ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к направляемым магнитным резонансом линейным ускорителям (LINAC), в частности к использованию моделей для компенсации или коррекции прохождения рентгеновских лучей через радиочастотные катушки.
УРОВЕНЬ ТЕХНИКИ
В стандартных системах магнитно-резонансной томографии (MRI) задние и передние катушки, необходимые для приема сигнала от пациента, помещаются вокруг пациента и перемещаются вместе с пациентом. Это означает, что эти катушки могут иметь различное положение каждый раз, когда пациент обследуется. Для систем магнитно-резонансной (MR) визуализации, объединенных с линейным ускорителем (LINAC) или MR-LINAC, лучи излучения от линейного ускорителя могут потенциально повредить радиочастотные катушки и электронику радиочастотных катушек. Катушки могут быть разработаны так, чтобы они были менее чувствительны к лучам излучения. При наличии слишком многих степеней свободы в размещении катушки может стать трудным разработать катушку, которая была бы нечувствительна к излучению во всех случаях.
Патентный документ WO 2004/024235A1 описывает устройство лучевой терапии, содержащее устройство магнитно-резонансной визуализации, интегрированное с линейным ускорителем, в котором средство компенсации В-поля связано с устройством магнитно-резонансной визуализации, которое при использовании подстраивает В-поле, производимое устройством магнитно-резонансной визуализации в непосредственной близости от ускорителя, минимизируя тем самым влияние В-поля на частицы, испускаемые ускорителем.
Патентный документ WO 2012/080948A1 описывает систему планирования и последующих мероприятий лучевой терапии, которая включает в себя магнитно-резонансный сканер с первым отверстием, которое определяет область магнитно-резонансной визуализации, и функциональный сканер со вторым отверстием, которое определяет область компьютерно-томографической или ядерной визуализации. На основе магнитно-резонансных изображений, компьютерно-томографических изображений и изображений позитронно-эмиссионной томографии генерируется или обновляется план облучения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает медицинский инструмент и компьютерный программный продукт в независимых пунктах формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Как будет понятно специалистом в данной области техники, аспекты настоящего изобретения могут быть воплощены как устройство, способ или компьютерный программный продукт. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая встроенное микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта осуществления, комбинирующего аспекты программного и аппаратного обеспечения, которые все в целом могут быть упомянуты в настоящем документе как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного в одном или более машиночитаемых носителях, имеющих записанный на них исполнимый компьютером код.
Может быть использована любая комбинация одного или более машиночитаемых носителей. Машиночитаемый носитель может быть машиночитаемым носителем сигналов или машиночитаемым носителем данных. Использующийся в настоящем документе термин «машиночитаемый носитель данных» охватывает любой материальный носитель данных, который может хранить инструкции, которые являются программой, исполняемой процессором вычислительного устройства. Машиночитаемый носитель данных может упоминаться как машиночитаемый энергонезависимый носитель данных. Машиночитаемый носитель данных может также упоминаться как материальный машиночитаемый носитель. В некоторых вариантах осуществления машиночитаемый носитель данных может также быть способным хранить данные, к которым может получать доступ процессор вычислительного устройства. Примеры машиночитаемых носителей данных включают в себя, не ограничиваясь этим: дискету, магнитный жесткий диск, твердотельный жесткий диск, флэш-память, USB-диск, память произвольного доступа (RAM), память только для чтения (ROM), оптический диск, магнитно-оптический диск и файл регистров процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и цифровые универсальные диски (DVD), например CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R диски. Термин «машиночитаемый носитель данных» также относится к различным типам носителей записи, к которым компьютерное устройство может получать доступ через сеть или линию связи. Например, данные могут быть получены по модему, по Интернету или по локальной сети. Компьютерный исполнимый код, воплощенный на машиночитаемом носителе, может быть передан с использованием любого подходящего носителя, включая, но не ограничиваясь этим, беспроводную и проводную связь, оптоволоконный кабель, радиосвязь и т.д., или любую подходящую комбинацию вышеперечисленного.
Машиночитаемый носитель сигнала может включать в себя передаваемый сигнал данных с компьютерным исполнимым кодом, воплощенным в нем, например, в основной полосе или в качестве части несущей. Такой передаваемый сигнал может принимать любое множество форм, включая, но не ограничиваясь этим, электромагнитную, оптическую или любую подходящую их комбинацию. Машиночитаемый носитель сигнала может быть любым машиночитаемым носителем, который не является машиночитаемым носителем данных и который может передавать, распространять или транспортировать программу для использования или в связи с системой, аппаратом или устройством для выполнения инструкций.
«Компьютерная память» или «память» представляет собой пример машиночитаемого носителя данных. Компьютерная память представляет собой любую память, которая непосредственно доступна для процессора. «Компьютерное запоминающее устройство» или «запоминающее устройство» представляет собой дополнительный пример машиночитаемого носителя данных. Компьютерное запоминающее устройство представляет собой любой энергонезависимый машиночитаемый носитель данных. В некоторых вариантах осуществления компьютерное запоминающее устройство может также быть компьютерной памятью или наоборот.
Использующийся в настоящем документе термин «процессор» охватывает электронный компонент, который в состоянии выполнять программу, или машинную исполнимую инструкцию, или компьютерный исполнимый код. Ссылки на вычислительное устройство, включающее в себя «процессор», должны быть интерпретированы как ссылки на устройство, возможно содержащее более одного процессора или обрабатывающего ядра. Процессор может быть, например, многоядерным процессором. Процессор может также относиться к коллекции процессоров, находящихся в пределах единственной компьютерной системы или распределенных среди множества компьютерных систем. Термин «вычислительное устройство» также должен интерпретироваться как возможно относящийся к коллекции или сети вычислительных устройств, каждое из которых включает в себя процессор или процессоры. Компьютерный исполнимый код может выполняться несколькими процессорами, которые могут находиться в пределах одного и того же вычислительного устройства или которые могут даже быть распределены среди множества вычислительных устройств.
Компьютерный исполнимый код может включать в себя исполнимые машинные инструкции или программу, которая побуждает процессор выполнять один аспект настоящего изобретения. Компьютерный исполнимый код для выполнения операций аспектов настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ и т.п., а также обычные процедурные языки программирования, такие как язык программирования «C» или подобные языки программирования, и скомпилирован в машинно-исполняемые инструкции. В некоторых случаях компьютерный исполнимый код может существовать в форме языка высокого уровня или в предварительно скомпилированной форме и использоваться в соединении с интерпретатором, который генерирует машинно-исполняемые инструкции на лету.
Компьютерно-исполняемый код может выполниться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя через любой тип сети, включая локальную сеть (LAN) или глобальную сеть (WAN), или соединение может быть установлено с внешним компьютером (например, через Интернет с использованием Интернет-провайдера).
Аспекты настоящего изобретения описываются со ссылками на иллюстрирующие блок-схемы и/или блок-диаграммы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления настоящего изобретения. Следует понимать, что каждый блок или часть блоков блок-схем, иллюстраций и/или блок-диаграмм может быть реализован инструкциями компьютерной программы в форме компьютерного исполнимого кода, когда это применимо. Также следует понимать, что комбинации блоков в различных блок-схемах, иллюстрациях и/или блок-диаграммах могут быть объединены, если они не взаимоисключают друг друга. Эти инструкции компьютерной программы могут быть обеспечены для процессора компьютера общего назначения, компьютера специального назначения, или другого программируемого устройства обработки данных для того, чтобы произвести машину, такую, что инструкции, которые выполняются посредством процессора компьютера или другого программируемого устройства обработки данных, создают средства для реализации функций/действий, определенных в блоке или блоках блок-схемы и/или блок-диаграммы.
Эти инструкции компьютерной программы также могут быть сохранены на машиночитаемом носителе, который может предписать компьютеру, другому программируемому устройству обработки данных или другим устройствам функционировать определенным образом так, что инструкции, сохраненные на машиночитаемом носителе, производят готовое изделие, включающее в себя инструкции, которые реализуют функцию/действие, определенную в блоке или блоках блок-схемы и/или блок-диаграммы.
Инструкции компьютерной программы могут также быть загружены на компьютер, другое программируемое устройство обработки данных или другие устройства с тем, чтобы выполнить последовательность операционных стадий на компьютере, другом программируемом устройстве или других устройствах для того, чтобы произвести реализованный на компьютере процесс так, чтобы инструкции, которые выполняются на компьютере или другом программируемом устройстве, обеспечивали процессы для реализации функций/действий, определенных в блоке или блоках блок-схемы и/или блок-диаграммы.
