Изобретение относится к измерительной технике и может быть использовано в качестве элемента в системах стабилизации и навигации. Оно может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (а.с. №1795374 А1, кл. G01P 15/13, 15/08, 1993 г.), содержащее чувствительный элемент, датчик положения, усилитель и магнитоэлектрический силовой преобразователь. Компенсационная катушка магнитоэлектрический силовой преобразователь, которого подключена к выходу усилителя, причем к компенсационной катушке подключена цепь из последовательно соединенных первого и второго резисторов, а первый резистор зашунтирован конденсатором.
Недостатком компенсационного акселерометра является погрешность, обусловленная включением конденсатора параллельно одному из резисторов.
Наиболее близким по технической сущности является устройство для измерения ускорений (патент RU №2400761, кл. G01P 15/13, опубл. 27.09.2010 г.), содержащее чувствительный элемент и датчик положения, выход которого соединен с входом усилителя переменного тока, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь. Отрицательная обратную связь образована с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам усилитель переменного тока, первый логический элемент, схему исключающее "или", прецизионный релейный элемент, сглаживающий фильтр, широкополосный фильтр второго порядка  (где T1, ς1, ς2 - постоянная времени фильтра, относительные коэффициенты демпфирования, s - оператор преобразования Лапласа, причем ς2>ς1) и первый преобразователь напряжение-ток. Интегратор, вход которого соединен с одним из выходов схемы исключающее "или", и второй преобразователь напряжение-ток, вход которого соединен с выходом интегратора, а выход с входом магнитоэлектрического силового преобразователя. Генератор опорного напряжения соединен как с датчиком положения, так и со схемой исключающее "или" через второй логический элемент, и выход со сглаживающего фильтра является аналоговым выходом устройства для измерения ускорений.
(где T1, ς1, ς2 - постоянная времени фильтра, относительные коэффициенты демпфирования, s - оператор преобразования Лапласа, причем ς2>ς1) и первый преобразователь напряжение-ток. Интегратор, вход которого соединен с одним из выходов схемы исключающее "или", и второй преобразователь напряжение-ток, вход которого соединен с выходом интегратора, а выход с входом магнитоэлектрического силового преобразователя. Генератор опорного напряжения соединен как с датчиком положения, так и со схемой исключающее "или" через второй логический элемент, и выход со сглаживающего фильтра является аналоговым выходом устройства для измерения ускорений.
Недостатком устройства для измерения ускорений является малая полоса пропускания и невысокая точность, которая ограничена коэффициентом усиления по разомкнутому контуру.
Технической задачей настоящего изобретения является расширение полосы пропускания компенсационного акселерометра и повышение точности измерения.
Это достигается тем, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, выход которого соединен с одним из входов схемы исключающее "или" через усилитель и первый логический элемент, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь, генератор опорного напряжения выходы которого соединены как с датчиком положения, так с одним из входов схемы исключающее "или", через второй логический элемент, преобразователь уровня соединенный с входом реверсивного двоичного счетчика через пару ждущих синхронных генераторов, схему синхронизации, интегратор, введены релейный элемент с зоной неоднозначности с выхода схемы исключающее "или", на вход преобразователя уровня, и интегратор с одного из входов усилителя на его выход, кроме того, один из выходов релейного элемента с зоной неоднозначности соединен с входом магнитоэлектрического силового преобразователя, дополнительные входы релейного элемента с зоной неоднозначности и ждущих синхронных генераторов соединены с выходом схемы синхронизации, а отрицательная обратная связь реализована с выхода усилителя на вход датчика момента через последовательно соединенными по информационным входам первый логический элемент, схему исключающее "или", релейный элемент с зоной неоднозначности, и выход реверсивного двоичного счетчика является цифровым выходом устройства.
Введение в компенсационный акселерометр интегратора и релейного элемента с зоной неоднозначности, в отрицательную обратную связь, позволило реализовать в устройстве автоколебательный режим, астатизм второго порядка, значительный коэффициент передачи по разомкнутому контуру, а также повысить точность измерения и расширить полосу пропускания.
