Настоящее изобретение относится к области устройств парирования момента летательных аппаратов с вращающимися несущими поверхностями, предназначенных, в частности, для оснащения комбинированных летательных аппаратов, т.е. летательных аппаратов, содержащих по меньшей мере одну вращающуюся несущую поверхность и по меньшей мере одно неподвижно установленное крыло.
Настоящее изобретение относится к комбинированному летательному аппарату, оснащенному устройством парирования момента. Это устройство парирования момента создает дополнительный вращающий момент, который добавляется к основному вращающемуся моменту, образуемый основным устройством парирования момента, которым оснащен комбинированный летательный аппарат для противодействия вращающему моменту ротора. Этот вращающий момент ротора обусловлен ответным действием несущего винта летательного аппарата крутящему моменту двигателя, используемого для приведения во вращение этого несущего винта. Действительно, этот вращающий момент ротора вращает фюзеляж летательного аппарата, поворачивая относительно вертикальной оси в направлении, противоположном направлению несущего винта. Следовательно, основное устройство парирования момента предназначено для того, чтобы придавать фюзеляжу летательного аппарата поворотное движение относительно вертикальной оси в результате воздействия основного вращающего момента в направлении, аналогичном направлению крутящего момента двигателя.
Летательные аппараты с вращающимися несущими поверхностями представляют собой летательные аппараты, которые принципиально отличаются от других оснащенных двигателями летательных аппаратов их способностью хорошо перемещаться как во время полета на крейсерской скорости на высоких скоростях, так и во время полета на малых скоростях, а также при совершении полета в режиме висения. Такая способность обеспечена за счет использования по меньшей мере одной вращающейся несущей поверхности по существу с вертикальной осью вращения, которой оснащен летательный аппарат. Вращающаяся несущая поверхность расположена сверху фюзеляжа летательного аппарата и обозначается выражением «несущий винт». Этот несущий винт обеспечивает, по меньшей мере, частично аэродинамическую подъемную силу и движение вперед летательного аппарата.
Летательный аппарат с вращающейся несущей поверхностью в целом отличается тремя преобладающими направлениями: продольным направлением X, которое вытянуто от передней части летательного аппарата к задней части летательного аппарата; вертикальным направлением Z, которое вытянуто снизу вверх перпендикулярно продольному направлению X; и поперечным направлением Y, которое вытянуто слева направо перпендикулярно продольному направлению Х и вертикальному направлению Z.
Продольное направление X является продольной осью летательного аппарата, поперечное направление Y - его поперечной осью, а вертикальное направление Z - его вертикальной осью. Ось вращения несущего винта по существу близка вертикальной оси летательного аппарата.
Несущий винт содержит множество лопастей и приводится во вращение силовой установкой летательного аппарата посредством основной системы передачи мощности. Для обеспечения его уравновешенного состояния вокруг вертикальной оси летательный аппарат оснащен основным устройством парирования момента, создающим основной вращающий момент вокруг вертикальной оси. Этот основной вращающий момент позволяет, с одной стороны, противодействовать и удерживать в состоянии равновесия вращающий момент ротора, а с другой стороны, обеспечивать способность к маневрированию летательного аппарата вокруг его вертикальной оси, в частности, при полете в режиме висения или на особых этапах полета.
Существуют различные конструкции основных устройств парирования момента для летательных аппаратов с вращающимися несущими поверхностями.
Например, основное устройство парирования момента представлено вспомогательным ротором, расположенным, как правило, в задней части летательного аппарата, на конце хвостовой балки летательного аппарата. Этот вспомогательный ротор может быть неподвижным или вращающимся и приводиться во вращение силовой установкой летательного аппарата посредством вспомогательной системы передачи мощности. Основное устройство парирования момента также может представлять собой воздушную струю, направленную главным образом в поперечном направлении Y и расположенную, как правило, на оконечной части хвостовой балки летательного аппарата. Согласно данным двум примерам, основное устройство парирования момента создает усилие в поперечном направлении на уровне хвостовой балки летательного аппарата, создавая затем основной вращающий момент вокруг вертикальной оси.
Согласно другому примеру, основное устройство парирования момента образовано двумя винтами, расположенными в поперечном направлении с одной и другой стороны фюзеляжа летательного аппарата. Эти два винта приводятся во вращение силовой установкой летательного аппарата посредством вспомогательной системы передачи мощности и образуют усилия в продольном направлении. Эти два винта обеспечивают также, частично или в полном объеме, движение вперед летательного аппарата в зависимости от этапа полета летательного аппарата. Разница между продольными усилиями, образованными, соответственно, каждым винтом, позволяет образовывать основной вращающий момент вокруг вертикальной оси.
Независимо от того, какое основное устройство парирования момента используется, необходимо обеспечить механической силой это основное устройство парирования момента для создания необходимого основного вращающего момента. Эта механическая сила, приводящая в действие устройство парирования момента, добавляется к механической силе, необходимой для приведения в движение несущего винта. Силовая установка летательного аппарата должна, таким образом, обеспечить механическую силу, достаточную для приведения в движение одновременно и несущего винта, и основного устройства парирования момента.
Кроме того, механическая сила, необходимая как на уровне несущего винта, так и основного устройства парирования момента, меняется в зависимости от этапа полета. Этапы взлета и полета в режиме висения, как правило, являются этапами, требующими самых больших усилий, что касается механической силы.
Кроме того, летательный аппарат с вращающейся несущей поверхностью может содержать по меньшей мере одно неподвижно установленное крыло, обеспечивающее, частично или в полном объеме, аэродинамическую подъемную силу летательного аппарата во время полета на большой скорости. Неподвижно установленное крыло, например, расположено в поперечном направлении с одной и другой стороны фюзеляжа летательного аппарата под несущим винтом и обозначается в последующем термином «крыло». Такой летательный аппарат с вращающейся несущей поверхностью, оснащенный двумя крыльями, расположенными, соответственно, с одной и другой стороны фюзеляжа летательного аппарата, часто обозначается выражением «комбинированный летательный аппарат».
Согласно данному типу конструкции, крылья летательного аппарата испытывают воздействие аэродинамических факторов несущего винта. В частности, при полете в режиме висения или во время взлета, когда оно оказывается полностью погруженным в воздушный поток, образуемый как ответное действие аэродинамической подъемной силе несущего винта, каждое крыло испытывает воздействие аэродинамического лобового сопротивления, направленного вниз, которое образует отрицательную аэродинамическую подъемную силу, называемую «отрицательной подъемной силой». Эта отрицательная подъемная сила частично противодействует аэродинамической подъемной силе, создаваемой несущим винтом, и должна быть компенсирована увеличением аэродинамической подъемной силы несущего винта, равной и направленной в противоположном направлении этой отрицательной подъемной силе. Для увеличения аэродинамической подъемной силы несущего винта механическая сила, обеспечиваемая силовой установкой летательного аппарата, должна быть, таким образом, увеличена в равной степени.
Видно, что механическая сила, необходимая для обеспечения полета летательного аппарата с вращающейся несущей поверхностью в режиме висения или также при его взлете и без того большая, оказывается повышенной для комбинированного летательного аппарата. Кроме того, отмечается, что эта механическая сила, необходимая при полете в режиме висения или при взлете, не ограничивается потребной тягой несущего винта для удерживания в равновесии веса летательного аппарата, но и в два раза больше, с одной стороны, для приведения в действие основного устройства парирования момента, а с другой стороны, для компенсирования отрицательной подъемной силы каждого крыла, обдуваемого воздушным потоком, образуемым как ответное действие аэродинамической подъемной силе несущего винта комбинированного летательного аппарата.
В целях упрощения, в описании в дальнейшем будет использоваться выражение «воздушный поток несущего винта» для обозначения воздушного потока, образуемого как ответное действие аэродинамической подъемной силе несущего винта.
Следовательно, механическая сила, обеспечиваемая для осуществления полета в режиме висения, а также для взлета, часто представляет собой параметр, рассчитываемый для силовой установки летательного аппарата и носящий ограничительный характер для его общих летно-технических характеристик. Действительно, уменьшение этой механической силы, необходимой для осуществления полета в режиме висения или также для взлета, может быть важным источником улучшения общих летно-технических характеристик летательного аппарата. Известно, в частности, что уменьшение мощности, необходимой при полете в режиме висения, на 1,5% для расчетного лимита мощности на валу позволяет увеличить общую взлетную массу по существу на 1% и, как следствие, грузоподъемность летательного аппарата, которая повышается приблизительно на 2%-3% для постоянной массы пустого летательного аппарата.
Прежде всего, представляется возможным уменьшить потребность по мощности, необходимой для обеспечения функции парирования момента.
Первое средство заключается в применении для обеспечения аэродинамической подъемной силы летательного аппарата двух несущих винтов, вращающихся в противоположных направлениях, вращающиеся моменты которых приводятся в уравновешенное состояние. Таким образом, на летательном аппарате не требуется никакого устройства парирования момента. Два несущих винта могут быть расположены на летательном аппарате в поперечном направлении, в продольном направлении или также соосно.
И наоборот, использование двух несущих винтов, расположенных в поперечном направлении или в продольном направлении, требует соединения двух несущих винтов посредством передаточных валов мощности для синхронизации их движений в любых условиях обстановки. Этот тип конструкции чаще всего предусмотрен для летательных аппаратов большой грузоподъемности, но не применим для летательных аппаратов средней или малой грузоподъемности.
Использование двух соосных несущих винтов, хорошо адаптированных к любому типу летательных аппаратов, очень сложно с механической точки зрения в связи с использованием, в частности, двух концентрических валов вращения, а также двух систем управления шагом лопастей этих несущих винтов. Кроме того, лопасти двух несущих винтов никогда не должны противодействовать друг другу независимо от того, какими являются вертикальные движения деформации или вращения, которые на них воздействуют, что выдвигает дополнительные требования по установке и/или по прочности этих несущих винтов.
Второе средство заключается в приведении во вращение единственного несущего винта не механической системой передачи мощности, но путем размещения движителей воздуха, расположенных на каждой из лопастей. Таким образом, несущий винт свободно вращается на своей оси без какого-либо вращающего момента или также с очень небольшим вращающим моментом, связанным исключительно с трением вала несущего винта на подшипниках. Небольшой дополнительный вращающий момент вместе с тем может быть образован путем приведения в действие необходимого вспомогательного оборудования, такого как, например, гидравлические насосы или дополнительные электрогенераторы. Таким образом, достаточно основного устройства парирования момента, образующего небольшой вращающий момент по вертикальной оси для удерживания в равновесии остаточного вращающего момента несущего винта и обеспечения маневренности относительно вертикальной оси летательного аппарата в любых условиях полета.
Однако движение вперед в случае большой скорости воздуха реализуется с небольшим коэффициентом полезного действия. Следовательно, несмотря на необходимость основного устройства парирования момента, образующего небольшой вращающий момент, потребная тяга силовой установки летательного аппарата существенно увеличена для компенсации этого небольшого коэффициента полезного действия. С другой стороны, очень сильный шум, образуемый в результате этого движения вперед воздуха с большой скоростью, представляет собой серьезный недостаток этой конструкции.
Третье средство заключается в придании хвостовой балке летательного аппарата асимметричной формы, которая образует поперечную аэродинамическую силу, когда она обдувается окружающим ее воздушным потоком, в частности воздушным потоком несущего винта. Эта поперечная аэродинамическая сила позволяет создавать вращающий момент по вертикальной оси, частично противодействующий вращающему моменту ротора.
