Область техники, к которой относится изобретение
Изобретение относится к магнитно-резонансной визуализации (или томографии), в частности - к контролю магнитно-резонансной визуализации с помощью радара.
Уровень техники
Сканеры магнитно-резонансной визуализации (или магнитно-резонансной томографии (МРТ)) используют большое статическое магнитное поле для выравнивания ядерных спинов атомов в рамках процедуры получения изображений внутри тела пациента. С помощью МРТ можно пространственно измерить различные количества или свойства объекта. Однако получение данных магнитно-резонансной визуализации не происходит мгновенно. Субъект может двигаться во время сбора данных, что искажает полученные данные. Существуют различные способы компенсации движения субъекта, в том числе - стробирование сбора данных.
Патентная публикация США US 2005/0128123 А1 раскрывает систему и способ для подавления артефактов движения, вносимых перемещением радарной системы детектирования. Вкратце, по своей архитектуре один, среди прочих, вариантов осуществления системы может быть реализован следующим образом. Система включает в себя доплеровский радарный модуль, выполненный с возможностью передачи микроволнового сигнала, направленного на объект, и приема отраженных микроволновых сигналов от объекта и живого субъекта, расположенного за объектом. Кроме того, система включает в себя контрольный модуль, выполненный с возможностью передачи контрольного сигнала на объект и получения отраженного контрольного сигнала от объекта. Сравнивая два отраженных сигнала от доплеровского радарного модуля и контрольного устройства, сигнальный процессор подавляет артефакты движения, генерируемые движением доплеровского радарного модуля, чтобы идентифицировать присутствие за объектом живого субъекта. Также обеспечены другие системы и способы.
Патентная публикация США US 2010/0271615 А1 раскрывает систему, которая использует измерения дальности и доплеровской скорости от лидарной системы и изображения от видеосистемы для оценки траектории мишени с шестью степенями свободы. Система оценивает эту траекторию в два шага: первый шаг, на котором измерения дальности и доплеровские измерения от лидарной системы вместе с различными измерениями признаков, полученными из изображений от видеосистемы, используются для оценки аспектов движения мишени на первом шаге (т.е. траектория мишени); и второй шаг, на котором изображения от видеосистемы и аспекты движения мишени по первому шагу используются для оценки аспектов движения мишени на втором шаге. Как только аспекты движения мишени на втором шаге будут оценены, можно создать трехмерное изображение мишени.
В патентной заявке США US 2014/0073908 раскрыта система магнитно-резонансной визуализации с блоком датчика движения для детектирования движения пациента. Известный блок датчика движения может быть встроен в катушку радиочастотного (РЧ) приемника.
Раскрытие сущности изобретения
Изобретение обеспечивает медицинское устройство, компьютерный программный продукт и способ, раскрытые в независимых пунктах формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Для измерения движения субъекта в магнитно-резонансной визуализации использовались радарные системы, такие как сверхширокополосный радар. Однако радарный сигнал, используемый для направления или инициирования магнитно-резонансной визуализации, может быть искажен или содержать шум. Варианты осуществления могут это улучшить за счет использования дополнительной системы детектирования движения для одновременного измерения сигнала перемещения, который может быть скомбинирован и/или скоррелирован с радарным сигналом. Например, могут использоваться данные от камеры и/или системы ультразвуковой визуализации (такой как система доплеровской ультразвуковой визуализации). Это может привести к более надежному комбинированному сигналу движения, который можно использовать для таких вещей, как инициирование сбора данных и управление сбором данных магнитно-резонансной визуализации или даже управление устройством лучевой терапии.
В одном из аспектов изобретения обеспечено медицинское устройство, содержащее систему магнитно-резонансной визуализации, которая выполнена с возможностью получения данных магнитно-резонансной визуализации из зоны визуализации. Система магнитно-резонансной визуализации содержит опору субъекта, выполненную с возможностью поддержки по меньшей мере части субъекта в зоне визуализации. Опора субъекта содержит опорную поверхность для приема субъекта. Опора субъекта содержит радарный массив, в частности, встроенный под опорной поверхностью. В некоторых примерах радарный массив может быть встроен в опору субъекта. В других вариантах осуществления опорная поверхность образована покрытием или накладкой, содержащими радарный массив, которые размещены на опоре субъекта.
Система магнитно-резонансной визуализации дополнительно содержит радарную систему для получения радарного сигнала от субъекта. Радарная система содержит радарный массив. Медицинское устройство дополнительно содержит систему детектирования движения, выполненную с возможностью получения сигнала перемещения от субъекта. Система детектирования движения может быть разного вида в разных примерах. В одном примере система детектирования движения представляет собой оптическую или съемочную систему, которая используется для измерения движения или дыхания субъекта. В других примерах система детектирования движения может быть, например, системой ультразвуковой визуализации.
Медицинское устройство дополнительно содержит память для хранения машиноисполняемых инструкций и команд импульсной последовательности. Команды импульсной последовательности представляют собой инструкции или данные, которые можно преобразовать в такие инструкции или команды, которые могут использоваться для управления системой магнитно-резонансной визуализации для сбора данных магнитно-резонансной визуализации. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством. Исполнение машиноисполняемых инструкций инициирует непрерывный прием процессором радарного сигнала от радарной системы. Исполнение машиноисполняемых инструкций дополнительно инициирует непрерывный прием процессором сигнала перемещения от системы детектирования движения.
Исполнение машиноисполняемых инструкций дополнительно инициирует непрерывное вычисление процессором комбинированного сигнала движения на основании радарной системы и сигнала перемещения. Радарный сигнал и сигнал перемещения могут, например, быть дискретизированы цифровым образом. В контексте настоящего документа ссылки на «непрерывно» могут интерпретироваться как «повторяющимся образом». Например, радарный сигнал и сигнал перемещения могут быть дискретизированы цифровым образом и переданы в процессор с определенной скоростью передачи данных или группами данных.
Когда радарный сигнал и сигнал перемещения будут приняты процессором, процессор может среагировать, вычисляя комбинированный сигнал движения.
Исполнение машиноисполняемых инструкций дополнительно инициирует управление процессором системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации. Сбором данных магнитно-резонансной визуализации управляют, по меньшей мере частично, используя комбинированный сигнал движения. Например, комбинированный сигнал движения может использоваться для стробирования сбора данных магнитно-резонансной визуализации, чтобы можно было получить изображения в отношении конкретной фазы перемещения, такой как сердечная или дыхательная фаза. В других примерах сигнал перемещения или комбинированный сигнал движения может использоваться для управления тем, как данные магнитно-резонансной визуализации собираются во время эксплуатации другой части медицинского устройства.
Этот вариант осуществления может быть предпочтительным, потому что комбинация радарного сигнала и сигнала перемещения может позволить более точно рассчитать сигнал движения или может обеспечить сигнал движения, который менее чувствителен к шуму.
Комбинированный сигнал движения может, например, использоваться для стробирования получения сердечных и/или дыхательных сигналов с помощью магнитного резонанса. Комбинированный сигнал движения также может быть полезен для стробирования системы лучевой терапии.
В другом варианте осуществления радарная система является сверхширокополосной (UWB, ultra-wideband) радарной системой. В других примерах радарная система может быть радарной системой непрерывного излучения с частотной модуляцией (FMCW, Frequency Modulated Continuous Wave). В других примерах радарная система может быть узкополосной/двухдиапазонной радарной системой.
В другом варианте осуществления комбинированный сигнал движения содержит одно из следующего: сигнал сердечной фазы движения, сигнал дыхательной фазы движения, сигнал произвольного движения и их комбинации. Комбинированный сигнал движения может быть предпочтительным, поскольку дыхание субъекта может влиять на измерение сердечной фазы. Комбинация двух типов данных, которые присутствуют в сигнале перемещения и радарном сигнале, может помочь деконволюции множества типов движения. Сигнал произвольного движения может, например, описывать большое перемещение или положение субъекта. Поскольку субъект шевелится, может быть затруднительным с помощью единственного метода точно измерить что-либо, например, сердечную фазу или дыхательную фазу субъекта. Комбинируя, например, камеру с радарным сигналом, можно измерить сигнал сердечной фазы движения и/или дыхательной фазы движения, когда субъект шевелится или меняет свое положение.
В другом варианте осуществления комбинированный сигнал движения вычисляют путем кросс-корреляции радарного сигнала с сигналом перемещения для идентификации аналогичных сигналов и отклонения ложных сигналов. Этот вариант осуществления может быть предпочтительным, поскольку он может увеличивать отношение сигнал/шум или уменьшать ошибки при вычислении комбинированного сигнала движения.
В другом варианте осуществления комбинированный сигнал движения вычисляют путем перемножения радарного сигнала и сигнала перемещения, чтобы определить, когда радарный сигнал и сигнал перемещения совпадают. Это может быть предпочтительным, потому что и радарный сигнал, и сигнал перемещения имеют амплитуду, которая может использоваться отдельно в качестве триггера. Перемножение радарного сигнала и сигнала перемещения обеспечивает постоянное средство комбинирования двух сигналов. Между двумя сигналами может быть разность фаз или задержка, но этот эффект будет постоянным. В другом варианте осуществления комбинированный сигнал движения вычисляют путем сложения радарного сигнала с сигналом перемещения, используя корректирующий фазовый сдвиг. Например, скорость движения может быть получена с помощью доплеровского сдвига частоты радарного сигнала. Это может быть полезно для корректировки фазы между радарным сигналом и сигналом перемещения.
