ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к области автономной навигации, а именно к автономной оптической системе локального позиционирования и навигации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В качестве патентных аналогов заявленного изобретения могут быть рассмотрены, например, устройство захвата изображения (см. RU2463663, опубл. 10.10.2012) (1), который содержит: блок формирования изображения, который захватывает цифровое изображение; блок связи, который получает множество элементов дополнительной информации от заранее заданного картографического сервера, который хранит множество элементов дополнительной информации, каждый из которых соответствует объекту, содержащемуся в цифровом изображении, захваченном блоком; блок извлечения информации отображения, который выбирает дополнительную информацию, которая должна быть отображена, среди множества элементов дополнительной информации, полученных блоком связи; и блок обработки отображения с наложением и блок отображения, которые отображают только дополнительную информацию, выбранную блоком среди множества элементов дополнительной информации, с наложением на цифровое изображение, захваченное блоком.
Предложенное в качестве аналога устройство (1) не является системой позиционирования и навигации, а представляет собой элемент геоинформационной системы для отображения и поиска информации с возможностью видеозахвата и сопоставления изображений.
Наиболее близким аналогом, по мнению заявителя, является способ автономной навигации беспилотных летательных аппаратов (см. RU2767477 , опубл. 17.03.2022) (2), который заключается в том, что эталонные и рабочие изображения получают с помощью оптико-электронных систем в инфракрасном диапазоне. Эталонные изображения подготавливают на основе тепловой модели местности путем решения прямой задачи радиационного теплопереноса с учетом плотности потока падающего солнечного излучения, температуры воздуха и высоты полета для заданных участков местности траектории полета и соответствующих периодов астрономического времени. Рабочие изображения регистрируют в процессе съемки в надир с помощью оптико-электронных систем в инфракрасном диапазоне. Полученные эталонные и рабочие инфракрасные изображения подвергают пороговой обработке, в результате которой формируют эталонные и рабочие матрицы опорных точек (контуров) объектов. Осуществляют расчет и находят максимум двумерной матрицы взаимокорреляционной функции, и оценивают географическое положение максимума взаимокорреляционной функции по эталонной матрице опорных точек (контуров). Используют данную оценку положения максимума взаимокорреляционной функции для автономной навигации беспилотных летательных аппаратов по данным измеренных значений курса, крена, тангажа и высоты беспилотного летательного аппарата. Технический результат - повышение точности определения навигационных параметров беспилотного летательного аппарата в условиях некорректной работы приемника глобальных систем спутниковой навигации.
Наиболее близкий аналог (2) описывает автономную оптическую навигационную систему беспилотного летательного аппарата с использованием оптико-электронных систем в инфракрасном диапазоне. При этом съемка производится по подстилающей поверхности (камера направлена в надир) в инфракрасном диапазоне.
Отличие предлагаемой системы состоит в этой части в том, что исходные измерения производятся в оптическом диапазоне, обладающем меньшей контрастностью и большим количеством контурных точек и цветовых переходов, чем инфракрасная (тепловая съемка). Камера оптического диапазона строится вокруг светочувствительной матрицы соответствующего диапазона, которая отличается от инфракрасной камеры и формирует иной информационный поток. В итоге съемка камер разных диапазонов одного и того же ландшафта формируют различные картины, требующие разных эталонных карт и разной обработки.
Следующее отличие – направление визирования камеры. В системе патента (2) направление визирования в надир, то есть строго вниз на подстилающую поверхность. В предлагаемой Системе обзор камеры всенаправленный – при движении по поверхности Земли круговой горизонтальный, к которому при движении в воздухе добавляется визирование с отрицательным тангажом и сканированием с широкой апертурой. Это позволяет использовать трехмерные карты и обрабатывать информационные указатели улиц методами технического зрения и распознавания текста нейронными сетями или корреляционными алгоритмами, что не предполагается в патенте (2). Видеозахват информационных указателей тепловыми или инфра-красными камерами невозможен в отличии от оптическим систем сканирования.
Следующее отличие – картографическая основа систем. Система патента (2) использует двумерные тепловые проекции портрета подстилающей поверхности в виде дискретных пороговых контуров по уровням теплового следа. В предлагаемой Системе должны использоваться трехмерные карты оптической съемок панорам улиц, ландшафтов и иных объектов с контурными линиями и точками. В состав карт может быть включена база локальных информационных указателей типа дорожных, уличных или рекламных вывесок.
