Изобретение относится к измерительной технике и может быть использовано в качестве элемента в системах стабилизации и навигации. Оно может найти применение в приборах измерения механических величин компенсационного типа.
Наиболее близким по технической сущности является компенсационный акселерометр (Патент RU №2210781 C2, кл. 7 G01Р 15/13, опубл. 20.08.2003 г.), содержащий чувствительный элемент акселерометра, датчик положения, усилитель, магнитоэлектрический силовой преобразователь, компенсационную катушку, которая подключена к выходу усилителя, причем к компенсационной катушке подключена цепь из последовательно соединенных первого и второго резисторов, а первый резистор зашунтирован конденсатором. К точке соединения компенсационной катушки, с цепью из последовательно соединенных первого и второго резисторов, подключено интегродифференцирующее звено.
Недостатком компенсационного акселерометра является малая полоса пропускания и невысокая точность, которая ограничена коэффициентом усиления по разомкнутому контуру.
Наиболее близким по технической сущности является устройство для измерения ускорений (Патент RU №2400761, кл. G01P 15/13, опубл. 27.09.2010 г.), содержащее чувствительный элемент, датчик положения, выход которого соединен с входом усилителя переменного тока, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь с выхода датчика положения, образованную отрицательную обратную связь, с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя, последовательно соединенные по информационным входам усилитель переменного тока, который выполнен со стабильным коэффициентом усиления, первый логический элемент, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, прецизионный релейный элемент, сглаживающий фильтр, широкополосный фильтр второго порядка
(где T1, ζ1, ζ2 - постоянная времени фильтра, относительные коэффициенты демпфирования, s - оператор преобразования Лапласа, причем ζ2>ζ1) и первый преобразователь напряжение-ток, интегратор, вход которого соединен с одним из выходов схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, и второй преобразователь напряжение-ток, вход которого соединен с выходом интегратора, а выход с входом магнитоэлектрического силового преобразователя, в устройстве генератор опорного напряжения соединен как с датчиком положения, так и со схемой ИСКЛЮЧАЮЩЕЕ ИЛИ через второй логический элемент, и выход со сглаживающего фильтра является аналоговым выходом устройства для измерения ускорений.
Недостатком устройства для измерения ускорений является малая полоса пропускания и невысокая точность, которая ограничена коэффициентом усиления по разомкнутому контуру.
Задачей настоящего изобретения является расширение полосы пропускания компенсационного акселерометра и повышение точности измерения.
Это достигается тем, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, отрицательную обратную связь, реализованную с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя через последовательно соединенных по информационным входам усилитель переменного тока со стабильным коэффициентом усиления, первый логический элемент, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, прецизионный релейный элемент, сглаживающий фильтр, широкополосный фильтр второго порядка, первый преобразователь напряжение-ток, а также генератор опорного напряжения, соединенный как с входом датчика положения, так и с входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ через второй логический элемент, и с входом прецизионного релейного элемента, интегрирующую отрицательную обратную связь, интегратор, второй преобразователь напряжение-ток, в интегрирующую отрицательную обратную связь введены низкочастотный фильтр, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход интегратора, и пороговый элемент с зоной неоднозначности, с выхода интегратора на один из входов магнитоэлектрического силового преобразователя через второй преобразователь напряжение-ток. Выход сглаживающего фильтра является аналоговым выходом, а выход с порогового элемента с зоной неоднозначности дискретным выходом компенсационного акселерометра.
Введение в устройство для измерения ускорений двух отрицательных обратных связей, одна из которых содержит сглаживающий и широкополосный фильтр второго порядка, а другая содержит низкочастотный фильтр, интегратор и пороговый элемент с зоной неоднозначности позволило реализовать компенсационный акселерометр со значительным коэффициентом передачи по разомкнутому контуру, повысить точность измерения и расширить полосу пропускания.
