Изобретение относится к области педагогики, в частности к педагогике профессионально-технического образования и среднего специального образования (инклюзивное образование), социальной педагогике, и может быть использовано для реабилитации и социализации молодых инвалидов с сохранным интеллектом и людей с ограниченными возможностями здоровья (ОВЗ), имеющих следующие заболевания: необратимые последствия перенесенных травм периферических нервов, нарушение слуха, аутизм, глухонемота и др., через профессиональную подготовку по рабочим специальностям (слесарному, кулинарному, токарному, ювелирному, швейному делу и т.д.) путем применения роботометода, который является эффективным для реабилитации и социализации инвалидов и учащихся с ограниченными возможностями здоровья в условиях инклюзивного профессионального образования. Роботометод применяют и как средство обучения в процессе подготовки учащихся по рабочим профессиям.
Известен способ психологической реабилитации детей с нарушениями в развитии интеллекта на базе компьютерной синергической системы (RU 2120314, МПК A61M 21/00, A61B 5/16, опубл. 20.10.1998). Способ включает проведение занятий в игровом режиме, предъявление зрительной информации и проговаривание речевого материала в виде слов и предложений в форме диалога. Предварительно формируют по возрастающей сложности артикуляции звука, слова, простейшие предложения и соответствующие по смыслу, лексической структуре видеообразы; ребенку предъявляют полученную информацию в возрастающей сложности, искажают ее путем изменения степени неразборчивости речи и "смазанности" изображения, в процессе предъявления изменяют степень искажения и добиваются безошибочной речи и понимания ситуации ребенком.
Известен способ кондуктивно-педагогической реабилитации больных детским церебральным параличом, включающий обучение ребенка методистом и педагогом умению выполнять мотивационные движения в игровой форме с помощью спортивного снаряда с речевым выделением смысла выполняемого действия. На первом этапе методист, а затем методист совместно с педагогом при участии других детей демонстрируют перед обучаемым ребенком игровой комплекс, создавая в сознании ребенка положительные эмоции; затем предъявляют в качестве мотивации к проявлению функциональных движений спортивный снаряд, представляющий собой знакомый ребенку предмет или игрушку, ориентируют движения на него, при этом, когда обучаемый производит движения, педагог одновременно с ним выполняет мотивационные движения, поддерживая ребенка за кисти рук и ощущая его мышечные реакции, помогает ребенку выбрать из случайных его движений целенаправленное, корректируя направление к мотивационному предмету; затем в игровой форме формируют двигательный стереотип путем повторения мотивационных целенаправленных движений (RU 2272606, МПК A61H 1/00, опубл. 27.03.2006).
Известно использование человекоподобного робота (например, робот NAO: http://autism-aba.blogspot/ru/2013/03/robot-helps-train-children.html) в обучении детей-аутистов. Использование таких роботов позволяет улучшить социальные навыки у детей.
Роботометод - это метод с применением человекоподобного реального или виртуального робота, восполняющий те учебные, учебно-производственные задания (трудовые операции), которые не может выполнить учащийся с инвалидностью с нарушениями умственных или физических недостатков в процессе обучения рабочей профессии в условиях инклюзивного профессионального образования.
Задачей изобретения является повышение эффективности обучения инвалидов и учащихся с ОВЗ в условиях инклюзивного профессионального образования.
Технический результат - успешное освоение инвалидами и учащимися с ОВЗ рабочих профессий (слесарное, кулинарное, токарное, ювелирное, швейное дело и т.д.).
