Изобретение относится к измерительной технике и может быть использовано в качестве элемента в системах стабилизации и навигации. Оно может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (патент РФ №2210781, опубл. 20.08.2003 г.), содержащий чувствительный элемент акселерометра, датчик положения, усилитель, магнитоэлектрический силовой преобразователь, компенсационную катушку, которая подключена к выходу усилителя, причем к компенсационной катушке подключена цепь из последовательно соединенных первого и второго резисторов, а первый резистор зашунтирован конденсатором. К точке соединения компенсационной катушки с цепью из последовательно соединенных первого и второго резисторов, подключено интегро-дифференцирующее звено с передаточной функцией  (Т1, Т2 - соответственно постоянные времени Т2>Т1).
(Т1, Т2 - соответственно постоянные времени Т2>Т1).
Недостатком такого компенсационного акселерометра является динамическая погрешность, обусловленная включением параллельно одному из резисторов конденсатора, что равносильно введению в акселерометр апериодического звена.
Наиболее близким по технической сущности является устройство для измерения ускорений (патент РФ №2400761 С1, опубл. 27.09.2010 г., бюл. №27), содержащее чувствительный элемент, датчик положения, выход которого соединен с входом усилителя переменного тока, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь с выхода датчика положения, отличающееся тем, что в образованную отрицательную обратную связь с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя введены последовательно соединенные по информационным входам усилитель переменного тока, который выполнен со стабильным коэффициентом усиления, первый логический элемент, схему исключающее "или", прецизионный релейный элемент, сглаживающий фильтр, широкополосный фильтр второго порядка  (где Т1, ζ1, ζ2 - постоянная времени фильтра, относительные коэффициенты демпфирования, s - оператор преобразования Лапласа, причем ζ2>ζ1) и первый преобразователь напряжение-ток, в устройство также введен интегратор, вход которого соединен с одним из выходов схемы исключающее "или", и второй преобразователь напряжение-ток, вход которого соединен с выходом интегратора, а выход - с входом магнитоэлектрического силового преобразователя, в устройстве генератор опорного напряжения соединен как с датчиком положения, так и со схемой исключающее "или" через второй логический элемент, и выход со сглаживающего фильтра является аналоговым выходом устройства для измерения ускорений.
(где Т1, ζ1, ζ2 - постоянная времени фильтра, относительные коэффициенты демпфирования, s - оператор преобразования Лапласа, причем ζ2>ζ1) и первый преобразователь напряжение-ток, в устройство также введен интегратор, вход которого соединен с одним из выходов схемы исключающее "или", и второй преобразователь напряжение-ток, вход которого соединен с выходом интегратора, а выход - с входом магнитоэлектрического силового преобразователя, в устройстве генератор опорного напряжения соединен как с датчиком положения, так и со схемой исключающее "или" через второй логический элемент, и выход со сглаживающего фильтра является аналоговым выходом устройства для измерения ускорений.
Недостатком устройства для измерения ускорений является малая полоса пропускания и невысокая точность, которая ограничена коэффициентом усиления по разомкнутому контуру.
Технической задачей настоящего изобретения является расширение полосы пропускания устройства для измерения ускорений и повышение точности измерения.
Это достигается тем, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, выход которого соединен с входом усилителя со стабильным коэффициентом усиления, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь, введены аналоговая, интегрирующая и дискретная интегрирующая отрицательные обратные связи, аналоговая отрицательная обратная связь реализована с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам усилитель переменного тока, который выполнен со стабильным коэффициентом усиления, первый логический элемент, схему исключающее "или", фильтр  (где К1 и Т1 - коэффициент передачи и постоянная времени, s - оператор преобразования Лапласа), первый преобразователь напряжение-ток и сумматор, интегрирующая отрицательная обратная связь реализована с выхода схемы исключающее "или" на вход магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам первый интегратор
(где К1 и Т1 - коэффициент передачи и постоянная времени, s - оператор преобразования Лапласа), первый преобразователь напряжение-ток и сумматор, интегрирующая отрицательная обратная связь реализована с выхода схемы исключающее "или" на вход магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам первый интегратор  , (где К2 - коэффициент передачи), второй преобразователь напряжение-ток и сумматор, а дискретная интегрирующая отрицательная обратная связь введена с выхода схемы исключающее "или" на вход магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам второй интегратор с передаточной функцией
, (где К2 - коэффициент передачи), второй преобразователь напряжение-ток и сумматор, а дискретная интегрирующая отрицательная обратная связь введена с выхода схемы исключающее "или" на вход магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам второй интегратор с передаточной функцией  (где К3 - коэффициент передачи), триггер и сумматор, кроме того, генератор опорного напряжения соединен как с датчиком положения, так и с фазовым сдвигателем, выход которого соединен с одним из входов схемы исключающее "или" через второй логический элемент, а один из выходов триггера соединен с входом реверсивного двоичного счетчика, выход которого является дискретным выходом компенсационного акселерометра.
