Изобретения относятся к оптическим измерительным устройствам, в частности к способам и средствам оптической профилометрии и/или профилографии, и могут быть использованы в машиностроительной, подшипниковой, приборостроительной, электронной и оптической промышленности, медицине, биологии и т.д.
Известны различные устройства и способы дифференциально-фазовой профилометрии и/или профилографии, предусматривающие сканирование исследуемой поверхности лазерным световым пучком, расщепленным посредством акустооптического дефлектора по оси X и/или оси Y и определение параметров поверхности по разнице фаз отраженных лучей расщепленного светового пучка, раскрытые, в частности, в патентах US 4577967 A (Citizen Watch Co., Ltd.), March 25, 1986, 356/489 (G 01 B 9/02) "Surface shape measurement apparatus", US 5481360 A (Citizen Watch Co Ltd), 02.01.96, 356/360 (МПК G 01 B 11/00) "Optical device for measuring surface shape", заявке GB 2146116 A (Citizen Watch Co Ltd), 11.04.85, G 01 B 11/30 "Surface condition measurement apparatus", авторском свидетельстве SU 1734066 A1 (Киевский государственный университет им. Т. Г. Шевченко), 15.05.92, G 02 B 21/00 "Способ исследования рельефных и фазовых объектов в лазерном сканирующем микроскопе и устройство для его осуществления" и др.
В известных устройствах возможно разделение светового пучка только по одной оси, при этом возможно получение данных об изменении рельефа поверхности (производной рельефа поверхности) только вдоль одного направления, то есть по оси X или оси Y, при этом разделение светового пучка чаще всего производится только в направлении сканирования пучка. В результате интегрирования получается профилограмма, то есть сечение рельефа поверхности, а в режиме растрового сканирования может быть получен набор таких профилограмм. Таким образом, для построения изображения исследуемой поверхности (восстановления рельефа поверхности) необходимо знание констант интегрирования для каждой линии сканирования. Не учитывать константу интегрирования можно только в некоторых случаях, например, когда имеет место неоднородность на плоской поверхности. Для восстановления рельефа поверхности в более общем случае необходимо иметь данные о частных производных вдоль двух осей.
Таким образом, задача, на решение которой направлено каждое изобретение заявленной группы изобретений, состоит в обеспечении возможности получения данных об изменении рельефа поверхности (частные производных рельефа поверхности) по двум осям, а также исключении погрешностей, вносимых оптической частью профилографа - профилометра и обусловленные конструктивными особенностями устройств подобного типа. Технический результат, достигаемый при реализации каждого изобретения заявленной группы изобретений, состоит в повышении точности построения изображения исследуемой поверхности и точности определения параметров профиля исследуемой поверхности, а также обеспечении возможности исследования поверхностей объектов произвольной формы.
Способ дифференциально-фазовой профилометрии и/или профилографии, обеспечивающий достижение указанного выше технического результата во всех случаях, на которые распространяется объем испрашиваемый правовой охраны, может быть охарактеризован следующей совокупностью существенных признаков.
Способ заключается в том, что предварительно сканируют световым пучком эталонную поверхность, а затем по тем же траекториям сканируют исследуемую поверхность. При этом последовательно сканируют каждую точку как исследуемой, так и эталонной поверхности, по меньшей мере, первым и вторым световым пучком, причем указанные световые пучки разделяют на, по меньшей мере, два параксиальных луча, по меньшей мере, один из которых сдвигают относительно других по частоте и в пространстве вдоль первой оси в первом световом пучке и вдоль ортогональной ей второй оси во втором световом пучке. Измеряют разность фаз отраженных лучей для выбранного количества точек сканируемой поверхности. Аппроксимируют данные о разности фаз отраженных лучей, полученные при сканировании эталонной поверхности, двумерной функцией. Корректируют данные о разности фаз отраженных лучей, полученные при сканировании эталонной поверхности, на основе указанных аппроксимированных данных.
Затем осуществляют двумерное интегрирование скорректированных данных, полученных при сканировании эталонной поверхности, вдоль траекторий перемещения световых пучков и аппроксимируют указанные проинтегрированные данные двумерной функцией. Корректируют данные о разности фаз отраженных лучей, полученные при сканировании исследуемой поверхности, на основе упомянутых аппроксимированных данных о разности фаз отраженных лучей в соответствующих точках эталонной поверхности. Затем осуществляют двумерное интегрирование скорректированных данных, полученных при сканировании исследуемой поверхности, вдоль траекторий перемещения световых пучков. Корректируют указанные проинтегрированные данные на основе упомянутых проинтегрированных и аппроксимированных данных о разности фаз отраженных лучей в соответствующих точках эталонной поверхности. После этого строят изображение и/или определяют параметры профиля исследуемой поверхности.
Кроме того, в частном случае реализации изобретения сканирование могут осуществлять путем перемещения светового пучка от одной точки поверхности к другой параллельно оптической оси по траекториям в виде эквидистантных линий, начинающихся и заканчивающихся на границе заданной области исследуемой поверхности.
Кроме того, в частном случае реализации изобретения при сканировании могут осуществлять перемещение светового пучка через исследуемые точки заданной области сканируемой поверхности по эквидистантным траекториям в направлении первой оси, а затем осуществлять перемещение светового пучка через упомянутые точки заданной области сканируемой поверхности по эквидистантным траекториям в направлении второй оси, ортогональной первой.
