Изобретение относится к устройству и способу для определения положения первого вала и соединенного с первым валом посредством сочленения второго вала относительно друг друга, причем первый измерительный модуль установлен на периферийной поверхности первого вала, а второй измерительный модуль установлен на периферийной поверхности второго вала. При этом как минимум один из двух измерительных модулей оснащен средствами для формирования как минимум одного светового пучка, и как минимум один из двух измерительных модулей оснащен средствами индикации для учета данных о точке падения светового пучка как минимум на одну индикационную поверхность. Кроме того, как минимум один из двух измерительных модулей оснащен датчиком учета угла поворота вала. Блок обработки результатов позволяет на основании точек падения светового пучка, определенных по нескольким измерительным точкам, то есть по нескольким положениям угла поворота, вычислить параллельное смещение, а также вертикальный и горизонтальный угловой перекос, причем обычно это осуществляется с помощью способа подбора кривой.
Обзор подобных устройств для измерения центрирования валов содержится в заявке US 6,434,849 В1, причем обработка данных также представлена с помощью способа подбора кривой, принимающей форму эллипса.
В заявках DE 3320163 А1 и DE 3911307 A1 описаны устройства для измерения центрирования валов, у которых первый измерительный модуль посылает световой луч, отражаемый призменным отражателем второго измерительного модуля обратно на двуосный оптический детектор первого измерительного модуля.
Из заявки DE 3814466 A1 известно устройство для измерения центрирования валов, в котором первый измерительный модуль посылает световой луч, падающий на два визуально расположенных друг за другом в осевом направлении двуосных оптических детектора второго измерительного модуля.
В заявке DE 3335336 A1 описано устройство для измерения центрирования валов, в котором как первый, так и второй измерительные модули посылают световые лучи и содержат двуосные оптические детекторы, причем каждый световой луч направлен на детектор другого измерительного модуля. Устройство, работающее на основе этого принципа, описано в заявке US 6,873,931 В1, причем каждый измерительный модуль оснащен двумя двуосными датчиками ускорения для автоматического учета угла поворота вала.
В заявке ЕР 2093537 описано устройство для измерения центрирования валов, в котором первый измерительный модуль посылает расходящийся луч, падающий на два оптических полосных детектора, установленных сбоку и расположенных параллельно на определенном расстоянии друг от друга, причем продольное направление детекторов вертикально по отношению к плоскости расхождения светового луча, причем описано не только определение центрирования валов относительно друг друга, но и определение зазора сочленения.
Из заявки WO 2010/042039 А1 известно устройство для измерения центрирования валов, в котором каждый из двух измерительных модулей оснащен установленной на корпусе камерой, причем на обращенной к другому модулю стороне корпуса расположен оптический образец, снимаемый находящейся напротив камерой. На стороне корпуса, содержащей образец, имеется при этом отверстие, через которое отображается образец, расположенный напротив. При альтернативном исполнении один из двух модулей оснащен лишь камерой, но не содержит образца, в то время как другой модуль не имеет камеры, однако содержит объемный образец.
В заявке ЕР 1211480 А2 описано устройство для измерения центрирования валов, в котором первый измерительный модуль оснащен источником света, направляющим световой луч на второй измерительный модуль, содержащий матовую пластинку; отдаленная от первого измерительного модуля сторона матовой пластинки проецируется с помощью соответствующей оптики на детектор изображения, также являющийся частью второго измерительного модуля.
В заявке US 6,981,333 В2 описано, как определяются колебания, возникающие при измерении центрирования валов посредством гироскопических датчиков, чтобы по возможности избежать искажений, спровоцированных такими колебаниями.
В заявке US 5,980,094 описан способ измерения центрирования валов, при котором, как и в заявке DE 3335336 А1, каждый из двух измерительных модулей направляет световой луч на двуосный оптический детектор другого измерительного модуля, причем для обработки данных по каждому из двух детекторов продольная составляющая точки падения светового луча наносится в виде функции угла поворота, и в каждом случае к данным измерения подбирается соответствующая синусоидальная кривая. При этом для вычисленного и обработанного блока данных вычисляется доверительный коэффициент, базирующийся на количестве точек измерения и угловом распределении точек измерения.
Кроме этого предлагается из вычисленного блока данных вручную или автоматически удалять подозрительные информационные точки, причем на основе сокращенного таким образом блока данных осуществляется новый подбор кривой и проверяется факт повышения доверительного коэффициента за счет сокращения блока данных. Не указано, однако, каким образом возможна идентификация подозрительных информационных точек, кроме как на основании факта повышения доверительного коэффициента в результате удаления этих информационных точек. Похожий способ центрирования валов описан в заявке US 5,263,261.
Задачей настоящего изобретения является создание устройства для измерения центрирования валов и способа измерения центрирования валов, что обеспечит более простое и надежное измерение.
В соответствии с данным изобретением эта задача решена благодаря устройству согласно пункту формулы изобретения 1 и способу согласно пункту формулы изобретения 28.
Преимущество данного решения согласно изобретению состоит в том, что по каждой отдельной точке измерения осуществляется оценка качества соответствующих данных на основании угловой скорости, углового ускорения и разности тангенциальной составляющей точки падения и точки падения предыдущей точки измерения в зависимости от интервала до предыдущей точки измерения и степени отклонения точки падения от кривой, подобранной как минимум к одной части вычисленной точки падения. Преимуществом также является, что данные точки падения не учитываются при вычислении смещения вала, если в результате оценки качества этих данных получается значение ниже пороговой величины, так что надежные данные измерения удается получить простым способом и удалить их в случае необходимости в целях повышения надежности вычисления смещения вала.