Использующийся в настоящем документе термин «пользовательский интерфейс» относится к интерфейсу, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» также может обозначаться как «человекомашинный интерфейс». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или получать информацию или данные от оператора. Пользовательский интерфейс может обеспечить получение ввода от оператора компьютером и может обеспечить вывод пользователю от компьютера. Другими словами, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, а также может позволить компьютеру показывать эффекты от операторского управления или манипулирования. Отображение данных или информации на дисплее или графический интерфейс пользователя представляет собой пример предоставления информации оператору. Получение данных через клавиатуру, мышь, шаровой указатель, сенсорную панель, ручку координатно-указательного устройства, графический планшет, джойстик, игровой планшет, веб-камеру, гарнитуру, рычаг переключения, руль, педали, проводные перчатки, танцевальный коврик, пульт дистанционного управления и акселерометр - все это примеры компонентов пользовательского интерфейса, которые обеспечивают получение информации или данных от оператора.
Использующийся в настоящем документе термин «аппаратный интерфейс» охватывает интерфейс, который позволяет процессору компьютерной системы взаимодействовать с и/или управлять внешним вычислительным устройством и/или аппаратом. Аппаратный интерфейс может позволять процессору посылать управляющие сигналы или инструкции внешнему вычислительному устройству и/или аппарату. Аппаратный интерфейс может также позволять процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры аппаратного интерфейса включают в себя, не ограничиваясь этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE 488, соединение Bluetooth, соединение беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, MIDI-интерфейс, интерфейс аналогового входа и интерфейс цифрового входа.
Использующийся в настоящем документе термин «дисплей» или «дисплейное устройство» охватывает устройство вывода или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, аудио и/или тактильные данные. Примеры дисплея включают в себя, не ограничиваясь этим: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля,
электронно-лучевую трубку (CRT), запоминающую электронно-лучевую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоский экран, вакуумный флуоресцентный дисплей (VF), светодиодные (LED) дисплеи, электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светодиодах (OLED), проектор, а также шлем виртуальной реальности.
Данные магнитного резонанса (MR) определяются в настоящем документе как измерения радиочастотных сигналов, испускаемых атомными спинами, записанные с помощью антенны устройства магнитного резонанса во время сканирования магнитно-резонансной томографии. Данные магнитного резонанса представляют собой пример данных медицинского изображения. Магнитно-резонансное (MRI) изображение определяется в настоящем документе как реконструированная двух- или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной томографии. Эта визуализация может быть выполнена с использованием компьютера. Часть данных магнитного резонанса может также называться как «снимок». Навигационные данные представляют собой пример данных магнитного резонанса и обычно представляют положение или состояние движения субъекта.
В одном аспекте настоящее изобретение предлагает медицинский инструмент, включающий в себя линейный ускоритель или LINAC с рентгеновским источником для того, чтобы направить рентгеновское излучение/гамма-излучение на целевую зону. Линейный ускоритель выполнен с возможностью вращения рентгеновского источника вокруг оси. Обычно линейные ускорители монтируются на гентри, который может вращаться вокруг оси. Медицинский инструмент дополнительно включает в себя систему магнитно-резонансной томографии для получения данных магнитного резонанса из зоны визуализации с помощью одной или совокупности радиочастотных катушек. Целевая зона находится в зоне визуализации. Система магнитно-резонансной томографии включает в себя магнит для создания магнитного поля в зоне визуализации. Радиотерапевтический источник выполнен с возможностью вращения, по меньшей мере частично, вокруг магнита. В некоторых вариантах осуществления рентгеновское излучение будет проходить через магнит или через часть магнита. В других вариантах осуществления магнит проектируется как разделенный магнит так, чтобы рентгеновское излучение не попадало на магнит.
Медицинский инструмент дополнительно включает в себя процессор для управления медицинским инструментом. Медицинский инструмент дополнительно включает в себя память для хранения модели прохождения рентгеновских лучей через оборудование, а также для хранения исполняемых процессором инструкций. Выполнение инструкций побуждает процессор получать план обработки для облучения целевой зоны. Использующийся в настоящем документе план обработки представляет собой данные, которые определяют обработку определенной области или областей субъекта. План обработки может также содержать анатомические отметки, которые могут использоваться для того, чтобы привязать план обработки к медицинским изображениям, таким как изображение магнитного резонанса. Выполнение инструкций дополнительно побуждает процессор модифицировать план обработки в соответствии с моделью прохождения рентгеновских лучей. Поскольку рентгеновский источник генерирует рентгеновские лучи, которые проходят через оборудование, могут быть критические компоненты, которые не должны облучаться, и/или радиочастотная катушка может также ослабить рентгеновские лучи. План обработки также может быть модифицирован для того, чтобы избежать разрушения чувствительных частей радиочастотной катушки и/или также для того, чтобы гарантировать, что облучение целевой зоны выполняется точно. Выполнение инструкций дополнительно побуждает процессор получать данные магнитного резонанса с использованием системы магнитно-резонансной томографии. Выполнение инструкций дополнительно побуждает процессор реконструировать изображение магнитного резонанса из данных магнитного резонанса. Выполнение инструкций дополнительно побуждает процессор привязать расположение целевой зоны к изображению магнитного резонанса. Иначе говоря, целевая зона располагается в изображении магнитного резонанса. Это позволяет привязать план обработки к системе координат системы магнитно-резонансной томографии и линейного ускорителя. Выполнение инструкций дополнительно побуждает процессор генерировать управляющие сигналы в соответствии с расположением целевой зоны и моделью прохождения рентгеновских лучей. В соответствии с этим генерируются подробные управляющие сигналы для управления работой линейного ускорителя. Выполнение инструкций дополнительно побуждает процессор управлять линейным ускорителем так, чтобы облучать целевую зону с использованием управляющих сигналов. Варианты осуществления настоящего изобретения могут быть выгодными, потому что они могут предотвратить повреждение оборудования и/или обеспечить более точное облучение целевой зоны с помощью учета ослабления рентгеновских лучей при их прохождении через оборудование.
В другом варианте осуществления оборудованием является радиочастотная катушка. Радиочастотная катушка присоединена к системе магнитно-резонансной томографии с заданной геометрией. Управляющие сигналы также по меньшей мере частично генерируются с использованием заданной геометрии. Иначе говоря, предопределенная геометрия, расположение целевой зоны и модель прохождения рентгеновских лучей используются для генерирования управляющих сигналов. В этом варианте осуществления радиочастотная катушка присоединена к системе магнитно-резонансной томографии так, что существует предопределенная геометрия. Таким образом модель прохождения рентгеновских лучей имеет свои координаты, определенные относительно координат медицинского инструмента некоторым известным способом.
В другом варианте осуществления радиочастотная катушка включает в себя первую катушку под опорой для субъекта.
В другом варианте осуществления радиочастотная катушка включает в себя фиксированную заднюю катушку под опорой для субъекта.
В другом варианте осуществления радиочастотная катушка включает в себя вторую катушку, фиксированную над опорой для субъекта.
В другом варианте осуществления радиочастотная катушка включает в себя переднюю катушку, фиксированную над опорой для субъекта.
В другом варианте осуществления вторая катушка включает в себя механизм корректировки высоты для корректировки высоты второй катушки относительно субъекта. Этот вариант осуществления может быть полезным, потому что вторая катушка может быть предварительно расположена в отверстии магнита. После того, как субъект был помещен или расположен внутри магнита, вторая катушка может быть отрегулирована на оптимальное расстояние между магнитом и субъектом. Это обеспечивает эффективность катушки при одновременном поддержании заданной геометрии относительно магнита.
В другом варианте осуществления радиочастотная катушка включает в себя фиксированную системную катушку.
В другом варианте осуществления радиочастотная катушка включает в себя фиксированную системную катушку с адаптированной частью для задней катушки.
В другом варианте осуществления радиочастотная катушка может быть присоединенной к субъекту.
В другом варианте осуществления оборудование представляет собой любое одно из следующего: радиочастотная катушка, передающая катушка и/или приемная катушка, маска, дыхательная трубка, датчик, опора для пациента, крепежный элемент, электрод и наушники.
В другом варианте осуществления оборудование включает в себя координатные метки для магнитного резонанса. Выполнение инструкций дополнительно побуждает процессор идентифицировать оборудование на изображении магнитного резонанса. Управляющие сигналы генерируются по меньшей мере частично с использованием положения оборудования. Этот вариант осуществления может быть полезным, потому что если оборудование присоединено к субъекту, положение оборудования невозможно указать относительно системы координат медицинского инструмента. Однако при использовании стандартных методов обработки изображений расположение координатных меток может быть идентифицировано на изображении магнитного резонанса. Это позволяет привязать положение модели прохождения рентгеновских лучей к системе координат медицинского инструмента.