И наоборот, эта асимметричная форма не является достаточной для удерживания полностью в равновесии вращающего момента ротора, но позволяет уменьшить механическую силу, необходимую основному устройству парирования момента. Основное устройство парирования момента, таким образом, всегда необходимо, в частности на малой скорости. Эта асимметричная форма может быть заменена обдувкой воздухом одной из сторон этой хвостовой балки.
Для комбинированных летательных аппаратов представляется также возможным уменьшить известным образом отрицательную подъемную силу крыльев. С этой целью каждое крыло летательного аппарата снабжено подвижными закрылками, например, на его задней кромке. Подвижные закрылки позволяют регулировать аэродинамическую подъемную силу каждой совокупности, образованной крылом и закрылком или закрылками, которые оно содержит.
В нижеследующем описании под выражением «совокупность крыла и закрылка» будет обозначаться совокупность, образованная крылом и закрылком или закрылками, которые она содержит для каждой стороны продольного направления X. Совокупность крыла и закрылка расположена, таким образом, с первой стороны фюзеляжа комбинированного летательного аппарата в продольном направлении X, а другая совокупность крыла и закрылка расположена со второй стороны фюзеляжа в этом продольном направлении X.
Когда летательный аппарат совершает полет на крейсерской скорости и полет на большой скорости, каждый подвижный закрылок, как правило, является продолжением профиля крыла с небольшим или нулевым углом отклонения, оптимизируя, таким образом, аэродинамическую подъемную силу крыла и сводя к минимуму его паразитное аэродинамическое лобовое сопротивление.
Кроме того, асимметричное перемещение закрылков с одной и другой стороны фюзеляжа позволяет осуществлять управление летательным аппаратом по крену. Действительно, аэродинамические нагрузки аэродинамической подъемной силы совокупности крыла и закрылка, таким образом, различны с одной и другой стороны фюзеляжа и приводят, помимо всего прочего, к перемещению летательного аппарата вокруг его продольной оси.
На малой скорости, и в частности во время полета в режиме висения и при взлете, закрылки могут быть ориентированы вниз, образуя угол, составляющий почти девяносто (90°) градусов с крылом, для вывода за пределы воздушного потока несущего винта заднюю часть совокупности крыла и закрылка, занятой закрылками. Закрылки также могут быть выдвижными и заходить внутрь крыла. Поверхность каждой совокупности крыла и закрылка, подвергающаяся воздействию воздушного потока несущего винта, оказывается, таким образом, уменьшенной, снижая отрицательную подъемную силу, обусловленную совокупностью крыла и закрылка. Следовательно, мощность, необходимая на уровне несущего винта, уменьшена благодаря наличию подвижных закрылков, как и потребная тяга силовой установки летательного аппарата. Перемещение подвижных закрылков может управляться пилотом летательного аппарата или, возможно, автопилотом, которым оснащен этот летательный аппарат.
Однако отрицательная подъемная сила всегда создается воздушным потоком несущего винта на каждой совокупности крыла и закрылка. Действительно, размер закрылков ограничен ограничениями по габаритам, прочности и дополнительной массе. Следовательно, мощность, необходимая на уровне несущего винта, а также мощность на уровне основного устройства парирования момента вместе с тем увеличены по сравнению с аналогичным летательным аппаратом, не содержащим крыла.
Таким образом, представляется интересным предложить средство, позволяющее уменьшить механическую силу, необходимую для основного устройства парирования момента, в целях уменьшения механической силы, необходимой для силовой установки летательного аппарата с вращающейся несущей поверхностью.
Известны, например, документы US 2575886, US 2008/0272244, US 4928907 и GB 570455, в которых приводится описание летательного аппарата, содержащего несущий винт для аэродинамической подъемной силы, два крыла, расположенные с одной и другой стороны фюзеляжа и, возможно, один или два толкающих воздушных винта. Ни в одном из этих документов не приводится описание летательного аппарата, оснащенного хвостовым винтом парирования момента. Действительно, устройство парирования момента этих летательных аппаратов использует воздушный поток несущего винта для создания аэродинамической подъемной силы, который обдувает аэродинамические конструктивные элементы для образования аэродинамических сил и, следовательно, вращающего момента, противодействующего вращающему моменту ротора.
Таким образом, согласно документу US 2575886, летательный аппарат содержит множество поворотных закрылков на каждом крыле и на фюзеляже. Согласно документам US 2008/0272244, US 4928907 и GB 570455, совокупность крыльев является управляемой, а каждое крыло содержит по меньшей мере один закрылок, поворотный относительно крыла. Ориентированность закрылков и/или крыльев позволяет, таким образом, в результате обдувания воздушным потоком несущего винта, создающего аэродинамическую подъемную силу, образовывать эти аэродинамические силы и, следовательно, вращающий момент, противодействующий вращающему моменту несущего винта. Эти закрылки и/или эти крылья могут быть идентичными с одной и другой стороны фюзеляжа.
Кроме того, документы US 2006/0157614, JP 2003/220999 и US 2005/0151001 представляют часть предшествующего технологического уровня техники по изобретению.
Таким образом, задачей настоящего изобретения является разработка комбинированного летательного аппарата с вращающейся несущей поверхностью, содержащего устройство парирования момента, позволяющее уменьшить механическую силу, необходимую для основного устройства парирования момента, и, следовательно, уменьшить механическую силу, требуемую силовой установке комбинированного летательного аппарата.
Согласно изобретению, комбинированный летательный аппарат определен продольным направлением X, вытянутым от передней части летательного аппарата к задней части летательного аппарата, вертикальным направлением Z, вытянутым снизу вверх перпендикулярно продольному направлению X и поперечным направлением Y, вытянутым слева направо перпендикулярно продольному направлению X и вертикальному направлению Z.
Этот комбинированный летательный аппарат содержит:
- фюзеляж;
- несущий винт, расположенный сверху фюзеляжа, содержащий множество лопастей и приводимый во вращение вокруг оси, по существу параллельной вертикальному направлению Z;
- основное устройство парирования момента, создающее основной вращающий момент, противодействующий вращающему моменту ротора, образующемуся в результате вращения несущего винта;
- по меньшей мере одно крыло, расположенное ниже несущего винта и вытянутое по существу в поперечном направлении Y, и
- по меньшей мере два закрылка, расположенных ниже несущего винта; причем по меньшей мере один закрылок расположен на первой стороне фюзеляжа согласно продольному направлению X и по меньшей мере один закрылок расположен на второй стороне фюзеляжа; причем каждый закрылок вытянут по существу в поперечном направлении Y; причем каждый закрылок соединен с крылом и подвижен по отношению к этому крылу.
Согласно изобретению, каждый закрылок соединен или с общим аэродинамическим крылом, или с отдельным аэродинамическим крылом.
С каждой стороны фюзеляжа комбинированного летательного аппарата каждое крыло, таким образом, образует с закрылком или закрылками, которые с ним соединены, совокупность крыла и закрылка.
Под термином «общее аэродинамическое крыло» понимается крыло, расположенное с одной и другой стороны продольного направления X и находящееся под фюзеляжем летательного аппарата или также сверху этого фюзеляжа.
Под термином «отдельное аэродинамическое крыло» понимается крыло, прикрепленное к фюзеляжу летательного аппарата и вытянутое только с одной стороны продольного направления X. Летательный аппарат содержит, таким образом, по меньшей мере два крыла; причем по меньшей мере первое крыло расположено на первой стороне продольного направления X, а по меньшей мере второе крыло расположено на второй стороне фюзеляжа.
Предпочтительно каждый закрылок размещен на уровне задней кромки крыла.
Перемещение каждого закрылка управляется исполнительным устройством, таким как силовой цилиндр или даже двигатель. Это исполнительное устройство может воздействовать на закрылок непосредственно или также опосредованно, например, посредством системы тяг и рычагов. Кроме того, вычислительное устройство управляет каждым исполнительным устройством для осуществления управления перемещением закрылка.
Этот комбинированный летательный аппарат примечателен тем, что совокупность крыла и закрылка, расположенная на первой стороне фюзеляжа, и совокупность крыла и закрылка, расположенная на второй стороне фюзеляжа, обладают различными коэффициентами продольной аэродинамической силы CT и предпочтительно противоположными знаками, когда они подвергаются воздействию в основном воздушного потока несущего винта. Этот воздушный поток несущего винта создает, таким образом, продольные аэродинамические силы предпочтительно противоположной направленности, на этих совокупностях крыла и закрылка с одной и другой стороны фюзеляжа, и, следовательно, дополнительный вращающий момент добавляется к основному вращающему моменту.
При полетах, во время которых осуществляется движение вперед комбинированного летательного аппарата, совокупности крыла и закрылка подвергаются воздействию воздушного потока, в основном ориентированного в продольном направлении от передней части к задней части летательного аппарата, и образованы путем движения вперед летательного аппарата. Совокупности крыла и закрылка, расположенные ниже несущего винта, также подвергаются воздействию воздушного потока, в основном направленного вниз и образованного как ответное действие аэродинамической подъемной силе несущего винта. На этапах полета в режиме висения и при взлете, а также во время полетов на малой скорости, совокупности крыла и закрылка, таким образом, подвержены в основном и даже исключительно воздействию этого воздушного потока несущего винта. Кроме того, каждая совокупность крыла и закрылка имеет аэродинамический профиль, образующий вертикальную и продольную аэродинамические силы, когда совокупности крыла и закрылка подвержены воздействию этого воздушного потока; причем этот воздушный поток будет образован в результате движения вперед летательного аппарата или также как ответное действие аэродинамической подъемной силе несущего винта. Эти вертикальная и продольная аэродинамические силы, образованные на каждой совокупности крыла и закрылка, зависят соответственно от коэффициента вертикальной аэродинамической силы CN и коэффициента продольной аэродинамической силы CT каждой совокупности крыла и закрылка.
Правила знака коэффициентов вертикальной CN и продольной CT аэродинамической сил определены системой отсчета, образованной продольным Х, поперечным Y и вертикальным Z направлениями.
Коэффициент продольной аэродинамической силы CT совокупности крыла и закрылка ориентирован в продольном направлении X и является, таким образом, положительным от передней кромки крыла к задней кромке, т.е. от передней части летательного аппарата к задней части летательного аппарата.
Коэффициент вертикальной аэродинамической силы CN совокупности крыла и закрылка ориентирован в вертикальном направлении Z и, таким образом, является положительным снизу вверх и отрицательным сверху вниз.
Предпочтительно коэффициенты продольных аэродинамических сил CT каждой совокупности крыла и закрылка, таким образом, являются, согласно изобретению, различными и благоприятным образом с противоположными направлениями с одной и другой стороны фюзеляжа. Действительно, главным результатом изобретения является создание продольных аэродинамических сил, образованных воздушным потоком несущего винта, воздействующего на эти совокупности крыла и закрылка; причем эти продольные аэродинамические силы существенным образом различны и благоприятным образом с противоположными направлениями с одной и другой стороны фюзеляжа.
Таким образом, с первой стороны фюзеляжа летательного аппарата первая продольная аэродинамическая сила, образованная на каждой совокупности крыла и закрылка, предпочтительно направлена к задней части летательного аппарата, а со второй стороны фюзеляжа вторая продольная аэродинамическая сила, образованная на каждой совокупности крыла и закрылка, направлена предпочтительно к передней части летательного аппарата. Первая сторона фюзеляжа, для которой первая продольная аэродинамическая сила направлена к задней части летательного аппарата, определена согласно направлению вращения несущего винта летательного аппарата для того, чтобы дополнительный вращающий момент, образованный в результате асимметрии между первой и второй продольными аэродинамическими силами, был ориентирован в том же направлении, что и вращающий момент несущего винта, и противодействовал, таким образом, вращающему моменту ротора.