Кроме того, в частном случае реализации изобретения при сканировании могут осуществляют перемещение светового пучка через исследуемые точки заданной области сканируемой поверхности путем последовательного перемещения светового пучка через каждое множество точек указанной области, образованное точками, лежащими между ее границами на одной из траекторий, ориентированных в направлении первой оси, и на одной из траекторий, ориентированных в направлении ортогональной ей второй оси.
Кроме того, в частном случае реализации изобретения, по меньшей мере, один из лучей светового пучка могут сдвигать в пространстве вдоль оси перемещения лучей.
Кроме того, в частном случае реализации изобретения, по меньшей мере, один из лучей светового пучка могут сдвигать в пространстве вдоль оси, ортогональной оси перемещения лучей.
Кроме того, в частном случае реализации изобретения аппроксимацию могут осуществлять двумерным полиномом.
Устройство для дифференциально-фазовой профилометрии и/или профилографии, обеспечивающее достижение указанного выше технического результата во всех случаях, на которые распространяется объем испрашиваемый правовой охраны, может быть охарактеризовано следующей совокупностью существенных признаков.
Устройство включает в себя источник света, установленные по ходу светового пучка, по меньшей мере, два акустооптических дефлектора, светоделитель и объектив. Каждый из акустооптических дефлекторов выполнен с возможностью отклонения, сканирования, а также разделения, по меньшей мере, части светового пучка на, по меньшей мере, два луча по частоте и в пространстве по одной из координат. Указанные акустооптические дефлекторы расположены с возможностью отклонения, сканирования и разделения, по меньшей мере, части светового пучка, по меньшей мере, по двум ортогональным координатам. Устройство также включает в себя, по меньшей мере, два генератора управляющих сигналов для каждого акустооптического дефлектора с общим генератором опорной частоты для всех генераторов управляющих сигналов каждого акустооптического дефлектора. Выходы генераторов управляющих сигналов, связаны со входом соответствующего акустооптического дефлектора через сумматор. Устройство также включает в себя фотоприемники опорного и измерительного сигналов и фазовый детектор, причем светоделитель выполнен с возможностью направления части светового пучка от источника света на фотоприемник опорного сигнала и части отраженного светового пучка на фотоприемник измерительного сигнала. Вход фазового детектора связан с выходами указанных фотоприемников, а выход с блоком обработки данных.
Блок обработки данных содержит первый модуль аппроксимации, выполненный с возможностью аппроксимации данных о разности фаз отраженных лучей светового пучка в исследуемых точках эталонной поверхности, третий модуль сравнения для корректировки данных о разности фаз отраженных лучей в исследуемых точках эталонной поверхности на основе указанных аппроксимированных данных, первый модуль интегрирования для интегрирования скорректированных данных о разности фаз отраженных лучей в исследуемых точках эталонной поверхности, вдоль траекторий перемещения светового пучка, связанный со вторым модулем аппроксимации для аппроксимирования указанных проинтегрированных данных. Блок обработки данных включает в себя также первый модуль сравнения для корректировки данных о разности фаз отраженных лучей светового пучка в соответствующих точках исследуемой поверхности на основе и данных о разности фаз отраженных лучей светового пучка в соответствующих точках эталонной поверхности, второй модуль интегрирования, выполненный с возможностью интегрирования данных о разности фаз отраженных лучей светового пучка в исследуемых точках исследуемой поверхности вдоль траекторий перемещения светового пучка, второй модуль сравнения для корректировки упомянутых проинтегрированных данных о разности фаз отраженных лучей светового пучка для исследуемой поверхности на основе упомянутых данных, полученных в результате аппроксимации проинтегрированных данных о разности фаз отраженных лучей светового пучка в соответствующих точках эталонной поверхности. Кроме того, блок обработки данных включает в себя модуль отображения информации и модуль управления разверткой, связанный с упомянутыми генераторами управляющих сигналов.
Кроме того, в частном случае реализации изобретения фазовый детектор через аналогово-цифровой преобразователь, модуль подавления шума и узел выбора режима работы может быть связан с входом третьего модуля сравнения, первого модуля запоминания и первого модуля аппроксимации, выход которого может быть связан с входом второго модуля запоминания. Выход второго модуля запоминания может быть связан со вторым входом упомянутого третьего модуля сравнения, выход которого может быть связан с входом первого модуля интегрирования. Выход первого модуля интегрирования может быть связан со входом второго модуля аппроксимации, выход которого может быть связан с входом третьего модуля запоминания. Выходы первого и второго модулей запоминания могут быть связаны со входами первого модуля сравнения, выход которого может быть связан с первым входом второго модуля интегрирования. Второй вход второго модуля интегрирования может быть связан через модуль коррекции с выходом упомянутого первого модуля запоминания.
Второй модуль интегрирования и третий модуль запоминания могут быть связаны со входами второго модуля сравнения, выход которого может быть связан с первым входом модуля калибровки. Второй вход модуля калибровки может быть связан со вторым выходом второго модуля интегрирования. Выход модуля калибровки может быть связан с узлом расчета параметров поверхности, связанным с первым входом модуля отображения информации, со вторым входом которого может быть связан один из выходов узла выбора режима работы, а с третьим входом может быть связан модуль управления разверткой, выполненный с возможностью задания направления разделения светового пучка и формирования последовательности координат позиционирования светового пучка на заданной области исследуемой поверхности. Со входом модуля управления разверткой может быть связан модуль установки границ области исследуемой поверхности, вход которого может быть связан с упомянутым модулем отображения информации.
Кроме того, в частном случае реализации изобретения между источником света и акустооптическими дефлекторами по ходу светового пучка может быть установлена первая оптическая система, выполненная с возможностью расширения светового пучка, а после акустооптических дефлекторов может быть установлена вторая оптическая система, выполненная с возможностью сужения светового пучка.
