В настоящей заявке испрашивается приоритет по патентной заявке Китая №201510609516.0, поданной 22 сентября 2015 г., содержание которой в полном объеме включено в настоящий документ путем ссылки.
Область техники
Настоящее изобретение относится, в целом, к области технологии беспроводной связи, в частности к способу и устройству навигации, а также к способу и устройству формирования навигационного видеоизображения.
Уровень техники
В настоящее время все навигационные системы основаны на картах, при этом пользователю необходимо распознавать абстрактные карты и упрощать их распознавание во время вождения. Поскольку некоторые пользователи в силу природных способностей плохо разбираются в картах, они легко теряются в сложной системе городских строений или на многочисленных перекрестках дорог.
Раскрытие изобретения
Таким образом, в настоящем изобретении предложены способ и устройство навигации, а также способ и устройство формирования навигационного видеоизображения. При этом в настоящем изобретении раскрыты следующие технические решения.
В соответствии с первым аспектом в настоящем изобретении предложен способ навигации, содержащий следующие этапы: получают навигационный запрос, определяют навигационное видеоизображение, согласующееся с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, и осуществляют навигацию на основе указанного навигационного видеоизображения.
В одном из предпочтительных вариантов осуществления настоящего изобретения, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает получение начальной навигационной точки и конечной навигационной точки навигационного видеоизображения, определение навигационного видеоизображения, начальная навигационная точка и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В другом предпочтительном варианте осуществления настоящего изобретения указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает вычисление навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, запрашивание навигационного видеоизображения, содержащего указанный навигационный маршрут, вырезание из указанного навигационного видеоизображения, содержащего навигационный маршрут, навигационного видеоизображения, которое соответствует указанному навигационному маршруту, и определение указанного навигационного видеоизображения, соответствующего навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В еще одном предпочтительном варианте осуществления настоящего изобретения указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает вычисление навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, деление указанного навигационного маршрута по меньшей мере на два навигационных подмаршрута, запрашивание навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам, соединение указанных навигационных видеоизображений, соответствующих навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и с указанной конечной навигационной точкой.
В альтернативном варианте осуществления настоящего изобретения указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние, причем в случае когда путем запрашивания получают по меньшей мере два навигационных видеоизображения, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой, этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает: получение навигационных параметров указанных навигационных видеоизображений, вычисление степеней согласования указанных навигационных параметров навигационного запроса с навигационными параметрами навигационных видеоизображений, и определение навигационного видеоизображения, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определение навигационных видеоизображений, степени согласования которых превышают предварительно заданное пороговое значение, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определение предварительно заданного числа навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
В еще одном предпочтительном варианте осуществления настоящего изобретения, в случае применения указанного способа в отношении сети, этап осуществления навигации на основе навигационного видеоизображения, предусматривает отправку указанного навигационного видеоизображения в терминал, для его воспроизведения.
В одном из альтернативных вариантов осуществления настоящего изобретения в случае применения указанного способа в отношении терминала, этап осуществления навигации на основе навигационного видеоизображения предусматривает воспроизведение указанного навигационного видеоизображения.
В другом варианте осуществления настоящего изобретения, в случае когда определяют по меньше мере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, этап осуществления навигации на основе навигационного видеоизображения предусматривает упорядочивание и отображение навигационных видеоизображений, согласующихся с указанным навигационным запросом, прием от пользователя команды на выбор одного из указанных навигационных видеоизображений и воспроизведение выбранного навигационного видеоизображения.
В еще одном предпочтительном варианте осуществления настоящего изобретения этап осуществления навигации на основе навигационного видеоизображения предусматривает: получение текущего значения скорости движения, определение скорости воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения и воспроизведение навигационного видеоизображения с указанной скоростью воспроизведения.
В другом варианте осуществления настоящего изобретения в случае применения указанного способа в отношении терминала, указанный способ содержит этапы, на которых: синхронизируют навигационные данные из сети, причем указанные навигационные данные содержат навигационное видеоизображение, и сохраняют указанные навигационные данные в локальной навигационной базе данных, причем этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает запрашивание навигационного видеоизображения, согласующегося с указанным навигационным запросом, из указанной локальной навигационной базы данных.
В соответствии со вторым аспектом в настоящем изобретении предложен способ формирования навигационного видеоизображения, содержащий следующие этапы: получают навигационные параметры, введенные пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конечную навигационную точку, осуществляют натурную съемку дороги для получения отснятого видеоизображения, причем съемку останавливают при достижении указанной конечной навигационной точки, осуществляют привязку указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения, и загружают указанное навигационное видеоизображение в сеть.
В альтернативном варианте осуществления настоящего изображения указанный способ дополнительно содержит этапы, на которых записывают значения скорости движения и вычисляют среднюю скорость движения на основе указанных значений скорости движения, причем этап привязки навигационных параметров к отснятому видеоизображению предусматривает принятие указанной средней скорости движения в качестве навигационного параметра для его привязки к отснятому видеоизображению.
В соответствии с третьим аспектом в настоящем изобретением предложено устройство навигации, содержащее принимающий модуль, выполненный с возможностью получения навигационного запроса, определяющий модуль, выполненный с возможностью определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, и навигационный модуль, выполненный с возможностью осуществления навигации на основе указанного навигационного видеоизображения.
В одном из предпочтительных вариантов осуществления настоящего изобретения указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем указанный определяющий модуль содержит: первый принимающий подмодуль, выполненный с возможностью получения начальных навигационных точек и конечных навигационных точек навигационных видеоизображений, и определяющий подмодуль, выполненный с возможностью определения навигационного видеоизображения, начальная навигационная точка и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В другом предпочтительном варианте осуществления настоящего изобретения указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем указанный определяющий модуль содержит первый вычислительный подмодуль, выполненный с возможностью вычисления навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, запрашивающий подмодуль, выполненный с возможностью запрашивания навигационного видеоизображения, содержащего указанный навигационный маршрут, и вырезающий подмодуль, выполненный с возможностью вырезания из указанного навигационного видеоизображения, содержащего навигационный маршрут, навигационного видеоизображения, которое соответствует указанному навигационному маршруту, и определения навигационного видеоизображения, соответствующего навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В еще одном предпочтительном варианте осуществления настоящего изобретения указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем указанный определяющий модуль содержит первый вычислительный подмодуль, выполненный с возможностью вычисления навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, делительный подмодуль, выполненный с возможностью деления навигационного маршрута по меньшей мере на два навигационных подмаршрута, запрашивающий подмодуль, выполненный с возможностью запрашивания навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам, и соединительный подмодуль, выполненный с возможностью соединения указанных навигационных видеоизображений, соответствующих навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В другом предпочтительном варианте осуществления настоящего изобретения указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние, причем указанный определяющий модуль содержит второй принимающий подмодуль, который, в случае, когда путем запрашивания получено по меньшей мере два навигационных видеоизображения, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой, выполнен с возможностью вычисления степеней согласования указанных навигационных параметров навигационного запроса с навигационными параметрами указанных навигационных видеоизображений, причем указанный определяющий подмодуль выполнен с возможностью определения навигационного видеоизображения, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определения навигационных видеоизображений, степени согласования которых превышают предварительно заданное пороговое значение, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определения предварительно заданного числа навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
В одном из предпочтительных вариантов осуществления настоящего изобретения, в случае применения указанного устройства в отношении сети, указанный навигационный модуль выполнен с возможностью отправки указанного навигационного видеоизображения в терминал для его воспроизведения.
В альтернативном варианте осуществления настоящего изобретения, в случае применения указанного устройства в отношении терминала, указанный навигационный модуль выполнен с возможностью воспроизведения указанного навигационного видеоизображения.
В другом предпочтительном варианте осуществления настоящего изобретения указанный навигационный модуль содержит отображающий подмодуль, который, в случае когда определено по меньшей сере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, выполнен с возможностью упорядочивания и отображения навигационных видеоизображений, согласующихся с указанным навигационным запросом, приемный подмодуль, выполненный с возможностью приема от пользователя команды на выбор одного из указанных навигационных видеоизображений, и воспроизводящий подмодуль, выполненный с возможностью воспроизведения выбранного навигационного видеоизображения.
В еще одном предпочтительном варианте осуществления настоящего изобретения указанный навигационный модуль содержит принимающий подмодуль, выполненный с возможностью получения текущего значения скорости движения, определяющий подмодуль, выполненный с возможностью определения скорости воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения, и воспроизводящий подмодуль, выполненный с возможностью воспроизведения навигационного видеоизображения с указанной скоростью воспроизведения.
В альтернативном варианте осуществления настоящего изобретения указанное устройство дополнительно содержит: синхронизирующий модуль, выполненный с возможностью синхронизации навигационных данных из сети в случае применения указанного устройства в отношении терминала, причем указанные навигационные данные содержат навигационное видеоизображение, и запоминающий модуль, выполненный с возможностью хранения указанных навигационных данных в локальной навигационной базе данных, причем указанный определяющий модуль выполнен с возможностью запрашивания навигационного видеоизображения, согласующегося с указанным навигационным запросом, из указанной локальной навигационной базы данных.
В соответствии с четвертым аспектом в настоящем изобретении предложено устройство формирования навигационного видеоизображения, содержащее: принимающий модуль, выполненный с возможностью получения навигационных параметров, введенных пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конечную навигационную точку, модуль съемки, выполненный с возможностью натурной съемки дороги для получения отснятого видеоизображения, причем обеспечена возможность остановки съемки при достижении указанной конечной навигационной точки, модуль привязки, выполненный с возможностью привязки указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения, и загрузочный модуль, выполненный с возможностью загрузки указанного навигационного видеоизображения в сеть.
В еще одном варианте осуществления настоящего изобретения указанное устройство дополнительно содержит записывающий модуль, выполненный с возможностью записи значений скорости движения, и вычислительный модуль, выполненный с возможностью вычисления средней скорости движения на основе указанных значений скорости движения, причем указанный модуль привязки выполнен с возможностью принятия указанной средней скорости движения в качестве навигационного параметра для его привязки к отснятому видеоизображению.
В соответствии с пятым аспектом в настоящем изобретении предложено устройство навигации, содержащее процессор и запоминающее устройство, предназначенное для хранения инструкций, исполняемых указанным процессором, причем указанный процессор выполнен с возможностью получения навигационного запроса, определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, и осуществления навигации на основе указанного навигационного видеоизображения.
В соответствии с шестым аспектом в настоящем изобретении предложено устройство формирования навигационного видеоизображения, содержащее процессор и запоминающее устройство, предназначенное для хранения инструкций, исполняемых указанным процессором, причем указанный процессор выполнен с возможностью получения навигационных параметров, введенных пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конечную навигационную точку, осуществления натурной съемки дороги для получения отснятого видеоизображения, причем предусмотрена возможность остановки съемки при достижении указанной конечной навигационной точки, привязки указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения, и загрузки указанного навигационного видеоизображения в сеть.