Следующее отличие - методы позиционирования. Система патента (2) решает навигационную задачу в локальной декартовой системе координат. В предлагаемой системе привязка к локальной системе является промежуточным шагом, а финальное решение производится с привязкой к уличным адресам.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом заявленного изобретения является повышение универсальности автономной оптической системы локального позиционирования и навигации.
Заявленный технический результат достигается посредством автономной оптической системы локального позиционирования и навигации, алгоритмы которой реализуются отдельными ветвями позиционирования и навигации. По первой ветви позиционирование осуществляется по адресным и информационным указателям, когда из полученного видеоизображения выделяется информация об уличных или рекламных указателях, средствами технического зрения надписи декодируются, распознаются и по базе данных оцениваются координаты или местоположение объекта. По второй ветви позиционирования целевая задача решается по снимку ландшафта без предварительной обработки. По третьей ветви позиционирования задача решается по контурным кадрам, в которой распознавание производится по отпечатку контурных точек и линий, выделенных из исходного изображения. В четвертую ветвь внесена задача навигации методом оптической одометрии, финальное решение позиционирования получается объединением полученных доступных решений соответствующих веток, после чего происходит объединение с навигационным решением при его наличии.
В предпочтительном варианте выполнения система содержит видеокамеру, которая формирует цифровой видеопоток, который по высокоскоростному каналу поступает в модуль первичной обработки потока, модуль первичной обработки принимает информационный поток от видеокамеры и декодирует дискретные кадры видеоизображения, которые передаются на обработку в несколько модулей: модуль сопоставления видеокадров, модуль поиска информационных указателей, модуль первичной фильтрации контрастных контуров и блок интерфейсов внешних навигационных датчиков.
В предпочтительном варианте выполнения система содержит модуль поиска информационных указателей, который предназначен для поиска информационных и рекламных табличек, указателей адресов и прочих идентификаторов, позволяющих локализовать область нахождения объекта или определить его точное местонахождение.
В предпочтительном варианте выполнения система содержит модуль адресной фильтрации, который предназначен для распознавания текстовых информационных и рекламных табличек, адресной информации методами корреляционного анализа или нейросетевыми технологиями, после чего происходит сопоставление с адресной информацией информационно-адресной базы данных.
В предпочтительном варианте выполнения система содержит модуль сопоставления видеокадров, который предназначен для позиционирования путем аналитического сравнения видеокадров с камеры системы и соответствующих кадров с базы локальных изображений, входными параметрами модуля являются кадры съемки видеокамеры и эталонные изображения базы данных.
В предпочтительном варианте исполнения система содержит модуль первичной фильтрации контрастных контуров, который предназначен для подготовки изображения к обработке.
В предпочтительном варианте выполнения система содержит модуль сопоставления контурных кадров – математический аппарат позиционирования, связанный с оценкой местоположения объекта путем сопоставления рисунка контурных линий видеоизображения, полученного от модуля первичной фильтрации контрастных контуров, с изображением из базы данных, на выходе этого модуля получается расчетное местоположение на основе оценки статистических гипотез совпадения контуров эталонного снимка и наблюдаемого.
В предпочтительном варианте выполнения система содержит модуль оптической одометрии, посредством которого производится реализация навигационного решения с оценкой координат и скорости по смещению наблюдаемого контурного изображения с элементами корреляционного анализа, на вход модуля поступает изображение, прошедшее первичную фильтрацию контрастных контуров, что существенно сокращает нагрузку на вычислительные мощности и размер используемой памяти.
В предпочтительном варианте выполнения система содержит модуль локализации препятствий предназначен для обнаружения и оконтуривания препятствий на пути следования объекта, препятствующих выполнения планового маршрута, на вход модуля подаются контурные изображения с камеры, из которых методами корреляционного анализа или искусственного интеллекта выявляют целостные препятствия и локализуют их местонахождения.
В предпочтительном варианте выполнения система содержит модуль интеграции мгновенных и одометрических решений, который предназначен для получения оптимальной взвешенной оценки автономной оптической системы, как решения задачи линейной оптимизации, на вход подаются статистически взвешенные оценки местоположения объекта одометрического решения и коррелированного решения мгновенных решений.
