет то, что водитель все больше поворачивает рулевое колесо 1. С другой стороны, корректирующее усиление K задается как предварительно заданное значение, удовлетворяющее K<1 (например, 0,4), когда модуль 19ac определения увеличения/возвратного руления определяет то, что водитель возвращает рулевое колесо 1.
Модуль 19af сложения выполнен с возможностью суммировать величину установившегося управления рулением, вычисленную посредством модуля 19aa вычисления величины установившегося управления рулением, и скорректированную величину дифференциального рулевого управления, которая вычислена посредством модуля 19ae умножения усиления, и формировать целевой угол поворота.
[0021] Кроме того, модуль 19b приведения в движение за счет электромотора выполнен с возможностью подавать в поворотный электромотор 9 управляющий электрический ток, посредством которого целевой угол поворота, сформированный посредством целевого генератора угла поворота 19a, и фактический угол поворота (фактический угол поворота) совпадают между собой (другими словами, управляющий электрический ток в зависимости от отклонения между целевым углом поворота и фактическим углом поворота).
Контроллер 20 силы реакции при рулении включает в себя формирователь 20a виртуального целевого угла поворота, формирователь 20b целевой силы реакции и модуль 20c приведения в движение за счет электромотора.
Формирователь 20a виртуального целевого угла поворота включает в себя модуль 20aa вычисления величины установившегося управления рулением, модуль 20ab вычисления угловой скорости руления, модуль 20ac вычисления величины дифференциального рулевого управления и модуль 20ad сложения.
Модуль 20aa вычисления величины установившегося управления рулением выполнен с возможностью вычислять величину установившегося управления рулением, которая является величиной управления, зависящей от угла поворота при рулении. Модуль 20aa вычисления величины установившегося управления рулением выполнен с возможностью вычислять величину установившегося управления рулением посредством обращения к карте переменного передаточного отношения на основе угла поворота при рулении, который является входным углом для рулевого колеса 1, приводимого в действие водителем, и скорости транспортного средства. Карта переменного передаточного отношения является идентичной карте переменного передаточного отношения, используемой посредством модуля 19aa вычисления величины установившегося управления рулением контроллера 19 поворота. Помимо этого, угол поворота при рулении вычисляется или обнаруживается способом, идентичным способу, используемому посредством модуля 19aa вычисления величины установившегося управления рулением контроллера 19 поворота.
[0022] Модуль 20ab вычисления угловой скорости руления выполнен с возможностью дифференцировать угол поворота при рулении и вычислять угловую скорость руления.
Модуль 20ac вычисления величины дифференциального рулевого управления выполнен с возможностью управлять величиной дифференциального рулевого управления, которая является величиной управления в зависимости от угловой скорости руления, вычисленной посредством модуля 20ab вычисления угловой скорости руления. Модуль 20ac вычисления величины дифференциального рулевого управления выполнен с возможностью вычислять величину дифференциального рулевого управления посредством обращения к карте дифференциального руления на основе угловой скорости руления.
В данном документе, величина дифференциального рулевого управления при управлении силой реакции задается в качестве значения, полученного посредством умножения угловой скорости руления на предварительно заданное дифференциальное усиление K2 (>K1). В данном документе, дифференциальное усиление K2 задается большим по мере того, как становится выше скорость транспортного средства. Дополнительно, величина дифференциального рулевого управления задается с возможностью иметь верхний предел с определенным предельным значением, аналогично величине дифференциального рулевого управления при управлении поворотом.
[0023] Модуль 20ad сложения выполнен с возможностью суммировать величину установившегося управления рулением, вычисленную посредством модуля 20aa вычисления величины установившегося управления рулением, и величину дифференциального рулевого управления, вычисленную посредством модуля 20ac вычисления величины дифференциального рулевого управления, и формировать виртуальный целевой угол поворота.
Формирователь 20b целевой силы реакции выполнен с возможностью формировать целевую силу реакции при рулении посредством обращения к виртуальному целевому углу поворота, сформированному посредством формирователя 20a виртуального целевого угла поворота, скорости транспортного средства, состояния транспортного средства и токов поворотного электромотора (значений тока электромотора для первого и второго поворотных электромоторов 9a и 9b).
В данном документе, целевая сила Th реакции при рулении вычисляется посредством следующего выражения:
Th=Ih*d2θ/dt2+Ch*dθ/dt+Kh*θ+Th*(θ-θac)+Fh*CF+Lh*AP… (1),
где θ является виртуальным целевым углом поворота, dθ/dt является виртуальной целевой угловой скоростью поворота, которая является дифференциальным значением первого порядка виртуального целевого угла θ поворота, и d2θ/dt2 является виртуальным целевым угловым ускорением при повороте, которое является дифференциальным значением второго порядка виртуального целевого угла θ поворота.