Преимущества разработки очевидны из зависимых пунктов формулы изобретения. Далее примеры изобретения поясняются с помощью прилагаемых чертежей, причем:
Фиг. 1 - схематичное изображение, вид сбоку, устройство для центрирования валов в соответствии с изобретением согласно примеру 1;
Фиг. 2 - схематичное пространственное изображение примера измерительного модуля с двумя оптическими детекторами, которые могут быть использованы в устройстве согласно фиг. 1;
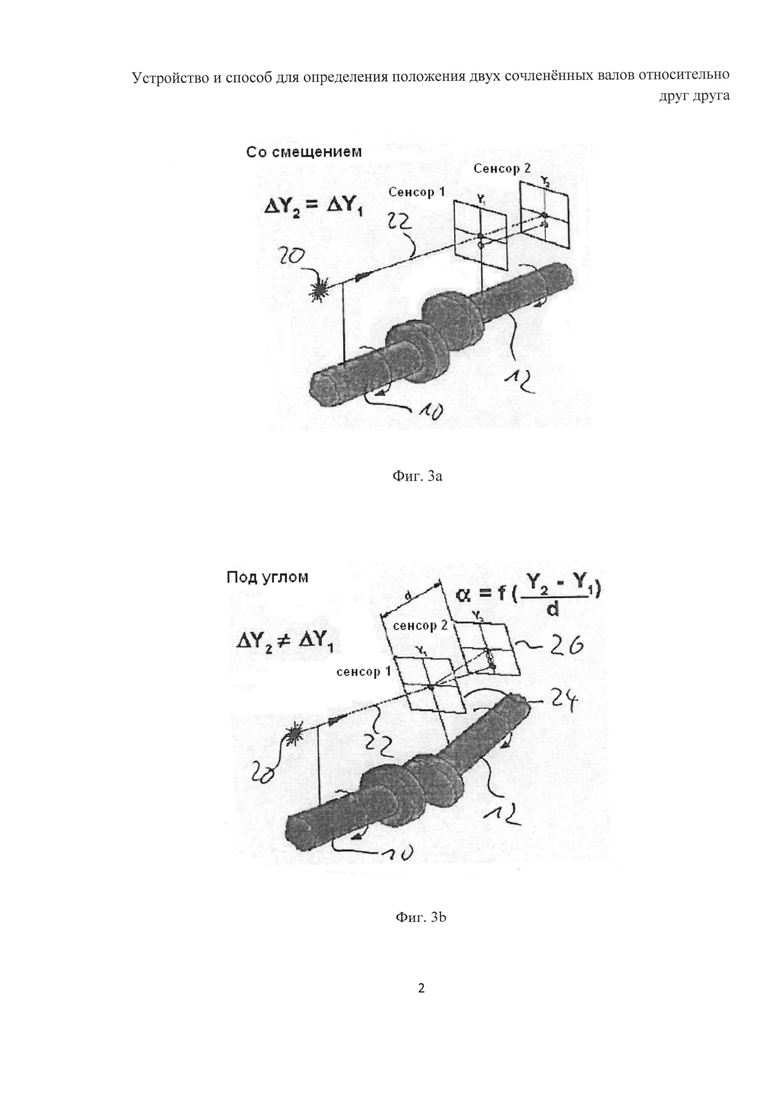
Фиг. 3А и 3Б - схематичная иллюстрация точек падения светового луча в устройстве согласно фиг. 1 при параллельном смещении или вертикальном угловом перекосе обоих валов;
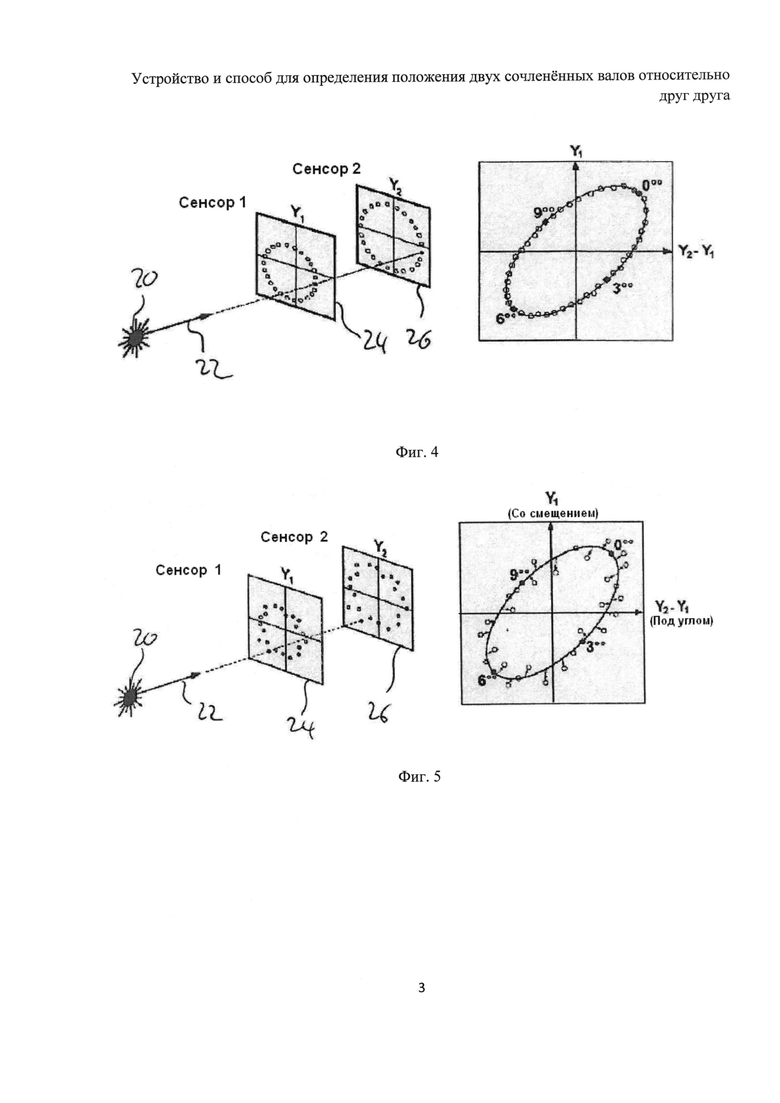
Фиг. 4 - иллюстрация точек падения светового луча в устройстве фиг. 1 при полном обороте валов в процессе измерения при относительно надежном измерении;
Фиг. 5 - вид как на фиг. 4, причем изображено менее надежное измерение;
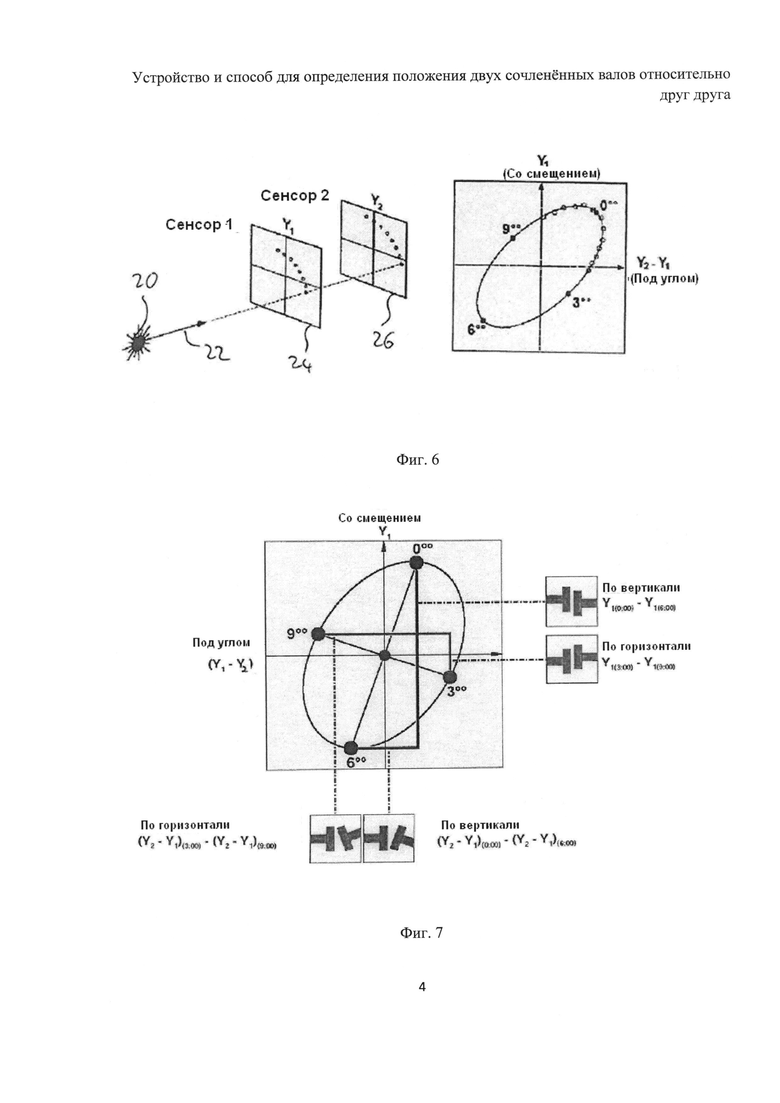
Фиг. 6 - вид как на фиг. 4, причем измерение произведено лишь с учетом части полного оборота валов;