Кроме того, в частном случае реализации изобретения источник света может представлять собой лазер.
Возможность осуществления изобретений, охарактеризованных приведенными выше совокупностями признаков, а также возможность реализации назначений изобретений может быть подтверждена описанием конструкции и работы устройства для дифференциально-фазовой профилометрии и/или профилографии, выполненного в соответствии с изобретениями, заявленной группы изобретений. Указанное описание поясняется графическими материалами, на которых изображено следующее.
Фиг. 1 - принципиальная схема устройства.
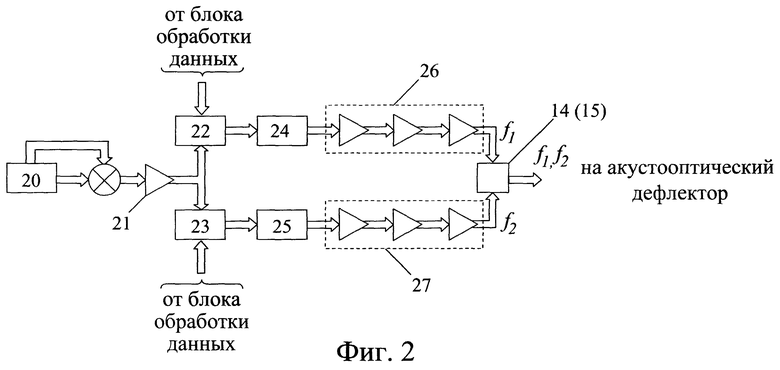
Фиг. 2 - принципиальная схема блока обработки данных.
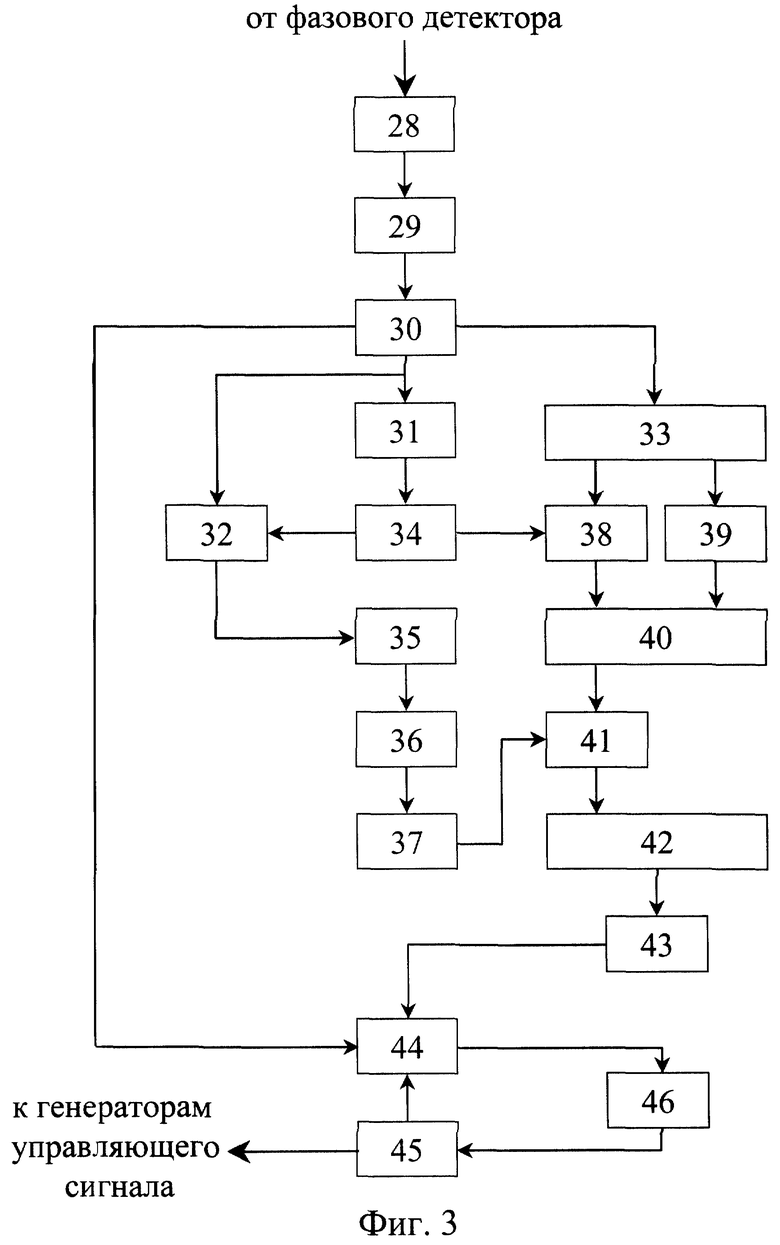
Фиг. 3 - схема генерации управляющего сигнала.