В вышеприведенном выражении, Ih является коэффициентом инерции, Ch является коэффициентом демпфирования, Kh является коэффициентом свойства пружины, Th является коэффициентом обратной связи, Fh является коэффициентом поперечной силы на шинах, CF является поперечной силой на шинах, Lh является коэффициентом осевой силы при повороте, AP является осевой силой при повороте, преобразованной из тока поворотного электромотора, и θac является фактическим углом поворота.
[0024] Здесь, первый элемент справа является инерционным элементом, который моделирует инерционный компонент силы реакции при рулении, сформированный согласно виртуальному целевому угловому ускорению при повороте. Второй элемент является демпфирующим элементом, который моделирует компонент вязкости силы реакции при рулении, сформированный согласно виртуальной целевой угловой скорости поворота. Третий элемент является пружинным элементом (элементом жесткости), который моделирует пружинный компонент силы реакции при рулении, сформированный согласно углу поворота рулевого колеса 1. Четвертый элемент является элементом обратной связи, который моделирует компонент обратной связи силы реакции при рулении, сформированный согласно отклонению между виртуальным целевым углом поворота и фактическим углом поворота. Пятый элемент является элементом поперечной силы на шинах, который моделирует компонент поперечной силы на шинах силы реакции при рулении, сформированный согласно поперечной силе на шинах. Шестой элемент является элементом стабилизирующего крутящего момента, который моделирует компонент стабилизирующего крутящего момента силы реакции при рулении, сформированный согласно стабилизирующему крутящему моменту.
[0025] В вышеописанном выражении (1), параметры Ih, Ch, Kh, Th, Fh и Lh для определения свойств силы реакции (свойств силы реакции, которые управляют силой реакции при рулении относительно операции руления), представляют собой коэффициенты, все из которых зависят от скорости транспортного средства, и задаются большими значениями по мере того, как становится выше скорость транспортного средства. Таким образом, обеспечивается устойчивость при движении при движении на высокой скорости.
Модуль 20c приведения в движение за счет электромотора выполнен с возможностью подавать в электромотор 5 для формирования силы реакции управляющий электрический ток, в силу которого целевой электрический ток, который сформирован посредством целевого генератора силы реакции 20b согласно целевой силе реакции при рулении и фактической силы реакции (причем фактический электрический ток подается в электромотор 5 для формирования силы реакции, который обнаружен посредством датчика электрического тока (не проиллюстрирован)), совпадают между собой.
[0026] Работа
Далее описываются операции в одном варианте осуществления настоящего раскрытия сущности.
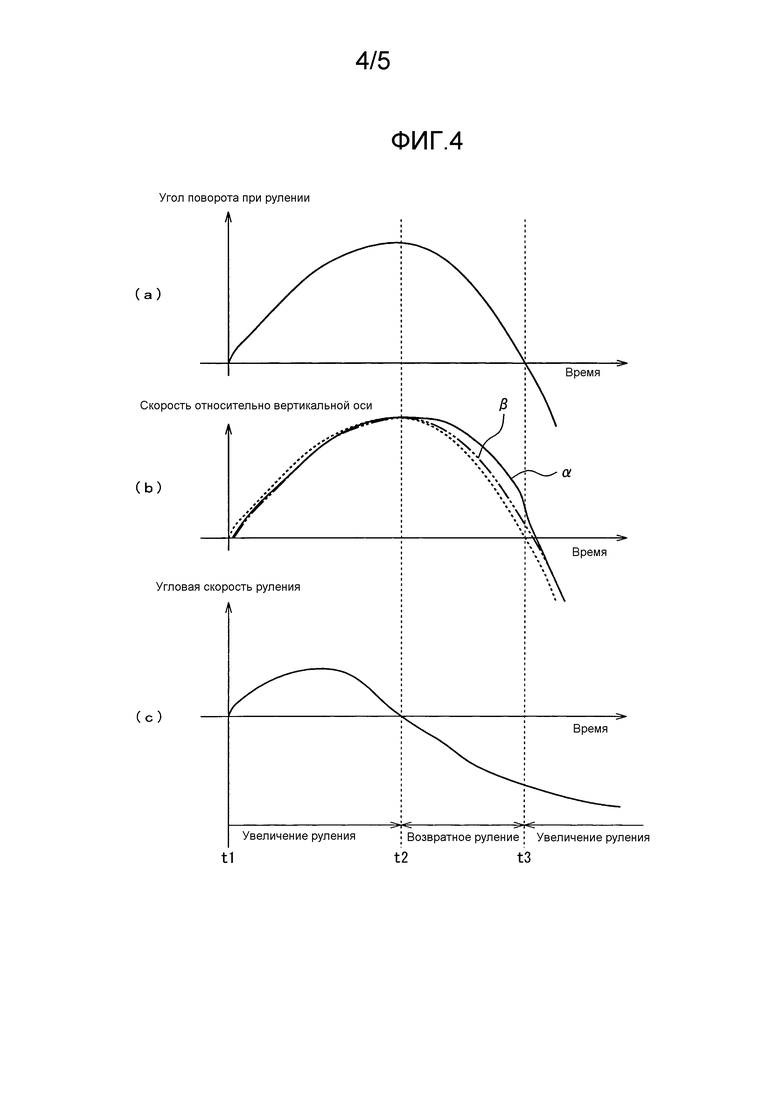
Во время t1 по фиг. 4, предполагается, что водитель начинает движение транспортного средства, которое остановлено, и водитель все больше поворачивает рулевое колесо 1. Затем контроллер 15 вычисляет целевой угол поворота на основе угла поворота при рулении и скорости транспортного средства (формирователь 19a целевого угла поворота). В этом случае, контроллер 15 обращается к карте переменного передаточного отношения, чтобы вычислять величину установившегося управления рулением (элемент установившегося режима), и помимо этого, обращается к карте дифференциального руления, чтобы вычислять величину дифференциального рулевого управления (элемент неустановившегося режима).