Раскрытые в настоящем изобретении варианты осуществления обеспечивают по меньшей мере следующие преимущества. Благодаря предлагаемому техническому решению навигация осуществляется с помощью реального видеоизображения, что уменьшает время срабатывания карт и упрощает процесс идентификации для пользователя во время вождения. При этом предлагаемое техническое решение является более чувствительным к дорожным условиям и направлениям движения, благодаря чему оно обеспечивает более наглядную навигацию, чтобы пользователь не потерялся в сложной системе городских строений или на многочисленных перекрестках дорог. Таким образом, предлагаемое техническое решение повышает точность навигации, а также улучшает опыт пользователя.
В одном из предпочтительных вариантов осуществления настоящего изобретения, запрашивают соответствующее навигационное видеоизображение согласно начальной навигационной точке и конечной навигационной точке навигационного запроса, что позволяет непосредственно сравнивать его с указанной начальной навигационной точкой и указанной конечной навигационной точкой навигационного видеоизображения, в результате чего получают навигационное видеоизображение, которое пользователь точно хочет запросить.
В еще одном предпочтительном варианте осуществления настоящего изобретения, если запрашиваемая начальная точка близка к конечной точке, то, возможно, навигационное видеоизображение, полностью соответствующее требованиям пользователя, отсутствует, но при этом могут существовать навигационные видеоизображения, которые содержат навигационный маршрут и из которых может быть вырезано навигационное видеоизображение, соответствующее запрошенному маршруту. Таким образом, оно будет соответствовать навигационному видеоизображению, которое точно необходимо пользователю для улучшения точности навигации.
В одном из предпочтительных вариантов осуществления настоящего изобретения путем соединения навигационных видеоизображений, требуемых пользователю, можно получить навигационное видеоизображение, согласующееся с навигационным видеоизображением, точно необходимым пользователю для повышения точности навигации.
В другом предпочтительном варианте осуществления настоящего изобретения путем фильтрации запрошенных навигационных видеоизображений в соответствии с указанными параметрами, можно обеспечить более точное навигационное видеоизображение, степень согласования которого является наибольшей, что необходимо пользователю для повышения точности навигации и улучшения опыта пользователя.
В еще одном предпочтительном варианте осуществления настоящего изобретения, если операция согласования навигационного видеоизображения на основе навигационного запроса остановлена сервером в сети, серверу необходимо принудительно доставить навигационное видеоизображение, которое было согласовано, в терминал, использованный для выполнения запроса. Таким образом, настоящее изобретение позволяет хранить навигационные видеоданные, не используя большое пространство памяти, но при этом потребляя конкретный трафик данных.
В другом предпочтительном варианте осуществления настоящего изобретения, если операция согласования навигационного видеоизображения на основе навигационного запроса остановлена терминалом, то указанный терминал предварительно сохраняет большой объем навигационных видеоданных, при этом используется пространство памяти терминала, но сохраняется трафик данных терминала, поскольку запрашивание завершают локально и скорость обработки выше.
В одном из предпочтительных вариантов осуществления настоящего изобретения запрошенные навигационные видеоизображения отображаются пользователю, при этом пользователь выбирает то, какое из навигационных видеоизображений использовать, что обеспечивает более интеллектуальную навигацию и улучшенный опыт пользователя.
В еще одном варианте осуществления настоящего изобретения во время движения регулируют скорость воспроизведения навигационного видеоизображения на основе текущего значения скорости движения, так что скорость воспроизведения согласуется с текущим значением скорости движения. Картинка, которую видит пользователь, представляет собой картинку дороги в текущий момент времени, что обеспечивает более точную навигацию и улучшенный опыт пользователя.
В другом предпочтительном варианте осуществления настоящего изобретения возможна предварительная синхронизация навигационных данных, полученных из сети. В результате, когда навигацию осуществляют в режиме реального времени, отпадает необходимость в потреблении трафика данных. Операция синхронизации навигационных данных из сети может быть периодической, например, синхронизацию выполняют раз в неделю.
В раскрытом выше техническом решении, связанном с формированием навигационного видеоизображения, терминал используют для локальной съемки с натуральным движением, привязки навигационных параметров для формирования навигационного видеоизображения и отправки его в сервер сети. Таким образом, когда другой пользователь движется по той же самой дороге, указанное навигационное видеоизображение может быть использовано для навигации, что уменьшает время срабатывания карты и упрощает идентификацию для пользователя во время вождения. При этом предлагаемое техническое решение является более чувствительным к дорожным условиям и направлениям движения, что повышает точность навигации, а также улучшает опыт пользователя.
В одном из предпочтительных вариантов осуществления настоящего изобретения возможно повышение средней скорости движения в навигационных параметрах, так что при последующем согласовании навигационного видеоизображения точность согласования становится выше и, соответственно, повышается точность навигации.
Следует понимать, что и представленный выше раздел описания «Раскрытие изобретения», и нижеследующий подробный раздел описания «Осуществление изобретения» приведены лишь в качестве примера, при этом они не ограничивают настоящее изобретение.
Краткое описание чертежей
Прилагаемые чертежи, включенные в состав описания и образующие его часть, иллюстрируют предпочтительные варианты осуществления настоящего изобретения и совместно с настоящим описанием служат для пояснения принципов настоящего изобретения.
На фиг. 1 представлена блок-схема, иллюстрирующая способ навигации согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 2 представлена блок-схема, иллюстрирующая способ навигации согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 3 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 4 представлена блок-схема, иллюстрирующая способ навигации согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 5 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 6 представлена блок-схема, иллюстрирующая способ навигации согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 7 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 8 представлена блок-схема, иллюстрирующая способ навигации согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 9 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 10 представлена блок-схема, иллюстрирующая способ формирования навигационного видеоизображения согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 11 схематично показано устройство навигации согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 12 схематично показан определяющий модуль согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 13 схематично показан определяющий модуль согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 14 схематично показан определяющий модуль согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 15 схематично показан определяющий модуль согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 16 схематично показан навигационный модуль согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 17 схематично показан навигационный модуль согласно еще одному предпочтительному варианту осуществления настоящего изобретения.
На фиг. 18 схематично показано устройство навигации согласно другому предпочтительному варианту осуществления настоящего изобретения.
На фиг. 19 схематично показано устройство формирования навигационного видеоизображения согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 20 схематично показано устройство навигации или формирования навигационного видеоизображения согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 21 схематично показано устройство навигации согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
Осуществление изобретения
Далее, приведено подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Нижеследующее описание относится к прилагаемым чертежам, на которых одни и те же номера позиций на разных чертежах обозначают одинаковые или схожие элементы, если не указано иное. Реализации настоящего изобретения, изложенные в нижеследующем описании предпочтительных вариантов, не отражают все возможные реализации, предусмотренные настоящим изобретением. Наоборот, они представляют собой лишь примеры устройств и способов, соответствующих аспектам настоящего изобретения, заявленным в прилагаемой формуле изобретения.
Предпочтительные варианты осуществления настоящего изобретения обеспечивают навигацию пользователя посредством навигационного видеоизображения. Указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги. Каждое навигационное видеоизображение имеет соответствующие навигационные параметры, по меньшей мере содержащие: начальную навигационную точку и конечную навигационную точку, а также дополнительно содержащие: название региона, название дороги, время года, погодные условия, среднюю скорость движения и т.д. Пользователь запрашивает соответствующее навигационное видеоизображение путем введения навигационных параметров навигационного запроса, при этом навигационное видеоизображение воспроизводится на терминале. Благодаря навигации с реальным видеоизображением уменьшается время срабатывания карт и упрощается процесс идентификации для пользователя во время вождения, при этом предлагаемое техническое решение является более чувствительным к дорожным условиям и направлениям движения, что повышает точность навигации, а также улучшает опыт пользователя.
При этом пользователь может вводить начальную навигационную точку и конечную навигационную точку, или система глобального позиционирования (GPS) может автоматически определить текущее положение в виде начальной навигационной точки. Приведенные ниже навигационные параметры могут быть введены пользователем или могут быть получены автоматически посредством системы GPS, при этом указанные навигационные параметры могут содержать по меньшей мере один из следующих параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние.
На фиг. 1 показана блок-схема, иллюстрирующая способ навигации в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения. Указанный способ навигации используют в отношении терминала или сети. При этом указанный способ содержит следующие этапы S11 – S13.
На этапе S11 получают навигационный запрос.
На этапе S12 определяют навигационное видеоизображение, согласующееся с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги.
На этапе S13 осуществляют навигацию на основе указанного навигационного видеоизображения.
В рассматриваемом варианте, благодаря навигации с использованием реального видеоизображения удается уменьшить время срабатывания карт и упростить процесс идентификации для пользователя во время вождения. Кроме того, благодаря повышенной чувствительности к дорожным условиям и направлениям, предлагаемое изобретение обеспечивает более наглядную навигацию для пользователя, чтобы он не потерялся в сложной системе городских строений или на многочисленных перекрестках дорог, что повышает точность навигации, а также улучшает опыт пользователя.
В качестве альтернативы, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем этап S12 может быть реализован посредством трех последовательностей действий.
Последовательность действий № 1
На фиг. 2 представлена блок-схема, иллюстрирующая способ навигации согласно другому предпочтительному варианту осуществления настоящего изобретения. Как показано на фиг. 2, этап S12 предусматривает выполнение: этапа S21, на котором получают начальные навигационные точки и конечные навигационные точки навигационных видеоизображений; и выполнение этапа S22, на котором определяют навигационное видеоизображение, начальная навигационная точка и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В альтернативном варианте запрашивают соответствующее навигационное видеоизображение согласно начальной навигационной точке и конечной навигационной точке навигационного запроса и непосредственно сравнивают его с указанной начальной навигационной точкой и указанной конечной навигационной точкой навигационного видеоизображения, в результате чего получают навигационное видеоизображение, которое пользователь точно хочет запросить.
Последовательность действий № 2
На фиг. 3 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному предпочтительному варианту осуществления настоящего изобретения. Как показано на фиг. 3, этап S12 предусматривает выполнение: этапа S31, на котором вычисляют навигационный маршрут на основе указанной начальной навигационной точки и указанной конечной навигационной точки; выполнение этапа S32, на котором запрашивают навигационное видеоизображение, содержащее указанный навигационный маршрут, и выполнение этапа S33, на котором из указанного навигационного видеоизображения, содержащего навигационный маршрут, вырезают навигационное видеоизображение, соответствующее указанному навигационному маршруту, и определяют указанное навигационное видеоизображение, соответствующее навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
Например, указанная начальная навигационная точка и указанная конечная навигационная точка, запрашиваемые пользователем, представляют собой A и B, причем соответствующий навигационный маршрут представляет собой AB. При этом существует отснятое навигационное видеоизображение CD для навигационного маршрута CD (начальной навигационной точкой является точка C, а конечной навигационной точкой является точка D), причем указанный навигационный маршрут AB является участком указанного навигационного маршрута CD. Таким образом, из указанного навигационного видеоизображения CD можно вырезать навигационное видеоизображение, соответствующее указанному навигационному маршруту AB.