(где К3 - коэффициент передачи), триггер и сумматор, кроме того, генератор опорного напряжения соединен как с датчиком положения, так и с фазовым сдвигателем, выход которого соединен с одним из входов схемы исключающее "или" через второй логический элемент, а один из выходов триггера соединен с входом реверсивного двоичного счетчика, выход которого является дискретным выходом компенсационного акселерометра.
Введение в компенсационный акселерометр аналоговой, интегрирующей и дискретной интегрирующей отрицательных обратных связей, одна из которых содержит фильтр с передаточной функцией (где К1 и Т1 - коэффициент передачи и постоянная времени, s - оператор преобразования Лапласа), а другая - первый интегратор с передаточной функцией  (где К2 коэффициент передачи), позволяет обеспечить устойчивость. Дискретная интегрирующая отрицательная обратная связь, содержащая второй интегратор с передаточной функцией (где К3 - коэффициент передачи) и триггер, позволяет реализовать значительный коэффициент передачи по разомкнутому контуру, быстродействие, полосу пропускания и повысить точность измерения. Введение в дискретную отрицательную обратную связь второго интегратора позволяет увеличить скорость нарастания переходного процесса в компенсационном акселерометре, а следовательно, увеличить быстродействие устройства. Введение в структуру компенсационного акселерометра отрицательных обратных связей приводит к астатизму по отклонению и по скорости.
(где К2 коэффициент передачи), позволяет обеспечить устойчивость. Дискретная интегрирующая отрицательная обратная связь, содержащая второй интегратор с передаточной функцией (где К3 - коэффициент передачи) и триггер, позволяет реализовать значительный коэффициент передачи по разомкнутому контуру, быстродействие, полосу пропускания и повысить точность измерения. Введение в дискретную отрицательную обратную связь второго интегратора позволяет увеличить скорость нарастания переходного процесса в компенсационном акселерометре, а следовательно, увеличить быстродействие устройства. Введение в структуру компенсационного акселерометра отрицательных обратных связей приводит к астатизму по отклонению и по скорости.
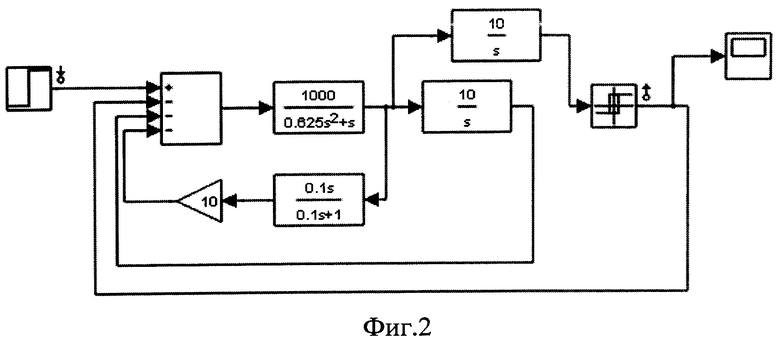
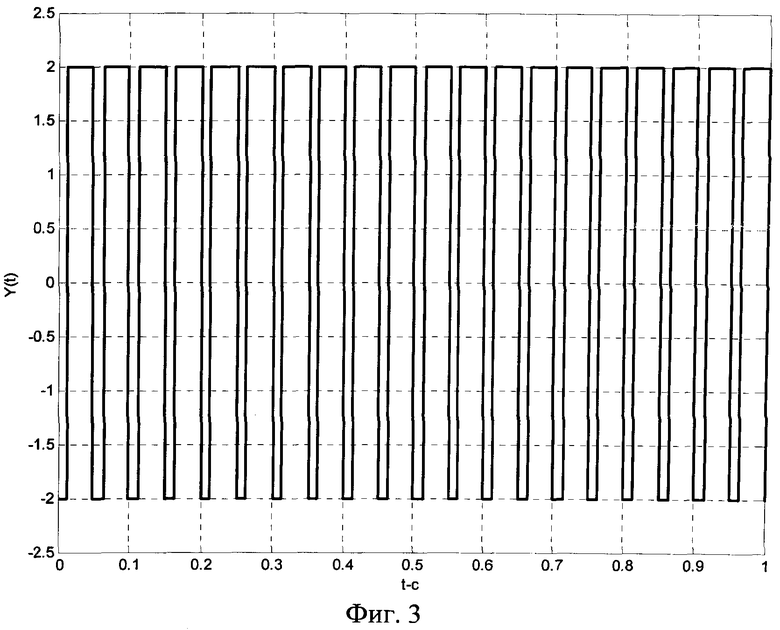
На фиг.1 изображена функциональная схема компенсационного акселерометра измерения ускорений; на фиг.2 - схема моделирования компенсационного акселерометра; на фиг 3. представлен переходный процесс в дискретной интегрирующей отрицательной обратной связи компенсационного акселерометра.