[0027] От времени t1 до времени t2, как проиллюстрировано на фиг. 4A и фиг. 4C, поскольку знак угла поворота при рулении и знак угловой скорости руления являются положительными, контроллер 15 определяет то, что водитель все больше поворачивает рулевое колесо 1. Следовательно, величина дифференциального рулевого управления суммируется с величиной установившегося управления рулением без изменения, и результат суммирования задается равным целевому углу поворота. Затем, контроллер 15 вычисляет управляющий электрический ток поворотного электромотора 9 на основе результата вычитания, полученного посредством вычитания фактического угла поворота из целевого угла поворота, который вычислен. Посредством приведения в действие поворотного электромотора 9 на основе управляющего электрического тока, поворотные колеса 2 поворачиваются в зависимости от операции руления водителя.
[0028] Одновременно, контроллер 15 вычисляет виртуальный целевой угол поворота на основе угла поворота при рулении и скорости транспортного средства (формирователь 20a виртуального целевого угла поворота) и формирует целевую силу реакции при рулении на основе виртуального целевого угла поворота, который вычислен, скорости транспортного средства, состояния транспортного средства и электрического тока поворотного электромотора (формирователь 20b целевой силы реакции). Затем посредством приведения в действие электромотора 5 для формирования силы реакции на основе целевой силы реакции при рулении, которая сформирована, сила реакции при рулении прикладывается к рулевому колесу 1.
Затем, когда водитель возвращает рулевое колесо 1 во время t2, поскольку знак угловой скорости руления становится отрицательным, как проиллюстрировано на фиг. 4A и фиг. 4C, знак угла поворота при рулении и знак угловой скорости руления отличаются друг от друга. Затем контроллер 15 вычисляет величину дифференциального рулевого управления, которая скорректирована посредством умножения корректирующего усиления K (например, 0,4), который меньше 1, на величину дифференциального рулевого управления, которая вычислена на основе угловой скорости рулевого управления. Затем результат, полученный посредством суммирования величины дифференциального рулевого управления, которая скорректирована, с величиной установившегося управления рулением, задается равным целевому углу поворота, так что поворотный электромотор 9 приводится в действие и управляется.
[0029] Затем, когда водитель увеличивает поворот рулевого колеса 1 во время t3, как проиллюстрировано на фиг. 4A и фиг. 4C, знак угла поворота при рулении и знак угловой скорости руления снова являются идентичными между собой. Следовательно, контроллер 15 суммирует величину дифференциального рулевого управления, которая вычислена на основе угловой скорости руления, с величиной установившегося управления рулением без изменения и задает результат суммирования в качестве целевого угла поворота для того, чтобы управлять приведением в действие поворотного электромотора 9.
Таким образом, в то время как водитель возвращает рулевое колесо, величина дифференциального рулевого управления вычисляется как меньшая, чем величина дифференциального рулевого управления при операции увеличения руления. Другими словами, в случае, если водитель возвращает рулевое колесо, фаза угла поворота (т.е. скорость относительно вертикальной оси транспортного средства) относительно угла поворота при рулении задерживается по сравнению со случаем, в котором водитель все больше поворачивает рулевое колесо, так что ухудшаются рабочие характеристики по отклику вывода при поворачивании относительно ввода руления.
[0030] Водитель задает угол поворота при рулении посредством приложения силы к рулевому колесу 1 при операции увеличения руления. В этом случае, можно сказать, что поворот без задержки отклика относительно ввода руления водителя представляет собой идеальное ощущение при рулении для водителя. Таким образом, чтобы реализовывать такой целевой отклик при операции увеличения рулевого управления, можно считать, что при управлении поворотом, карта дифференциального рулевого управления задается с возможностью формировать целевой угол поворота, подходящий для целевого отклика при операции увеличения руления. В этом случае, когда отклики при поворачивании при операции возвратного руления и операции увеличения руления задаются одинаковыми, скорость относительно вертикальной оси транспортного средства изменяется, как указано посредством штрихпунктирной линии β с двумя точками по фиг. 4B. Другими словами, при операции возвратного руления и при операции увеличения руления задержка отклика скорости относительно вертикальной оси транспортного средства относительно угла поворота при рулении исключается.