Фиг. 7 - иллюстрация обработки данных кривой, полученной при измерениях в соответствии с фиг. 4-6;
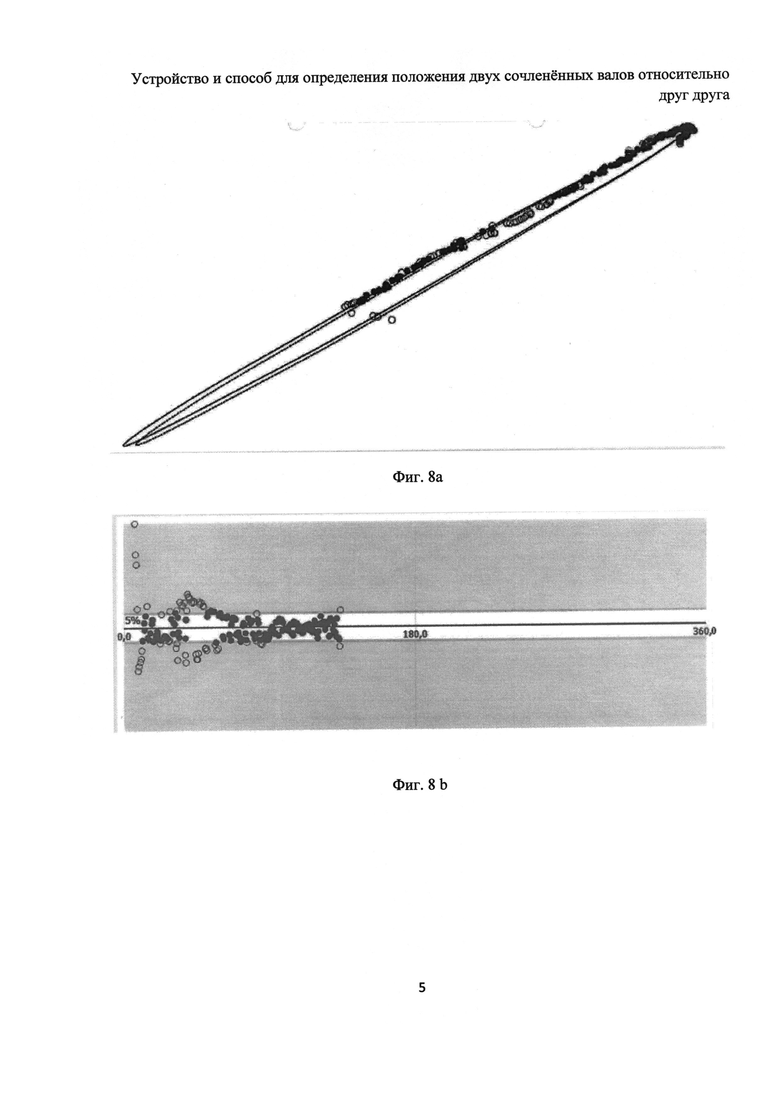
Фиг. 8А и 8Б - практический пример точек измерения согласно фиг. 4-7, причем точки измерения показаны с подобранной кривой (фиг. 8А); на рис 8Б выраженное в процентах отклонение каждой точки измерения от подобранной кривой фиг. 8А представлено в виде функции угла поворота;
Фиг. 9А и 9Б вид как на фиг. 8А и фиг. 8Б, причем показан другой пример;
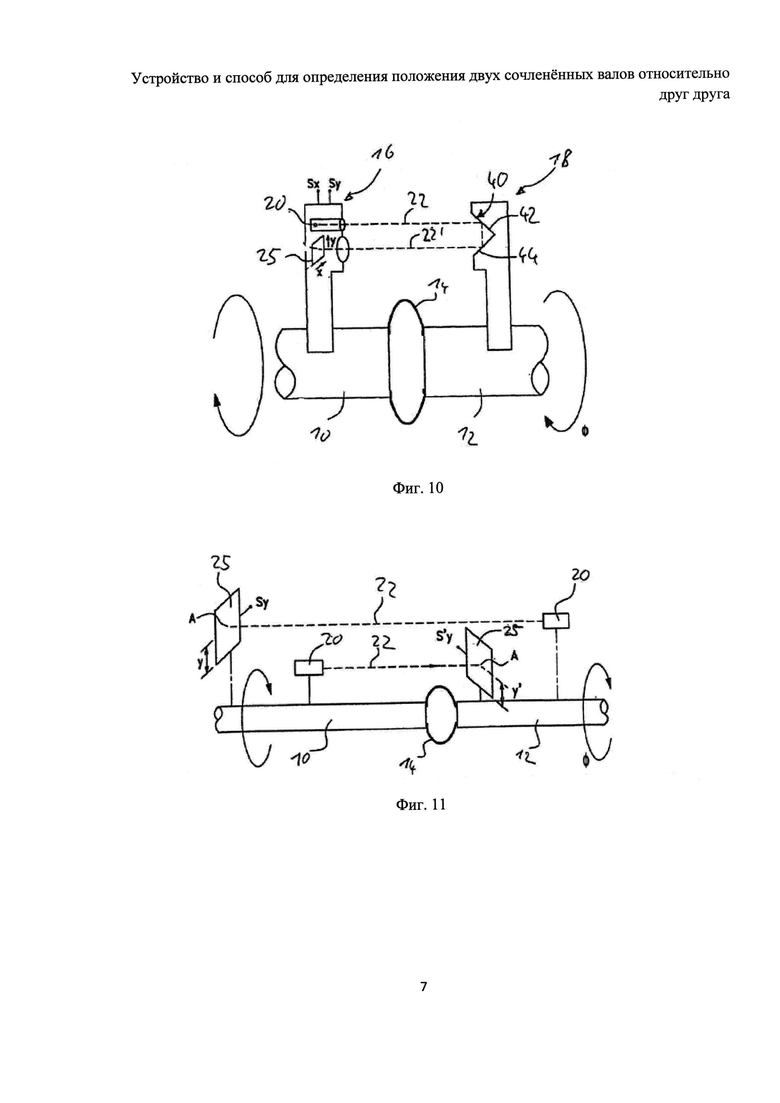
Фиг. 10 вид как на фиг. 1, причем схематично представлен альтернативный способ измерения; и
Фиг. 11 вид как на фиг. 1, причем схематично представлен еще один альтернативный способ измерения.
На фиг. 1 схематично изображено устройство, посредством которого можно определить центрирование первого вала 10 относительно второго вала 12, который посредством сочленения 14 соединен с первым валом. Оба вала 10, 12 установлены друг за другом по прямой. Устройство включает первый измерительный модуль 16, прочно закрепляемый на периферийной поверхности первого вала 10, и второй измерительный модуль 18, прочно закрепляемый на периферийной поверхности второго вала 12. Первый измерительный модуль 16 содержит источник лазерного света для формирования светового луча или светового пучка 22, направленного на второй измерительный модуль 18. Второй измерительный модуль 18 содержит две визуально расположенные друг за другом со смещением в осевом направлении индикационные поверхности 24 и 26, которые обычно представлены в виде двуосного оптического детектора. Для вычисления смещения обоих валов 10 и 12 относительно друг друга валы вместе поворачиваются вокруг своей оси (причем, как правило, лишь один из валов приводится в действие приводом); при этом в нескольких точках измерения, каждая из которых соответствует определенному положению угла поворота, осуществляется учет точек падения светового луча 22 на обе индикационные поверхности 24 и 26. В показанном примере продольная составляющая обозначена Y или Y′ а тангенциальная составляющая Х или X′.