Корреляция между оптической системой и радарной системой.
В другом варианте осуществления комбинированный сигнал движения непрерывно вычисляется с использованием алгоритма машинного обучения. В разных примерах алгоритм машинного обучения может быть различного вида. Например, может иметься метод статистического обучения, который также может быть создан путем подгонки модели к полученному радарному сигналу и сигналу перемещения. В других примерах для преобразования радарного сигнала и сигнала перемещения в комбинированный сигнал движения могут использоваться нейронные сети, которые используют, например, сверточные нейронные сети и/или глубокое обучение. Использование нейронных сетей может быть особенно предпочтительным, потому что нейронные сети превосходно распознают паттерны.
Таким образом, отдельные паттерны радарного сигнала и сигналов движения могут быть скомбинированы с использованием глубокого обучения.
В другом варианте осуществления машиноисполняемые инструкции дополнительно обеспечивают прием процессором предварительного радарного сигнала от радарной системы. Исполнение машиноисполняемых инструкций дополнительно инициирует прием процессором предварительного сигнала перемещения от системы детектирования движения. Предварительный сигнал перемещения получают одновременно с предварительным радарным сигналом. Исполнение машиноисполняемых инструкций дополнительно инициирует прием процессором сигнала сердечного ритма от монитора сердечного ритма. Сигнал сердечного ритма получают одновременно с предварительным радарным сигналом. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор принимать сигнал дыхания от монитора дыхания. Сигнал дыхания получают одновременно с предварительным радарным сигналом.
Исполнение машиноисполняемых инструкций дополнительно инициирует обучение процессором алгоритма машинного обучения с использованием предварительного радарного сигнала, предварительного сигнала перемещения, сигнала сердечного ритма и сигнала дыхания. Этот вариант осуществления может быть выполнен для большого количества субъектов до обследования или может быть выполнен перед конкретным субъектом, визуализируемым системой магнитно-резонансной визуализации. В любом случае, в этом примере радарные сигналы и сигналы перемещения сравнивают с независимыми данными, такими как сигнал сердечного ритма и сигнал дыхания, так что алгоритм машинного обучения можно обучать непосредственно. Например, сигнал сердечного ритма и сигнал дыхания могут использоваться для вывода при обучении нейронной сети. Предварительные радарные сигналы и предварительные сигналы перемещения могут иметься, например, для конкретного субъекта или могут быть взяты из групп субъектов, которые используются для процесса обучения.
В другом варианте осуществления алгоритм машинного обучения представляет собой алгоритм статистического обучения без учителя. Исполнение машиноисполняемых инструкций дополнительно инициирует обучение процессором алгоритма машинного обучения «на лету» при приеме радарного сигнала и сигнала перемещения. Алгоритмы статистического обучения могут включать в себя подгонку модели к данным. Алгоритм статистического обучения может быть, например, адаптирован к конкретному субъекту во время получения радарного сигнала и сигнала перемещения для этого субъекта.
В другом варианте осуществления один или более сигналов перемещения и радарный сигнал обеспечивают сигнал сердечного движения. Другой из сигнала перемещения и радарного сигнала обеспечивает сигнал движения тела. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор вычислять векторное поле движения с использованием сигнала сердечного движения и сигнала движения тела. Сигнал сердечной фазы движения очищен от шумов с использованием векторного поля движения. Этот вариант осуществления может быть предпочтительным, поскольку большие перемещения тела субъекта, описанные сигналом движения тела, могут использоваться для уточнения и улучшения сигнала сердечного движения.
В другом варианте осуществления сигнал движения включает в себя движение грудной клетки. Система детектирования движения содержит камеру для детектирования движения грудной клетки. Это может быть предпочтительным, потому что камеру можно использовать для бесконтактного измерения дыхания субъекта.
Примерами камер, которые можно использовать, являются, например, камера для инфракрасной съемки, камера для цветной съемки, камера для черно-белой съемки и камера для трехмерной, или 3D, съемки.
В другом варианте осуществления камера также может опционально определять наличие поверхностной катушки на субъекте. При детектировании движения грудной клетки движение грудной клетки может детектировать путем измерения непосредственного движения субъекта, измерения изменения положения деталей одежды, надетой на субъекта, или даже изменения положения поверхностных катушек, которые были наложены на субъект.
В другом варианте осуществления система магнитно-резонансной визуализации дополнительно содержит дистанционно управляемое крепление камеры, выполненное с возможностью дистанционного наведения камеры. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять место фокусировки с помощью радарного сигнала. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять дистанционно управляемым креплением камеры, чтобы навести камеру на место фокусировки. Этот вариант осуществления может быть предпочтительным, поскольку радарная система может быть полезна при детектировании больших или крупных движений субъекта. Используя радарную систему, можно определить наилучшее место для наведения камеры. Затем камера наводится на это место фокусировки, и затем данные движения от камеры могут использоваться для дальнейшего уточнения движения, детектированного радарным сигналом.
В другом варианте осуществления система детектирования движения содержит систему ультразвуковой визуализации. Использование системы ультразвуковой визуализации может быть предпочтительным, потому что данные, полученные системой ультразвуковой визуализации, дополняют данные, полученные радарной системой.
В другом варианте осуществления система ультразвуковой визуализации содержит массив ультразвуковых преобразователей, распределенных по поверхности опоры. Например, ультразвуковые преобразователи могут быть размещены вокруг или в середине элементов радарного массива.
В другом варианте осуществления система ультразвуковой визуализации представляет собой систему с высокоинтенсивным фокусированным ультразвуком (HIFU, High-Intensity Focused Ultrasound), установленную на опоре субъекта. Этот вариант осуществления может быть предпочтительным, потому что система HIFU может быть полезна как для получения сигнала перемещения, так и для обеспечения ультразвуковой обработки на местоположениях в субъекте. Комбинированный сигнал движения может быть полезен, например, для регулирования наведения или стробирования ультразвуковой обработки субъекта с использованием системы HIFU.
В другом варианте осуществления система ультразвуковой визуализации имеет регулируемое поле обзора. Исполнение машиноисполняемых инструкций дополнительно инициирует определение процессором места фокусировки с помощью радарного сигнала и управление регулируемым полем обзора так, чтобы место фокусировки находилось в пределах регулируемого поля обзора. Например, если имеется несколько ультразвуковых преобразователей, распределенных по опорной поверхности, радарная система может быть использована для определения сначала, какие преобразователи следует использовать для получения изображения субъекта, чтобы измерить сигнал перемещения с помощью системы ультразвуковой визуализации. Это может иметь следствием повышение вероятности того, что комбинированный сигнал движения будет иметь меньше шума и содержать более подходящий сигнал для отслеживания движений субъекта.
В другом варианте осуществления медицинское устройство дополнительно содержит систему лучевой терапии. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор принимать инструкции лучевой терапии, обеспечивающие управление системой лучевой терапии для облучения целевой зоны субъекта. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять системой лучевой терапии для облучения целевой зоны с использованием инструкций лучевой терапии и комбинированного сигнала движения. Комбинированный сигнал движения используется для изменения инструкций лучевой терапии и/или стробирования облучения системой лучевой терапии. Этот вариант осуществления может быть предпочтительным, поскольку для улучшения наведения системы лучевой терапии может использоваться комбинированный сигнал движения.
В другом варианте осуществления система магнитно-резонансной визуализации выполнена с возможностью выполнения протокола магнитно-резонансной визуализации с перемещаемой кушеткой. Это протокол, в котором кушетка перемещается в систему магнитно-резонансной визуализации, и магнитно-резонансная визуализация выполняется одновременно или пошагово. Во время перемещения опоры субъекта можно детектировать и измерять как радарный сигнал, так и сигнал перемещения. Сигналы могут быть как фильтруемыми, так и коррелируемыми. При определенных положениях опоры субъекта может быть достаточно одного или другого из сигналов. Это может обеспечить преимущество улучшения отслеживания и движения во время протокола магнитно-резонансной визуализации с перемещаемой кушеткой.
В другом аспекте изобретение обеспечивает компьютерный программный продукт, содержащий машиноисполняемые инструкции, выполненные с возможностью исполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит систему магнитно-резонансной визуализации для получения данных магнитно-резонансной визуализации от зоны визуализации. Медицинское устройство содержит опору субъекта, выполненную с возможностью поддержки по меньшей мере части субъекта в зоне визуализации. Опора субъекта содержит опорную поверхность для приема субъекта. Опора субъекта содержит радарный массив, встроенный под опорной поверхностью. Медицинское устройство дополнительно содержит радарную систему для приема радарных сигналов от субъекта. Радарная система содержит радарный массив.
Медицинское устройство дополнительно содержит систему детектирования движения, выполненную с возможностью получения сигнала перемещения от субъекта. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор непрерывно принимать радарный сигнал от радарной системы. Исполнение машиноисполняемых инструкций дополнительно инициирует непрерывный прием процессором сигнала перемещения от системы детектирования движения. Исполнение машиноисполняемых инструкций дополнительно инициирует непрерывное вычисление процессором комбинированного сигнала движения на основании радарной системы и сигнала перемещения. Исполнение машиноисполняемых инструкций дополнительно инициирует управление процессором системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации. Сбором данных магнитно-резонансной визуализации управляют с помощью комбинированного сигнала движения. Преимущества этого варианта реализации были обсуждены ранее.
