Изобретение относится к устройству для определения положения первого и второго механических элементов относительно друг друга и содержит первый измерительный модуль, устанавливаемый на первом механическом элементе, а второй измерительный модуль, устанавливаемый на втором механическом элементе, а также блок обработки результатов, причем как минимум один из двух измерительных модулей оснащен световым источником для формирования светового луча, точка падения которого определяется как минимум на одной поверхности на другом измерительном модуле.
Такого рода устройство может предназначаться, например, для определения центрирования двух валов относительно друг друга, для определения прямолинейности или соосного расположения отверстий при сверлении, для определения прямолинейности контуров или уровня расположения различных точек одной поверхности.
Как правило, для определения центрирования валов относительно друг друга вычисляется точка падения светового луча в нескольких положениях угла поворота, для этого измерительные модули смещаются вдоль периферийных поверхностей или совершается вращение валов с расположенными на периферийных поверхностях измерительными модулями.
В заявках DE 33 35 336 A1 описано устройство для измерения центрирования валов, в котором как первый, так и второй измерительные модули посылают световые лучи и содержат оптический детектор, причем каждый световой луч направлен на детектор другого измерительного модуля.
Работающее по такому принципу устройство для измерения центрирования валов описано также в патенте US 6,873,931 В1, причем каждый измерительный модуль оснащен двуосным датчиком ускорения для автоматического учета угла поворота вала.
Из заявки DE 38 14 466 А1 известно устройство для измерения центрирования валов, в котором первый измерительный модуль посылает световой луч, падающий на два расположенных друг за другом в осевом направлении двуосных оптических детектора второго измерительного модуля.
Из заявки WO 03/067187 А1 известно устройство для измерения центрирования валов, в котором первый измерительный модуль посылает расходящийся луч, падающий на два расположенных друг за другом в осевом направлении двуосных оптических детектора второго измерительного модуля.
Из заявки WO 00/28275 А1 известно устройство для измерения центрирования валов, в котором оба измерительных модуля располагаются на лицевой стороне соответствующих валов, причем первый измерительный модуль посылает расходящийся световой луч, падающий сбоку на три маркировочных штифта, расположенных на уровне второго измерительного модуля.
В заявке EP 2 093 537 A1 описано устройство для измерения центрирования валов, у которого первый измерительный модуль посылает расходящийся световой луч, падающий на два оптических полосных детектора, установленных сбоку и расположенных параллельно на определенном расстоянии друг от друга, причем продольное направление детекторов вертикально по отношению к плоскости расхождения светового луча.
В заявке EP 0543 971 В1 описано устройство для определения центрирования отверстий при турбинном бурении или исходной оси, причем световой луч, изображающий исходную ось, направлен на двуосный оптический детектор, содержащий опору, которая расположена на стенке отверстия и перемещается вдоль нее по окружности, что позволяет определять точку падения лазера для нескольких углов поворота.
В заявке US 2007/0201040 А1 описано устройство для определения уровня нескольких измерительных точек одной плоскости, причем лазерный луч, вращающийся в горизонтальной плоскости с постоянной угловой скоростью, направлен на двуосный оптический детектор, что позволяет на основании вертикальной составляющей точки падения определить высоту измерительной точки, а на основании момента и периода горизонтального покрытия детектора определить угол и расстояние измерительной точки относительно лазерного источника.
Похожее устройство описано в заявке EP 1 473 540 А1, причем лазерный луч направлен на детектор посредством вращающейся пентагональной призмы, а угол вращения обнаруживает зависимый профиль линии, на основании которого можно определить угол измерительной точки.
Во всех отмеченных здесь измерительных устройствах производится вычисление и оценка соответствующей точки падения светового луча на поверхность детектора.
Из заявки DE 40 41 723 A1 известно устройство для определения положения измерительной точки относительно исходной точки для осуществления управления или контроля сверления отверстия, обнаруживающего несколько измерительных позиций, расположенных в отверстии или на головке бура и имеющих соответственно по одной камере с маркировкой, причем каждая камера снимает маркировку камеры, расположенной рядом с ней, или измерительную позицию.
Из заявки WO 2010/042039 А1 известно устройство для измерения центрирования валов, в котором каждый из двух измерительных модулей оснащен установленной на корпусе камерой, причем на обращенной к другому модулю стороне корпуса расположен оптический образец, снимаемый находящейся напротив камерой. На стороне корпуса, содержащей образец, имеется при этом отверстие, через которое отображается образец, расположенный напротив. При альтернативном исполнении один из двух модулей оснащен лишь камерой, но не содержит образца, в то время как другой модуль не имеет камеры, однако содержит объемный образец.
В заявке ЕР 1 211 480 А2 описано устройство для измерения центрирования валов, в котором первый измерительный модуль оснащен источником света, направляющим световой луч на второй измерительный модуль, содержащий матовую пластинку; отдаленная от первого измерительного модуля сторона матовой пластинки проецируется с помощью соответствующей оптики на детектор изображения, также являющийся частью второго измерительного модуля.
В заявках DE 101 43 812A1 и DE 101 17 390 A1 описано устройство для измерения центрирования валов, у которого первый измерительный модуль содержит световой источник для формирования расходящегося светового луча, а расположенный напротив второй измерительный модуль содержит оптическую систему частичного отражения с обратной матовой пластинкой и камеру, которая посредством первичного светового пятна от луча, исходящего непосредственно от светового источника и посредством вторичного светового пятна от луча, отраженного от отражающей оптической системы частичного отражения и от рефлектора, расположенного на лицевой стороне первого измерительного модуля, снимает отдаленную от первого измерительного модуля сторону матовой пластинки.
Фирма Венте КамСорик ГмбХ, расположенная по адресу: 38108, Брауншвейг, предлагает лазерный приемник излучения для механических измерений под маркой LaserTrac.
Задачей данного изобретения является создание устройства для определения положения двух механических элементов относительно друг друга, например устройства для измерения центрирования валов, которое будет наиболее простым в исполнении, приемлемым по цене и может быть приспособлено к интересам заказчика. В дальнейшем планируется разработка соответствующего способа.
В соответствии с данным изобретением эта задача решена благодаря устройству согласно пункту формулы изобретения 8 и способу согласно пунктам формулы изобретения 23 и 26.
Преимущество данного решения согласно изобретению состоит в том, что вместо оптического детектора, на который падает отраженный световой пучок, используется камера и поверхность управления, проецируемая на камеру, благодаря чему появилась возможность создания наиболее простой системы, приспосабливаемый к потребностям потребителя. Так, например, в качестве камеры может использоваться разработанный для конечного потребителя массовый продукт, такой как фотокамера или смартфон, который можно приобрести за приемлемую цену и который по разным причинам, может быть, уже имеется в наличии у пользователя.
В соответствии с формой исполнения изобретения камера может свободно перемещаться относительно обоих измерительных модулей, так что ей можно пользоваться вручную, чтобы обеспечить отображение поверхности управления на камеру. В соответствии с альтернативной формой исполнения камера может быть выполнена как часть измерительного модуля, оснащенного средствами для формирования светового пучка, или располагаться на этом измерительном модуле.
Изобретение может в частности применяться для определения центрирования двух валов относительно друг друга, для определения прямолинейности или соосного расположения отверстий при сверлении, для определения прямолинейности контуров или уровня расположения различных точек одной поверхности.
Преимущества разработки очевидны из зависимых пунктов формулы изобретения.
