[0001] Эта заявка заявляет приоритет к и полезные результаты китайской патентной заявки порядковый № CN201510145113.5, зарегистрированной Государственным ведомством интеллектуальной собственности КНР 30 марта 2015 года, полное содержимое которой включено в данный документ по ссылке.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к технологии навигации, а более конкретно, к способу навигации и навигационному устройству.
УРОВЕНЬ ТЕХНИКИ
[0003] В настоящее время навигации транспортных средств реализуются, главным образом, согласно GPS (системе глобального позиционирования). GPS-имеет преимущества точности позиционирования и высокой универсальности. Однако, в фактическом процессе вождения позиционирование и навигация, полагающиеся только на GPS, не могут больше удовлетворять водительские потребности пользователей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Для того, чтобы решать проблемы предшествующего уровня техники, настоящее изобретение предоставляет способ навигации и навигационное устройство.
[0005] Согласно варианту осуществления первого аспекта настоящего изобретения предоставляется способ навигации, и способ содержит: получение информации о состоянии шин транспортного средства; получение информации о дорожных условиях в реальном времени; и выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[0006] В варианте осуществления информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах; а информация о дорожных условиях содержит погодную информацию, максимальную нагрузку на маршруте движения и максимальную высоту на маршруте движения.
[0007] В варианте осуществления, выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит: вычисление текущей нагрузки транспортного средства согласно информации об изменении формы или информации о давлении в шинах; оценивание того, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения; и если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения, отправку предупреждения пользователю и перестроение безопасного маршрута.
[0008] В варианте осуществления, выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит: вычисление текущей высоты транспортного средства согласно информации об изменении формы или информации о давлении в шинах; оценивание того, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения; и если текущая высота транспортного средства превышает максимальную высоту на маршруте движения, отправку предупреждения пользователю и перестроение безопасного маршрута.
[0009] В варианте осуществления, выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит: оценивание согласно информации о давлении в шинах относительно того, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения; и если текущее давление в шинах достигает предварительно заданного порогового значения предупреждения, и определяется согласно погодной информации, что на маршруте движения присутствует скользкая дорога, отправку предупреждения пользователю и перестроение безопасного маршрута.
[0010] В варианте осуществления способ навигации дополнительно содержит: оценивание того, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства; и если текущая нагрузка транспортного средства превышает максимальную нагрузку транспортного средства, определение, что транспортное средство перегружено, и отправку предупреждения пользователю.
[0011] Согласно вариантам осуществления второго аспекта настоящего изобретения предоставляется навигационное устройство, и навигационное устройство содержит: первый получающий модуль, сконфигурированный, чтобы получать информацию о состоянии шин транспортного средства; второй получающий модуль, сконфигурированный, чтобы получать информацию о дорожных условиях в реальном времени; и навигационный модуль, сконфигурированный, чтобы выполнять навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[0012] В варианте осуществления информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах; а информация о дорожных условиях содержит погодную информацию, максимальную нагрузку на маршруте движения и максимальную высоту на маршруте движения.
[0013] В варианте осуществления навигационный модуль содержит: первый вычисляющий подмодуль, сконфигурированный, чтобы вычислять текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах; первый оценивающий подмодуль, сконфигурированный, чтобы оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения; и первый организационный подмодуль, сконфигурированный, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения.
[0014] В варианте осуществления навигационный модуль содержит: второй вычисляющий подмодуль, сконфигурированный, чтобы вычислять текущую высоту транспортного средства согласно информации об изменении формы или информации о давлении в шинах; второй оценивающий подмодуль, сконфигурированный, чтобы оценивать, превышает ли текущая фактическая высота транспортного средства максимальную высоту на маршруте движения; и второй организационный подмодуль, сконфигурированный, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая высота транспортного средства превышает максимальную высоту на маршруте движения.
[0015] В варианте осуществления навигационный модуль содержит: третий оценивающий модуль, сконфигурированный, чтобы оценивать согласно информации о давлении в шинах, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения; и третий организационный подмодуль, сконфигурированный, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущее давление в шинах транспортного средства достигает предварительно заданного порогового значения предупреждения, и определяется согласно погодной информации, что скользкая дорога присутствует по выстроенному маршруту движения.
[0016] В варианте осуществления навигационный модуль дополнительно содержит: четвертый оценивающий подмодуль, сконфигурированный, чтобы оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства; и подмодуль вывода, сконфигурированный, чтобы определять, что транспортное средство перегружено, и отправлять предупреждение пользователю, если текущая нагрузка транспортного средства превышает максимальную нагрузку транспортного средства.
[0017] Согласно вариантам осуществления третьего аспекта настоящего изобретения предоставляется навигационное устройство, и навигационное устройство содержит: процессор; и память, сконфигурированную, чтобы хранить инструкции, исполняемые процессором, при этом процессор конфигурируется, чтобы: получать информацию о состоянии шин транспортного средства; получать информацию о дорожных условиях в реальном времени; и выполнять навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[0018] Технические решения, предоставленные в настоящем изобретении, могут содержать следующие полезные результаты.
[0019] В вышеописанных вариантах осуществления настоящего изобретения предлагается новое техническое решение навигации, которое получает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени и затем выполняет навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации. Таким образом, навигация может быть выполнена согласно состоянию шин транспортного средства и дорожным условиям в реальном времени во время движения, что не только обогащает существующие навигационные системы, но также предоставляет возможность пользователям приспосабливаться к более сложной окружающей обстановке движения.
[0020] Следует понимать, что как вышеприведенное общее описание, так и последующее детальное описание являются только примерными и пояснительными, а не ограничивающими изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] Сопровождающие чертежи, которые содержатся и составляют часть этого описания, иллюстрируют варианты осуществления, согласующиеся с изобретением, и, вместе с описанием, служат, чтобы объяснить принципы изобретения.
[0022] Фиг. 1 – это блок-схема последовательности операций способа навигации согласно примерному варианту осуществления;
[0023] Фиг. 2 – это блок-схема последовательности операций другого способа навигации согласно примерному варианту осуществления;
[0024] Фиг. 3 – это блок-схема навигационного устройства согласно примерному варианту осуществления;
[0025] Фиг. 4 – это блок-схема другого навигационного устройства согласно примерному варианту осуществления;
[0026] Фиг. 5 – это блок-схема другого навигационного устройства согласно примерному варианту осуществления;
[0027] Фиг. 6 – это блок-схема другого навигационного устройства согласно примерному варианту осуществления;
[0028] Фиг. 7 – это блок-схема другого навигационного устройства согласно примерному варианту осуществления; и
[0029] Фиг. 8 – это схематичный чертеж навигационного устройства согласно примерному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0030] Примерные варианты осуществления будут описаны подробно в данном документе, и их примеры иллюстрируются на прилагаемых чертежах. Повсюду на чертежах, на которые ссылается последующее описание, одинаковый ссылочный номер на различных чертежах указывает один и тот же или аналогичные элементы, пока не заявлено иное. Реализации, описанные в последующих примерных вариантах осуществления, не представляют все реализации, согласующиеся с настоящим изобретением. Вместо этого, они являются лишь примерами устройства и способа, согласующихся с некоторыми аспектами настоящего изобретения, детализированными в прилагаемой формуле изобретения. Термины в настоящем изобретении используются, только чтобы описать конкретные варианты осуществления, и не предназначены, чтобы ограничивать настоящее изобретение. Сингулярные формы, такие как "a", "an" и "the" в настоящем изобретении и прилагаемой формуле изобретения также предназначены, чтобы содержать множественные формы, пока не указано иное в контексте. Должно также быть понятно, что термин "и/или", используемый в данном документе, ссылается на и содержит любую или все возможные комбинации из одного или более перечисленных объектов, ассоциированных друг с другом.
[0031] Должно быть понятно, что, хотя такие термины как первый, второй и третий, используются в настоящем изобретении для описания различной информации, информация не ограничивается этими терминами. Эти термины используются, только чтобы отличать одинаковый тип информации. Например, без отступления от рамок настоящего изобретения, первая информация может также называться второй информацией, и аналогично, вторая информация может называться первой информацией. В зависимости от контекста, слово "если", используемое в данном документе, может быть интерпретировано как "когда …" или "при …" или "в ответ на определение …".
[0032] В предшествующем уровне техники навигация транспортных средств, главным образом, реализуется на основе GPS. GPS-система навигации обычно планирует оптимальный маршрут движения с более коротким расстоянием или со свободным дорожным движением для пользователя, однако, фактическая окружающая обстановка движения является сложной переменной величиной, и GPS-система навигации не учитывает некоторые внешние факторы, которые могут влиять на безопасность вождения пользователей, при планировании маршрутов, иногда запланированный маршрут движения может не быть оптимальным маршрутом в сложной окружающей обстановке движения.