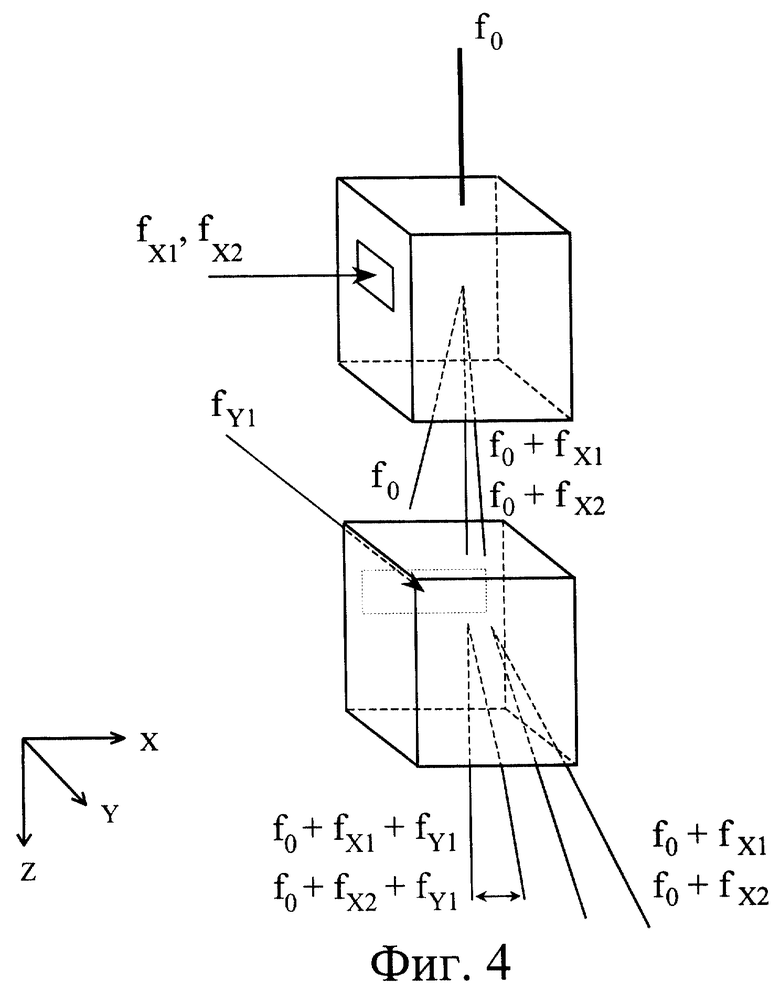
Фиг. 4 - первая схема разложения светового пучка.
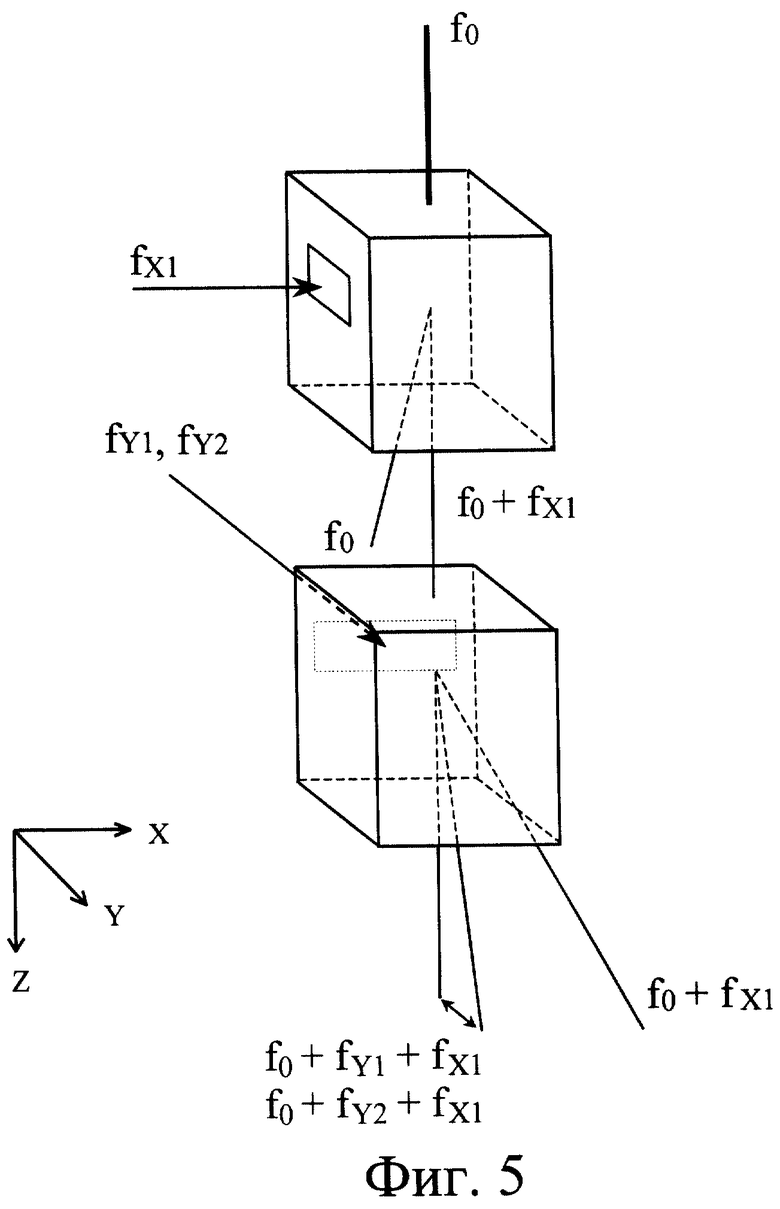
Фиг. 5 - вторая схема разложения светового пучка.
Устройство 1 включает в себя источник света 2, представляющий собой лазер, установленные по ходу светового пучка 3, первую оптическую систему 4, выполненную с возможностью расширения светового пучка, два акустооптических дефлектора 5 и 6, вторую оптическую систему 7, выполненную с возможностью сужения светового пучка, светоделитель 8 и объектив 9.