В другом аспекте изобретение обеспечивает способ эксплуатации медицинского устройства. Медицинское устройство содержит систему магнитно-резонансной визуализации для получения данных магнитно-резонансной визуализации от зоны визуализации. Медицинское устройство содержит опору субъекта, выполненную с возможностью поддержки по меньшей мере части субъекта в зоне визуализации. Опора субъекта содержит опорную поверхность для приема субъекта. Опора субъекта содержит радарный массив, встроенный под опорной поверхностью. Медицинское устройство дополнительно содержит радарную систему для получения радарного сигнала от субъекта. Радарная система содержит радарный массив.
Медицинское устройство дополнительно содержит систему детектирования движения, выполненную с возможностью получения сигнала перемещения от субъекта. Способ включает в себя непрерывный прием радарного сигнала от радарной системы. Способ дополнительно включает в себя непрерывный прием сигнала перемещения от системы детектирования движения. Способ дополнительно включает в себя непрерывное вычисление комбинированного сигнала движения на основании радарной системы и сигнала перемещения. Способ дополнительно включает в себя управление системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации. Сбором данных магнитно-резонансной визуализации управляют с помощью комбинированных сигналов движения.
Следует понимать, что один или более из вышеупомянутых вариантов осуществления изобретения могут комбинироваться при условии, что комбинируемые варианты осуществления не являются взаимоисключающими.
Как будет понятно специалисту в данной области техники, аспекты настоящего изобретения могут быть реализованы в виде устройства, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут иметь вид полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта осуществления, объединяющего программные и аппаратные аспекты, на которые в общем в настоящем документе упоминаются как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут иметь вид компьютерного программного продукта, реализованного на одном или более компьютерно-читаемом (читаемых) носителе (носителях), с реализованным на нем (них) компьютерно-исполняемым кодом.
Может использоваться любая комбинация одного или более компьютерно-читаемых носителей. Компьютерно-читаемый носитель может быть компьютерно-читаемым сигнальным носителем или компьютерно-читаемым носителем данных. «Компьютерно-читаемый носитель данных», как употребляется в настоящем документе, включает в себя любой материальный носитель данных, который может хранить инструкции, исполняемые процессором вычислительного устройства. Компьютерно-читаемый носитель данных может упоминаться как «компьютерно-читаемый энергонезависимый носитель данных». Компьютерно-читаемый носитель данных также может упоминаться как «материальный компьютерно-читаемый носитель». В некоторых вариантах осуществления компьютерно-читаемый носитель данных также может хранить данные, к которым может получить доступ процессор вычислительного устройства. Примеры компьютерно-читаемых носителей данных включают в себя, но не ограничиваются этим: гибкий диск, магнитный жесткий диск, твердотельный жесткий диск, флэш-память, флэш-накопитель USB, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RWnnn DVD-R. Термин «компьютерно-читаемый носитель данных» также относится к различным типам носителей данных, к которым компьютерное устройство может осуществлять доступ через сеть или канал связи. Например, данные могут быть получены через модем, через Интернет или по локальной сети. Компьютерно-исполняемый код, реализованный на компьютерно-читаемом носителе, может быть передан с использованием любого подходящего носителя, включая, но не ограничиваясь этим, беспроводную связь, проводную линию, волоконно-оптический кабель, RF и т.д. или любую подходящую комбинацию вышеизложенного.
Компьютерно-читаемый сигнальный носитель может включать в себя распространяемый сигнал данных с содержащимся в нем компьютерно-исполняемым кодом, например, в основной полосе частот или как часть несущей волны. Такой распространяемый сигнал может быть любого типа из разнообразных сигналов, включая, но не ограничиваясь этим, электромагнитный, оптический или любую их подходящую комбинацию. Компьютерно-читаемый сигнальный носитель может быть любым компьютерно-читаемым носителем, который не является компьютерно-читаемым носителем данных и который может передавать, распространять или транспортировать программу для использования системой, оборудованием или устройством выполнения команд или в связи с ними.
«Компьютерная память» или «память» - это пример компьютерно-читаемого носителя данных. Компьютерная память - это любая память, которая непосредственно доступна для процессора. Компьютерная память может быть любым энергозависимым или энергонезависимым компьютерно-читаемым носителем данных.
«Процессор», в смысле, используемом в настоящем документе, включает в себя электронный компонент, который способен выполнять программу или машиноисполняемую инструкцию или компьютерно-исполняемый код. Ссылки на вычислительное устройство, содержащее «процессор», следует интерпретировать как возможно содержащее более одного процессора или процессорного ядра. Процессор может быть, например, многоядерным процессором. Процессор также может относиться к набору процессоров в одной компьютерной системе или распределенных между несколькими компьютерными системами. Термин «вычислительное устройство» также следует интерпретировать как возможно обозначающее совокупность или сеть вычислительных устройств, каждое из которых содержит процессор или процессоры. Компьютерно-исполняемый код может исполняться множеством процессоров, которые могут находиться в одном вычислительном устройстве или которые даже могут быть распределены по множеству вычислительных устройств.
Компьютерно-исполняемый код может содержать машиноисполняемые инструкции или программу, которая обеспечивает выполнение процессором одного из аспектов настоящего изобретения. Компьютерно-исполняемый код для выполнения операций для аспектов настоящего изобретения может быть написан на любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, С++ или тому подобное, и обычные процедурные языки программирования, такие как язык программирования С или аналогичные языки программирования и скомпилированные в машиноисполняемые инструкции. В некоторых случаях компьютерно-исполняемый код может быть в виде языка высокого уровня или в предварительно скомпилированном виде и использоваться совместно с интерпретатором, который генерирует машиноисполняемые инструкции «на лету».
Компьютерно-исполняемый код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя через сеть любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), либо может быть выполнено подключение к внешнему компьютеру (например, через Интернет с помощью провайдера Интернет-услуг).
Аспекты настоящего изобретения раскрыты со ссылкой на иллюстрации блок-схем и/или структурных схем способов, устройств (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Следует понимать, что каждый блок или часть блоков блок-схемы, иллюстраций и/или структурных схем могут быть реализованы компьютерными программными инструкциями в виде компьютерно исполняемого кода, когда это применимо. Кроме того, понятно, что, когда они не являются взаимоисключающими, комбинации блоков в различных блок-схемах, иллюстрациях и/или структурных схемах могут комбинироваться. Эти компьютерные программные инструкции могут быть предоставлены процессору компьютера общего назначения, компьютера специального назначения или другого программируемого устройства обработки данных для создания машины, так что инструкции, исполняемые с помощью процессора компьютера или другого программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
Эти компьютерные программные инструкции могут также храниться на компьютерно-читаемом носителе, который может предписывать компьютеру, другому программируемому устройству обработки данных или другим устройствам функционировать определенным образом, так что инструкции, хранящиеся на компьютерно-читаемом носителе, создают продукт, включающий в себя инструкции, которые реализуют функцию/действие, указанные в блоке или блоках блок-схемы и/или структурной схемы.
Компьютерные программные инструкции также могут быть загружены в компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы обеспечить выполнение последовательности операционных шагов на компьютере, другом программируемом устройстве или других устройствах для получения реализуемого компьютером процесса, так что инструкции, исполняемые на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
«Пользовательский интерфейс», в смысле, используемом в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» может также называться «человеко-машинным интерфейсом». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать компьютеру возможность приема ввода от оператора и может обеспечивать вывод с компьютера пользователю. Иначе говоря, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, а интерфейс может позволять компьютеру отображать результаты управления или манипуляции оператором. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных посредством клавиатуры, мыши, трекбола, сенсорной панели, координатно-указательного устройства, графического планшета, джойстика, геймпада, веб-камеры, гарнитуры, педали, проводной перчатки, пульта дистанционного управления и акселерометра - все это примеры компонентов пользовательского интерфейса, которые обеспечивают возможность приема информации или данных от оператора.
«Аппаратный интерфейс», в смысле, используемом в настоящем документе, включает в себя интерфейс, обеспечивающий процессору компьютерной системы возможность взаимодействия и/или управления внешним вычислительным устройством и/или аппаратурой. Аппаратный интерфейс может обеспечить отправку процессором управляющих сигналов или инструкций на внешнее вычислительное устройство и/или оборудование. Аппаратный интерфейс также может позволить процессору обмениваться данными с внешним вычислительным устройством и/или оборудованием. Примеры аппаратного интерфейса включают в себя, но не ограничиваются этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, разъем беспроводной локальной сети, разъем TCP/IP, разъем Ethernet, интерфейс управляющего напряжения, MIDI-интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
Данные магнитного резонанса (MR) определены в настоящем документе как зарегистрированные измерения радиочастотных сигналов, излучаемых атомными спинами с использованием антенны магнитно-резонансного устройства во время магнитно-резонансного визуализирующего сканирования. Данные магнитного резонанса или данные магнитно-резонансной визуализации являются примером данных медицинской визуализации. Магнитно-резонансное (MP) изображение определяется в настоящем документе как реконструированная двух- или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной визуализации.
