ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройствам для обработки с помощью энергии, в частности к использованию терапевтической системы для применения излучения к предварительно выбранной анатомической области субъекта.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Визуализационный контроль с помощью интегрированной системы магнитно-резонансной томографии (МРТ) и линейных ускорителей (LINAC) во время радиотерапии становится все более важным и получает в последние годы широкое применение. Целью данной системы является доставка точной дозы излучения до выбранной мишени внутри тела на основании МР-изображений диагностического качества. Как правило, источник LINAC помещают на вращающийся гентри около магнита аппарата для МРТ, и магнит конструируют так, чтобы LINAC вращался в области нулевого поля магнита.
Целевое положение, в которое направлен пучок, является существенным параметром, который влияет на разрушение ткани вдоль пучка и общую безопасность лечения. Могут быть необходимы эффективное управление позиционированием и использование такой системы.
Документ EP 2624915 A1 раскрывает радиотерапевтическую систему с визуальным контролем и экранированную радиочастотную детекторную катушку для использования в ней. Международная заявка WO2014/044635 раскрывает LINAC под контролем системы магнитно-резонансной томографии. Система магнитно-резонансной томографии содержит радиочастотную катушку с опорными маркерами. Эти маркеры визуализируют, оценивают их положение и вычисляют положение радиочастотной катушки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Различные варианты осуществления предлагают терапевтическую систему, улучшенный способ работы медицинского аппарата и улучшенный медицинский аппарат, как описано в объектах независимых пунктов формулы изобретения. Предпочтительные варианты осуществления описаны в зависимых пунктах формулы изобретения.
В одном аспекте настоящее изобретение относится к терапевтической системе, содержащей магнитно-резонансный модуль, содержащий главный магнит и опору пациента, выполненную с возможностью перемещения в зону исследования в главном магните или из нее; радиотерапевтическое устройство, выполненное с возможностью доставки и направления радиотерапевтического пучка вдоль оси в предварительно определенное целевое положение в зоне визуализации; РЧ-катушку, соединенную с опорой пациента, причем РЧ-катушка снабжена множеством опорных маркеров, которые выполнены с возможностью испускания магнитно-резонансных сигналов; систему позиционирования для позиционирования опоры пациента; блок прерывания; память для хранения машинно-выполняемых команд; и процессор, причем выполнение машинно-выполняемых команд предписывает процессору:
a. управлять системой позиционирования таким образом, чтобы перемещать опору пациента;
b. управлять модулем МРТ таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров;
c. реконструировать с использованием данных МРТ представление изображения первого набора опорных маркеров;
d. вычислять положение РЧ-катушки с использованием положения первого набора опорных маркеров на реконструированном изображении;
e. управлять блоком прерывания таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, на основании вычисленного положения;
f. повторять этапы a)-e) с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению, причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
Второй набор опорных маркеров может содержать по меньшей мере первый набор опорных маркеров, за исключением нуля или более опорных маркеров из одного или нескольких опорных маркеров. Кроме того, второй набор опорных маркеров может дополнительно содержать один или несколько опорных маркеров из множества опорных маркеров, которые не являются частью первого набора опорных маркеров. РЧ-катушка может представлять собой передающую и/или приемную катушку.
Например, в случае, если множество опорных маркеров могут быть деактивированы (отключены или выключены), этап a) дополнительно содержит активацию (подключение или включение) первого набора опорных маркеров. Активированный (деактивированный) опорный маркер может в ответ на РЧ-возбуждения испускать (не испускать) когерентные магнитно-резонансные сигналы (например, РЧ-катушка может по-прежнему не получать сигнал от деактивированных опорных маркеров или получать слабый сигнал, но сигнал является минимальным/некогерентным, например вследствие подавления, и поэтому может добавлять немного шума). Опорные маркеры могут также быть встроены в держатель РЧ-катушки.
Блок прерывания (spoiler) может представлять собой блок управления модуля МРТ, например электронный переключатель, такой как диодная цепь переключения, соединенный по меньшей мере с РЧ-катушкой, для управления РЧ-катушкой, например для сдвига резонансной частоты РЧ-катушки, и/или для управления градиентной катушкой для сдвига или включения и выключения градиентного поля, например градиентного поля выбора среза.
Блок прерывания может представлять собой блок управления модуля МРТ, который управляет РЧ-катушкой и/или градиентной катушкой таким образом, чтобы осуществлять РЧ-прерывание (RF spoiling) и/или градиентное прерывание (gradient spoiling), соответственно. РЧ- прерывание и градиентное прерывание могут использоваться таким образом, чтобы сигналы не были испущены от опорных маркеров, или чтобы сигналы, испущенные от опорных маркеров, не были (не могли быть) когерентно приняты РЧ-катушкой.
В другом примере блок прерывания может быть обернут вокруг каждого из множества маркеров. Он может представлять собой, например, миниатюрный соленоид вокруг опорного маркера, например имеющего сферическую форму.
Множество опорных маркеров может включать в себя диполи, имеющие первую резонансную частоту, отличную от резонансной частоты протонов. Возбуждение магнитного резонанса может содержать возбуждение магнитного резонанса в диполях первого набора опорных маркеров. Возбуждение может дополнительно содержать возбуждение диполей в целевом объеме пациента (например, целевом объеме рядом с опорными маркерами), причем возбуждение обоих диполей может быть одновременно выполнено с помощью импульсов общей или отдельных радиочастот. Диполи в целевом объеме имеют вторую резонансную частоту, которая является резонансной частотой протонов. Это может быть полезным, поскольку РЧ-импульсы опорных маркеров не мешают возбуждению спинов целевого объема, и сигнал опорных маркеров не перекрывает важную морфологическую информацию от пациента.
В соответствии с одним вариантом осуществления выполнение машинно-выполняемых команд дополнительно предписывает процессору управлять радиотерапевтическим устройством таким образом, чтобы доставлять энергию в целевой объем в предварительно определенном целевом положении с использованием полученных данных МРТ с помощью РЧ-катушки, находящейся в вычисленном положении, которое соответствует целевому положению.
В соответствии с одним вариантом осуществления выполнение машинно-выполняемых команд дополнительно предписывает процессору перемещать радиотерапевтическое устройство для доставки энергии в целевой объем во второе предварительно определенное целевое положение и повторять этапы a)-f) для второго предварительно определенного целевого положения.
Эти признаки могут обеспечивать точные и надежные процедуру и/или планирование терапии, поскольку ее выполняют под контролем точного процесса визуализации с использованием точно позиционированной РЧ-катушки. Изображения, которые используют для контроля радиотерапевтического устройства, точно отражают положение целевого объема, который облучают с помощью радиотерапевтического устройства.
Подавление сигналов по меньшей мере части опорных маркеров может уменьшать артефакты на реконструированных изображениях, что может в свою очередь повышать точность позиционирования РЧ-катушки по сравнению со случаем, когда сигналы всех исходных маркеров не подавляют до окончания позиционирования РЧ-катушки, и, что более важно, давать возможность полного выключения маркеров (или подавления сигналов от опорных маркеров) при выполнении визуализации во время лучевой терапии. Это полезно, поскольку подавленные сигналы опорных маркеров не могут искажать алгоритмы автоматического детектирования движения ткани, что могло бы иметь место, если бы маркеры были видимыми, или если бы сигнал маркеров имел возможность накладываться на сигнал ткани на изображениях.
В соответствии с одним вариантом осуществления определение соответствия вычисленного положения целевому положению на этапе f) содержит сравнение расстояния между вычисленным положением и целевым положением с предварительно определенным пороговым значением минимального расстояния соответствия; в ответ на определение того, что данное расстояние меньше, чем предварительно определенное пороговое значение минимального расстояния соответствия, определение уровня излучения в вычисленном положении; в ответ на определение того, что уровень излучения выше, чем предварительно определенный максимально допустимый уровень излучения, переопределение порогового значения минимального расстояния соответствия и повторение этапов a-e) с использованием переопределенного порогового значения минимального расстояния соответствия.
Например, уровень излучения может быть определен как мощность дозы, например со значениями 0-250 MU/мин.