Следовательно, дополнительный вращающий момент вокруг оси, параллельной вертикальному направлению Z, добавляется к основному вращающему моменту для противодействия вращающему моменту ротора, образованному в результате вращения несущего винта летательного аппарата.
Совокупности крыла и закрылка, а также несущий винт посредством воздушного потока несущего винта образуют, таким образом, устройство парирования момента, участвующее, как дополнение к основному устройству парирования момента, в уравновешивании вращающего момента ротора летательного аппарата.
Таким образом, основной вращающий момент, который обеспечивается основным устройством парирования момента летательного аппарата, может быть уменьшен. Кроме того, этот дополнительный вращающий момент возник на основе воздушного потока несущего винта и образуется, таким образом, без обеспечения дополнительной механической силы на уровне этого несущего винта. Механическая сила, необходимая на уровне этого основного устройства парирования момента, таким образом, уменьшена, и, следовательно, необходимость в механической силе на уровне силовой установки летательного аппарата также уменьшена.
Предпочтительно эти продольные аэродинамические силы имеют противоположные направления и обладают равной интенсивностью с одной и другой стороны фюзеляжа летательного аппарата для образования этого дополнительного вращающего момента без появления паразитной силы, способной нарушить уравновешенное состояние летательного аппарата.
Однако интенсивность этих продольных аэродинамических сил может быть различной с одной и другой стороны фюзеляжа летательного аппарата. Продольная паразитная сила, соответствующая разнице между интенсивностью этих продольных аэродинамических сил, появляется, таким образом, с одной стороны летательного аппарата; причем эта продольная паразитная сила может быть направлена к передней части или к задней части летательного аппарата. Эта продольная паразитная сила, таким образом, должна быть компенсирована дополнительной продольной аэродинамической силой, образованной в результате продольного поворота плоскости вращения лопастей несущего винта, для сохранения полета в режиме стабильного висения летательного аппарата без того, чтобы это представляло существенный недостаток для применения изобретения.
Аналогичным образом, эти продольные аэродинамические силы могут иметь такое же направление, причем их интенсивность является различной. Дополнительный вращающий момент, таким образом, образуется разницей между интенсивностью этих продольных аэродинамических сил и продольной паразитной силой, появляющейся с одной и другой стороны фюзеляжа.
Кроме того, закрылки могут быть ориентированы различным образом относительно воздушного потока несущего винта с одной и другой стороны фюзеляжа для того, чтобы коэффициенты продольных аэродинамических сил CT совокупностей крыла и закрылка были различными с одной и другой стороны фюзеляжа.
Согласно первому способу практического осуществления изобретения, комбинированный летательный аппарат содержит по меньшей мере два отдельных крыла, размещенных соответственно с одной и другой стороны фюзеляжа относительно продольного направления X и вытянутых по существу согласно поперечному направлению Y. Крылья неподвижно установлены относительно фюзеляжа летательного аппарата и размещены под несущим винтом.
Согласно второму способу практического осуществления изобретения, комбинированный летательный аппарат содержит только одно общее крыло, расположенное с одной и другой стороны фюзеляжа относительно продольного направления X и вытянутое по существу согласно поперечному направлению Y. Это общее крыло неподвижно установлено относительно летательного аппарата и размещено под несущим винтом.
Общим для этих двух способов практического осуществления изобретения является то, что закрылки подвижны относительно крыльев; причем перемещение закрылков определено углом отклонения. Аэродинамические профили крыльев идентичны с одной и другой стороны фюзеляжа так же, как и аэродинамические профили закрылков.
Известно, что закрылки могут быть отклонены относительно крыльев, изменяя, таким образом, коэффициенты продольных CT и вертикальных CN аэродинамических сил и совокупности крыла и закрылка. Также во время полета на крейсерской скорости каждый закрылок, как правило, расположен как продолжение крыла по существу с нулевым углом отклонения.
На малой скорости и, в частности, во время полета в режиме висения или на этапе взлета закрылки могут быть расположены вниз с углом отклонения, почти равным девяноста (90°) градусам, для того чтобы уменьшить отрицательную подъемную силу каждой совокупности крыла и закрылка.
Согласно изобретению, на этапах полета в режиме висения и взлета асимметричные углы отклонения закрылков с одной и другой стороны фюзеляжа позволяют образовывать на совокупностях крыла и закрылка с одной и другой стороны фюзеляжа различные, с благоприятными противоположными направлениями продольные аэродинамические силы. Следовательно, дополнительный вращающий момент, который добавляется к основному вращающему моменту, образован этими продольными аэродинамическими силами. Углы отклонения закрылков различны с одной и другой стороны фюзеляжа, но составляют почти 90° для того, чтобы, с одной стороны, максимально уменьшить отрицательную подъемную силу каждой совокупности крыла и закрылка, а с другой стороны, образовывать этот дополнительный вращающий момент.
Предпочтительно этот дополнительный вращающий момент, частично участвующий в удержании в равновесии вращающего момента ротора, обеспечивается, таким образом, без оказания негативного влияния на совокупности крыла и закрылка, в частности на их функции уменьшения отрицательной подъемной силы, и ни приводя при этом к повышению показателя сложности, увеличению массы или стоимости летательного аппарата; причем закрылки и их механизмы перемещения остаются неизменными. Следовательно, силовая установка летательного аппарата, таким образом, может быть оптимизирована с учетом этого дополнительного вращающего момента.
Таким образом, следует отметить, что эффективность устройства парирования момента и уменьшения отрицательной подъемной силы совокупностей крыла и закрылка непосредственно связана с поверхностью закрылков. Например, закрылки, длины хорд которых меньше 20% длины хорды крыла, приводят лишь к небольшому уменьшению этой отрицательной подъемной силы и основного вращающего момента, не подтверждая оправданность наличия закрылков и механизмов их перемещения. И наоборот, закрылки, обладающие очень большим размером, безусловно, очень эффективны как для образования дополнительного вращающего момента, так и для уменьшения этой отрицательной подъемной силы. Однако, напряжения, связанные с их габаритными размерами, механизмами, необходимыми для их перемещений, и возникающими нагрузками, делают их в целом малоинтересными по сравнению с другими устройствами, такими как, например, полностью поворачивающееся крыло.
Следовательно, для достижения представляющего интерес компромиссного решения между эффективностью закрылков и их напряжениями, обусловленными установкой, длина хорды каждого закрылка составляет от 20% до 35% длины хорды крыльев.
Кроме того, для максимального уменьшения отрицательной подъемной силы совокупностей крыла и закрылка плоскость, покрытая закрылками в направлении размаха крыла, т.е. в поперечном направлении Y, должна быть максимальной. Например, закрылки вытянуты от стенки фюзеляжа до края крыла или до внешней границы воздушного потока несущего винта, если он не покрывает полностью поверхность крыла.
Кроме того, для поверхностей определенных крыльев и закрылков для оптимизации эффективности устройства парирования момента плечи асимметричных продольных аэродинамических сил должны быть максимальными. С этой целью закрылки должны быть максимально возможно удалены от фюзеляжа летательного аппарата.
Однако, если по меньшей мере один толкающий воздушный винт расположен на крыле, то по существу продольный воздушный поток каждого толкающего воздушного винта направлен на часть крыла. В этом случае закрылки должны быть расположены на каждом крыле вне зоны, которая подвержена воздействию этого по существу продольного воздушного потока толкающего воздушного винта. Действительно, отклонение закрылка, находящегося в такой зоне крыла, обдуваемого воздушным потоком толкающего воздушного винта, образует другое продольное усилие, направленное к задней части летательного аппарата, противодействуя, таким образом, усилию продвижения вперед, создаваемого толкающим воздушным винтом, и уменьшая свою эффективность. Кроме того, это другое продольное усилие уменьшает также эффективность основного устройства парирования момента, что может образовать толкающий воздушный винт или толкающие воздушные винты. Когда летательный аппарат совершает полет в режиме висения или на очень малых скоростях, представляется также возможным отклонять закрылки, находящиеся в зоне, подвергаемой воздействию воздушного потока каждого толкающего воздушного винта и это, если множество закрылков расположено с одной стороны на крыле, размещенном на первой стороне фюзеляж летательного аппарата, с другой стороны на крыле, расположенном на второй стороне фюзеляжа.
Предпочтительно летательный аппарат содержит в этом случае толкающий воздушный винт, расположенный на каждом крыле; причем толкающие воздушные винты представляют собой основное устройство парирования момента комбинированного летательного аппарата.
Во время полета в режиме висения, взлета или же полета на очень малых скоростях, когда угол отклонения закрылков является небольшим и направленным вниз согласно вертикальному направлению Z, интенсивность отрицательной подъемной силы каждой совокупности крыла и закрылка является большой вследствие, с одной стороны, взлета, образованного распространяющимся движением воздуха на всю площадь нижней поверхности совокупности крыла и закрылка, создавая на этой поверхности пониженное давление, а с другой стороны, повышенное давление, создаваемое на всей площади верхней поверхности этой совокупности крыла и закрылка.
И наоборот, продольная аэродинамическая сила, образованная на каждой совокупности крыла и закрылка, является небольшой и направленной к передней кромке крыла, т.е. к передней части летательного аппарат, являясь по существу нулевой. Эта продольная аэродинамическая сила пропорциональна коэффициенту продольной аэродинамической силы CT и, таким образом, является отрицательной, в соответствии с правилами сигналов, определенной ранее и сопоставимой с коэффициентами вертикальной CN и продольной СТ аэродинамических сил.
Когда угол отклонения закрылков постепенно увеличивается книзу в вертикальном направлении Z, интенсивность отрицательной подъемной силы каждой совокупности крыла и закрылка уменьшается, в то время как интенсивность продольной аэродинамической силы, образованной на каждой совокупности крыла и закрылка, увеличивается; причем эта образованная продольная аэродинамическая сила является отрицательной и направленной к передней кромке крыла.
Продольная аэродинамическая сила в последующем достигает максимального значения интенсивности; причем эта продольная аэродинамическая сила всегда является отрицательной и направленной к передней кромке крыла, затем ее интенсивность уменьшается, в то время как угол отклонения закрылков продолжает увеличиваться.
Когда угол отклонения сильно увеличился и приблизился или даже немного превысил угол 90°, интенсивность отрицательной подъемной силы равна минимальному значению или очень близка к этому минимальному значению. Далее, эта интенсивность отрицательной подъемной силы практически больше не меняется, даже если угол отклонения закрылков продолжает увеличиваться.
И наоборот, интенсивность продольной аэродинамической силы на каждой совокупности крыла и закрылка уменьшается, когда угол отклонения закрылков продолжает увеличиваться до достижения нулевого значения для угла отклонения реверсирования δi. За пределами этого угла отклонения реверсирования δ1 интенсивность продольной аэродинамической силы на каждой совокупности крыла и закрылка быстро увеличивается, в то время как направление этой продольной аэродинамической силы является реверсивным и ориентированным к задней кромке крыла, т.е. к задней части летательного аппарата, когда угол отклонения продолжает увеличиваться: продольная аэродинамическая сила, таким образом, быстро меняется и является положительной в этой зоне.