В предпочтительном варианте выполнения система содержит модуль финальной навигационной обработки предназначен для статистической совместной обработки итогового решения оптической системы и измерений внешних навигационных датчиков при условии их доступности и модуль локализации и оптимального поиска изображений в базах данных, который предназначен для оптимизации поиска эталонных изображений в базах данных, при этом информационно-адресная база данных содержит индексированную информацию о локальных адресах и текстовых надписях с привязкой к географической основе, база локальных изображений содержит индексированные снимки панорам улиц, застройки, памятников и прочих визуальных ориентиров с привязкой к географической основе, эта информация предназначена для работы модуля сопоставления, база локальных электронных контуров содержит контурные линии и точки с трехмерной привязкой в географической системе координат, которые воспроизводят контрастные переходы фотографических изображений местности и предназначена для хранений эталонных контуров, используемых модулем сопоставления контурных кадров.
В предпочтительном варианте выполнения система содержит модуль корреляции мгновенных решений, который предназначен для получения интегрированного решения всех модулей позиционирования.
В предпочтительном варианте выполнения система система может быть интегрирована с автопилотом роботизированных наземных транспортных средств, с навигационно-пилотажным комплексом беспилотных и пилотируемых летательных аппаратов самолетной или вертолетной (коптерной) схемы, с открытой навигационной системой.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется рисунками, на которых:
рис.1 – изображен рабочий цикл автономной оптической системы локального позиционирования и навигации в режиме навигации;
рис.2 – изображена схема логики алгоритма автономной оптической системы локального позиционирования и навигации в режиме навигации.
На рис.1: А - съемка и захват изображения, Б - получение измерений сопряженных датчиков (при наличии), В - обработка оптической и измерительной информации Системой, Г- выдача геолокационной информации пользователю.
1 Камера;
2 Модуль первичной обработки потока;
3 Модуль поиска информационных указателей;
4 Модуль сопоставления видеокадров;
5 Модуль первичной фильтрации контрастных контуров;
6 Блок интерфейсов внешних навигационных датчиков (ИНС; ГНСС приемник; магнетометр и др);
7 Модуль адресной фильтрации;
8 Модуль сопоставления контурных кадров;
9 Модуль оптической одометрии;
10 Модуль локализации препятствий;
11 Модуль корреляции мгновенных решений;
12 Модуль интеграции мгновенных и одометрических решений;
13 Модуль финальной навигационной обработки;
14 Модуль локализации и оптимального поиска изображений в базах данных;
15 Информационно-адресная база данных;
16 База локальных изображений;
17 База локальных электронных контуров;
18 Человеко-машинный интерфейс: Ввод-вывод; Отображение навигационной информации; Прокладывание маршрута; Управление режимами.
Эти рисунки не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее будет описан вариант выполнения автономной оптической системы локального позиционирования и навигации, который не ограничивает все варианты осуществления заявленного изобретения.
Под автономностью системы позиционирования понимается способность системы определять местоположение, ориентацию в пространстве и скорость движения объекта, а так же дальнейшее направление движение и маршрут относительно заданной картографической основы без использования внешних источников измерений или информационной поддержки в период навигационных определений.
В современных навигационных устройствах массового бытового и промышленного транспортного применения внешними источниками навигационных измерений являются специализированные радиодальномерные (в отдельных случаях угломерные) системы внешних операторов: спутниковой навигации (GPS/ГЛОНАСС и др.), сетей мобильной связи или локальных беспроводных сетей в режиме триангуляции, импульсно-фазовые радионавигационные системы и другие инфраструктурные объекты, обеспечивающие навигационные сервисы в локальной зоне или глобального характера.
Внешними системами информационной поддержки являются геолокационные сервисы с использованием сети интернет или иных систем информационной поддержки, выдающие расчетные данные позиционирования по запросу пользователя в режиме реального или квазиреального времени. Автономная система навигации и позиционирования подразумевает решение целевой задачи без обращения к системам, перечисленным выше, а так же любым перспективным разработкам навигационных сервисов внешних поставщиков на период применения по целевому назначению.