При этом навигационный параметр, соответствующий навигационному видеоизображению CD, включает в себя название дороги, которое соответствует навигационному маршруту AB или идентификацию места A и места B, причем направление движения между точкой A и точкой B соответствует направлению движения от A до B в навигационном видеоизображении CD. Таким образом, можно вырезать навигационное видеоизображение AB, соответствующее навигационному маршруту AB, из навигационного видеоизображения CD в соответствии с названием дороги, которое соответствует навигационному маршруту AB, или в соответствии с идентификацией места A и места B.
В качестве альтернативы, если запрашиваемая начальная навигационная точка находится близко к конечной точке, то, возможно, навигационное видеоизображение, полностью соответствующее требованиям пользователя, отсутствует, но при этом могут существовать навигационные видеоизображения, которые содержат навигационный маршрут и из которых может быть вырезано навигационное видеоизображение, соответствующее запрошенному маршруту. Таким образом, оно будет соответствовать навигационному видеоизображению, которое точно необходимо пользователю для повышения точности навигации.
Последовательность действий № 3
На фиг. 4 представлена блок-схема, иллюстрирующая способ навигации согласно другому предпочтительному варианту осуществления настоящего изобретения. Как показано на фиг. 4, этап S12 предусматривает выполнение: этапа S41, на котором вычисляют навигационный маршрут на основе указанной начальной навигационной точки и указанной конечной навигационной точки; выполнение этапа S42, на котором делят указанный навигационный маршрут по меньшей мере на два навигационных подмаршрута, выполнение этапа S43, на котором запрашивают навигационные видеоизображения, соответствующие указанным навигационным подмаршрутам, и выполнение этапа S44, на котором соединяют указанные навигационные видеоизображения, соответствующие навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и с указанной конечной навигационной точкой.
В качестве альтернативы, если запрошенная начальная точка находится далеко от конечной точки, то, возможно, отсутствует навигационное видеоизображение, полностью согласующееся с требованиями пользователя, но при этом могут существовать навигационные видеоизображения, соответствующие конкретному маршруту между начальной навигационной точкой и конечной навигационной точкой. Таким образом, можно соединить указанные навигационные видеоизображения для получения навигационного видеоизображения, которое запросил пользователь. Например, начальная навигационная точка и конечная навигационная точка, запрошенные пользователем, представляют собой точки A и B, причем соответствующим навигационным маршрутом является маршрут AB. При этом выполняют деление указанного навигационного маршрута на три навигационных подмаршрута AE, EF, EB. Далее, запрашивают навигационные видеоизображения AE, EF, EB, которые соответствуют указанным навигационным подмаршрутам, после чего соединяют три навигационных видеоизображения для получения навигационного видеоизображения AB, соответствующего указанному навигационному маршруту AB.
В качестве альтернативы, благодаря соединению навигационных видеоизображений, требуемых пользователю, можно получить навигационное видеоизображение, согласующееся с навигационным видеоизображением, которое точно необходимо пользователю для повышения точности навигации.
Для того чтобы повысить точность для согласования навигационного видеоизображения, можно увеличить условия вводимых параметров, например, ввести название региона, название дороги и т.д., при этом терминал может определять такие параметры, как время года и т.д., на основании текущей даты, и запрашивать параметры текущих погодных условий из сети, обнаруживать текущее значение скорости движения транспортного средства и т.д. Чем больше навигационных параметров в навигационном запросе, тем точнее навигационное видеоизображение, запрошенное в последний момент времени.
На фиг. 5 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному предпочтительному варианту осуществления настоящего изобретения. При этом указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние, причем в случае если путем запрашивания получают по меньшей мере два навигационных видеоизображения, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой, указанный этап S12 дополнительно содержит: этап S51, на котором получают навигационные параметры указанных навигационных видеоизображений, этап S52, на котором вычисляют степени согласования указанных навигационных параметров навигационного запроса с навигационными параметрами навигационных видеоизображений, и этап S53, на котором определяют навигационное видеоизображение, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определяют навигационные видеоизображения, степени согласования которых превышают предварительно заданное пороговое значение, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определяют предварительно заданное число навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
Например, существует три навигационных видеоизображения, согласующихся с конечной навигационной точкой A и конечной навигационной точкой B, причем они представляют собой соответственно «Видео1», «Видео2» и «Видео3».
Навигационный запрос дополнительно содержит следующие параметры: время года – лето, погодные условия – дождь, средняя скорость движения – 40 км/ч, название дороги – «Дорога А».
Навигационные параметры «Видео1», «Видео2» и «Видео3» представлены в таблице 1.
Таблица 1
(км/ч)
Из таблицы 1 видно, что степень согласования «Видео1» и навигационных параметров навигационного запроса является наибольшей, при этом определяют «Видео1» в качестве навигационного видеоизображения, запрошенного пользователем. Кроме того, можно предварительно определить принудительную доставку навигационного видеоизображения, степень согласования которого выше 50%, или навигационных видеоизображений, степень согласования которых представляет собой «top2», пользователю, при этом пользователь может выбрать, какое навигационное видеоизображение использовать.
Эффекты отснятого видеоизображения тесно связаны с факторами, такими как время года, погодные условия, скорость движения и т.д. Например, при съемке видеоизображения в 6 часов вечера, если съемка происходит летом, эффекты являются более четкими благодаря тому, что дневной свет по-прежнему яркий, если же съемка происходит зимой, то четко отснять удастся только здания с освещением и дорожные знаки, поскольку в это время суток уже темно. По аналогии, эффекты видеоизображения, отснятого при таких погодных условиях, как дождь, снег, туман и т.д., сильно отличаются от эффектов видеоизображения, отснятого в солнечный день. Кроме того, поскольку между начальной точкой и конечной точкой дороги могут отличаться, отснятое видеоизображение также будет различаться. Для того чтобы обеспечить более точное согласование навигационного видеоизображения для пользователя, необходимо учитывать как можно больше навигационных параметров.
В качестве альтернативного варианта, путем фильтрации запрошенных навигационных видеоизображений в соответствии с указанными параметрами можно обеспечить более точное навигационное видеоизображение, степень согласования которого является наибольшей, что необходимо пользователю для повышения точности навигации и улучшения опыта пользователя.
Согласно способу навигации, предложенному в предпочтительных вариантах осуществления настоящего изобретения, исполнительными органами для применения на практике указанного способа являются сервер для навигации и терминал с навигационной функцией. Терминал, используемый в настоящем изобретении, может представлять собой любое из устройств, обладающих функцией воспроизведения видеоизображения, например, мобильный телефон, компьютер, цифровой терминал рассылки, устройство приема и передачи сообщений, игровую приставку, планшет, персональный цифровой помощник или другое подобное устройство.
Рассматриваемый вариант осуществления настоящего изобретения обеспечивает два следующих варианта навигации в зависимости от исполнительных органов.
Сеть
На фиг. 6 показана блок-схема, иллюстрирующая способ навигации согласно еще одному варианту осуществления настоящего изобретения. Как показано на фиг. 6, указанный способ содержит следующие этапы: этап S61, на котором сервер получает навигационный запрос, отправленный терминалом, этап S62, на котором сервер определяет навигационное видеоизображение, согласующееся с указанным навигационным запросом, и этап S63, на котором сервер отправляет указанное навигационное видеоизображение в терминал, при этом указанный терминал воспроизводит указанное видеоизображение пользователю для выполнения навигации.
В качестве альтернативы, если операция согласования навигационного видеоизображения на основе указанного навигационного запроса остановлена сервером в сети, серверу необходимо принудительно доставить навигационное видеоизображение, которое было согласовано, в терминал, использованный для выполнения запроса. Таким образом, можно хранить навигационные видеоданные, не используя большое пространство памяти, но при этом потребляя конкретный трафик данных.
Терминал
На фиг. 7 представлена блок-схема, иллюстрирующая способ навигации согласно другому варианту осуществления настоящего изобретения. При этом как показано на фиг. 7, указанный способ содержит следующие этапы: этап S71, на котором терминал получает навигационный запрос, введенный пользователем, этап S72, на котором терминал определяет навигационное видеоизображение, согласующееся с указанным навигационным запросом, и этап S73, на котором терминал воспроизводит навигационное видеоизображение для обеспечения навигации.
В качестве альтернативы, если операция согласования навигационного видеоизображения на основе указанного навигационного запроса остановлена терминалом, то указанный терминал предварительно сохраняет большой объем навигационных видеоданных, при этом используется пространство памяти терминала, но сохраняется трафик данных терминала, поскольку запрашивание завершают локально и скорость обработки выше.
При этом не имеет значения, сервер или терминал согласует навигационное видеоизображение, если навигационное видеоизображение, которое было согласовано, составляет несколько часов, причем пользователь может выбрать, когда терминал будет воспроизводить навигационное видеоизображение.
На фиг. 8 представлена блок-схема, иллюстрирующая способ навигации согласно еще одному варианту осуществления настоящего изобретения. Как показано на фиг. 8, в случае когда определяют по меньшей мере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, выполняют следующие этапы: этап S81, на котором упорядочивают и отображают навигационное видеоизображение, согласующееся с указанным навигационным запросом, этап S82, на котором принимают от пользователя команду на выбор одного из навигационных видеоизображения, и этап S83, на котором воспроизводят выбранное навигационное видеоизображение.
В качестве альтернативы, запрошенные навигационные видеоизображения отображают для пользователя, при этом пользователь выбирает, какое из навигационных видеоизображений использовать для обеспечения более интеллектуальной навигации и улучшения опыта пользователя.
Для того чтобы улучшить эффекты навигации, регулируют скорость воспроизведения навигационного видеоизображения на основе скорости движения во время вождения.
На фиг. 9 показана блок-схема, иллюстрирующая способ навигации согласно еще одному варианту осуществления настоящего изобретения. Как показано на фиг. 9, выполняют следующие этапы: этап S91, на котором получают текущее значение скорости движения, этап S92, на котором определяют скорость воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения, и этап S93, на котором воспроизводят навигационное видеоизображение с указанной скоростью воспроизведения.