Затем при превышении угла отклонения срыва δD, который, как правило, составляет почти 90°, движение воздушного потока резко отрывается от поверхности закрылка, и интенсивность продольной аэродинамической силы резко падает и составляет, таким образом, почти ноль. Интенсивность продольной аэродинамической силы, таким образом, более не меняется, если угол отклонения продолжает увеличиваться за пределы этого угла отклонения срыва δD. Речь идет о явлении срыва потока с закрылка. Значение угла отклонения срыва δD зависит от формы аэродинамического профиля совокупности крыла и закрылка, а также от соединения закрылка с крылом, и может быть меньше, равно или же больше 90°.
Основной принцип изобретения заключается, таким образом, в применении асимметричного угла отклонения закрылков с одной и другой стороны фюзеляжа. Первый угол отклонения δ1 каждого закрылка на первой стороне фюзеляжа максимально возможно равен углу отклонения срыва δD, не достигая его значения, и, таким образом, больше угла отклонения реверсирования δi. Второй угол отклонения δ2 каждого закрылка второй стороны фюзеляжа меньше угла отклонения реверсирования δi. Этот второй угол отклонения δ2 является, например, асимметричным относительно угла отклонения реверсирования δi первого угла отклонения δ1.
Устройство парирования момента позволяет, таким образом, применять первый угол отклонения δ1, для которого изменение коэффициента продольной аэродинамической силы CT совокупности крыла и закрылка является быстрым и для которого интенсивность отрицательной подъемной силы близка минимальному значению. Первая продольная аэродинамическая сила проявляется на каждой совокупности крыла и закрылка, расположенной на этой первой стороне фюзеляжа, и является, таким образом, положительной и направленной к задней кромке крыла, т.е. к задней части летательного аппарата. Вторая продольная аэродинамическая сила появляется на каждой совокупности крыла и закрылка, расположенной на этой второй стороне фюзеляжа, является, таким образом, отрицательной и направленной к передней кромке крыла, т.е. к передней части летательного аппарата.
Таким образом, первый и второй углы отклонения δ1, δ2 с одной и другой стороны фюзеляжа можно определить следующим образом:
Δδ1 Δδ1
где δm - среднее арифметическое углов отклонения с одной и другой стороны фюзеляжа;
Δδ1 - разница этих углов отклонения. Разница углов отклонения Δδ1 составляет, например, от 10° до 15°.
Первая сторона фюзеляжа, для которой первый угол отклонения δ1 каждого закрылка почти равен углу отклонения срыва δD, определена согласно направлению вращения несущего винта летательного аппарата для того, чтобы дополнительный вращающий момент, образованный посредством этих продольных аэродинамических сил, противопоставлялся вращающему моменту ротора. Кроме того, для получения максимального дополнительного вращающего момента определяется реализуемый максимальный угол отклонения с этой первой стороны фюзеляжа, где должна быть создана первая продольная аэродинамическая сила, направленная к задней части летательного аппарата, сохраняя при этом запас надежности Δδ0 по отношению к углу срыва δD. Этот запас надежности Δδ0, который не равен нулю, позволяет не допустить, чтобы первая продольная аэродинамическая сила была нулевой или очень небольшой и, следовательно, чтобы не был образован никакой значительный дополнительный вращающий момент.
Этот запас надежности Δδ0 составляет, например, от 2° до 5°. Таким образом, можно определить первый и второй углы отклонения на одной и другой стороне фюзеляжа, в том числе
 и
и 
Кроме того, для того чтобы не допустить, чтобы угол отклонения закрылка достиг значения этого угла отклонения срыва δD, первый механический упор может быть установлен на первой стороне фюзеляжа для ограничения перемещения закрылков. Угловое отклонение между углом отклонения срыва δD и первым механическим упором, например, равно запасу надежности Δδ0. Аналогично, второй механический упор также может быть установлен на второй стороне фюзеляжа. Угловое отклонение между углами отклонения закрылков, соответствующее первому и второму механическим упорам, например, равно разнице углов отклонения Δδ1. Таким образом, когда закрылки с двух сторон фюзеляжа отклонены до их соответствующих упоров, надежным и безопасным образом осуществляется желаемое смещение отклонения для обеспечения дополнительного вращающего момента, причем этот дополнительный вращающий момент предпочтительно является максимальным.
На эффективность дополнительного устройства парирования момента, помимо габаритных размеров и места установки закрылков, оказывает влияние, в частности, форма соединения между крылом и закрылком. Действительно, зона всасывания воздуха может возникнуть на выпуклой части каждого закрылка на уровне этого соединения с крылом, рядом с высокими углами отклонения. С этой целью радиус кривизны этой выпуклой части закрылка должен быть как можно больше, а аэродинамическое продолжение с неподвижной частью крыла должно быть как можно лучше, без образования трещин на его поверхности, без чрезмерных зазоров, без утечек воздуха между верхней поверхностью и нижней поверхностью закрылка. Вместе с тем закрылок не должен повредить характеристики профиля крыла при небольших углах атаки, когда закрылок не отклонен или же отклонен на небольшой угол, когда он находится во время полета на большой скорости.
Кроме того, большой радиус кривизны этой выпуклой части закрылка позволяет предпочтительно увеличить величину угла отклонения срыва δD совокупности крыла и закрылка, подверженных воздействию воздушного потока несущего винта, и увеличить, таким образом, запас надежности Δδ0. Следовательно, разница углов отклонения Δδ1 может быть больше, позволяя увеличивать интенсивность положительной продольной аэродинамической силы и, следовательно, дополнительный вращающий момент.
Если, например, каждый закрылок обладает простым по отношению к крылу поворотным движением, то представляется возможным обеспечить большой радиус кривизны этой выпуклой части закрылков, удаляя центр вращения закрылка относительно верхней поверхности крыла и верхней поверхности закрылка. Этот центр вращения, например, расположен внутри крыла и близко к нижней поверхности крыла. Выпуклая поверхность закрылка, которая возникает во время его отклонения, таким образом, имеет цилиндрическую форму с радиусом кривизны, который несколько меньше толщины крыла на уровне его соединения с закрылком.
Таким образом, понятно, что эффективность устройства парирования момента зависит от многочисленных параметров, связанных с общей конструкцией летательного аппарата, габаритными размерами и формой крыла и закрылков, кинематической схемой перемещения закрылков, с контролем прохождения воздуха в пространстве, разделяющем закрылки и соответствующее крыло. В случае благоприятного выбора этих параметров дополнительный вращающий момент, образуемый в результате различного отклонения закрылков, может достигать от 2% до 4% основного вращающего момента в случаях полета в режиме висения, когда интенсивность этого основного вращающего момента является самой большой, не приводя к уменьшению отрицательной подъемной силы совокупности крыла и закрылка, получаемой в результате отклонения этих закрылков, что составляет порядка 10-15%. Следовательно, наличие закрылков и их асимметричное отклонение может позволить компенсировать от 10 до 25% величины максимального вращающего момента несущего винта, образованного отрицательной подъемной силой совокупности крыла и закрылка во время полета в режиме висения в зависимости от конструкции крыла и закрылков.
Кроме того, целесообразно отметить, что составляющая тангенциальной скорости воздушного потока несущего винта, которая является результатом вращения несущего винта, направлена на создание асимметрии этого воздушного потока на отклоненных закрылках с одной и другой стороны фюзеляжа. Данная асимметрия этого воздушного потока на закрылках способствует созданию дополнительного вращающего момента, который увеличивает вращающий момент устройства парирования момента для противодействия вращающему моменту ротора.
Кроме того, перемещение закрылков может управляться, согласно многочисленным конструкциям, для создания возможности возникновения дополнительного вращающего момента.
Согласно первой конструкции, закрылки с одной и другой стороны фюзеляжа используют одну и ту же систему управления, которая практически осуществляет совместное отклонение закрылков в соответствии с единой командой на отклонение. Следовательно, закрылки не используются асимметричным образом, за исключением, когда эти команды на отклонение имеют величину, превышающую первый упор, или величину, превышающую или равную второму упору. Действительно, когда команда на отклонение находится за пределами области, ограниченной соответственно первым упором и/или вторым упором, в частности во время полета в режиме висения или на очень малых скоростях для ограничения отрицательной подъемной силы совокупностей крыла и закрылка, закрылки стопорятся соответственно этим первым или этим вторым упором. В связи с этим углы отклонения закрылков различны с одной и другой стороны фюзеляжа летательного аппарата, и образуется дополнительный вращающий момент, как это было описано ранее.
Согласно второй конструкции, закрылки с одной и другой стороны фюзеляжа имеют присущую им особенность системы управления, которая осуществляет индивидуальное отклонение закрылков с одной и другой стороны фюзеляжа в соответствии с одной или множеством команд на отклонение.
Согласно первому способу симметричного функционирования, команды на отклонение идентичны с одной и другой стороны фюзеляжа летательного аппарата. Следовательно, функционирование этой второй конструкции, таким образом, идентично первой конструкции, дополнительный вращающий момент образуется, когда команда на отклонение превышает первый упор или превышает, или является равной второму упору.
Согласно второму способу асимметричного функционирования, команды на отклонение могут быть различными с одной и другой стороны фюзеляжа летательного аппарата. Закрылки могут быть использованы асимметричным образом, в частности для обеспечения, например, функции управления или уравновешивания вокруг продольной оси летательного аппарата, совершающего полет на большой скорости с небольшими углами отклонения закрылков. Следовательно, во время полета в режиме висения или на очень малых скоростях команды на отклонение имеют различные и большие величины, с одной стороны, для ограничения отрицательной подъемной силы совокупностей крыла и закрылка, а с другой стороны, для образования дополнительного вращающего момента. Кроме того, когда команды на отклонение находятся за пределами области, ограниченной соответственно первым упором и/или вторым упором, закрылки блокируются соответственно этим первым и/или этим вторым упором. Следовательно, углы отклонения закрылков различны с одной и другой стороны фюзеляжа летательного аппарата, и образуется дополнительный вращающий момент.
Независимо от технического решения конструкции управления закрылками команда на отклонение определяется пилотами летательного аппарата или же автопилотом, который имеется в летательном аппарате.
Кроме того, независимо от технического решения управления закрылками дополнительный вращающий момент предпочтительно образован как без какого-либо усложнения места установки или управления закрылками, так и увеличения массы комбинированного летательного аппарата и дополнительных финансовых затрат.
Кроме того, системы управления закрылков должны быть конструктивно выполнены для гарантированного обеспечения очень высокой надежности функционирования в полете, т.е. для обеспечения исключительно слабой вероятности поломки. Действительно, если положение одного из закрылков стопорилось иначе, чем как на упоре, или сильно отклонялось от своей заданной величины отклонения, продольные аэродинамические силы могли бы быть чрезвычайно разбалансированы с одной и другой стороны фюзеляжа и, таким образом, поставить под угрозу конструкцию летательного аппарата и/или контроль над его полетом.
Если не представляется возможным обеспечить очень высокую надежность функционирования, каждая система управления закрылками должна быть как минимум способна выявлять и надежно оповещать о поломке. Каждая система управления закрылками, кроме того, должна обеспечивать возможность очень быстро блокировать движение закрылка в его мгновенном положении при обнаружении поломки. Для того чтобы не создавать потенциально опасной асимметрии угла отклонения, блокирование закрылков осуществляется одновременно на двух системах управления в случае оповещения о поломке на любой из двух систем. Блокирование закрылков не рассматривается как серьезное или катастрофическое событие на комбинированном летательном аппарате, поскольку всегда можно осуществлять полет в области ограниченного полета и безопасно приземляться независимо от положения закрылков, когда они блокированы, при условии, что положения блокирования не приводят к очень сильной разбалансировке продольных аэродинамических сил.