[0031] В общем, в SBW-системе, фазы угла поворота (т.е. скорость относительно вертикальной оси транспортного средства) относительно угла поворота при рулении являются почти идентичными при операции увеличения руления и при операции возвратного руления. Другими словами, когда фаза угла поворота относительно угла поворота при рулении выполняется к фазе опережения, чтобы реализовывать целевой отклик при операции увеличения руления, рабочие характеристики по отклику вывода при поворачивании относительно ввода руления при операции возвратного руления улучшаются аналогично операции увеличения руления.
В таком случае, в общем, в SBW-системе, целесообразно достигать быстрого изменения поведения транспортного средства и комфортных ощущений при рулении, так что рабочие характеристики по отклику вывода при поворачивании относительно ввода руления задаются высокими, независимо от операции увеличения руления или операции возвратного руления, как описано выше.
[0032] Тем не менее, следует понимать, что идеальные ощущения при рулении, запрошенные водителями, фактически обусловлены тем, что отклик не задерживается при операции увеличения руления и скорость относительно вертикальной оси транспортного средства и рулевое колесо возвращаются естественно, когда водитель прекращает прикладывать силу к рулевому колесу и возвращает рулевое колесо. Другими словами, идеальные ощущения при рулевом колесе, запрошенные водителями, обусловлены тем, что отклик не задерживается при операции увеличения рулевого колеса и отклик задерживается при операции возвратного руления, вместо достижения высоких откликов при поворачивании как при операции увеличения руления, так и при операции возвратного руления.
[0033] Например, в EPS (электроусилителе рулевого управления), рулевое колесо и поворотные колеса механически зацепляются друг с другом, чтобы осуществлять управление помощью при рулении таким образом, чтобы прикладывать вспомогательную силу при рулении к системе рулевого управления, чтобы уменьшать нагрузку по рулению водителя. В EPS, вспомогательная сила в зависимости от ввода руления водителя формируется при операции увеличения руления, тогда как вспомогательная сила ослабляется в зависимости от силы реакции на шинах при операции возвратного руления. При операции возвратного руления транспортное средство и рулевое колесо возвращаются естественно.
Какое ощущение при рулении представляет собой ощущение без некомфортного ощущения у водителя, зависит от предыдущего опыта вождения водителя. Другими словами, водитель, который испытывает вышеописанное ощущение при рулении EPS, имеет тенденцию ощущать, что оно представляет собой идеальное ощущение при рулении.
Следовательно, когда дифференциальное рулевое управление регулируется для операции увеличения руления, как описано выше, и отклики при поворачивании задаются высокими как при операции возвратного руления, так и при операции увеличения руления, возврат скорости относительно вертикальной оси становится слишком ранним относительно угла поворота при рулении посредством чрезмерного эффекта опережения по фазе при операции возвратного руления. Как результат, некомфортное ощущение вызывается у водителя.
[0034] Таким образом, авторы изобретения настоящего раскрытия сущности обратили внимание на этот факт в первый раз. В одном варианте осуществления настоящего раскрытия сущности, в то время как водитель возвращает рулевое колесо при управлении поворотом, рабочие характеристики по отклику вывода при поворачивании относительно ввода руления заданы ниже рабочих характеристик по отклику при операции увеличения руления. Конкретно, в то время как водитель возвращает рулевое колесо, величина дифференциального рулевого управления вычисляется как меньшая, чем величина дифференциального рулевого управления, в то время как водитель все больше поворачивает рулевое колесо. Соответственно, как указано посредством сплошной линии α по фиг. 4B, в случае, если водитель возвращает рулевое колесо (время t2-t3), отклик при поворачивании может задерживаться по сравнению со случаем, в котором водитель все больше поворачивает рулевое колесо. Таким образом, естественный возврат скорости относительно вертикальной оси в угол поворота при рулении может достигаться при операции возвратного руления.
Другими словами, перемещения для управления силой в EPS могут быть моделированы при управлении углом в SBW. Как результат, ощущение при рулении SBW может быть ближе к идеальному ощущению при рулении EPS.
[0035] Следует отметить, что на фиг. 2, модуль 19aa вычисления величины установившегося управления рулением соответствует модулю вычисления величины установившегося управления рулением, модуль 19ad вычисления величины дифференциального рулевого управления и модуль 19ae умножения усиления соответствуют модулю вычисления величины дифференциального рулевого управления и модуль 19af сложения соответствует модулю задания целевого угла поворота. В данном документе, модуль 19ad вычисления величины дифференциального рулевого управления соответствует модулю вычисления опорных значений. Помимо этого, модуль 19ac определения увеличения/возвратного руления соответствует детектору операции возвратного руления.