В качестве альтернативы, регулируют скорость воспроизведения навигационного видеоизображения на основе текущего значения скорости движения во время вождения, например, когда пользователь замедляет движение, скорость воспроизведения навигационного видеоизображения также уменьшается; когда пользователь останавливается, воспроизведение навигационного видеоизображения также прекращается; когда пользователь ускоряется, скорость воспроизведения навигационного видеоизображения также повышается. Таким образом, скорость воспроизведения согласована с текущей скоростью движения. Картинка, которую видит пользователь, представляет собой картинку дороги в текущий момент времени, что обеспечивает более точную навигацию и улучшенный опыт пользователя.
В еще одном предпочтительном варианте осуществления настоящего изобретения, указанный способ дополнительно предусматривает: синхронизацию навигационных данных из сети, причем указанные навигационные данные содержат навигационное видеоизображение, и сохранение указанных навигационных данных в локальной навигационной базе данных. На раскрытом выше этапе S72 запрашивают навигационное видеоизображение, согласующееся с указанным навигационным запросом, из указанной локальной навигационной базы данных.
В качестве альтернативного варианта, можно предварительно синхронизировать навигационные данные из сети, например, посредством Wi-Fi, пользователь загружает навигационное видеоизображение текущего города или необходимого региона, так что при навигации в режиме реального времени, пользователю не придется больше тратить трафик данных. Операция синхронизации навигационных данных из сети может быть периодической, например синхронизацию выполняют один раз в неделю.
Далее приведено описание различных вариантов осуществления способа формирования навигационного видеоизображения, причем указанный способ применяют в отношении терминала. Терминал, используемый в настоящем изобретении, может представлять собой любое из устройств, обладающих функцией записи видеоизображения, например мобильный телефон, компьютер, цифровой терминал рассылки, устройство приема и передачи сообщений, игровую приставку, планшет, персональный цифровой помощник, тахограф или другое подобное устройство.
На фиг. 10 представлена блок-схема, иллюстрирующая способ формирования навигационного видеоизображения согласно одному из предпочтительных вариантов осуществления настоящего изобретения. Как показано на фиг. 10, указанный способ содержит следующие этапы: этап S101, на котором получают навигационные параметры, введенные пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конченую навигационную точку, этап S102, на котором осуществляют натурную съемку дороги для получения отснятого видеоизображения, причем съемку останавливают при достижении указанной конечной навигационной точки, этап S103, на котором осуществляют привязку указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения, и этап S104, на котором загружают указанное навигационное видеоизображение в сеть.
В рассматриваемом варианте терминал используют для локальной съемки с натуральным движением, привязки навигационных параметров для формирования навигационного видеоизображения и отправки его на сервер в сети. Таким образом, когда другой пользователь едет по той же самой дороге, указанное навигационное видеоизображение может быть использовано для навигации, при этом уменьшается время срабатывания карт и упрощается процесс идентификации для пользователя во время движения. Кроме того, предлагаемое техническое решение является более чувствительным к погодным условиям и направлениям движения, что повышает точность навигации и улучшает опыт пользователя.
В качестве альтернативы, указанный способ дополнительно предусматривает запись значений скорости движения и вычисление средней скорости движения на основе указанных значений скорости движения, причем указанный этап S103 дополнительно предусматривает: принятие указанной средней скорости движения в качестве навигационного параметра для его привязки к отснятому видеоизображению.
В качестве альтернативного варианта, возможно увеличение скорости движения в навигационных параметрах, в результате чего при последующем согласовании навигационного видеоизображения, точность согласования увеличивается, а точность навигации повышается.
Кроме того, указанный терминал может быть выполнен с возможностью записи такого навигационного параметра, как расстояние, соответствующее навигационному видеоизображению, для последующего запрашивания точного согласования.
Ниже раскрыты предпочтительные варианты осуществления устройства, посредством которого можно реализовать предлагаемый в настоящем изобретении способ.
На фиг. 11 схематично показано устройство навигации согласно одному из предпочтительных вариантов осуществления настоящего изобретения. Указанное устройство может быть применено в виде цельного устройства или как часть электрического устройства с использованием аппаратных средств, программных средств или любой их комбинации. Как показано на фиг. 11, указанное устройство навигации содержит: принимающий модуль 111, выполненный с возможностью получения навигационного запроса, определяющий модуль 112, выполненный с возможностью определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, и навигационный модуль 113, выполненный с возможностью осуществления навигации на основе указанного навигационного видеоизображения.
На фиг. 12 схематично показан определяющий модуль согласно одному из предпочтительных вариантов осуществления настоящего изобретения. Как показано на фиг. 12, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем указанный определяющий модуль 112 содержит: первый принимающий подмодуль 121, выполненный с возможностью получения начальных навигационных точек и конечных навигационных точек навигационных видеоизображений, определяющий подмодуль 122, выполненный с возможностью определения навигационного видеоизображения, начальная навигационная точка и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
На фиг. 13 схематично показан определяющий модуль согласно еще одному варианту осуществления настоящего изобретения. Как показано на фиг. 13, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем указанный определяющий модуль 112 содержит: первый вычислительный подмодуль 131, выполненный с возможностью вычисления навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, запрашивающий подмодуль 132, выполненный с возможностью запрашивания навигационного видеоизображения, содержащего указанный навигационный маршрут, и вырезающий подмодуль 133, выполненный с возможностью вырезания из указанного навигационного видеоизображения, содержащего навигационный маршрут, навигационного видеоизображения, которое соответствует указанному навигационному маршруту, и определения указанного навигационного видеоизображения, соответствующего навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
На фиг. 14 схематично показан определяющий модуль согласно другому варианту осуществления настоящего изобретения. Как показано на фиг. 14, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем указанный определяющий модуль 112 содержит: первый вычислительный подмодуль 131, выполненный с возможностью вычисления навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, делительный подмодуль 142, выполненный с возможностью деления навигационного маршрута по меньшей мере на два навигационных подмаршрута, запрашивающий подмодуль 143, выполненный с возможностью запрашивания навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам, и соединительный подмодуль 144, выполненный с возможностью соединения указанных навигационных видеоизображений, соответствующих навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
На фиг. 15 схематично показан определяющий модуль согласно одному из вариантов осуществления настоящего изобретения. Как показано на фиг. 15, указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние, причем указанный определяющий модуль дополнительно содержит: второй принимающий подмодуль 151, который, в случае когда путем запрашивания получено по меньшей мере два навигационных видеоизображения, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой; второй вычислительный подмодуль 152, выполненный с возможностью вычисления степеней согласования указанных навигационных параметров навигационного запроса с навигационными параметрами навигационных видеоизображений, причем указанный определяющий подмодуль 122 выполнен с возможностью определения навигационного видеоизображения, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определения навигационных видеоизображений, степени согласования которых превышают предварительно заданное пороговое значение, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определения предварительно заданного числа навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
В качестве альтернативы, в случае применения указанного устройства в отношении сети, указанный навигационный модуль выполнен с возможностью отправки указанного навигационного видеоизображения в терминал для его воспроизведения.
В качестве альтернативы, в случае применения указанного устройства в отношении терминала, указанный навигационный модуль выполнен с возможностью воспроизведения указанного навигационного видеоизображения.
На фиг. 16 схематично показан навигационный модуль согласно одному из вариантов осуществления настоящего изобретения. Как показано на фиг. 16 указанный навигационный модуль 113 содержит: отображающий подмодуль 161, который, в случае когда определено по меньшей мере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, выполнен с возможностью упорядочивания и отображения навигационных видеоизображений, согласующихся с указанным навигационным запросом, приемный подмодуль 162, выполненный с возможностью приема от пользователя команды на выбор одного из навигационных видеоизображений, и воспроизводящий подмодуль 163, выполненный с возможностью воспроизведения выбранного навигационного видеоизображения.
На фиг. 17 схематично показан навигационный модуль согласно еще одному предпочтительному варианту осуществления настоящего изобретения. Как показано на фиг. 17, указанный навигационный модуль 113 содержит: принимающий подмодуль 171, выполненный с возможностью получения текущего значения скорости движения, определяющий подмодуль 172, выполненный с возможностью определения скорости воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения, и воспроизводящий подмодуль 173, выполненный с возможностью воспроизведения навигационного видеоизображения с указанной скоростью воспроизведения.
На фиг. 18 схематично показано устройство навигации согласно другому предпочтительному варианту осуществления настоящего изобретения. Как показано на фиг. 18, указанное устройство содержит: синхронизирующий модуль 114, выполненный с возможностью синхронизации навигационных данных из сети в случае применения указанного устройства в отношении терминала, причем указанные навигационные данные содержат навигационное видеоизображение, запоминающий модуль 115, выполненный с возможностью хранения указанных навигационных данных в локальной навигационной базе данных, причем указанный определяющий модуль 112 выполнен с возможностью запрашивания навигационного видеоизображения, согласующегося с указанным навигационным запросом, из указанной локальной навигационной базы данных.
На фиг. 19 схематично показано устройство формирования навигационного видеоизображения согласно одному из предпочтительных вариантов осуществления настоящего изобретения. Как показано на фиг. 19, указанное устройство содержит принимающий модуль 191, выполненный с возможностью получения навигационных параметров, введенных пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конечную навигационную точку, модуль 192 съемки, выполненный с возможностью натурной съемки дороги для получения отснятого видеоизображения, причем обеспечена возможность остановки съемки при достижении указанной конечной навигационной точки, модуль 193 привязки, выполненный с возможностью привязки указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения, и загрузочный модуль 194, выполненный с возможностью загрузки указанного навигационного видеоизображения в сеть.
Как показано на фиг. 19, указанное устройство дополнительно содержит: записывающий модуль 195, выполненный с возможностью записи значений скорости движения, и вычислительный модуль 196, выполненный с возможностью вычисления средней скорости движения на основе указанных значений скорости движения, причем указанный модуль 193 привязки выполнен с возможностью принятия указанной средней скорости движения в качестве навигационного параметра для его привязки к отснятому видеоизображению.
В настоящем изобретении также предложено устройство навигации, содержащее: процессор и запоминающее устройство, предназначенное для хранения инструкций, исполняемых указанным процессором, причем указанный процессор выполнен с возможностью получения навигационного запроса, определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, и осуществления навигации на основе указанного навигационного видеоизображения.
В настоящем изобретении также раскрыто устройство формирования навигационного видеоизображения, содержащее: процессор и запоминающее устройство, предназначенное для хранения инструкций, исполняемых указанным процессором, причем указанный процессор выполнен с возможностью получения навигационных параметров, введенных пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конечную навигационную точку, осуществления натурной съемки дороги для получения отснятого видеоизображения, причем предусмотрена возможность остановки съемки при достижении указанной конечной навигационной точки, привязки указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения и загрузки указанного навигационного видеоизображения в сеть.