В другом варианте осуществления катушка включает в себя кабель с устройством измерения положения. Устройство измерения положения может быть, например, потенциометром, или потенциометры могут быть присоединены к структурам для измерения положения оборудования. Устройство измерения положения также может быть, например, волокном с восприятием формы. Использующийся в настоящем документе термин «волокно с восприятием формы» означает кабель, который имеет технологию распознавания формы и может отслеживать положение кабеля с высокой степенью точности вдоль всей его длины. Например, компания Luna Innovations производит кабель с восприятием формы, который может быть встроен в кабели или присоединен к таким вещам, как хирургические инструменты или другие устройства. Этот кабель имеет оптоволокно со множеством волоконных брэгговских сетчатых датчиков напряжений вдоль его длины. Использование метода рефлектометрии в оптическом диапазоне позволяет опрашивать десятки тысяч датчиков с той же самой номинальной длиной отраженной волны с очень высоким пространственным разрешением. Это обеспечивает отслеживанию положения кабеля.
Выполнение инструкций дополнительно побуждает процессор определять путь кабеля с использованием волокна с восприятием формы. Управляющие сигналы генерируются по меньшей мере частично с использованием пути кабеля. В некоторых вариантах осуществления расположение пути кабеля может использоваться для того, чтобы избежать облучения кабеля. В других вариантах осуществления расположение пути кабеля может использоваться для того, чтобы идентифицировать положение или ориентацию оборудования. Волокно с восприятием формы может также использоваться для того, чтобы идентифицировать расположение других компонентов или датчиков в отверстии магнита. Например, можно идентифицировать расположение датчиков температуры, электродов ЭЭГ или таких вещей как дыхательная трубка, что позволяет определять расположение медицинского инструмента и избежать его облучения.
В другом варианте осуществления волокно с восприятием формы включает в себя наконечник. Наконечник имеет заданную ориентацию относительно оборудования. Управляющие сигналы генерируются по меньшей мере с частичным использованием пути кабеля и заданной ориентации.
В другом варианте осуществления управляющие сигналы используются для того, чтобы побудить рентгеновский источник избегать критических компонентов. Критические компоненты в некоторых вариантах осуществления могут быть критическими радиочастотными компонентами. Эти варианты осуществления могут быть выгодными, потому что критических компонентов можно избежать, что устраняет возможность их повреждения рентгеновским источником.
В другом варианте осуществления управляющие сигналы используются для того, чтобы побудить рентгеновский источник компенсировать ослабление рентгеновского источника оборудованием.
В другом варианте осуществления радиочастотная катушка представляет собой передающую катушку и/или приемную катушку.
В другом аспекте настоящее изобретение предлагает компьютерный программный продукт, включающий в себя исполнимые машиной инструкции для выполнения процессором, управляющим медицинским инструментом и моделью прохождения рентгеновских лучей через оборудование. Медицинский инструмент включает в себя линейный ускоритель с рентгеновским источником для того, чтобы направлять рентгеновское излучение на целевую зону. Линейный ускоритель выполнен с возможностью вращения рентгеновского источника вокруг центра вращения. Медицинский инструмент дополнительно включает в себя систему магнитно-резонансной томографии для получения данных магнитного резонанса с оборудованием из зоны визуализации. Целевая зона находится в зоне визуализации. Система магнитно-резонансной томографии включает в себя магнит для создания магнитного поля в зоне визуализации. Рентгеновский источник выполнен с возможностью вращения, по меньшей мере частично, вокруг магнита. Выполнение инструкций побуждает процессор получать план обработки для облучения целевой зоны.
Выполнение инструкций дополнительно побуждает процессор модифицировать план обработки в соответствии с моделью прохождения рентгеновских лучей. Выполнение инструкций дополнительно побуждает процессор получать данные магнитного резонанса с использованием системы магнитно-резонансной томографии. Выполнение инструкций дополнительно побуждает процессор реконструировать изображение магнитного резонанса из данных магнитного резонанса. Выполнение инструкций дополнительно побуждает процессор привязать расположение целевой зоны к изображению магнитного резонанса. Выполнение инструкций дополнительно побуждает процессор генерировать управляющие сигналы в соответствии с расположением целевой зоны и моделью прохождения рентгеновских лучей. Выполнение инструкций дополнительно побуждает процессор управлять линейным ускорителем так, чтобы облучать целевую зону с использованием управляющих сигналов.
В другом аспекте настоящее изобретение предлагает способ работы медицинского инструмента. Медицинский инструмент включает в себя линейный ускоритель с рентгеновским источником для того, чтобы направлять рентгеновское излучение на целевую зону. Линейный ускоритель выполнен с возможностью вращения рентгеновского источника вокруг центра вращения. Медицинский инструмент дополнительно включает в себя систему магнитно-резонансной томографии для получения данных магнитного резонанса с радиочастотной катушкой из зоны визуализации. Целевая зона находится в зоне визуализации. Система магнитно-резонансной томографии включает в себя магнит для создания магнитного поля в зоне визуализации. Рентгеновский источник выполнен с возможностью вращения, по меньшей мере частично, вокруг магнита. Способ включает в себя стадию получения плана обработки для облучения целевой зоны.
Способ дополнительно включает в себя стадию модификации плана обработки в соответствии с моделью прохождения рентгеновских лучей. Способ дополнительно включает в себя получение данных магнитного резонанса с использованием системы магнитно-резонансной томографии. Способ дополнительно включает в себя реконструирование изображения магнитного резонанса из данных магнитного резонанса. Способ дополнительно включает в себя привязку расположения целевой зоны к изображению магнитного резонанса. Способ дополнительно включает в себя генерирование управляющих сигналов в соответствии с расположением целевой зоны и моделью прохождения рентгеновских лучей. Способ дополнительно включает в себя управление линейным ускорителем для облучения целевой зоны с использованием управляющих сигналов.