Акустооптические дефлекторы 5 и 6 выполнены с возможностью разделения светового пучка 3 по частоте и в пространстве на два луча, отклонения и сканирования разделенного светового пучка по одной из координат (X или Y). Акустооптические дефлекторы расположены с поворотом на 90o для разделения, отклонения и сканирования светового пучка по двум координатам (X и Y).
В устройстве могут применяться акустооптические дефлекторы, предназначенные для работы с лазерами различных длин волн. Возможно использование серийно выпускаемых дефлекторов. Недостатком большинства акустооптических дефлекторов является то, что после прохождения светового пучка через дефлектор изменяется направление оптической оси, что приводит к усложнению конструкции разрабатываемых на их основе устройств. В описываемом устройстве основные оптические элементы располагают на одной оси, проходящей через центр зоны исследуемой поверхности, поэтому применяют пару акустооптических дефлекторов, разработанный и оптимизированный для работы в этом устройстве. Для акустооптических дефлекторов, рассчитанных на двухкоординатное отклонение, из конструктивных соображений предпочтительно, чтобы направление дифрагированного луча на средней частоте диапазона совпадало с направлением падающего луча. Поэтому элементы выполняются слабо призматическими. Задача двухкоординатного сканирования как указано выше решается применением двух последовательно и ортогонально расположенных дефлекторов. Результатом реализации этой концепции является компактный и малогабаритный двухкоординатный дефлектор не изменяющий поперечных параметров оптического пучка (круглый пучок на входе - круглый пучок на выходе) и обеспечивающий направление дифрагированного пучка на средней частоте диапазона, совпадающее с направлением падающего.
Применение расширяющей световой пучок оптической системы 4 вызвана необходимостью обеспечения определенного диаметра светового пучка на входе в акустооптический дефлектор 5. Диаметр пучка задается количеством разрешимых положений светового пучка на выходе дефлектора, материалом, из которого изготовлен светозвукопровод дефлектора и другими параметрами. Обычно, диаметр пучка для современных дефлекторов составляет величину порядка 5-10 мм, а диаметр лазерного луча (например, газового лазера He-Ne) - порядка 1 мм, то есть, оптическая система должна иметь увеличение, задаваемое отношением диаметров пучков. Сужающая оптическая система 7 согласует диаметр сканируемого пучка со входным зрачком объектива 9 и ее параметры рассчитываются исходя из параметров объектива и требуемой величины поля зрения. Конструктивное выполнение оптических систем не имеет принципиального значения. Это могут быть системы, состоящие из двух или более сферических линз. Если лазерный пучок удовлетворяет необходимым требованиям по диаметру (например, некоторые полупроводниковые лазеры), то тогда расширяющая световой пучок телескопическая система может отсутствовать, а оптическая схема упрощается.
Светоделитель 8, используемый в устройстве имеет стандартную конструкцию. Основное требование, предъявляемое к светоделителю - это деление пучка света в равных долях для прошедшего и отклоненного света (интенсивность прошедшего и отклоненного света составляет величину около 50% от падающего света). Этим требованиям удовлетворяют как светоделитель в виде кубика из двух склеенных призм, так и светоделитель в виде тонкой пластинки, на одну сторону которой нанесен светоотражающий слой, а на вторую - просветляющее покрытие.
Устройство 1 также включает в себя по два генератора управляющих сигналов 10, 11, 12 и 13 для каждого акустооптического дефлектора 5, 6, при этом выходы каждой пары генераторов управляющих сигналов, связаны со входом соответствующего акустооптического дефлектора через сумматор 14 или 15.
В описываемом устройстве 1 используют генераторы управляющих сигналов синтезаторного типа, при этом разница частот управляющих сигналов соответствующей пары генераторов может быть различной, вплоть до стремящейся к нулевой, поэтому возникают повышенные требования к фазовой стабильности генераторов. Даже при суммировании сигналов от двух генераторов синтезаторного типа при равенстве частот возможны различия в фазах суммируемых сигналов величиной до 180o, что приводит к резкому изменению уровня управляющего сигнала. В описываемом устройстве эта проблема решается применением общего для двух синтезаторов генератора опорной частоты 20. Сигнал, получаемый от монолитного кварцевого генератора опорной частоты 20, умножается и сигнал, усиленный буферным усилителем 21, используется в качестве опорного одновременно для двух генераторов 22 и 23 (см. фиг. 3). Это обеспечивает жесткую привязку фаз сигналов с частотами f1 и f2. Сигналы проходят через фильтры низких частот 24 и 25, усиливаются и суммируются при помощи сумматора 14 (15). Сумматор выполнен на основе широкополосных линий передачи. Широкополосные усилители мощности 26 и 27 могут быть выполнены в двух вариантах: с использованием дискретных элементов или интегральных микросхем. Для обеспечения запаса по коэффициенту усиления используется три каскада с межкаскадным регулятором уровня сигнала.
Таким образом на выходе сумматора 14 (15) формируется сигнал, в спектре которого содержится две составляющие с частотами f1 и f2. Этот сигнал подается на вход акустооптического дефлектора 5 (6) и пьезопреобразователем преобразуется в акустический сигнал, в спектре которого также содержатся две составляющие (f1 и f2). При прохождении светового пучка 3 через акустооптический дефлектор 5 (6) происходит дифракция и на выходе дефлектора возникает несколько световых лучей. Кроме прошедшего луча (нулевой порядок дифракции), есть еще два дополнительных (первый порядок дифракции), соответствующих дифракции на спектральных составляющих акустического сигнала (f1 и f2). Причем поскольку частоты в спектре сигнала различаются, углы дифракции будут разными. Также различными будут величины смещения частот этих световых лучей. Таким образом, на выходе дефлектора присутствует два раздельных световых луча.