Что касается раскрытых выше устройств, то конкретные действия и функциональные возможности соответствующих модулей подробно описаны со ссылкой на соответствующие способы в раскрытых выше вариантах осуществления настоящего изобретения, и поэтому не будут подробно раскрыты здесь.
На фиг. 20 схематично проиллюстрировано устройство навигации или формирования навигационного видеоизображения согласно одному из предпочтительных вариантов осуществления настоящего изобретения, причем указанное устройство пригодно для использования в терминальном устройстве. Например, указанное устройство 2000 может представлять собой видеокамеру, записывающее устройство, мобильный телефон, компьютер, цифровой терминал рассылки, устройство приема и передачи сообщений, игровую приставку, планшет, медицинское устройство, тренажерное оборудование, персональный цифровой помощник или другое подобное устройство.
Указанное устройство 2000 может содержать один или несколько из следующих компонентов: обрабатывающий компонент 2002, запоминающее устройство 2004, компонент 2006 питания, мультимедийный компонент 2008, аудио-компонент 2010, интерфейс 2012 ввода/вывода, сенсорный компонент 2014 и коммуникационный компонент 2016.
Указанный обрабатывающий компонент 2002, как правило, обеспечивает управление всеми операциями указанного устройства 2000, например, операциями, связанными с отображением информации, телефонными звонками, передачей данных, функционированием видеокамеры и записывающими операциями. Указанный обрабатывающий компонент 2002 может содержать один или несколько процессоров 2020 для исполнения инструкций и выполнения всех или некоторых из этапов раскрытых выше способов. Кроме того, указанный обрабатывающий компонент 2002 может содержать один или несколько модулей, обеспечивающих взаимодействие между указанным обрабатывающим компонентом 2002 и другими компонентами. Например, указанный обрабатывающий компонент 2002 может содержать мультимедийный модуль, обеспечивающий взаимодействие между указанным мультимедийным компонентом 2008 и указанным обрабатывающим компонентом 2002.
Указанное запоминающее устройство 2004 выполнено с возможностью хранения различных типов данных для поддержания функционирования указанного устройства 2000. К указанным данным относятся, например, инструкции для любого приложения или способа, выполняемого в устройстве 2000, контактная информация, телефонный справочник, сообщения, картинки, видео и т.д. Указанное запоминающее устройство 2004 может быть реализовано с использованием любого типа из энергозависимых или энергонезависимых запоминающих устройств, или их комбинации, например статистического запоминающего устройства с произвольной выборкой СЗУПВ (SRAM), электрически стираемого программируемого постоянного запоминающего устройства ЭСППЗУ (EEPROM), стираемого программируемого постоянного запоминающего устройства СППЗУ (EPROM), программируемого постоянного запоминающего устройства ППЗУ (PROM), постоянного запоминающего устройства ПЗУ (ROM), магнитного запоминающего устройства, флэш-памяти, магнитного или оптического диска.
Указанный компонент 2006 питания обеспечивает подачу питания к различным компонентам устройства 2000. При этом указанный компонент 2006 питания может содержать систему управления энергопотреблением, один или несколько источников питания и любые другие компоненты, связанные с генерированием, управлением и распределением электроэнергии в устройстве 2000.
Указанный мультимедийный компонент 2008 содержит экран, обеспечивающий выводной интерфейс между устройством 2000 и пользователем. В некоторых вариантах осуществления настоящего изобретения указанный экран содержит жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если указанный экран содержит сенсорную панель, то экран может быть реализован в виде сенсорного экрана для получения входных сигналов от пользователя. Указанная сенсорная панель содержит один или несколько контактных датчиков для обнаружения прикосновений, скользящих движений пальца и жестов по сенсорной панели. Контактные датчики могут не только обнаруживать границы прикосновения или скользящего движения пальца, но также обнаруживать период времени или давление, связанные с прикосновением или скользящим движением пальца. В некоторых вариантах осуществления настоящего изобретения указанный мультимедийный компонент 2008 содержит фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера могут получать внешние мультимедийные данные, когда устройство 2000 находится в рабочем режиме, например режиме фотографирования или в режиме видеосъемки. Каждая из указанных камер, то есть указанная фронтальная камера и указанная задняя камера, может представлять собой фиксированную систему оптических линз или иметь возможность оптической фокусировки и изменения масштаба изображения.
Указанный аудио-компонент 2010 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, указанный аудио-компонент 2010 содержит микрофон («MIC»), выполненный с возможностью получения внешнего аудиосигнала, когда указанное устройство 2000 находится в рабочем режиме, например в режиме звонка, в режиме записи или в режиме распознавания голоса. Полученный аудиофайл может далее быть сохранен в запоминающем устройстве 2004 или передан через коммуникационный компонент 2016. В некоторых вариантах осуществления настоящего изобретения указанный аудио-компонент 2010 дополнительно содержит громкоговоритель для вывода аудиосигналов.
Указанный интерфейс 2012 ввода/вывода обеспечивает интерфейс между обрабатывающим компонентом 2002 и периферическими интерфейсными модулями, причем указанные интерфейсные модули представляют собой, например, клавиатуру, сенсорное колесо с предусмотренными на нем кнопками, кнопки и другие подобные элементы. К указанным кнопкам относятся, помимо прочего, кнопка возврата в исходное положение, кнопка регулирования громкости, кнопка включения и кнопка блокировки.
Указанный сенсорный компонент 2014 содержит один или несколько датчиков для обеспечения оценки состояния различных аспектов указанного устройства 2000. Например, указанный сенсорный компонент 2014 выполнен с возможностью обнаружения состояния включен/выключен указанного устройства 2000, относительного позиционирования компонентов (например, дисплея и клавиатуры устройства 2000), изменения положения устройства 2000 или компонентов устройства 2000, наличия или отсутствия контакта пользователя с устройством 2000, ориентации или ускорения/замедления устройства 2000 и изменения температуры устройства 2000. Указанный сенсорный компонент 2014 может содержать датчик приближения, выполненный с возможностью обнаружения наличия объекта на близком расстоянии без какого-либо физического контакта. Указанный сенсорный компонент 2014 может также содержать светочувствительный датчик, например, датчик изображения на комплементарной структуре «металл-оксид-полупроводник» (КМОП-структуре) или датчик изображения на приборе с зарядовой связью (ПЗС), для использования в приложениях редактирования изображений. В некоторых вариантах осуществления настоящего изобретения указанный сенсорный компонент 2014 может также содержать датчик ускорения, гиродатчик, магнитный датчик давления или температурный датчик.
Указанный коммуникационный компонент 2016 выполнен с возможностью обеспечения проводной или беспроводной передачи данных между устройством 2000 и другими устройствами. Указанное устройство 2000 может получить доступ к беспроводной сети на основании стандартов связи, например, WiFi, 2G или 3G, или их комбинации. В одном из предпочтительных вариантов осуществления настоящего изобретения указанный коммуникационный компонент 2016 получает сигнал оповещения или информацию, связанную с оповещением, от внешней системы управления оповещением через широковещательный канал. В одном из предпочтительных вариантов осуществления настоящего изобретения указанный коммуникационный компонент 2016 дополнительно содержит модуль беспроводной связи ближнего радиуса действия (NFC-модуль) для обеспечения связи малого покрытия. Например, указанный NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии передачи данных в инфракрасном диапазоне (IrDA), сверхширокополостной (UWB) технологии, технологи Bluetooth (BT) и другой технологии.
В одном из предпочтительных вариантов осуществления настоящего изобретения указанное устройство 2000 может быть реализовано посредством одной или нескольких специализированных интегральных микросхем (ASIC), процессоров цифровой обработки сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров или других электронных компонентов, для выполнения раскрытых выше способов.
В одном из предпочтительных вариантов осуществления настоящего изобретения также предусмотрен энергонезависимый машиночитаемый носитель данных, содержащий инструкции, например, содержащиеся в запоминающем устройстве 2004, и исполняемые указанным процессором 2020 в устройстве 2000, для выполнения раскрытых выше способов. Например, указанный энергонезависимый машиночитаемый носитель данных может представлять собой постоянное запоминающее устройство ПЗУ (ROM), оперативное запоминающее устройство ОЗУ (RAM), ПЗУ на компакт-диске, устройство магнитного типа, дискету, оптическое запоминающее устройство или другое подобное устройство.
На фиг. 21 схематично показано устройство навигации согласно одному из предпочтительных вариантов осуществления настоящего изобретения. Например, указанное устройство 2100 может представлять собой сервер. Указанное устройство содержит обрабатывающий компонент 2122 (например, один или несколько процессоров), и ресурс памяти, представленный запоминающим устройством 2132, используемым для хранения инструкций, исполняемых указанным обрабатывающим компонентом 2122, например приложения. Приложение, хранящееся в указанном запоминающем устройстве 2132, содержит один или несколько модулей, соответствующих указанным инструкциям. Кроме того, указанный обрабатывающий компонент 2122 выполнен с возможностью исполнения инструкций, для реализации раскрытого выше способа.
Указанное устройство 2100 может также содержать источник 2126 электропитания, выполненный с возможностью реализации управления электропитанием устройства 2100, проводные и беспроводные сетевые интерфейсы, выполненные с возможностью подсоединения указанного устройства 900 к сети, и интерфейс 2158 ввода/вывода. Указанное устройство 2100 может функционировать на основе операционных систем, хранящихся в указанном запоминающем устройстве 2132, например, систем Windows ServerTM, Mac OS XTM, UnixTM, LinuxTM, FreeBSDTM и т.д.
Предусмотрен энергонезависимый машиночитаемый носитель данных, в котором хранятся инструкции, причем при исполнении указанных инструкций посредством процессора устройства 2000, указанное устройство реализует раскрытый выше способ формирования навигационного видеоизображения, при котором: получают навигационные параметры, введенные пользователем, причем указанные навигационные параметры содержат начальную навигационную точку и конечную навигационную точку, осуществляют натурную съемку дороги, причем съемку останавливают при достижении указанной конечной навигационной точки для получения отснятого видеоизображения, осуществляют привязку указанных навигационных параметров к указанному отснятому видеоизображению для получения навигационного видеоизображения и загружают указанное навигационное видеоизображение в сеть.
В качестве альтернативы, указанный способ дополнительно предусматривает: запись значения скорости движения, вычисление средней скорости движения на основе указанного значения скорости движения, причем привязка навигационных параметров к отснятому видеоизображению предусматривает принятие указанной средней скорости движения в качестве навигационного параметра для его привязки к отснятому видеоизображении.
Предусмотрен энергонезависимый машиночитаемый носитель данных, в котором хранятся инструкции, причем при исполнении указанных инструкций посредством процессора устройства 2000 или процессора 2100, указанное устройство 2000 или указанное устройство 2100 реализует раскрытый выше способ навигации, при котором: получают навигационный запрос, определяют навигационное видеоизображение, согласующееся с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, и осуществляют навигацию на основе указанного навигационного видеоизображения.