Задачей настоящего изобретения также является способ образования дополнительного вращающего момента для комбинированного летательного аппарата; причем этот летательный аппарат располагается в системе отсчета, образованной продольным направлением X, вытянутым от передней части летательного аппарата к задней части летательного аппарата, вертикальным направлением Z, вытянутым снизу вверх перпендикулярно упомянутому продольному направлению X, и поперечным направлением Y, вытянутым слева направо перпендикулярно упомянутым продольному Х и вертикальному Z направлениям. Этот летательный аппарат содержит:
- фюзеляж;
- несущий винт, расположенный сверху фюзеляжа, содержащий множество лопастей, приводимый во вращение вокруг оси, по существу параллельной вертикальному направлению Z, и осуществляющий подъем летательного аппарата за счет аэродинамической подъемной силы лопастей;
- основное устройство парирования момента, образующее основной вращающий момент, противодействующий вращающему моменту ротора CR, который образуется в результате вращения несущего винта;
- по меньшей мере одно крыло, расположенное ниже несущего винта и вытянутое по существу в поперечном направлении Y, и
- по меньшей мере два закрылка, расположенные ниже несущего винта; причем по меньшей мере один закрылок расположен на первой стороне фюзеляжа относительно продольного направления X; причем по меньшей мере один закрылок расположен на второй стороне фюзеляжа относительно продольного направления X; причем каждый закрылок вытянут по существу в поперечном направлении Y; причем каждый закрылок соединен с крылом и подвижен относительно этого крыла; причем каждое крыло образует с закрылком или закрылками, которые соединены с ним, совокупность крыла и закрылка с каждой стороны фюзеляжа.
Совокупности крыла и закрылка образуют продольные аэродинамические силы F1, F2, ориентированные в продольном направлении X с одной и другой стороны фюзеляжа в результате воздействия воздушного потока, образованного как ответное действие аэродинамической подъемной силе несущего винта, и, следовательно, образуют дополнительный вращающий момент, который добавляется к основному вращающему моменту для противодействия вращающему моменту ротора CR; причем упомянутые совокупности крыла и закрылка имеют идентичные аэродинамические профили, а закрылки асимметрично ориентированы по отношению к воздушному потоку, образованному как ответное действие аэродинамической подъемной силе несущего винта с одной и другой стороны фюзеляжа, для того, чтобы коэффициенты аэродинамических продольных сил CT аэродинамических профилей были различными с одной и другой стороны фюзеляжа.
Данный способ содержит следующие этапы:
- этап определения угла отклонения для перемещения каждого закрылка; причем первый угол отклонения δ1 каждого закрылка, расположенный на первой стороне фюзеляжа, больше угла отклонения реверсирования δi и меньше угла отклонения срыва δD, в то время как второй угол отклонения δ2 каждого закрылка, расположенного на второй стороне фюзеляжа, меньше этого угла отклонения реверсирования δi; причем коэффициент продольной аэродинамической силы CT каждой совокупности крыла и закрылка равен нулю для угла отклонения закрылков, равного этому углу отклонения реверсирования δi; причем угол отклонения срыва δD соответствует отрыву потока каждого закрылка; и
- этап перемещения каждого закрылка согласно, соответственно, углу отклонения δ1, δ2.
Кроме того, во время этапа определения угла отклонения согласно этому способу устанавливается первый угол отклонения δ1 с запасом надежности Δδ0, не равным нулю, по отношению к углу отклонения срыва δD, и определяется второй угол отклонения δ2 с разницей углов отклонения Δδ1 по отношению к первому углу отклонения δ1, такой как и .
Изобретение в дальнейшем поясняется описанием вариантов его осуществления, приведенным со ссылкой на прилагаемые чертежи, на которых:
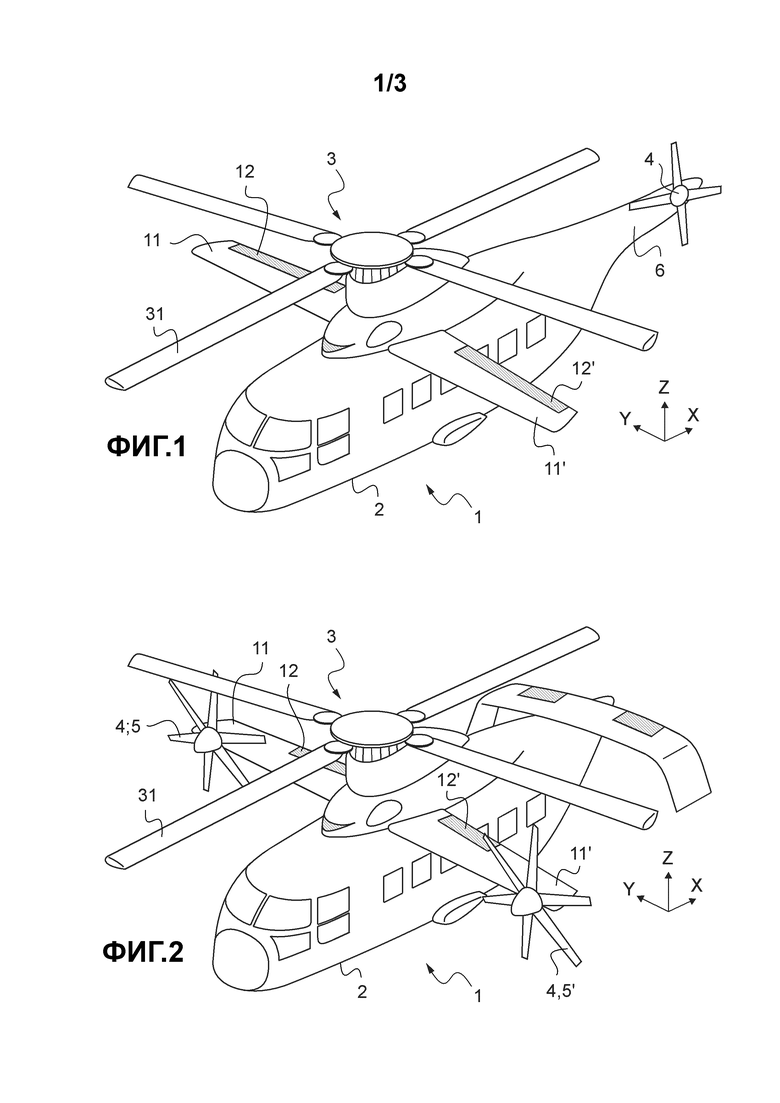
фиг.1 и 2 изображают два варианта осуществления комбинированного летательного аппарата согласно изобретению;
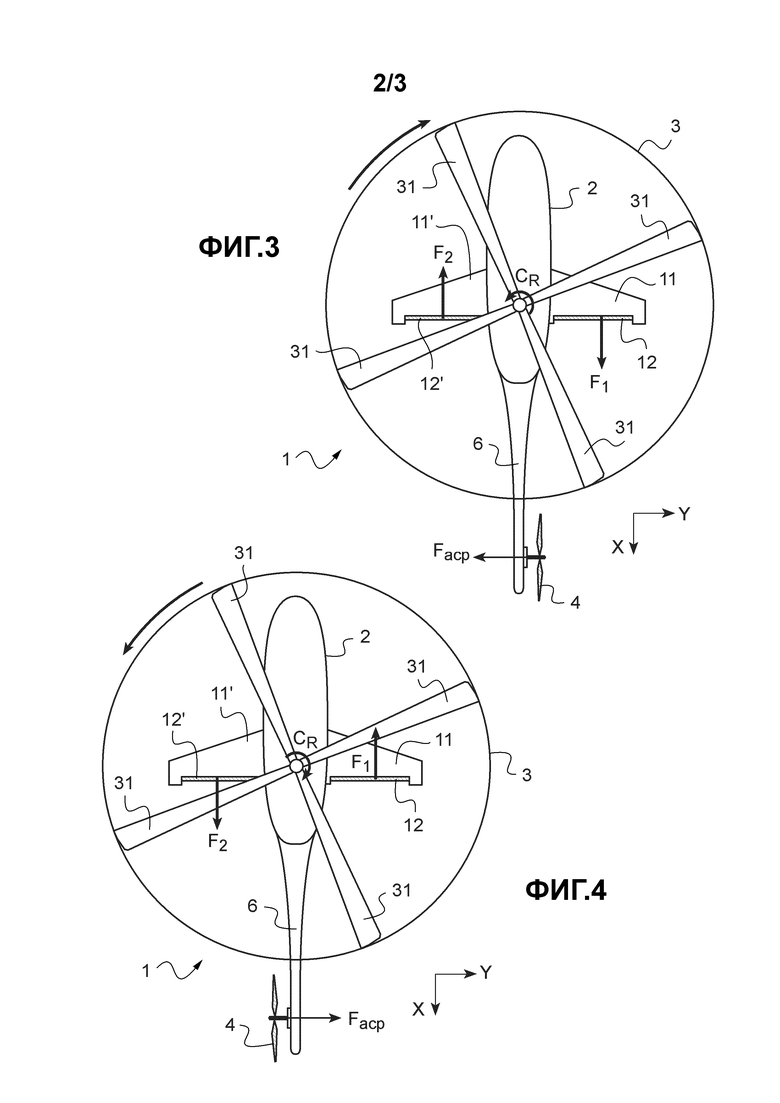
фиг.3 и 4 представляют собой два вида сверху двух комбинированных летательных аппаратов согласно изобретению;
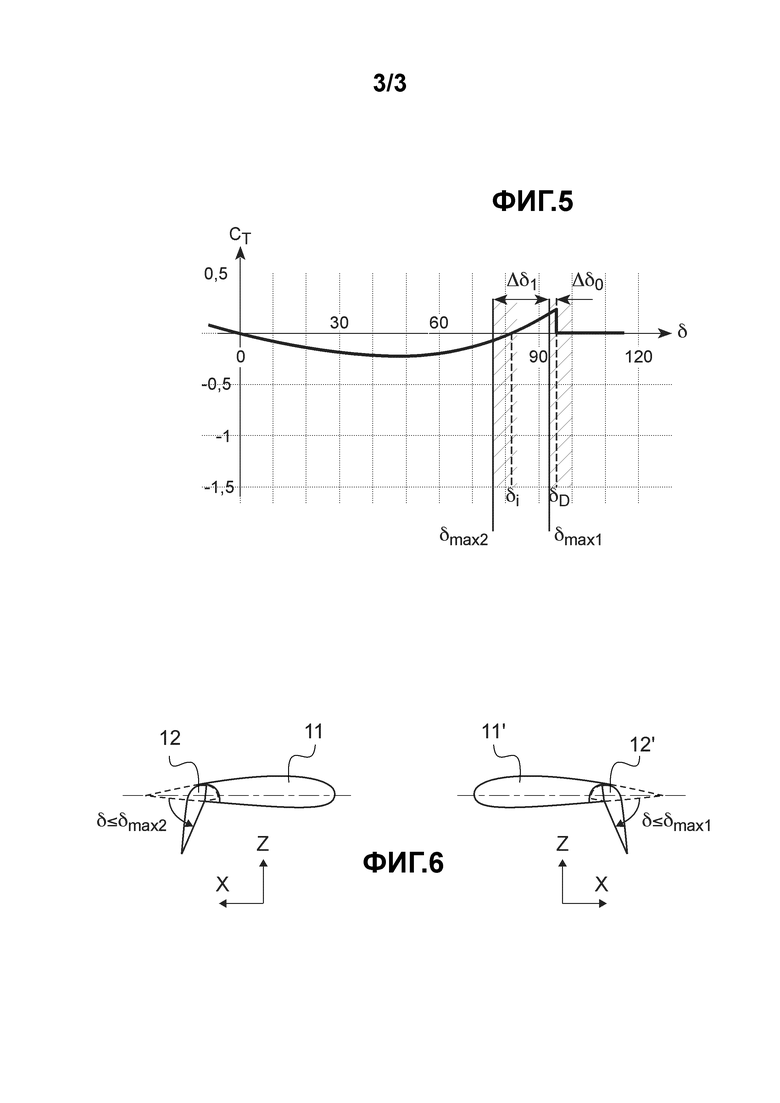
фиг.5 представляет собой график, изображающий изменение коэффициента продольной аэродинамической силы CT совокупности крыла и закрылка;
фиг.6 изображает два детальных вида совокупности крыла и закрылка.