[0036] Преимущества
В вариантах осуществления настоящего раскрытия сущности, могут получаться следующие преимущества.
(1) Контроллер 19 поворота обнаруживает операцию возвратного руления с помощью рулевого колеса 1, приводимого в действие водителем. Затем в случае, если обнаруживается операция возвратного руления водителем, контроллер 19 поворота задает рабочие характеристики по отклику вывода при поворачивании относительно ввода руления худшими рабочих характеристик по отклику в случае, если обнаруживается операция увеличения руления водителем.
Таким образом, при управлении при поворачивании, отклик при поворачивании при операции возвратного руления может задерживаться по сравнению с откликом при поворачивании при операции увеличения руления. Соответственно, даже если дифференциальное рулевое управление регулируется для операции увеличения руления, чтобы получать отклик при поворачивании без задержки отклика при операции увеличения руления, чрезмерный эффект опережения по фазе не затрагивается при операции возвратного руления. Другими словами, могут достигаться идеальные ощущения при рулении, так что отсутствует задержка отклика при операции увеличения руления и рулевое колесо 1 естественно возвращается при операции возвратного руления.
[0037] (2) Контроллер 19 поворота вычисляет величину установившегося управления рулением, которая является величиной управления, зависящей от угла поворота при рулении. Помимо этого, контроллер 19 поворота вычисляет величину дифференциального рулевого управления, которая является величиной управления, зависящей от угловой скорости руления. Дополнительно, контроллер 19 поворота суммирует величину установившегося управления рулением и величину дифференциального рулевого управления и задает результат суммирования в качестве целевого угла поворота поворотного колеса. Затем в случае, если обнаруживается операция возвратного руления рулевого колеса 1 водителем, контроллер 19 поворота вычисляет величину дифференциального рулевого управления как меньшую, чем величина дифференциального рулевого управления в случае, если не обнаруживается операция возвратного руления.
Таким образом, при управлении поворотом величина дифференциального рулевого управления при операции возвратного руления вычисляется как меньшая, чем величина дифференциального рулевого управления при операции увеличения руления. Следовательно, фаза угла поворота (т.е. скорость относительно вертикальной оси транспортного средства) относительно угла поворота при рулении может задерживаться при операции возвратного руления по сравнению с операцией увеличения руления. Таким образом, рабочие характеристики по отклику вывода при поворачивании относительно ввода руления при операции возвратного руления могут быть заданы ниже рабочих характеристик по отклику при операции увеличения руления, надлежащим образом.
[0038] (3) Контроллер 19 поворота вычисляет опорное значение величины дифференциального рулевого управления на основе угловой скорости руления рулевого колеса 1. Затем контроллер 19 поворота вычисляет величину дифференциального рулевого управления посредством умножения опорного значения величины дифференциального рулевого управления на усиление согласно результату определения операции рулевого управления (операции увеличения рулевого управления /операции возвратного руления).
Таким образом, при операции возвратного руления меньшее усиление по сравнению с усилением при операции увеличения руления умножается на опорное значение величины дифференциального рулевого управления, так что величина дифференциального рулевого управления при операции возвратного руления вычисляется как меньшая, чем величина дифференциального рулевого управления при операции увеличения руления. Таким образом, отклик при поворачивании при операции возвратного руления может задерживаться по сравнению с откликом при поворачивании при операции увеличения руления, надлежащим образом.
[0039] (4) Контроллер 19 поворота определяет то, что водитель возвращает рулевое колесо, когда знак угла поворота при рулении и знак угловой скорости руления отличаются друг от друга.
Соответственно, операция возвратного руления рулевого колеса 1, приводимого в действие водителем, может обнаруживаться легко и надлежащим образом. Помимо этого, угол поворота при рулении, который должен использоваться для вычисления величины установившегося управления рулением, и угловая скорость рулевого управления, которая должна использоваться для вычисления величины дифференциального рулевого управления, используются для обнаружения операции возвратного руления. Следовательно, нет необходимости отдельно предоставлять датчик для обнаружения операции возвратного руления.
[0040] (5) В случае, если обнаруживается операция возвратного руления водителем, рабочие характеристики по отклику вывода при поворачивании относительно ввода руления заданы ниже рабочих характеристик по отклику в случае, если обнаруживается операция увеличения руления водителем.
Таким образом, при управлении поворотом отклик при поворачивании при операции возвратного руления может задерживаться по сравнению с откликом при поворачивании при операции увеличения руления. Соответственно, можно достигать идеального ощущения при рулении, так что отсутствует задержка отклика при операции увеличения руления и рулевое колесо 1 естественно возвращается при операции возвратного руления.