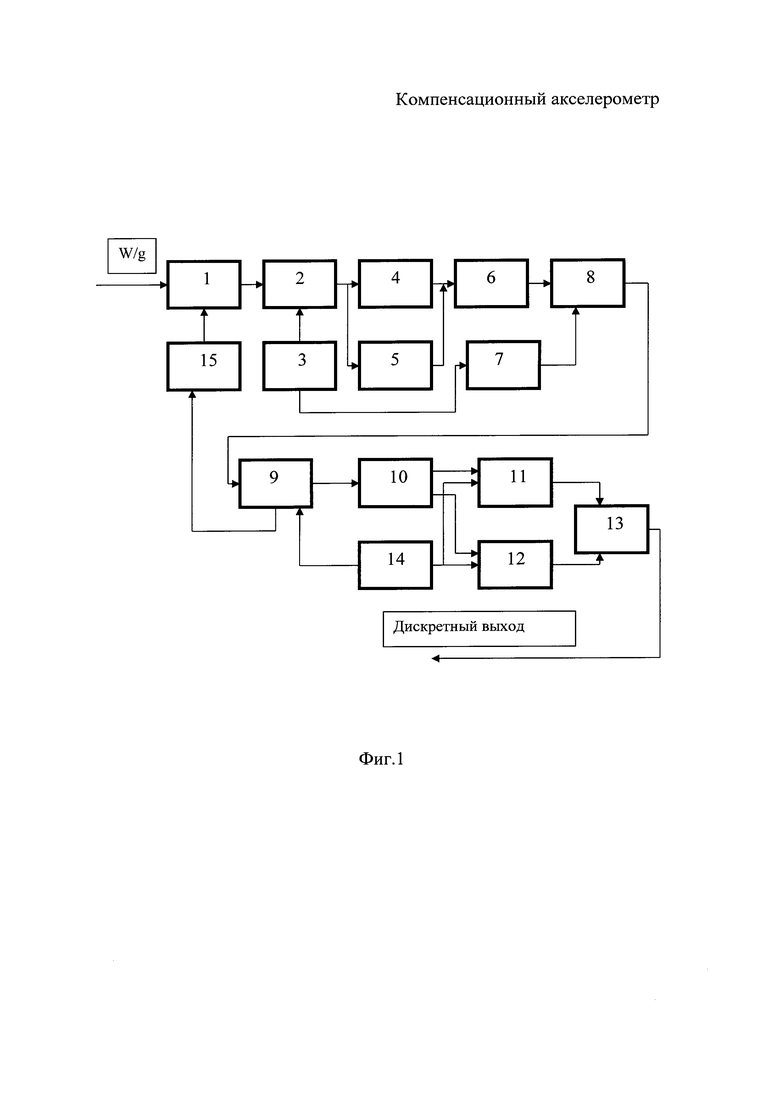
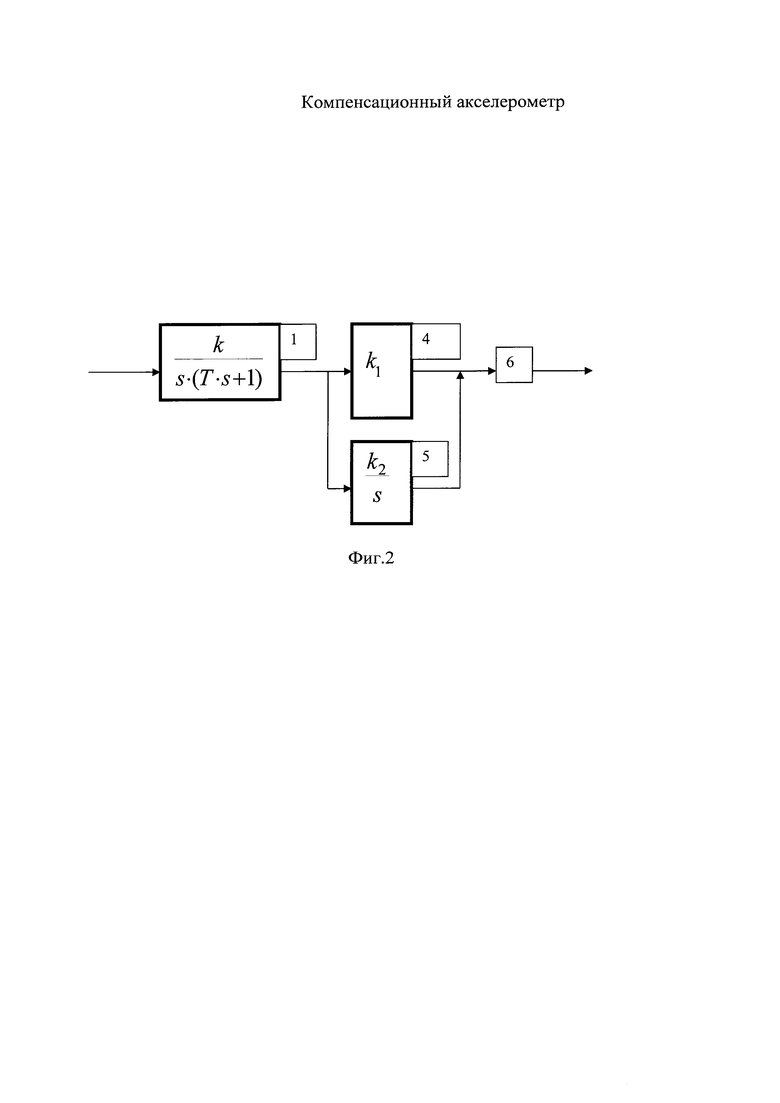
На фиг. 1 изображена функциональная схема компенсационного акселерометра; на фиг. 2 изображена схема чувствительного элемента с усилителем и интегратором.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое положение которого определяет датчик положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения (ГОН) 3. Выход датчика положения 2 соединен с входом усилителя 4. Один из входов усилителя 4 соединен с выходом усилителя 4 через интегратор 5. Выход усилителя 4 соединен с входом первого логического элемента 6. Вход второго логического элемента 7 соединен с одним из выходов генератора опорного напряжения 3, а выход второго логического элемента 7 соединен с одним из входов схемы исключающее "или" 8. Выход схемы исключающее "или" 8 соединен с входом релейного элемента с зоной неоднозначности 9. Один из выходов релейного элемента с зоной неоднозначности 9 соединен с входом преобразователя уровня 10. Выход преобразователя уровня 10 соединен с входами пары ждущих синхронных генераторов (ЖСГ) 11 и 12. Выходы пары ЖСГ 11 и 12 соединены с входами реверсивного двоичного счетчика 13. Дополнительные входы релейного элемента с зоной неоднозначности 9 и пары ЖСГ 11 и 12 соединены с выходами схемы синхронизации 14. Один из выходов релейного элемента с зоной неоднозначности 9 соединен с входом магнитоэлектрического силового преобразователя 15. Магнитоэлектрический силовой преобразователь 15 соединен с чувствительным элементом 1. Выход реверсивного двоичного счетчика 13 является дискретным выходом компенсационного акселерометра.
Внутреннее содержание генераторов, логических элементов, преобразователя уровня, схемы исключающее "или", усилителя, релейного элемента, интегратора приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т. 1-3, 1993.