Кроме того, второй измерительный модуль 18 содержит как минимум один датчик 28, позволяющий учитывать угол поворота второго измерительного модуля 18 и, соответственно, угол поворота валов 10 и 12, а также угловую скорость и угловое ускорение. При этом речь идет как минимум об одном акселерометре и как минимум одном гироскопе, причем в обоих случаях сенсор представлен в виде унифицированного блока MEMS. Точное вычисление угла поворота посредством двух двуосных датчиков акселерометра описано, к примеру, в заявке US 6,873,931 В1. Кроме того, второй измерительный модуль 18 содержит блок обработки результатов 30, на который поступают данные датчика 28 и данные оптических датчиков 24 и 26 для их последующей обработки и итогового вычисления смещения вала.
Пример того, как это может быть реализовано с помощью установленных друг за другом оптических индикационных поверхностей, представлен на фиг. 2, причем данный принцип детально описан в заявке DE 3814466 А1. Второй измерительный модуль 18 оснащен при этом линзой 32, разделителем луча 34, а также зеркалом 36, причем луч 22 поступает через линзу 32 и попадает на разделитель луча 34, причем часть луча 22 преобразуется в луч 22′ и падает на первый детектор 24, в то время как часть 22′′ луча 22 отражается разделителем луча 34 на зеркало 36 и оттуда на второй детектор 26. При этом в показанном примере обе индикационные поверхности 22 и 24 смещены в пространстве относительно друг друга не в осевом направлении, а продольно (или тангенциально), в то время как вторая индикационная поверхность 26 визуально (или виртуально) в результате воздействия разделителя луча 34 и зеркала 36 расположена за первой индикационной поверхностью 24 со смещением в осевом направлении (то есть точки падения частичных лучей 22′ и 22′′ таковы, как будто обе индикационные поверхности 22 и 24 расположены друг за другом в осевом направлении).
Для вычисления точки падения луча 22 на первую индикационную поверхность 24 или вторую индикационную поверхность 26 можно, например, прибегнуть к расчету центра инерции, если световое пятно распространяется на несколько пикселей детектора. Подобное вычисление точки падения не может быть произведено ни в самом детекторе, ни в блоке обработки результатов 30.
На фиг. 3А и 3Б схематично изображено последствие вертикального параллельного смещения или вертикального углового перекоса валов 10 и 12 относительно друг друга с учетом точки падения на первом детекторе 24 и втором детекторе 26, причем показано перемещение точек падения во время поворота валов 10 и 12.
На фиг. 4 показан типичный случай перемещения точек падения во время поворота валов, то есть когда имеет место как параллельное смещение, так и вертикальный и горизонтальный угловые перекосы. При этом на обеих индикационных поверхностях образуется по кругу. Для вычисления смещения валов данные о точках падения наносятся обычно таким образом, что в одном направлении на расположенную ближе к световому источнику индикационную поверхность 24 (обозначенную в примере как Y1), наносится продольная составляющая точки падения, в то время как в другом направлении на индикационные поверхности 24 и 26 (обозначенные в примере как Y1 и Y2) наносится разность продольных составляющих точек падения. В типичном и идеальном случае нанесенные таким образом точки измерения расположены на эллипсе, приведенном в соотношение параметризации с углом поворота вала. На примере фиг. 4 вершины эллипса соответствуют следующим положениям измерительного модуля в процессе поворота вала: 0 часов, шесть часов, три часа, девять часов (однако в типичном случае эти положения не совпадают с вершинами эллипса). Параметры искомого эллипса вычисляются, как правило, посредством подбора кривой к точкам измерения. На основании формы полученного таким образом эллипса можно затем вычислить вертикальный угловой перекос и горизонтальный угловой перекос валов, как показано на фиг. 7. Здесь можно обратиться например к заявке DE 3911307 A1.
Впрочем, на практике точки измерения не располагаются точно на эллиптической кривой, так как различные погрешности измерения могут привести к соответствующим отклонениям. Одна из возникающих в этой связи проблем состоит, например, в неизбежном наличии зазора в сочленении 14, что ведет к отсутствию жесткого сцепления при вращении валов 10 и 12, так что на момент начала вращения вала 10 от привода вал 12 еще не вращается или вращается медленнее, чем вал 10. Это ведет к смещению измерительных модулей 16 и 18 в тангенциальном направлении относительно друг друга, что влияет также на продольную составляющую точек падения светового луча 22 на индикационные поверхности 24 и 26. Кроме того, сильное угловое ускорение, вызванное подвижностью или инерционностью измерительных модулей 16 и 18, может привести к тангенциальному смещению между валом и соответствующим измерительным модулем, а также к смещению валов относительно друг друга при вращении. Соединение между соответствующим измерительным модулем и валом, если оно не оптимально, то есть абсолютно жесткое, также может привести к отклонению точек падения.
На фиг. 5 представлен пример не идеального измерения, причем отдельные точки измерения частично существенно отклоняются от подобранного к точкам измерения эллипса.
Как правило, результат подбора кривой и, соответственно, вычисление смещения вала тем ненадежнее, чем больше среднее квадратическое отклонение точек измерения от подобранного эллипса.