Задача решается, а технический результат достигается способом реабилитации и социализации юношей и девушек с инвалидностью или ограниченными возможностями здоровья (ОВЗ), основанным на роботометоде и включающим совместное обучение учащихся с инвалидностью или ОВЗ и их здоровых сверстников рабочим профессиям в условиях инклюзивного профессионального обучения лицея или колледжа, при котором проводят серию уроков по выбранной рабочей профессии мастером производственного обучения, причем каждый урок включает постановку целей и задач урока, инструктаж по технике безопасности, объяснение новой темы с демонстрацией учащимся конкретных трудовых операций по выбранной рабочей профессии, проведение оздоровительных пауз, психологическое тестирование и диагностику самочувствия, активности и настроения учащихся во время урока, постоянное ведение диалога с учащимися путем одобрения их действий и указания на недостатки, а также подведение итогов урока и объяснение домашнего задания на следующий урок, причем в процессе обучения используют реального человекоподобного робота-тьютора или виртуального человекоподобного робота-тьютора в виде 3D-модели, который восполняет умственные и физические недостатки учащихся с инвалидностью или ОВЗ, при этом перед началом урока программист или мастер производственного обучения с использованием интеллектуального человеко-машинного интерфейса в память блока робота, отвечающего за модель поведения для организации взаимодействия робота с учащимися в процессе целенаправленных действий при их обучении, вводит текущую модель поведения для организации взаимодействия робота с учащимися и мастером производственного обучения при проведении текущего учебного занятия, а диалог с учащимися во время урока осуществляют посредством блока робота «диалоговая система», включающего в свой состав динамик, подсистему синтеза речи и подсистемы артикуляции речи робота - блока «двигательная система», который также используют при демонстрации соответствующих движений ног, рук, тела, головы робота во время урока или физкультурной паузы, причем демонстрацию высокоточных трудовых операций проводят посредством робота-тьютора, используя блок робота «манипуляторы-кисти левой и правой руки робота», а управление блоками «двигательная система», «манипуляторы-кисти левой и правой руки робота», «диалоговая система» осуществляют на основе заложенной в блок «интеллектуальная система управления (ИСУ) робота, реализованная программно в микроконтроллере робота» программы управления поведением робота на основе текущей информации блока «модель поведения для организации взаимодействия робота с учащимися в процессе целенаправленных действий при их обучении», используя информацию, заложенную в блоке «кинематические и динамические модели робота», а также текущую информацию, получаемую с помощью блока «датчики обратной связи для контроля положения двигателей и сервоприводов ног, рук, тела и головы робота», кроме того, для диалога робота с учащимися и мастером производственного обучения также используют блок «сенсорная система», причем для реализации алгоритмов интеллектуального управления поведением робота используют блок «база знаний», реализованные на основе нейросетевых алгоритмов блок «подсистема управления восприятием», блок «подсистема управления поведением робота» и блок «система поддержки принятия решений (СГШР)» для обеспечения стратегии взаимодействия робота и учащихся с использованием следующих шести когнитивных агентов: агент «Слышу-Говорю», реализующий акустичекое восприятие и голосовое общение с учащимися и мастером производственного обучения, агент «Вижу-Слышу-Говорю», реализующий зрительное и акустичекое восприятие и общение робота, агент «Вижу-Перемещаюсь», реализующий зрительное восприятие и целенаправленное перемещение робота среди учащихся в учебном классе, агент «Вижу-Манипулирую», реализующий зрительное восприятие и целенаправленные манипуляции объектами среды, агент «Безопасно-Контактирую», реализующий контроль безопасности и коррекции действий в опасных ситуациях при взаимодействии с людьми, агент «Слышу-Вижу-Учусь», реализующий зрительно-акустическое восприятие и обучение поведению в разных режимах.
Согласно изобретению робот-тьютор во время оздоровительных пауз демонстрирует физические упражнения в игровой форме, а также проводит совместно с психологом психологическое тестирование; учащийся с инвалидностью или ОВЗ проходит обучение в домашних условиях и участвует в уроке онлайн в режиме реального времени с использованием Skype под наблюдением реального мастера производственного обучения.