Краткое описание чертежей
Далее предпочтительные варианты осуществления изобретения будут раскрыты только в качестве примера и со ссылкой на чертежи, на которых:
на фиг. 1 представлен пример медицинского устройства;
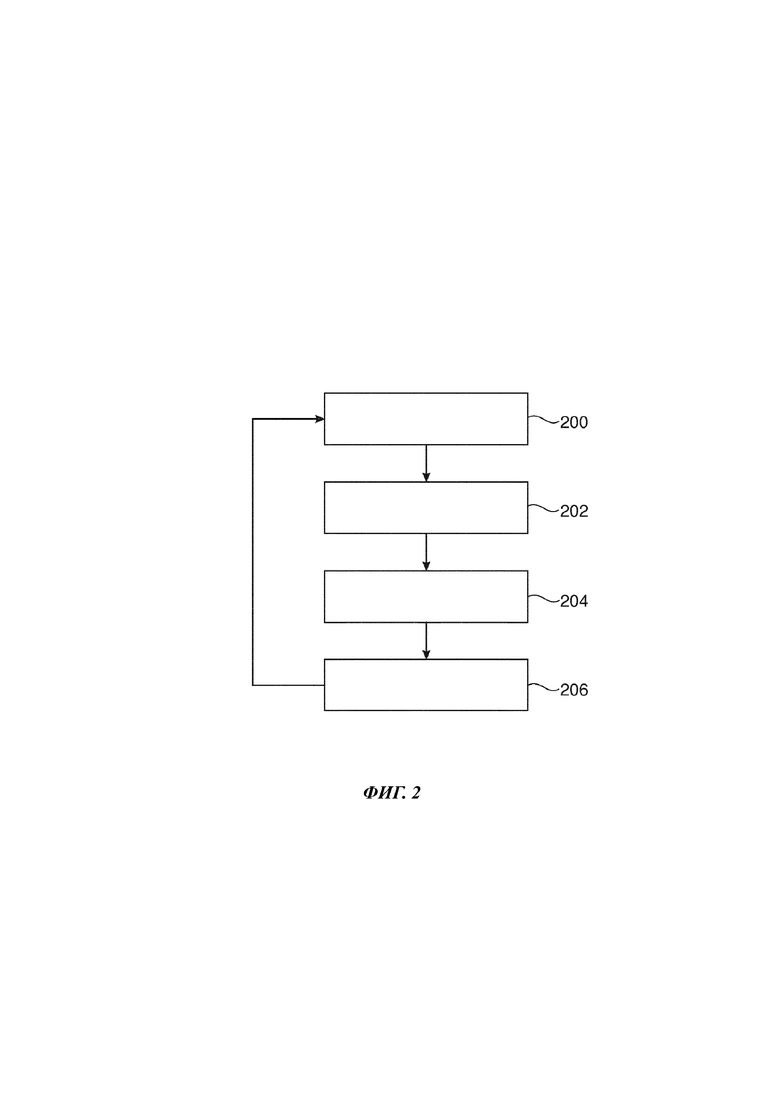
на фиг. 2 показана блок-схема, иллюстрирующая способ эксплуатации медицинского устройства по фиг. 1;
на фиг. 3 представлен еще один пример медицинского устройства;
на фиг. 4 представлен еще один пример медицинского устройства;
на фиг. 5 представлен еще один пример медицинского устройства;
на фиг. 6 показана блок-схема, иллюстрирующая способ эксплуатации медицинского устройствам по фиг. 5;
на фиг. 7 представлен еще один пример медицинского устройства;
на фиг. 8 показана блок-схема, иллюстрирующая способ вычисления комбинированного сигнала движения;
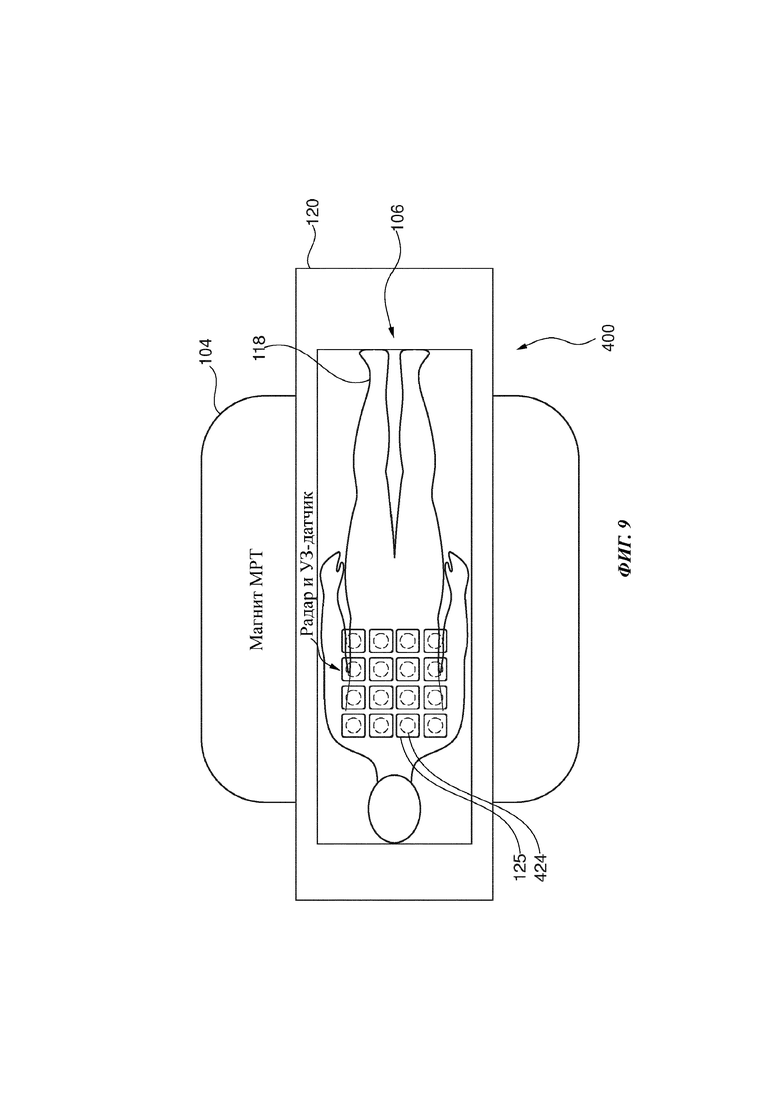
на фиг. 9 представлен еще один пример медицинского устройства; и
на фиг. 10 показана блок-схема, иллюстрирующая еще один способ вычисления комбинированного сигнала движения.
Осуществление изобретения
Одинаково пронумерованные элементы на этих чертежах являются либо эквивалентными элементами, либо выполняют ту же функцию. Элементы, которые обсуждались ранее, не обязательно будут рассматриваться на следующих чертежах, если функция эквивалентна.
На фиг. 1 показан пример медицинского устройства 100 с системой 102 магнитно-резонансной визуализации с магнитом 104. Магнит 104 представляет собой сверхпроводящий магнит цилиндрического типа с туннелем 106, проходящим сквозь него. Также возможно использование разных типов магнитов; например, также можно использовать как разделенный цилиндрический магнит, так и так называемый открытый магнит. Разделенный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две части, чтобы обеспечить доступ к изо плоскости магнита, такие магниты могут, например, использоваться в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две магнитные секции, одну над другой, с пространством между ними, достаточным для размещения субъекта: расположение этих двух секций аналогично расположению катушки Гельмгольца. Открытые магниты популярны, потому что субъект менее ограничен. Внутри криостата цилиндрического магнита находится набор сверхпроводящих катушек. Внутри туннеля 106 цилиндрического магнита 104 находится зона 108 визуализации, в которой магнитное поле является сильным и достаточно однородным для выполнения магнитно-резонансной визуализации. Внутри зоны 108 визуализации показана исследуемая область 109. Собираемые данные магнитно-резонансной визуализации обычно собираются для исследуемой области. Субъект 118 показан поддерживаемым опорой 120 субъекта так, что по меньшей мере часть субъекта 118 находится внутри зоны 108 визуализации и исследуемой области 109.
Внутри туннеля 106 магнита также находится набор градиентных катушек 110 магнитного поля, которые используются для сбора данных предварительной магнитно-резонансной визуализации для пространственного кодирования магнитных спинов в зоне 108 визуализации магнита 104. Градиентные катушки 110 магнитного поля подключены к источнику 112 питания градиентных катушек магнитного поля. Предполагается, что градиентные катушки 110 магнитного поля являются типичными. Обычно градиентные катушки 110 магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания градиентных катушек магнитного поля подает ток на градиентные катушки магнитного поля. Током, подаваемым на градиентные катушки 110 магнитного поля, управляют в зависимости от времени, и он может быть линейно изменяемым или импульсным.
К зоне 108 визуализации примыкает радиочастотная катушка 114 для управления ориентацией магнитных спинов в зоне 108 визуализации и для приема радиопередач от спинов также в зоне визуализации. Радиочастотная антенна может содержать множество катушечных элементов. Радиочастотная антенна также может называться каналом или антенной. Радиочастотная катушка 114 соединена с радиочастотным приемопередатчиком 116. Радиочастотная катушка 114 и радиочастотный приемопередатчик 116 могут быть заменены отдельными передающей и приемной катушками и отдельными передатчиком и приемником. Следует понимать, что радиочастотная катушка 114 и радиочастотный приемопередатчик 116 являются типовыми. Также предполагается, что радиочастотная катушка 114 представляет собой специальную передающую антенну и специальную приемную антенну. Аналогично, приемопередатчик 116 может также представлять собой отдельные передатчик и приемники. Радиочастотная катушка 114 может также иметь множество элементов приема/передачи, а радиочастотный приемопередатчик 116 может иметь несколько каналов приема/передачи. Например, если реализуется метод параллельной визуализации, такой как SENSE, радиочастота 114 может иметь множество катушечных элементов.