Понятно, что один или более из вышеупомянутых вариантов осуществления настоящего изобретения могут быть объединены при условии, что объединенные варианты осуществления не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее предпочтительные варианты осуществления настоящего изобретения будут описаны исключительно для примера и со ссылками на чертежи, на которых:
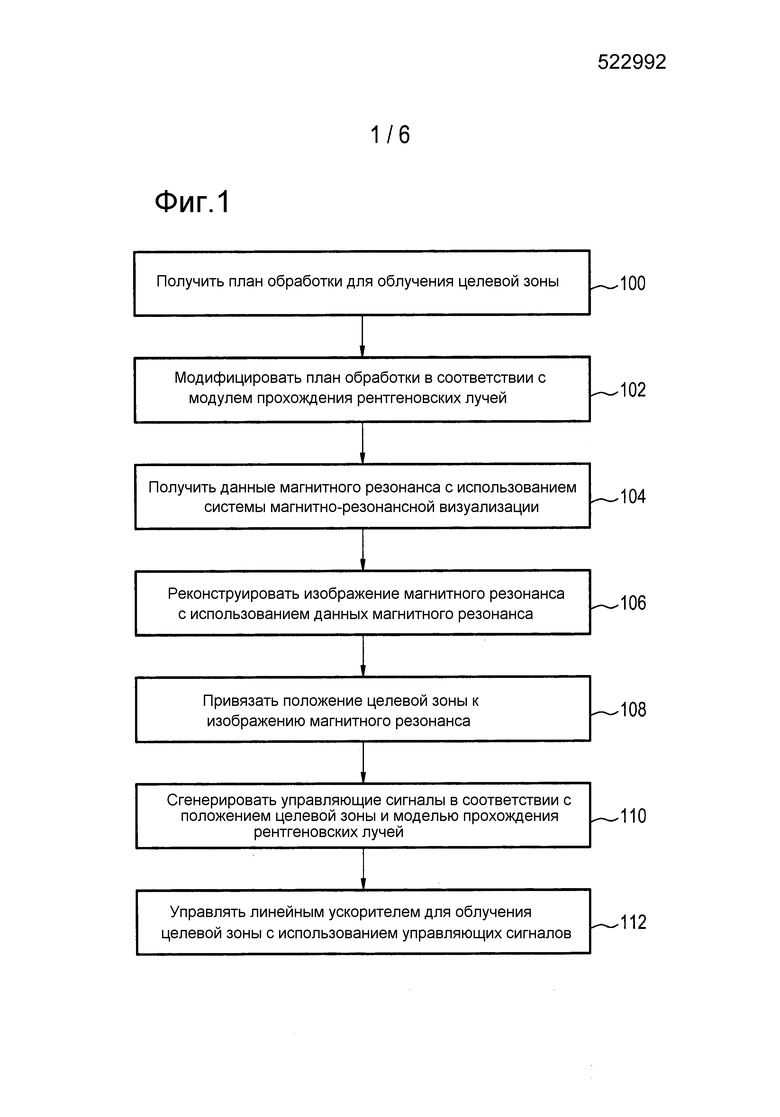
Фиг. 1 показывает блок-схему, которая иллюстрирует способ в соответствии с одним вариантом осуществления настоящего изобретения;
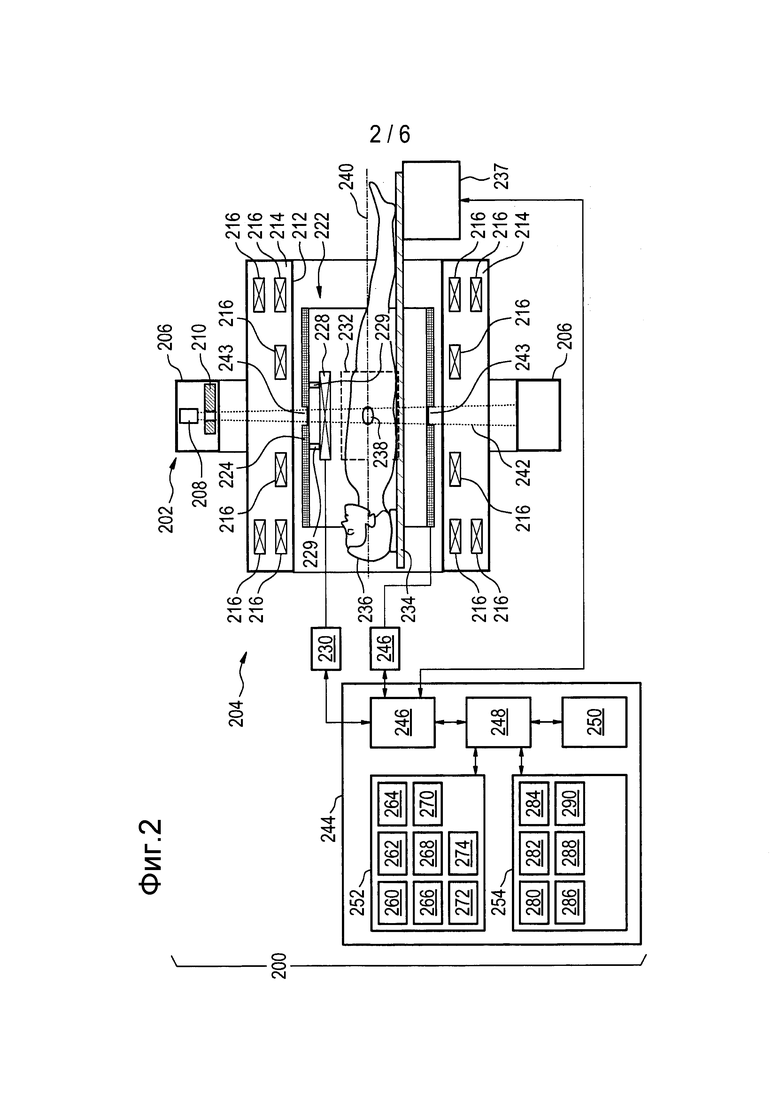
Фиг. 2 иллюстрирует медицинский инструмент в соответствии с одним вариантом осуществления настоящего изобретения;
Фиг. 3 иллюстрирует медицинский инструмент в соответствии с дополнительным вариантом осуществления настоящего изобретения;
Фиг. 4 иллюстрирует медицинский инструмент в соответствии с дополнительным вариантом осуществления настоящего изобретения;
Фиг. 5 показывает идеализированное медицинское устройство с задней катушкой, расположенной ниже опоры для субъекта;
Фиг. 6 показывает идеализированное медицинское устройство с фиксированной передней катушкой, смонтированной над опорой для субъекта;
Фиг. 7 показывает идеализированное медицинское устройство с системной передающей и/или приемной катушкой внутри отверстия магнита;
Фиг. 8 показывает идеализированное медицинское устройство с системной передающей и/или приемной катушкой с модифицированной задней частью в отверстии магнита; и
Фиг. 9 показывает один вариант осуществления кабеля с восприятием формы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Одинаково пронумерованные элементы на этих чертежах представляют собой либо эквивалентные элементы, либо элементы, выполняющие ту же самую функцию. Элементы, которые были обсуждены ранее, не обязательно будут обсуждаться на последующих чертежах, если их функция является эквивалентной.
Фиг. 1 показывает блок-схему, которая иллюстрирует способ в соответствии с одним вариантом осуществления настоящего изобретения. В блоке 100 получается план обработки, который описывает, как облучать целевую зону. Затем на стадии 102 план обработки модифицируется в соответствии с моделью прохождения рентгеновских лучей через оборудование. Затем на стадии 104 получаются данные магнитного резонанса с использованием системы магнитно-резонансной томографии. На стадии 106 изображение магнитного резонанса реконструируется из данных магнитного резонанса. Затем на стадии 108 расположение целевой зоны привязывается к изображению магнитного резонанса. На стадии 110 генерируются управляющие сигналы в соответствии с расположением целевой зоны и моделью прохождения рентгеновских лучей для управления линейным ускорителем. Наконец, на стадии 112 управление линейным ускорителем с использованием управляющих сигналов осуществляется так, чтобы облучить целевую зону.
Фиг. 2 показывает один вариант осуществления медицинского устройства 200 в соответствии с настоящим изобретением. Медицинское устройство 200 включает в себя линейный ускоритель 202 и систему 204 магнитно-резонансной томографии. Линейный ускоритель 402 включает в себя гентри 206 и рентгеновский источник 208. Гентри 206 предназначен для вращения рентгеновского источника 208 вокруг оси 240 вращения гентри. Рядом с рентгеновским источником 208 находится настраиваемый коллиматор 210. Настраиваемый коллиматор 210 может иметь, например, настраиваемые пластины для настройки профиля луча рентгеновского источника 208. Настраиваемый коллиматор может быть, например, мультилистовым коллиматором. Система 204 магнитно-резонансной томографии включает в себя магнит 212.
Также возможно использовать постоянные или резистивные магниты. Также возможно использование различных типов магнитов, например, также возможно использовать как разделенный цилиндрический магнит, так и так называемый открытый магнит. Разделенный цилиндрический магнит подобен стандартному цилиндрическому магниту за исключением того, что криостат разделен на две секции, чтобы предоставить доступ к изо-плоскости магнита, такие магниты могут использоваться, например, совместно с лучевой терапией заряженными частицами. Открытый магнит имеет две секции магнита, одна выше другой с промежутком между ними, который является достаточно большим, чтобы принять субъекта: устройство этих двух секций аналогично устройству катушки Гельмгольца. Открытые магниты являются популярными, потому что они меньше ограничивают субъекта. Внутри криостата цилиндрического магнита имеется набор сверхпроводящих катушек. Магнит 212, показанный в этом варианте осуществления, является стандартным цилиндрическим магнитом со сверхпроводящей обмоткой. Магнит 212 имеет криостат 214 с находящимися в нем сверхпроводящими катушками 216. У магнита 412 есть отверстие 422. Внутри отверстия 222 цилиндрического магнита 212 находится зона визуализации, где магнитное поле является сильным и достаточно однородным для того, чтобы выполнить магнитно-резонансную томографию.
Внутри отверстия 222 магнита 212 расположена катушка 224 градиента магнитного поля для получения данных магнитного резонанса с тем, чтобы пространственно закодировать магнитные спины внутри зоны визуализации магнита. Катушка 224 градиентного магнитного поля соединяется с электропитанием 226 катушки градиентного магнитного поля. Катушка 224 градиентного магнитного поля является представительной, и для того, чтобы позволить излучению проходить без ослабления, она обычно будет иметь конструкцию разделенной катушки. Обычно катушки градиентного магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Электропитание 226 катушки градиентного магнитного поля обеспечивает ток для катушек градиентного магнитного поля. Ток, подаваемый к катушкам магнитного поля, управляется как функция времени и может быть плавно изменяемым или пульсирующим.