[0033] С этой целью в настоящем изобретении предлагается новое техническое решение навигации, которое получает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени и затем выполняет навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации. Таким образом, навигация может быть выполнена согласно состоянию шин транспортного средства и дорожным условиям в реальном времени во время движения, что не только обогащает существующие навигационные системы, но также предоставляет возможность пользователям приспосабливаться к более сложной окружающей обстановке движения.
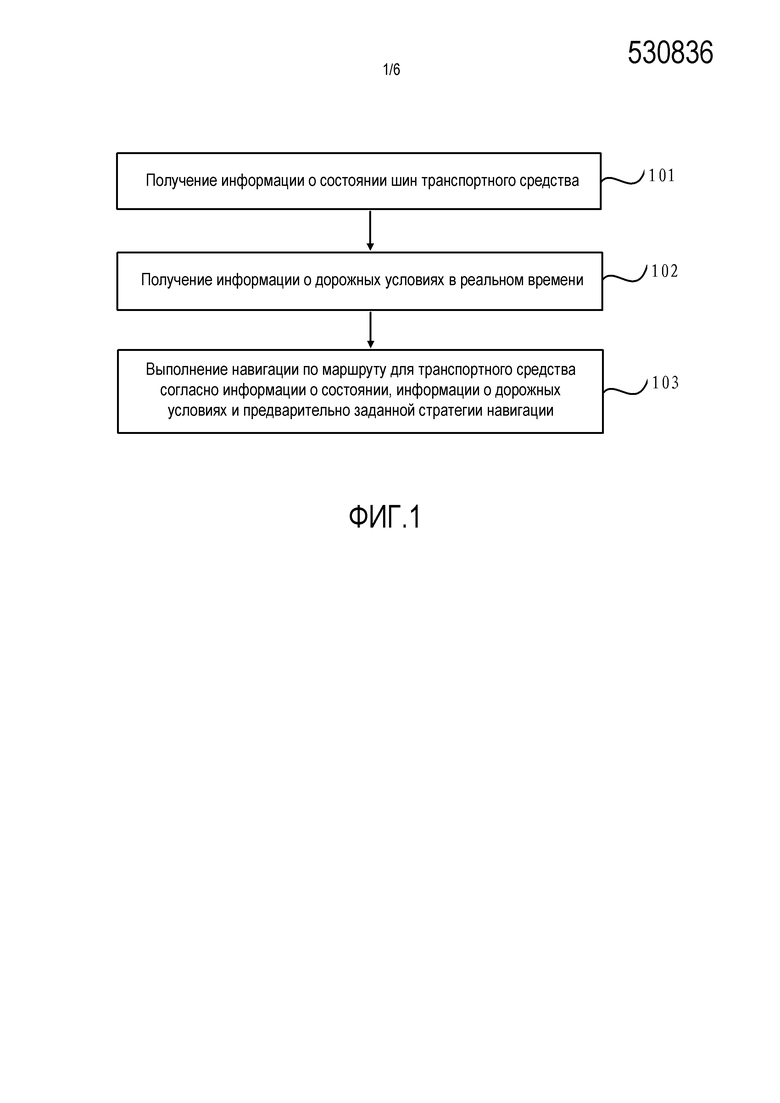
[0034] Фиг. 1 является блок-схемой последовательности операций способа навигации согласно примерному варианту осуществления, способ навигации применяется в терминале, и как показано на фиг. 1, способ навигации содержит следующие этапы.
[0035] На этапе 101 получается информация о состоянии шин транспортного средства.
[0036] На этапе 102 информация о дорожных условиях получается в реальном времени.
[0037] Порядок выполнения этапа 101 и этапа 102 может быть поменян местами.
[0038] На этапе 103 навигация по маршруту выполняется для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[0039] В настоящем изобретении терминал может быть карманным терминалом; например, карманный терминал может быть пользовательским смартфоном или специализированным карманным навигационным устройством; конечно, кроме карманного терминала, терминал может также быть терминалом в транспортном средстве; например, терминал может быть специализированным навигационным устройством в транспортном средстве или навигационным модулем в системе в транспортном средстве. Транспортное средство может быть традиционным транспортным средством, электрическим транспортным средством или гибридным транспортным средством.
[0040] При фактическом вождении после того как пользователь выбирает пункт назначения, терминал может находить текущее местоположение транспортного средства через GPS и задавать текущее местоположение в качестве начальной точки и затем планировать оптимальный маршрут движения для пользователя после анализа в картографической базе данных или GPS-базе данных, предварительно загруженной локально. Однако, маршрут движения планируется только на основе GPS, которая не учитывает некоторые внешние факторы, которые могут влиять на безопасность движения, и, таким образом, запланированный маршрут может не быть оптимальным маршрутом в осложненной окружающей обстановке движения.
[0041] Например, предположим, что участок дороги с ограничением по высоте находится на маршруте движения, запланированном посредством GPS-системы навигации, и текущая высота транспортного средства превышает ограничение по высоте. Тогда, если GPS-система навигации не учитывает фактическую высоту транспортного средства при планировании маршрута движения, пользователь может находиться в опасности, когда движется к участку дороги с ограничением по высоте согласно маршруту движения, запланированному посредством GPS-системы навигации. В качестве другого примера, предположим, что скользкая дорога находится на маршруте движения, запланированном посредством GPS-системы навигации, и текущее давление в шинах транспортного средства является слишком высоким, что может вызывать скольжение во время движения по скользкой дороге, тогда пользователь может находиться в опасности, когда движется к скользкой дороге согласно маршруту движения, запланированному посредством GPS-системы навигации.
[0042] Для того, чтобы гарантировать, чтобы маршрут движения, запланированный для пользователя, был более безопасным и более надежным, в настоящем варианте осуществления, во время планирования маршрута движения для пользователей, терминал обращается к информации о состоянии шин транспортного средства и информации о дорожных условиях в реальном времени на основе GPS-навигации, и принимает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени в качестве важных факторов в планировании маршрута, таким образом, улучшая надежность маршрута движения, запланированного для пользователей.
[0043] В настоящем варианте осуществления информация о состоянии шин транспортного средства может содержать информацию об изменении формы или информацию о давлении в шинах, при этом информация об изменении формы может быть информацией об изменении высоты или информацией об изменении объема шин транспортного средства и т.д. Информация о дорожных условиях может содержать погодную информацию, максимальную нагрузку на маршруте движения и максимальную высоту на маршруте движения, при этом максимальная нагрузка на маршруте движения или максимальная высота на маршруте движения может быть получена после анализа и отбора участков дороги на маршруте движения согласно максимальной нагрузке или максимальной высоте на каждом участке дороги. Например, для того, чтобы гарантировать проезд без причинения опасности, максимальные нагрузки или максимальные высоты на всех участках маршрута движения могут быть проанализированы, и минимальное значение из максимальных нагрузок или максимальных высот рассматривается как максимальная нагрузка или максимальная высота на дороге для движения.
[0044] Во время планирования маршрута движения для пользователя терминал сначала получает информацию об изменении формы и информацию о давлении в шинах для шин транспортного средства, также как и информацию о дорожных условиях в реальном времени, при этом информация об изменении формы шин транспортного средства может быть собрана через камеры, предварительно установленные на транспортном средстве в фиксированных местоположениях. Например, одна камера может быть закреплена на каждой шине транспортного средства, и камера может записывать изображения формы шины согласно некоторому периоду и затем сохранять записанные изображения в предварительно установленном запоминающем устройстве. При получении информации об изменении формы шин транспортного средства терминал может считывать изображения из запоминающего устройства и получать информацию, такую как изменение разницы по высоте или изменение объема, сравнивая изображения. Информация о давлении в шинах для шин транспортного средства может быть собрана посредством предварительно установленного специального устройства измерения давления в шинах, и после сбора собранные данные могут быть сохранены в предварительно установленном запоминающем устройстве или вручную введены в предварительно установленное запоминающее устройство пользователем, и, таким образом, терминал может считывать данные непосредственно из запоминающего устройства при получении информации о давлении в шинах. Информация о дорожных условиях в реальном времени, такая как погодная информация, максимальная нагрузка на маршруте движения и максимальная высота на маршруте движения, может быть собрана посредством третьесторонней платформы общественной службы или может быть вручную введена в третьестороннюю платформу службы штатом сотрудников управления транспортом, и, таким образом, терминал может устанавливать соединение с третьесторонней платформой общественной службы и синхронизировать данные с третьесторонней платформы общественной службы в реальном времени при получении информации о дорожных условиях в реальном времени.
[0045] После получения информации об изменении формы и информации о давлении в шинах для шин транспортного средства, а также информации о дорожных условиях в реальном времени, терминал может выполнять навигацию по маршруту согласно полученной информации и предварительно заданной стратегии навигации и планировать безопасный маршрут движения для пользователя. Предварительно заданная стратегия навигации может быть сконфигурирована пользователем согласно фактической обстановке движения, и в различных обстановках движения различные стратегии навигации могут быть сконфигурированы соответствующим образом.