Далее примеры изобретения поясняются с помощью прилагаемых чертежей:
Фиг. 1 вид сбоку, в несколько аксонометрической проекции первого примера устройства для определения положения элементов в соответствии с изобретением;
Фиг. 2 фронтальный вид поверхности управления устройства, изображенного на фиг. 1;
Фиг. 3 измерительный модуль устройства, оснащенный поверхностью управления в момент практического использования, вид в аксонометрической проекции;
Фиг. 4 схематичное изображение возможного процесса корректировки аксонометрического искажения проекции поверхности управления на камеру с помощью закона излучения;
Фиг. 5 изображенный в продольном разрезе статор турбины; измеряемый посредством устройства согласно изобретению;
Фиг. 6 измерительный модуль, устанавливаемый на внутреннюю стенку устройства, изображенного на фиг. 5;
Фиг. 7 пример использования измерительного устройства в соответствии с изобретением при измерении уровня;
Фиг. 8 примеры изображений, снятых с помощью устройства, изображенного на фиг. 7; и
Фиг. 9 пример поверхности управления, оснащенной QR-кодом.
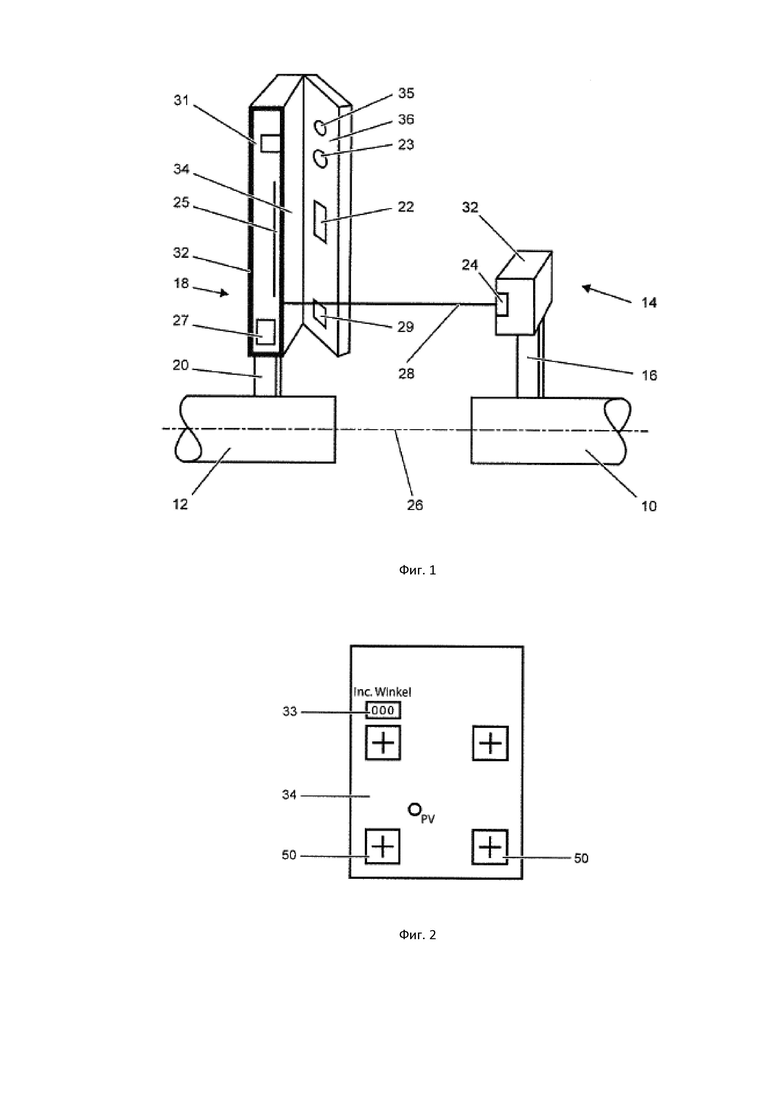
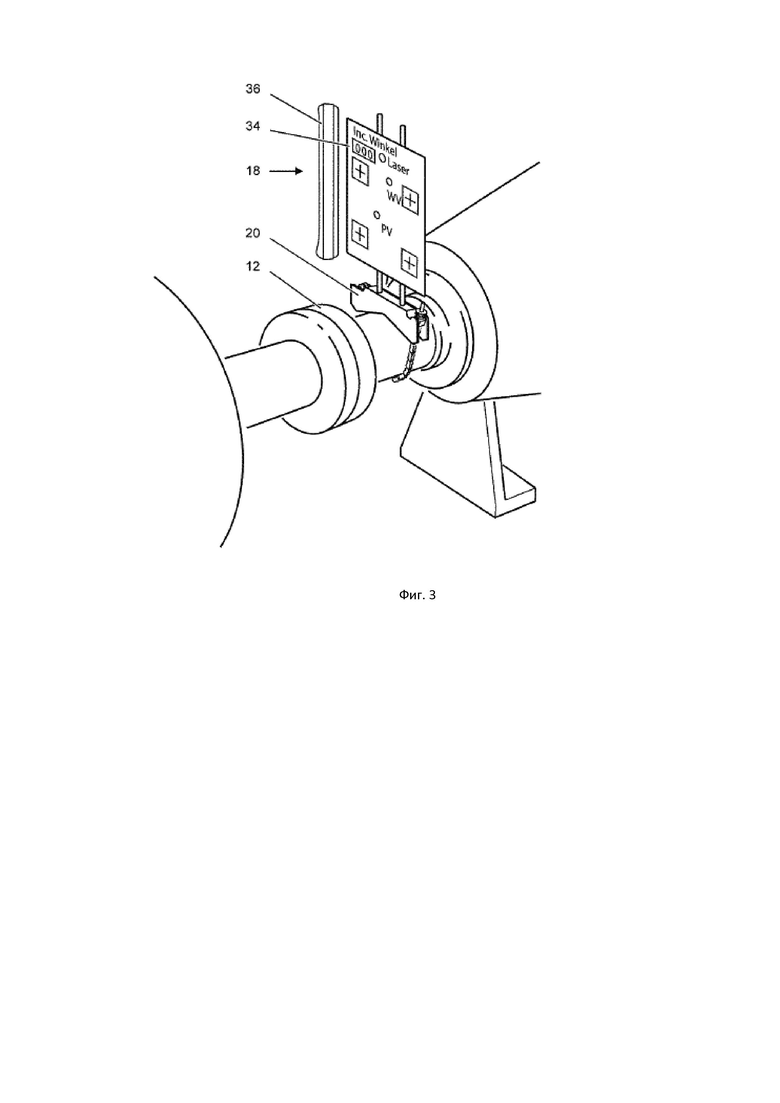
На фиг. 1-3 изображен первый пример устройства в соответствии с изобретением для определения центрирования первого вала 10 (не показанной) машины и второго вала 12 (не показанной) машины, относительно друг друга. Устройство включает первый измерительный модуль 14, содержащий элемент 16, закрепляемый на периферийной поверхности первого вала 10, и второй измерительный модуль 18, содержащий элемент 20, закрепляемый на периферийной поверхности второго вала 12.
Оба вала 10 и 12 располагаются друг за другом, по возможности соосно базисной оси 26, причем устройство, содержащее измерительные модули 14 и 18, служит для определения углового и/или параллельного смещения относительно базисной оси 26 или относительно друг друга. Устройство, как правило, оснащено средствами для отображения результатов углового или параллельного смещения (на рисунках не изображено).