Имеется радиочастотная катушка 228, соединенная с приемопередатчиком 230. Радиочастотная катушка 228 находится рядом с зоной визуализации 232 магнита 212. У зоны 232 визуализации есть область высокого магнитного поля и однородности, которая достаточна для выполнения магнитно-резонансной томографии. Радиочастотная катушка 228 может служить для манипулирования ориентацией магнитных спинов в зоне визуализации, а также для приема радиосигналов от спинов также в зоне визуализации. Радиочастотная катушка 228 может также упоминаться как антенна или канал. Радиочастотная катушка 228 может содержать несколько элементов катушки. Радиочастотная антенна также может упоминаться как канал.
Радиочастотная катушка 228 и приемопередатчик 230 радиочастоты может быть заменен раздельными катушками передачи и приема и раздельными передатчиком и приемником. Понятно, что радиочастотная катушка и приемопередатчик радиочастоты являются просто представительными. Радиочастотная антенна предназначена также для представления выделенной передающей антенны и выделенной приемной антенны. Аналогичным образом приемопередатчик также может представлять раздельные передатчик и приемник.
Также внутри отверстия магнита 222 находится опора 234 субъекта для поддержания субъекта 236. Опора 234 субъекта может позиционироваться механической системой 237 позиционирования. Внутри субъекта 236 находится целевая зона 238. Ось 240 вращения гентри в этом конкретном варианте осуществления является коаксиальной с осью цилиндрического магнита 212. Опора 234 субъекта располагается так, что целевая зона 238 лежит на оси 240 вращения гентри. Рентгеновский источник 208 показан как генерирующий луч 242 излучения, который проходит через коллиматор 210 и через целевую зону 238. По мере того, как источник 208 излучения вращается вокруг оси 240, целевая зона 238 будет всегда находиться в фокусе луча 242 излучения. Луч 242 излучения проходит через криостат 214 магнита. Катушка 224 градиентного магнитного поля имеет зазор 243, который разделяет катушку градиентного магнитного поля на две секции. Зазор 243 уменьшает ослабление луча 242 излучения катушкой 224 градиентного магнитного поля. В альтернативном варианте осуществления разделенная или открытая конструкция магнита используется для уменьшения ослабления рентгеновского луча магнитом 212.
Радиочастотная катушка 228 присоединена к внутренней поверхности отверстия магнита 222 несколькими креплениями 229. В некоторых вариантах осуществления крепления 229 могут включать в себя механизм, который позволяет поднимать и опускать радиочастотную катушку 228. В любом случае крепления 229 определяют расположение радиочастотной катушки 228 относительно магнита 212.
Приемопередатчик 230, электропитание 226 катушки градиентного магнитного поля и механическая система 237 позиционирования показаны как соединенные с аппаратным интерфейсом 246 компьютерной системы 244. Компьютерная система 244 показана как дополнительно включающая в себя процессор 248 для выполнения исполнимых машиной инструкций и для того, чтобы управлять работой и функциями медицинского устройства. Аппаратный интерфейс 246 позволяет процессору 248 взаимодействовать с медицинским устройством 200 и управлять им. Процессор 248 показан, как дополнительно соединенный с пользовательским интерфейсом 250, компьютерным устройством 252 хранения данных и компьютерной памятью 254.
Компьютерное устройство 252 хранения данных показано как содержащее план 260 обработки. Компьютерное устройство 252 хранения данных далее показано как содержащее модель 262 прохождения рентгеновских лучей радиочастотной катушки 228. Модель 262 прохождения рентгеновских лучей может включать в себя расположение чувствительных компонентов радиочастотной катушки 228, а также свойства прохождения рентгеновских лучей радиочастотной катушки 228. Компьютерное устройство 252 хранения данных далее показано как содержащее последовательность 264 импульсов. Использующийся в настоящем документе термин «последовательность импульсов» означает набор команд, используемых для того, чтобы управлять различными компонентами системы 204 магнитно-резонансной томографии для получения данных 266 магнитного резонанса. Компьютерное устройство 252 хранения данных показано как содержащее данные 266 магнитного резонанса, которые были получены с использованием системы 204 магнитно-резонансной томографии.
Компьютерное устройство 252 хранения данных далее показано как содержащее изображение 268 магнитного резонанса, которое было реконструировано из данных 266 магнитного резонанса. Компьютерное устройство 252 хранения данных далее показано как содержащее привязку 270 изображения 268 магнитного резонанса. Привязка 270 изображения регистрирует расположение изображения относительно системы 204 магнитно-резонансной томографии и линейного ускорителя 202. Компьютерное устройство 252 хранения данных далее показано как содержащее положение 272 целевой зоны 238. Это расположение было идентифицировано в изображении 268 магнитного резонанса. Компьютерное устройство 252 хранения данных далее показано как содержащее управляющие сигналы 274. Управляющие сигналы 274 являются управляющими сигналами, которые используются для управления линейным ускорителем 202 с тем, чтобы облучить целевую зону 238.
Компьютерная память показана как содержащая управляющий модуль 280. Управляющий модуль содержит исполнимый компьютером код, который позволяет процессору 248 управлять работой и функциями медицинского устройства 200. Например, управляющий модуль 280 может использовать последовательность 264 импульсов для того, чтобы получить данные 266 магнитного резонанса. Управляющий модуль 280 может также использовать управляющие сигналы 274 для того, чтобы управлять линейным ускорителем 202. Компьютерная память 254 далее показана как содержащая модуль 282 модификации плана обработки. Модуль 282 модификации плана обработки модифицирует план 260 обработки, используя информацию, содержащуюся в модели 262 прохождения рентгеновских лучей. Компьютерная память 254 показана как дополнительно содержащая модуль 284 реконструкции изображения. Модуль 284 реконструкции изображения содержит код, который позволяет процессору 248 реконструировать изображение 268 магнитного резонанса из данных 266 магнитного резонанса.
Компьютерная память 254 показана как дополнительно содержащая модуль 286 привязки изображения. Модуль 286 привязки изображения содержит код, который позволяет процессору 248 сгенерировать привязку 270 изображения в положении 272 целевой зоны с использованием изображения 268 магнитного резонанса. Компьютерная память 254 показана как дополнительно содержащая модуль 288 определения места целевой зоны. Модуль 288 определения места целевой зоны содержит код, который позволяет процессору 248 сгенерировать положение 272 целевой зоны с использованием привязки 270 изображения. Компьютерная память 254 далее показана как содержащая модуль 290 генерирования управляющего сигнала. Модуль 290 генерирования управляющего сигнала содержит код, который позволяет процессору 248 сгенерировать управляющие сигналы 274 из плана 260 обработки и положения 272 целевой зоны. План 260 обработки используется после того, как он был модифицирован в соответствии с модулем прохождения рентгеновских лучей.
Фиг. 3 показывает медицинский инструмент в соответствии с дополнительным вариантом осуществления настоящего изобретения. Вариант осуществления, показанный на Фиг. 3, является аналогичным варианту осуществления, показанному на Фиг. 2, за тем исключением, что радиочастотная катушка 328 в этом варианте осуществления не монтируется и не фиксируется в отверстии 222 магнита 212. Вместо этого у радиочастотной катушки 328 есть несколько координатных отметок 330. Радиочастотная катушка 328 и по меньшей мере координатные метки 330 располагается внутри зоны 232 визуализации. В этом варианте осуществления модуль 286 привязки изображения используется для обнаружения расположения координатных меток 330 в изображении 268 магнитного резонанса для того, чтобы сгенерировать положения 360 оборудования, которые сохраняются в компьютерном устройстве 252 хранения данных. В этом варианте осуществления модуль 290 генерирования управляющего сигнала дополнительно использует положения 360 оборудования.
В обычной радиотерапии структура излучения планируется на основе стационарных изображений, показывающих анатомию пациента, включая целевую область терапии. Терапия выполняется в предположении, что анатомия пациента соответствует ситуации во время визуализации планирования, которая обычно осуществляется раньше, чем выполнение терапии. Человеческая анатомия зачастую не является стационарной, и поэтому дополнительные поля добавляются к терапии так, чтобы целевая область была покрыта в достаточной степени. Это увеличивает дозу облучения здоровой ткани. Одним способом более точного назначения дозы является выполнение радиотерапии с наведением по изображению (IMRT).
Во многих случаях визуализация или терапия требуют, чтобы в объеме, через который проходит излучение, находилось оборудование. Примером такого оборудования является анатомически специфичная приемная катушка, используемая в магнитно-резонансной визуализации. Эти катушки предпочтительно располагаются близко к отображаемой / отслеживаемой анатомии для того, чтобы обеспечить достаточное качество изображения. Расположение катушки обычно изменяется от пациента к пациенту и от одного сеанса терапии к другому. Оборудование может быть чувствительным к излучению и/или может оказывать влияние на излучение. Таким образом, полезно знать расположение влияющих на излучение деталей с тем, чтобы принять их во внимание в терапии. Настоящее изобретение предлагает решение, как отслеживать расположение такого оборудования и принимать его во внимание при радиотерапии, наводимой по изображению.