[0046] В предварительно заданном варианте осуществления стратегия навигации может быть следующей. После планирования маршрута движения для пользователя навигационная система получает максимальную нагрузку на маршруте движения, такую как максимальные нагрузки мостов и дорожных поверхностей на каждом участке маршрута движения, и затем вычисляет текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах и определяет, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения. Если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения, маршрут движения может быть определен как опасный, и в этом случае пользователю может быть отправлено предупреждение, и безопасный маршрут может быть перестроен, таким образом, избегая опасной дороги.
[0047] После вычисления текущей нагрузки транспортного средства согласно информации об изменении формы или информации о давлении в шинах терминал может также оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства, при этом максимальная нагрузка транспортного средства может быть получена посредством получения типа транспортного средства и исследования согласно типу; а тип транспортного средства может быть получен посредством распознавания изображения предварительно установленной камеры или получен посредством идентификации интегральной схемы в транспортном средстве и считывания информации о типе, переносимой в интегральной схеме транспортного средства. После того как текущая нагрузка транспортного средства оценивается как превышающая максимальную нагрузку транспортного средства, транспортное средство может быть определено как перегруженное, а после того как транспортное средство определяется как перегруженное, пользователю может быть отправлено предупреждение, администрация по безопасности дорожного движения может быть оповещена автоматически, или транспортное средство может быть заблокировано автоматически, чтобы запрещать запуск.
[0048] В настоящем варианте осуществления стратегия навигации может также быть следующей. После планирования маршрута движения для пользователя навигационная система получает максимальную высоту на маршруте движения и затем вычисляет текущую высоту транспортного средства согласно информации об изменении формы или информации о давлении в шинах и оценивает, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения. Если текущая высота транспортного средства превышает максимальную высоту на маршруте движения, маршрут движения может быть определен как опасный, и в этом случае пользователю может быть отправлено предупреждение, и безопасный маршрут может быть перестроен, таким образом, избегая опасной дороги.
[0049] Следует отметить, что в процессе вычисления текущей нагрузки или текущей высоты транспортного средства согласно информации об изменении формы или информации о давлении в шинах, может быть выполнено моделирование данных согласно предварительно заданному алгоритму на основе данных о нагрузке, данных о давлении в шинах и данных об изменении формы шин транспортного средства, так что модель данных, представляющая соотношение между нагрузкой транспортного средства и данными о давлении в шинах или данными об изменении формы, может быть достигнута, и модель данных, представляющая соотношение между высотой транспортного средства и данными о давлении в шинах или данными об изменении формы, может также быть достигнута. Затем, согласно вышеописанным моделям данных, полученные данные о давлении в шинах или изменение формы могут быть перенесены в конкретные данные о нагрузке или данные о высоте транспортного средства. Подробная реализация создания моделей данных не будет подробно описываться в настоящем изобретении, и специалисты в области техники могут обратиться к введениям в предшествующий уровень техники.
[0050] В настоящем варианте осуществления, кроме сравнения текущей нагрузки или текущей высоты транспортного средства с максимальной нагрузкой или максимальной высотой на маршруте движения, чтобы определять, является ли текущий маршрут движения опасной дорогой, стратегия навигации может также быть задана в комбинации с погодной информацией. Например, при фактическом движении, если давление в шинах транспортного средства пользователя является слишком высоким, и если на маршруте движения присутствует скользкая дорога, может быть вызвано скольжение при движении по скользкой дороге, и, таким образом, стратегия навигации может быть следующей. Навигационная система получает погодную информацию после планирования дороги для движения для пользователя и оценивает, присутствует ли скользкая дорога на маршруте движения согласно погодной информации. Например, навигационная система может оценивать, будет ли дождь или снег в регионе, где проходит маршрут движения, и если да, навигационная система определяет, что на маршруте движения присутствует скользкая дорога. Дополнительно, если определяется, что на маршруте движения присутствует скользкая дорога, может быть дополнительно оценено, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения, и если да, транспортное средство может скользить по скользкой дороге. Следовательно, текущий маршрут движения может быть определен как опасная дорога, если текущее давление в шинах достигает предварительно заданного порогового значения предупреждения, и в этом случае пользователю может быть отправлено предупреждение, и безопасный маршрут может быть перестроен, чтобы избегать опасной дороги.
[0051] Конечно, на практике, конкретное содержимое стратегии навигации не ограничивается вышеописанным содержимым, и другие стратегии навигации могут быть заданы пользователями согласно обстановкам движения. Например, степень износа шин может быть получена, и расстояние, на которое транспортное средство может двигаться безопасно, может быть определено согласно степени износа шин. Если степень износа шин является высокой, и расстояние, на которое транспортное средство может двигаться безопасно, меньше расстояния до пункта назначения по маршруту движения, пользователю может быть отправлено предупреждение, и более близкий маршрут до пункта назначения может быть перестроен, или маршрут движения до ближайшей станции технического обслуживания может быть организован, что не будет подробно описываться в настоящем варианте осуществления.
[0052] В вышеописанных вариантах осуществления предлагается новое техническое решение навигации, которое получает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени и затем выполняет навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации. Таким образом, навигация может быть выполнена согласно состоянию шин транспортного средства и дорожным условиям в реальном времени во время движения, что не только обогащает существующие навигационные системы, но также предоставляет возможность пользователям адаптироваться к более сложной окружающей обстановке движения.
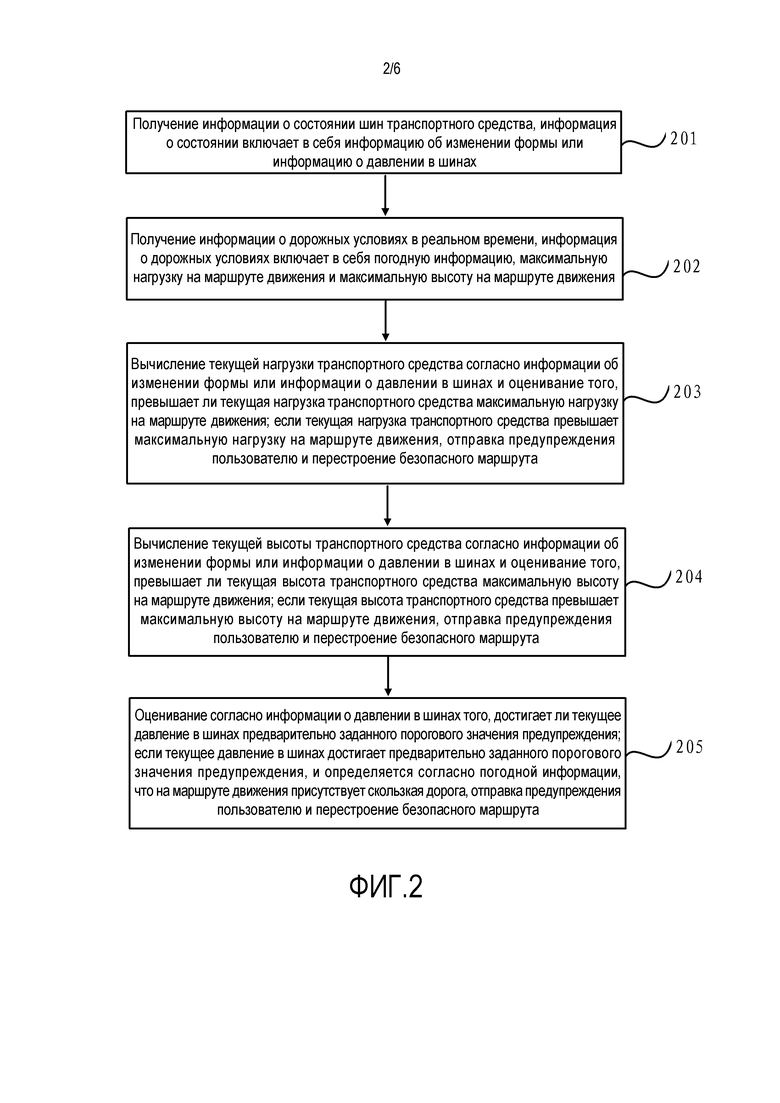
[0053] Фиг. 2 является блок-схемой последовательности операций другого способа навигации согласно примерному варианту осуществления, который применяется в терминале. Как показано на фиг. 2, способ навигации содержит следующие этапы.
[0054] На этапе 201 получается информация о состоянии шин транспортного средства, при этом информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах для шин транспортного средства.
[0055] На этапе 202 информация о дорожных условиях получается в реальном времени, при этом информация о дорожных условиях содержит погодную информацию, максимальную нагрузку на маршруте движения и максимальную высоту на маршруте движения.