[0041] Модификации
(1) В вышеописанных вариантах осуществления, приведено описание случая, в котором корректирующее усиление K умножается на величину дифференциального рулевого управления, которая вычислена на основе угловой скорости руления. Тем не менее, величина дифференциального рулевого управления может вычисляться посредством изменения карт дифференциального рулевого управления между операцией увеличения руления и операцией возвратного руления. В этом случае, блок управления для управления поворотом проиллюстрирован на фиг. 5. Другими словами, карта дифференциального рулевого управления, которая должна использоваться посредством модуля 19ad вычисления величины дифференциального рулевого управления, изменяется в зависимости от результата определения модуля 19ac определения увеличения/возвратного руления. Соответственно, можно вычислять величину дифференциального рулевого управления при операции возвратного руления как меньшую, чем величина дифференциального рулевого управления при операции увеличения руления сравнительно простым способом. Таким образом, отклик при поворачивании при операции возвратного руления может задерживаться по сравнению с откликом при поворачивании при операции увеличения руления надлежащим образом, так что может достигаться идеальное ощущение при рулевом управлении.
[0042] (2) В вышеописанных вариантах осуществления, приведено описание случая, в котором операция возвратного руления рулевого колеса 1, приводимого в действие водителем, обнаруживается посредством сравнения знака угла поворота при рулении со знаком угловой скорости рулевого управления. Тем не менее, способ обнаружения не ограничен этим. Например, может использоваться другой способ обнаружения посредством сравнения знака скорости относительно вертикальной оси транспортного средства со знаком угловой скорости руления или сравнения знака поперечного G транспортного средства со знаком угловой скорости рулевого управления.
(3) В вышеописанных вариантах осуществления, приведено описание случая, в котором величина дифференциального рулевого управления вычисляется согласно угловой скорости рулевого управления. Тем не менее, целевые углы поворота (виртуальные целевые углы поворота), которые вычислены посредством модулей (19aa и 20aa) вычисления для установившегося управления рулением, могут использоваться для вычисления величины дифференциального рулевого управления согласно целевой угловой скорости поворота, которая дифференцирована. Поскольку целевой угол поворота (виртуальный целевой угол поворота) вычисляется на основе угла поворота при рулении, даже если целевая угловая скорость поворота используется вместо угловой скорости рулевого управления, может получаться идентичный результат.
(4) В вышеописанных вариантах осуществления, приведено описание случая, в котором величина дифференциального рулевого управления при операции возвратного руления вычисляется как меньшая, чем величина дифференциального рулевого управления при операции увеличения руления. Тем не менее, при условии, что отклик вывода при поворачивании относительно ввода руления при операции возвратного руления может быть задан ниже отклика при операции увеличения руления, любая технология может выбираться надлежащим образом.
Промышленная применимость
[0043] Согласно устройству управления рулением транспортного средства в настоящем раскрытии сущности, при управлении поворотом, отклик при поворачивании при операции возвратного руления может задерживаться по сравнению с откликом при поворачивании при операции увеличения руления. Таким образом, можно достигать идеального ощущения при рулевом управлении, так что отсутствует задержка отклика при операции увеличения руления и рулевое колесо естественно возвращается при операции возвратного руления, что является полезным.
Список номеров ссылок
[0044] 1 - рулевое колесо
2 - передние колеса (поворотные колеса)
3 - механизм рулевого управления
4 - вал рулевой колонки
5 - электромотор для формирования силы реакции
6 - датчик угла поворота
7 - датчик крутящего момента рулевого управления
8 - датчик угла электромотора для формирования силы реакции
9a 9b - поворотный электромотор
10a 10b - датчик угла поворота поворотного электромотора
11 - зубчатая рейка
12a 12b - датчик поперечной силы на шинах
13 - вал шестерни
14 - первый контроллер
15 - второй контроллер
16 - третий контроллер
17 - аккумулятор
18 - линия связи
19 - контроллер поворота
19a - формирователь целевого угла поворота
19aa - модуль вычисления величины установившегося управления рулением
19ab - модуль вычисления угловой скорости руления
19ac - модуль определения увеличения/возвратного руления