Избыточное излучение РЧ-катушки может вызывать индуцированный излучением ток (RIC) в получаемых данных МРТ, что может оказывать воздействие на отношение сигнал-шум (SNR) МР-изображения. Данный вариант осуществления может обеспечивать баланс между точным позиционированием РЧ-катушки и защитой РЧ-катушки от избытка излучения. Это может дополнительно повышать качество изображения, создаваемого модулем МРТ, поскольку можно контролировать потерю SNR визуализации, который растет с ростом мощности дозы. В результате может быть достигнуто дальнейшее повышение точности/надежности терапевтической процедуры, поскольку терапия может быть основана на изображениях, для которых SNR из-за излучения находится под контролем.
В соответствии с одним вариантом осуществления положение РЧ-катушки вычисляют в по меньшей мере одном пространственном направлении, причем в случае, если вычисленное положение соответствует целевому положению вдоль одного пространственного направления, подавляют магнитно-резонансные сигналы, испущенные от опорного маркера, используемого для вычисления положения вдоль данного одного пространственного направления.
В соответствии с одним вариантом осуществления, в случае если вычисленное положение соответствует целевому положению, подавление содержит определение участков с артефактами в данных МРТ и подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, которые соответствуют участкам с артефактами.
Данный вариант осуществления может быть предпочтительным, поскольку он может экономить ресурсы, которые иначе бы требовались для подавления, и снова делает возможным испускание сигналов от опорных маркеров, которые не вызывают артефакты на реконструированных изображениях.
В другом аспекте настоящее изобретение относится к медицинскому аппарату, содержащему: магнитно-резонансный модуль, содержащий главный магнит и опору пациента, выполненную с возможностью перемещения в зону исследования в главном магните или из нее; РЧ-катушку, соединенную с опорой пациента, причем РЧ-катушка снабжена множеством опорных маркеров, которые выполнены с возможностью испускания магнитно-резонансных сигналов; систему позиционирования для позиционирования опоры пациента; блок прерывания; память для хранения машинно-выполняемых команд; и процессор, причем выполнение машинно-выполняемых команд предписывает процессору:
a. управлять системой позиционирования таким образом, чтобы перемещать опору пациента;
b. управлять модулем МРТ таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров;
c. реконструировать с использованием данных МРТ представление изображения первого набора опорных маркеров;
d. вычислять положение РЧ-катушки с использованием положения первого набора опорных маркеров на реконструированном изображении;
e. управлять блоком прерывания таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, на основании вычисленного положения;
f. повторять этапы a)-e) с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению, причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
Данные признаки могут быть полезными, поскольку они могут обеспечивать точное положение РЧ-катушки с использованием опорных маркеров. Промежуточное отключение по меньшей мере части опорных маркеров может уменьшать артефакты на промежуточных реконструированных изображениях, что может в свою очередь повышать точность позиционирования РЧ-катушки по сравнению со случаем, когда все исходные маркеры сохраняются до окончания позиционирования РЧ-катушки, и что более важно, давать возможность полного выключения (или подавления сигналов от опорных маркеров) при выполнении визуализации, например во время лучевой терапии. Это полезно, поскольку подавленные сигналы опорных маркеров не могут искажать алгоритмы автоматического детектирования движения ткани, что могло бы иметь место, если бы маркеры были видимыми, или если бы сигнал маркеров имел возможность накладываться на сигнал ткани на изображениях. Международная заявка WO2013/011444 упоминает поверхностную РЧ-катушку, снабженную пассивным маркером положения. Опорные маркеры, связанные с магнитно-резонансной приемной катушкой, также упомянуты в международной заявке WO2006/025001.
В соответствии с одним вариантом осуществления медицинский аппарат дополнительно содержит радиотерапевтическое устройство, выполненное с возможностью доставки и направления радиотерапевтического пучка вдоль оси в предварительно определенное целевое положение в зоне визуализации.
В соответствии с одним вариантом осуществления соответствие вычисленного положения целевому положению на этапе f) содержит: сравнение расстояния между вычисленным положением и целевым положением с предварительно определенным пороговым значением минимального расстояния соответствия; в ответ на определение того, что данное расстояние меньше, чем предварительно определенное пороговое значение минимального расстояния соответствия, определение уровня излучения в вычисленном положении; в ответ на определение того, что уровень излучения выше, чем предварительно определенный максимально допустимый уровень излучения, переопределение порогового значения минимального расстояния соответствия и повторение этапов a-e) с использованием переопределенного порогового значения минимального расстояния соответствия.
Избыточное излучение РЧ-катушки может вызывать индуцированный излучением ток (RIC) в получаемых данных МРТ, что может оказывать воздействие на отношение сигнал-шум (SNR) МР-изображения. Данный вариант осуществления может обеспечивать баланс между точным позиционированием РЧ-катушки и защитой РЧ-катушки от избытка излучения. Это может дополнительно повышать качество изображения, создаваемого МР-модулем, поскольку можно контролировать потерю SNR визуализации, который растет с ростом мощности дозы.
В соответствии с одним вариантом осуществления этап a) дополнительно содержит управление системой позиционирования для остановки опоры пациента в предварительно определенное время остановки, причем повторение этапов a)-e) приводит к одной или нескольким итерациям, причем предварительно определенное время остановки для заданной итерации определяют с использованием вычисленного на предыдущей итерации положения.
Предварительно определенное время остановки для первой итерации определяют с использованием вычисленного положения при исходном (или первом) выполнении этапов a)-e).
Данный вариант осуществления может быть предпочтительным, поскольку он может обеспечивать, например, точное и быстрое замедление, даже когда выполняется визуализации маркеров с интервалом, который не является пренебрежимо малым по отношению к скорости опоры пациента - положение опоры пациента может быть экстраполировано по известным скорости, инерции и времени получения изображения с использованием стандартной методологии в теории управления.
В соответствии с одним вариантом осуществления повторение этапов a)-e) приводит к одной или нескольким итерациям, причем модулем МРТ управляют таким образом, чтобы получать данные МРТ с увеличением пространственной точности с числом итераций.
В соответствии с одним вариантом осуществления сканирование положений маркеров (например, для определения положений маркеров) может чередоваться с быстрой поисковой визуализацией. Это может быть полезным, поскольку может делать возможной предварительную обработку данных пациента, например для автоматического позиционирования 3D набора изображений на представляющий интерес объем посредством автоматического детектирования анатомических ориентиров в тот момент, когда опора пациента останавливается в предполагаемом месте назначения. Это упрощает рабочий процесс и использует в ином случае уходящее вхолостую время, затрачиваемое на движение стола.
Увеличение пространственного разрешения может быть полезным, поскольку оно может делать возможным точное вычисление положения опорных маркеров, в частности в случае, если количество маркеров, которые испускают сигналы, уменьшается с увеличением числа итераций.
В соответствии с одним вариантом осуществления опорные маркеры включают диполи, причем подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, содержит применение по меньшей мере одного из РЧ-прерывания и градиентного прерывания.
РЧ-прерывание может содержать управление фазой РЧ-импульсов таким образом, что РЧ-импульсы передаются РЧ-катушкой на определенной частоте и фазе. Модулем МРТ можно дополнительно управлять для приема только сигнала с этой определенной фазой, например, модуль МРТ не принимает поперечную намагниченность с другими фазами или положениями в поперечной плоскости. В данном случае определенные частоты и фазы можно использовать для возбуждения диполей, отличных от диполей опорных маркеров.
Градиентное прерывание может содержать использование осуществляющего выбор среза, фазокодирующего и частотнокодирующего градиентов для расфазировки остаточной поперечной намагниченности (RTM), так что она становится некогерентной в начале следующего повторения. Для этого можно использовать миниатюрную катушку/элемент тока для создания локальной неоднородности у опорного маркера.
В соответствии с одним вариантом осуществления подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, содержит расфазировку диполей с помощью блока прерывания посредством создания градиентного магнитного поля в области, соответствующей опорным маркерам (например, для введения смещения в поле B0, которое возникает после прикладывания полей градиентных катушек). В данном случае, например, блок прерывания может представлять собой миниатюрную катушку/элемент тока, которые можно использовать для создания локальной неоднородности поля (например, для сдвига поя B0) в области, соответствующей опорному маркеру.
В соответствии с одним вариантом осуществления опорные маркеры содержат диполи, имеющие первую резонансную частоту, причем возбуждение магнитного резонанса в опорных маркерах осуществляют с использованием возбуждающих РЧ-импульсов, генерируемых РЧ-катушкой по меньшей мере на первой резонансной частоте, причем подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, содержит динамическое изменение частоты (напряженности поля) возбуждающих РЧ-импульсов для генерации РЧ-импульсов на второй резонансной частоте.