Работу предложенного компенсационного акселерометра можно пояснить следующим образом. Отклонение чувствительного элемента (ЧЭ) 1, (передаточная функция ЧЭ имеет вид  , где k - коэффициент передачи ЧЭ, Т - постоянная времени, S - преобразователь Лапласа, фиг. 2), под действием ускорения (W/g), фиксируется датчиком положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения (ГОН) 3. Выходной сигнал с датчика положения 2 имеет фазу 0° либо 180° относительно несущей частоты (ГОН)-3. Выходной сигнал с датчика положения 2 усиливается усилителем 4 со стабильным коэффициентом усиления. С выхода первого логического элемента 6, выходной сигнал с усилителя 4, представляется в виде сигнала прямоугольной формы с частотой (ГОН) 3. Для выделения фазы отклонения чувствительного элемента 1 предусмотрен второй логический элемент 7, на вход которого подается сигнал с (ГОН) 3. На выходе второго логического элемента 7 будет сигнал аналогичный по форме сигналу с первого логического элемента 6. Сигналы с логических элементов 6 и 7, сдвинутые по фазе, поступают на входы схемы исключающее "или" -8 (схема сложения по модулю "2"), осуществляющей операцию логического сложения. Если сигналы с логических элементов 6 и 7 имеют нулевой фазовый сдвиг отклонения чувствительного элемента 1, то на выходе схемы исключающее "или" -8 имеем логический "0", если же сигналы с элементов 6 и 7 имеют фазовый сдвиг отличный от нуля, то на выходе схемы исключающее "или"8 будет логическая "1". Форма выходного сигнала с выхода схемы исключающее "или" 8 аналогична форме сигналов с логических элементов 6 и 7. Выходной сигнал с выхода схемы исключающее "или" -8 поступает на вход релейного элемента с зоной неоднозначности 9, включенного в отрицательную обратную связь. Для обеспечения астатизма в компенсационный акселерометр введен интегратор 5 с одного из входов усилителя 4 на выход усилителя 4. (Передаточную функцию усилителя 4 с интегратором 5 (рис. 1) можно записать в виде
, где k - коэффициент передачи ЧЭ, Т - постоянная времени, S - преобразователь Лапласа, фиг. 2), под действием ускорения (W/g), фиксируется датчиком положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения (ГОН) 3. Выходной сигнал с датчика положения 2 имеет фазу 0° либо 180° относительно несущей частоты (ГОН)-3. Выходной сигнал с датчика положения 2 усиливается усилителем 4 со стабильным коэффициентом усиления. С выхода первого логического элемента 6, выходной сигнал с усилителя 4, представляется в виде сигнала прямоугольной формы с частотой (ГОН) 3. Для выделения фазы отклонения чувствительного элемента 1 предусмотрен второй логический элемент 7, на вход которого подается сигнал с (ГОН) 3. На выходе второго логического элемента 7 будет сигнал аналогичный по форме сигналу с первого логического элемента 6. Сигналы с логических элементов 6 и 7, сдвинутые по фазе, поступают на входы схемы исключающее "или" -8 (схема сложения по модулю "2"), осуществляющей операцию логического сложения. Если сигналы с логических элементов 6 и 7 имеют нулевой фазовый сдвиг отклонения чувствительного элемента 1, то на выходе схемы исключающее "или" -8 имеем логический "0", если же сигналы с элементов 6 и 7 имеют фазовый сдвиг отличный от нуля, то на выходе схемы исключающее "или"8 будет логическая "1". Форма выходного сигнала с выхода схемы исключающее "или" 8 аналогична форме сигналов с логических элементов 6 и 7. Выходной сигнал с выхода схемы исключающее "или" -8 поступает на вход релейного элемента с зоной неоднозначности 9, включенного в отрицательную обратную связь. Для обеспечения астатизма в компенсационный акселерометр введен интегратор 5 с одного из входов усилителя 4 на выход усилителя 4. (Передаточную функцию усилителя 4 с интегратором 5 (рис. 1) можно записать в виде  , где k2 - коэффициент передачи интегратора 5, k1- коэффициент передачи усилителя 4,
, где k2 - коэффициент передачи интегратора 5, k1- коэффициент передачи усилителя 4,  постоянная времени). Если обеспечить равенство Т=Т1, то можно реализовать, в компенсационном акселерометре, астатизм второго порядка, (передаточную функцию разомкнутой системы компенсационного акселерометра, содержащую чувствительный элемент 1, усилитель 4 и интегратор 5, введенный в прямую цепь усилителя 4 можно записать в виде:
постоянная времени). Если обеспечить равенство Т=Т1, то можно реализовать, в компенсационном акселерометре, астатизм второго порядка, (передаточную функцию разомкнутой системы компенсационного акселерометра, содержащую чувствительный элемент 1, усилитель 4 и интегратор 5, введенный в прямую цепь усилителя 4 можно записать в виде:  .