Надежность подбора кривой можно повысить, если проводить оценку качества отдельных точек измерения по определенным критериям, и точки измерения с низким качеством, либо не учитывать при обработке результатов, то есть при подборе кривой, либо учитывать их в меньшей степени. При оценке качества отдельных точек измерения можно пользоваться следующими критериями: угловое ускорение и угловая скорость, разность тангенциальной составляющей точки падения или точек падения и тангенциальной составляющей точки падения или точек падения предыдущей точки измерения в зависимости от интервала до предыдущей точки измерения; степень отклонения точки падения от кривой, подобранной как минимум к одной части вычисленной точки падения, интенсивность колебаний во время измерения, изменение углового ускорения; интервал от точки измерения до точки начала отсчета вращательного движения, причем точкой начала отсчета может быть начало вращательного движения; для учета интенсивности колебаний датчик 28, предназначенный для учета угла поворота, выполнен соответствующим образом; наиболее подходящим при этом является датчик акселерометра. Чем выше интенсивность колебаний точки измерения, тем ниже результат ее оценки.
Оценка точки измерения тем хуже, чем ближе она расположена к моменту начала вращательного движения, так как при начале вращения валов 10 и 12 зазор сочленения играет гораздо большую роль, что может оказать негативное влияние на соответствующие результаты измерения.
Чем больше угловое ускорение или изменение углового ускорения, тем хуже оценка точки измерения, так как при высоком ускорении или сильном изменении ускорения по причине инерционного эффекта возникает серьезная опасность искажения результатов измерения.
Высокая угловая скорость также ведет к ухудшению оценки точки измерения.
В большинстве случаев оценка точки измерения тем хуже, чем больше разность тангенциальной составляющей точки падения и тангенциальной составляющей точки падения предыдущей точки измерения в зависимости от интервала до предыдущей точки измерения, поскольку это свидетельствует о различной угловой скорости обоих валов на момент измерения, что негативно влияет на результат измерения.
Несмотря на то что это очевидно повысит надежность вычисления смещения валов, расположение точек измерения по всей траектории вращения валов 10 и 12 не носит принципиального характера. Вместо этого вполне достаточно производить измерения лишь на части оборота валов 10 и 12, так как с помощью подбора кривой возможна экстраполяция на не охваченный диапазон угла поворота. Примером может послужить фиг. 6, где пройденный диапазон поворота угла составляет лишь 100°.
При этом после прохождения определенного количества точек измерения, то есть после прохождения определенного углового диапазона, можно проводить общую оценку качества данных по пройденным до данного момента точкам измерения на основании отдельных точек измерения. Здесь также может быть применен подбор кривой, основанный на пройденных до данного момента точках измерения. Таким образом может быть сформулирован результат общей оценки качества.
Например, общая оценка качества может осуществляться на основании сформулированных соответствующим образом результатов оценки отдельных аспектов. При этом можно установить пороговую величину для общей оценки качества измерения, причем в зависимости от того, достиг ли полученный результат этой пороговой величины или еще нет, формируется сообщение о том, следует ли закончить измерение или продолжать его, чтобы достичь необходимого качества. Если, например, при измерении на диапазоне 90° получены не достаточно качественные точки измерения (например, по причине большого зазора в сочленении или/и прерывистости вращательного движения), блок обработки результатов принимает решение необходимости продолжать измерение. Если же качественных точек измерение уже достаточно, то измерение может быть закончено.
Для оценки качества отдельных точек измерения в систему оценки общего качества дополнительно могут быть включены распределение точек измерения по углу поворота и количество точек измерения. При этом равномерное распределение по углу поворота и большое количество точек измерения ведет к повышению оценки качества.
Среднее отклонение отдельных точек измерения от подобранной кривой, то есть среднее квадратическое отклонение подбора, также можно учитывать при определении общего качества.
На фиг. 8А и 8Б представлении еще один пример оценки данных измерения, в котором присутствуют точки измерения, содержащие ошибки, причем при нанесении эллипса в процессе подбора кривой учитывались лишь те результаты измерений, отклонение которых от эллипса, подобранного ко всем точкам измерения, составили не более 5% (черные круги), в то время как результаты измерений с большим отклонением (не закрашенные круги) при подборе не учитывались (эллипс, получившийся в результате подбора ко всем точкам измерения представлен в заштрихованном виде).
Похожий пример представлен на фиг. 8А и 8Б.
Как уже упоминалось, датчик 28 должен представлять собой как минимум двуосный датчик акселерометра. Впрочем, для повышения точности определения угла можно предусмотреть два таких датчика акселерометра.
В то время как в описанном выше примере исполнения датчиком определения угла поворота оснащен лишь второй измерительный модуль, в альтернативной форме исполнения оба измерительных модуля оснащены как минимум одним датчиком угла поворота (на фиг. 1 такой дополнительный датчик угла поворота измерительного модуля 16 указан под номером 38). В этом случае между первым и вторым измерительными модулями 16, 18 необходимо предусмотреть канал передачи данных, для того чтобы блок обработки результатов 30 мог учитывать все имеющиеся данные с датчиков угла поворота. При этом определится разница между положением угла поворота, вычисленном посредством первого измерительного модуля 16 и положением угла поворота, вычисленном с помощью данных второго измерительного модуля 18, что поможет вычислить зазор сочленения и учесть его при оценке качества отдельных точек измерения и/или при оценке общего качества.
Как уже упоминалось, вычисление точек падения светового пучка 22 может осуществляться с помощью соответствующего двуосного оптического детектора. Впрочем, возможно альтернативное исполнение, при котором индикационная поверхность, то есть поверхность, на которую падает световой пучок, будет выполнена в виде поверхности управления или матовой пластинки, причем индикационная поверхность в этом случае будет отображаться с помощью камеры, которая в случае исполнения с поверхностью управления направлена на сторону поверхности управления, обращенную к направлению падения светового пучка, а при исполнении с матовой пластинкой она направлена на сторону матовой пластинки, отдаленную от направления падения светового пучка.
В принципе предложенный способ предварительной обработки данных измерения с помощью оценки качества отдельных точек измерения применим и в других оптических способах измерения центрирования валов.