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое положение которого фиксирует датчик положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения 3. Выходная обмотка датчика положения 2 соединена с усилителем со стабильным коэффициентом усиления 4, выход которого соединен с входом первого логического элемента 5. Выход генератора опорного напряжения 3 соединен с входом фазового сдвигателя 6. Выход фазового сдвигателя 6 соединен с входом второго логического элемента 7. Выходы первого логического элемента 5 и второго логического элемента 7 соединены с входами схемы исключающее "или" 8. Один из выходов схемы исключающее "или" 8 соединен с входом фильтра 9, выход которого соединен с входом первого преобразователя напряжение-ток 10, и выход первого преобразователя напряжение-ток 10 соединен с входом сумматора 11. Один из выходов схемы исключающее "или" 8 соединен также с одним из входов сумматора 11 через первый интегратор 12 и второй преобразователь напряжение-ток 13. Другой из выходов схемы исключающее "или" 8 соединен с одним из входов сумматора 11 через второй интегратор 14 и триггер 15. Выход сумматора 11 соединен с входом магнитоэлектрического силового преобразователя 16. Выход триггера 15 соединен с входом реверсивного двоичного счетчика 17.
Внутреннее содержание генератора опорного напряжения, фазового сдвигателя, логических элементов, схемы исключающее "или", усилителя, фильтра, триггера, реверсивного двоичного счетчика, интегратора и преобразователя напряжение-ток приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т. 1-3, 1993.
Работа компенсационного акселерометра осуществляется следующим образом. Отклонение чувствительного элемента 1 под действием ускорения фиксируется датчиком положения 2, обмотка возбуждения которого соединена с генератором опорного напряжения 3. Выходной сигнал с датчика положения 2 имеет фазу 0° либо 180° относительно несущей частоты. Выходной сигнал с датчика положения 2 усиливается усилителем переменного тока 4 со стабильным коэффициентом усиления. С выхода первого логического элемента 5 входной сигнал с усилителя 4 представляется в виде сигнала прямоугольной формы с частотой генератора опорного напряжения 3. Для выделения фазы отклонения чувствительного элемента 1 предусмотрен фазовый сдвигатель 6, введенный с выхода генератора опорного напряжения 3 на вход второго логического элемента 7. Выход второго логического элемента 7 соединен со схемой исключающее "или" 8. На выходе второго логического элемента 7 будет сигнал, аналогичный по форме сигналу с первого логического элемента 5. Выходные сигналы с 5 и 7, сдвинутые по фазе, поступают на входы схемы исключающее "или" 8 (схема сложения по модулю "2"), осуществляющей операцию логического сложения. Если сигналы с логических элементов 5 и 7 имеют нулевой фазовый сдвиг, то на выходе схемы 8 имеем логический "0", если же сигналы с 5 и 7 имеют фазовый сдвиг, отличный от нуля, то на выходе 8 будет логическая "1". Форма выходного сигнала с 8 аналогична форме сигналов с логических элементов 5 и 7. Выходной сигнал с выхода схемы исключающее "или" - 8 поступает на вход фильтра 9 с передаточной функцией  , (где K1 и Т1 - коэффициент передачи и постоянная времени, s - оператор преобразования Лапласа), включенного в одну из аналоговых отрицательных обратных связей. Фильтр 9 обеспечивает заданную форму переходного процесса в компенсационном