Конструктивные элементы, представленные на нескольких различных чертежах, обозначены одной и той же цифровой позицией.
На фиг.1 и 2 изображен комбинированный летательный аппарат 1, содержащий фюзеляж 2, несущий винт 3, расположенный сверху фюзеляжа 2, два крыла 11, 11', снабженные соответственно закрылком 12, 12', и основное устройство парирования момента 4.
Кроме того, к этому летательному аппарату 1 применена система отсчета X, Y, Z. Продольное направление X вытянуто от передней части летательного аппарата 1 к задней части летательного аппарата 1; вертикальное направление Z вытянуто снизу вверх перпендикулярно продольному направлению X; поперечное направление Y вытянуто слева направо перпендикулярно продольному Х направлению и вертикальному направлению Z.
Продольное направление X является продольной осью летательного аппарата 1, поперечное направление Y является его поперечной осью, а вертикальное направление Z является его вертикальной осью.
Несущий винт 3 имеет по существу вертикальную ось вращения, т.е. по существу параллельную вертикальному направлению Z, и содержит четыре основных лопасти 31. Несущий винт 3 обеспечивает тягу вперед и в целом аэродинамическую подъемную силу летательного аппарата 1.
Крыло 11, 11' расположено с каждой стороны фюзеляжа 2, ниже несущего винта 3. Размах каждого крыла 11, 11' находится в поперечном направлении Y, а его хорда - в продольном направлении X. Каждое крыло 11, 11' содержит, как правило, нижнюю поверхность и верхнюю поверхность. Подвижный закрылок 12, 12' расположен на задней кромке каждого крыла 11, 11'.
Согласно первому способу практического осуществления комбинированного летательного аппарата 1, изображенного на фиг.1, основное устройство парирования момента 4 представлено хвостовым винтом, расположенным на задней оконечной части хвостовой балки 6 летательного аппарата 1. Ось вращения этого хвостового винта по существу горизонтальна и параллельна поперечному направлению Y. Согласно этому первому способу практического осуществления летательного аппарата 1, каждый закрылок 12, 12' вытянут на основную часть размаха крыла 11, 11' для доведения до максимума его воздействия. На фиг.3 и 4 также изображены вид сверху двух комбинированных летательных аппаратов 1 согласно этому первому способу практического осуществления изобретения.
Согласно второму способу практического осуществления комбинированного летательного аппарата 1, изображенного на фиг.2, основное устройство парирования момента 4 образовано двумя толкающими воздушными винтами 5, 5', расположенными соответственно на крыле 11, 11'. Ось вращения каждого толкающего воздушного винта 5, 5' по существу горизонтальна и параллельна продольному направлению X. Согласно этому второму способу практического осуществления летательного аппарата 1, каждый закрылок 12, 12' не находится в зоне, обдуваемой потоком каждого толкающего воздушного винта 5, 5', для того, чтобы не препятствовать воздействию этого толкающего воздушного винта 5, 5'.
Независимо от способа практического осуществления каждый закрылок 12, 12' подвижен, вращаясь относительно соответственно крыла 11, 11', на котором он установлен, как это изображено на фиг.6. Предусматривается, что закрылок 12, 12' имеет нулевой угол отклонения δ, когда хорда данного закрылка 12, 12' является продолжением хорды крыла 11, 11'. Этот угол отклонения δ затем образуется углом между текущим положением закрылка 12, 12' и его положением на продолжение крыла 11, 11', как это показано на этой фиг.6.
При совершении полета на крейсерской скорости угол отклонения δ закрылков 12, 12' небольшой и он позволяет регулировать аэродинамическую подъемную силу крыла 11, 11'. Продольная аэродинамическая сила крыла 11, 11' остается небольшой и по существу симметричной воздушному потоку, имеющему в свою очередь небольшой угол атаки по отношению к крылу 11, 11', т.е. воздушному потоку перед крылом 11, 11', по существу параллельному продольному направлению X.
В том случае, когда летательный аппарат 1 находится в режиме висения, на этапе взлета, или когда им совершается полет на очень малых скоростях, воздушный поток, обдувающий крыло 11, 11' параллельно продольному направлению X, является слабым и даже несущественным. И наоборот, в результате ответного действия на аэродинамическую подъемную силу несущего винта 3 воздушный поток перед крылом 11, 11' по существу параллелен вертикальному направлению Z. Этот воздушный поток направлен сверху вниз и достигает, таким образом, сначала верхнюю поверхность крыла 11, 11'. Угол атаки этого воздушного потока относительно крыла 11, 11' составляет, таким образом, порядка -90° согласно применяемой инструкции, в соответствии с которой угол атаки считается положительным, когда воздушный поток воздействует на крыло 11, 11' через нижнюю поверхность крыла, и отрицательным, когда он воздействует на крыло 11, 11' через верхнюю поверхность.
Впоследствии, взлет, осуществляемый в результате движения этого воздушного потока, который начинается, с одной стороны, на передней кромке крыла 11, 11', а с другой стороны, на задней кромке закрылка 12, 12', приводит к образованию на нижней поверхности пониженного давления, а на верхней поверхности повышенного давления. Следовательно, аэродинамическая нагрузка отрицательной подъемной силы в вертикальном направлении Z, которая направлена вниз и противодействует, таким образом, аэродинамической подъемной силе, образуемой несущим винтом 3, возникает на уровне каждой совокупности крыла 11, 11' и закрылка 12, 12', а также продольной аэродинамической силы в продольном направлении X.
Закрылки 12, 12', когда они перемещены с углом отклонения δ, составляющим почти 90°, позволяют уменьшить, в частности, поверхность профиля верхней поверхности совокупности крыла 11, 11' и закрылка 12, 12', на которую воздействует этот воздушный поток несущего винта 3, и, следовательно, интенсивность его отрицательной подъемной силы. Эта вертикальная аэродинамическая сила, рассматриваемая в каждой элементарной части, перпендикулярной поперечному направлению Y совокупности крыла 11, 11' и закрылка 12, 12', подвергаемой воздействию воздушного потока, в частности, пропорциональна коэффициенту вертикальной аэродинамической силы, или также называемой нормалью CN.
Перемещение закрылков 12, 12' позволяет также изменить продольную аэродинамическую силу, рассматриваемую в этой же части совокупности крыла 11, 11' и закрылка 12, 12'. Эта продольная аэродинамическая сила, в частности, пропорциональна коэффициенту продольной аэродинамической силы CT, или также называемой тангенциальной. Изменение этого коэффициента продольной аэродинамической силы CT для угла атаки воздушного потока, составляющего -90°, т.е. соответствующего воздушному потоку несущего винта 3, показано на фиг.5 в зависимости от угла отклонения δ закрылка 12, 12'.
Отмечается, что этот коэффициент продольной аэродинамической силы CT является отрицательным для угла отклонения δ закрылка 12, 12', находящегося в пределах значений от 0 до δi, нулевым - для угла отклонения δi реверсирования, и положительным - для угла отклонения δ, находящегося в пределах значений от δi до δD.
Такое изменение коэффициента продольной аэродинамической силы CT совокупности крыла 11, 11' и закрылка 12, 12' и, следовательно, продольной аэродинамической силы является результатом, в частности, изменения амплитуды и направления повышения давления, оказываемого на верхнюю поверхность закрылка 12, 12' и на выпуклую поверхность, которая обеспечивает соединение закрылка 12, 12' с крылом 11, 11', вследствие увеличения угла отклонения δ закрылка 12, 12'.
При приближении к углу отклонения δi реверсирования истечение воздушного потока на выпуклую часть на верхней поверхности закрылка 12, 12' продолжает ускоряться вместе с одновременным уменьшением давления согласно уравнению Бернулли, следствием чего является изменение знака коэффициента продольной аэродинамической силы CT на обратный при прохождении этого угла отклонения δi реверсирования и, следовательно, изменения на противоположное направление продольной аэродинамической силы, возникающей на каждой совокупности крыла 11, 11' и закрылка 12, 12'.
Кроме того, при угле отклонения срыва δD происходит срыв потока с закрылка 12, 12', что влечет за собой резкий срыв истечения воздушного потока с поверхности закрылка 12, 12' и, следовательно, падение коэффициента продольной аэродинамической силы CT. Также отмечается, что изменение коэффициента продольной аэродинамической силы CT является очень быстрым при величинах угла отклонения, непосредственно предшествующих углу отклонения срыва δD.
Действительно, размещая закрылки 12, 12' с одной и другой стороны фюзеляжа 2, соответственно, с углом отклонения, который больше или меньше угла отклонения δi реверсирования, две совокупности крыла 11, 11' и закрылка 12, 12' имеют различные коэффициенты продольных аэродинамических сил CT и противоположные знаки и, следовательно, различные продольные аэродинамические силы F1, F2 и противоположные направления. Эти продольные аэродинамические силы F1, F2, обладающие противоположными знаками и расположенные с одной и другой стороны фюзеляжа 2, позволяют создавать требуемый дополнительный вращающий момент вокруг оси вращения несущего винта 3; причем данный дополнительный вращающий момент добавляется к основному вращающему моменту основного устройства парирования момента 4 для удерживания в равновесии вращающий момент ротора CR несущего винта 3 комбинированного летательного аппарата 1.
Однако, угол отклонения δ закрылков 12, 12' не должен достигать значения угла отклонения срыва δD для того, чтобы не допустить резкой потери требуемого дополнительного вращающего момента. С этой целью первый механический упор, соответствующий первому максимальному углу отклонения δmax1, может быть установлен на первом крыле 11, размещенном с первой стороны фюзеляжа 2. Этот первый максимальный угол отклонения δmax1, таким образом, должен быть строго меньше угла отклонения срыва δD. Таким образом, применяется запас надежности Δδ0 между первым максимальным углом отклонения δmax1 и углом отклонения срыва δD. Этот запас надежности Δδ0 составляет, например, от 2° до 5°.