В одном из предпочтительных вариантов осуществления настоящего изобретения, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем определение навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает: получение начальных навигационных точек и конечных навигационных точек навигационных видеоизображений, определение навигационного видеоизображения, начальная навигационная точка и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В другом предпочтительном варианте осуществления настоящего изобретения, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем определение навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает: вычисление навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, запрашивание навигационного видеоизображения, содержащего указанный навигационный маршрут, вырезание из указанного навигационного видеоизображения, содержащего навигационный маршрут, навигационного видеоизображения, которое соответствует указанному навигационному маршруту, и определение указанного навигационного видеоизображения, соответствующего навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
В альтернативном варианте осуществления настоящего изобретения, указанный навигационный запрос содержит навигационные параметры начальной навигационной точки и конечной навигационной точки, причем определение навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает: вычисление навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки, деление указанного навигационного маршрута по меньшей мере на два навигационных подмаршрута, запрашивание навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам, и соединение указанных навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и с указанной конечной навигационной точкой.
В еще одном предпочтительном варианте осуществлении настоящего изобретения, указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, средняя скорость движения и расстояние, причем в случае когда путем запрашивания получают по меньшей мере два навигационных видеоизображений, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой, определение навигационного видеоизображения, согласующегося с указным навигационным запросом дополнительно предусматривает: получение навигационных параметров указанных навигационных видеоизображений, вычисление степеней согласования указанных навигационных параметров навигационного запроса с навигационными параметрами навигационных видеоизображений, и определение навигационного видеоизображения, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определения навигационных видеоизображений, степени согласования которых превышают предварительно заданного порогового значения, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определения предварительно заданного числа навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
В другом предпочтительном варианте осуществления настоящего изобретения, в случае применения указанного способа в отношении сети, этап осуществления навигации на основе навигационного видеоизображения предусматривает отправку указанного навигационного видеоизображения в терминал для его воспроизведения.
В альтернативном варианте осуществления настоящего изобретения, в случае применения указанного способа в отношении терминала, этап осуществления навигации на основе навигационного видеоизображения предусматривает: воспроизведение указанного навигационного видеоизображения.
В еще одном предпочтительном варианте осуществления настоящего изобретения, в случае когда определяют по меньшей мере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, этап осуществления навигации на основе навигационного видеоизображения предусматривает: упорядочивание и отображение навигационных видеоизображений, согласующихся с указанным навигационным запросом, прием от пользователя команды на выбор одного из указанных навигационных видеоизображений, и воспроизведение выбранного навигационного видеоизображения.