[0056] На этапе 203 текущая нагрузка транспортного средства вычисляется согласно информации об изменении формы или информации о давлении в шинах, и оценивается, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения. Если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения, предупреждение отправляется пользователю, и безопасный маршрут перестраивается.
[0057] На этапе 204 текущая высота транспортного средства вычисляется согласно информации об изменении формы или информации о давлении в шинах, и оценивается, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения. Если текущая высота транспортного средства превышает максимальную высоту на маршруте движения, предупреждение отправляется пользователю, и безопасный маршрут перестраивается.
[0058] На этапе 205 оценивается согласно информации о давлении в шинах, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения. Если текущее давление в шинах достигает порогового значения предупреждения, и определяется согласно погодной информации, что на маршруте движения присутствует скользкая дорога, предупреждение отправляется пользователю, и безопасный маршрут перестраивается.
[0059] Порядок выполнения этапа 201 и этапа 202 может быть поменян местами, и порядок выполнения этапов 203, 204 и 205 может быть поменян местами.
[0060] В настоящем варианте осуществления терминал может быть карманным терминалом; например, карманный терминал может быть пользовательским смартфоном или специализированным карманным навигационным устройством; конечно, кроме карманного терминала, терминал может также быть терминалом в транспортном средстве; например, терминал может быть специализированным навигационным устройством в транспортном средстве или навигационным модулем в системе в транспортном средстве. Транспортное средство может быть традиционным транспортным средством, электрическим транспортным средством или гибридным транспортным средством.
[0061] При фактическом вождении, после того как пользователь выбирает пункт назначения, терминал может находить текущее местоположение транспортного средства через GPS и задавать текущее местоположение в качестве начальной точки и затем планировать оптимальный маршрут движения для пользователя после анализа в картографической базе данных или GPS-базе данных, предварительно загруженной локально. Однако, маршрут движения планируется на основе GPS, которая не учитывает некоторые внешние факторы, которые могут влиять на безопасность движения, и, таким образом, запланированный маршрут движения может не быть оптимальным маршрутом в осложненной окружающей обстановке движения.
[0062] Например, предположим, что участок дороги с ограничением по высоте находится на маршруте движения, запланированном посредством GPS-системы навигации, и текущая высота транспортного средства превышает ограничение по высоте. Тогда, если GPS-система навигации не учитывает фактическую высоту транспортного средства при планировании маршрута движения, пользователь может быть в опасности, когда движется к участку дороги с ограничением по высоте согласно маршруту движения, запланированному посредством GPS-системы навигации. В качестве другого примера, предположим, что на маршруте движения присутствует скользкая дорога, запланированном посредством GPS-системы навигации, и текущее давление в шинах транспортного средства является слишком высоким, что может вызвать скольжение во время движения по скользкой дороге, тогда пользователь может быть в опасности, когда движется к скользкой дороге согласно маршруту движения, запланированному посредством GPS-системы навигации.
[0063] Для того, чтобы гарантировать, чтобы маршрут движения, запланированный для пользователя, был более безопасным и более надежным, в настоящем варианте осуществления, во время планирования маршрута движения для пользователей, терминал обращается к информации о состоянии шин транспортного средства и информации о дорожных условиях в реальном времени на основе GPS-навигации, и принимает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени в качестве важных факторов в планировании маршрута, таким образом, улучшая надежность маршрута движения, запланированного для пользователей.
[0064] В настоящем варианте осуществления информация о состоянии шин транспортного средства может содержать информацию об изменении формы или информацию о давлении в шинах, при этом информация об изменении формы может быть информацией об изменении высоты или информацией об изменении объема шин транспортного средства и т.д. Информация о дорожных условиях может содержать погодную информацию, максимальную нагрузку на маршруте движения и максимальную высоту на маршруте движения, при этом максимальная нагрузка на маршруте движения или максимальная высота на маршруте движения может быть получена после анализа и отбора участков дороги на маршруте движения согласно максимальной нагрузке или максимальной высоте на каждом участке маршрута движения. Например, для того, чтобы гарантировать проезд без причинения опасности, максимальные нагрузки или максимальные высоты на всех участках маршрута движения могут быть проанализированы, и минимальное значение из максимальных нагрузок или максимальных высот рассматривается как максимальная нагрузка или максимальная высота на дороге для движения.
[0065] Во время планирования маршрута движения для пользователя терминал сначала получает информацию об изменении формы и информацию о давлении в шинах для шин транспортного средства, также как и информацию о дорожных условиях в реальном времени, при этом информация об изменении формы может быть собрана через камеры, предварительно установленные на транспортном средстве в фиксированных местоположениях. Например, одна камера может быть закреплена на каждой шине транспортного средства, и камера может записывать изображения формы шины согласно некоторому периоду и затем сохранять записанные изображения в предварительно установленном запоминающем устройстве. При получении информации об изменении формы шин транспортного средства терминал может считывать изображения из запоминающего устройства и получать информацию, такую как изменение разницы по высоте или изменение объема, сравнивая изображения. Информация о давлении в шинах может быть собрана посредством предварительно установленного специального устройства измерения давления в шинах, и после сбора собранные данные могут быть сохранены в предварительно установленном запоминающем устройстве или вручную введены в предварительно установленное запоминающее устройство пользователем, и, таким образом, терминал может считывать данные непосредственно из запоминающего устройства при получении информации о давлении в шинах. Информация о дорожных условиях в реальном времени, такая как погодная информация, максимальная нагрузка на маршруте движения и максимальная высота на маршруте движения, может быть собрана посредством третьесторонней платформы общественной службы или вручную введена в третьесторонную платформу службы штатом сотрудников управления транспорта, и, таким образом, терминал может устанавливать соединение с третьесторонней платформой общественной службы и синхронизировать данные с третьесторонней платформой общественной службы в реальном времени при получении информации о дорожных условиях в реальном времени.
[0066] После получения информации об изменении формы, информации о давлении в шинах и информации о дорожных условиях в реальном времени терминал может выполнять навигацию по маршруту согласно полученной информации и предварительно заданной стратегии навигации и планировать безопасный маршрут движения для пользователя. Предварительно заданная стратегия навигации может быть сконфигурирована пользователем согласно фактической обстановке движения, и в различных обстановках движения различные стратегии навигации могут быть сконфигурированы соответствующим образом.
[0067] В предварительно заданном варианте осуществления стратегия навигации может быть следующей. После планирования маршрута движения для пользователя навигационная система получает максимальную нагрузку на маршруте движения, такую как максимальные нагрузки мостов и дорожных поверхностей на каждом участке маршрута движения, и затем вычисляет текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах и оценивает, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения. Если текущая нагрузка превышает максимальную нагрузку на маршруте движения, маршрут движения может быть определен как опасная дорога, и в этом случае пользователю может быть отправлено предупреждение, и безопасный маршрут может быть перестроен, чтобы избегать опасной дороги.
[0068] После вычисления текущей нагрузки транспортного средства согласно информации об изменении формы или информации о давлении в шинах терминал может также оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства, при этом максимальная нагрузка транспортного средства может быть получена посредством получения типа транспортного средства и исследования согласно типу; а тип транспортного средства может быть получен посредством распознавания изображения предварительно установленной камеры или получен посредством идентификации интегральной схемы в транспортном средстве и считывания информации о типе, переносимой в интегральной схеме транспортного средства. После того как текущая нагрузка транспортного средства оценивается как превышающая максимальную нагрузку транспортного средства, транспортное средство может быть определено как перегруженное, а после того как транспортное средство определяется как перегруженное, пользователю может быть отправлено предупреждение, администрация по безопасности дорожного движения может быть оповещена автоматически, или транспортное средство может быть заблокировано автоматически, чтобы запрещать запуск.
[0069] В настоящем варианте осуществления стратегия навигации может также быть следующей. Навигационная система получает максимальную высоту на маршруте движения после планирования маршрута движения для пользователя и затем вычисляет текущую высоту транспортного средства согласно информации об изменении формы или информации о давлении в шинах и оценивает, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения. Если текущая высота транспортного средства превышает максимальную высоту на маршруте движения, маршрут движения может быть определен как опасная дорога, и в этом случае пользователю может быть отправлено предупреждение, и безопасный маршрут может быть перестроен, чтобы избегать опасной дороги.
[0070] Следует отметить, что в процессе вычисления текущей нагрузки или текущей высоты транспортного средства согласно информации об изменении формы или информации о давлении в шинах моделирование данных может быть выполнено согласно предварительно заданному алгоритму на основе данных о нагрузке, данных о давлении в шинах и данных об изменении формы шин транспортного средства, так что модель данных, представляющая соотношение между нагрузкой транспортного средства и данными о давлении в шинах или данными об изменении формы, может быть достигнута, и модель данных, представляющая соотношение между высотой транспортного средства и данными о давлении в шинах или данными об изменении формы, может также быть достигнута. Затем, согласно вышеописанным моделям данных, полученные данные о давлении в шинах или изменение формы могут быть перенесены в конкретные данные о нагрузке или данные о высоте транспортного средства. Подробная реализация создания моделей данных не будет описана подробно в настоящем изобретении, и специалисты в области техники могут обратиться к введениям в предшествующий уровень техники.