Первый измерительный модуль 16 содержит световой источник для формирования светового луча или светового пучка 28 и коллиматор для формирования коллимированного светового пучка 28.
Второй измерительный модуль 18 содержит поверхность управления 34 и камеру 36 для записывания изображений поверхности управления.
Камера 36 содержит оптику 35 для отображения поверхности управления 34 на датчик камеры (не представлено). Камера 36 может быть, например, расположена сбоку под наклоном к поверхности управления 34, чтобы не препятствовать падению светового луча, посылаемого с измерительного модуля 18, по крайней мере, в центральной части поверхности управления 34.
Поверхность управления 34 обращена к первому измерительному модулю 14, если оба измерительных модуля 14 и 18 находятся в одном измерительном положении.
В примере на фиг. 1 и 2 точка падения (то есть световое пятно) светового пучка 28 на поверхность управления 34 обозначена как PV.
Первый измерительный модуль 14 содержит корпус 32, который оснащен источником света 24 и соответствующей электроникой. Одно из преимуществ состоит в том, что источник света 24 является попеременно включаемым, что позволяет удерживать подверженность колебаниям на низком уровне. К тому же корпус 32 оснащен источником тока (батарея или аккумулятор) для источника света 24 и содержит систему управления режимом электропитания. В целом корпус 32 не должен по толщине существенно превышать кронштейны, предусмотренные для крепления на дополнительном элементе 16 (не показано на фиг. 1).
За поверхностью управления 34 (если смотреть от первого измерительного модуля 14) на втором измерительном модуле 18 расположен корпус 27, который может включать инклинометр 31, позволяющий определить угол наклона второго измерительного модуля 18 и, соответственно, положение угла поворота вала 10, оснащенного вторым измерительным модулем 18. Такой инклинометр 31 может, например, быть выполнен в форме MEMS-инклинометра.
Одно из преимуществ заключается в возможности направить световой пучок 28 без промежуточного включения отражающего элемента непосредственно на поверхность управления 34 второго измерительного модуля 18, то есть между световым источником 24 и поверхностью управления не устанавливаются никакие отражающие элементы.
Согласно фиг. 2 поверхность управления 34 содержит оптические марки 50, которые, например, могут быть выполнены в форме крестиков, что облегчает оценку записанных камерой 36 изображений поверхности управления 34 для того, чтобы оптические марки 50 были видны и в темноте, может быть использован дополнительный источник света, например диод 23 на камере 36, в качестве альтернативы может быть предусмотрена задняя подсветка 25 поверхности управления 34. При этом на матовую поверхность (из стекла или пластика) можно наклеить металлическую пленку с вырезами, причем в этом случае через корпус 32 будет дополнительно поступать рассеянный белый свет.
Одно из преимуществ заключается в достаточно ровном исполнении поверхности управления 34. Согласно фиг. 1 и 3 камера 36 может быть смещена вбок или располагаться в опрокинутом положении относительно поверхности управления 34. При этом камера 36 может монтироваться внизу на дополнительном элементе 16 (который может, например, представлять собой устройство натяжения цепи). При этом камера 36 направлена так, чтобы обеспечить по возможности полное отображение поверхности управления 34 на датчике камеры и не допустить при этом затенения светового пучка 28. При этом дополнительно может быть предусмотрено экранирующее устройство для рассеянного света (изображение отсутствует), которое можно также использовать для механической стабилизации камеры 36 и поверхности управления 34.
Камера 36 может быть выполнена, например, в виде компактной камеры, смартфона или камеры мобильного телефона. Одно из преимуществ состоит в том, что оптика 35 представляет собой объектив с постоянным или переменным фокусным расстоянием. Преимуществом также является, что разрешение датчика камеры составляет минимум 8 мегапикселей. Камера работает преимущественно в макродиапазоне.
Если камера выполнена в виде смартфона, то дисплей смартфона может использоваться в качестве графического интерфейса пользователя; в иных случаях для навигации может использоваться дополнительный прибор подобного рода, такой как смартфон или планшет. При этом может также применяться голосовое управление с использованием наушников или ожидаемые в 2013 году очки Google Glass.
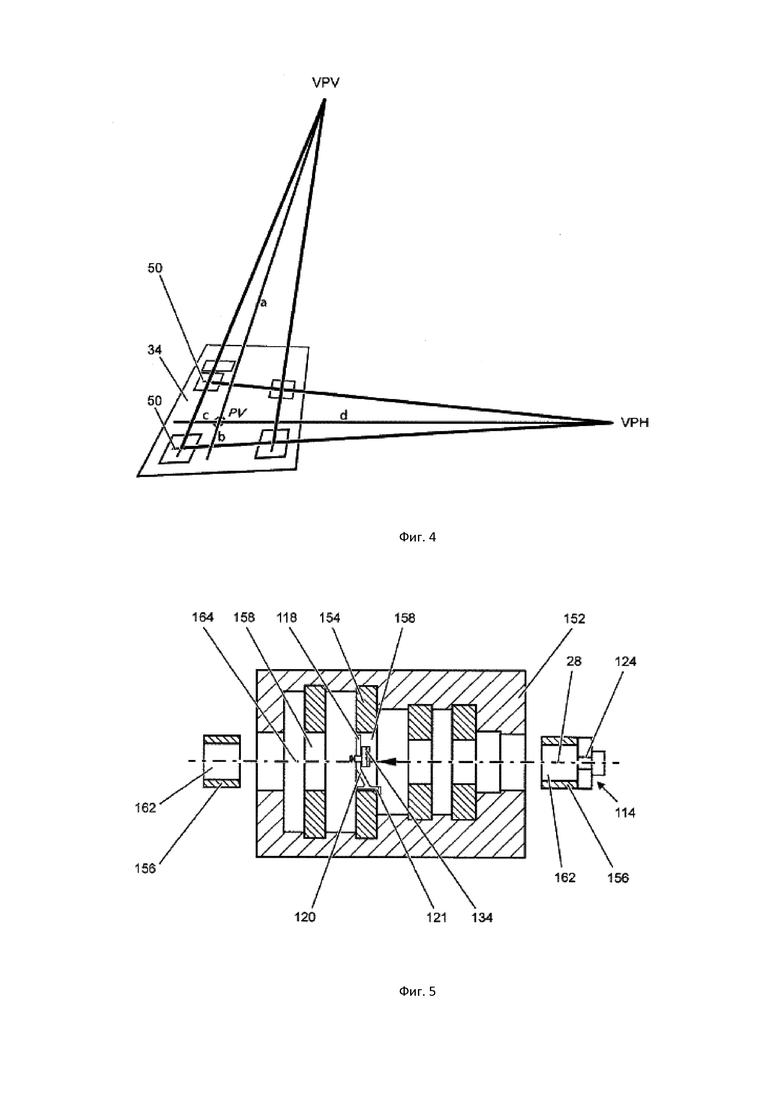
Оценка полученных с помощью камеры изображений может осуществляться следующим образом: целью оценки является определение координат центра точки падения PV светового пучка 28. При этом сначала производится коррекция записанного изображения, то есть исправление перспективного искажения, вызванного боковым запрокинутым положением камеры 36 и искажений оптической системы. Это может, например, осуществляться с помощью оптических марок 50, внешние координаты которых точно известны. Точка падения светового пучка 28 может быть выделена на основание цвета заднего фона, что приводит к сокращению области для определения центральной точки. Затем производится определение центральной точки посредством нахождения центра инерции. Поскольку внешние координаты оптических марок точно известны, можно произвести перерасчет в координаты пикселя, благодаря чему можно определить центр точек падения светового пучка WV и PV во внешних координатах.