В другом варианте осуществления настоящего изобретения, этап осуществления навигации на основе навигационного видеоизображения предусматривает: получение текущего значения скорости движения, определение скорости воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения, и воспроизведение навигационного изображения с указанной скоростью воспроизведения.
В альтернативном варианте осуществления настоящего изобретения, в случае применения указанного способа в отношении терминала, указанный способ предусматривает синхронизацию навигационных данных из сети, причем указанные навигационные данные содержат навигационное видеоизображение, сохранение указанных навигационных данных в локальной навигационной базе данных, причем определение навигационного видеоизображения, согласующегося с указанным навигационным запросом, предусматривает: запрашивание навигационного видеоизображения, согласующегося с указанным навигационным запросом, из указанной локальной навигационной базы данных.
Другие предпочтительные варианты осуществления настоящего изобретения станут очевидными специалистам в данной области техники при изучении настоящего описания и при реализации на практике раскрытых в настоящем документе технических решений. Предполагается, что данная заявка охватывает любые вариации, варианты применения и модификации настоящего описания в соответствии с основными принципами настоящего изобретения и включает в себя такие отступления от настоящего описания, которые подпадают под известную или общепринятую практику в данной области техники. Предполагается, что описание и варианты, рассмотренные исключительно в качестве примерных, в истинном объеме изложены в прилагаемой формуле изобретения.
Следует понимать, что идея изобретения не ограничена конкретной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что в настоящее изобретение могут быть внесены различные модификации и изменения, не выходящие за пределы объема настоящего изобретения. Предполагается, что объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
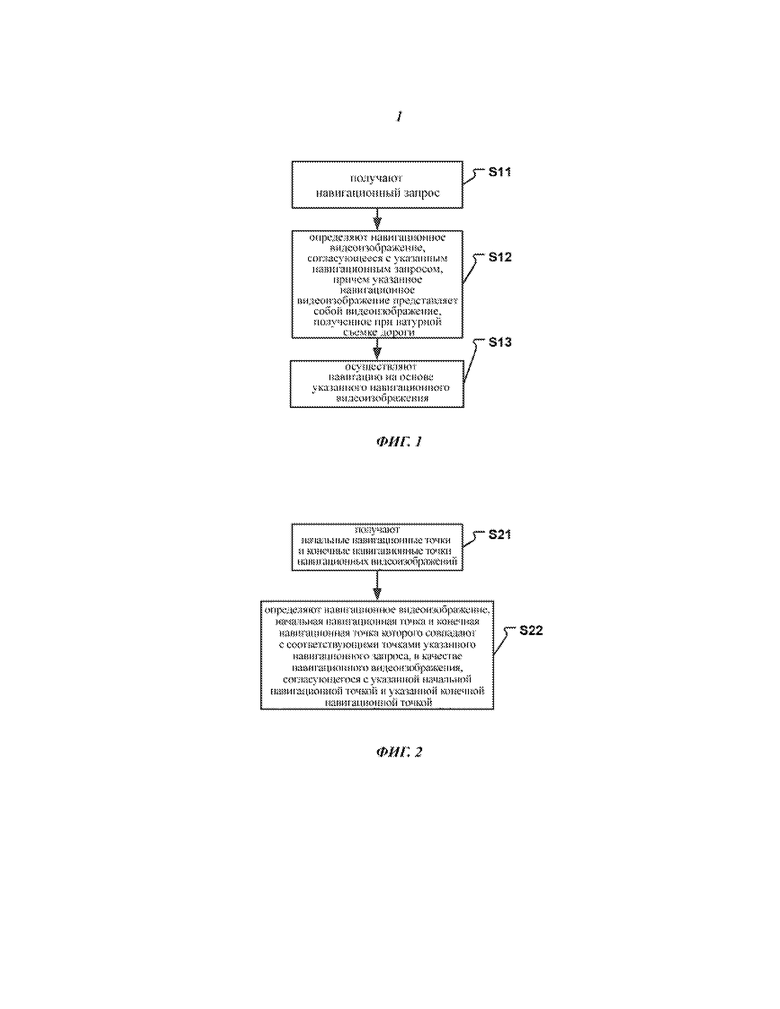



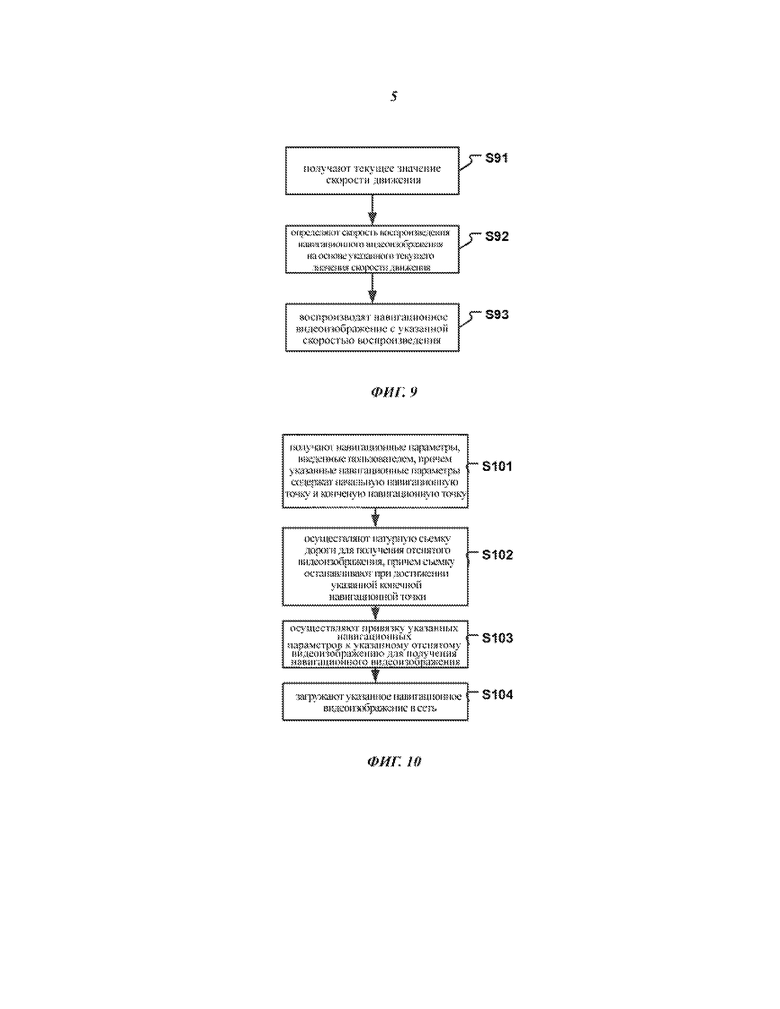
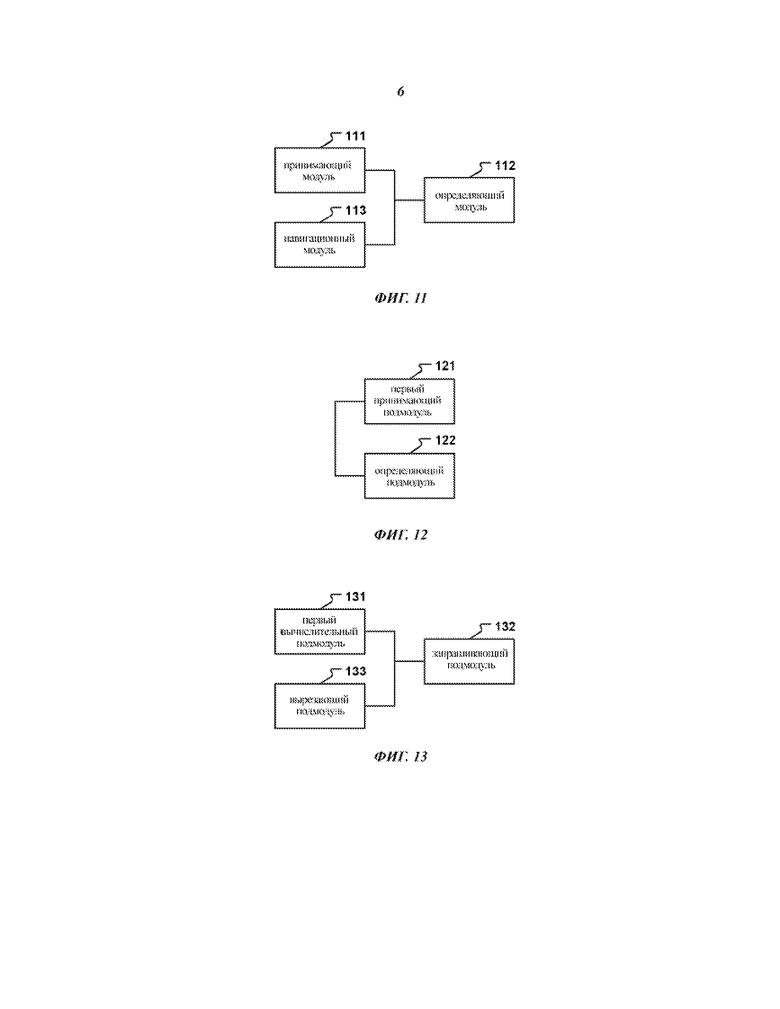


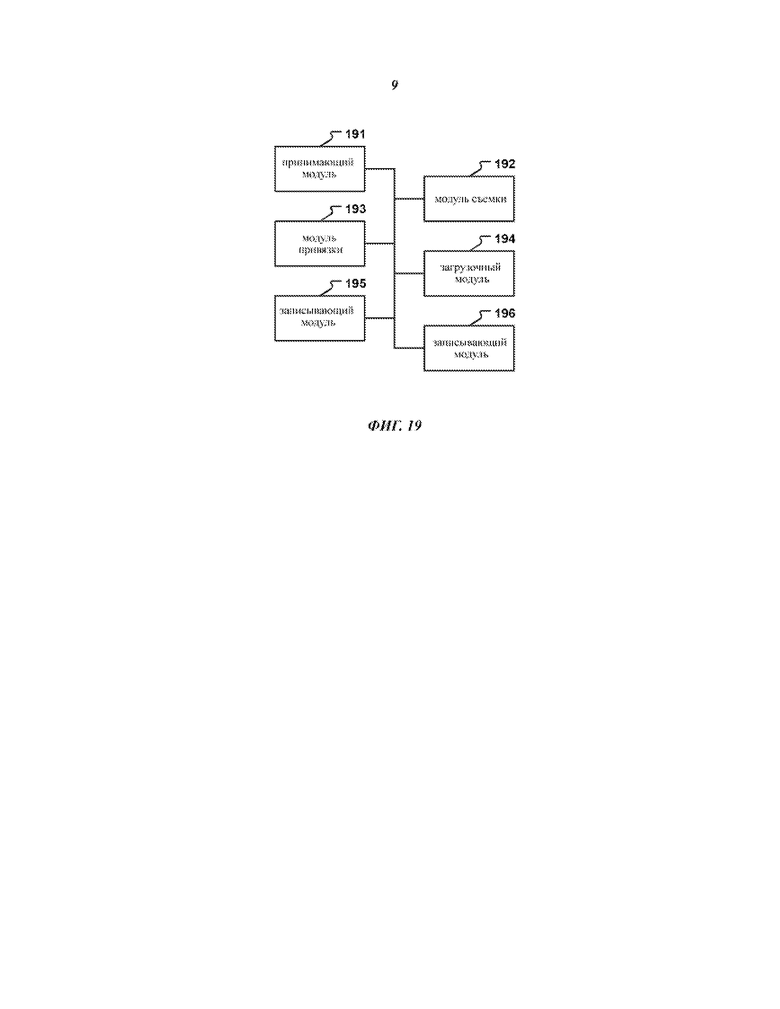
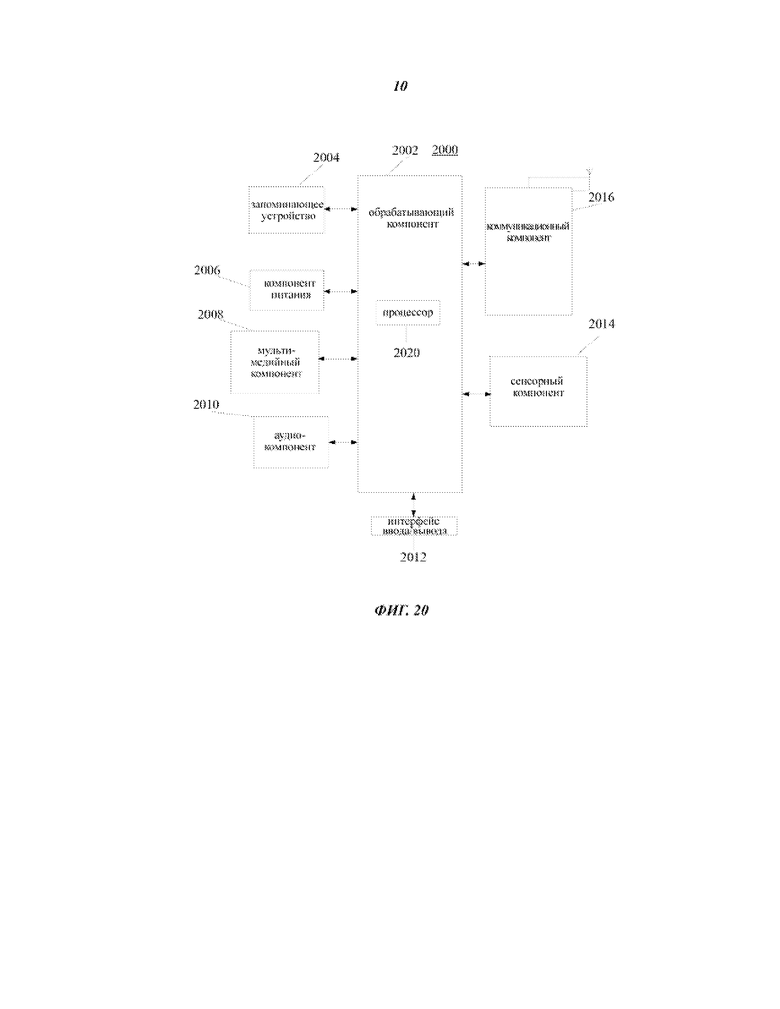
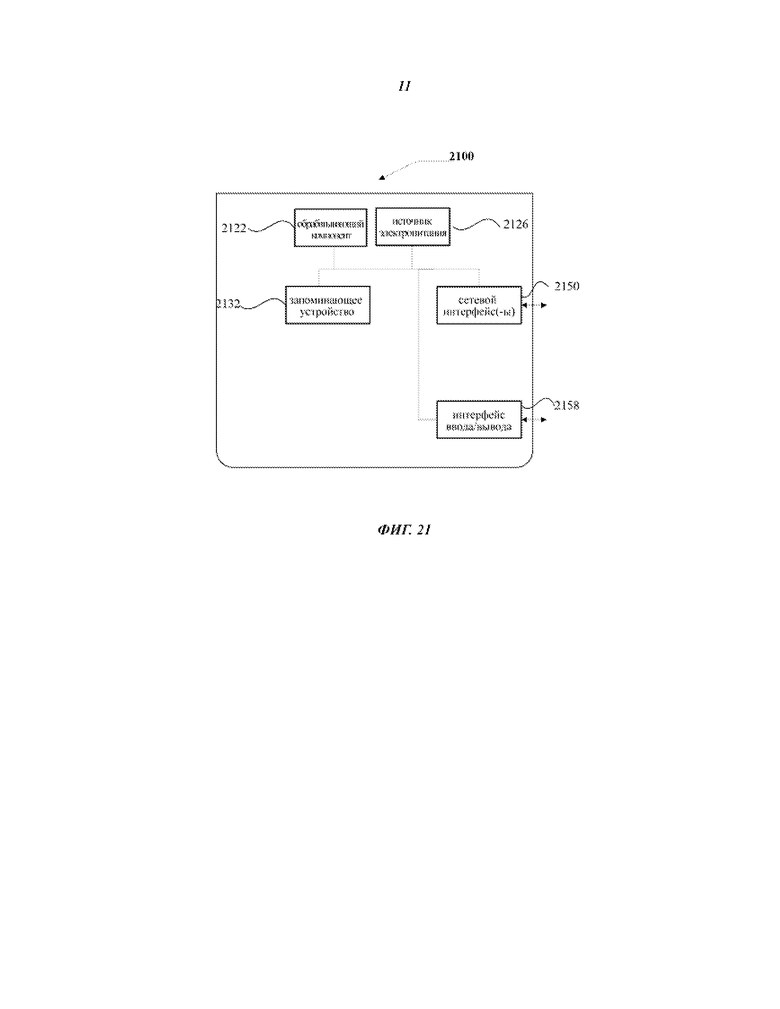
Изобретение относится к области навигационного приборостроения и может найти применение в системах навигации при формировании навигационного видеоизображения. Технический результат – расширение функциональных возможностей. Для этого осуществляется аппаратно-программная поддержка следующих этапов: получают навигационный запрос, определяют навигационное видеоизображение, согласующееся с указанным навигационным запросом, причем указанное навигационное видеоизображение представляет собой видеоизображение, полученное при натурной съемке дороги, в результате осуществляют навигацию на основе указанного навигационного видеоизображения, согласующегося с указанным навигационным запросом, определяющий подмодуль устройства навигации выполнен с возможностью определения навигационного видеоизображения. При этом начальная навигационная точка и конечная навигационная точка совпадают с соответствующими точками указанного навигационного запроса, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой. 3 н. и 18 з.п. ф-лы, 21 ил., 1 табл.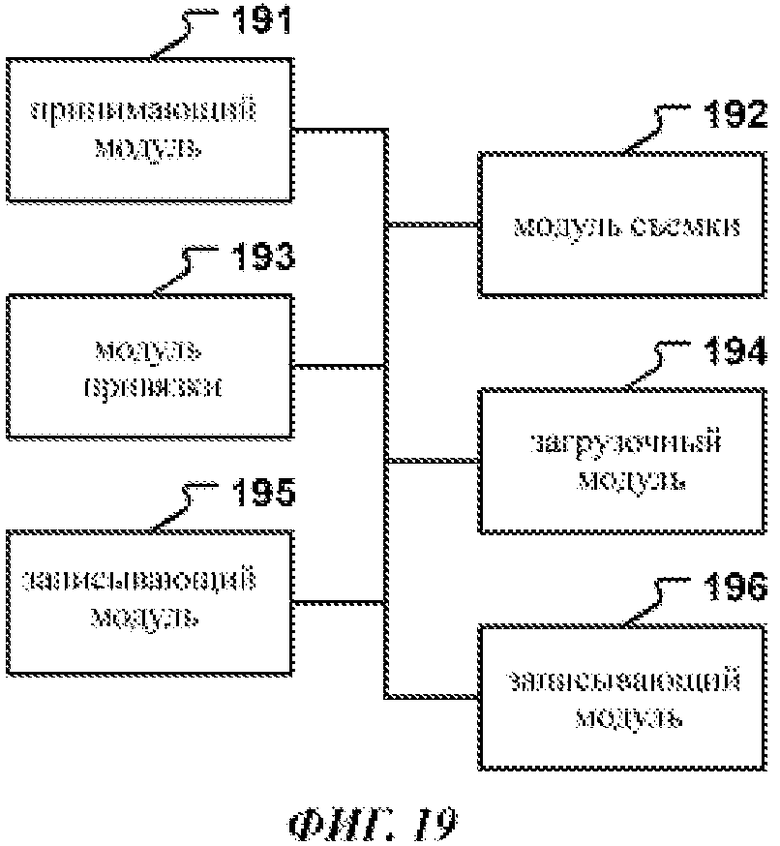
1. Способ навигации, содержащий следующие этапы:
получают навигационный запрос, содержащий навигационные параметры начальной навигационной точки и конечной навигационной точки;
определяют навигационное видеоизображение, согласующееся с указанным навигационным запросом, причем указанное навигационное видеоизображение, согласующееся с указанным навигационным запросом, представляет собой видеоизображение для навигационного маршрута из начальной навигационной точки в конечную навигационную точку; и
осуществляют навигацию на основе указанного навигационного видеоизображения, согласующегося с указанным навигационным запросом.