.
Из анализа передаточной функции разомкнутой системы следует, что введение в структуру компенсационного акселерометра интегратора, в прямую связь усилителя, позволяет реализовать устройство содержащее только интегрирующие звенья. Это позволяет обеспечить астатизм и режим автоколебаний, совместно релейным элементом с зоной неоднозначности. Выходной сигнал с выхода схемы исключающее "или" -8 поступает на один входов релейного элемента с зоной неоднозначности 9. В релейном элементе с зоной неоднозначности 9 происходит сравнение сигнала с выхода схемы, исключающее "или" -8 с сигналом, выделенного стабильного по частоте и амплитуде сигнала с выхода схемы синхронизации 14. Если сигнал с выхода усилителя 4 будет больше треугольного напряжения с выхода схемы синхронизации 14, то на выходе релейного элемента с зоной неоднозначности 9 будет высокий логический уровень, если меньше, то на выходе релейного элемента с зоной неоднозначности 9 низкий логический уровень. Уровень сигнала зависит от фазы отклонения чувствительного элемента 1. Сигналы с релейного элемента с зоной неоднозначности 9, в виде уровня, поступают на вход преобразователя уровня 10, а затем на входы пары ждущих синхронных генераторов 11 и 12, которые с помощью схемы синхронизации 14, выдают сигналы в виде импульса на каждое воздействие входящего сигнала (с выхода релейного элемента с зоной неоднозначности 9) равного "1". Реверсивный двоичный счетчик 13 производит подсчет единичных импульсов поступающих с выхода ждущего синхронного генератора 11 и вычитание импульсов поступающих с выхода ждущего синхронного генератора 12. Реверсивный двоичный счетчик 13 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде. Информация с реверсивного двоичного счетчика 13, равная разности числа "положительных" и "отрицательных" импульсов, является дискретным выходом компенсационного акселерометра. Сигнал с релейного элемента с зоной неоднозначности 9 поступает на вход магнитоэлектрического силового преобразователя 15, который компенсирует угловое отклонение чувствительного элемента 1 в соответствии с фазой W/g.
Введение в компенсационный акселерометр релейного элемента с зоной неоднозначности 9, в отрицательную обратную связь, и интегратора 5 в прямую связь усилителя 4, позволило реализовать режим автоколебаний, увеличить коэффициент усиления по разомкнутому контуру, без потери устойчивости. Кроме того, введение интегратора 5 с в прямую цепь усилителя 4 позволило реализовать в устройстве астатизм второго порядка, расширить полосу пропускания и повысить точность измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 2018 |
|
RU2688880C1 |
| Компенсационный акселерометр | 2018 |
|
RU2688878C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2754203C1 |
| Компенсационный акселерометр | 2022 |
|
RU2792706C1 |
| Компенсационный акселерометр | 2020 |
|
RU2738877C1 |
| Акселерометр | 2019 |
|
RU2696667C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2780407C1 |
| Компенсационный акселерометр | 2020 |
|
RU2724241C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793895C1 |
| Компенсационный акселерометр | 2019 |
|
RU2720327C1 |