[0071] В настоящем варианте осуществления, кроме сравнения текущей нагрузки или текущей высоты транспортного средства с максимальной нагрузкой или максимальной высотой на маршруте движения, чтобы определять, является ли текущий маршрут движения опасной дорогой, стратегия навигации может также быть задана в комбинации с погодной информацией. Например, при фактическом движении, если давление в шинах транспортного средства пользователя является слишком высоким, и если на маршруте движения присутствует скользкая дорога, может быть вызвано скольжение при движении по скользкой дороге, и, таким образом, стратегия навигации может быть следующей. Навигационная система получает погодную информацию после планирования маршрута движения для пользователя и оценивает, присутствует ли скользкая дорога на маршруте движения согласно погодной информации. Например, навигационная система может оценивать, будет ли дождь или снег в регионе, где проходит маршрут движения, и если да, навигационная система определяет, что на маршруте движения присутствует скользкая дорога. Дополнительно, если определяется, что на маршруте движения присутствует скользкая дорога, может быть дополнительно оценено, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения, и если да, транспортное средство может скользить по скользкой дороге. Следовательно, текущий маршрут движения может быть определен как опасная дорога, если текущее давление в шинах достигает предварительно заданного порогового значения предупреждения, и в этом случае пользователю может быть отправлено предупреждение, и безопасный маршрут может быть перестроен, чтобы избегать опасной дороги.
[0072] Конечно, на практике, конкретное содержимое стратегии навигации не ограничивается вышеописанным содержимым, и другие стратегии навигации могут быть заданы пользователями согласно обстановкам движения. Например, степень износа шин может быть получена, и расстояние, на которое транспортное средство может двигаться безопасно, может быть определено согласно степени износа шин. Если степень износа шин является высокой, и расстояние, на которое транспортное средство может двигаться безопасно, меньше расстояния до пункта назначения по маршруту движения, пользователю может быть отправлено предупреждение, и более близкий маршрут до пункта назначения может быть перестроен, или маршрут движения до ближайшей станции технического обслуживания может быть организован, что не будет описано подробно в настоящем варианте осуществления.
[0073] В вышеописанных вариантах осуществления предлагается новое техническое решение навигации, которое получает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени и затем выполняет навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации. Таким образом, навигация может быть выполнена согласно состоянию шин транспортного средства и дорожным условиям в реальном времени во время движения, что не только обогащает существующие навигационные системы, но также предоставляет возможность пользователям адаптироваться к более сложной окружающей обстановке движения.
[0074] Согласно описанным вариантам осуществления способа навигации настоящее изобретение также предоставляет навигационное устройство.
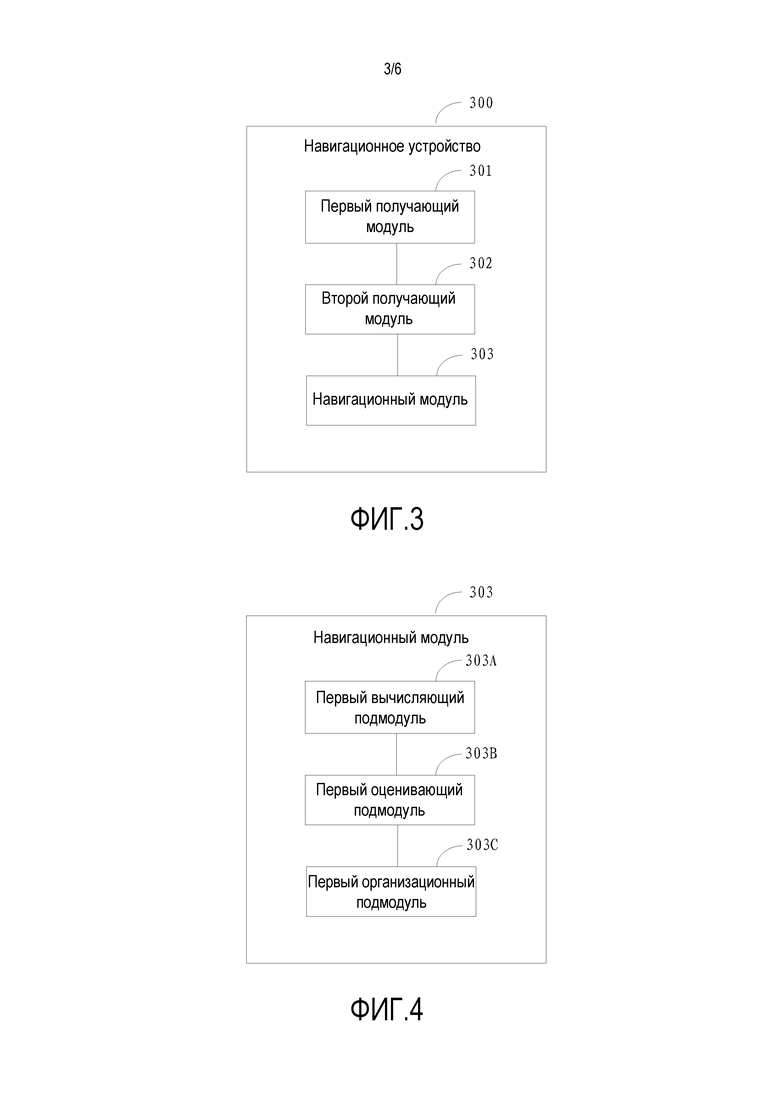
[0075] Фиг. 3 – это блок-схема навигационного устройства согласно примерному варианту осуществления.
[0076] Как показано на фиг. 3, навигационное устройство 300 согласно примерному варианту осуществления содержит первый получающий модуль 301, второй получающий модуль 302 и навигационный модуль 303.
[0077] Первый получающий модуль 301 конфигурируется, чтобы получать информацию о состоянии шин транспортного средства.
[0078] Второй получающий модуль 302 конфигурируется, чтобы получать информацию о дорожных условиях в реальном времени.
[0079] Навигационный модуль 303 конфигурируется, чтобы выполнять навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[0080] В настоящем варианте осуществления информация о состоянии шин транспортного средства может содержать информацию об изменении формы или информацию о давлении в шинах; а информация о дорожных условиях может содержать погодную информацию, максимальную нагрузку на маршруте движения и максимальную высоту на маршруте движения.
[0081] В вышеописанном варианте осуществления предлагается новое техническое решение навигации, которое получает информацию о состоянии шин транспортного средства и информацию о дорожных условиях в реальном времени и затем выполняет навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации. Таким образом, навигация может быть выполнена согласно состоянию шин транспортного средства и дорожным условиям в реальном времени во время движения, что не только обогащает существующие навигационные системы, но также предоставляет возможность пользователям адаптироваться к более сложной окружающей обстановке движения.
[0082] Обращаясь к фиг. 4, которая является блок-схемой другого навигационного устройства согласно примерному варианту осуществления, навигационный модуль 303 содержит первый вычисляющий подмодуль 303A, первый оценивающий подмодуль 303B и первый организационный подмодуль 303C, на основе варианта осуществления, показанного на фиг. 3.
[0083] Первый вычисляющий подмодуль 303A конфигурируется, чтобы вычислять текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах.
[0084] Первый оценивающий подмодуль 303B конфигурируется, чтобы оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения.
[0085] Первый организационный подмодуль 303C конфигурируется, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения.