В соответствии с одним вариантом осуществления способ содержит вычисление положения РЧ-катушки в по меньшей мере одном пространственном направлении, причем в случае, если вычисленное положение соответствует целевому положению вдоль одного пространственного направления, подавляют магнитно-резонансные сигналы, испущенные от опорного маркера, используемого для вычисления положения вдоль данного одного пространственного направления.
В соответствии с одним вариантом осуществления в случае, если вычисленное положение соответствует целевому положению, подавление содержит определение участков с артефактами в данных МРТ и подавление испускание магнитно-резонансных сигналов от опорных маркеров, которые соответствуют участкам с артефактами.
В соответствии с одним вариантом осуществления подавление магнитно-резонансных сигналов, испущенных от опорного маркера, осуществляют, если уровень артефактов соответствующего участка с артефактами выше, чем предварительно определенный уровень артефактов. Уровень артефактов может быть определен посредством оценки маркеров изображений реконструированных изображений. Маркер изображения можно получить, например, посредством измерения наивысшего SNR с небольшой величиной фильтрации в области, которая указана, по перекрестной корреляции с формой маркера, как содержащая маркер.
В другом аспекте настоящее изобретение относится к способу управления медицинским аппаратом. Медицинский аппарат содержит: магнитно-резонансный модуль, содержащий главный магнит и опору пациента, выполненную с возможностью перемещения в зону исследования в главном магните или из нее; РЧ-катушку, соединенную с опорой пациента, причем РЧ-катушка снабжена множеством опорных маркеров, которые выполнены с возможностью испускания магнитно-резонансных сигналов; систему позиционирования для позиционирования опоры пациента; и блок прерывания. Данный способ содержит:
a. управление системой позиционирования таким образом, чтобы перемещать опору пациента;
b. управление модулем МРТ таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров;
c. реконструкцию с использованием данных МРТ представления изображения первого набора опорных маркеров;
d. вычисление положения РЧ-катушки с использованием положения первого набора опорных маркеров на реконструированном изображении;
e. управление блоком прерывания таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, на основании вычисленного положения;
f. повторение этапов a)-e) с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению, причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
В другом аспекте настоящее изобретение относится к компьютерному программному продукту, содержащему выполнимые компьютером команды для выполнения этапов способа вышеуказанного способа.
В другом аспекте настоящее изобретение относится к медицинскому аппарату, содержащему магнитно-резонансный модуль, содержащий главный магнит и опору пациента, выполненную с возможностью перемещения в зону исследования в главном магните или из нее; РЧ-катушку, соединенную с опорой пациента; систему позиционирования для позиционирования опоры пациента; память для хранения машинно-выполняемых команд; и процессор, причем выполнение машинно-выполняемых команд предписывает процессору:
i. управлять системой позиционирования таким образом, чтобы перемещать опору пациента;
ii. вычислять положение РЧ-катушки с использованием видеокамеры медицинского аппарата;
iii. повторять этапы i)-ii) до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению.
Данные магнитно-резонансного изображения определяют в настоящем документе как измерения радиочастотных сигналов, испускаемых атомными спинами, зафиксированные с помощью антенны магнитно-резонансного аппарата во время магнитно-резонансного томографического сканирования. Магнитно-резонансное томографическое (МРТ) изображение определяют в настоящем документе как реконструированную двух- или трехмерную визуализацию анатомических данных, содержащихся в магнитно-резонансных томографических данных. Данная визуализация может выполняться с помощью компьютера.
Следует понимать, что один или несколько из вышеупомянутых вариантов осуществления настоящего изобретения могут быть объединены при условии, что комбинированные варианты осуществления не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее будут описаны предпочтительные варианты осуществления настоящего изобретения, только в качестве примера и со ссылками на чертежи, на которых:
фиг. 1 показывает функциональный вид в разрезе терапевтической системы,
фиг. 2 представляет собой блок-схему способа терапевтической процедуры, и
фиг. 3 представляет собой блок-схему альтернативного способа терапевтической процедуры.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее одинаково пронумерованные элементы на фигурах или являются эквивалентными элементами, или выполняют одну и ту же функцию. Элементы, которые были рассмотрены ранее, не обязательно будут рассмотрены в связи с последующими фигурами, если их функция эквивалентна.
Различные структуры, системы и устройства схематически изображены на фигурах только с целью объяснения и таким образом, чтобы не затруднять понимание настоящего изобретения подробностями, которые хорошо известны специалистам в данной области техники. Тем не менее, для описания и объяснения иллюстративных примеров раскрытого объекта включены прилагаемые фигуры.
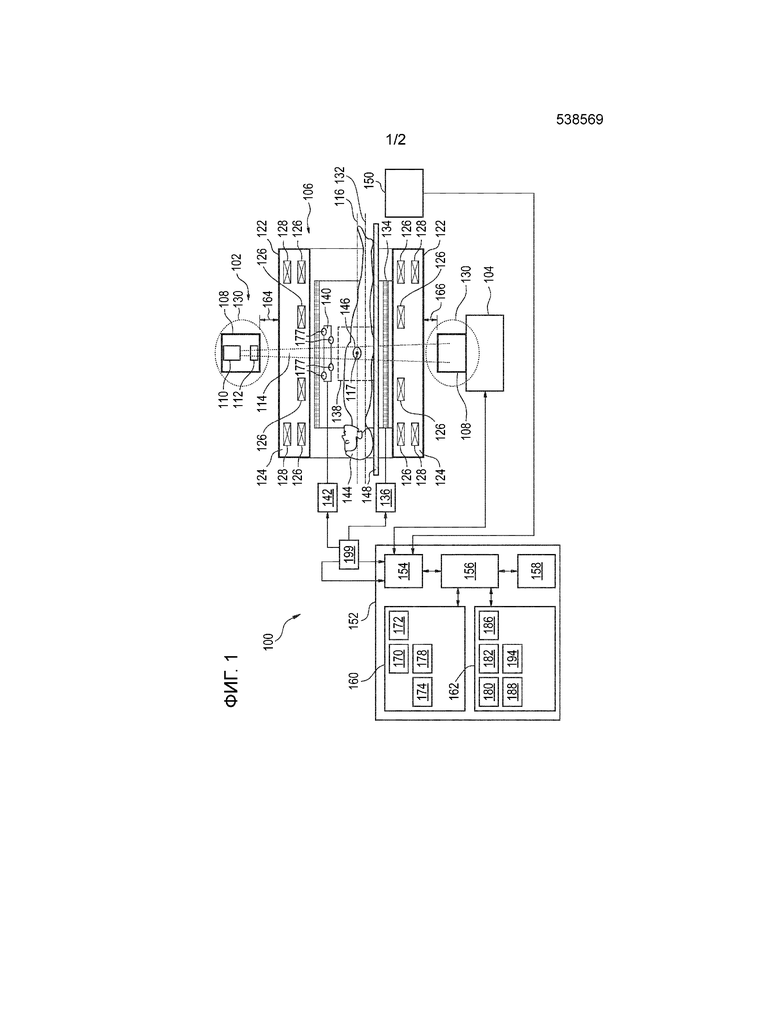
Фиг. 1 показывает функциональный вид в разрезе терапевтической системы 100. Терапевтическая система 100 показана содержащей радиотерапевтический аппарат 102 и модуль 106 для магнитно-резонансной томографии. Радиотерапевтический аппарат 102 содержит кольцевой механизм 108. Кольцевой механизм 108 поддерживает радиотерапевтический источник 110. Радиотерапевтический источник 110 типичным и может представлять собой рентгеновский источник LINAC, рентгеновский 2 и радиоизотопный источник гамма-излучения. Рядом с радиотерапевтическим источником 110 расположен многолепестковый коллиматор 112 пучка для коллимации пучка 114 излучения, который генерирует радиотерапевтический источник 110. Кольцевой механизм 108 также выполнен с возможностью перемещения, например вращения, радиотерапевтического источника 110 и коллиматора 112 пучка относительно точки 117 вращения радиотерапевтического аппарата 102. Ось 116 вращения проходит через точку 117 вращения.