Требуемая величина расщепления задается соотношением частот f1 и f2 и может изменяться от номинальной величины, соответствующей расщеплению световых пятен на величину, равную их диаметру, до нулевого, когда пятна сливаются в одно (в последнем случае f1 = f2). Разность фаз двух суммируемых сигналов равна постоянной величине и может быть нулевой. Поскольку генераторы 10, 11 и 12, 13 имеют общие генераторы опорной частоты, нулевая разность фаз поддерживается во всем диапазоне перестройки частоты, что дает при суммировании мощность выходного сигнала равную Pвых. = P1 + P2, то есть, тем самым обеспечиваются близкие к оптимальным условия работы акустооптического дефлектора.
Устройство также включает в себя фотоприемники опорного 16 и измерительного 17 сигналов, причем светоделитель выполнен с возможностью направления части светового пучка от источника света на фотоприемник опорного сигнала и части отраженного светового пучка на фотоприемник измерительного сигнала, фазовый детектор 18, вход которого связан с выходами указанных фотоприемников, а выход с блоком обработки данных 19.
Используемые в устройстве 1 фотоприемники 16 и 17 могут быть фотоприемниками любого типа (германиевые и кремниевые фотодиоды, фотоэлектронные умножители и другие), обеспечивающими высокие параметры (чувствительность, отношение сигнал/шум, динамический диапазон, минимальные фазовые искажения).
На выходе фазового детектора 18 установлен фильтр низких частот (ФНЧ). Блок обработки данных 19 включает в себя аналогово-цифровой преобразователь 28, модуль подавления шума 29, узел выбора режима работы 30, первый 31 и второй 36 модули аппроксимации, первый 35 и второй 40 модули интегрирования, первый 33, второй 34 и третий 37 модули запоминания, первый 32, второй 38 и третий 41 модули сравнения, модуль коррекции 39, модуль калибровки 42, узел 43 расчета параметров поверхности, модуль отображения информации 44, модуль управления разверткой 45 и модуль 46 установки границ области исследуемой поверхности.
Аналогово-цифровой преобразователь (АЦП) 28 предназначен для преобразования аналогового сигнала, идущего с фазового детектора в цифровой сигнал. Модуль подавления шума 29 работает по принципу усреднения данных по отдельным точкам и линиям сканирования. Данные считываются несколько раз в каждой точке линии сканирования и каждая линия сканирования тоже считывается несколько раз. Затем полученные данные усредняются. Это приводит к уменьшению шумов, присутствующих в системе. Количество точек и линий усреднения определяется пользователем.
Узел выбора режима работы 30 позволяет задавать основные режимы работы системы, такие как режим сканирования и считывания данных (измерением конечных приращений профиля поверхности объекта по осям X или Y), режим вывода данных на устройство отображения модуля отображения информации (непосредственно считанные данные или восстановленный профиль (рельеф) исследуемой поверхности), создание приборных функций устройства, то есть совокупности значений разности фаз для каждой точки растра сканирования при сканировании эталонной поверхности с разложением луча по оси X или оси Y и совокупности проинтегрированных значений, калибровка устройства.
Модули аппроксимации 31 и 36 также используется при создании приборной функции устройства, которая характеризует искажения, вносимые в измеряемые данные оптической частью устройства. Данные, поступающие на вход этих модулей, аппроксимируются двумерным полиномом. Модули запоминания предназначены для хранения соответствующих значений во всех точках растра сканирования.
Модули сравнения 32, 38 и 41 используются для исключения из измеряемых данных искажений, вызванных оптической частью устройства, которые определяются на основе данных, полученных при измерении разности фаз отраженных лучей в соответствующих точках эталонной поверхности. На вход соответствующего модуля поступают данные по исследуемой поверхности, представляющие из себя значения разности фаз для каждой точки растра сканирования при сканировании с разложение луча по оси X или оси Y (ΔφX(x,y) или ΔφY(x,y)) или проинтегрированные значения (восстановленный профиль (рельеф) исследуемой поверхности) и значения приборной функции, соответственно, по разности фаз и проинтегрированным значениям в каждой точке эталонной поверхности. Далее приборная функция вычитается из данных по исследуемой поверхности, и на выходе получаются данные без искажений.
Модуль коррекции 39 используется при исследовании шероховатости поверхности. Принцип его работы основан на коррекции данных в каждой сканируемой строке непосредственно при сканировании исследуемой поверхности путем аппроксимации входных данных полиномом заданной степени по методу наименьших квадратов и вычитания этого полинома из измеряемых данных. Эта операция приводит к исключению из измеряемых данных искажений, вносимых оптической частью устройства, а также к устранению медленно меняющихся неровностей поверхности объекта, приводящих к неправильному определению параметров шероховатости. Модули интегрирования 35 и 40 представляют из себя низкочастотные фильтры пространственных частот, которые имеют амплитудно-частотную характеристику вида  - пространственные частоты объекта в двумерной Фурье-плоскости) в зависимости от типа входящих данных ΔφX(x,y) или ΔφY(x,y) соответственно. Данные модули предназначены для двумерного восстановления из входных данных рельефа поверхности, что позволяет не только восстанавливать рельефы поверхностей объектов произвольной формы, но и уменьшать степень неточности при восстановлении.