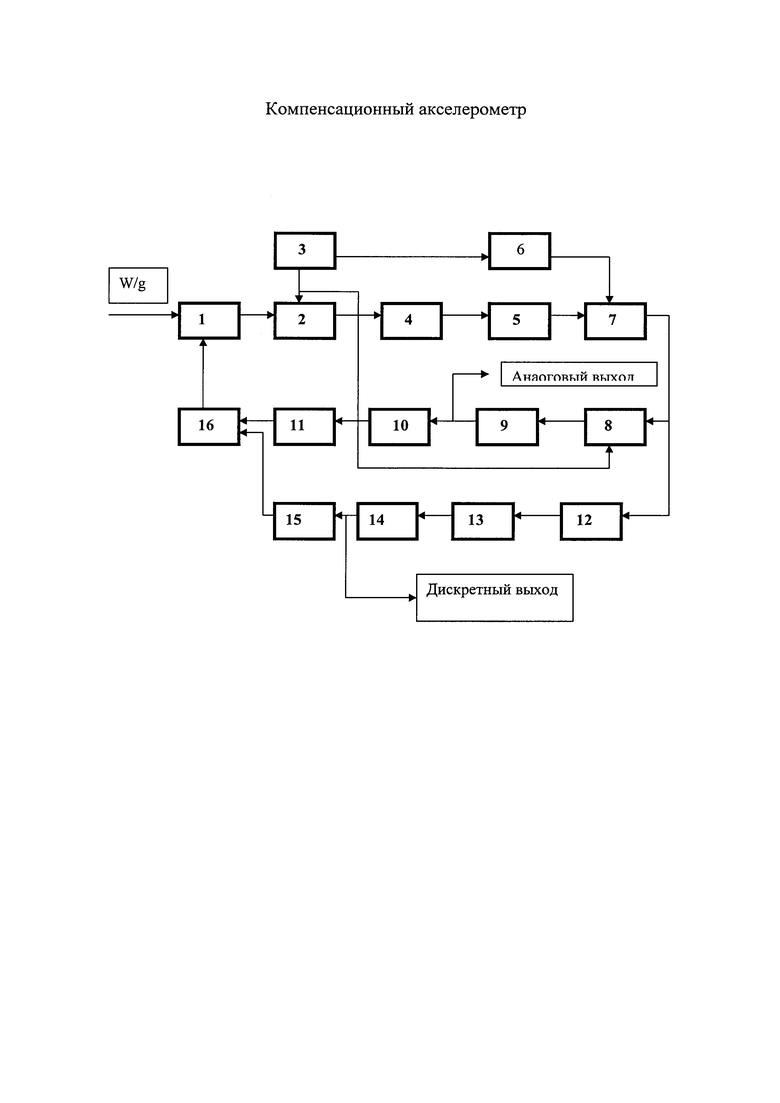
На фиг.1 изображена функциональная схема компенсационного акселерометра.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое положение которого фиксирует датчик положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения 3. Выходная обмотка датчика положения 2 соединена с усилителем переменного тока со стабильным коэффициентом усиления 4, выход которого соединен с входом первого логического элемента 5. Вход второго логического элемента 6 соединен с одним из выходов генератора опорного напряжения 3, а выход соединен с одним из входов схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7, другой вход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7 соединен с выходом первого логического элемента 5. Один из выходов схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7 соединен с входом прецизионного релейного элемента 8. Один из входов прецизионного релейного элемента 8 соединен с выходом генератора опорного напряжения 3. Выход прецизионного релейного элемента 8 соединен с входом сглаживающего фильтра 9. Выход сглаживающего фильтра 9 соединен с входом широкополосного фильтра второго порядка 10. Выход широкополосного фильтра второго порядка 10 соединен с входом первого преобразователя напряжение-ток 11. Один из выходов схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7 соединен с входом низкочастотного фильтра 12, выход которого соединен с входом интегратора 13. Выход интегратора 13 соединен с входом порогового элемента с зоной неоднозначности 14, выход которого соединен с входом второго преобразователя напряжение-ток 15. Выходы с первого и второго преобразователей напряжение-ток 11, 15 соединены с входом магнитоэлектрического силового преобразователя 16. Магнитоэлектрический силовой преобразователь 16 установлен на чувствительном элементе 1. Выходы порогового элемента 14 сглаживающего фильтра 9 являются соответственно дискретным и аналоговыми выходами компенсационного акселерометра.