На Фиг. 3 радиочастотная катушка 228 или другое оборудование имеет одну или более координатных меток 330. Эти метки отображаются, и их положение оценивается. На основе положений координатных меток 330 и модели прохождения рентгеновских лучей положение всего оборудования вычисляется относительно координат изображения и координат терапии. Информация о расположении оборудования используется для корректировки терапии. Такие корректировки могут включать в себя:
- регулировку направления луча и положения источника излучения так, чтобы чувствительная часть оборудования не подвергалась воздействию излучения;
- регулировку дозы и направления облучения так, чтобы эффект определенного положения оборудования и его интерференции с лучом излучения был компенсирован;
- инструктирование пользователя об изменении положения оборудования или пациента так, чтобы интерференция оборудования с лучом излучения была уменьшена, а выполнение терапии было оптимизировано;
- автоматическое (например, с использованием моторизованного позиционирования стола) перепозиционирование оборудования или пациента так, чтобы интерференция оборудования с лучом излучения была уменьшена; и
- обнаружение может быть обнаружением в реальном времени для того, чтобы учесть расположение оборудования во время терапии и скорректировать выполнение терапии на основе расположения оборудования.
Реализация варианта осуществления, изображенного на Фиг. 3, может иметь одну или более из следующих особенностей:
1. Оборудование или радиочастотная катушка имеет координатные метки, которые являются видимыми для системы визуализации
а. Имеется достаточно координатных меток для того, чтобы определить положение, ориентацию и форму оборудования по отношению к координатам визуализации
i. Единственной точки координатной метки может быть достаточно, если ориентация оборудования фиксирована по отношению к системе визуализации.
ii. Двухточечной координатной метки или одной координатной линии достаточно для определения положения и ориентации цилиндрического симметричного оборудования или оборудования, которое имеет одно зафиксированное вращение.
iii. Трехточечной координатной метки или одной координатной метки с подходящей трехмерной формой достаточно для определения трех координат положения и трех координат ориентации оборудования
iv. Может существовать больше координатных меток для того, чтобы обеспечить определение изменения формы нежесткого оборудования, или сделать обнаружение положения и ориентации более устойчивыми, или расширить отслеживаемость для покрытия большей области (то есть гарантировать, что достаточное количество координатных меток находится в поле зрения системы визуализации).
b. координатные метки могут быть пассивными, то есть, представлять собой материалы, которые являются лишь видимыми для используемого режима визуализации.
i. В случае магнитно-резонансной визуализации координатные метки могут быть, например, капсулами, заполненными подходящим видимым для магнитно-резонансной томографии материалом. Обнаруживаемое ядро может быть ядром 1H или другим чувствительным к магнитному резонансу ядром.
с. Координатные метки могут быть активными, то есть такими, которые являются видимыми только тогда, когда они активированы.
i. В случае магнитно-резонансной визуализации активный маркер может быть маркером, который окружен выделенной катушкой координатного маркера.
2. Устройство визуализации сканирует изображения, которые могут использоваться для того, чтобы определить положение оборудования
а. Последовательность визуализации может быть трехмерной, показывающей все координатные метки отдельно
b. Последовательность визуализации может быть двухмерной с множеством срезов, показывающих все координатные метки отдельно
с. Последовательность визуализации может состоять из множества двухмерных проекций, из которых идентифицируются положения координатных меток
d. Последовательность визуализации может состоять из множества одномерных проекций, из которых идентифицируются положения координатных меток
е. Режимом визуализации может быть магнитно-резонансная томография.
3. Управляющее программное обеспечение имеет модель оборудования, которая включает в себя
а. информацию о положении координатных меток
b. информацию о геометрической форме оборудования
c. информацию о влиянии различных частей оборудования на излучение (например, о пространственном затухании)
d. информацию о чувствительности к излучению различных частей оборудования
4. Управляющее программное обеспечение оценивает положение оборудования из информации об изображении относительно направления луча радиотерапии, и на основе этой информации оно может
а. выключать или уменьшать излучение, если оно проходит через область оборудования, которое чувствительно к излучению
b. вычислять ослабление луча оборудованием и
i. либо увеличивать излучение с тем, чтобы скомпенсировать эффект ослабления излучения,
ii. либо учитывать ослабление излучения при оценке конечных доз облучения в различных частях анатомии
с. инструктировать пользователя перепозиционировать оборудование или пациента так, чтобы оно не мешало запланированной радиотерапии, или так, чтобы его влияние на терапию было минимальным.
i. Альтернативно система может осуществлять перепозиционирование автоматически, например, с использованием моторизованной кушетки
d. Обнаружение может быть повторено для того, чтобы отследить изменения в расположении оборудования, в частности когда положение оборудования зависит от положения пациента.
i. Повторение трассировки оборудования может осуществляться в реальном времени для сравнения с ожидаемым движением так, чтобы вышеупомянутые корректировки могли быть сделаны «на лету».
Фиг. 4 показывает дополнительный вариант осуществления медицинского устройства 400 в соответствии с одним вариантом осуществления настоящего изобретения. Показанный на Фиг. 4 вариант осуществления является аналогичным вариантам осуществления, показанным на Фиг. 2 и 3, за исключением того, что в этом варианте осуществления положение радиочастотной катушки или оборудования 428 определяется механическим или оптическим устройством измерения положения, таким как позиционный потенциометр или волокно 430 с восприятием формы. Устройством измерения положения соединено с электроникой 432 устройства измерения положения. Например, электроника 432 волокна с восприятием формы может содержать лазер для использования с градиентами Брэгговской дифракции в пределах волокна 430 с восприятием формы. Между приемопередатчиком 230 и радиочастотной катушкой 428 имеется радиочастотный кабель 434. Устройство 430 измерения положения может быть присоединено к радиочастотному кабелю 434. Таким образом становится известно положение радиочастотного кабеля 434 и, следовательно, положение и ориентация радиочастотной катушки 428. Устройство 430 измерения положения может быть присоединено к оборудованию напрямую 428. Электроника 432 волокна с восприятием формы показана как соединенная с аппаратным интерфейсом 246. Устройство 432 измерения положения обеспечивает компьютерную систему кабельным путем 460. Кабельный путь 460 показан как хранимый в компьютерном устройстве 252 хранения данных. В этом варианте осуществления модуль 290 генерирования управляющего сигнала использует кабельный путь 460 для того, чтобы определить положение оборудования 428 относительно системы 222 магнитно-резонансной томографии и линейного ускорителя 202.
Варианты осуществления настоящего изобретения могут обеспечить способ уменьшения количества степеней свободы для того, чтобы облегчить проектирование катушки и увеличить срок службы катушки. Они могут также облегчить вычисления ослабления излучения, необходимые для калибровки системы для лечения.
Варианты осуществления настоящего изобретения могут решить одну или больше из следующих проблем:
- Уменьшенный срок службы радиочастотных катушек
- Трудности в определении ослабления излучения системы линейного ускорителя, вызываемого радиочастотной катушкой. Это необходимо для (обратного) вычисления дозы облучения.
- Трудности с проектированием катушки
- Трудности с размещением катушки
- Пространственные ограничения для пациента
Варианты осуществления настоящего изобретения могут включать в себя одну или больше из следующих особенностей, относящихся к радиочастотным катушкам, расположенным в фиксированной позиции относительно системы линейного ускорителя так, что:
а. Часть катушки, которая подвергается воздействию излучения (окна излучения) оптимизируется по критерию срока ее службы. Это может быть сделано, например, путем удаления электроники катушки, чувствительной к излучению, как можно дальше от окна излучения. Детали, находящиеся за пределами окна излучения, не нужно проектировать так, чтобы они были нечувствительными к лучам излучения.
b. Катушка все еще находится близко к пациенту для оптимального приема (или передачи)
с. Катушка минимизируется по толщине, чтобы занимать как можно меньше пространства в отверстии
При наличии фиксированного положения по отношению к системе линейного ускорителя ослабление излучения линейного ускорителя должно быть известным в любой момент времени. Это облегчает (обратное) вычисление правильной дозы для лучевой терапии. Фиг. 5-8 иллюстрируют несколько вариантов осуществления, в которых положение радиочастотной катушки является фиксированным относительно положения системы линейного ускорителя.