Опора 120 субъекта показана как поддерживающая субъекта 118 в зоне визуализации. Опора 120 субъекта имеет опорную поверхность 121, которая выполнена с возможностью приема субъекта 118. Имеется радарная система 124, которая показана как расположенная внутри опоры 120 субъекта. Радарная система 124 также содержит радарный массив 125, который находится под опорной поверхностью 121 и нацелен в направлении субъекта 118. Множество элементов радарного массива 125 позволяют измерять движение субъекта 118, подлежащее измерению. Это включает в себя как внутреннее, так и внешнее движение субъекта 118. Блок 122 предназначен для представления системы 122 детектирования движения. Дополнительные примеры системы 122 детектирования движения подробно раскрыты на дополнительных чертежах.
Источник 112 питания градиентной катушки магнитного поля, приемопередатчик 116, система 122 детектирования движения и радарная система 124 показаны как подключенные к аппаратному интерфейсу 128 компьютерной системы 126. Компьютерная система дополнительно содержит процессор 130, который находится во взаимодействии с аппаратной системой 128, памятью 134 и пользовательским интерфейсом 132. Память 134 может быть любой комбинацией памяти, доступной процессору 130. Она может включать в себя такие элементы, как основная память, кэшированная память, а также энергонезависимая память, такая как флэш-ОЗУ, жесткие диски или другие запоминающие устройства. В некоторых примерах память 134 может рассматриваться как долговременный компьютерно-читаемый носитель.
Память 134 показана содержащей машиноисполняемые инструкции 140. Машиноисполняемые инструкции 140 обеспечивают процессору 130 возможность управления работой и функциями системы 100 магнитно-резонансной визуализации. Машиноисполняемые инструкции 140 также могут обеспечивать процессору 130 возможность выполнения различных функций анализа и расчета данных. Компьютерная память 134 также показана содержащей команды 142 импульсной последовательности. Команды импульсной последовательности обеспечивают управление системой 100 магнитно-резонансной визуализации, чтобы получать серию данных магнитно-резонансной визуализации от субъекта 118 согласно протоколу магнитно-резонансной визуализации.
Память 134 дополнительно показана содержащей радарный сигнал 144, который был получен с помощью радарной системы 124. Память 134 дополнительно показана содержащей сигнал 146 перемещения, который был зарегистрирован системой 122 детектирования движения. Память 134 также показана содержащей комбинированный сигнал 148 движения, который был вычислен с использованием радарной системы 144 и сигнала 146 перемещения. Комбинированный сигнал 148 движения может, например, быть различного вида в разных примерах. Это может быть сердечный сигнал, сигнал фазы дыхания или даже их комбинацией. Комбинированный сигнал 148 движения также может содержать подробности о больших или крупных движениях субъекта 118.
Память 134 дополнительно показана содержащей данные 150 магнитно-резонансной визуализации, которые были получены путем управления системой 102 магнитно-резонансной визуализации с помощью команд 142 импульсной последовательности. Память 134 также показана содержащей магнитно-резонансное изображение 152, которое было восстановлено из данных 150 магнитно-резонансной визуализации. Данными 150 магнитно-резонансной визуализации можно частично управлять с использованием комбинированного сигнала 148 движения. Например, комбинированный сигнал 148 движения может использоваться для стробирования или иной регулировки управления данными магнитно-резонансной визуализации.
Память 134 также показана содержащей опциональный алгоритм 154 машинного обучения, который может использоваться для вычисления комбинированного сигнала 148 движения на основании радарной системы 144 и сигнала 146 перемещения.
На фиг. 2 показана блок-схема, представляющая способ эксплуатации медицинского устройства 100 по фиг. 1. Способ, представленный на фиг.2, функционирует как контур управления. Сначала на шаге 200 принимают радарный сигнал 144. Затем на шаге 202 принимают сигнал 146 перемещения. Шаги 200 и 202 могут выполняться одновременно или в любом порядке. Прием радарного сигнала 144 и сигнала 146 перемещения может быть, например, в виде цифровых данных. В этом случае радарный сигнал 144 и сигнал 146 перемещения могут быть получены дискретными порциями данных. Хотя их получают дискретно, их можно получать регулярным или повторяющимся образом, и в этом случае они представляют собой непрерывный сбор данных. Затем на шаге 204 на основании радарного сигнала 144 и сигнала 146 перемещения вычисляют комбинированный сигнал 148 движения. Затем на шаге 206 системой 102 магнитно-резонансной визуализации управляют с помощью команд 142 импульсной последовательности, чтобы получить данные 150 магнитно-резонансной визуализации. Комбинированный сигнал 148 движения может, например, использоваться для стробирования сбора данных 150 магнитно-резонансной визуализации или для регулировки команд 142 импульсной последовательности во время сбора данных.
На фиг.3 показан еще один пример медицинского устройства 300. Пример, показанный на фиг.3, аналогичен показанному на фиг.1. На фиг.3 системой детектирования движения является камера 322. Камера показана прикрепленной к опциональному дистанционно управляемому креплению 324 камеры. Дистанционно управляемое крепление 324 камеры позволяет дистанционно регулировать место фокусировки камеры 322.
Память 134 показана содержащей данные 346 изображения. Данные изображения были зарегистрированы камерой 322 и являются примером сигнала перемещения. Радарная система 124 может, например, быть полезной при определении того, какую часть субъекта 118 можно лучше всего измерять с помощью камеры 322. Память 134 показана опционально содержащей место 350 фокусировки, которое было определено с помощью радарного сигнала 144. Место 350 фокусировки затем можно использовать для генерирования команд, которые побуждают дистанционно управляемое крепление 324 камеры регулировать положение камеры 322.
В этом примере радиочастотная катушка 114 представляет собой поверхностную катушку, которая размещена на грудной клетке субъекта 118.
Камера 322 может, например, измерять данные 346 изображения, которые затем преобразуются в сигнал 146 перемещения за счет регистрации изменения положения радиочастотной катушки 114 при дыхании субъекта 118. В других примерах камера 322 может смотреть прямо на грудную клетку субъекта 118 или может отслеживать перемещение элементов одежды, надетой на субъект 118.
На фиг.4 показан еще один пример медицинского устройства 400. Пример, показанный на фиг.4, аналогичен примеру медицинского устройства на фиг.1. В этом примере система детектирования движения представляет собой систему 422 ультразвуковой визуализации. Предусмотрены преобразователи 424, встроенные в опору 120 субъекта. Соединения между системой 422 ультразвуковой визуализации и ультразвуковыми преобразователями 424 не показаны. Память 134 показана содержащей ультразвуковые данные 446, которые были получены с использованием системы 422 ультразвуковой визуализации, такой как система ультразвуковой визуализации с допплеровским формированием изображения. Ультразвуковые данные 446 являются примером сигнала 146 перемещения.
Чтобы определить, какие ультразвуковые преобразователи 424 следует использовать для измерения ультразвуковых данных, радарная система 124 может использоваться для первоначального определения места 350 фокусировки. Место 350 фокусировки может использоваться для выбора того, какие ультразвуковые преобразователи 424 следует использовать для измерения ультразвуковых данных 446.
На фиг.5 показан еще один пример медицинского устройства 500. Пример, показанный на фиг.5, аналогичен примеру, показанному на фиг.3, за исключением того, что медицинское устройство дополнительно содержит систему 502 лучевой терапии. В этом конкретном примере система лучевой терапии представляет собой систему с линейным ускорителем (LINAC), однако система LINAC может быть заменена другими системами лучевой терапии.
Система 502 лучевой терапии содержит гентри 506 и источник 508 лучевой терапии. Гентри 506 предназначен для вращения источника 508 лучевой терапии вокруг оси 540 вращения гентри. Рядом с источником 508 лучевой терапии находится коллиматор 510.
Магнит 112, показанный в этом варианте осуществления, представляет собой стандартный цилиндрический сверхпроводящий магнит. Магнит 112 имеет криостат 514 со сверхпроводящими катушками 516 внутри него. Внутри криостата также имеются сверхпроводящие экранирующие катушки 518.
Как и на фиг.1, к приемопередатчику 116 подключена катушка 114 магнитного резонанса. На фиг.5 также показана опциональная катушка 528 для тела, прикрепленная к приемопередатчику.
Опора 120 субъекта может позиционироваться с помощью опциональной системы 537 механического позиционирования. Внутри субъекта 118 имеется целевая зона 538. Ось 540 вращения гентри в этом конкретном варианте осуществления соосна с цилиндрической осью магнита 104. Опора 120 субъекта расположена так, что целевая зона 538 лежит на оси 540 вращения гентри. Источник 508 излучения показан генерирующим пучок 542 излучения, проходящий через коллиматор 510 и через целевую зону 538. Поскольку источник 508 излучения вращается вокруг оси 540, пучок 542 излучения будет нацелен на целевую зону 538. Пучок 542 излучения проходит через криостат514 магнита.
Система 537 механического позиционирования и система 502 лучевой терапии показаны дополнительно подключенными к аппаратному интерфейсу 128 компьютерной системы 126.
Компьютерная память 134 дополнительно показана содержащей инструкции 560 лучевой терапии. Инструкции лучевой терапии - это инструкции или команды, которые могут быть преобразованы в такие команды, которые могут управлять системой 502 лучевой терапии для облучения целевой зоны 538. Исполнение инструкций 560 лучевой терапии может быть изменено или стробировано с использованием комбинированного сигнала 148 движения.