2. Способ по п. 1, в котором этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, включает:
получение начальных навигационных точек и конечных навигационных точек навигационных видеоизображений; и
определение навигационного видеоизображения, и начальная навигационная точка, и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
3. Способ по п. 1, в котором этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, включает:
вычисление навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки;
запрашивание навигационного видеоизображения, содержащего указанный навигационный маршрут;
вырезание из указанного навигационного видеоизображения, содержащего навигационный маршрут, навигационного видеоизображения, которое соответствует указанному навигационному маршруту, и определение указанного навигационного видеоизображения, соответствующего навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
4. Способ по п. 1, в котором этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, включает:
вычисление навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки;
деление указанного навигационного маршрута на по меньшей мере два навигационных подмаршрута;
запрашивание навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам;
соединение указанных навигационных видеоизображений, соответствующих навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и с указанной конечной навигационной точкой.
5. Способ по любому из пп. 2-4, в котором указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние;
причем в случае, когда путем запрашивания получают по меньшей мере два навигационных видеоизображения, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой, этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, дополнительно включает:
получение навигационных параметров указанных навигационных видеоизображений;
вычисление степеней согласования указанных навигационных параметров навигационного запроса с навигационными параметрами навигационных видеоизображений; и
определение навигационного видеоизображения, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определение навигационных видеоизображений, степени согласования которых превышают предварительно заданное пороговое значение, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определение предварительно заданного числа навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
6. Способ по п. 1, в котором в случае применения указанного способа в отношении сети, этап осуществления навигации на основе навигационного видеоизображения включает отправку указанного навигационного изображения в терминал для воспроизведения.
7. Способ по п. 1, в котором в случае применения указанного способа в отношении терминала, этап осуществления навигации на основе навигационного видеоизображения включает воспроизведение указанного навигационного видеоизображения.
8. Способ по п. 7, в котором в случае, когда определяют по меньше мере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, этап осуществления навигации на основе навигационного видеоизображения включает:
упорядочивание и отображение навигационных видеоизображений, согласующихся с указанным навигационным запросом;
прием от пользователя команды на выбор одного из указанных навигационных видеоизображений; и
воспроизведение выбранного навигационного видеоизображения.
9. Способ по п. 7, в котором этап осуществления навигации на основе навигационного видеоизображения включает:
получение текущего значения скорости движения;
определение скорости воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения; и
воспроизведение навигационного видеоизображения с указанной скоростью воспроизведения.
10. Способ по п. 1, в котором в случае применения указанного способа в отношении терминала, указанный способ содержит следующие этапы:
синхронизируют навигационные данные из сети, причем указанные навигационные данные содержат навигационное видеоизображение; и
сохраняют указанные навигационные данные в локальной навигационной базе данных;
причем этап определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, включает запрашивание навигационного видеоизображения, согласующегося с указанным навигационным запросом, из указанной локальной навигационной базы данных.
11. Устройство навигации, содержащее
принимающий модуль, выполненный с возможностью получения навигационного запроса, содержащего навигационные параметры начальной навигационной точки и конечной навигационной точки;
определяющий модуль, выполненный с возможностью определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, причем указанное навигационное видеоизображение, согласующееся с указанным навигационным запросом, представляет собой видеоизображение для навигационного маршрута из начальной навигационной точки в конечную навигационную точку; и
навигационный модуль, выполненный с возможностью осуществления навигации на основе указанного навигационного видеоизображения, согласующегося с указанным навигационным запросом.
12. Устройство по п. 11, в котором указанный определяющий модуль содержит
первый принимающий подмодуль, выполненный с возможностью получения начальных навигационных точек и конечных навигационных точек навигационных видеоизображений; и
определяющий подмодуль, выполненный с возможностью определения навигационного видеоизображения, и начальная навигационная точка, и конечная навигационная точка которого совпадают с соответствующими точками указанного навигационного запроса, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
13. Устройство по п. 11, в котором указанный определяющий модуль содержит
первый вычислительный подмодуль, выполненный с возможностью вычисления навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки;
запрашивающий подмодуль, выполненный с возможностью запрашивания навигационного видеоизображения, содержащего указанный навигационный маршрут; и
вырезающий подмодуль, выполненный с возможностью вырезания из указанного навигационного видеоизображения, содержащего навигационный маршрут, навигационного видеоизображения, которое соответствует указанному навигационному маршруту, и определения указанного навигационного видеоизображения, соответствующего навигационному маршруту, в качестве навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
14. Устройство по п. 11, в котором указанный определяющий модуль содержит
первый вычислительный подмодуль, выполненный с возможностью вычисления навигационного маршрута на основе указанной начальной навигационной точки и указанной конечной навигационной точки;
делительный подмодуль, выполненный с возможностью деления навигационного маршрута на по меньшей мере два навигационных подмаршрута;
запрашивающий подмодуль, выполненный с возможностью запрашивания навигационных видеоизображений, соответствующих указанным навигационным подмаршрутам; и
соединительный подмодуль, выполненный с возможностью соединения указанных навигационных видеоизображений, соответствующих навигационным подмаршрутам, для получения навигационного видеоизображения, согласующегося с указанной начальной навигационной точкой и указанной конечной навигационной точкой.
15. Устройство по любому из пп. 12-14, в котором указанный навигационный запрос дополнительно содержит по меньшей мере один из следующих навигационных параметров: название региона, название дороги, время года, погодные условия, среднюю скорость движения и расстояние, причем указанный определяющий модуль содержит
второй принимающий подмодуль, который, в случае, когда путем запрашивания получено по меньшей мере два навигационных видеоизображения, согласующихся с указанной начальной навигационной точкой и указанной конечной навигационной точкой;
второй вычислительный подмодуль, выполненный с возможностью вычисления степеней согласования указанных навигационных параметров навигационного запроса с навигационными параметрами указанных навигационных видеоизображений,
причем указанный определяющий подмодуль выполнен с возможностью определения навигационного видеоизображения, степень согласования которого является наибольшей, в качестве навигационного видеоизображения, согласующегося с указанным навигационным запросом, или определения навигационных видеоизображений, степени согласования которых превышают предварительно заданное пороговое значение, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом, или определения предварительно заданного числа навигационных видеоизображений, степени согласования которых являются относительно высокими, в качестве навигационных видеоизображений, согласующихся с указанным навигационным запросом.
16. Устройство по п. 11, в котором, в случае применения указанного устройства в отношении сети, указанный навигационный модуль выполнен с возможностью отправки указанного навигационного видеоизображения в терминал для воспроизведения.
17. Устройство по п. 11, в котором, в случае применения указанного устройства в отношении терминала, указанный навигационный модуль выполнен с возможностью воспроизведения указанного навигационного видеоизображения.
18. Устройство по п. 17, в котором указанный навигационный модуль содержит
отображающий подмодуль, который, в случае когда определено по меньшей мере два навигационных видеоизображения, согласующихся с указанным навигационным запросом, выполнен с возможностью упорядочивания и отображения навигационных видеоизображений, согласующихся с указанным навигационным запросом;
приемный подмодуль, выполненный с возможностью приема от пользователя команды на выбор одного из указанных навигационных видеоизображений; и
воспроизводящий подмодуль, выполненный с возможностью воспроизведения выбранного навигационного видеоизображения.
19. Устройство по п. 17, в котором указанный навигационный модуль содержит
принимающий подмодуль, выполненный с возможностью получения текущего значения скорости движения;
определяющий подмодуль, выполненный с возможностью определения скорости воспроизведения навигационного видеоизображения на основе указанного текущего значения скорости движения; и
воспроизводящий подмодуль, выполненный с возможностью воспроизведения навигационного видеоизображения с указанной скоростью воспроизведения.
20. Устройство по п. 11, дополнительно содержащее
синхронизирующий модуль, выполненный с возможностью синхронизации навигационных данных из сети в случае применения указанного устройства в отношении терминала, причем указанные навигационные данные содержат навигационное видеоизображение; и
запоминающий модуль, выполненный с возможностью хранения указанных навигационных данных в локальной навигационной базе данных,
причем указанный определяющий модуль выполнен с возможностью запрашивания навигационного видеоизображения, согласующегося с указанным навигационным запросом, из указанной локальной навигационной базы данных.
21. Устройство навигации, содержащее процессор и запоминающее устройство, предназначенное для хранения инструкций, исполняемых указанным процессором, причем указанный процессор выполнен с возможностью:
получения навигационного запроса, содержащего навигационные параметры начальной навигационной точки и конечной навигационной точки;
определения навигационного видеоизображения, согласующегося с указанным навигационным запросом, причем указанное навигационное видеоизображение, согласующееся с указанным навигационным запросом, представляет собой видеоизображение для навигационного маршрута из начальной навигационной точки в конечную навигационную точку; и
осуществления навигации на основе указанного навигационного видеоизображения, согласующегося с указанным навигационным запросом.
| US 2003210806 A1, 13.11.2003 | |||
| US 5982298 A, 09.11.1999 | |||
| Подвесное здание повышенной этажности | 1985 |
|
SU1357529A1 |
| US 2005128102 A1, 16.06.2005 | |||
| WO 2004003788 A2, 08.01.2004. | |||