Так, например, на фиг. 10 представлен пример способа, при котором первый измерительный модуль 18 содержит как световой источник 20, так и двуосный оптический детектор 25, в то время как второй измерительный модуль 18 содержит систему отражателей 40, которая отражает исходящий от первого измерительного модуля 20 световой луч 22 на индикационную поверхность 25. В этом случае при подборе кривой учитываются также продольная составляющая Y и тангенциальная составляющая Х точки падения светового пучка 22′ на индикационной поверхности 25, причем вновь образуется эллипс.
Обычно система отражателей 40 содержит две расположенные под прямым углом друг к другу отражающие поверхности 42 и 44, которые поочередно отражают луч 22 и направляют его обратно на индикационную поверхность 25; обе поверхности 42 и 44 расположены при этом под углом 45° к вертикали в тангенциальном направлении. Как показано на фиг. 10, исполнение системы отражателей зависит от типа зеркала, или она может быть исполнена в виде призмы, прежде всего в виде призмы Порро или трипель-призмы. Такая система представлена например в заявке DE 3911307 А1.
Еще один альтернативный способ измерения представлен на фиг. 11, где оба измерительных модуля 16 и 18 оснащены световой источник 20 и двуосный оптические детектор 25. Световой источник 20 первого измерительного модуля 16 направлен при этом на детектор 25 второго измерительного модуля 18, а световой источник 20 второго измерительного модуля 18 направлен на детектор 25 первого измерительного модуля 16. Оценка точек измерения осуществляется способом, похожим на принцип измерения согласно фиг. 1-7, то есть продольная составляющая точки падения на одном из двух детекторов наносится над разностью продольных составляющих точек падения на обоих детекторах; нанесенные таким образом точки приводятся затем в соответствие с эллипсом.


Изобретение относится к устройству для определения положения первого вала и второго вала относительно друг друга. Заявленное устройство содержит первый измерительный модуль, установленный на периферийной поверхности первого вала, и второй измерительный модуль, установленный на периферийной поверхности второго вала. Причем как минимум один из двух измерительных модулей оснащен средствами для формирования как минимум одного светового пучка, и как минимум один из двух измерительных модулей оснащен средствами индикации для учета данных о точке падения светового пучка как минимум на одной индикационной поверхности. При этом как минимум один из двух измерительных модулей оснащен датчиком учета угла поворота валов, причем на основании данных датчика вычисляется соответствующее положение угла поворота, угловая скорость и угловое ускорение валов. Кроме того, для каждой отдельной точки падения производится оценка качества соответствующих данных на основании заданных критериев, причем данные точки падения при вычислении смещения вала не учитываются или учитываются в меньшей степени, если в результате оценки качества этих данных получается значение, ниже пороговой величины. 2 н. и 20 з.п. ф-лы, 11 ил.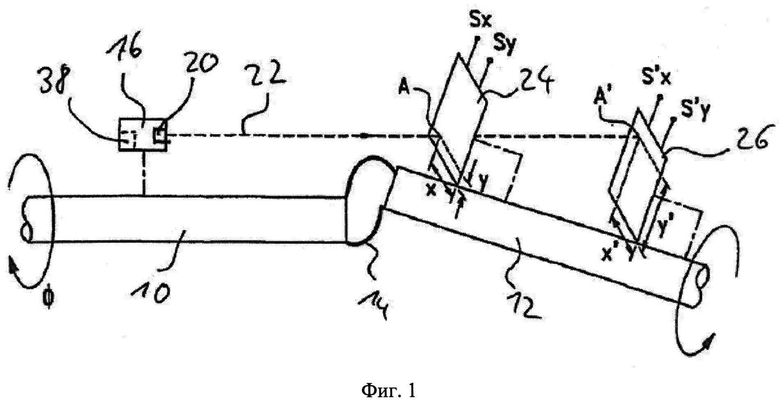
1. Устройство для определения положения первого вала (10) и соединенного с первым валом посредством сочленения (14) второго вала (12) относительно друг друга, содержащее первый измерительный модуль, устанавливаемый на периферийной поверхности первого вала, и второй измерительный модуль, устанавливаемый на периферийной поверхности второго вала, а также блок обработки результатов (30), причем как минимум один из двух измерительных модулей оснащен средствами (20) для формирования как минимум одного светового пучка (22), и как минимум один из двух измерительных модулей оснащен средствами индикации (24, 25, 26) для учета данных о точке падения светового пучка как минимум на одной индикационной поверхности (24, 25, 26), причем как минимум один из двух измерительных модулей оснащен датчиком (28) учета угла поворота валов, представляющим собой двуосный акселерометр или гироскоп, при этом блок обработки результатов выполнен таким образом, что позволяет на основании данных датчиков в нескольких точках измерения вычислить соответствующее положение угла поворота, угловую скорость и угловое ускорение валов, а данные, полученные с помощью средств индикации, позволяют вычислить соответствующую точку падения светового пучка как минимум на одну индикационную поверхность, для того чтобы на основании как минимум одной части вычисленных точек падения вычислить смещение валов с помощью подбора кривой.
2. Устройство по п. 1, отличающееся тем, что как минимум один датчик (28) выполнен таким образом, что возможен учет колебаний по каждой точки измерения, причем в качестве дополнительного критерия для оценки качества данных учитывается интенсивность колебаний, причем повышение интенсивности колебаний ведет к ухудшению результатов оценки.
3. Устройство по п. 1 или 2, отличающееся тем, что блок обработки результатов (30) выполнен таким образом, что при оценке качества данных в качестве дополнительного критерия используется интервал от точки измерения до точки отсчета вращательного движения.