Модуль 106 для магнитно-резонансной томографии показан содержащим главный магнит 122. Кольцевой механизм 108 имеет форму кольца и окружает главный магнит 122. Главный магнит 122, показанный на фиг. 1, представляет собой сверхпроводящий магнит цилиндрического типа. Тем не менее, другие магниты также применимы для вариантов осуществления настоящего изобретения. Главный магнит 122 имеет переохлажденный криостат 124. Внутри криостата 124 расположен набор сверхпроводящих катушек 126. Также существуют компенсационные катушки 128, ток в которых течет противоположно направлению тока в сверхпроводящих катушках 126. Это создает зону 130 слабого магнитного поля, которая окружает или охватывает главный магнит 122. Цилиндрический главный магнит 122 показан имеющим ось 132 симметрии.
В туннеле магнита расположена катушка 134 градиента магнитного поля, которую используют для получения магнитно-резонансных данных изображения для пространственного кодирования объектов в объеме 138 визуализации главного магнита 122. Катушка 134 градиента магнитного поля соединена с источником 136 питания катушки градиента магнитного поля. Предполагается, что катушка 134 градиента магнитного поля является типичной. Как правило, катушки градиента магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Объем 138 визуализации расположен в центре главного магнита 122.
Рядом с объемом 138 визуализации расположена радиочастотная (РЧ) катушка 140 для управления ориентациями магнитных спинов в пределах объема 138 визуализации и для приема передач радиосигналов от спинов также в пределах объема 138 визуализации. Радиочастотная катушка 140 соединена с радиочастотным приемопередатчиком 142. Радиочастотная катушка 140 и радиочастотный приемопередатчик 142 могут быть заменены отдельными передающей и приемной катушками и отдельными передатчиком и приемником. Следует понимать, что радиочастотная катушка 140 и радиочастотный приемопередатчик 142 являются просто типичными.
В центре главного магнита 122 также расположен субъект 144. Субъект 144 имеет целевой объем 146 и показан лежащим на опоре 148 пациента. РЧ-катушка 140 может передавать РЧ-импульсы в целевой объем 146. Опора 148 пациента имеет механическую систему 150 позиционирования. Механическая система 150 позиционирования выполнена с возможностью позиционирования опоры 148 пациента в пределах главного магнита 122. В зависимости от доступного пространства внутри главного магнита 122 механическая система 150 позиционирования может перемещать опору 148 пациента в различных направлениях, включая направление, перпендикулярное оси 132 магнита. Если есть больше доступного пространства внутри главного магнита 122, механическая система 150 позиционирования может иметь больше степеней свободы. Например, механическая система 150 позиционирования может позиционировать опору 148 пациента с шестью степенями свободы.
Радиочастотная катушка 140 может быть соединена с опорой 148 пациента. РЧ-катушка 140 снабжена множеством опорных маркеров 177, которые выполнены с возможностью испускания магнитно-резонансных сигналов в ответ на РЧ-импульс возбуждения.
Радиочастотный приемопередатчик 142, источник 136 питания катушки градиента магнитного поля, механический привод 104 и механическая система 150 позиционирования показаны соединенными с аппаратным интерфейсом 154 компьютерной системы 152. Компьютерная система 152 использует процессор 156 для управления терапевтической системой 100 и, например, для активации или управления блоком 199 прерывания, представляющим собой, например, электронный переключатель для расстройки и настройки РЧ-катушки 140 и/или катушки 134 градиента магнитного поля. В другом примере, блок 199 прерывания может оборачиваться вокруг каждой из по меньшей мере части опорных маркеров, например, он может представлять собой миниатюрный соленоид вокруг опорного маркера (имеющего сферическую форму).
Блок 199 прерывания может содержать электронный переключатель, который переключается между выключенным и включенным состояниями для расстройки и настройки РЧ-катушки 140 на предварительно выбранную резонансную частоту. Электронный переключатель может содержать по меньшей мере один полевой транзистор (FET).
Прерывающий элемент (например, блок прерывания) может быть реализован посредством переключения логического сигнала режима катушки: при использовании прерывания ток PIN направляется через катушку или для смещения поля b0, или, в режиме разделения, для создания (изменяющегося со временем) градиента в объеме маркера. Направление может быть реализовано с помощью переключателей на FET. Катушка может представлять собой отдельную катушку расстройки, или специальную приемную катушку вокруг маркера можно повторно использовать для целей прерывания, когда прием не нужен.
Компьютерная система 152, показанная на фиг. 1, является типичной. Для представления функциональности, проиллюстрированной одной этой компьютерной системой 152, можно использовать множество процессоров и компьютерных систем. Компьютерная система 152 содержит аппаратный интерфейс 154, который позволяет процессору 156 посылать и принимать сообщения для компонентов терапевтической системы 100. Процессор 156 также соединен с пользовательским интерфейсом 158, компьютерным устройством 160 хранения и компьютерной памятью 162. Радиотерапевтический аппарат 102 не показан соединенным с аппаратным интерфейсом 154. Радиотерапевтический аппарат 102 может быть, например, соединен с аппаратным интерфейсом 154 и осуществляет связь с компьютерной системой 152 посредством механического привода 104.
Для примера, показанного на фиг. 1, ось 116 вращения радиотерапевтического аппарата не является коаксиальной оси 132 магнита. Точка 117 вращения показана смещенной от центра и от оси 132 магнита. Можно видеть, что целевая зона 146 смещена от центра и в стороне от оси 132 магнита. Радиотерапевтический аппарат 102 перемещен посредством механического привода 104, так что точка 117 вращения радиотерапевтического аппарата расположена в пределах целевой зоны 146. Можно видеть, что кольцевой механизм 108 перемещен по отношению к магниту 122.
Пучок 114 излучения проходит через точку 117 вращения. Помещение точки 117 вращения в центр целевой зоны 146 позволяет непрерывно обрабатывать целевую зону, когда пучок 114 излучения создается радиотерапевтическим источником 110 и вращается с помощью кольцевого механизма 108.
Компьютерное устройство 160 хранения показано содержащим магнитно-резонансные данные 170 изображения, которые были получены с помощью модуля 106 для магнитно-резонансной томографии. Компьютерное устройство 160 хранения показано дополнительно содержащим диагностические изображения (то есть представление изображения) 172, которые были реконструированы из магнитно-резонансных данных изображения. Компьютерное устройство 160 хранения показано дополнительно содержащим координаты 174 целевого объема 146. Компьютерное устройство 160 хранения показано дополнительно содержащим сигналы 178 управления радиотерапией.
Компьютерная память 162 содержит машинно-выполняемые команды 180, 182, 186, 188, 194 для выполнения процессором 156. Компьютерная память 162 показана содержащей модуль 180 управления терапевтической системой. Модуль 180 управления терапевтической системой содержит машинно-выполняемые команды, которые позволяют процессору 156 управлять общим функционированием терапевтической системы 100. Компьютерная память 162 показана дополнительно содержащей модуль 182 управления радиотерапевтическим аппаратом. Модуль 182 управления радиотерапевтическим аппаратом содержит машинно-выполняемые команды, которые позволяют процессору 156 управлять функционированием радиотерапевтического аппарата 102.
Компьютерная память 162 показана дополнительно содержащей модуль 186 управления магнитно-резонансной томографией. Модуль 186 управления магнитно-резонансной томографией содержит машинно-выполняемый код, который позволяет процессору 156 управлять функционированием и работой модуля 106 для магнитно-резонансной томографии. Компьютерная память 162 показана дополнительно содержащей модуль 188 реконструкции изображений. Модуль 188 реконструкции изображений содержит машинно-выполняемый код, который используется процессором 156 для преобразования магнитно-резонансных данных 170 изображения в изображения 172.
Компьютерная память 162 показана дополнительно содержащей модуль 194 генерации сигнала управления радиотерапией. Модуль 194 генерации сигнала управления радиотерапией содержит выполнимый компьютером код, который процессор 156 использует для генерации сигналов 178 управления радиотерапией. Сигналы 178 управления радиотерапией могут быть сгенерированы в соответствии с координатами 174 целевого объема 146.
Компьютерная память 162 также содержит выполнимый компьютером код, который позволяет процессору 156 выполнять по меньшей мере часть описанного ниже способа.