На фиг.6 показана блок-схема, иллюстрирующая способ эксплуатации медицинского устройства 500 по фиг.5. Сначала на шаге 600 принимают инструкции 560 лучевой терапии. Затем способ переходит к шагу 200-206, как показано на фиг.2. После выполнения шага 206 способ переходит к шагу 602, где системой лучевой терапии управляют для облучения целевой зоны 538 с использованием инструкций 560 лучевой терапии и комбинированного сигнала 148 движения. Например, комбинированный сигнал 148 движения может использоваться для стробирования облучения целевой зоны 538 или он также может использоваться для регулировки местоположения целевой зоны 538, когда субъект 118 движется произвольно или непроизвольно.
Высококачественное инициирование в медицинской визуализации (особенно в МРТ) полезно для большого количества исследований, например при визуализации сердца, брюшной полости или таза. Триггерные сигналы (комбинированный сигнал движения) для последовательности визуализации (команды импульсной последовательности) могут выполняться при одинаковых состояниях выдоха или в одинаковые моменты сердечного цикла, что приводит к превосходному качеству изображения. Как правило, показатели жизнедеятельности регистрируются с помощью специальных датчиков, которые дороги, а также подвержены ошибкам и смещениям. Кроме того, объемное движение пациента часто является проблемой, особенно при магнитно-резонансной визуализации, когда сканирование может длиться до нескольких минут, а обследование - до часа.
В некоторых примерах отсутствуют контактные датчики, такие как дыхательный пояс или PPU-датчик для кардиомониторинга, и вместо них используются два бесконтактных способа определения показателей жизнедеятельности. Ранее было показано, что бесконтактные способы по меньшей мере не уступают обычным датчикам, но дешевле и надежнее. Кроме того, сочетание методов радарного и оптического детектирования обеспечивает улучшенное качество сигнала с использованием кросс-корреляции между системами, улучшение схем калибровки или (пространственного) направления одной системы с использованием другой. Например, радар может проникать внутрь тела и лучше подходит для регистрации движения внутренних органов, чем камера. С другой стороны, камера лучше подходит для регистрации исключительных событий, таких как большое перемещение пациента, во время которых радарный сигнал ненадежен.
Примеры могут включать в себя массив недорогих (сверхширокополосных) радарных датчиков на кушетке или под кушеткой пациента в визуализирующем устройстве, а также оптическую или инфракрасную камеру рядом с туннелем, наблюдающую за пациентом во время визуализации.
Обе системы подключают к компьютеру, который получает дыхательные и/или сердечные сигналы из необработанных данных. Доступны подходящие алгоритмы как для оптической, так и для радарной части.
Хотя оба объекта теперь могут получать данные (радарный сигнал и сигнал перемещения) показателей жизнедеятельности, эти сигналы можно комбинировать, например, для получение лучшего отношения сигнал/шум или, например, радарный массив может обеспечить исследуемую область для оптической системы, что может увеличивать масштаб для получения наилучшего возможного выходного сигнала вместо мониторинга большей площади с относительно низким сигналом.
Как сверхширокополосный (UWB) радар, так и оптические системы для определения показателей жизнедеятельности были представлены различными группами, демонстрирующими осуществимость таких систем. Что касается оптической части, то система может содержать камеру с надлежащей оптикой, расположенную рядом с туннелем, и программный алгоритм, который вычисляет дыхательные сигналы на основании признака перемещения в видеопотоке или сердечные сигналы на основании изменения цвета кожи пациента на видео.
Система радарного массива может быть удобно размещена в кушетке пациента или под кушеткой пациента, что обеспечивает широкий охват верхней части тела пациента. Были продемонстрированы системы, работающие на разных частотах в гигагерцовом диапазоне, а также сверхширокополосные решения. Дыхательные или сердечные сигналы могут быть рассчитаны по отраженным в теле сигналам или по измерениям времени пролета.
Для получения и улучшения дыхательного триггера система может работать следующим образом:
Пример 1
- Обе системы обеспечивают кривую дыхания и триггерные точки, полученные на основе видео- и радарных измерений.
- Затем независимые измерения коррелируются и генерируется улучшенный триггер.
Пример 2
- Обе системы обеспечивают кривую дыхания и триггерные точки, полученные на основании видео- и радарных измерений.
- В радарных данных с пространственным разрешением определяют область с наилучшим отношением сигнал/шум, и координаты передают в оптическую систему.
- Поле зрения камеры настраивается на эту исследуемую область (угол обзора, масштабирование, экспозиция...), и можно получить более качественную кривую дыхания.
На фиг.7 показан еще один вид медицинской системы 300 визуализации. В примере, показанном на фиг.7, радарные датчики 125 расположены в опоре 120 субъекта или под ней в виде массива. Кроме того, одна или более камер 322 могут наблюдать за пациентом или субъектом 118 в туннеле 106 магнита 104.
На фиг.8 показана блок-схема потока сигналов для вычисления комбинированного сигнала движения. Движение показывает поток 800 изображений от камеры, принятых от камеры 322, и радарное измерение 802 от каждого датчика 125 в массиве. Затем сигналы обрабатывают, например, компьютером, или рабочей станцией, 126 для радарных сигналов и анализа видео. Результатом этой обработки является сигнал движения, или данные 346 изображения, или видеопоток. Также получают радарные данные 144. Блок 804 показывает, что сигналы 346 и 144 коррелируются и комбинируются. Выходной сигнал блока 804 представляет собой комбинированный сигнал 148 движения. На фиг.8 анализируют входные данные от обеих отдельных систем. Затем либо генерируют улучшенные триггерные сигналы, используя, например, например, корреляцию сигналов, либо выходные данные одной системы используют для задания исследуемой области для другого устройства, улучшая, таким образом, общее качество сигнала. Рабочая станция для анализа радарных сигналов и видео также может быть заменена локальным блоком цифровой обработки сигналов (DSP, digital signal processing) в MP туннеле или рядом с ним, или может быть встроена в кушетку пациента.
В качестве альтернативы оптическим датчикам, таким как камеры, также могут использоваться ультразвуковые системы. И сверхширокополосный (UWB) радар, и ультразвуковая доплерография (DUS, Doppler ultrasound) (система ультразвуковой визуализации) для определения показателей жизнедеятельности были представлены различными группами, демонстрирующими осуществимость таких систем. Ультразвуковые датчики генерируют акустические сигналы, а также детектируют отраженные сигналы. Ультразвуковая доплерография (DUS) отражает физиологическую активность сердца с точки зрения кровотока и движения сердечной стенки и, следовательно, непосредственно контролирует сердечный цикл в режиме реального времени. Более того, в зависимости от расположения преобразователя сигнал DUS соответствует разным моментам сердечного цикла, потенциально обеспечивая более точную информацию для инициирования по сердечному циклу, чем обычная ЭКГ. Оба способа могут использоваться одновременно и обеспечивают лучшую регистрацию показателей жизнедеятельности и триггерные сигналы.
Примеры могут включать в себя массив недорогих (сверхширокополосных) радарных датчиков, установленных в кушетке пациента или под ним, или интегрированных в радиочастотную катушку визуализирующего устройства, а также ультразвуковую систему детектирования (DUS). Обе системы подключают к компьютеру, который получает дыхательные и/или сердечные сигналы из необработанных данных. Для DUS, а также для радарной части доступны соответствующие алгоритмы.
Хотя оба объекта могут получать данные показателей жизнедеятельности, эти сигналы можно комбинировать, например, для получения лучшего отношения сигнал/шум или для целей направления (наведения). Таким образом, радарный массив может обеспечить исследуемую область для системы DUS, что может увеличить масштаб для детектирования движения конкретного органа (сердце, легкое, печень), чтобы получить наилучший возможный или улучшенный выходной сигнал вместо мониторинга большей площади с относительно низким сигналом.
Что касается ультразвуковой (УЗ) части, датчик состоит из локального массива У3-датчиков, который встроен в гелевую прокладку, обеспечивающую контакт с кожей пациента, и программного алгоритма, который вычисляет дыхательные сигналы на основании признака перемещения в видеопотоке или сердечные сигналы на основании изменения цвета кожи пациента на видео.
Система радарного массива может быть удобно размещена рядом с УЗ датчиком, в кушетке пациента или под кушеткой пациента или встроена в радиочастотную катушку, что обеспечивает широкий охват верхней части тела пациента. Были продемонстрированы системы, работающие на разных частотах в гигагерцовом диапазоне, а также сверхширокополосные решения. Сигналы дыхания, движения органов или сердечные сигналы можно вычислить по отраженным в теле сигналам или по измерениям времени пролета.
Для получения и улучшения дыхательного триггера система может работать следующим образом:
Пример 1
- Обе системы обеспечивают кривую дыхания и триггерные точки, полученные на основании ультразвуковых и радарных измерений.
- Затем независимые измерения коррелируются и генерируется улучшенный триггер.
Пример 2
- Обе системы обеспечивают кривую дыхания и триггерные точки, полученные на основании ультразвуковых и радарных измерений.
- В радарных данных с пространственным разрешением определяют область с наилучшим отношением сигнал/шум, и координаты передают в ультразвуковую систему, которая затем локально детектирует признаки жизнедеятельности с высоким отношением сигнал/шум.
При размещении в РЧ-катушке, управление обработкой данных с УЗ датчиков, а также подачей питания может осуществляться с помощью цифровых RXE-модулей, уже имеющихся в катушке.