акселерометре. Сигнал с фильтра 9 через первый преобразователь напряжение-ток 10 поступает на один из входов сумматора 11, а затем на вход магнитоэлектрического силового преобразователя 16. Для обеспечения астатизма по отклонению чувствительного элемента 1 в компенсационный акселерометр введена интегрирующая отрицательная обратная связь с выхода схемы исключающее "или" 8 на вход магнитоэлектрического силового преобразователя 16 через первый интегратор 12, второй преобразователь напряжение-ток 13 и сумматор 11. Для повышения быстродействия и реализации значительного коэффициента передачи по разомкнутому контуру в компенсационный акселерометр введена дискретная интегрирующая отрицательная обратная связь с выхода схемы исключающее "или" - 8 на вход магнитоэлектрического силового преобразователя 16 через второй интегратор 14, триггер 15 и сумматор 11. Магнитоэлектрический силовой преобразователь 16 развивает момент, который компенсирует угловое отклонение чувствительного элемента 1, вызванное действием ускорения. Выход с триггера 15 соединен с входом реверсивного двоичного счетчика 17, на выходе которого имеем цифровой код, пропорциональный ускорению.
, (где K1 и Т1 - коэффициент передачи и постоянная времени, s - оператор преобразования Лапласа), включенного в одну из аналоговых отрицательных обратных связей. Фильтр 9 обеспечивает заданную форму переходного процесса в компенсационном акселерометре. Сигнал с фильтра 9 через первый преобразователь напряжение-ток 10 поступает на один из входов сумматора 11, а затем на вход магнитоэлектрического силового преобразователя 16. Для обеспечения астатизма по отклонению чувствительного элемента 1 в компенсационный акселерометр введена интегрирующая отрицательная обратная связь с выхода схемы исключающее "или" 8 на вход магнитоэлектрического силового преобразователя 16 через первый интегратор 12, второй преобразователь напряжение-ток 13 и сумматор 11. Для повышения быстродействия и реализации значительного коэффициента передачи по разомкнутому контуру в компенсационный акселерометр введена дискретная интегрирующая отрицательная обратная связь с выхода схемы исключающее "или" - 8 на вход магнитоэлектрического силового преобразователя 16 через второй интегратор 14, триггер 15 и сумматор 11. Магнитоэлектрический силовой преобразователь 16 развивает момент, который компенсирует угловое отклонение чувствительного элемента 1, вызванное действием ускорения. Выход с триггера 15 соединен с входом реверсивного двоичного счетчика 17, на выходе которого имеем цифровой код, пропорциональный ускорению.
Введение в компенсационный акселерометр отрицательных обратных связей, содержащих фильтр, первый и второй интеграторы, а также триггера позволило создать компенсационный акселерометр параметрического типа, в котором можно реализовать значительный коэффициент усиления по разомкнутому контуру, расширить полосу пропускания и обеспечить астатизм по отклонению и по скорости чувствительного элемента.