Еще одной возможностью является применение закона излучения для вычисления координат точек падения, как это схематически изображено на фиг. 4 применительно к точке падения PV. При этом пользуются горизонтальной и вертикальной точками схода в перспективе, обозначенными VPH и VPV, соответственно.
Можно вычислить средний диаметр точки падения светового пучка PV и использовать его для оценки расстояния между световым источником 24 и поверхностью управления 34, то есть между первым измерительным модулем 14 и вторым измерительным модулем 18.
Если второй измерительный модуль 18, оснащенный дисплеем 33, обнаруживает угол наклона, измеряемый инклинометром 31, то камера 36 обладает преимущественно функцией оптического считывания OCR, позволяющей определять величину этого угла. В качестве альтернативы возможна передача величины угла непосредственно на камеру 36, что может осуществляться, например, посредством канала Bluetooth.
Если камера 36 представляет собой смартфон, то, как правило, встроенный в него инклинометр 29 может использоваться для определения угла наклона. Оценка изображений может осуществляться в блоке обработки результатов, схематично представленном в пункте 22, который может являться частью камеры, особенно, если речь идет о смартфоне, уже по определению обладающем высокой вычислительной мощностью.
Перед началом измерения производится юстировка измерительных модулей 14 и 18 относительно друг друга, что обеспечивает падение светового пучка 28 приблизительно на середину поверхности управления 34. Для этой цели первый измерительный модуль 14 может быть оснащен устройством регулировки по высоте (не представлено) для регулировки положения первого измерительного модуля 14 в поперечном направлении относительно вала 10, а также устройством регулировки угла, используемым для опрокидывания первого измерительного модуля 14 относительно поперечного направления вала 10 и для перемещения первого измерительного модуля 14 в поперечном направлении. После произведенной юстировки обоих измерительных модулей 14 и 18 относительно друг друга на основании позиции падения светового пучка 28 можно сделать вывод о рассогласовании обоих валов 10 и 12 относительно друг друга, если оба вала 10 и 12 с расположенными на них измерительными модулями 14 и 18 вращаются вокруг оси 26, причем перемещение соответствующей точки падения прослеживается и оценивается в зависимости от угла поворота (который в свою очередь определяется с помощью функции инклинометра) в принципе известным способом. Это позволяет сделать выводы о вертикальном смещении, горизонтальном смещении и угловом смещении валов 10 и 12 (такой метод описан например в заявках EP 1 211 480 А2 и WO 98/33039).
Обычно во время измерения центрирования и во время юстировки валов камера должна с достаточно высокой интенсивностью осуществлять запись и оценку изображений поверхности управления 34, причем в секунду может создаваться и обрабатываться около пяти изображений. Если в качестве камеры выступает смартфон, то создание и оценка изображений может осуществляться в форме соответствующих приложений.
В качестве альтернативы непрерывной записи изображений может быть избран такой режим записи, при котором процесс создания изображений протекает в зависимости от актуального угла наклонения, например, всегда при изменении значения угла на определенную величину, к примеру, на 1°.
Устройство для центрирования может в качестве опции содержать наушники Bluetooth, которые оператор может носить при юстировке валов и которые используются для беспроводного приема актуальных значений смещения, обнаруживаемых блоком обработки результатов 22 камеры 36, представленной смартфоном, таким образом, обеспечивается акустическая передача соответствующих данных оператору, занятому юстировкой валов. Это является преимуществом, поскольку во время юстировки оператору трудно читать показания на дисплее смартфона 36. При этом наушники могут также использоваться для осуществления голосового управления по каналу Bluetooth смартфона 36.
В качестве альтернативы оператор может использовать второй смартфон или планшет для обеспечения более удобного способа прочтения информации с дисплея, выступающего в роли камеры смартфона 36, с помощью канала Bluetooth (например, посредством удаленного администрирования с речевым вводом команд VNC), причем посредством сенсорной навигации смартфоном 36 можно также управлять со второго смартфона или планшета, см. также заявку WO 97/36146.
Как правило, отображаемая поверхность имеет размеры 40 мм Х 40 мм; в этом случае один пиксель соответствует примерно 20 µm, если разрешение камеры составляет 8 мегапикселей (что соответствует вертикальному разрешению около 2500 пикселей). При использовании компактной камеры, например в 16 мегапикселей, может быть достигнуто разрешение примерно в 7 µm.
В принципе можно также использовать камеру со специальной оптикой, в случае со смартфоном может применяться предвключенная лупа. Подлежащие отображению данные измерений управляющей поверхности 34 могут быть сокращены до размеров 20×20 или 30×30 мм.
При этом вполне возможна беспроводная передача изображений камеры (например, с помощью WI-FI) например, на некую мобильную платформу. Для этого можно использовать специальную SD-карту.
В соответствии с изменением формы исполнения, изображенной на фиг. 1–3 камера 36 может быть выполнена в виде «свободной камеры», подвижной относительно обоих измерительных модулей 14 и 18, оператор для осуществления записи изображений управляющей поверхности 34 может держать ее в руках или поставить на штатив. При этом камера либо работает в макро-диапазоне, либо располагается на соответствующем расстоянии от управляющей поверхности 34 для проведения записи, или, там где это невозможно, а также в случае иных пожеланий камера может использоваться с телеобъективом, что позволяет записывать изображения с расстояния более одного метра.
В принципе камеру можно также использовать в тех случаях, когда она для записи изображений монтирована на первом измерительном модуле 14 и связана с ним таким образом, что после проведения измерения центрирования или юстировки возможен ее демонтаж и использование для других целей. Преимуществом это является особенно в тех случаях, когда в роли камеры выступает смартфон.
В принципе использование смартфона в качестве камеры имеет ряд преимуществ. Такого рода приборы очень легко адаптировать к новым условиям эксплуатации, и они обладают высокой продуктивностью, что касается программирования и создания графического интерфейса пользователя; в частности имеются функции распознавания жестов, включения клавиатуры и локализации.
В дальнейшем оператор, занятый измерением центрирования, может использовать прибор, правила эксплуатации которого ему и без того ему уже знакомы. К тому же смартфоны имеют большое количество портов, например в области банка данных по техническому обслуживанию; в частности важную роль играют беспроводные порты, которые могут использоваться для подключения других мобильных операционных платформ, наушников (с эхо и шумоподавлением), очков Google Glass, вибропояса и т.д. В остальном смартфон может использоваться в своей обычной функции, если в данный момент с его помощью не производится измерение центрирования.
Измерительные модули 10 и 12 могут использоваться не только для центрирования валов, но и для иных способов определения положения объектов.
На фиг. 5 и 6 показан пример того, как первый измерительный модуль 114 и второй измерительный модуль 118 для измерения выравнивания частей статора турбины 152, а именно колец направляющего аппарата относительно подшипников ротора турбины 156, юстируются таким образом, чтобы центральные оси изгиба цилиндрических стенок 158 средних отверстий 160 колец направляющего аппарата 154 и центральные оси изгиба цилиндрической опорной поверхности подшипника 162 подшипников ротора турбины 156 располагались друг за другом в одну линию. Для этого первый измерительный модуль 114 расположен на показанном на фиг. 5 справа подшипнике ротора 156 таким образом, что сформированный световым источником 124 световой пучок 128 посылается приблизительно параллельно окончательной оси вращения ротора 164, которую еще предстоит точно установить, и проходит через измерительное пространство, образуемое стенками отверстий 158 колец направляющего аппарата 154.