На фиг.9 показан еще один вид медицинского устройства 400. Вид сверху показан с субъектом 118, лежащим на опоре 120 субъекта. Имеется массив радарных элементов 125. В этом примере ультразвуковой преобразователь 424 расположен выше и внутри каждого из радарных элементов 125. Радарные датчики и ультразвуковые датчики расположены в опоре пациента или под ней в виде массива или встроены в радиочастотную катушку.
На фиг.10 показана блок-схема, иллюстрирующая сигнальный поток в процессе создания комбинированного сигнала 148 движения. Входными данными являются ультразвуковые данные 1000, которые измеряются каждым ультразвуковым преобразователем. Кроме того, входными данными являются измерения радара для каждого радарного элемента 125. Затем они вводятся в локальный процессор DSP или компьютер 126. Результатом этого являются ультразвуковые данные 446 и радарный сигнал 144. Затем они коррелируются в блоке 804. Результат представляет собой комбинированный сигнал 148 движения. Анализируются входные данные от обеих отдельных систем. Затем либо генерируют улучшенные триггерные сигналы, используя, например, корреляцию сигналов, либо выходные данные одной системы используют для задания исследуемой области для другого устройства, улучшая, таким образом, общее качество сигнала. Рабочую станцию для анализа радарных и ультразвуковых сигналов также можно заменить локальным процессорным блоком DSP, установленным в магнитно-резонансном туннеле или рядом с ним, или встроенным в кушетку пациента.
В некоторых примерах медицинское устройство дополнительно содержит модуль машинного обучения с возможностью глубокого обучения, выполненный с возможностью приема детектируемых радарных сигналов и оптических сигналов движения. Способы глубокого обучения нацелены на изучение иерархий признаков с признаками на более высоких уровнях иерархии, образованными сочетанием признаков более низкого уровня. Они могут включать в себя методы обучения для широкого спектра глубоких архитектур, включая нейронные сети со скрытыми слоями и графические модели с уровнями скрытых переменных.
Предварительное обучение без учителя делает изучение глубоких архитектур более эффективным. Такое предварительное обучение действует как своего рода предварительное кондиционирование сети, помещая значения параметров в соответствующий диапазон для дальнейшего обучения с учителем и инициализируя модель в точке в параметрическом пространстве, что делает процесс оптимизации более эффективным в смысле достижения нижнего минимума эмпирической стоимостной функции.
В одном примере одновременно радарные и оптические сигналы получают одновременно. Это позволяет проводить корреляцию в режиме реального времени, а также корректировать один сигнал с помощью другого.
В одном из примеров одно из радарной системы и системы детектирования движения (предпочтительно - радарное устройство) связано с оптической системой таким образом, чтобы передавать информацию о том, где следует пространственно фокусироваться. Оптическая система может дополнительно генерировать информацию для проверки, на месте катушка или нет.
В одном из примеров сигналы перемещаемой кушетки детектируются одновременно обоими датчиками, фильтруются и коррелируются, но в определенных областях может быть достаточно только одного из сигналов.
В одном из примеров одно из радарной системы и системы детектирования движения обеспечивает детектирование движения, а другое обеспечивает сердечный сигнал. Одновременное детектирование и коррелирование позволяет генерировать векторное поле движения, которое можно использовать для шумоподавления сигнала сердечного триггера.
В другом примере движение внутреннего органа может определяться с помощью радара, а движение поверхности (кожа, одежда, катушки...) детектируется оптическим устройством, таким как камера.
В некоторых примерах возможные механизмы корреляции между радарным сигналом и сигналом перемещения могут включать в себя одно или более из следующего:
Кросс-корреляция радарного и оптического сигналов для проверки схожести сигналов и детектирования ложных позитивных/негативных сигналов.
Перемножение сгенерированных триггерных кривых от обоих источников. Дает кривую с ярко выраженными максимумами и минимумами при совпадении сигналов (по времени). Может использоваться для измерения возможной задержки между системами (в зависимости от области тела, к которой обращается каждая система).
Обнуление сигнала: вычитают масштабированные версии как сигнала, так и временного сдвига, так что оставшийся сигнал, по существу, равен нулю. Это также можно использовать для измерения задержки. Как только задержка будет известна, оба сигнала могут быть сложены с определенным временным сдвигом для улучшения отношения сигнал/шум.
Хотя изобретение было проиллюстрировано и подробно раскрыто на чертежах и в вышеприведенном описании, такие иллюстрирование и раскрытие следует рассматривать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничивается раскрытыми вариантами осуществления.
Другие изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или шагов, а употребление формы единственного числа не исключает множественности. Один процессор или другой блок может выполнять функции нескольких элементов, указанных в формуле изобретения. Сам факт того, что определенные признаки изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих признаков не может быть успешно использована. Компьютерная программа может храниться/распространяться на соответствующем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другим оборудованием или как его часть, но также может распространяться иначе, например, по Интернету или по другим проводным или беспроводным телекоммуникационным системам. Любые ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
Список ссылочных обозначений
100 медицинское устройство
102 система магнитно-резонансной визуализации
104 магнит
106 туннель магнита
108 зона визуализации
109 исследуемая область
110 градиентные катушки магнитного поля
112 источник питания градиентной катушки магнитного поля
114 радиочастотная катушка
116 приемопередатчик
118 субъект
120 опора субъекта
121 опорная поверхность
122 система детектирования движения
124 радарная система
125 радарный массив
126 компьютерная система
128 аппаратный интерфейс
130 процессор
132 пользовательский интерфейс
134 компьютерная память
140 машиноисполняемые инструкции
142 команды импульсной последовательности
144 радарный сигнал
146 сигнал перемещения
148 комбинированный сигнал движения
150 данные магнитно-резонансной визуализации
152 магнитно-резонансное изображение
154 алгоритм машинного обучения
200 непрерывный прием радарного сигнала от радарной системы
202 непрерывный прием сигнала перемещения от системы детектирования движения
204 непрерывное вычисление комбинированного сигнала движения на основании радарной системы и сигнала перемещения
206 управление системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации
300 медицинское устройство
322 камера
324 дистанционно управляемое крепление для камеры
346 данные изображения
350 место фокусировки
400 система медицинской визуализации
422 система ультразвуковой визуализации
424 ультразвуковые преобразователи
446 ультразвуковые данные
500 медицинское устройство
502 система лучевой терапии
506 гентри
508 источник лучевой терапии
510 коллиматор
514 криостат
516 сверхпроводящая катушка
518 сверхпроводящая экранирующая катушка
528 катушка для тела
537 система механического позиционирования
538 целевая зона
540 ось вращения гентри
542 пучок излучения
560 инструкции лучевой терапии
600 прием инструкций лучевой терапии, обеспечивающих управление системой лучевой терапии для облучения целевой зоны субъекта
602 управление системой лучевой терапии для облучения целевой зоны с использованием инструкций лучевой терапии и комбинированного сигнала движения
800 изображения от камеры
802 радарное измерение
804 коррелирование и/или комбинирование сигналов
1000 ультразвуковое измерение.








Использование: для магнитно-резонансной визуализации. Сущность изобретения заключается в том, что медицинское устройство дополнительно содержит опору субъекта с опорной поверхностью, выполненной с возможностью поддержки по меньшей мере части субъекта в пределах зоны визуализации. Опора субъекта содержит радарный массив, встроенный под опорной поверхностью. Медицинское устройство дополнительно содержит радарную систему для получения радарного сигнала от субъекта. Медицинское устройство дополнительно содержит систему детектирования движения, выполненную с возможностью получения сигнала перемещения. Исполнение машиноисполняемых инструкций побуждает процессор: непрерывно принимать радарный сигнал; непрерывно принимать сигнал перемещения; непрерывно вычислять объединенный сигнал движения на основании радарной системы и сигнала перемещения; и управлять системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации, при этом сбором данных магнитно-резонансной визуализации управляют с использованием комбинированного сигнала движения. Технический результат: повышение качества магнитно-резонансной визуализации. 3 н. и 12 з.п. ф-лы, 10 ил.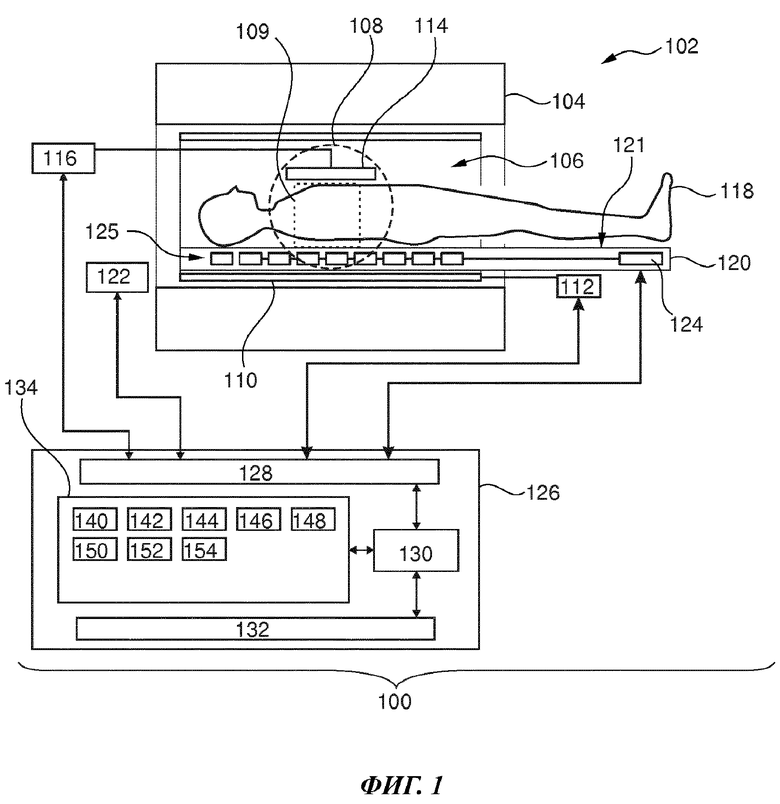
1. Медицинское устройство (100, 300, 400, 500), содержащее систему (102) магнитно-резонансной визуализации для получения данных (150) магнитно-резонансной визуализации из зоны (108) визуализации, при этом медицинское устройство дополнительно содержит:
- опору (120) субъекта, выполненную с возможностью поддержки по меньшей мере части субъекта в зоне визуализации, при этом опора субъекта содержит опорную поверхность (121) для приема субъекта, причем опора субъекта содержит радарный массив (125), в частности, встроенный под опорной поверхностью;
- радарную систему (124) для получения радарного сигнала (144) от субъекта, при этом радарная система содержит радарный массив;
- систему (122) детектирования движения, выполненную с возможностью получения сигнала (146) перемещения от субъекта;
- память (134) для хранения машиноисполняемых инструкций (140) и команд (142) импульсной последовательности;
- процессор (130) для управления медицинским устройством, причем исполнение машиноисполняемых инструкций инициирует выполнение процессором следующего:
- непрерывный прием (200) радарного сигнала от радарной системы;
- непрерывный прием (202) сигнала перемещения от системы детектирования движения;
- непрерывное вычисление (204) комбинированного сигнала (148) движения на основании радарной системы и сигнала перемещения; и
- управление (206) системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации, при этом управление сбором данных магнитно-резонансной визуализации предусмотрено с использованием комбинированного сигнала движения.