4. Устройство по п. 1, отличающееся тем, что блок обработки результатов (30) выполнен таким образом, что после прохождения определенного количества точек измерения можно проводить общую оценку качества данных по пройденным до данного момента точкам измерения на основании оценки качества отдельных точек измерения, что делается с целью подбора кривой на основании пройденных до данного момента точках измерения и, таким образом, может быть сформулирован результат общей оценки качества.
5. Устройство по п. 4, отличающееся тем, что в отчете о результатах оценки указывают, следует ли закончить измерение или продолжать его в зависимости от того, достиг ли уже полученный результат пороговой величины или еще нет.
6. Устройство по п. 4 или 5, отличающееся тем, что блок обработки результатов (30) выполнен таким образом, что в систему оценки общего качества включены распределение точек измерения по углу поворота и количество точек измерения.
7. Устройство по п. 6, отличающееся тем, что в систему оценки общего качества включено среднее отклонение точек падения от подобранной кривой.
8. Устройство по п. 1, отличающееся тем, что как минимум один из двух измерительных модулей оснащен двумя датчиками акселерометра.
9. Устройство по п. 1, отличающееся тем, что как минимум один из датчиков (30) представляет собой датчик акселерометра, представленный в виде унифицированного блока MEMS.
10. Устройство по п. 1, отличающееся тем, что каждый из двух измерительных модулей (16, 18) оснащен как минимум одним из датчиков (28, 38), причем блок обработки результатов (30) выполнен таким образом, чтобы определять разницу между положением угла поворота, вычисленном посредством первого измерительного модуля и положением угла поворота, вычисленном с помощью данных второго измерительного модуля, что позволяет вычислить зазор сочленения и учесть его при оценке качества отдельных точек измерения и/или при оценке общего качества.
11. Устройство по п. 1, отличающееся тем, что средства индикации представлены как минимум одним двуосным оптическим детектором.
12. Устройство по п. 1, отличающееся тем, что индикационная поверхность представлена поверхностью управления, а средства индикации представлены камерой, которая отображает сторону поверхности управления, обращенную к направлению падения светового пучка.
13. Устройство по п. 1, отличающееся тем, что индикационная поверхность представлена матовой пластинкой, а средства индикации представлены камерой, которая отображает сторону матовой пластинки, обращенную к направлению падения светового пучка.
14. Устройство по п. 1, отличающееся тем, что первый измерительный модуль (16) оснащен средствами (20) для формирования как минимум одного светового пучка (22), а второй измерительный модуль (18) оснащен средствами индикации, причем средства индикации содержат первую индикационную поверхность (24) и вторую индикационную поверхность (26), причем вторая индикационная поверхность визуально смещена в осевом направлении относительно первой индикационной поверхности, и на обе индикационные поверхности одновременно падает как минимум одна часть (22′, 22′′) светового пучка.
15. Устройство по п. 14, отличающееся тем, что первая индикационная поверхность (24) имеет предвключенный разделитель луча, направляющий часть (22′) светового пучка (22) на вторую индикационную поверхность (26).
16. Устройство по п. 14 или 15, отличающееся тем, что при подборе кривой задействуется лишь продольная составляющая соответствующей точки падения на каждой из двух индикационных поверхностей (24, 26).
17. Устройство по п. 16, отличающееся тем, что для подбора кривой задействуются продольная составляющая точки падения на первой индикационной поверхности (24) и разность продольных составляющих точек падения на первой и второй (26) индикационных поверхностях.
18. Устройство по п. 1, отличающееся тем, что первый измерительный модуль (16) оснащен средствами (20) для формирования как минимум одного светового пучка (22) и средствами индикации (25), причем второй измерительный модуль (18) содержит систему отражателей (40), которая обращена к первому измерительному модулю, если измерительные модули расположены на соответствующих валах (10, 12) для отражения светового пучка на индикационную поверхность.
19. Устройство по п. 18, отличающееся тем, что для подбора кривой задействуются продольная составляющая и тангенциальная составляющая точки падения на индикационную поверхность (25).
20. Устройство по п. 18 или 19, отличающееся тем, что система отражателей (40) выполнена в виде призмы Порро или трипель-призмы.
21. Устройство по п. 1, отличающееся тем, что кривая представляет собой эллипс.
22. Способ для определения положения первого вала (10) и соединенного с первым валом посредством сочленения (14) второго вала (12) относительно друг друга, причем первый измерительный модуль (16) установлен на периферийной поверхности первого вала, а второй измерительный модуль (18) установлен на периферийной поверхности второго вала, посредством как минимум одного из двух измерительных модулей формируется как минимум один световой пучок (22) и направляется как минимум на одну индикационную поверхность (24, 25, 26) на одном из двух измерительных модулей, для того чтобы по нескольким измерительным точкам производить учет данных, касающихся точки падения светового пучка на как минимум одну индикационную поверхность, и чтобы посредством как минимум одного датчика (28), который представлен как минимум одним двуосным акселерометром или гироскопом, производить учет данных, касающихся угла поворота валов на как минимум одном из двух измерительных модулей, причем на основании данных датчиков вычисляется соответствующее положение угла поворота, угловая скорость и угловое ускорение валов, а на основании данных по точкам падения вычисляется соответствующая точка падения светового пучка на как минимум одну индикационную поверхность, а на основании как минимум одной части вычисленных точек падения с помощью подбора кривой вычисляется смещение валов.
| Смазка | 1974 |
|
SU504656A1 |
| US 5684578 A1, 04.11.1997 | |||
| US 4864148 A1, 05.09.1989 | |||
| US 4698491 A, 06.10.1987. | |||