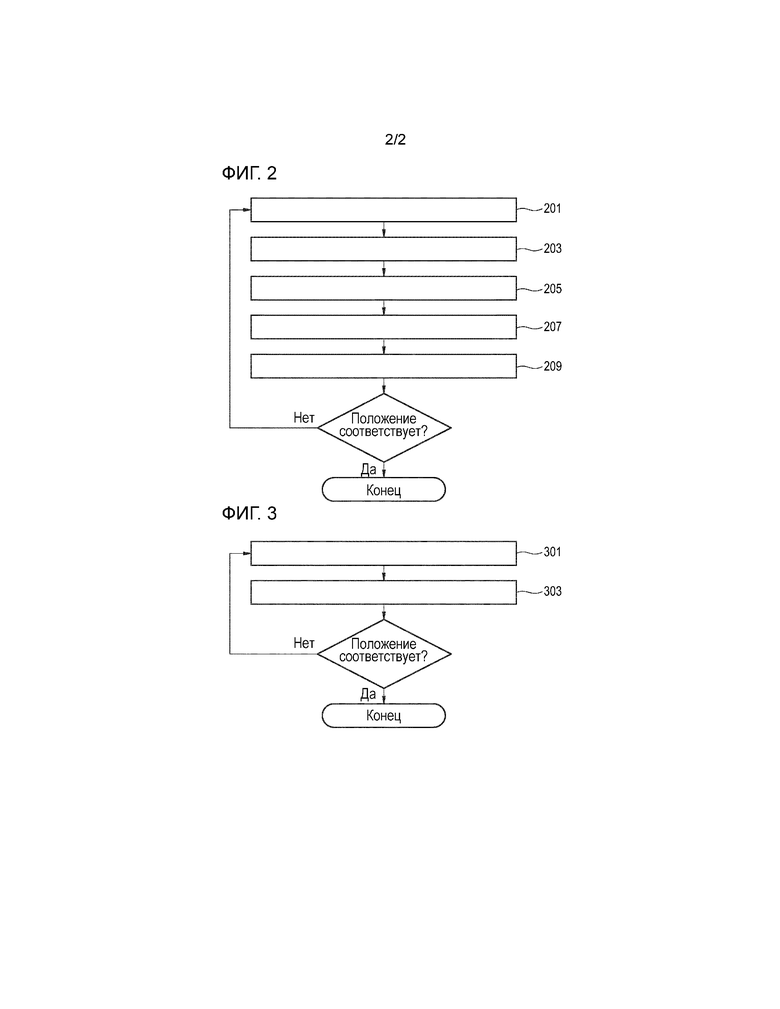
Фиг. 2 представляет собой блок-схему способа позиционирования РЧ-катушки, например 140, медицинского аппарата, такого как система 100 или часть системы 100, содержащего модуль 106 для магнитно-резонансной томографии, содержащий главный магнит 122 и опору 148 пациента. РЧ-катушка 140 соединена с опорой 148 пациента. РЧ-катушка 140 снабжена множеством опорных маркеров 177, которые выполнены с возможностью испускания магнитно-резонансных сигналов. Медицинский аппарат содержит систему 150 позиционирования для позиционирования опоры 1148 пациента. Медицинский аппарат дополнительно содержит память 162 для хранения машинно-выполняемых команд; и процессор 156. Медицинский аппарат может дополнительно содержать блок 199 прерывания, как описано выше.
Множество опорных маркеров 177 может иметь неферромагнитные оболочки, которые образуют сферическую полость, заполненную жидким или гелеобразным соединением, которое содержит изотоп фтора Fl19. Спин-решеточному времени релаксации фтора в соединении, предпочтительно, придают подходящее небольшое значение (обычно несколько десятков миллисекунд) посредством добавления к нему парамагнитного вещества, например небольшого количества CuSO4 или MnCl. При 0,23 T резонансная частота фтора составляет приблизительно 9,2 МГц; и резонансная частота протонов составляет приблизительно 9,8 МГц. Разница достаточно велика для того, чтобы сигналы резонирующих протонов и резонирующего фтора можно было различить. Резонансные частоты достаточно близки, так что можно использовать одни и те же передающие, приемные катушки для возбуждения и приема сигналов резонанса как резонирующих протонов, так и резонирующего фтора. В качестве альтернативы, катушку с двойной настройкой настраивают на обе резонансные частоты.
Для дифференциации по размеру по меньшей мере один опорный маркер больше, чем другой из множества реперов. Разница по размеру от 20% до 60% является предпочтительной, поскольку такую величину разницы по размеру легко детектировать на магнитно-резонансном изображении. Разница по размеру позволяет смотреть на реконструированное изображение опорных маркеров для ориентирования изображения при учете априорного знания положения опорных маркеров. Например, когда на РЧ-катушке 140 установлены три опорных маркера, имеющих другой размер опорный маркер может быть установлен ближе к вставному концу РЧ-катушки 140. Для определения ориентации также можно использовать априорное знание промежутков между реперами, окружающей анатомии и тому подобного. В качестве альтернативы, полые полости опорных маркеров могут иметь различные формы, такие как кресты, кубики и тому подобное. Следует обращать внимание на выбор форм, которые остаются уникальными и дифференцируемыми при получении проекции изображения вдоль любого направления. Например, опорные маркеры могут представлять собой небольшую пару сфер или цилиндров размером мм - и могут быть включены в жесткие части РЧ-катушки 140.
На этапе 201 системой 150 позиционирования управляют таким образом, чтобы перемещать опору 148 пациента, например системой 150 позиционирования управляют таким образом, чтобы непрерывно перемещать опору 148 пациента. Перемещение опоры 148 пациента, в частности после определения промежуточного положения РЧ-катушки 140, может учитывать физические характеристики, такие как известные характеристики ускорения/замедления. Перемещение может осуществляться по меньшей мере в одном направлении.
На этапе 203 модулем МРТ можно управлять, например с использованием модуля 186 управления магнитно-резонансной томографией, таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров. Например, РЧ-катушкой 140 можно управлять таким образом, чтобы возбуждать и принимать сигналы резонанса как резонирующих протонов в целевом объеме, так и резонирующего фтора в первом наборе опорных маркеров.
На этапе 205 представление изображения первого набора опорных маркеров может быть реконструировано с использованием модуля 188 реконструкции изображений с использованием данных МРТ. Поскольку сигналы резонанса пространственно кодируются с помощью частоты, и поскольку центральные частоты спектров резонанса фтора и протонов сдвинуты, модуль 188 реконструкции изображений реконструирует опорные и протонные изображения по-отдельности. Необязательно, сдвиг частоты может быть добавлен к сигналам фтора для компенсации разницы резонансных частот.
Данные опорных маркеров реконструируют с помощью модуля 188 реконструкции изображений и сохраняют в компьютерной памяти 162. Изображения субъекта могут быть сохранены в компьютерной памяти 162 и могут быть наложены или иным образом объединены модулем 188 реконструкции изображений для получения одного изображения (например, представления изображения первого набора опорных маркеров), показывающего положение первого набора опорных маркеров по отношению к выбранным частям визуализируемой анатомии. Необязательно, изображения реконструируют в виде изображений двумерных проекций.
На этапе 207 положение РЧ-катушки 140 может быть вычислено с использованием положения первого набора опорных маркеров на реконструированном изображении.
Первый набор опорных маркеров может быть детектирован по реконструированному изображению посредством использования, например, перекрестной корреляции с известными формами маркеров. Например, по положению первого набора опорных маркеров на реконструированном изображении калькулятор положения, например, модуля 188 реконструкции изображений вычисляет ориентацию и пространственное расположение по отношению к изображению пациента РЧ-катушки 140. Например, калькулятор положения может отслеживать два или более опорных маркера первого набора маркеров первого размера, которые находятся в известной взаимосвязи (например, выровнены) с осью РЧ-катушки 140, для идентификации их ориентации. Можно отслеживать другой идентифицируемый репер или расстояние между тремя или более опорными маркерами первого набора маркеров для определения того, каким образом РЧ-катушка 140 повернута или ориентирована вдоль оси. Аналогичное отслеживание внеосевых реперов указывает вращательную ориентацию РЧ-катушки 140. И, наконец, определение "центра масс" визуализированного первого набора опорных маркеров указывает расположение соответствующей точки на РЧ-катушка 140 вдоль идентифицированной оси. Также могут быть рассмотрены другие алгоритмы позиционирования.
На этапе 209 блоком 199 прерывания можно управлять таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, на основании вычисленного положения. Например, положение РЧ-катушки 140 может быть вычислено в по меньшей мере одном пространственном направлении. В случае, если вычисленное положение соответствует целевому положению, например 117, вдоль одного пространственного направления, подавляют магнитно-резонансные сигналы, испущенные от опорного маркера, используемого для вычисления положения вдоль данного одного пространственного направления.