- пространственные частоты объекта в двумерной Фурье-плоскости) в зависимости от типа входящих данных ΔφX(x,y) или ΔφY(x,y) соответственно. Данные модули предназначены для двумерного восстановления из входных данных рельефа поверхности, что позволяет не только восстанавливать рельефы поверхностей объектов произвольной формы, но и уменьшать степень неточности при восстановлении.
Модуль калибровки 42 предназначен для преобразования данных, поступающих на его вход, из условных единиц в реальные единицы длины и высоты, а именно в микрометры. Для правильной работы этого модуля необходимо произвести процесс калибровки устройства на тестовых объектах с заведомо известными параметрами длины и высоты. В результате этой операции в модуле калибровки будет хранится информация о том сколько микрометров приходится на одну условную единицу длины для каждой координатной оси устройства. Процесс калибровки необходимо производить каждый раз при изменениях производимых в оптической части устройства (например, при смене объектива), а также при изменениях значений величины разделения сканирующего лазерного пучка. Узел 43 расчета параметров поверхности используется для получения информации об объеме заданной области исследуемой поверхности объекта, находящейся выше нулевого уровня, ниже нулевого уровня, а также общем объеме этой области, значении масс объекта соответствующих указанным выше объемам, средней высоте и глубине объекта в каждой строке растра, а также о параметрах шероховатости Ra, Rmax, Rz и Sm заданной области объекта исследования.
Модуль отображения информации 44 предназначен для вывода данных об объекте на устройство отображения, а именно на экран монитора компьютера. При этом обеспечивается возможность представления исходных данных на экране в трех режимах. Первый режим осуществляет вывод данных на экран в виде двумерного изображения объекта с цветокодированным представлением данных, где цветовое соответствие данных определяется выбранной палитрой. Второй режим позволяет выводить на экран изображения профиля объекта в отдельных строках растра как по горизонтали, так и по вертикали. Третий режим работы модуля обеспечивает представление объекта на экране монитора в трехмерном виде в выбранном цветовом режиме с заданным разрешением. Модуль 46 установки границ области исследуемой поверхности служит для задания границ области сканирования исследуемого объекта и для изменения расположения этой области на объекте. Модуль управления разверткой 45 обеспечивает задание необходимых управляющих частот для акустооптических дефлекторов, соответствующих выбранным параметрам растра сканирования и заданным границам области сканирования, а также управляет режимами расщепления лазерных лучей в дефлекторах и количеством считываемых точек растра сканирования.
Фазовый детектор 18 через аналогово-цифровой преобразователь 28, модуль подавления шума 29 и узел выбора режима работы 30 связан с входом третьего модуля сравнения 32, первого модуля запоминания 33 (для значений разности фаз отраженных лучей светового пучка в соответствующих точках исследуемой поверхности) и первого модуля аппроксимации 31. Выход модуля 31 связан с входом второго модуля запоминания 34 (для аппроксимированных значений разности фаз отраженных лучей светового пучка в соответствующих точках эталонной поверхности). Выход модуля 34 связан со вторым входом упомянутого третьего модуля сравнения 32, выход которого связан с входом первого модуля интегрирования 35. Выход модуля 35 связан со входом второго модуля аппроксимации 36, выход которого связан с входом третьего модуля запоминания 37 (для проинтегрированных и аппроксимированных значений разности фаз отраженных лучей светового пучка для эталонной поверхности). Выходы первого 33 и второго 34 модулей запоминания связаны со входами первого модуля сравнения 38, выход которого связан с первым входом второго модуля интегрирования 40. Второй вход модуля 40 связан через модуль коррекции 39 с выходом упомянутого первого модуля запоминания 33. Выходы второго модуля интегрирования 40 и третьего модуль запоминания 37 связаны со входами второго модуля сравнения 41, выход которого связан с первым входом модуля калибровки 42, а второй вход модуля 42 связан со вторым выходом второго модуля интегрирования 40. Выход модуля калибровки 42 связан с узлом 43 расчета параметров поверхности, связанным с первым входом модуля отображения информации 44. Со вторым входом модуля 44 связан один из выходов узла выбора режима работы 30, а с третьим входом связан модуль управления разверткой 45. Модуль 45 связан с упомянутыми генераторами управляющих сигналов 10, 11, 12 и 13. Со входом модуля управления разверткой 45 связан модуль 46 установки границ области исследуемой поверхности, вход которого связан с упомянутым модулем отображения информации 44.
Устройство работает следующим образом.
Последовательно сканируют каждую точку как исследуемой, так и эталонной поверхности световым пучком, разделенным на, по меньшей мере, два параксиальных луча. Возможно несколько вариантов сканирования одной и той же поверхности дважды:
- сканирование вдоль оси X с разделением светового пучка в направлении оси X и вдоль оси X с разделением в направлении оси Y,
- сканирование вдоль оси Y с разделением светового пучка в направлении оси Y и вдоль оси Y с разделением в направлении оси X,
- сканирование вдоль оси X с разделением светового пучка в направлении оси Y и вдоль Y оси с разделением в направлении оси X,
- сканирование вдоль оси X с разделением светового пучка в направлении оси X и вдоль Y оси с разделением в направлении оси Y.
Последний вариант является более предпочтительным, так как позволяет непосредственно получать частные производные в направлении X и Y.
Формирование лучей производится с соответствии со схемами, изображенными на фиг. 4 и фиг. 5. В первом случае на акустооптический дефлектор, отклоняющий луч вдоль координаты X подают сигнала с составляющими, имеющими частоты fX1, fX2, причем fX1- fX2 = δfX - требуемая разница частот в направлении X, а на акустооптический дефлектор, отклоняющий луч вдоль координаты Y подают сигнал с частотой fY1. Это обеспечивает расщепление пучка в направлении оси X. В то же время частоты fX1, fX2 и fY изменяются в диапазоне частот ΔfX,Y , что обеспечивает сканирование лучей в задан ном направлении и в заданных пределах.