Под локальным позиционированием понимается способность Системы производить навигационные решения относительно заданной геодезической или картографической основы в заданной локальной зоне, ограниченной способностью Системы хранить и обрабатывать загруженные географические данные. Ограничение зоны связано с максимальным объемом носителя базы географических данных, скоростью обработки и доступностью данных для предварительной загрузки в автономный вычислитель.
Таким образом, все операции определения геолокации объекта осуществляются автономно техническими средствами системы без использования сигналов внешних систем в основном режиме. Основным методом геолокации автономной системы является расчет геолокационных данных по видеоизображению от видеокамеры в режиме реального времени путем сличения видимого изображения с каталогом предварительно загруженных географических данных в локальную базу данных вычислительного устройства системы. Система может быть построена на базе вычислительного устройства смартфона, планшета, промышленного или персонального компьютера, или встроенного вычислителя транспортного средства, а так же устройств специального назначения – видеорегистраторов, одометров и навигаторов. В зависимости от типа вычислителя задача позиционирования решается техническим зрением методом корреляционной обработки или нейросетевым решением. Видеокамера может быть как совмещенная (встроенная) с вычислительным устройством, так и внешней с подключением высокоскоростного интерфейса.
Общий принцип и порядок функционирования автономной оптической системы локального позиционирования и навигации
1. Подготовка системы к работе. На этом этапе производится проверка функционирования устройств и загрузка базы географических данных в вычислитель системы. База данных представляет собой упорядоченный набор геометрических элементов с картографической или геодезической привязкой, описывающих контурные линии, точки ландшафта, и визуальные ориентиры, достаточные для обеспечения однозначного позиционирования в локальной зоне с избыточностью, гарантирующей устойчивость решения.
2. Режим мгновенной геолокации. Мгновенная геолокация используется при включении устройства или запуске Системы для получения одномоментного решения и производится или полным перебором образов базы географических данных и сличение с наблюдаемым видеоизображением, или вводом данных от внешнего источника пользователем или смежной системы навигации. При начальной привязке возможно мгновенное решение целевой задачи – вычисление координат и ориентации объекта.
3. Режим навигационного счисления. Навигационное счислением производится комбинированием цифровой одометрии (по сдвигу видеоизображения) с уточнением геолокации корреляционными или нейросетевыми методами сопоставления видеоизображений. Переход в режим навигации производится из режима мгновенной геолокации. При работе с одометрическими методами навигации существенно сокращается нагрузка на вычислитель и возможен расчет скоростных параметров навигации объекта.
4. Сглаживание решения. Этот шаг является опционным при комплексировании оптического канала измерений с инерциальными или магнитометрическими датчиками Системы при их наличии. Применение инерциальных и магнитометрических датчиков позволяет ускорить работу технического зрения и добиться более высокой точности навигации.
5. Дополнительные функции системы. К дополнительным функциям относятся прокладывание и перерасчет маршрута, локация препятствий и обнаружение опасностей на пути объекта, оповещение об обнаруженных препятствиях с использованием голосовых подсказок или визуальной и текстовой индикации.
На рисунке 1 показан рабочий цикл Системы в режиме навигации
Рис.1. Рабочий цикл Системы в режиме навигации.
Алгоритм функционирования системы
Алгоритм функционирования Системы имплементирует шаги рабочего цикла. Основные его шаги описаны в предыдущем параграфе и составляют, стандартные шаги:
• получение измерений;
• обработка;
• отображение результата.
Таким образом, в состав системы должны входить соответствующие устройства измерений, обработки и отображения. Источником измерений является цифровая видеокамера оптического диапазона с цифровым детерминированным интерфейсом. Обработка производится вычислительными средствами в автономном режиме, используя функциональное программное обеспечение Системы. Отображение результата производится на экране устройства обработки или сопряженного дисплея с использованием цифровой карты ГИС.
Общая логика навигации и позиционирования системы выглядит следующим образом: видеоизображение после предварительной обработки поступает на три расчетные ветки позиционирования и одну ветку навигации. При этом в зависимости от возможности аппаратной платформы и целевого назначения, а так же наличия исходных баз данных некоторые ветви алгоритма могут быть отключены или не задействованы в решении целевой задачи.