Второй измерительный модуль 118 посредством распорной детали 120 связан с опорой 121, которая расположена на внутренней стенке 138 среднего отверстия 160 одного из колец направляющего аппарата 154 таким образом, что световой луч 128 падает на управляющую поверхность 134 второго измерительного модуля 118. Второй измерительный модуль может быть выполнен подобно тому, как второй измерительный модуль 118 на фиг. 1–3 с расположенной сбоку камерой, что позволит записывать изображения управляющей поверхности 134 с целью определения положения точки падения PV светового луча 128. Предусмотрена устойчивая и подвижная опора 121, опирающаяся на стенку 158, причем второй измерительный модуль 118 может перемещаться по окружности, что позволяет записывать изображения управляющей поверхности 134 при различных углах поворота второго измерительного модуля 118. Для этих целей опора 121 выполнена таким образом, что ее можно устанавливать в той или иной измерительной позиции относительно стенки 158, например, за счет ее исполнения в виде магнитного крепления. В основном второй измерительный модуль 118 оснащен инклинометром 131 для определения угла поворота. Путем определения точки падения светового пучка 128 для как минимум трех различных углов поворота можно определить выравнивание внутренней стенки 158 относительно светового луча 128 и относительно исходной оси подшипников ротора 156; такой метод описан, например, в заявке EP 0 543 971 В1.
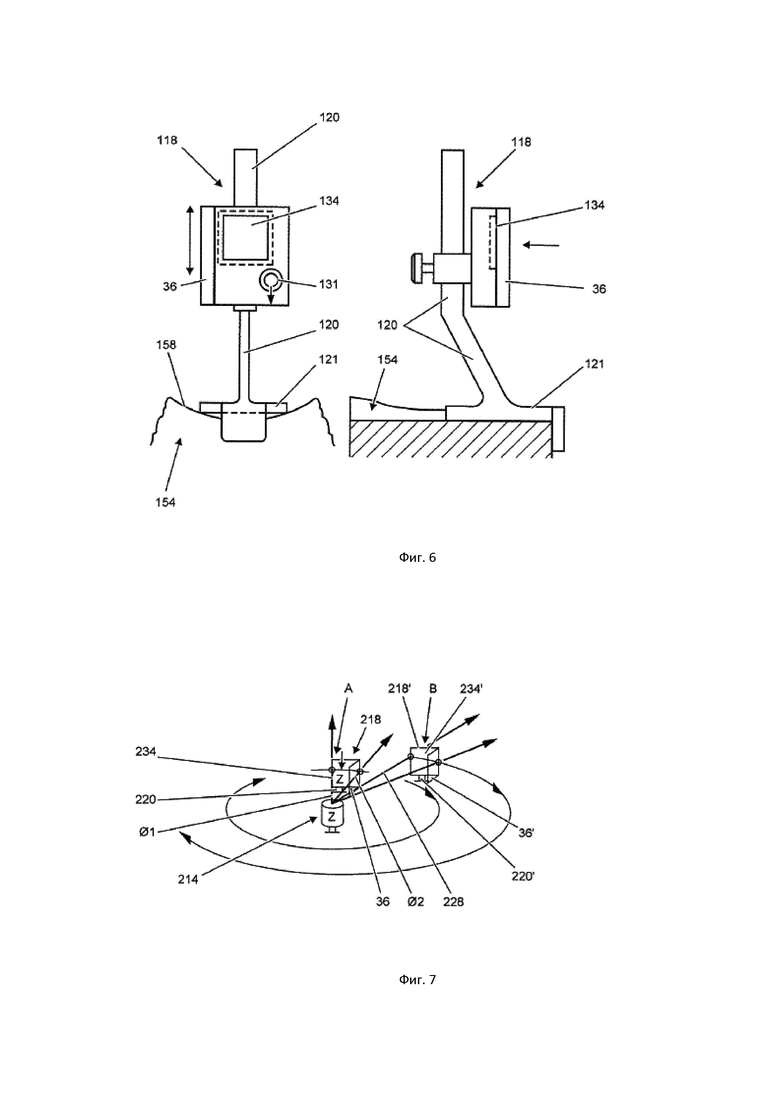
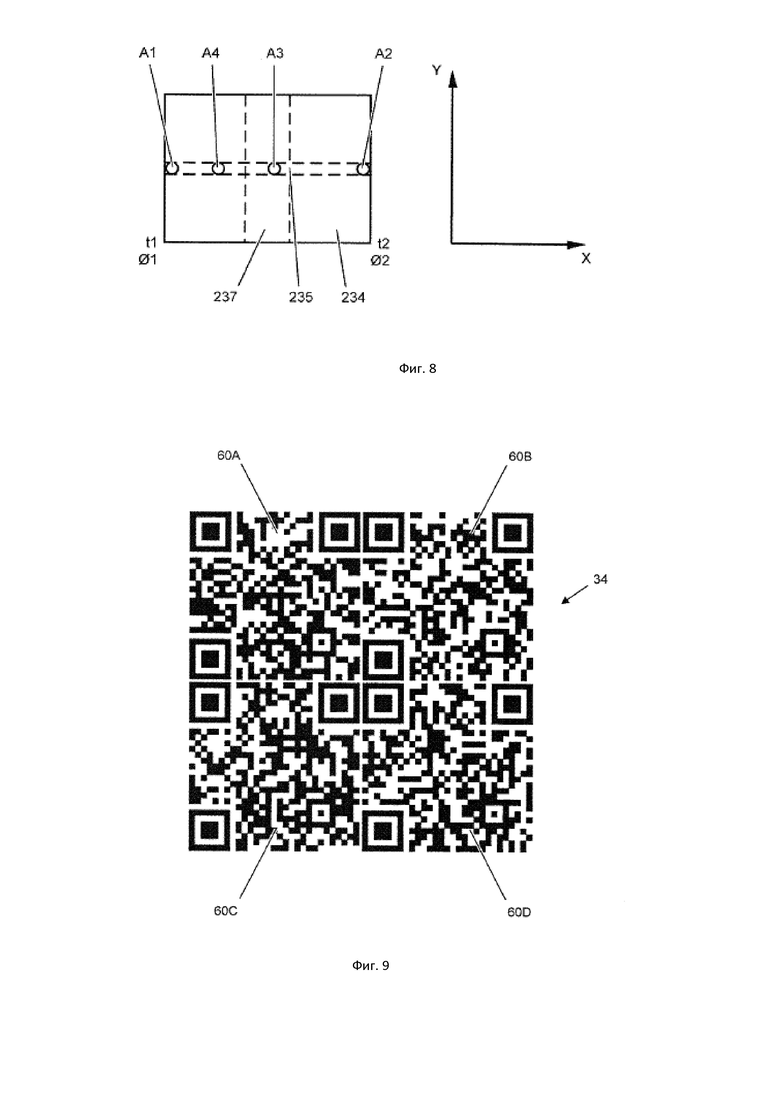
На фиг. 7 показано альтернативное применение устройства для определения положения объекта, у которого первый измерительный модуль 214 и второй измерительный модуль 218 используются для измерения уровня измерительных точек на поверхности, подлежащей измерению. Первый измерительный модуль 214 выполнен таким образом, что может формировать вращающийся вокруг вертикальной оси в горизонтальной плоскости световой луч 228, который, как правило, движется по своей траектории с постоянной угловой скоростью и периодически перекрывает управляющую поверхность второго измерительного модуля 218, главным образом в горизонтальном направлении. Здесь второй измерительный модуль 218 также может быть оснащен расположенной сбоку камерой 36, подобно тому, как и измерительный модуль 18 на фиг. 1–3 или измерительный модуль 118 на фиг. 5.