Внутреннее содержание генератора опорного напряжения, логических элементов, схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, усилителя, сглаживающего, низкочастотного фильтров и широкополосного фильтра второго порядка, прецизионного релейного элемента, интегратора, порогового элемента с зоной неоднозначности и преобразователя напряжение-ток приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т. 1-3, 1993.
Работа компенсационного акселерометра осуществляется следующим образом. Отклонение чувствительного элемента 1, под действием ускорения, фиксируется датчиком положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения 3. Относительно несущей частоты выходной сигнал с датчика положения 2 имеет фазу 0° либо 180°. Выходной сигнал с датчика положения 2 усиливается усилителем переменного тока 4 со стабильным коэффициентом усиления. С выхода первого логического элемента 5 входной сигнал, с усилителя 4, представляется в виде сигнала прямоугольной формы с частотой генератора опорного напряжения 3. Для выделения фазы отклонения чувствительного элемента 1 предусмотрен второй логический элемент 6, на вход которого подается сигнал с генератора опорного напряжения 3. На выходе второго логического элемента 6 будет сигнал аналогичный по форме сигналу с первого логического элемента 5. Выходные сигналы с 5 и 6, сдвинутые по фазе, поступают на входы схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7 (схема сложения по модулю "2"), осуществляющей операцию логического сложения. Если сигналы с логических элементов 5 и 6 имеют нулевой фазовый сдвиг, то на выходе схемы 7 имеем логический "0", если же сигналы с 5 и 6 имеют фазовый сдвиг, отличный от нуля, то на выходе 7 будет логическая "1". Форма выходного сигнала с 7 аналогична форме сигналов с логических элементов 5 и 6. Выходной сигнал с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7 поступает на вход прецизионного релейного элемента 8, включенного в одну из отрицательных обратных связей. Переключение прецизионного релейного элемента 8 происходит на несущей частоте генератора опорного напряжения 3, и при этом осуществляется фиксация уровня сигнала с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 7. Сглаживающий фильтр 9 осуществляет выделение уровня сигнала, с выхода прецизионного релейного элемента 8, в соответствии с фазой отклонения чувствительного элемента 1. Широкополосный фильтр второго порядка 10 обеспечивает заданную форму переходного процесса в компенсационном акселерометре и включен на выход сглаживающего фильтра 9. Выходной сигнал с широкополосного фильтра второго порядка 10, через первый преобразователь напряжение-ток 11, подается на один из входов магнитоэлектрического силового преобразователя 16. Для обеспечения астатизма в компенсационном акселерометре введена интегрирующая отрицательная обратная связь. Интегрирующая отрицательная обратная связь реализована с выхода датчика положения 2 на вход интегратора 13, через последовательно соединенные по информационным входам усилитель переменного тока со стабильным коэффициентом усиления 4, первый логический элемент 5, схему ИСКЛЮЧАЮЩЕЕ ИЛИ 7 и низкочастотный фильтр 12. Выход интегратора 13 соединен с одним из входов магнитоэлектрического силового преобразователя 16 через второй преобразователь напряжение-ток 15 и пороговый элемент с зоной неоднозначности 14. Интегратор 13 и низкочастотный фильтр 12 обеспечивают астатизм по отклонению в компенсационном акселерометре. Магнитоэлектрический силовой преобразователь 16 развивает момент, который компенсирует угловое отклонение чувствительного элемента 1, вызванное действием ускорения. Выход со сглаживающего фильтра 9 является аналоговым выходом, а выход с порогового элемента с зоной неоднозначности 14 является дискретным выходом компенсационного акселерометра,