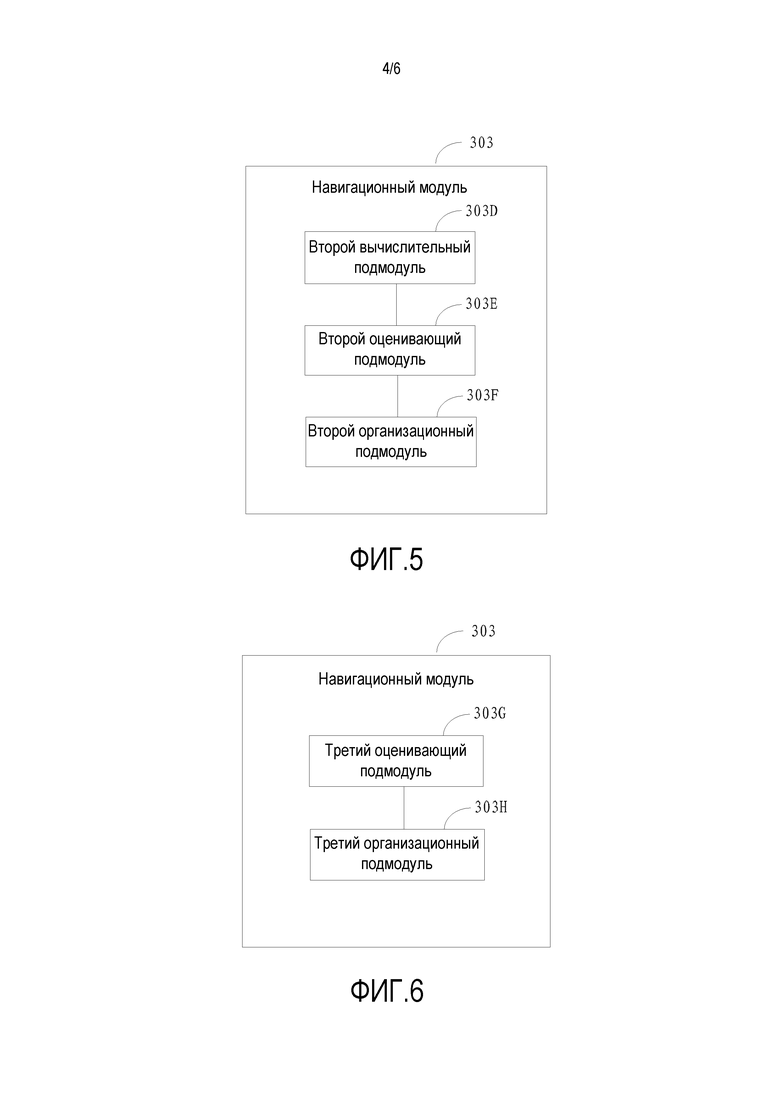
[0086] Обращаясь к фиг. 5, которая является блок-схемой другого навигационного устройства согласно примерному варианту осуществления, навигационный модуль 303 может содержать второй вычисляющий подмодуль 303D, второй оценивающий подмодуль 303E и второй организационный подмодуль 303F, на основе варианта осуществления, показанного на фиг. 3.
[0087] Второй вычисляющий подмодуль 303D конфигурируется, чтобы вычислять текущую высоту транспортного средства согласно информации об изменении формы или информации о давлении в шинах.
[0088] Второй оценивающий подмодуль 303E конфигурируется, чтобы оценивать, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения.
[0089] Второй организационный подмодуль 303F конфигурируется, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая высота транспортного средства превышает максимальную высоту на маршруте движения.
[0090] Следует отметить, что второй вычисляющий подмодуль 303D, второй оценивающий подмодуль 303E и второй организационный подмодуль 303F, указанные в варианте осуществления устройства, показанном на фиг. 5, могут также содержаться в варианте осуществления, показанном на фиг. 4, который не будет ограничен в настоящем изобретении.
[0091] Обращаясь к фиг. 6, которая является блок-схемой другого навигационного устройства согласно примерному варианту осуществления, навигационный модуль 303 может содержать третий оценивающий подмодуль 303G и третий организационный подмодуль 303H, на основе варианта осуществления, показанного на фиг. 3.
[0092] Третий оценивающий подмодуль 303G конфигурируется, чтобы оценивать согласно информации о давлении в шинах, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения.
[0093] Третий организационный подмодуль 303H конфигурируется, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущее давление в шинах транспортного средства достигает предварительно заданного порогового значения предупреждения, и определяется согласно погодной информации, что скользкая дорога присутствует на выстроенном маршруте движения.
[0094] Следует отметить, что третий оценивающий подмодуль 303G и третий организационный подмодуль 303H, указанные в варианте осуществления устройства, показанном на фиг. 6, могут также содержаться в варианте осуществления устройства, показанном на фиг. 4-5, который не будет ограничен в настоящем изобретении.
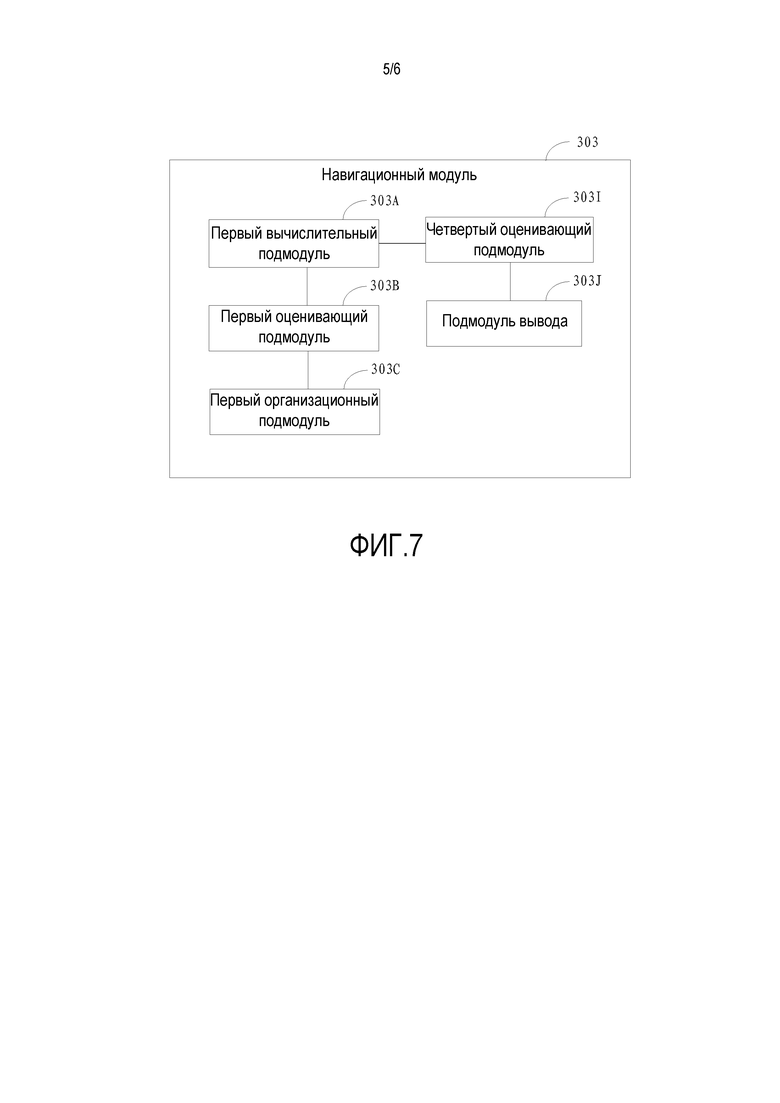
[0095] Обращаясь к фиг. 7, которая является блок-схемой другого навигационного устройства согласно примерному варианту осуществления, навигационный модуль 303 может содержать четвертый оценивающий подмодуль 303I и подмодуль 303J вывода, на основе варианта осуществления, показанного на фиг. 4.
[0096] Четвертый оценивающий подмодуль 303I конфигурируется, чтобы оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства.
[0097] Подмодуль 303J вывода конфигурируется, чтобы определять, что транспортное средство перегружено, и отправлять предупреждение пользователю, если текущая нагрузка транспортного средства превышает максимальную нагрузку транспортного средства.
[0098] Следует отметить, что четвертый оценивающий подмодуль 303I и подмодуль 303J вывода, указанные в варианте осуществления устройства, показанном на фиг. 6, могут также содержаться в варианте осуществления устройства, показанном на фиг. 3 или фиг. 5-6, который не будет ограничен в настоящем изобретении.
[0099] Что касается устройств в вышеописанных вариантах осуществления, конкретные режимы работы индивидуальных модулей в них были описаны подробно в вариантах осуществления, касающихся способов отображения WIFI-списка, которые не будут детально разбираться в данном документе.
[00100] Так как варианты осуществления устройства в значительной степени соответствуют вариантам осуществления способа, связанные аспекты могут ссылаться на описание в вариантах осуществления способа. Варианты осуществления устройства, описанные выше, являются только примерными, и модули, иллюстрированные как отдельные компоненты в данном документе, могут быть или могут не быть физически отделены друг от друга, а компоненты, представленные как модули, могут быть или могут не быть физическими модулями, т.е., могут быть расположены в одном и том же месте или могут быть распределены во множестве сетевых устройств. Некоторые или все модули могут быть выбраны согласно фактическим требованиям так, чтобы добиваться целей настоящего изобретения, которые могут быть поняты или реализованы специалистами в области техники без творческой деятельности.
[00101] Соответственно, навигационное устройство также предоставляется в настоящем изобретении, и навигационное устройство содержит процессор и память, сконфигурированную, чтобы хранить инструкции, исполняемые процессором. Процессор конфигурируется, чтобы получать информацию о состоянии шин транспортного средства; получать информацию о дорожных условиях в реальном времени; и выполнять навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[00102] Фиг. 8 – это схематичный чертеж, иллюстрирующий навигационное устройство согласно примерному варианту осуществления.