Первая ветвь – позиционирование по адресным и информационным указателям, когда из полученного видеоизображения выделяется информация об уличных или рекламных указателях, средствами технического зрения надписи декодируются, распознаются и по базе данных оцениваются координаты или местоположение объекта. В этом режиме позиционирование производится по однократному снимку окружающей обстановки или последовательно от точки к точке.
Вторая ветвь – позиционирование по снимку ландшафта без предварительной обработки. Значимыми ориентирами являются панорамы улиц, промышленных объектов, природные ландшафты, памятники, объекты архитектуры и другие, обладающие уникальностью изображения. Такие снимки обрабатываются алгоритмами технического зрения, в частности нейросетей, путем распознавания и сравнения с соответствующей базой данных.
Третья ветвь – позиционирование контурным кадрам, по своему смыслу похожа на вторую ветвь, только распознавание производится не по исходному снимку, а по отпечатку контурных точек и линий, выделенных из исходного изображения. Исходное изображение преобразуется в набор геометрических примитивов, который сравнивается корреляционными или нейросетевыми методами машинного зрения с аналогичными снимками соответствующей базы данных. Отличие данного метода от метода, реализованного по необработанным снимкам – состоит в том, что это метод более производительный, требует меньшего размера исходной базы данных и обеспечивает более высокую точность позиционирования.
Четвертая ветвь – навигация методом оптической одометрии. Этот метод представляет собой рекуррентный алгоритм навигации по смещению наблюдаемых точек. Он не требует базы данных изображений, но нуждается в начальной привязке местоположения, которая может быть взята из решения позиционирования или от внешнего источника данных.
Финальное решение позиционирования получается объединением полученных доступных решений соответствующих веток, после чего происходит объединение с навигационным решением при его наличии. На основе полученного решения прокладывается и уточняется маршрут с учетом обнаруженных препятствий. После чего выдается на отображение интерфейса пользователя или речевое оповещение. При использовании системы в качестве персонального ассистента для людей с ограниченными возможностями, в частности плохим зрением, инструкции персонального ассистента, интегрированного с системой выдаются с пошаговой частотой и синтезируются с учетом ограниченных возможностей пользователя.
Основным источником оперативной измерительной информации является видеокамера (1) из состава оборудования, как показано на рис.2. Видеокамера (1) формирует цифровой видеопоток, который по высокоскоростному каналу поступает в модуль первичной обработки потока (2). В зависимости от режима работы камеры в потоке поступают или одиночные кадры видеоизображения или полноценный последовательный динамичный видеопоток с автоматической последовательной сменой кадров.
Модуль первичной обработки (2) принимает информационный поток от видеокамеры и декодирует дискретные кадры видеоизображения. Эти кадры передаются на обработку в несколько модулей: модуль сопоставления видеокадров (4), модуль поиска информационных указателей (3) и модуль первичной фильтрации контрастных контуров (5). В зависимости от режима работы, задействованы могут быть не все перечисленные выше модули.
Навигация и позиционирование осуществляется несколькими основными режимами:
• режим одномоментного позиционирования. В этом режиме определение местоположения объекта производится по одномоментному снимку окружающего ландшафта. Одномоментное решение получается модулем корреляции мгновенных решений (11);
• режим последовательного позиционирования. В этом режиме последовательно решается задача одномоментного позиционирования по запросу пользователя или по заданному расписанию;
• режим навигационного счисления. В этом режиме основным вычислительным модулем является модуль оптической одометрии (9). Это режим возможен только при непрерывной видеосъемке. Для одометрического счисления требуется начальное навигационное приближение, которое получается или от режима одномоментного позиционирования или от внешнего навигационного датчика.
Модуль поиска информационных указателей (3) предназначен для поиска информационных и рекламных табличек, указателей адресов и прочих идентификаторов, позволяющих локализовать область нахождения объекта или определить его точное местонахождение. Этот модуль может быть задействован только при наличии информационно-адресной базы данных и присутствует только если в системе реализуется режим навигации по информационным указателям. Этот модуль не производит непосредственно считывание адресной информации, а только локализует на изображении ее возможное размещение. Обнаруженные адресные информационные указатели поступают в модуль адресной фильтрации (7).