Во втором случае на акустооптический дефлектор, отклоняющий луч вдоль координаты X, подается сигнал с частотой fX1. На акустооптический дефлектор, отклоняющий луч вдоль координаты Y, подают сигнала с составляющими, имеющими частоты fY1, fY2, причем fY1- fY2, = δfY - требуемая разница частот в направлении Y. Это обеспечивает расщепление пучка в направлении оси Y. Частоты fX, и fY1, fY2 изменяются в диапазоне частот ΔfX,Y , что также обеспечивает сканирование лучей в заданном направлении и в заданных пределах.
Для определения параметров исследуемой поверхности и построения ее изображения предварительно сканируют световым пучком эталонную поверхность для получения приборной функции, при этом в блоке обработки данных 19 в первом модуле аппроксимации 31 происходит аппроксимация данных о разности фаз отраженных лучей в исследуемых точках эталонной поверхности. Полученные данные сохраняются во втором модуле запоминания 34. В третьем модуле сравнения 32 происходит корректировка данных, полученных при измерении разности фаз отраженных лучей в соответствующих точках эталонной поверхности, на основе сохраненных в модуле 34 данных. Затем в первом модуле интегрирования 35 происходит двумерное интегрирование данных, поступающих с выхода модуля 32, а во втором модуле аппроксимации 36 происходит аппроксимация проинтегрированных данных. Полученные в результате данные сохраняются во втором модуле запоминания 37. Затем сканируют исследуемую поверхность по тем же траекториям, что и эталонную поверхность, при этом требуемый режим работы устройства выбирается посредством узла 30. В первом модуле сравнения 38 блока обработки данных 19 происходит корректировка данных, полученные при измерении разности фаз отраженных лучей в соответствующих точках исследуемой поверхности, на основе сохраненных в модуле 34 данных. Затем во втором модуле интегрирования 40 происходит двумерное интегрирование скорректированных значений вдоль траекторий перемещения светового пучка, а во втором модуле сравнения происходит корректировка полученных при интегрировании данных на основе данных, сохраненных в модуле 37. После чего в узле 43 рассчитывают параметры поверхности и строят ее изображение на устройстве отображения модуля отображения информации 44.
Описанная выше конструкция и работа устройства для дифференциально-фазовой профилометрии и/или профилографии, выполненного в соответствии с изобретениями, заявленной группы изобретений, доказывает возможность реализации назначения изобретения и достижения указанного выше технического результата, но при этом не исчерпывает всех возможностей осуществления изобретения, охарактеризованного совокупностью признаков, приведенной в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2015 |
|
RU2659720C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МИКРОРЕЛЬЕФА ПОВЕРХНОСТИ ИНТЕРФЕРЕНЦИОННЫМ МЕТОДОМ | 2007 |
|
RU2373494C2 |
| СПОСОБ ЛАЗЕРНОГО КОНТРОЛЯ ФОРМЫ ПРОКАТЫВАЕМОЙ ПОЛОСЫ | 2002 |
|
RU2245514C2 |
| Способ исследования рельефных и фазовых объектов и лазерный сканирующий микроскоп для его осуществления | 1989 |
|
SU1734066A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2529732C1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| АКУСТООПТИЧЕСКИЙ АНИЗОТРОПНЫЙ ДЕФЛЕКТОР | 2011 |
|
RU2462739C1 |
| Акустооптическое устройство для двухкоординатного отклонения оптического луча | 1991 |
|
SU1800434A1 |
| АКУСТООПТИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2486553C1 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ МИКРОСКОП (ВАРИАНТЫ) | 2014 |
|
RU2574863C1 |
Изобретение относится к оптическим измерительным устройствам, в частности к способам и средствам оптической профилометрии и/или профилографии. Способ заключается в том, что предварительно сканируют световым пучком эталонную поверхность, а затем по тем же траекториям сканируют исследуемую поверхность. При этом последовательно сканируют исследуемую и эталонную поверхности двумя световыми пучками, разделенными на два параксиальных луча. Один из лучей сдвигают относительно другого по частоте и в пространстве. Данные о разности фаз отраженных лучей корректируют на основе данных о разности фаз отраженных лучей и о проинтегрированных по траекториям сканирования данных для эталонной поверхности. Устройство включает в себя два акустооптических дефлектора, два генератора управляющих сигналов для каждого акустооптического дефлектора с общим генератором опорной частоты и блок обработки данных. Изобретение позволяет повысить точность построения изображения исследуемой поверхности и точность определения параметров профиля исследуемой поверхности, а также обеспечить возможность исследования поверхностей объектов произвольной формы. 2 с. и 9 з.п. ф-лы, 5 ил.
| US 4577967 А, 25.03.1986 | |||
| US 5481360 А, 02.01.1996 | |||
| СПОСОБ ПРОФИЛАКТИКИ ПРОФЕССИОНАЛЬНЫХ ЗАБОЛЕВАНИЙ РУК ОТ ПЕРЕНАПРЯЖЕНИЯ И ЛОКАЛЬНОЙ ВИБРАЦИИ | 1996 |
|
RU2146116C1 |
| Способ исследования рельефных и фазовых объектов и лазерный сканирующий микроскоп для его осуществления | 1989 |
|
SU1734066A1 |