Для такого измерения уровня записывается как минимум одно изображение управляющей поверхности 234, которое оценивается с учетом точки падения светового луча 228, что позволяет определить разницу уровня по отношению к предыдущим измерительным позициям, при которых второй измерительный модуль 218 или опора 220 измерительного модуля 218 позиционировались в другом месте измеряемой поверхности (на фиг. 7 первая измерительная позиция обозначена буквой А, а вторая измерительная позиция обозначена буквой В).
На фиг. 8 схематично показано, как точка падения светового луча 228 перекрывает управляющую поверхность 234 в горизонтальном направлении. При этом в момент времени t1, соответствующий углу поворота ϕ1 происходит падение светового луча 228 в точке А 1 на левом краю управляющей поверхности 234, затем эта точка перемещается полосой 235 в горизонтальном направлении по управляющей поверхности 234, а в момент времени t2, соответствующий углу поворота ϕ2, покидает управляющую поверхность 234 в точке А2. Если скорость вращения w светового луча 228 сохраняется постоянной, то получается хорошая корреляция между временем и углом поворота.
Если управляющая поверхность 234 записывается с помощью камеры 236, могут получиться различные варианты изображений, которые зависят от момента записи и продолжительности освещения. Если период освещения достаточно продолжителен относительно скорости вращения w, то на изображении будет главным образом видна горизонтальная черта, длина которой, если она не перекрывает всего диапазона изображения, зависит от времени освещения и скорости вращения w. При более коротких периодах освещения получается скорее точка, круг или горизонтальный эллипс.
Далее последует описание возможных режимов записи.
Согласно первому варианту камера 36 может работать в (так называемом) видеорежиме, причем камера через регулярные отрезки времени, то есть с определенной кадровой частотой записывает изображения с причем оценке подвергаются лишь те изображения, у которых точка падения светового луча 228 лежит в заданном диапазоне управляющей поверхности 234 (этот диапазон обозначен на фиг. 8 цифрой 237). В примере на фиг. 8 данное условие выполнено для точки падения А3, однако не выполнено для точки падения А4. При этом заданный диапазон лежит, как правило, в середине оси Х поверхности управления 234. У изображений, где точка падения находится в диапазоне 237, оценке подвергается координата Y точки падения, что позволяет получить значение вертикального уровня измерительной позиции. Такая оценка координаты Y точки падения может проводиться и в тех случаях, когда точка падения на изображении смазана в горизонтальном направлении, причем здесь можно дополнительно получить значение нивелировочного угла управляющей поверхности 234, которая соответствует отклонению «штриха» относительно горизонтали.
При альтернативном режиме записи камера не находится в видеорежиме, а обладает функцией триггера, позволяющей камере 36 записывать изображения управляющей поверхности 234 лишь в тех случаях, когда точка падения светового луча 228 лежит в заданном диапазоне, например, в диапазоне 237, управляющей поверхности 234. Таким образом, можно избежать сложностей, связанных с целенаправленным выбором определенного изображения после осуществления записи, как то имеет место при описанном первым режиме записи.
Кроме того камера 36 может соединяться с первым измерительным модулем 214 посредством беспроводного канала передачи данных (например канала Bluetooth), что обеспечивает передачу данных о частоте вращения и угле поворота светового луча 228 от первого измерительного модуля 214 на камеру 36, причем камера посредством этого беспроводного канала передачи данных при может необходимости управлять частотой вращения светового луча 228. Подобный канал передачи данных, в соответствии с первым примером, позволяет камере записывать изображения с определенной кадровой частотой (то есть в так называемом видеорежиме), а частоту вращения с помощью канала передачи данных от камеры можно настроить так, чтобы два из записанных изображения (как правило, два записанных друг за другом изображения) показывали наиболее смещенные относительно друг друга в горизонтальном направлении точки падения светового луча 228 на управляющую поверхность 234 (это условие выполнено например для изображений с точками падения А1 и А2, представленных на фиг. 8). При этом определяется горизонтальное расстояние между двумя точками падения, а на основании кадровой частоты, частоты вращения и горизонтального расстояния обеих точек падения можно вычислить (поперечное) расстояние между вторым измерительным модулем 218 и первым измерительным модулем 214. При этом, если точка падения смазана, может быть вычислена линия наилучшего соответствия, а с посредством расчета центровки можно определить горизонтальное расстояние между точками падения.
Если расстояние между вторым измерительным модулем 218 и первым измерительным модулем 214 существенно превышает расстояние между двумя точками падения, то горизонтальное расстояние между точками падения приблизительно соответствует длине дуги; угол поворота ϕ может быть точно определен на основании заданной частоты вращения w светового луча 228 и обратной кадровой частоты камеры 36, что позволит также вычислить радиус, то есть расстояние между световым источником 224 и управляющей поверхности 234. Поскольку угол поворота ϕ передается с первого измерительного модуля 214 на камеру 36, относительное угловое положение поверхности управления 234 является известным, что позволяет определить как угловое положение измерительной позиции, так и ее удаленность от первого измерительного модуля 214 вместе с уровнем измерительной позиции.
В еще одном альтернативном исполнении возможна запись изображения со смазанной точкой падения, достигаемая посредством целенаправленного выбора времени освещения и частоты вращения, причем вычисляется горизонтальная длина смазанности, а на основании времени освещения изображения и частоты вращения светового луча 228 вычисляется расстояние между вторым измерительным модулем 218 и первым измерительным модулем 214.
При еще одном видоизменении устройства, показанном на фиг. 1-3, устройство, показанное на фиг. 1-3, выполнено для определения прямолинейности тела. При этом измерительные модули 18 и 22 вместо элементов 20, служащих для закрепления на соответствующей периферийной поверхности валов 10 и 14, содержат элементы для плоскостного крепления с геометрическим замыканием на измеряемой поверхности тела.
Отклонения от прямизны измеряемой поверхности тела ведут при этом к смещению или к проворачиванию измерительных модулей 18 и 22 относительно друг друга, что ведет к соответствующему смещению точки падения светового луча 28 на поверхности управления 34, на основании чего можно определить отклонения от прямизны измеряемой поверхности. Измерительные модули могут перемещаться по измеряемой поверхности, что позволяет измерить всю ее площадь.
В соответствии с формой исполнения изобретения управляющая поверхность может быть оснащена несколькими, как правило, распределенными по поверхности управления в зависимости от поля изображения, двухмерными оптическими кодами, например кодами QR, нанесенными на поверхность управления и служащими для кодировки информации/данных о поверхности управления или об измерительных модулях, оснащенными поверхностью управления. Речь здесь может идти, например, о серийном номере измерительного модуля, габаритах поверхности управления по направлениям X и Y (например, в мм), коэффициентах коррекции, имеющих отношении к точности или к погрешностям печатающего устройства, используемого для нанесения на управляющую поверхность (например, удлинение или сжатие по направлениям X и Y), к количеству кодов на поверхности управления, к положению соответствующего кода в поле изображения (номер строки, номер колонки), а также к расстоянию между тем или иным кодом и началом координат поверхности управления (например, в µm).