[00103] Как показано на фиг. 8, навигационное устройство 800 согласно примерному варианту осуществления может быть мобильным телефоном, навигационным оборудованием, компьютером, компьютером в транспортном средстве, цифровым широковещательным терминалом, устройством обмена сообщениями, игровой консолью, планшетным устройством, медицинским устройством, тренажерным оборудованием и персональным цифровым помощником и т.д.
[00104] Обращаясь к фиг. 8, навигационное устройство 800 может содержать один или более следующих компонентов: компонент 801 обработки, память 802, компонент 803 энергоснабжения, мультимедийный компонент 804, аудиокомпонент 805, интерфейс 806 ввода/вывода (I/O), компонент 807 датчика и компонент 808 связи.
[00105] Компонент 801 обработки типично управляет всеми операциями устройства 800, такими как операции, ассоциированные с отображением, телефонными вызовами, обменами данными, операциями камеры и операциями записи. Компонент 801 обработки может содержать один или более процессоров 809, чтобы выполнять инструкции, чтобы выполнять все или часть этапов в вышеописанных способах. Кроме того, компонент 801 обработки может содержать один или более модулей, которые обеспечивают взаимодействие между компонентом 801 обработки и другими компонентами. Например, компонент 801 обработки может содержать мультимедийный модуль, чтобы способствовать взаимодействию между мультимедийным компонентом 804 и компонентом 801 обработки.
[00106] Память 802 конфигурируется, чтобы хранить различные типы данных, чтобы поддерживать работу устройства 800. Примеры таких данных содержат инструкции для каких-либо приложений или способов, работающих на устройстве 1400, контактные данные, данные телефонной книги, сообщения, изображения, видеозаписи и т.д. Память 802 может быть реализована с помощью любого типа энергозависимых или энергонезависимых запоминающих устройств или их комбинации, такого как статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00107] Компонент 803 энергоснабжения предоставляет энергию различным компонентам устройства 800. Компонент 803 энергоснабжения может содержать систему управления энергией, один или более источников энергии и любые другие компоненты, ассоциированные с генерацией, управлением и распределением энергии в устройстве 800.
[00108] Мультимедийный компонент 804 содержит экран, предоставляющий интерфейс вывода между устройством 800 и пользователем. В некоторых вариантах осуществления экран может содержать жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран содержит сенсорную панель, экран может быть реализован как сенсорный экран, чтобы принимать входные сигналы от пользователя. Сенсорная панель содержит один или более сенсорных датчиков, чтобы распознавать касания, скольжения и другие жесты на сенсорной панели. Сенсорные датчики могут не только распознавать границу касания или действия скольжения, но также распознавать период времени и давление, ассоциированные с касанием или действием скольжения. В некоторых вариантах осуществления мультимедийный компонент 804 содержит переднюю камеру и/или заднюю камеру. Передняя камера и/или задняя камера могут принимать внешние мультимедийные данные, в то время как устройство 800 находится в рабочем режиме, таком как режим фотографирования или режим видеосъемки. Каждая из передней камеры и задней камеры может быть системой с фиксированной оптической линзой или иметь возможность фокусирования и оптического увеличения.
[00109] Аудиокомпонент 805 конфигурируется, чтобы выводить и/или вводить аудиосигналы. Например, аудиокомпонент 805 содержит микрофон (MIC), сконфигурированный, чтобы принимать внешний аудиосигнал, когда устройство 800 находится в рабочем режиме, таком как режим вызова, режим записи и режим распознавания голоса. Принятый аудиосигнал может быть дополнительно сохранен в памяти 802 или передан посредством компонента 808 связи. В некоторых вариантах осуществления аудиокомпонент 805 дополнительно содержит динамик, чтобы выводить аудиосигналы.
[00110] I/O-интерфейс 806 предоставляет интерфейс между компонентом 801 обработки и периферийными интерфейсными модулями, такими как клавиатура, колесо со щелчком, кнопки и т.п. Кнопки могут содержать, но не только, кнопку начальной страницы, кнопку громкости, кнопку запуска и кнопку блокировки.
[00111] Компонент 807 датчика содержит один или более датчиков, чтобы предоставлять оценки состояния различных аспектов устройства 800. Например, компонент 807 датчика может обнаруживать открытое/закрытое состояние устройства 800 и относительное позиционирование компонентов (например, дисплея и клавиатуры устройства 800). Компонент 807 датчика может также обнаруживать изменение в позиции устройства 800 или компонента в устройстве 800, присутствие или отсутствие пользовательского контакта с устройством 800, ориентацию или ускорение/замедление устройства 800 и изменение в температуре устройства 800. Компонент 807 датчика может содержать датчик близости, сконфигурированный, чтобы обнаруживать присутствие близких объектов без какого-либо физического контакта. Компонент 807 датчика может также содержать датчик света, такой как CMOS- или CCD-датчик изображения для использования в приложениях формирования изображений. В некоторых вариантах осуществления компонент 807 датчика может также содержать датчик акселерометра, датчик гироскопа, магнитный датчик, датчик давления или температурный датчик.
[00112] Компонент 808 связи конфигурируется, чтобы обеспечивать проводную или беспроводную связь между устройством 800 и другими устройствами. Устройство 800 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G или 3G, или их комбинации. В одном примерном варианте осуществления компонент 808 связи принимает широковещательный сигнал или ассоциированную с вещанием информацию от внешней системы управления вещанием через широковещательный канал. В одном примерном варианте осуществления компонент 808 связи дополнительно содержит модуль связи ближнего радиуса действия (NFC), чтобы обеспечивать связь ближнего действия. Например, NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии инфракрасной передачи данных (IrDA), технологии сверхширокой полосы пропускания (UWB), технологии Bluetooth (BT) и других технологий.
[00113] В примерных вариантах осуществления устройство 800 может быть реализовано с помощью одной или более специализированных интегральных микросхем (ASIC), цифровых сигнальных процессоров (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для выполнения вышеописанных способов.
[00114] В примерных вариантах осуществления также предоставляется энергонезависимый компьютерно-читаемый носитель хранения информации, содержащий инструкции, такой как память 802, содержащая инструкции. Вышеупомянутые инструкции являются исполняемыми процессором 809 в устройстве 800 для выполнения вышеописанных способов. Например, энергонезависимый компьютерно-читаемый носитель хранения может быть ROM, RAM, CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных и т.п.
[00115] Когда инструкции на носителе хранения информации исполняются процессором мобильного терминала, мобильный терминал может реализовывать способ навигации, содержащий: получение информации о состоянии шин транспортного средства; получение информации о дорожных условиях в реальном времени; и выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации.
[00116] Другие варианты осуществления изобретения будут очевидны специалистам в области техники из рассмотрения спецификации и практического применения изобретения, раскрытого в данном документе. Эта заявка предполагает охватывать любые варианты, использования или адаптации изобретения, следующие общим его принципам и содержащие такие отступления от настоящего изобретения как подпадающие под известную или привычную практику в области техники. Предполагается, что спецификация и примеры рассматриваются только как примерные, при этом истинные рамки и дух изобретения указываются посредством последующей формулы изобретения.
[00117] Будет понятно, что настоящее изобретение не ограничивается точной конструкцией, которая была описана выше и иллюстрирована на сопровождающих чертежах, и что различные модификации и изменения могут быть выполнены без отступления от его рамок. Предполагается, что рамки изобретения должны быть ограничены только прилагаемой формулой изобретения.