Фиг. 5 показывает вид сзади 500 и вид сбоку 502 идеализированного медицинского устройства. Опора 234 субъекта для поддержания субъекта 236 является видимой. Ниже опоры 234 субъекта находится задняя катушка 504 с фиксированным расположением в пределах отверстия 222 медицинского устройства 500, 502. Вид сбоку 502 показывает окно 506 излучения или область, где излучение вводит в отверстие 222. Область, помеченная как 508, представляет собой область фиксированной задней катушки 504, которая подвергается воздействию излучения.
Фиг. 6 показывает вид сзади идеализированного медицинского устройства. Субъект 236 поддерживается опорой 234 субъекта. В этом случае имеется фиксированная передняя катушка 602, смонтированная над субъектом 236 с использованием нескольких креплений 229.
Фиг. 7 показывает вид сзади 700 и вид сбоку 702 идеализированного медицинского устройства. В этом варианте осуществления имеется системная передающая и/или приемная катушка 704 внутри отверстия 222.
Фиг. 8 показывает вид сзади 800 и вид сбоку 802 идеализированного медицинского устройства. В этом варианте осуществления имеется системная передающая и/или приемная катушка 804 внутри отверстия 222. Однако в этом варианте осуществления имеется модифицированная задняя часть 806. Задняя катушка включается в системную передающую и/или приемную катушку 804.
В линейных ускорителях с магнитно-резонансным наведением луч излучения может проходить через катушки и поддерживающие устройства (например, дыхательные или сердечные устройства) и их кабельные соединения. Эти предметы должны быть расположены свободно и вблизи от обрабатываемого объема. Для этого необходимы гибкие кабели.
Гибкие кабели могут ослаблять рентгеновский луч непредсказуемыми способами. Ослабление излучения приводит к неравномерности доз облучения в целевом объеме и/или может повредить сами кабели и устройства.
Помещение оптического катетера с восприятием формы внутрь/на кабели и/или устройство может использоваться для оценки положения кабеля и устройства с хорошей точностью. Оптическая электроника может быть расположена вне луча и системы координат позиционирования, будучи прикрепленной к априорно известному положению в системе координат линейного ускорителя.
Информация о положении может использоваться при планировании дозы с известным ослаблением излучения кабелем/устройством, так что форма и мощность луча могут быть скорректированы для того, чтобы принять во внимание блокирующие предметы либо избежать облучения чувствительных деталей устройства.
Другой вариант осуществления использует данные о положении для того, чтобы избежать облучения кабелей в целом, предотвращая облучение под углами, при которых облучение попало бы на кабельные соединения или устройство.
Самым простым случаем является замена кабельного сердечника оптическим датчиком для локализации кабеля, проиллюстрированная на Фиг. 9. Фиг. 9 показывает один вариант осуществления кабеля 900 с восприятием формы в соответствии с настоящим изобретением. Этот кабель имеет тело 902 кабеля. Внутри тела 902 кабеля находится встроенное волокно 904 с восприятием формы. Вокруг волокна 904 с восприятием формы имеется несколько проводов 906. Это может использоваться, например, для кабеля между радиочастотной антенной и приемопередатчиком. В других вариантах осуществления точное положение волокна 904 с восприятием формы относительно проводов 906 может быть другим. Например, волокно 904 с восприятием формы может быть нанесено на наружную поверхность кабеля 900. Также может быть больше или меньше проводов 906, а также провода 906 могут быть заменены такими вещами, как трубки для передачи текучих сред или жидкостей и/или волоконно-оптические кабели.
В то время как настоящее изобретение было подробно проиллюстрировано и описано в чертежах и предшествующем описании, такую иллюстрацию и описание следует считать иллюстративными или примерными, а не ограничивающими; настоящее изобретение не ограничено раскрытыми вариантами осуществления.
Другие вариации раскрытых вариантов осуществления могут быть поняты и сделаны при осуществлении заявленного изобретения специалистами в данной области техники на основе изучения чертежей, описания и приложенной формулы изобретения. В формуле изобретения слова «включающий в себя» не исключают других элементов или этапов, а неопределенный артикль «а» или «аn» не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот факт, что определенные величины приведены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих величин не может быть использована для получения выгоды. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другими аппаратными средствами или как их часть, но также может распространяться в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие объем настоящего изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
200 - медицинское устройство;
202 - линейный ускоритель;
204 - система магнитно-резонансной томографии;
206 - гентри;
208 - рентгеновский источник;
210 - настраиваемый коллиматор;
212 - магнит;
214 - криостат;
216 - сверхпроводящая катушка;
222 - отверстие;
224 - катушка градиентного магнитного поля;
226 - электропитание катушки градиентного магнитного поля;
228 - радиочастотная катушка;
229 - крепление;
230 - приемопередатчик;
232 - зона визуализации;
234 - опора субъекта;
236 - субъект;
237 - механическая система позиционирования;
238 - целевая зона;
240 - ось вращения гентри;
242 - луч излучения;
443 - зазор;
244 - компьютерная система;
246 - аппаратный интерфейс;
248 - процессор;
250 - пользовательский интерфейс;
252 - компьютерное устройство хранения данных;
254 - компьютерная память;
260 - план обработки;
262 - модель прохождения рентгеновских лучей;
264 - последовательность импульсов;
266 - данные магнитного резонанса;
268 - изображение магнитного резонанса;
270 - привязка изображения;
272 - положение целевой зоны;
274 - управляющие сигналы;
280 - управляющий модуль;
282 - модуль модификации плана обработки;
284 - модуль реконструкции изображения;
286 - модуль привязки изображения;
288 - модуль определения положения целевой зоны;
290 - модуль генерирования управляющего сигнала;
300 - медицинское устройство;
328 - радиочастотная катушка;
330 - координатная метка;
360 - расположение оборудования;
400 - медицинское устройство;
428 - радиочастотная катушка;
430 - волокно с восприятием формы;
432 - электроника волокна с восприятием формы;
434 - радиочастотный кабель;
460 - путь кабеля;
500 - вид сзади медицинского устройства;
502 - вид сбоку медицинского устройства;
504 - фиксированная задняя катушка;
506 - окно облучения;
508 - облучаемая область;
600 - вид сзади медицинского устройства;
602 - фиксированная передняя катушка;
700 - вид сзади медицинского устройства;
702 - вид сбоку медицинского устройства;
704 - системная передающая и/или приемная катушка;
800 - вид сзади медицинского устройства;
802 - вид сбоку медицинского устройства;
804 - системная передающая и/или приемная катушка;
806 - задняя часть;
900 - кабель;
902 - тело кабеля;
904 - волокно с восприятием формы;
906 – провод.