Отдельные коды могут располагаться, гранича друг с другом, что позволяет покрыть всю поверхность управления, как показано, например, на фиг. 9, где изображены 4 кода: 60А, 60В, 60С, 60D. Количество и разрешение кодов должно быть оптимизировано в соответствии с разрешением печатающего устройства и камеры. Вместо кода QR можно использовать другие проприетарные графические коды.
Наличие графических кодов на поверхности управления имеет следующие преимущества:
Не обязательно фотографировать всю поверхность отражателя вместе с защитным контуром, что облегчает работу пользователя. Существует возможность реконструкции кодов в целях создания требуемого изображения, что обеспечивает достаточное количество точек для линеаризации изображения поверхности управления (внутренние и внешние параметры). Благодаря определенным маркам коды на поверхности управления могут быть идентифицированы как таковые. Возможна более высокая точность при определении позиции падения. Может быть произведена коррекция поверхности управления с учетом точности используемого для нанесения печатающего устройства.
Изобретение относится к области для определения положения механических элементов относительно друг друга. Устройство для определения положения первого механического элемента и второго механического элемента относительно друг друга содержит первый измерительный модуль, устанавливаемый на первом механическом элементе, и второй измерительный модуль, устанавливаемый на втором механическом элементе, а также блок обработки результатов. Причем первый измерительный модуль оснащен средствами для формирования светового пучка, причем второй измерительный модуль содержит поверхность управления для рассеивания падающего на поверхность управления света, камеру, а также средства для отображения поверхности управления на камеру, направленную на сторону поверхности управления, обращенную к первому измерительному модулю. Кроме того, поверхность управления обращена к первому измерительному модулю, если оба измерительных модуля расположены на соответствующих механических элементах так, чтобы на них падал световой пучок, причем блок обработки результатов выполнен так, что может на основании передаваемых камерой графических данных определить на поверхности управления точку падения светового пучка, посылаемого с первого измерительного модуля, а на основании этого определить положение первого механического элемента и второго механического элемента относительно друг друга. Технический результат – повышение точности при определении положения двух механических элементов относительно друг друга. 4 н. и 29 з.п. ф-лы, 9 ил.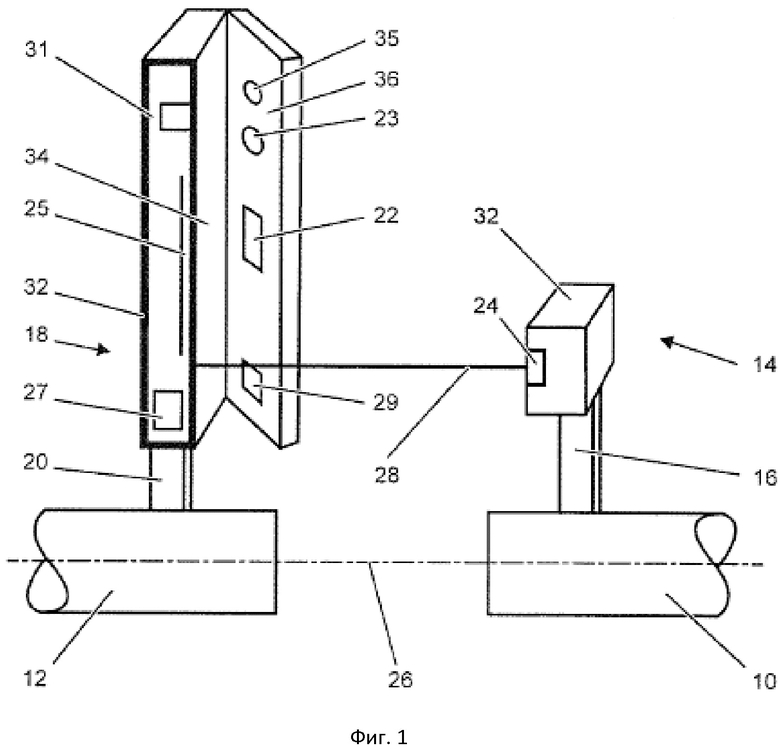
1. Устройство для определения положения первого механического элемента (10, 156) и второго механического элемента (12, 154) относительно друг друга, содержащее первый измерительный модуль (14, 114, 214), устанавливаемый на первом механическом элементе, и второй измерительный модуль (18, 118, 218), устанавливаемый на втором механическом элементе, а также блок обработки результатов (22),
причем первый измерительный модуль оснащен средствами (24, 124, 224) для формирования светового пучка (28, 128, 228),
причем второй измерительный модуль содержит поверхность управления (34, 134, 234) для рассеивания падающего на поверхность управления света, камеру (36), а также средства для отображения поверхности управления на камеру,
причем поверхность управления обращена к первому измерительному модулю, если измерительные модули размещены на соответствующих механических элементах так, чтобы на них падал световой пучок,
причем блок обработки результатов выполнен таким образом, что может на основании передаваемых камерой графических данных определить на поверхности управления точку падения светового пучка, посылаемого первым измерительным модулем, а исходя из этого определить положение первого и второго механических элементов относительно друг друга,
причем камера направлена на сторону поверхности управления, обращенную к первому измерительному модулю.
2. Устройство по п. 1, отличающееся тем, что камера (36) смещена вбок относительно поверхности управления (34, 134, 234).
3. Устройство по п. 2, отличающееся тем, что камера (36) опрокинута вбок относительно поверхности управления (34, 134, 234).
4. Устройство по п. 1, отличающееся тем, что второй измерительный модуль (18, 118, 218) оснащен средствами для съемного закрепления камеры (36).
5. Устройство по п. 1, отличающееся тем, что средства отображения поверхности управления (34, 134, 234) на камеру (36) представлены объективом с фиксированным фокусным расстоянием.
6. Устройство по п. 1, отличающееся тем, что камера (36) оснащена средствами для освещения поверхности управления (34, 134, 234).
7. Устройство по п. 1, отличающееся тем, что камера (36) монтирована на защитной ширме, образующей экранирующее устройство для рассеянного света.
8. Устройство для определения положения первого механического элемента (10, 156) и второго механического элемента (12, 154) относительно друг друга, содержащее первый измерительный модуль (14, 114, 214), устанавливаемый на первом механическом элементе, и второй измерительный модуль (18, 118, 218), устанавливаемый на втором механическом элементе, а также камеру (36) и блок обработки результатов (22),
причем первый измерительный модуль оснащен средствами (24, 124, 224) для формирования светового пучка (28, 128, 228),
причем второй измерительный модуль содержит поверхность управления (34, 134, 234) для рассеивания падающего на поверхность управления света,
причем поверхность управления обращена к первому измерительному модулю, если измерительные модули размещены на соответствующих механических элементах так, чтобы на них падал световой пучок,
причем камера подвижна относительно обоих измерительных модулей и оснащена средствами для отображения поверхности управления на камеру,
причем блок обработки результатов выполнен таким образом, что может на основании передаваемых камерой графических данных определить на поверхности управления точку падения светового пучка, посылаемого первым измерительным модулем, а исходя из этого определить положение первого и второго механических элементов относительно друг друга,
и причем камера выполнена так, что может быть направлена на сторону поверхности управления, обращенную к первому измерительному модулю.
9. Устройство по п. 1, отличающееся тем, что поверхность управления (34, 134, 234) оснащена оптическими марками (50).