Предложенная группа изобретений относится к средствам для навигации, используемым в процессе движения транспортного средства. Согласно предложенному способу навигации получают информацию о состоянии шин транспортного средства, при этом информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах, причем информация об изменении формы собирается через камеры, предварительно установленные на транспортном средстве в фиксированных положениях, и информация о давлении в шинах собирается посредством предварительно установленного устройства измерения давления в шинах, и собранные данные сохраняются в предварительно установленном запоминающем устройстве или вручную вводятся в предварительно установленное запоминающее устройство пользователем; получают информацию о дорожных условиях в реальном времени, причем информация о дорожных условиях содержит погодную информацию; и выполняют навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации; при этом выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит этапы, на которых: вычисляют текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах; оценивают, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения, при этом максимальная нагрузка транспортного средства получается посредством получения типа транспортного средства и исследования согласно типу, а тип транспортного средства получается посредством распознавания изображения предварительно установленной камеры или получается посредством идентификации интегральной схемы в транспортном средстве и считывания информации о типе, переносимой в интегральной схеме транспортного средства; и если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения, отправляют предупреждение пользователю и перестраивают безопасный маршрут. Указанный способ позволяет реализовать два варианта навигационного устройства. 3 н. и 6 з.п. ф-лы, 8 ил.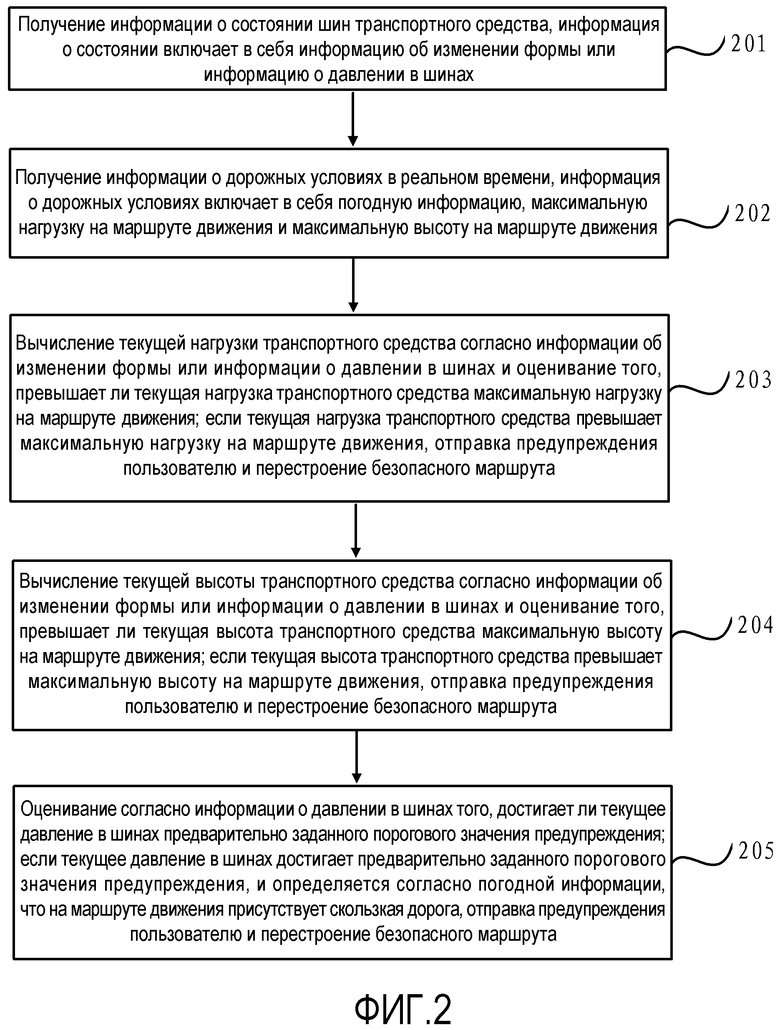
1. Способ навигации, содержащий этапы, на которых:
получают информацию о состоянии шин транспортного средства, при этом информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах, причем информация об изменении формы собирается через камеры, предварительно установленные на транспортном средстве в фиксированных положениях, и информация о давлении в шинах собирается посредством предварительно установленного устройства измерения давления в шинах, и собранные данные сохраняются в предварительно установленном запоминающем устройстве или вручную вводятся в предварительно установленное запоминающее устройство пользователем;
получают информацию о дорожных условиях в реальном времени, причем информация о дорожных условиях содержит погодную информацию; и
выполняют навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации;
при этом выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит этапы, на которых:
вычисляют текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах;
оценивают, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения, при этом максимальная нагрузка транспортного средства получается посредством получения типа транспортного средства и исследования согласно типу, а тип транспортного средства получается посредством распознавания изображения предварительно установленной камеры или получается посредством идентификации интегральной схемы в транспортном средстве и считывания информации о типе, переносимой в интегральной схеме транспортного средства; и
если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения, отправляют предупреждение пользователю и перестраивают безопасный маршрут.
2. Способ навигации по п. 1, при этом выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит этапы, на которых:
вычисляют текущую высоту транспортного средства согласно информации об изменении формы или информации о давлении в шинах;
оценивают, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения; и
если текущая высота транспортного средства превышает максимальную высоту на маршруте движения, отправляют предупреждение пользователю и перестраивают безопасный маршрут.
3. Способ навигации по п. 1, при этом выполнение навигации по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации содержит этапы, на которых:
оценивают согласно информации о давлении в шинах, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения; и
если текущее давление в шинах достигает порогового значения предупреждения, и определяется согласно погодной информации, что на маршруте движения присутствует скользкая дорога, отправляют предупреждение пользователю и перестраивают безопасный маршрут.
4. Способ навигации по п. 1, дополнительно содержащий этапы, на которых:
оценивают, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства; и
если текущая нагрузка транспортного средства превышает максимальную нагрузку транспортного средства, определяют, что транспортное средство перегружено, и отправляют предупреждение пользователю.
5. Навигационное устройство, содержащее:
первый получающий модуль, сконфигурированный, чтобы получать информацию о состоянии шин транспортного средства, при этом информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах, причем информация об изменении формы собирается через камеры, предварительно установленные на транспортном средстве в фиксированных положениях, и информация о давлении в шинах собирается посредством предварительно установленного устройства измерения давления в шинах, и собранные данные сохраняются в предварительно установленном запоминающем устройстве или вручную вводятся в предварительно установленное запоминающее устройство пользователем;
второй получающий модуль, сконфигурированный, чтобы получать информацию о дорожных условиях в реальном времени, причем информация о дорожных условиях содержит погодную информацию; и
навигационный модуль, сконфигурированный, чтобы выполнять навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации, при этом навигационный модуль содержит:
первый вычисляющий подмодуль, сконфигурированный, чтобы вычислять текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах;
первый оценивающий подмодуль, сконфигурированный, чтобы оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения, при этом максимальная нагрузка транспортного средства получается посредством получения типа транспортного средства и исследования согласно типу, а тип транспортного средства получается посредством распознавания изображения предварительно установленной камеры или получается посредством идентификации интегральной схемы в транспортном средстве и считывания информации о типе, переносимой в интегральной схеме транспортного средства; и
первый организационный подмодуль, сконфигурированный, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения.
6. Навигационное устройство по п. 5, при этом навигационный модуль содержит:
второй вычисляющий подмодуль, сконфигурированный, чтобы вычислять текущую высоту транспортного средства согласно информации об изменении формы или информации о давлении в шинах;
второй оценивающий подмодуль, сконфигурированный, чтобы оценивать, превышает ли текущая высота транспортного средства максимальную высоту на маршруте движения; и
второй организационный подмодуль, сконфигурированный, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая высота транспортного средства превышает максимальную высоту на маршруте движения.
7. Навигационное устройство по п. 5, при этом навигационный модуль содержит:
третий оценивающий подмодуль, сконфигурированный, чтобы оценивать согласно информации о давлении в шинах, достигает ли текущее давление в шинах предварительно заданного порогового значения предупреждения; и
третий организационный подмодуль, сконфигурированный, чтобы отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущее давление в шинах транспортного средства достигает предварительно заданного порогового значения предупреждения, и определяется согласно погодной информации, что на маршруте движения присутствует скользкая дорога.
8. Навигационное устройство по п. 5, при этом навигационный модуль дополнительно содержит:
четвертый оценивающий подмодуль, сконфигурированный, чтобы оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку транспортного средства; и
подмодуль вывода, сконфигурированный, чтобы определять, что транспортное средство перегружено, и отправлять предупреждение пользователю, если текущая нагрузка транспортного средства превышает максимальную нагрузку транспортного средства.
9. Навигационное устройство, содержащее:
процессор; и
память, сконфигурированную для хранения инструкций, исполняемых процессором;
при этом процессор конфигурируется, чтобы:
получать информацию о состоянии шин транспортного средства, при этом информация о состоянии шин транспортного средства содержит информацию об изменении формы или информацию о давлении в шинах, причем информация об изменении формы собирается через камеры, предварительно установленные на транспортном средстве в фиксированных положениях, и информация о давлении в шинах собирается посредством предварительно установленного устройства измерения давления в шинах, и собранные данные сохраняются в предварительно установленном запоминающем устройстве или вручную вводятся в предварительно установленное запоминающее устройство пользователем;
получать информацию о дорожных условиях в реальном времени, причем информация о дорожных условиях содержит погодную информацию;
выполнять навигацию по маршруту для транспортного средства согласно информации о состоянии, информации о дорожных условиях и предварительно заданной стратегии навигации;
вычислять текущую нагрузку транспортного средства согласно информации об изменении формы или информации о давлении в шинах;
оценивать, превышает ли текущая нагрузка транспортного средства максимальную нагрузку на маршруте движения, при этом максимальная нагрузка транспортного средства получается посредством получения типа транспортного средства и исследования согласно типу, а тип транспортного средства получается посредством распознавания изображения предварительно установленной камеры или получается посредством идентификации интегральной схемы в транспортном средстве и считывания информации о типе, переносимой в интегральной схеме транспортного средства; и
отправлять предупреждение пользователю и перестраивать безопасный маршрут, если текущая нагрузка транспортного средства превышает максимальную нагрузку на маршруте движения.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 101571401 A, 04.11.2009 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 5939626 A1, 17.08.1999. | |||