Кроме того, для того чтобы интенсивность двух продольных аэродинамических сил F1, F2 была достаточной для образования значительного дополнительного вращающего момента, должна поддерживаться разность углов отклонения Δδ1 между углами отклонения закрылков 12, 12ʹ с одной и другой стороны фюзеляжа 2. С этой целью на втором крыле 11', размещенном со второй стороны фюзеляжа 2, может быть установлен второй механический упор; причем этот второй механический упор соответствует второму максимальному углу отклонения δmax2. Этот второй максимальный угол отклонения δmax2 строго меньше первого максимального угла отклонения δmax1; причем разница между первым максимальным углом отклонения δmax1 и вторым максимальным углом отклонения δmax2 соответствует разнице углов отклонения Δδ, которая, например, составляет от 10° до 15°.
Предпочтительно применение первого и второго упоров позволяет максимально эффективно использовать зону с большим градиентом коэффициента продольной аэродинамической силы CT каждого закрылка 12, 12', как это показано на графике, представленном на фиг.5, с максимальной разницей продольных аэродинамических сил между двумя сторонами фюзеляжа 2 при относительно небольшой разнице углов отклонения этих закрылков 12, 12', оставаясь при этом в зоне, для которой интенсивность отрицательной подъемной силы совокупностей крыла 11, 11' и закрылка 12, 12' является минимальной.
Каждое крыло 11, 11', на которых расположены соответственно первый упор и второй упор, определено согласно направлению вращения несущего винта 3, и, следовательно, вращающего момента ротора CR, образуемого в результате данного вращения несущего винта 3, на фюзеляже 2 комбинированного летательного аппарата 1.
Согласно первому примеру, изображенному на фиг.3, несущий винт 3 (вид сверху) вращается в направлении по часовой стрелке, а вращающий момент ротора CR, ориентированный в направлении против часовой стрелки, накладывается, таким образом, на фюзеляже 2 вокруг оси вращения несущего винта 3. Для удерживания в равновесии этого вращающего момента ротора CR основное устройство парирования момента 4, типа хвостового винта, производит поперечное усилие Facp, направленное к левой стороне фюзеляжа 2, как показано на этой фиг.3, и это поперечное усилие Facp создает основной вращающий момент, противодействующий вращающему моменту ротора CR.
Дополнительный вращающий момент, образуемый продольными аэродинамическими силами F1, F2, должен быть добавлен к основному вращающему моменту. Действительно, первая продольная аэродинамическая сила F1, прилагаемая к первому крылу 11, размещенному на первой стороне фюзеляжа 2, на которую не направлено поперечное усилие Facp основного устройства парирования момента 4, т.е. на правой стороне фюзеляжа 2, как это показано на фиг.3, направлена на заднюю часть летательного аппарата 1, а вторая продольная аэродинамическая сила F2, прилагаемая ко второму крылу 11', находящемуся на второй стороне фюзеляжа 2, на которую направлено поперечное усилие Facp основного устройства парирования момента 4, т.е. на левой стороне фюзеляжа 2, как это изображено на фиг.3, направлена на переднюю часть летательного аппарата 1.
Действительно, первый закрылок 12, размещенный на задней кромке первого крыла 11, должен иметь угол отклонения, который больше угла отклонения второго закрылка 12', расположенного на задней кромке второго крыла 11'. Согласно правилам имеющихся знаков, первая продольная аэродинамическая нагрузка F1 должна быть положительной, т.е. направленной от передней части летательного аппарата 1 к задней части летательного аппарата 1. В связи с этим коэффициент продольной аэродинамической силы CT совокупности первого крыла 11 и первого закрылка 12 должен быть положительным, что соответствует углу отклонения δ первого закрылка 12, который больше угла отклонения δi реверсирования. Коэффициент продольной аэродинамической силы CT совокупности первого крыла 11 и первого закрылка 12 находится, таким образом, в зоне с большим градиентом, как это изображено на графике, представленном на фиг.5.
Следовательно, это первое крыло 11 содержит первый механический упор для ограничения угла отклонения первого закрылка 12 первым максимальным углом отклонения δmax1. Второе крыло 11' содержит второй механический упор для ограничения угла отклонения второго закрылка 12' вторым максимальным углом отклонения δmax2.
Согласно второму примеру, изображенному на фиг.4, несущий винт 3 (вид сверху) вращается в направлении против часовой стрелки, а вращающий момент ротора CR в направлении по часовой стрелке и накладывается, таким образом, на фюзеляже 2 вокруг оси вращения несущего винта 3. В этом случае первая продольная аэродинамическая нагрузка F1, примененная к первому крылу 11, должна быть направлена к передней части летательного аппарата 1, а вторая продольная аэродинамическая нагрузка F2, примененная ко второму крылу 11', должна быть направлена к задней части летательного аппарата 1.
Таким образом, вторая продольная аэродинамическая сила F2 должна быть положительной, как и коэффициент продольной аэродинамической силы CT совокупности второго крыла 11' и второго закрылка 12'; причем угол отклонения δ второго закрылка 12' должен быть больше угла отклонения δi реверсирования. Коэффициент продольной аэродинамической силы CT совокупности второго крыла 11' и второго закрылка 12' находится, таким образом, в этой зоне с большим градиентом.
Следовательно, как это изображено на фиг.6, второе крыло 11' содержит первый механический упор для ограничения угла отклонения второго закрылка 12' первым максимальным углом отклонения δmax1. Первое крыло 11 содержит второй механический упор для ограничения угла отклонения первого закрылка 12 вторым максимальным углом отклонения δmax2.
Действительно, во время полета в режиме висения, взлета или полета на очень малых скоростях закрылки 12, 12' отклонены под большим углом, составляющим почти 90°, для максимального уменьшения отрицательной подъемной силы совокупностей крыла 11, 11' и закрылка 12, 12'. Перемещение закрылков 12, 12', таким образом, ограничено первым и вторым упорами соответственно первым максимальным углом отклонения δmax1 и вторым максимальным углом отклонения δmax2. Таким образом, дополнительный вращающий момент дополняет основной вращающий момент для удерживания в равновесии вращающего момента ротора CR, не влияя при этом на уменьшение этой отрицательной подъемной силы. Следовательно, силовая установка комбинированного летательного аппарата 1 менее подвержена влиянию, с одной стороны, такого уменьшения этой отрицательной подъемной силы, а с другой стороны, наличию этого дополнительного вращающего момента, который позволяет облегчить основное устройство парирования момента.
Конечно, настоящее изобретение подлежит многочисленным изменениям, что касается его практического осуществления. Хотя было приведено описание множества способов осуществления, вполне понятно, что не представляется возможным выявить исчерпывающим образом все возможные способы. Безусловно, можно заменить описанное средство эквивалентным средством, не выходя при этом за рамки настоящего изобретения.
Настоящее изобретение относится к области авиации, в частности к конструкциям комбинированных винтокрылых летательных аппаратов. Комбинированный летательный аппарат (1) содержит фюзеляж (2), несущий винт (3), основное устройство парирования момента (4) и два крыла (11, 11'), расположенных с одной и другой стороны упомянутого фюзеляжа (2). Каждое крыло (11, 11') содержит по меньшей мере один подвижный закрылок (12, 12'), расположенный на уровне его задней кромки. Упомянутые закрылки (12, 12') могут быть асимметрично ориентированы по отношению к воздушному потоку, образованному как ответное действие аэродинамической подъемной силе упомянутого несущего винта (3) с одной и другой стороны упомянутого фюзеляжа (2) для создания продольных аэродинамических сил противоположного направления на одной и другой стороне упомянутого фюзеляжа (2). Достигается возможность создания дополнительного вращающего момента, который добавляется к основному вращающему моменту упомянутого основного устройства парирования момента (4) несущего винта. 2 н. и 14 з.п. ф-лы, 6 ил.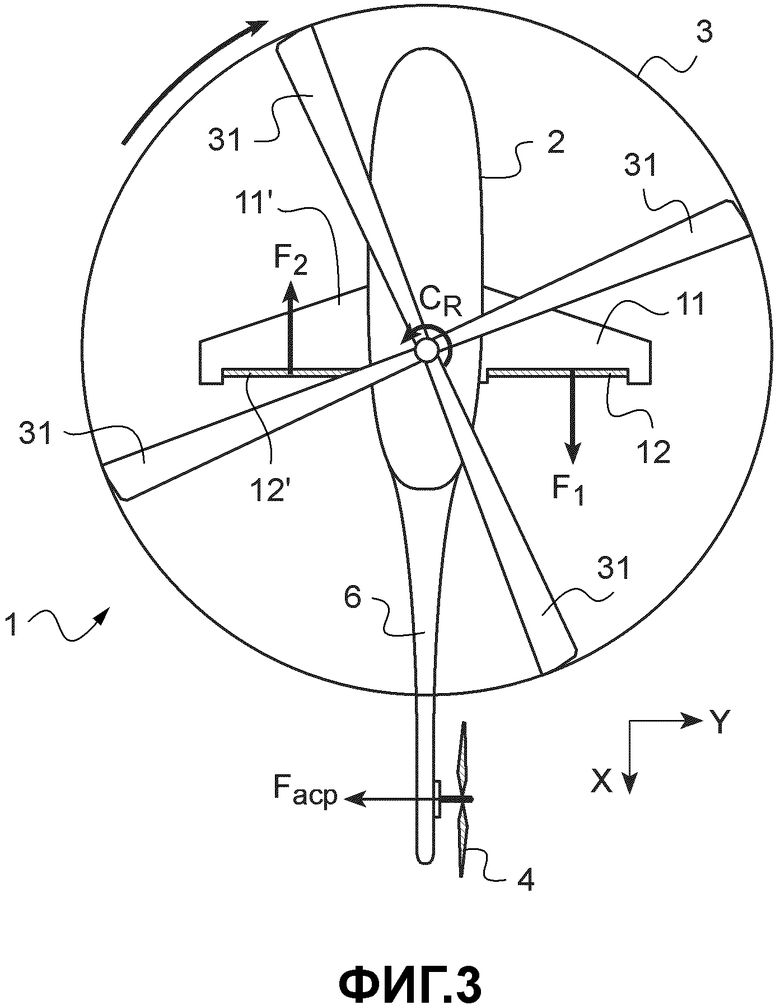
1. Комбинированный летательный аппарат (1), находящийся в системе отсчета, представленной продольным направлением X, вытянутым от передней части упомянутого летательного аппарата (1) к задней части упомянутого летательного аппарата (1), вертикальным направлением Z, вытянутым снизу вверх перпендикулярно упомянутому продольному направлению X, и поперечным направлением Y, вытянутым слева направо перпендикулярно упомянутым продольному X и вертикальному Z направлениям; причем упомянутый летательный аппарат (1) содержит:
- фюзеляж (2);
- несущий винт (3), расположенный сверху упомянутого фюзеляжа (2), содержащий множество лопастей (31), приводимый во вращение вокруг оси, по существу параллельной упомянутому вертикальному направлению Z, и осуществляющий подъем упомянутого летательного аппарата (1) за счет аэродинамической подъемной силы упомянутых лопастей (31);
- основное устройство парирования момента (4), образующее основной вращающий момент, противодействующий вращающему моменту ротора CR, образованному в результате вращения упомянутого несущего винта (3);
- по меньшей мере одно крыло (11, 11'), расположенное снизу упомянутого несущего винта (3) и вытянутое по существу согласно упомянутому поперечному направлению Y, и
- по меньшей мере два закрылка (12, 12'), расположенные снизу упомянутого несущего винта (3); причем по меньшей мере один закрылок (12, 12') расположен на первой стороне упомянутого фюзеляжа (2) относительно упомянутого продольного направления X; причем по меньшей мере один закрылок (12, 12') расположен на второй стороне упомянутого фюзеляжа (2) относительно упомянутого продольного направления X; причем каждый закрылок (12, 12') вытянут по существу согласно упомянутому поперечному направлению Y; причем каждый закрылок (12, 12') соединен с крылом (11, 11') и подвижен относительно упомянутого крыла (11, 11'); причем каждое крыло (11, 11') образует с закрылком или закрылками (12, 12'), которые соединены с ним, совокупность крыла (11, 11') и закрылка (12, 12') на каждой стороне упомянутого фюзеляжа (2),
причем упомянутые совокупности крыла (11, 11') и закрылка (12, 12') образуют продольные аэродинамические силы (F1, F2), ориентированные согласно упомянутому продольному направлению X с одной и другой стороны упомянутого фюзеляжа (2) под воздействием воздушного потока, образованного как ответное действие упомянутой аэродинамической подъемной силе упомянутого несущего винта (3), и, следовательно, образуют дополнительный вращающий момент, который добавляется к упомянутому основному вращающему моменту для противодействия упомянутому вращающему моменту ротора CR; причем упомянутые совокупности крыла (11, 11') и закрылка (12, 12') имеют идентичные аэродинамические профили, а упомянутые закрылки (12, 12') асимметрично ориентированы относительно воздушного потока, образованного в качестве ответного действия упомянутой аэродинамической подъемной силе упомянутого несущего винта (3) с одной и другой стороны упомянутого фюзеляжа (2), для того, чтобы упомянутые коэффициенты продольных аэродинамических сил CT упомянутых аэродинамических профилей были различными на одной и другой стороне упомянутого фюзеляжа (2),
отличающийся тем, что перемещение каждого закрылка (12, 12') определено углом отклонения; причем первый угол отклонения δ1 каждого закрылка (12, 12'), расположенного на упомянутой первой стороне упомянутого фюзеляжа (2), больше угла отклонения реверсирования δi и меньше угла отклонения срыва δD, в то время как второй угол отклонения δ2 каждого закрылка (12, 12'), расположенного на упомянутой второй стороне упомянутого фюзеляжа (2), меньше упомянутого угла отклонения реверсирования δi; причем упомянутый коэффициент продольной аэродинамической силы CT каждой совокупности крыла (11, 11') и закрылка (12, 12') равен нулю для угла отклонения упомянутых закрылков (12, 12'), равного упомянутому углу отклонения реверсирования δi; причем упомянутый угол отклонения срыва δD соответствует срыву потока с каждого закрылка (12, 12').