19ad - модуль вычисления величины дифференциального рулевого управления
19ae - модуль умножения усиления
19af - сумматор
19b - модуль приведения в движение за счет электромотора
20 - контроллер силы реакции при рулении
20a - формирователь виртуального целевого угла поворота
20aa - модуль вычисления величины установившегося управления рулением
20ab - модуль вычисления угловой скорости руления
20ac - модуль вычисления величины дифференциального рулевого управления
20ad - сумматор
20b - формирователь целевой силы реакции
20c - модуль приведения в движение за счет электромотора
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2014 |
|
RU2627262C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2633023C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ВЫПОЛНЕНИЕМ РУЛЕНИЯ ДЛЯ УПРАВЛЯЕМОГО КОЛЕСА | 2012 |
|
RU2555902C2 |


Устройство управления рулением содержит контроллер поворота (19), детектор операции возвратного руления. Контроллер (19) поворота выполнен с возможностью задавать в качестве целевого угла поворота поворотного колеса значение суммирования, полученное посредством суммирования величины установившегося управления рулением, которая является величиной управления, зависящей от угла поворота при рулении, и величины дифференциального рулевого управления, которая является величиной управления, зависящей от угловой скорости руления. Контроллер (19) также содержит модуль вычисления величины дифференциального рулевого управления. Модуль вычисления величины дифференциального рулевого управления содержит модуль вычисления опорных значений, модуль умножения усиления. Когда детектор операции возвратного руления обнаруживает операцию возвратного руления с помощью рулевого колеса, приводимого в действие водителем, модуль умножения усиления выполнен с возможностью задавать усиление меньшим, чем усиление, сформированное, когда детектор операции возвратного руления обнаруживает операцию увеличения руления. Предложены также устройство управления рулением транспортного средства и способы управления рулением транспортного средства. Достигается идеальное ощущение при рулении. 4 н. и 2 з.п. ф-лы, 5 ил.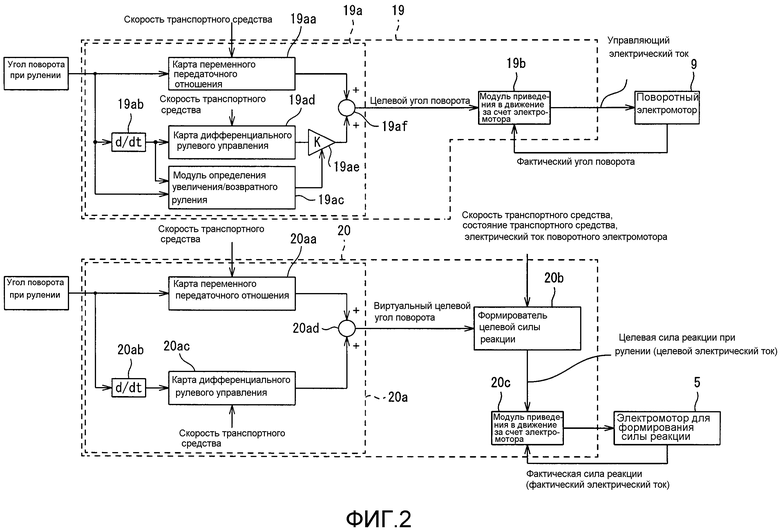
1. Устройство управления рулением транспортного средства, содержащее:
- контроллер поворота, выполненный с возможностью управлять поворотом поворотного колеса на целевой угол поворота в зависимости от состояния рулевого управления рулевого колеса, причем рулевое колесо механически отделено от поворотного колеса; и
- детектор операции возвратного руления, выполненный с возможностью обнаруживать операцию возвратного руления с помощью рулевого колеса, приводимого в действие водителем,
- при этом контроллер поворота содержит:
- модуль вычисления величины установившегося управления рулением, выполненный с возможностью вычислять величину установившегося управления рулением, которая является величиной управления, зависящей от угла рулевого управления рулевого колеса;
- модуль вычисления величины дифференциального рулевого управления, выполненный с возможностью вычислять величину дифференциального рулевого управления, которая является величиной управления в зависимости от угловой скорости руления рулевого колеса; и
- модуль задания целевого угла поворота, выполненный с возможностью задавать в качестве целевого угла поворота значение суммирования, полученное посредством суммирования величины установившегося управления рулением, вычисленной посредством модуля вычисления величины установившегося управления рулением, и величины дифференциального рулевого управления, вычисленной посредством модуля вычисления величины дифференциального рулевого управления,
- при этом модуль вычисления величины дифференциального рулевого управления содержит:
- модуль вычисления опорных значений, выполненный с возможностью вычислять опорное значение величины дифференциального рулевого управления на основе угловой скорости
руления рулевого колеса; и
- модуль умножения усиления, выполненный с возможностью вычислять величину дифференциального рулевого управления, полученную посредством умножения опорного значения величины дифференциального рулевого управления, вычисленной посредством модуля вычисления опорных значений, на усиление в зависимости от результата обнаружения детектора операции возвратного руления, и
- при этом, когда детектор операции возвратного руления обнаруживает операцию возвратного руления с помощью рулевого колеса, приводимого в действие водителем, модуль умножения усиления выполнен с возможностью задавать усиление меньшим, чем усиление, сформированное, когда детектор операции возвратного руления обнаруживает операцию увеличения руления.