Техническое решение предлагаемого компенсационного акселерометра было промоделировано с параметрами, указанными на фиг.2. Результаты моделирования приведены на фиг.3 при входном воздействии 1(t). Из анализа переходного процесса следует, что в компенсационном акселерометре за счет введения отрицательных обратных связей, содержащих фильтр, первый и второй интеграторы, а также триггер, можно реализовать значительный коэффициент передачи по разомкнутому контуру, повысить точность измерения, быстродействие, расширить полосу пропускания и обеспечить устойчивость.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2541716C1 |
| Компенсационный акселерометр | 2016 |
|
RU2631019C1 |
| Компенсационный акселерометр | 2018 |
|
RU2676217C1 |
| Компенсационный акселерометр | 2022 |
|
RU2792706C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2754203C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2400761C1 |
| Компенсационный акселерометр | 2018 |
|
RU2688878C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2780407C1 |
| Компенсационный акселерометр | 2019 |
|
RU2700339C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2758196C1 |
Компенсационный акселерометр предназначен для применения в системах стабилизации и навигации. Устройство содержит чувствительный элемент, датчик положения, выход которого соединен с входом усилителя со стабильным коэффициентом усиления, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь. При этом в него дополнительно введены аналоговая, интегрирующая и дискретная интегрирующая отрицательные обратные связи. Аналоговая отрицательная обратная связь реализована с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам усилитель переменного тока, первый логический элемент, схему исключающее ИЛИ, фильтр, первый преобразователь напряжение-ток и сумматор. Интегрирующая отрицательная обратная связь реализована с выхода схемы исключающее ИЛИ, на вход магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам первый интегратор, второй преобразователь напряжение-ток и сумматор. Дискретная интегрирующая отрицательная обратная связь введена с выхода схемы исключающее ИЛИ на вход магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам второй интегратор, триггер и сумматор. Кроме того, генератор опорного напряжения соединен как с датчиком положения, так и с фазовым сдвигателем, выход которого соединен с одним из входов схемы исключающее ИЛИ через второй логический элемент, а один из выходов триггера соединен с входом реверсивного двоичного счетчика, выход которого является дискретным выходом компенсационного акселерометра. Технический результат заключается в расширении полосы пропускания и увеличении точности измерения ускорений. 3 ил.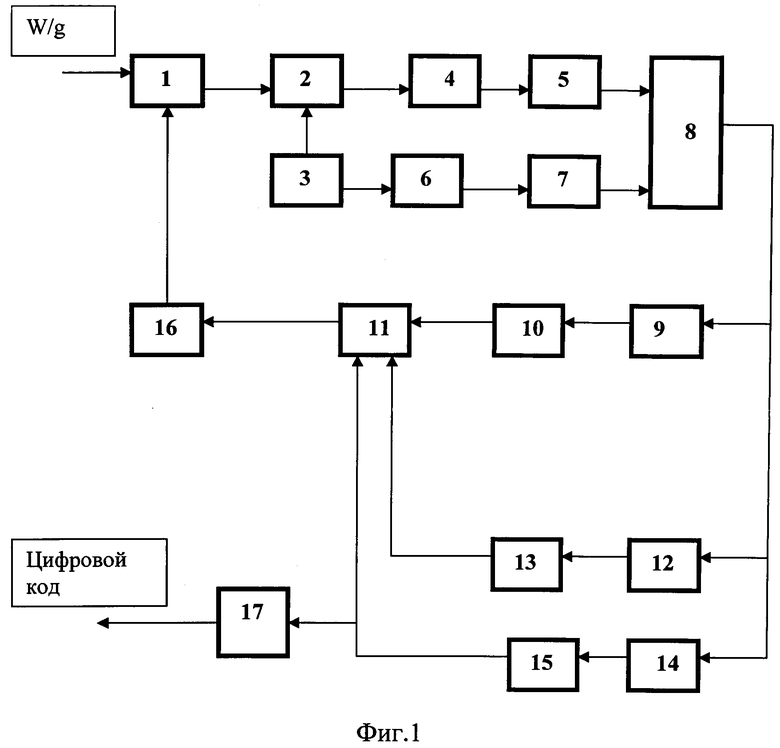
Компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, выход которого соединен с входом усилителя со стабильным коэффициентом усиления, магнитоэлектрический силовой преобразователь, включенный в отрицательную обратную связь, отличающийся тем, что в него введены аналоговая, интегрирующая и дискретная интегрирующая отрицательные обратные связи, аналоговая отрицательная обратная связь реализована с выхода датчика положения на один из входов магнитоэлектрического силового преобразователя через последовательно соединенные по информационным входам усилитель переменного тока, который выполнен со стабильным коэффициентом усиления, первый логический элемент, схему исключающее ИЛИ, фильтр 


| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2359277C1 |
| US 3028550 A, 03.04.1962 | |||
| US 3429189 A, 25.02.1969 | |||
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2415442C1 |