Модуль адресной фильтрации (7) предназначен для распознавания текстовых информационных и рекламных табличек, адресной информации методами корреляционного анализа или нейросетевыми технологиями, после чего происходит сопоставление с адресной информацией информационно-адресной базы данных.
Модуль сопоставления видеокадров (8) предназначен для решения задачи позиционирования путем аналитического сравнения видеокадров с камеры системы и соответствующих кадров с базы локальных изображений. Сопоставление производится методами технического зрения, нейросетевыми технологиями. Результатом сравнения является статистическая оценка гипотез совпадения изображений, и при положительном принятии производится геометрический расчет местоположения объекта. Входными параметрами модуля являются кадры съемки видеокамеры и эталонные изображения базы данных.
Модуль первичной фильтрации (5) контрастных контуров предназначен для подготовки изображения к обработке. Любой снимок содержит контрастные контурные линии, и точки которые образуют уникальную комбинацию рисунка снятого кадра. Первичной фильтрацией устраняется избыточность обрабатываемой информацией и сокращается объем размещаемых данных, что обеспечивает значительный прирост быстродействия и увеличивает емкость базы данных.
Модуль сопоставления контурных кадров (8) – математический аппарат позиционирования, связанный с оценкой местоположения объекта путем сопоставления рисунка контурных линий видеоизображения, полученного от модуля первичной фильтрации (5) контрастных контуров, с изображением из базы данных. Алгоритм реализован или на корреляционных методах или нейросетевым решением в зависимости от возможностей аппаратной и системной базы. На выходе этого модуля получается расчетное местоположение на основе оценки статистических гипотез совпадения контуров эталонного снимка и наблюдаемого.
Модуль оптической одометрии (9) – реализация навигационного решения с оценкой координат и скорости по смещению наблюдаемого контурного изображения с элементами корреляционного анализа. На вход модуля поступает изображение, прошедшее первичную фильтрацию контрастных контуров, что существенно сокращает нагрузку на вычислительные мощности и размер используемой памяти. Оптическая одометрия работает в рекуррентном цикле, требующем начальное приближение и непрерывное поступление входящих контурных изображений. В случае приостановки цикла алгоритм требует при очередном запуске реинициализации начального приближения. Начальным приближением может являться решение от модуля позиционирования или от внешнего источника, включая ручной ввод координат и углов ориентации.
Модуль локализации препятствий (10) предназначен для обнаружения и оконтуривания препятствий на пути следования объекта, препятствующих выполнения планового маршрута. На вход модуля подаются контурные изображения с камеры, из которых методами корреляционного анализа или искусственного интеллекта выявляют целостные препятствия и локализуют их местонахождения. Далее при контроле выполнения маршрута происходит перерасчет в обход препятствия.
Модуль корреляции мгновенных решений (11) предназначен для получения интегрированного решения всех модулей позиционирования. В зависимости от конфигурации Системы, состав модулей позиционирования может быть различным, и если их больше одного, то требуется объединение этих решений в одно комбинированное. Комбинирование решение производится простейшим оптимальным фильтром.
Блок интерфейсов внешних навигационных датчиков (6). Система не является замкнутой алгоритмической и аппаратной структурой и допускает масштабирование, добавляя подключения с внешними навигационными датчиками, не являющимися структурными элементами системы. Эти интерфейсы обеспечивают информационный обмен, позволяющий улучшить обусловленность задачи за счет повышения избыточности данных, которые могут использоваться как для повышения точности и надежности интегрированного решения, так и для начальных приближений и статистического контроля целостности измерений и решений.
Модуль интеграции мгновенных и одометрических решений (12) предназначен для получения оптимальной взвешенной оценки автономной оптической системы, как решения задачи линейной оптимизации. На вход подаются статистически взвешенные оценки местоположения объекта одометрического решения и коррелированного решения мгновенных решений. Это позволяет повысить точность и надежность навигационного решения, снижая вероятность выбросов и вырождения решений.
Модуль финальной навигационной обработки (13) предназначен для статистической совместной обработки итогового решения оптической системы и измерений внешних навигационных датчиков при условии их доступности. Такая обработка позволят уточнить и сгладить решение, исключить выбросы решений, повысить устойчивость решения относительно немоделируемых непрогнозируемых искажений и плохой обусловленности начальных условий.