Использование: для радиотерапии, использующей магнитно-резонансное изображение. Сущность изобретения заключается в том, что настоящее изобретение предлагает медицинский инструмент, содержащий линейный ускоритель, наводимый системой магнитно-резонансной томографии. Выполнение процессором инструкций для управления медицинским инструментом побуждает процессор: получать план обработки для облучения целевой зоны; модифицировать план обработки в соответствии с моделью прохождения рентгеновских лучей через оборудование; получать данные магнитного резонанса, используя систему магнитно-резонансной томографии; реконструировать изображение магнитного резонанса из данных магнитного резонанса; привязывать положение целевой зоны к изображению магнитного резонанса; генерировать управляющие сигналы в соответствии с положением целевой зоны и моделью прохождения рентгеновских лучей; и управлять линейным ускорителем, чтобы облучить целевую зону, используя управляющие сигналы. Технический результат: обеспечение возможности отслеживания расположения оборудования, влияющего на излучение, с тем, чтобы принимать его во внимание при радиотерапии, наводимой по изображению. 2 н. и 13 з.п. ф-лы, 9 ил.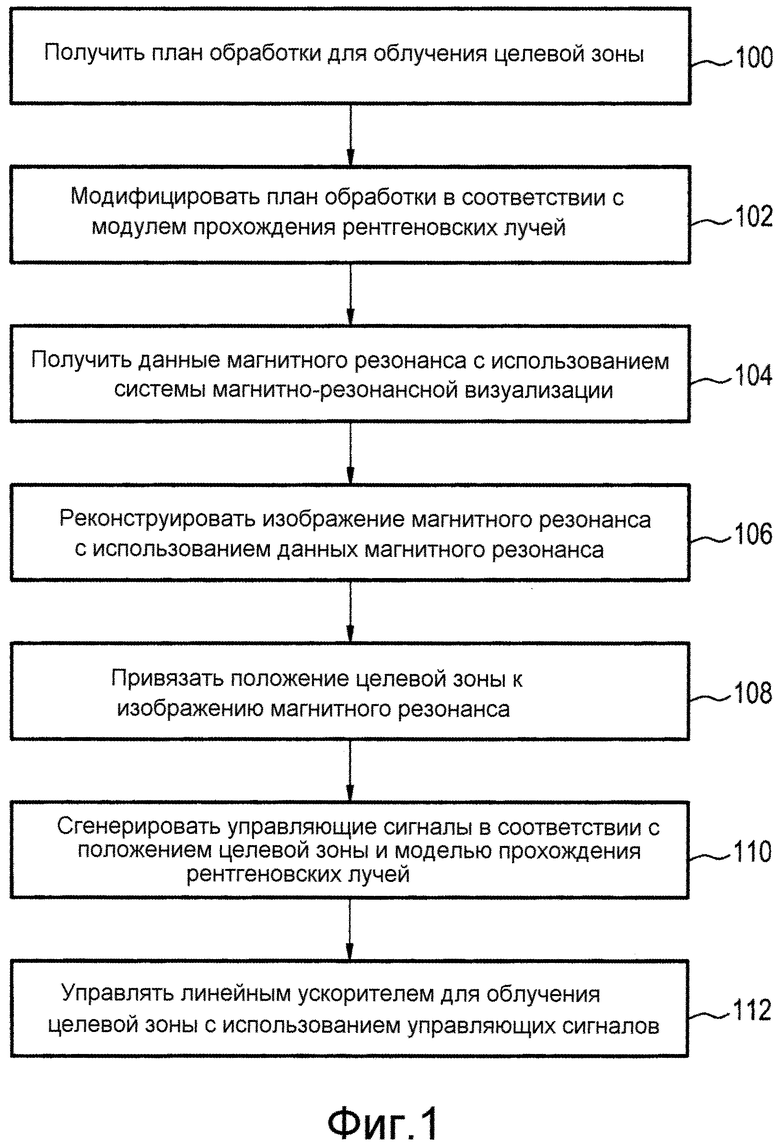
1. Медицинский инструмент (200, 300, 400, 500, 502, 600, 700, 702, 800, 802), содержащий:
- линейный ускоритель (202) с рентгеновским источником (208) для направления рентгеновского излучения (242) на целевую зону (238), причем линейный ускоритель выполнен с возможностью вращения рентгеновского источника вокруг оси (240) вращения,
- систему (204) магнитно-резонансной томографии для получения данных (266) магнитного резонанса с помощью радиочастотной катушки (228, 328, 428, 504, 602, 704, 804) из зоны (232) визуализации, причем целевая зона находится в зоне визуализации, причем система магнитно-резонансной томографии содержит магнит (212) для генерирования магнитного поля в зоне визуализации, причем рентгеновский источник выполнен с возможностью вращения, по меньшей мере частично, вокруг магнита;
- процессор (248) для управления медицинским инструментом;
- память (254) для сохранения модели (262) прохождения рентгеновского излучения через оборудование, а также для сохранения машинно-исполняемых инструкций (280, 282, 284, 286, 288, 290) для выполнения процессором, причем выполнение инструкций побуждает процессор:
- получать (100) план (260) обработки для облучения целевой зоны;
- модифицировать (102) план обработки в соответствии с моделью прохождения рентгеновских лучей;
- получать (104) данные магнитного резонанса, используя систему магнитно-резонансной томографии;
- реконструировать (106) изображение (268) магнитного резонанса из данных магнитного резонанса;
- определять положение (272) целевой зоны на изображении магнитного резонанса;
- генерировать (110) управляющие сигналы (274) в соответствии с положением целевой зоны и моделью прохождения рентгеновских лучей; и
- управлять (112) линейным ускорителем, чтобы облучить
целевую зону, используя управляющие сигналы.
2. Медицинский инструмент по п. 1, в котором оборудование представляет собой радиочастотную катушку, причем радиочастотная катушка присоединена к системе магнитно-резонансной томографии с заданной геометрией, причем управляющие сигналы генерируются с использованием упомянутой заданной геометрии.
3. Медицинский инструмент по п. 2, в котором радиочастотная катушка содержит первую катушку под опорой для субъекта.
4. Медицинский инструмент по п. 2 или 3, в котором радиочастотная катушка содержит вторую катушку, закрепленную над опорой для субъекта.
5. Медицинский инструмент по п. 4, в котором передняя катушка содержит механизм корректировки высоты для того, чтобы корректировать высоту передней катушки относительно субъекта.
6. Медицинский инструмент по п. 2, в котором радиочастотная катушка содержит фиксированную системную катушку.
7. Медицинский инструмент по п. 2, в котором радиочастотная катушка содержит фиксированную системную катушку с адаптированной частью для задней катушки.
8. Медицинский инструмент по п. 1, в котором оборудование представляет собой любое одно из следующего: радиочастотная катушка, передающая катушка и/или приемная катушка, маска, дыхательная трубка, датчик, опора для пациента, крепежный элемент, электрод и наушники.
9. Медицинский инструмент по п. 1 или 8, в котором оборудование выполнено с возможностью присоединения к субъекту.
10. Медицинский инструмент по п. 9, в котором оборудование содержит магнитно-резонансные координатные метки, причем выполнение инструкций дополнительно побуждает процессор идентифицировать положение оборудования в изображении магнитного резонанса, причем управляющие сигналы генерируются, по меньшей мере частично, с использованием положения оборудования.
11. Медицинский инструмент по п. 10, в котором оборудование содержит устройство измерения положения, причем выполнение инструкций дополнительно побуждает процессор идентифицировать положение оборудования и/или определять путь кабеля с использованием устройства измерения положения, причем управляющие сигналы генерируются, по меньшей мере частично, с использованием положения оборудования.
12. Медицинский инструмент по п. 11, в котором устройство измерения положения представляет собой волокно с восприятием формы, содержащее наконечник, причем наконечник имеет заданную ориентацию относительно радиочастотной катушки, и причем управляющие сигналы генерируются, по меньшей мере частично, с использованием пути кабеля и заданной ориентации.
13. Медицинский инструмент по п. 1, в котором управляющие сигналы используются для того, чтобы побудить рентгеновский источник избегать критических компонентов оборудования.
14. Медицинский инструмент по п. 1, в котором управляющие сигналы используются для того, чтобы побудить рентгеновский источник компенсировать ослабление оборудованием излучения путем управления дозой и направлением излучения.
15. Машиночитаемый носитель, содержащий машинно-исполняемые инструкции (228, 328, 428, 504, 602, 704, 804) для выполнения процессором (248), управляющим медицинским инструментом (200, 300, 400, 500, 502, 600, 700, 702, 800, 802), и модель (262) прохождения рентгеновских лучей через радиочастотную катушку, в котором медицинский инструмент содержит линейный ускоритель (202) с рентгеновским источником (208) для направления рентгеновского излучения (242) на целевую зону (238), причем линейный ускоритель выполнен с возможностью вращения рентгеновского источника вокруг центра вращения, причем медицинский инструмент дополнительно содержит систему (204) магнитно-резонансной томографии для получения данных магнитного резонанса с помощью радиочастотной катушки из зоны (232) визуализации, причем целевая зона находится в зоне визуализации, причем система магнитно-резонансной томографии содержит магнит (212) для генерирования магнитного поля в зоне визуализации, причем рентгеновский источник выполнен с возможностью вращения, по меньшей мере частично, вокруг магнита, при этом выполнение инструкций побуждает процессор:
- получать (100) план (260) обработки для облучения целевой
зоны;
- модифицировать (102) план обработки в соответствии с моделью прохождения рентгеновских лучей;
- получать (104) данные магнитного резонанса, используя систему магнитно-резонансной томографии;
- реконструировать (106) изображение (268) магнитного резонанса из данных магнитного резонанса;
- определять положение (272) целевой зоны на изображении магнитного резонанса;
- генерировать (110) управляющие сигналы (274) в соответствии с положением целевой зоны и моделью прохождения рентгеновских лучей; и
- управлять (112) линейным ускорителем, чтобы облучать целевую зону, используя управляющие сигналы.
| WO 2004024235 A1, 25.03.2004 | |||
| WO 2012063162 A1, 18.05.2012 | |||
| US 2010239066 A1, 23.09.2010 | |||
| US 20110260729 A1, 27.10.2011 | |||
| СПОСОБ СТЕРЕОТАКСИЧЕСКОГО НАВЕДЕНИЯ УЗКОГО ФОТОННОГО ПУЧКА НА ЦЕЛЕВУЮ ТОЧКУ ГОЛОВНОГО МОЗГА | 2004 |
|
RU2257177C1 |