Изобретение, компенсационный акселерометр, предназначено для применения в качестве элемента в системах стабилизации и навигации. Изобретение может найти применение в приборах измерения механических величин компенсационного типа. Сущность заявленного решения заключается в том, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, выход которого соединен с одним из входов схемы исключающее "или" через усилитель и первый логический элемент, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь, генератор опорного напряжения, выходы которого соединены как с датчиком положения, так и с одним из входов схемы исключающее "или" через второй логический элемент, преобразователь уровня, соединенный с входом реверсивного двоичного счетчика через пару ждущих синхронных генераторов, схему синхронизации, интегратор, введены релейный элемент с зоной неоднозначности с выхода схемы исключающее "или" на вход преобразователя уровня и интегратор с одного из входов усилителя на его выход, кроме того, один из выходов релейного элемента с зоной неоднозначности соединен с входом магнитоэлектрического силового преобразователя, дополнительные входы релейного элемента с зоной неоднозначности и ждущих синхронных генераторов соединены с выходом схемы синхронизации, а отрицательная обратная связь реализована с выхода усилителя на вход датчика момента через последовательно соединенные по информационным входам первый логический элемент, схему исключающее "или", релейный элемент с зоной неоднозначности, и выход реверсивного двоичного счетчика является цифровым выходом устройства. Введение в компенсационный акселерометр релейного элемента с зоной неоднозначности в отрицательную обратную связь и интегратора в прямую связь усилителя позволило реализовать режим автоколебаний, увеличить коэффициент усиления по разомкнутому контуру без потери устойчивости. Кроме того, введение интегратора с выхода датчика положения на выход усилителя позволило реализовать астатизм второго порядка, расширить полосу пропускания и повысить точность измерения. 2 ил.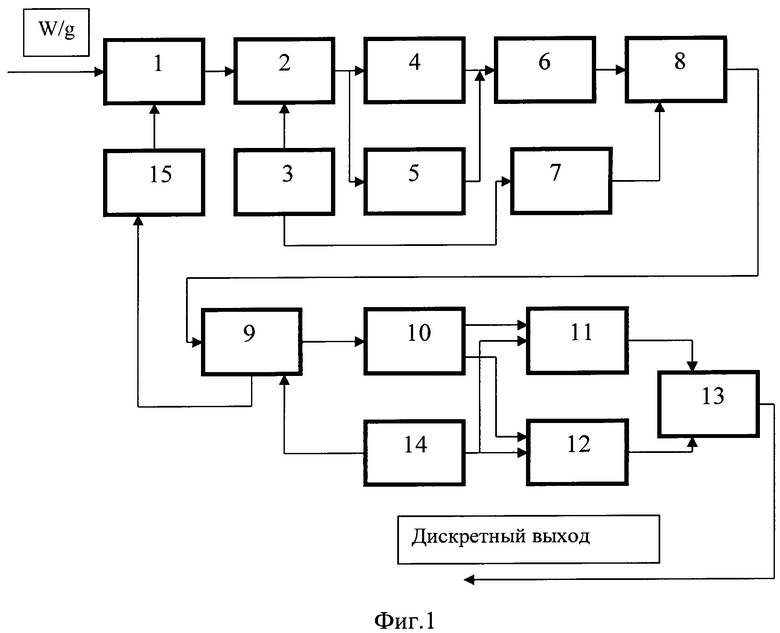
Компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, выход которого соединен с одним из входов схемы исключающее "или" через усилитель и первый логический элемент, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь, генератор опорного напряжения, выходы которого соединены как с датчиком положения, так и с одним из входов схемы исключающее "или" через второй логический элемент, преобразователь уровня, соединенный с входом реверсивного двоичного счетчика через пару ждущих синхронных генераторов, схему синхронизации, интегратор, отличающийся тем, что в него введены релейный элемент с зоной неоднозначности с выхода схемы исключающее "или" на вход преобразователя уровня и интегратор с одного из входов усилителя на его выход, кроме того, один из выходов релейного элемента с зоной неоднозначности соединен с входом магнитоэлектрического силового преобразователя, дополнительные входы релейного элемента с зоной неоднозначности и ждущих синхронных генераторов соединены с выходом схемы синхронизации, а отрицательная обратная связь реализована с выхода усилителя на вход датчика момента через последовательно соединенные по информационным входам первый логический элемент, схему исключающее "или", релейный элемент с зоной неоднозначности, и выход реверсивного двоичного счетчика является цифровым выходом устройства.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2541720C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149411C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| WO 1998057196 A1, 17.12.1998 | |||
| US 5396439 A, 07.03.1995 | |||
| CN 203011945 U, 19.06.2013. | |||