Модуль локализации и оптимального поиска изображений (14) в базах данных предназначен для оптимизации поиска эталонных изображений в базах данных. Учитывая нагруженность алгоритмов оптической обработки изображений, полный перебор эталонной информации с последующей обработкой, приведет к большим задержкам цикла обработки. Этот модуль осуществляет поиск по прогнозу местоположения, расширяя область поиска в базе данных до обнаружения эталонного изображения.
Информационно-адресная база данных (15) содержит индексированную информацию о локальных адресах и текстовых надписях с привязкой к географической основе. По этим надписям Система может осуществлять грубое позиционирование по уличным указателям и рекламным надписям. Эта база данных предназначена для работы модуля адресной фильтрации.
База локальных изображений (16) содержит индексированные снимки панорам улиц, застройки, памятников и прочих визуальных ориентиров с привязкой к географической основе. Эта информация предназначена для работы модуля сопоставления видеокадров.
База локальных электронных контуров (17) содержит контурные линии и точки с трехмерной привязкой в географической системе координат, которые воспроизводят контрастные переходы фотографических изображений местности. Эта база предназначена для хранений эталонных контуров, используемых модулем сопоставления контурных кадров.
Человеко-машинный интерфейс (18) являет собой графическую оболочку для управления режимами, подготовки Системы к работе и отображения и оповещения пользователя о текущей навигационной обстановке. К управлению режимами относится выбор методов позиционирования и сопряженных устройств, прокладка маршрута, управление работой отображения и голосового ассистента. Подготовка системы к работе сводится к загрузке картографической информации, проверке целостности данных и готовности изделия к работе в целом. Оповещение пользователя о текущей навигационной обстановке производится как в графическом режиме с отображением картографической основы, проложенного маршрута, так и с использованием голосового ассистента, сообщающего текущее местоположение пользователя и оповещающего о направлении движении по маршруту и возможных препятствиях или особых ситуациях на пути.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Область применения данной автономной оптической системы локального позиционирования и навигации, – персональная и транспортная навигация при передвижении в условиях городской застройки, урбанизированных районах и ландшафтных зонах с визуальными ориентирами. Отдельным приложением является персональный электронный ассистент для людей с ограниченными возможностями, в том числе плохим зрением, когда система не только обеспечивает локацию объекта, но и предупреждения о препятствиях на пути. Система может быть интегрирована как с автопилотом роботизированных наземных транспортных средств и, в перспективе, навигационно-пилотажным комплексом беспилотных и пилотируемых летательных аппаратов самолетной или вертолетной (коптерной) схемы, так и с открытой навигационной системой, образуя обеспечивая дополнительный поток навигационной и ситуационной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ НАВИГАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2767477C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2559194C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2022 |
|
RU2812755C2 |


Изобретение относится к области автономной навигации, а именно к автономной оптической системе локального позиционирования и навигации. Автономная оптическая система локального позиционирования и навигации содержит первую ветвь позиционирования по адресным и информационным указателям, когда из полученного видеоизображения выделяется информация об уличных или рекламных указателях, средствами технического зрения надписи декодируются, распознаются и по базе данных оцениваются координаты или местоположение объекта, вторую ветвь позиционирования по снимку ландшафта без предварительной обработки, третью ветвь позиционирования по контурным кадрам, в которой распознавание производится по отпечатку контурных точек и линий, выделенных из исходного изображения и четвертую ветвь навигации методом оптической одометрии, финальное решение позиционирования получается объединением полученных доступных решений соответствующих веток, после чего происходит объединение с навигационным решением при его наличии. Техническим результатом изобретения является расширение функциональных возможностей автономной системы позиционирования и навигации. 6 з.п. ф-лы, 2 ил.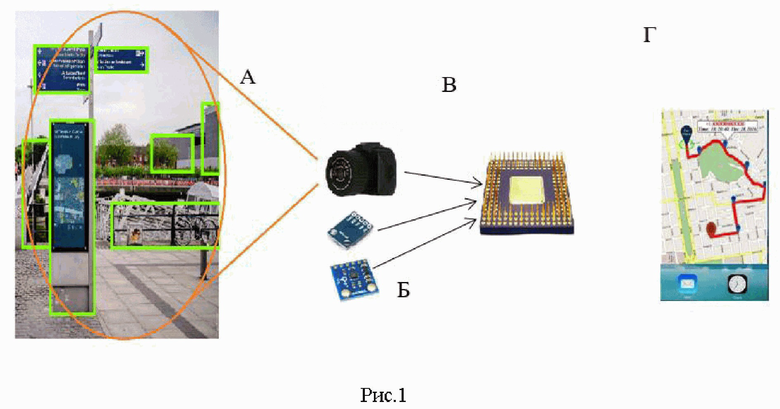