2. Медицинское устройство по п. 1, в котором комбинированный сигнал движения содержит любое из следующего: сигнал сердечной фазы движения, сигнал дыхательной фазы движения, сигнал произвольного движения и их комбинации.
3. Медицинское устройство по п. 2, в котором вычисление комбинированного сигнала движения предусмотрено любым путем из следующего:
- кросс-корреляция радарного сигнала с сигналом перемещения для идентификации аналогичных сигналов и отклонения ложных сигналов;
- перемножение радарного сигнала и сигнала перемещения для определения совпадения радарного сигнала и сигнала перемещения; и
- сложение радарного сигнала с сигналом перемещения с использованием корректирующего фазового сдвига.
4. Медицинское устройство по п. 3, в котором комбинированный сигнал движения является непрерывно вычисляемым с использованием алгоритма (154) машинного обучения.
5. Медицинское устройство по п. 4, в котором исполнение машиноисполняемых инструкций дополнительно инициирует выполнение процессором следующего:
- прием предварительного радарного сигнала от радарной системы;
- прием предварительного сигнала перемещения от системы детектирования движения, причем получение предварительного сигнала перемещения предусмотрено одновременно с предварительным радарным сигналом;
- прием сигнала сердечного ритма от монитора сердечного ритма, при этом сигнал сердечного ритма является получаемым одновременно с предварительным радарным сигналом;
- прием сигнала дыхания от монитора дыхания, при этом получение сигнала дыхания предусмотрено одновременно с предварительным радарным сигналом; и
- обучение алгоритма машинного обучения с использованием предварительного радарного сигнала, предварительного сигнала перемещения, сигнала сердечного ритма и сигнала дыхания.
6. Медицинское устройство по п. 4, в котором алгоритм машинного обучения является алгоритмом статистического обучения без учителя, причем исполнение машиноисполняемых инструкций дополнительно инициирует выполнение процессором обучения алгоритма машинного обучения «на лету» при приеме радарного сигнала и сигнала перемещения.
7. Медицинское устройство по п. 2 или 3, в котором один из сигнала перемещения и радарного сигнала обеспечивает сигнал сердечного движения, а другой из сигнала перемещения и радарного сигнала обеспечивает сигнал движения тела, причем исполнение машиноисполняемых инструкций дополнительно инициирует выполнение процессором вычисления векторного поля движения с использованием сигнала сердечного движения и сигнала движения тела, при этом предусмотрена очистка от шумов сигнала сердечного движения с использованием векторного поля движения.
8. Медицинское устройство по п. 1, в котором сигнал движения включает в себя движение грудной клетки, причем система детектирования движения содержит камеру для детектирования движения грудной клетки.
9. Медицинское устройство по п. 8, в котором система магнитно-резонансной визуализации дополнительно содержит дистанционно управляемое крепление (324) камеры, выполненное с возможностью дистанционного наведения камеры, при этом исполнение машиноисполняемых инструкций дополнительно инициирует выполнение процессором следующего:
- определение места (350) фокусировки с помощью радарного сигнала; и
- управление дистанционно управляемым креплением камеры для наведения камеры на место фокусировки.
10. Медицинское устройство по п. 1, в котором система детектирования движения содержит систему (422) ультразвуковой визуализации.
11. Медицинское устройство по п. 10, в котором система ультразвуковой визуализации содержит массив ультразвуковых преобразователей, распределенных по опорной поверхности, или система ультразвуковой визуализации представляет собой систему с высокоинтенсивным фокусированным ультразвуком (HIFU), установленную на опоре субъекта.
12. Медицинское устройство по п. 10 или 11, в котором система ультразвуковой визуализации имеет регулируемое поле обзора, при этом исполнение машиноисполняемых инструкций дополнительно инициирует выполнение процессором следующего:
- определение места (350) фокусировки с помощью радарного сигнала; и
- управление регулируемым полем обзора так, чтобы место фокусировки находилось в пределах регулируемого поля обзора.
13. Медицинское устройство по любому из предшествующих пунктов, в котором медицинское устройство дополнительно содержит систему лучевой терапии, причем исполнение машиноисполняемых инструкций дополнительно инициирует выполнение процессором следующего:
- прием (600) инструкций лучевой терапии, обеспечивающих управление системой лучевой терапии для облучения целевой зоны субъекта; и
- управление (602) системой лучевой терапии для облучения целевой зоны с использованием инструкций лучевой терапии и комбинированного сигнала движения, при этом комбинированный сигнал движения используют для изменения инструкций лучевой терапии и/или стробирования облучения системой лучевой терапии.
14. Компьютерно-читаемый носитель, содержащий компьютерный программный продукт, содержащий машиноисполняемые инструкции (140), обеспечивающие управление медицинским устройством (100, 300, 400, 500), причем медицинское устройство содержит систему (102) магнитно-резонансной визуализации для получения данных (150) магнитно-резонансной визуализации из зоны (108) визуализации, при этом медицинское устройство содержит опору (120) субъекта, выполненную с возможностью поддержки по меньшей мере части субъекта в зоне визуализации, причем опора субъекта содержит опорную поверхность (121) для приема субъекта, при этом опора субъекта содержит радарный массив (125), встроенный под опорной поверхностью, при этом медицинское устройство дополнительно содержит радарную систему (124) для получения радарного сигнала от субъекта, при этом радарная система содержит радарный массив, причем медицинское устройство дополнительно содержит систему (122) детектирования движения, выполненную с возможностью получения сигнала (146) перемещения от субъекта, причем исполнение машиноисполняемых инструкций инициирует выполнение процессором следующего:
- непрерывный прием (200) радарного сигнала от радарной системы;
- непрерывный прием (202) сигнала перемещения от системы детектирования движения;
- непрерывное вычисление (204) комбинированного сигнала (148) движения на основании радарной системы и сигнала перемещения; и
- управление (206) системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации, при этом управление сбором данных магнитно-резонансной визуализации предусмотрено с использованием комбинированного сигнала движения.
15. Способ эксплуатации медицинского устройства (100, 300, 400, 500), причем медицинское устройство содержит систему (102) магнитно-резонансной визуализации для получения данных (150) магнитно-резонансной визуализации из зоны (108) визуализации, при этом медицинское устройство содержит опору (120) субъекта, выполненную с возможностью поддержки по меньшей мере части субъекта в зоне визуализации, причем опора субъекта содержит опорную поверхность (121) для приема субъекта, при этом опора субъекта содержит радарный массив (125), встроенный под опорной поверхностью, при этом медицинское устройство дополнительно содержит радарную систему (124) для получения радарного сигнала от субъекта, при этом радарная система содержит радарный массив, причем медицинское устройство дополнительно содержит систему (122) детектирования движения, выполненную с возможностью получения сигнала (146) перемещения от субъекта, причем способ включает в себя следующее:
- непрерывно принимают (200) радарный сигнал от радарной системы;
- непрерывно принимают (202) сигнал перемещения от системы детектирования движения;
- непрерывно вычисляют (204) комбинированный сигнал (148) движения на основании радарной системы и сигнала перемещения; и
- управляют (206) системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации, при этом сбором данных магнитно-резонансной визуализации управляют, используя комбинированный сигнал движения.
| US 2014073908 A1, 13.03.2014 | |||
| US 5636636 A, 10.06.1997 | |||
| US 5502385 A, 26.03.1996 | |||
| US 20110116683 A1, 19.05.2011 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ МАГНИТНОГО РЕЗОНАНСА | 1999 |
|
RU2216751C2 |
| КАРДИОСИНХРОНИЗАТОР МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ | 1996 |
|
RU2103916C1 |