Этапы 201)-209) можно повторять с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению, причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
Конечное вычисленное положение может быть подтверждено посредством визуализации опоры 148 пациента в стационарном этапе. После подтверждения все оставшиеся опорные маркеры, которые все еще активны или включены, могут быть выключены.
Фиг. 3 представляет собой блок-схему альтернативного способа позиционирования РЧ-катушки, например 140, медицинского аппарата, такого как система 100 или часть системы 100, содержащего модуль 106 для магнитно-резонансной томографии, содержащий главный магнит 122 и опору 148 пациента. РЧ-катушка 140 соединена с опорой 148 пациента. РЧ-катушка 140 снабжена множеством оптических излучателей, которые выполнены с возможностью их отслеживания с помощью оптических систем, таких как одна или несколько видеокамер. Видеокамера может быть расположена снаружи или внутри главного магнита 122, или может быть интегрирована в РЧ-катушку 140. Кроме того, видеокамеру можно использовать в комбинации с дополнительной оптикой, такой как линзы, зеркала или оптические волокна. Видеокамера может быть предварительно установлена таким образом, чтобы она была совмещена с физической структурой РЧ-катушки 140 в МР-модуле и итоговым изображением. Для того чтобы детектировать излучатели, видеокамера может иметь оптические излучатели в пределах прямой видимости. Медицинский аппарат дополнительно содержит систему 150 позиционирования для позиционирования опоры 1148 пациента. Медицинский аппарат дополнительно содержит память 162 для хранения машинно-выполняемых команд; и процессор 156.
На этапе 301 системой 150 позиционирования управляют таким образом, чтобы перемещать опору 148 пациента, например системой 150 позиционирования управляют таким образом, чтобы непрерывно перемещать опору 148 пациента. Перемещение может осуществляться по меньшей мере в одном направлении.
На этапе 303 одной или несколькими видеокамерами можно управлять таким образом, чтобы вычислять положение РЧ-катушки с их использованием. Например, одна или несколько видеокамер могут непрерывно отслеживать положение оптических (или световых) излучателей, расположенных на РЧ-катушке 140. Изображения от одной или нескольких видеокамер можно использовать для триангуляции положений источников света. При этом может быть измерено положение РЧ-катушки. Например, когда РЧ-катушку 140 помещают на опору 148 пациента, видеокамеру фокусируют на РЧ-катушке 122, и по изображению, сделанному видеокамерой, осуществляют анализ положения РЧ-катушки, например в калькуляторе положения модуля 188 реконструкции изображений. Когда РЧ-катушка 140 расположена в туннеле, полученные данные положения можно использовать для регулировки положения опоры пациента.
Этапы 301-303 можно повторять до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению, например 117.
В альтернативном варианте осуществления положение РЧ-катушки может быть определено с использованием комбинации этапа 303 и этапов 203-207 способа (например, этап 207 может дополнительно содержать этап 303). В данном случае, РЧ-катушка 140 может быть снабжена множеством оптических излучателей, а также множеством опорных маркеров. Например, положение, определенное на этапе 303, можно использовать для перекрестной проверки положения, определенного на этапах 203-207, причем повторение этапов 201)-209) осуществляют до тех пор, пока оба определенных положения не будут соответствовать предварительно определенному целевому положению. Это может дополнительно повышать точность позиционирования и терапевтической процедуры, как описано выше.
В альтернативном варианте осуществления положение РЧ-катушки 140 может быть первоначально (или исходно) определено с использованием способа опорных маркеров, как описано выше, например этапов 203-207, до тех пор, пока вычисленное положение РЧ-катушки не достигнет предварительно определенного положения, при котором уровень излучения находится на максимально допустимом уровне излучения, за пределами которого опорные маркеры нельзя надежно использовать. После достижения этого предварительно определенного положения можно вместо способа опорных маркеров для вычисления положения РЧ-катушки использовать видеокамеру, как описано на этапе 303, до тех пор, пока вычисленное положение не будет соответствовать конечным целевым положениям. Это может дополнительно повышать точность позиционирования и терапевтической процедуры, как описано выше.
Как будет понятно специалисту в данной области техники, аспекты настоящего изобретения могут быть воплощены в виде аппарата, способа или компьютерного программного продукта. соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая программно-аппаратное обеспечение, резидентное программное обеспечение, микрокод и так далее) или варианта осуществления, объединяющего программный и аппаратный аспекты, которые могут, как правило, все вместе называться в настоящем документе "схемой", "модулем" или "системой". Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного в одном или нескольких машиночитаемых носителях, имеющих выполнимый компьютером код, включенный в них.
Может быть использована любая комбинация одного или нескольких машиночитаемых носителей. Машиночитаемый носитель может представлять собой машиночитаемую сигнальную среду или машиночитаемый носитель для хранения. 'Машиночитаемый носитель хранения', как используется в настоящем документе, охватывает все материальные носители хранения, которые могут хранить команды, которые могут быть выполнены процессором вычислительного устройства. Машиночитаемый носитель хранения может называться невременным машиночитаемым носителем хранения. Машиночитаемый носитель хранения может также называться материальным машиночитаемым носителем. В некоторых вариантах осуществления машиночитаемый носитель для хранения может также быть способен хранить данные, которые могут быть доступны для процессора вычислительного устройства. Примеры машиночитаемых носителей для хранения включают, но без ограничения: гибкий диск, накопитель на магнитных жестких дисках, твердотельный жесткий диск, флеш-память, USB флеш-накопитель, память с произвольным доступом (RAM), память, доступную только для чтения (ROM), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают компакт-диски (CD) и универсальные цифровые диски (DVD), например диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин машиночитаемый носитель для хранения также относится к различным типам носителей для записи, пригодных для доступа со стороны компьютерного устройства через сеть или линию связи. Например, данные можно извлекать через модем, через интернет или через локальную сеть. Выполнимый компьютером код, включенный в машиночитаемую носитель, можно передавать, используя любую соответствующую среду, включая, но без ограничения, беспроводную, проводную, оптоволоконный кабель, РЧ и так далее, или любую подходящую комбинацию вышеперечисленного.
Машиночитаемая сигнальная среда может включать распространяющийся сигнал данных с выполнимым компьютером кодом, включенным в него, например в основной полосе частот или как часть несущей волны. Такой распространяющийся сигнал может принимать любую из множества форм, включая, но без ограничения, электромагнитную, оптическую или любую их подходящую комбинацию. Машиночитаемая сигнальная среда может представлять собой любую машиночитаемую среду, которая не является машиночитаемым носителем хранения, и которая может передавать, распространять или переносить программу для использования посредством системы, аппарата или устройства выполнения команд или в соединении с ними.
'Компьютерная память' или 'память' является примером машиночитаемого носителя для хранения. Компьютерная память представляет собой любую память, которая непосредственно доступна процессору. 'Компьютерное устройство хранения' или 'устройство хранения' является другим примером машиночитаемого носителя для хранения. Компьютерное устройство хранения представляет собой любой энергонезависимый машиночитаемый носитель для хранения. В некоторых вариантах осуществления компьютерное устройство хранения может также представлять собой компьютерную память или наоборот.
'Процессор', как используется в настоящем документе, охватывает электронный компонент, который способен выполнять программу, или машинно-выполняемую команду, или выполнимый компьютером код. Упоминания вычислительного устройства, содержащего "процессор", следует интерпретировать как, возможно, содержащие более чем один процессор или процессорное ядро. Процессор может, например, представлять собой многоядерный процессор. Процессором может также называться группа процессоров, расположенная в одной компьютерной системе или распределенная между множеством компьютерных систем. Термин вычислительное устройство следует также интерпретировать как, возможно, относящийся к группе или сети вычислительных устройств, причем каждое содержит процессор или процессоры. Выполнимый компьютером код может выполняться множеством процессоров, которые могут быть расположены в одном вычислительном устройстве, или которые могут даже быть распределены между множеством вычислительных устройств.