1. Автономная оптическая система локального позиционирования и навигации, содержащая видеокамеру, формирующую цифровой видеопоток, который по высокоскоростному каналу поступает в модуль первичной обработки потока, декодирующий дискретные кадры видеоизображения и передающий видеоизображения на обработку в модуль сопоставления видеокадров, модуль первичной фильтрации контрастных контуров и блок интерфейсов внешних навигационных датчиков, при этом система содержит модуль оптической одометрии, связанный с модулем первичной фильтрации контрастных контуров, соединенный с видеокамерой модуль локализации препятствий, модуль финальной навигационной обработки, и выполненная с возможностью интеграции с автопилотом роботизированных наземных транспортных средств, с навигационно-пилотажным комплексом беспилотных и пилотируемых летательных аппаратов самолетной или вертолетной схемы, с открытой навигационной системой, а также с возможностью реализации первой ветви позиционирования по адресным и информационным указателям, второй ветви позиционирования по снимку ландшафта без предварительной обработки, третьей ветви позиционирования по контурным кадрам, четвёртой ветви навигации методом оптической одометрии, а также объединения полученных доступных решений соответствующих веток позиционирования с навигационным решением.
2. Автономная оптическая система по п.1, отличающаяся тем, что содержит модуль поиска информационных указателей, соединённый с модулем первичной обработки потока и предназначенный для поиска информационных и рекламных табличек, указателей адресов, позволяющих локализовать область нахождения объекта или определить его точное местонахождение.
3. Автономная оптическая система по любому из пп.1, 2, отличающаяся тем, что содержит модуль адресной фильтрации, соединённый с модулем поиска информационных указателей и предназначенный для распознавания текстовых информационных и рекламных табличек, адресной информации методами корреляционного анализа или нейросетевыми технологиями, и сопоставления с адресной информацией информационно-адресной базы данных.
4. Автономная оптическая система по любому из пп.1, 2, отличающаяся тем, что содержит модуль сопоставления контурных кадров, соединённый с модулем первичной фильтрации контрастных контуров и обеспечивающий оценку местоположения объекта путем сопоставления рисунка контурных линий видеоизображения, полученного от модуля первичной фильтрации контрастных контуров, с изображением из базы данных.
5. Автономная оптическая система по любому из пп.1, 2, отличающаяся тем, что содержит модуль интеграции мгновенных и одометрических решений, соединенный с модулем оптической одометрии и предназначенный для получения оптимальной взвешенной оценки автономной оптической системы, на вход которого подаются статистически взвешенные оценки местоположения объекта.
6. Автономная оптическая система по любому из пп.1, 2, отличающаяся тем, что содержит модуль локализации и оптимального поиска изображений, соединённый с информационно-адресной базой данных, которая включает индексированную информацию о локальных адресах и текстовых надписях с привязкой к географической основе, с базой локальных изображений, включающей индексированные снимки панорам улиц, застройки, памятников с привязкой к географической основе, с базой локальных электронных контуров, включающей контурные линии и точки с трехмерной привязкой в географической системе координат, которые воспроизводят контрастные переходы фотографических изображений местности, и предназначенной для хранения эталонных контуров для модуля сопоставления контурных кадров.
7. Автономная оптическая система по любому из предыдущих пунктов, отличающаяся тем, что содержит модуль корреляции мгновенных решений, соединенный с модулем интеграции мгновенных и одометрических решений и предназначенный для получения интегрированного решения всех модулей позиционирования.
| СПОСОБ НАВИГАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2767477C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| US 0009846046 B2, 19.12.2017 | |||
| US 20170291301 A1, 12.10.2017 | |||
| JP 0005184217 B2, 17.04.2013. | |||