Введение двух отрицательных обратных связей, одна из которых содержит прецизионный релейный элемент, сглаживающий и широкополосный фильтры, а другая низкочастотный фильтр, интегратор, пороговый элемент с зоной неоднозначности позволило создать компенсационный акселерометр, в котором можно реализовать значительный коэффициент усиления по разомкнутому контуру, без потери устойчивости. Реализация отрицательных обратных связей, одна из которых является интегрирующей, позволило получить компенсационный акселерометр с астатизмом по отклонению, расширить полосу пропускания и повысить точность измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный акселерометр | 2018 |
|
RU2676217C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2400761C1 |
| Акселерометр | 2018 |
|
RU2688880C1 |
| Компенсационный акселерометр | 2018 |
|
RU2688878C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2754203C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2397497C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2541720C1 |
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2541716C1 |
| Акселерометр | 2024 |
|
RU2823442C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2447451C1 |
Изобретение, компенсационный акселерометр, предназначено для применения в системах стабилизации и навигации. Компенсационный акселерометр дополнительно содержит интегрирующую отрицательную обратную связь, в которую введены низкочастотный фильтр, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход интегратора, и пороговый элемент с зоной неоднозначности, с выхода интегратора на один из входов магнитоэлектрического силового преобразователя через второй преобразователь напряжение-ток, кроме того, выход сглаживающего фильтра является аналоговым выходом, а выход с порогового элемента с зоной неоднозначности - дискретным выходом компенсационного акселерометра. Технический результат – повышение точности измерения и расширение полосы пропускания. 1 ил.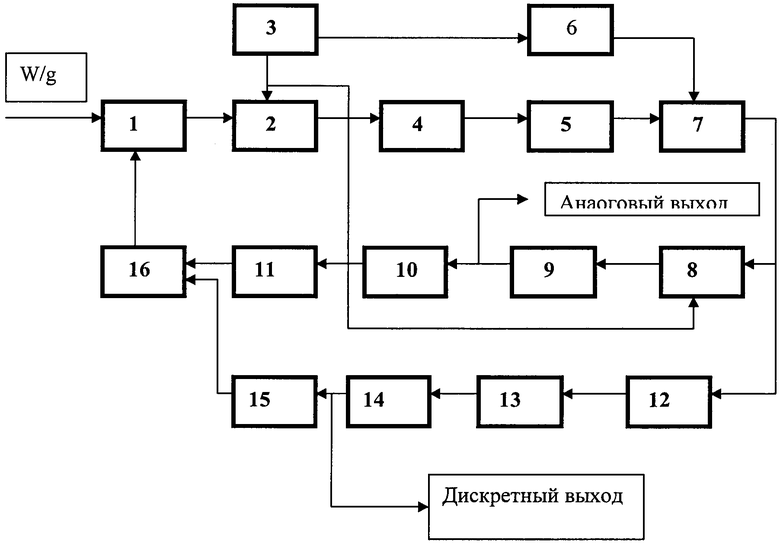
Компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, отрицательную обратную связь, реализованную с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам усилитель переменного тока со стабильным коэффициентом усиления, первый логический элемент, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, прецизионный релейный элемент, сглаживающий фильтр, широкополосный фильтр второго порядка, первый преобразователь напряжение-ток, а также генератор опорного напряжения соединенный как с входом датчика положения, так и с входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ через второй логический элемент, и с входом прецизионного релейного элемента, интегрирующую отрицательную обратную связь, интегратор, второй преобразователь напряжение-ток, отличающийся тем, что в интегрирующую отрицательную обратную связь введены низкочастотный фильтр, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход интегратора, и пороговый элемент с зоной неоднозначности, с выхода интегратора на один из входов магнитоэлектрического силового преобразователя через второй преобразователь напряжение-ток, кроме того, выход сглаживающего фильтра является аналоговым выходом, а выход с порогового элемента с зоной неоднозначности - дискретным выходом компенсационного акселерометра.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2400761C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2541720C1 |
| Трехкомпонентный акселерометр | 1983 |
|
SU1137397A1 |
| US 6360602 B1, 26.03.2002. | |||