10. Устройство по п. 1, отличающееся тем, что блок обработки результатов (22) выполнен так, что может производить коррекцию передаваемых камерой графических изображений с учетом ее опрокинутого положения по отношению к поверхности управления (34, 134, 234).
11. Устройство по п. 1, отличающееся тем, что поверхность управления (34, 134, 234) является в основном ровной.
12. Устройство по п. 1, отличающееся тем, что второй измерительный модуль (18, 118, 218) имеет заднюю подсветку (25) для поверхности управления (34, 134, 234).
13. Устройство по п. 1, отличающееся тем, что в качестве камеры (36) выступает смартфон.
14. Устройство по п. 1, отличающееся тем, что в качестве первого механического элемента выступает первый вал (10), а в качестве второго механического элемента выступает второй вал (12), причем измерительный модуль (14) располагается на периферийной поверхности первого вала, а второй измерительный модуль (18) располагается на периферийной поверхности второго вала.
15. Устройство по п. 14, отличающееся тем, что блок обработки результатов выполнен таким образом, что может на основании графических данных, записанных при различных положениях угла поворота валов (10 и 12), определить угловое смещение, а также вертикальное и горизонтальное смещение валов.
16. Устройство по п. 14 или 15, отличающееся тем, что камера (36) содержит инклинометр (29).
17. Устройство по любому из пп. 1-13, отличающееся тем, что средства (214) для формирования светового пучка (228) выполнены так, что могут сформировать вращающийся вокруг вертикальной оси (Z) световой пучок в горизонтальной плоскости.
18. Устройство по п. 17, отличающееся тем, что блок обработки результатов (22) выполнен так, что может на основании графических данных определить различия в уровне по вертикали между первым и вторым механическими элементами.
19. Устройство по любому из пп. 1-13, отличающееся тем, что первый (14, 114, 214) и/или второй (18, 118, 218) измерительный модуль выполнены для перемещения вдоль кромки или поверхности первого или второго механического элемента, и причем блок обработки результатов выполнен так, что позволяет с помощью графических данных, полученных на основании различных положений измерительных модулей вдоль кромки или поверхности, определить прямолинейность кромки или поверхности первого или второго механического элемента.
20. Устройство по пп. 1-13, отличающееся тем, что второй механический элемент содержит вогнутую цилиндрическую поверхность тела (158), причем второй измерительный модуль (218) предназначен для перемещения по окружному направлению поверхности тела с целью получения графических данных в различных положениях угла поворота второго измерительного модуля, и причем блок обработки результатов (22) выполнен так, что позволяет на основании графических данных определить угловое смещение, а также вертикальное и горизонтальное смещение поверхности тела относительно основного направления, заданного световым пучком (228).
21. Устройство по п. 1, отличающееся тем, что поверхность управления (34, 134, 234) выполнена непрозрачной для светового пучка (28, 128, 228).
22. Устройство по п. 1, отличающееся тем, что поверхность управления (34, 134, 234) оснащена несколькими распределенными по поверхности управления графическими кодами (60А, 60В, 60С, 60D), которые служат для кодирования данных, имеющих отношение к поверхности управления и/или к измерительному модулю, оснащенному поверхностью управления.
23. Способ определения положения первого механического элемента (10, 156) и второго механического элемента (12,154) относительно друг друга,
причем первый измерительный модуль (14, 114, 214) расположен на первом механическом элементе, а второй измерительный модуль (18, 118, 218) расположен на втором механическом элементе,
формирует посредством первого измерительного модуля световой пучок (28, 128, 228) и направляется на поверхность управления второго измерительного модуля,
производится позиционирование камеры (36) и запись как минимум одного изображения поверхности управления, и
оценка как минимум одного изображения, что позволяет определить на поверхности управления точку падения (PV) светового пучка, отражаемого системой отражателей, и на основании этого определить положение первого и второго механического элементов относительно друг друга.
24. Способ по п. 23, отличающийся тем, что камера (36) направлена на обращенную к первому измерительному модулю (14, 114, 214) сторону поверхности управления (34, 134, 234).
25. Способ по п. 23, отличающийся тем, что поверхность управления (34, 134, 234) выполнена в виде матовой пластинки и камера (36) направлена на отдаленную от первого измерительного модуля (14, 114, 214) сторону матовой пластинки (34, 134, 234).
26. Способ определения положения первого механического элемента (10, 156) и второго механического элемента (12, 154) относительно друг друга, причем
первый измерительный модуль (14, 114, 214) установлен на первом механическом элементе, а второй измерительный модуль (18, 118, 218) установлен на втором механическом элементе,
с помощью первого измерительного модуля формируется световой пучок (28, 128, 228) и направляется на обращенную к первому измерительному модулю сторону поверхности управления (34, 134, 234) второго измерительного модуля,
посредством камеры (36), расположенной на втором измерительном модуле и направленной на поверхность управления, записывается как минимум одно изображение поверхности управления, и
производится оценка как минимум одного изображения, что позволяет определить на поверхности управления точку падения (PV, A1, А2, A3; А4) светового пучка и на основании этого определить положение первого и второго механического элементов относительно друг друга.
27. Способ по п. 26, отличающийся тем, что вращающийся вокруг вертикальной оси (Z) световой пучок (228) формируется в горизонтальной плоскости, а на основании графических данных определяется разница уровня по вертикали между первым и вторым механическим элементами.
28. Способ по п. 27, отличающийся тем, что камера (36) работает в режиме, позволяющем записывать через равные промежутки времени изображения поверхности управления, причем оценке подвергаются лишь те изображения, у которых точка падения (A3) светового пучка лежит в заданном диапазоне (237) поверхности управления.
29. Способ по п. 27, отличающийся тем, что камера (36) обладает функцией триггера, позволяющей камере записывать изображения управляющей поверхности (234) лишь в тех случаях, когда точка падения (A3) светового луча (228) лежит в заданном диапазоне (237) управляющей поверхности.
30. Способ по любому из пп. 27-29, отличающийся тем, что камера (36) связана с первым измерительным модулем (214) посредством беспроводного канала передачи данных, что обеспечивает передачу с первого измерительного модуля на камеру (36) данных о частоте вращения и угле поворота.
31. Способ по п. 30, отличающийся тем, что камера (36) может управлять частотой вращения светового пучка с помощью беспроводного канала передачи данных.
32. Способ по п. 31, отличающийся тем, что камера (36) записывает изображения с определенной кадровой частотой, а частота вращения канала передачи данных от камеры настроена так, чтобы два из записанных изображения показывали наиболее смещенные относительно друг друга в горизонтальном направлении точки падения (A1, А2) светового пучка на управляющую поверхность, причем определяется горизонтальное расстояние между двумя точками падения, а на основании кадровой частоты, частоты вращения и горизонтального расстояния между обеими точками падения можно вычислить расстояние между вторым измерительным модулем и первым измерительным модулем.
33. Способ по п. 30, отличающийся тем, что на основании изображения с камеры (36), при котором точка падения светового пучка (228) представлена в смазанном виде, определяется горизонтальная протяженность смазанности и на основании этого с помощью времени освещения изображения и частоты вращения светового луча вычисляется расстояние между вторым измерительным модулем (218) и первым измерительным модулем (214).
| US 6411375 B1, 26.06.2002 | |||
| US 20020063859 A1, 30.05.2002 | |||
| US 5684578 A, 04.11.1997 | |||
| WO 2010042039 A1, 15.04.2010. |