Выполнимый компьютером код может содержать машинно- выполняемые команды или программу, которая предписывает процессору осуществлять аспект настоящего изобретения. Выполнимый компьютером код для выполнения операций для аспектов настоящего изобретения может быть написан на любой комбинации одного или нескольких языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ или тому подобное, и обычные процедурные языки программирования, такие как язык программирования "C" или схожие языки программирования, и скомпилирован в машинно-выполнямые команды. В некоторых случаях выполнимый компьютером код может иметь форму языка высокого уровня или предварительно скомпилированную форму и использоваться в сочетании с интерпретатором, который генерирует машинно-выполняемые команды на лету.
Выполнимый компьютером код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем случае удаленный компьютер может быть соединен с компьютером пользователя через любой тип сети, включая локальную вычислительную сеть (LAN) или глобальную сеть (WAN), или может быть осуществлено соединение с внешним компьютером (например, через интернет с помощью поставщика услуг интернета).
Аспекты настоящего изобретения описаны со ссылкой на структурную схему, иллюстрации и/или блок-схемы способов, аппаратов (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления настоящего изобретения. Следует понимать, что каждый блок или часть блоков структурной схемы, иллюстраций и/или блок-схем могут быть реализованы с помощью команд компьютерной программы в форме выполнимого компьютером кода, когда это применимо. Следует также понимать, что, когда они не являются взаимоисключающими, комбинации блоков в различных структурных схемах, иллюстрациях и/или блок-схемах могут быть объединены. Данные команды компьютерной программы могут быть предоставлены процессору компьютера общего назначения, специализированного компьютера или другого программируемого устройства обработки данных для создания машины, так что команды, которые выполняются посредством процессора компьютера или другого программируемого устройства обработки данных, создают средство для воплощения функций/действий, определенных в блоке или блоках структурной схемы и/или блок-схемы.
Эти команды компьютерной программы могут также храниться в машиночитаемом носителе, который может управлять компьютером, другим программируемым устройством обработки данных или другими устройствами таким образом, чтобы они функционировали определенным образом, так что команды, сохраненные в машиночитаемом носителе, производят готовое изделие, включая команды, которые реализуют функцию/действие, определенное в блоке или блоках структурной схемы и/или блок-схемы.
Команды компьютерной программы могут также быть загружены на компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы вызвать осуществление ряда рабочих операций на компьютере, другом программируемом устройстве или других устройствах для создания реализуемого компьютером процесса, так что команды, которые выполняются на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, определенных в блоке или блоках структурной схемы и/или блок-схемы.
'Пользовательский интерфейс', как используется в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. 'Пользовательский интерфейс' может также называться 'устройством для взаимодействия с человеком'. Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может позволять получение компьютером ввода от оператора и может предоставлять пользователю вывод от компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, и данный интерфейс может позволять компьютеру показывать результат операторского управления или манипуляции. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером предоставления информации оператору. Получение данных посредством клавиатуры, мыши, трекбола, сенсорной панели, тензометрического джойстика, графического планшета, джойстика, геймпада, веб-камеры, гарнитуры, переключателей скорости, рулевого колеса, педалей, перчатки виртуальной реальности, танцевального коврика, устройства дистанционного управления и акселерометра являются примерами компонентов пользовательского интерфейса, которые позволяют получение информации или данных от оператора.
'Аппаратный интерфейс', как используется в настоящем документе, охватывает интерфейс, который позволяет процессору компьютерной системы взаимодействовать с внешним вычислительным устройством и/или аппаратом и/или управлять ими. Аппаратный интерфейс может позволять процессору посылать управляющие сигналы или команды на внешнее вычислительное устройство и/или аппарат. Аппаратный интерфейс может также позволять процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры аппаратного интерфейса включают, но без ограничения: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, беспроводное соединение с локальной сетью, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, интерфейс MIDI, интерфейс аналогового ввода и интерфейс цифрового ввода.
'Дисплей' или 'дисплейное устройство', как используется в настоящем документе, охватывает устройство вывода или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, аудио- и/или тактильные данные. Примеры дисплея включают, но без ограничения: монитор компьютера, телевизионный экран, сенсорный экран, сенсорный электронный дисплей, экран Брайля, электронно-лучевую трубку (ЭЛТ), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскоэкранный дисплей, вакуумный флюоресцентный дисплей (VF), дисплеи на светоизлучающих диодах (СИД), электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светоизлучающих диодах (OLED), проектор и головной дисплей.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
100 терапевтическая система
102 радиотерапевтический аппарат
104 механический привод
106 модуль для магнитно-резонансной томографии
108 кольцевой механизм
110 радиотерапевтический источник
112 многолепестковый коллиматор пучка
114 пучок излучения
116 ось вращения
117 точка вращения
122 главный магнит
124 криостат
126 сверхпроводящая катушка
128 компенсационная катушка
130 зона слабого магнитного поля
132 ось магнита
134 катушка градиента магнитного поля
136 источник питания катушки градиента магнитного поля
138 объем визуализации
140 радиочастотная катушка
142 радиочастотный приемопередатчик
144 субъект
146 целевой объем
148 опора пациента
150 механическая система позиционирования
152 компьютерная система
154 аппаратный интерфейс
156 процессор
158 пользовательский интерфейс
160 компьютерное устройство хранения
162 компьютерная память
164 верхнее расстояние
166 нижнее расстояние
170 магнитно-резонансные данные изображения
172 диагностические изображения
174 координаты целевого объема
177 опорные маркеры
178 сигналы управления радиотерапией
180 модуль управления терапевтическим аппаратом
182 модуль управления радиотерапевтическим аппаратом
186 модуль управления магнитно-резонансной томографией
188 модуль реконструкции изображений
194 модуль генерации сигнала управления радиотерапией
199 блок прерывания.
Использование: для облучения предварительно выбранной анатомической области субъекта. Сущность изобретения заключается в том, что радиотерапевтическое устройство выполнено с возможностью доставки и направления радиотерапевтического пучка вдоль оси в предварительно определенное целевое положение в зоне визуализации в МР-модуле (в магнитно-резонансном модуле) терапевтической системы. Предварительно определенное целевое положение соответствует положению РЧ-катушки МР-модуля. Технический результат: обеспечение баланса между точным позиционированием РЧ-катушки и защитой РЧ-катушки от избытка излучения с целью повышения качества изображения, создаваемого модулем МРТ, и, как следствие, повышение точности/надежности терапевтической процедуры. 4 н. и 11 з.п. ф-лы, 3 ил.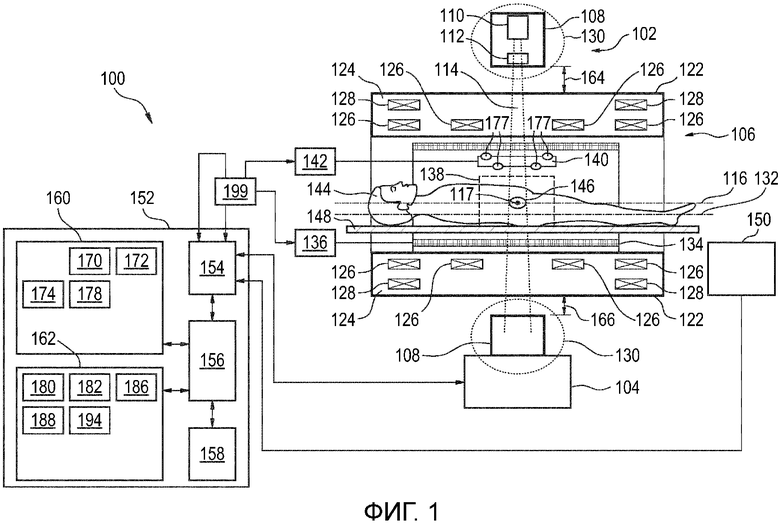
1. Терапевтическая система (100), содержащая:
- модуль (106) магнитно-резонансной томографии, содержащий главный магнит (122) и опору пациента (148), выполненную с возможностью перемещения в зону (138, 146) исследования в главном магните (122) или из нее;
- радиотерапевтическое устройство (102), выполненное с возможностью доставки и направления радиотерапевтического пучка вдоль оси в предварительно определенное целевое положение (117) в зоне (138, 146) исследования;
- РЧ-катушку (140), соединенную с опорой пациента (148), причем РЧ-катушка (140) снабжена множеством опорных маркеров (177), которые выполнены с возможностью испускания магнитно-резонансных сигналов;
систему позиционирования (150) для позиционирования опоры пациента (148);
- блок (199) прерывания для подавления магнитно-резонансных сигналов, испущенных от одного или нескольких опорных маркеров;
- память (162) для хранения машинно-выполняемых команд (180-194); и
- процессор (156), причем выполнение машинно-выполняемых команд предписывает процессору:
a. управлять системой позиционирования (150) таким образом, чтобы перемещать опору пациента (148);
b. управлять модулем (106) МРТ таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров (177);
c. реконструировать с использованием данных МРТ представление изображения первого набора опорных маркеров;
d. вычислять положение РЧ-катушки (140) с использованием положения первого набора опорных маркеров на реконструированном изображении;
e. управлять блоком (199) прерывания таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, в зависимости от вычисленного положения по отношению к предварительно определенному целевому положению;
f. повторять этапы a)-e) с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению (117), причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
2. Терапевтическая система по п. 1, в которой определение соответствия вычисленного положения целевому положению на этапе f) содержит:
- сравнение расстояния между вычисленным положением и целевым положением (117) с предварительно определенным пороговым значением минимального расстояния соответствия;
- в ответ на определение того, что данное расстояние меньше, чем предварительно определенное пороговое значение минимального расстояния соответствия, определение уровня излучения в вычисленном положении;
- в ответ на определение того, что уровень излучения выше, чем предварительно определенный максимально допустимый уровень излучения, переопределение порогового значения минимального расстояния соответствия и повторение этапов a-e) с использованием переопределенного порогового значения минимального расстояния соответствия.