2. Устройство управления рулением транспортного средства по п. 1, в котором модуль вычисления опорных значений выполнен с возможностью вычислять опорное значение величины дифференциального рулевого управления из угловой скорости руления рулевого колеса и карты дифференциального рулевого управления, на которой угловая скорость руления рулевого колеса и опорное значение величины дифференциального рулевого управления связаны между собой.
3. Устройство управления рулением транспортного средства по п. 2, в котором карта дифференциального рулевого управления выполнена с возможностью вычислять опорное значение величины дифференциального рулевого управления как большее по мере того, как скорость транспортного средства становится выше.
4. Устройство управления рулением транспортного средства, содержащее:
- контроллер поворота, выполненный с возможностью управлять поворотом поворотного колеса на целевой угол поворота в зависимости от состояния руления рулевого колеса, причем рулевое колесо механически отделено от поворотного колеса; и
- детектор операции возвратного руления, выполненный с возможностью обнаруживать операцию возвратного руления с помощью рулевого колеса, приводимого в действие водителем,
- при этом контроллер поворота содержит:
- модуль вычисления величины установившегося управления рулением, выполненный с возможностью вычислять величину установившегося управления рулением, которая является величиной управления, зависящей от угла рулевого управления рулевого колеса;
- модуль вычисления величины дифференциального рулевого управления, выполненный с возможностью вычислять величину дифференциального рулевого управления, которая является величиной управления, зависящей от угловой скорости руления рулевого колеса; и
- модуль задания целевого угла поворота, выполненный с возможностью задавать в качестве целевого угла поворота значение суммирования, полученное посредством суммирования величины установившегося управления рулением, вычисленной посредством модуля вычисления величины установившегося управления рулением, и величины дифференциального рулевого управления, вычисленной посредством модуля вычисления величины дифференциального рулевого управления,
- при этом модуль вычисления величины дифференциального рулевого управления выполнен с возможностью вычислять величину дифференциального рулевого управления из угловой скорости руления рулевого колеса и карты дифференциального рулевого руления, на которой угловая скорость руления рулевого колеса и величина дифференциального рулевого управления связаны между собой, и
- при этом, когда детектор операции возвратного руления обнаруживает операцию возвратного руления с помощью рулевого колеса, приводимого в действие водителем, модуль вычисления величины дифференциального рулевого управления выполнен с возможностью вычислять величину дифференциального рулевого управления как меньшую, посредством обращения к карте дифференциального рулевого управления, которая отличается от другой карты дифференциального рулевого управления, когда детектор операции возвратного руления обнаруживает операцию увеличения руления, чем величина дифференциального рулевого управления, сформированная, когда детектор операции возвратного руления обнаруживает операцию увеличения руления.
5. Способ управления рулением транспортного средства, содержащий этапы, на которых:
- задают в качестве целевого угла поворота значение суммирования, полученное посредством суммирования величины установившегося управления рулением, которая является величиной управления, зависящей от угла рулевого управления рулевого колеса, и величины дифференциального рулевого управления, которая является величиной управления, зависящей от угловой скорости рулевого управления рулевого колеса, причем рулевое колесо механически отделено от поворотного колеса;
- управляют поворотом поворотного колеса на целевой угол поворота, который задан;
- вычисляют опорное значение величины дифференциального рулевого управления на основе угловой скорости руления рулевого колеса;
- вычисляют величину дифференциального рулевого управления, полученную посредством умножения опорного значения величины дифференциального рулевого управления, которая вычислена, на усиление; и
- когда обнаруживается операция возвратного руления с помощью рулевого колеса, приводимого в действие водителем, задают усиление меньшим, чем усиление, сформированное, когда обнаруживается операция увеличения руления.
6. Способ управления рулением транспортного средства, содержащий этапы, на которых:
- задают в качестве целевого угла поворота значение суммирования, полученное посредством суммирования величины установившегося управления рулением, которая является величиной управления, зависящей от угла рулевого управления рулевого колеса, и величины дифференциального рулевого управления, которая является величиной управления, зависящей от угловой скорости руления рулевого колеса, причем рулевое колесо механически отделено от поворотного колеса;
- управляют поворотом поворотного колеса на целевой угол поворота, который задан;
- вычисляют величину дифференциального рулевого управления из угловой скорости руления рулевого колеса и карты дифференциального руления, на которой угловая скорость руления рулевого колеса и величина дифференциального рулевого управления связаны между собой; и
- когда обнаруживается операция возвратного руления с помощью рулевого колеса, приводимого в действие водителем, вычисляют величину дифференциального рулевого управления как меньшую, посредством обращения к карте дифференциального руления, которая отличается от другой карты дифференциального рулевого управления, когда обнаруживается операция увеличения руления, чем величина дифференциального рулевого управления, когда обнаруживается операция увеличения руления.
| US5097917A, 24.03.1992 | |||
| JP2002046639A, 12.02.2002 | |||
| JP2004314891A, 11.11.2004. |