2. Летательный аппарат (1) по п.1, отличающийся тем, что упомянутые продольные аэродинамические силы (F1, F2) имеют противоположные направления с одной и другой стороны фюзеляжа (2).
3. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что упомянутый первый угол отклонения δ1 и упомянутый второй угол отклонения δ2 симметричны относительно упомянутого угла отклонения реверсирования δi.
4. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что первый угол отклонения δ1 определен с запасом надежности Δδ0 не равным нулю по отношению к упомянутому углу отклонения срыва δD, а упомянутый второй угол отклонения δ2 определен с разницей углов отклонения Δδ1 по отношению к упомянутому первому углу отклонения δ1, как  и
и  .
.
5. Летательный аппарат (1) по п.4, отличающийся тем, что упомянутая разница углов отклонения Δδ1 составляет от десяти до пятнадцати градусов (от 10°до 15°).
6. Летательный аппарат (1) по п. 4, отличающийся тем, что упомянутый запас надежности Δδ0 составляет от двух до пяти градусов (от 2° до 5°).
7. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что перемещение каждого закрылка (12, 12') определено углом отклонения; причем каждое крыло (11, 11ʹ) содержит механический упор, ограничивающий перемещение упомянутых закрылков (12, 12'); причем первый механический упор расположен на каждом первом крыле (11, 11'), установленном на упомянутой первой стороне упомянутого фюзеляжа (2), для ограничения упомянутого угла отклонения каждого закрылка (12, 12'), расположенного на упомянутой первой стороне упомянутого фюзеляжа (2) с первым максимальным углом отклонения δmax1, а второй механический упор расположен на каждом втором крыле (11, 11'), установленном на упомянутой второй стороне упомянутого фюзеляжа (2), для ограничения упомянутого угла отклонения каждого закрылка (12, 12'), расположенного на упомянутой второй стороне упомянутого фюзеляжа (2) со вторым максимальным углом отклонения δmax2.
8. Летательный аппарат (1) по п.7, отличающийся тем, что упомянутый первый упор расположен с запасом надежности Δδ0 по отношению к углу отклонения срыва δD упомянутого закрылка (12, 12'), а упомянутый второй механический упор расположен с разницей углов отклонения Δδ1 по отношению к упомянутому первому упору; причем упомянутый угол отклонения срыва δD соответствует срыву потока с каждого закрылка (12, 12').
9. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что упомянутая первая сторона и упомянутая вторая сторона упомянутого фюзеляжа (2) определены согласно направлению вращения упомянутого несущего винта (3) для того, чтобы упомянутый дополнительный вращающий момент противодействовал упомянутому вращающему моменту ротора CR.
10. Летательный аппарат (1) по любому из пп.1. 2, отличающийся тем, что каждый закрылок (12, 12') имеет длину хорды, составляющую от 20% до 35% длины хорды каждого крыла (11, 11ʹ).
11. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что каждый закрылок (12, 12') подвижен во вращении относительно каждого крыла (11, 11'); причем центр вращения закрылка (12, 12') расположен внутри упомянутого крыла (11, 11ʹ) и близко к нижней поверхности упомянутого крыла (11, 11').
12. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что упомянутый летательный аппарат (1) содержит только одно крыло (11, 11'), которое представляет собой общее аэродинамическое крыло, вытянутое с одной и другой стороны продольного направления X.
13. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что упомянутый летательный аппарат (1) содержит два крыла (11, 11'), которые представляют собой два отдельных аэродинамических крыла; причем первое крыло (11) расположено на первой стороне упомянутого фюзеляжа (2) согласно упомянутому продольному направлению X, а второе крыло (11') расположено на второй стороне упомянутого фюзеляжа (2) согласно упомянутому продольному направлению X.
14. Летательный аппарат (1) по любому из пп.1, 2, отличающийся тем, что упомянутый летательный аппарат (1) содержит по меньшей мере один толкающий воздушный винт (5, 5'), расположенный на каждом крыле (11, 11'); причем каждый закрылок (12, 12') размещен на каждом крыле (11, 11') за пределами зоны, подвергаемой воздействию воздушного потока толкающего воздушного винта (5, 5').
15. Способ образования дополнительного вращающего момента для комбинированного летательного аппарата (1); причем упомянутый летательный аппарат (1) находится в системе отсчета, образованной продольным направлением X, вытянутым от передней части упомянутого летательного аппарата (1) к задней части упомянутого летательного аппарата (1), вертикальным направлением Z, вытянутым снизу вверх перпендикулярно упомянутому продольному направлению X, и поперечным направлением Y, вытянутым слева направо перпендикулярно упомянутым продольному Х и вертикальному Z направлениям; причем упомянутый летательный аппарат (1) содержит:
- фюзеляж (2);
- несущий винт (3), расположенный сверху упомянутого фюзеляжа (2), содержащий множество лопастей (31) и приводимый во вращение вокруг оси, по существу параллельной упомянутому вертикальному направлению Z, который осуществляет подъем упомянутого летательного аппарата (1) за счет аэродинамической подъемной силы упомянутых лопастей (31);
- основное устройство парирования момента (4), образующее основной вращающий момент, противодействующий вращающему моменту ротора CR, образуемому в результате вращения упомянутого несущего винта (3);
- по меньшей мере одно крыло (11, 11'), установленное ниже упомянутого несущего винта (3) и вытянутое по существу согласно упомянутому поперечному направлению Y, и
- по меньшей мере два закрылка (12, 12'), размещенные ниже упомянутого несущего винта (3); причем по меньшей мере один закрылок (12, 12') расположен на первой стороне упомянутого фюзеляжа (2) относительно упомянутого продольного направления X; причем, по меньшей мере, один закрылок (12, 12') расположен на второй стороне упомянутого фюзеляжа (2) относительно упомянутого продольного направления X; причем каждый закрылок (12, 12') вытянут по существу согласно упомянутому поперечному направлению Y; причем каждый закрылок (12, 12') соединен с крылом (11, 11') и подвижен относительно упомянутого крыла (11, 11'); причем каждое крыло (11, 11') образует с закрылком или закрылками (12, 12'), которые с ним соединены, совокупность крыла (11, 11') и закрылка (12, 12ʹ) на каждой стороне упомянутого фюзеляжа (2),
причем упомянутые совокупности крыла (11, 11') и закрылка (12, 12') образуют продольные аэродинамические силы (F1, F2), ориентированные согласно упомянутому продольному направлению X на одной и другой стороне упомянутого фюзеляжа (2) под воздействием воздушного потока, образованного как ответное действие упомянутой аэродинамической подъемной силе упомянутого несущего винта (3), и, следовательно, образуют дополнительный вращающий момент, который добавляется к упомянутому основному вращающему моменту для противодействия упомянутому вращающему моменту ротора CR; причем упомянутые совокупности крыла (11, 11') и закрылка (12, 12') имеют идентичные аэродинамические профили, а упомянутые закрылки (12, 12') асимметрично ориентированы по отношению к воздушному потоку, образованному как ответное действие упомянутой аэродинамической подъемной силе упомянутого несущего винта (3) с одной и другой стороны упомянутого фюзеляжа (2), для того, чтобы упомянутые коэффициенты продольных аэродинамических сил CT упомянутых аэродинамических профилей были различными на одной и другой стороне упомянутого фюзеляжа (2),
отличающийся тем, что упомянутый способ содержит следующие этапы:
- определяют угол отклонения для перемещения каждого закрылка (12, 12'); причем первый угол отклонения δ1 каждого закрылка (12, 12'), расположенного на упомянутой первой стороне упомянутого фюзеляжа (2), больше угла отклонения реверсирования δi и меньше угла отклонения срыва δD, в то время как второй угол отклонения δ2 каждого закрылка (12, 12'), расположенного на упомянутой второй стороне упомянутого фюзеляжа (2), меньше упомянутого угла отклонения реверсирования δi; причем упомянутый коэффициент продольной аэродинамической силы CT каждой совокупности крыла (11, 11') и закрылка (12, 12') является нулевым для угла отклонения упомянутых закрылков (12, 12'), равного упомянутому углу отклонения реверсирования δi; причем упомянутый угол отклонения срыва δD соответствует отрыву потока с каждого закрылка (12,12'), и
- перемещают каждый закрылок, соответственно, согласно упомянутому углу отклонения δ1, δ2.
16. Способ по п.15, отличающийся тем, что на этапе определения угла отклонения
- определяют упомянутый первый угол отклонения δ1 с запасом надежности Δδ0, который не равен нулю, по отношению к упомянутому углу отклонения срыва δD, и
- определяют упомянутый второй угол отклонения δ2 с разницей углов отклонения Δδ1 по отношению к упомянутому первому углу отклонения δ1, как и .
| US 4928907 A, 29.05.1990 | |||
| US 2005151001 A1, 14.07.2005 | |||
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫЛКАМИ КРЫЛЬЕВ И ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ ГИБРИДНОГО ВЕРТОЛЕТА | 2013 |
|
RU2551703C2 |
| Устройство для измерения ускорений | 1956 |
|
SU110715A1 |
| US 2008272244 A1, 06.11.2008. | |||