3. Терапевтическая система по любому из предшествующих пунктов, в которой положение РЧ-катушки (140) вычисляют в по меньшей мере одном пространственном направлении, причем в случае, если вычисленное положение соответствует целевому положению вдоль одного пространственного направления, подавляют магнитно-резонансные сигналы, испущенные от опорного маркера, используемого для вычисления положения вдоль данного одного пространственного направления.
4. Терапевтическая система по любому из предшествующих пунктов, в которой в случае, если вычисленное положение соответствует целевому положению, подавление содержит определение участков с артефактами в данных МРТ и подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, которые соответствуют участкам с артефактами.
5. Медицинский аппарат, содержащий:
- магнитно-резонансный модуль (106), содержащий главный магнит (122) и опору пациента (148), выполненную с возможностью перемещения в зону (138, 146) исследования в главном магните (122) или из нее;
- РЧ-катушку (140), соединенную с опорой пациента (148), причем РЧ-катушка (140) снабжена множеством опорных маркеров (177), которые выполнены с возможностью испускания магнитно-резонансных сигналов;
- систему позиционирования (150) для позиционирования опоры пациента (148);
- блок (199) прерывания для подавления магнитно-резонансных сигналов, испущенных от одного или нескольких опорных маркеров;
- память (162) для хранения машинно-выполняемых команд (186, 188); и
- процессор (156), причем выполнение машинно-выполняемых команд предписывает процессору:
a. управлять системой позиционирования (150) таким образом, чтобы перемещать опору пациента (148);
b. управлять модулем (106) МРТ таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров (177);
c. реконструировать с использованием данных МРТ представление изображения первого набора опорных маркеров;
d. вычислять положение РЧ-катушки (140) с использованием положения первого набора опорных маркеров на реконструированном изображении;
e. управлять блоком (199) прерывания таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, на основании вычисленного положения по отношению к предварительно определенному целевому положению (117);
f. повторять этапы a)-e) с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению (117), причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
6. Медицинский аппарат по п. 5, дополнительно содержащий радиотерапевтическое устройство (102), выполненное с возможностью доставки и направления радиотерапевтического пучка вдоль оси в предварительно определенное целевое положение (117) в зоне (138, 146) визуализации.
7. Медицинский аппарат по любому из предшествующих пп. 5-6, в котором соответствие вычисленного положения с целевым положением на этапе f) содержит:
- сравнение расстояния между вычисленным положением и целевым положением (117) с предварительно определенным пороговым значением минимального расстояния соответствия;
- в ответ на определение того, что данное расстояние меньше, чем предварительно определенное пороговое значение минимального расстояния соответствия, определение уровня излучения в вычисленном положении;
- в ответ на определение того, что уровень излучения выше, чем предварительно определенный максимально допустимый уровень излучения, переопределение порогового значения минимального расстояния соответствия и повторение этапов a-e) с использованием переопределенного порогового значения минимального расстояния соответствия.
8. Медицинский аппарат по любому из предшествующих пунктов, причем этап a) дополнительно содержит управление системой позиционирования (150) для остановки опоры пациента (148) в предварительно определенное время остановки, причем повторение этапов a)-e) приводит к одной или нескольким итерациям, причем предварительно определенное время остановки для заданной итерации определяют с использованием вычисленного на предыдущей итерации положения.
9. Медицинский аппарат по любому из предшествующих пп. 5-8, в котором повторение этапов a)-e) приводит к одной или нескольким итерациям, причем модулем (106) МРТ управляют таким образом, чтобы получать данные МРТ с увеличением пространственной точности с числом итераций.
10. Медицинский аппарат по любому из предшествующих пп. 5-9, в котором опорные маркеры (177) включают диполи, причем подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, содержит применение по меньшей мере одного из РЧ-прерывания и градиентного прерывания.
11. Способ по любому из предшествующих пп. 5-10, содержащий вычисление положения РЧ-катушки (140) в по меньшей мере одном пространственном направлении, причем в случае, если вычисленное положение соответствует целевому положению (117) вдоль одного пространственного направления, подавляют испускание магнитно-резонансных сигналов от опорного маркера, используемого для вычисления положения вдоль данного одного пространственного направления.
12. Медицинский аппарат по любому из предшествующих пп. 5-11, в котором в случае, если вычисленное положение соответствует целевому положению (117), подавление содержит определение участков с артефактами в данных МРТ и подавление магнитно-резонансных сигналов, испущенных от опорных маркеров, которые соответствуют участкам с артефактами.
13. Медицинский аппарат по п. 12, в котором осуществляют подавление магнитно-резонансных сигналов, испущенных от опорного маркера, если уровень артефактов соответствующего участка с артефактами выше, чем предварительно определенный уровень артефактов.
14. Способ управления медицинским аппаратом, причем медицинский аппарат содержит модуль (106) магнитно-резонансной томографии, содержащий главный магнит (122) и опору пациента (148), выполненную с возможностью перемещения в зону (138, 146) исследования в главном магните (122) или из нее; РЧ-катушку (140), соединенную с опорой пациента (148), причем РЧ-катушка (140) снабжена множеством опорных маркеров (177), которые выполнены с возможностью испускания магнитно-резонансных сигналов; систему позиционирования (150) для позиционирования опоры пациента (148); и блок (199) прерывания, при этом способ содержит:
a. управление системой позиционирования (150) таким образом, чтобы перемещать опору пациента (148);
b. управление модулем (106) МРТ таким образом, чтобы получать данные МРТ, реагирующие на возбуждение магнитного резонанса в по меньшей мере первом наборе множества опорных маркеров (177);
c. реконструкцию с использованием данных МРТ представления изображения первого набора опорных маркеров;
d. вычисление положения РЧ-катушки (140) с использованием положения первого набора опорных маркеров на реконструированном изображении;
e. управление блоком (199) прерывания таким образом, чтобы подавлять магнитно-резонансные сигналы, испущенные от одного или нескольких опорных маркеров первого набора опорных маркеров, на основании вычисленного положения;
f. повторение этапов a)-e) с использованием второго набора опорных маркеров множества опорных маркеров в качестве первого набора опорных маркеров до тех пор, пока вычисленное положение не будет соответствовать предварительно определенному целевому положению (117), причем второй набор опорных маркеров содержит по меньшей мере первый набор опорных маркеров.
15. Машиночитаемый носитель, имеющий компьютерную программу, содержащую выполнимые компьютером команды для выполнения этапов способа в соответствии со способом по п. 14.
| WO 2014044635 A1, 27.03.2014 | |||
| US 2005080333 A1, 14.04.2005 | |||
| US 6889073 B2, 03.05.2005 | |||
| US 6119032 A, 12.09.2000 | |||
| СПОСОБ НАПРАВЛЕНИЯ ОБОРУДОВАНИЯ ДЛЯ ЛУЧЕВОЙ ТЕРАПИИ | 2006 |
|
RU2410136C2 |
| RU 2004132187 A, 20.01.2006. | |||