Сущность изобретения поясняют схемы, где:
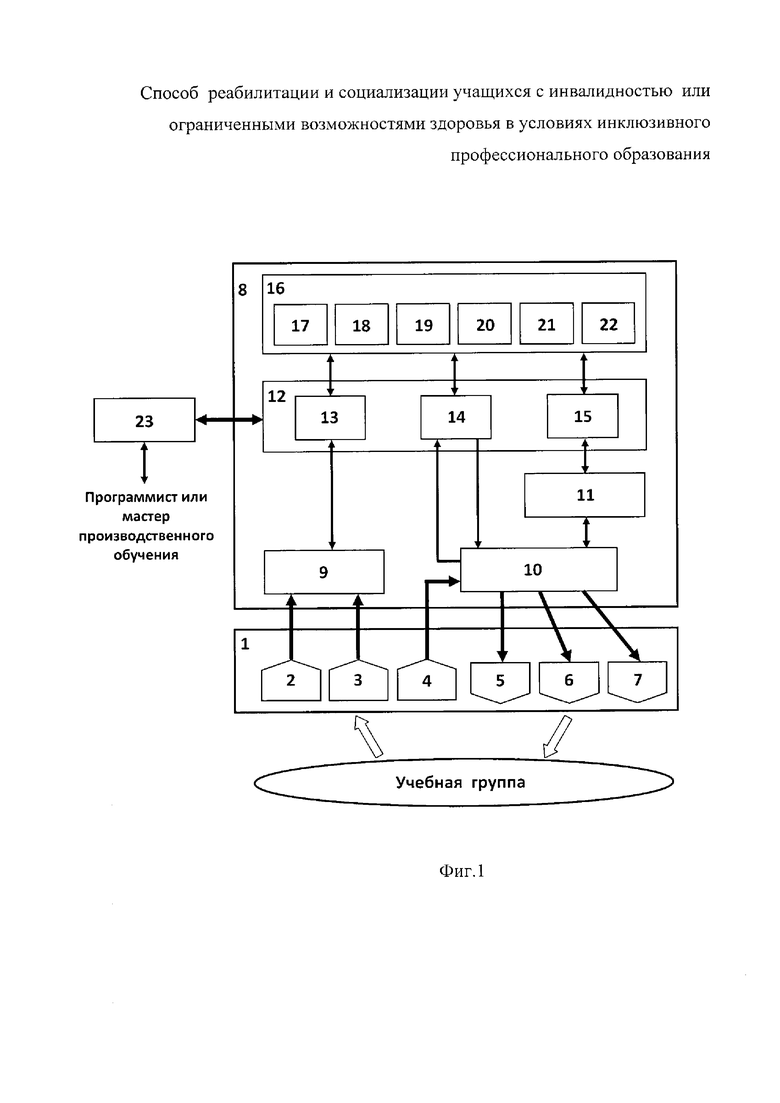
на фиг. 1 показана схема структуры человекоподобного робота-тьютора и его интеллектуальной системы управления;
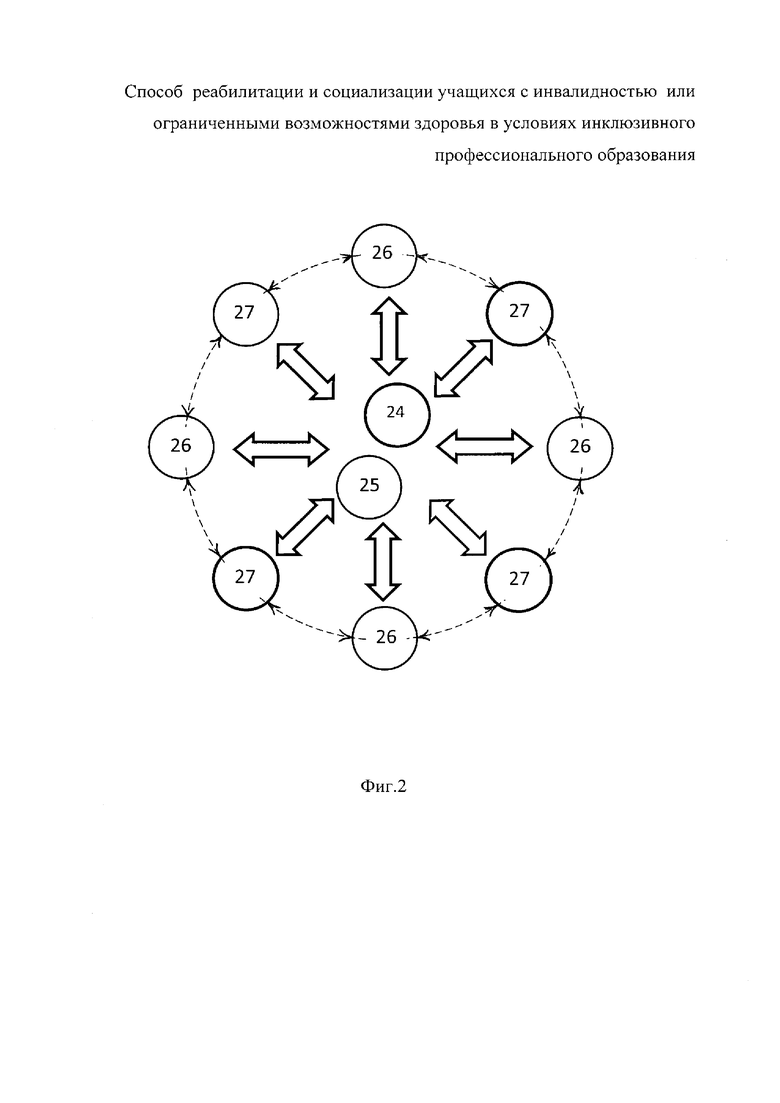
на фиг. 2 - схема, поясняющая проведение физкультминутки в инклюзивной группе, состоящей из учащихся с инвалидностью или ОВЗ и здоровых сверстников.
Структура человекоподобного робота-тьютора (блок 1 на фиг. 1) включает:
2 - сенсорная система, включающая в свой состав два микрофона для ввода речи учащихся, тактильные датчики для воздействия на осязательные рецепторы манипуляторы-кисти левой и правой руки робота;
3 - система технического зрения (СТЗ), включающая в свой состав две видеокамеры и два ультрозвуковых дальномера для обеспечения бинокулярного зрения робота, например, с использованием устройства kinect (Глушко Ю.Э., Бабков B.C. Оценка возможности применения платформы MicrosoftKinect в составе виртуалных тренажеров / Труды научной конференции «Информационные управляющие системы и компьютерный мониторинг» (ИУС и КМ 2012), 2012, С. 700-704);
4 - датчики обратной связи для контроля положения двигателей и сервоприводов ног, рук, тела и головы робота;
5 - двигательная система, включающая в свой состав двигатели и сервоприводы ног, рук, тела, головы и подсистемы артикуляции речи робота;
6 - манипуляторы-кисти левой и правой руки робота;
7 - диалоговая система, включающая в свой состав динамик и подсистему синтеза речи.
На фиг. 1 обозначено:
блок 8 - интеллектуальная система управления (ИСУ) робота, реализованная программно в микроконтроллере робота, которая включает в свой состав:
9 - подсистема управления восприятием;
10 - подсистема управления движением робота;
11 - подсистема управления поведением робота;
12 - база знаний (БЗ) состоит из:
13 - модель окружающего мира для организации начального взаимодействия робота с учащимися, 14 - кинематические и динамические модели робота для организации целенаправленных движений двигательной системы ног, рук, тела, головы и подсистемы артикуляции речи робота, 15 - модель поведения для организации взаимодействия робота с учащимися в процессе целенаправленных действий при их обучении;
16 - система поддержки принятия решений (СППР) для обеспечения стратегии взаимодействия робота и учащихся с использованием следующих шести когнитивных агентов:
17 - агент «Слышу-Говорю», реализующий акустическое взаимодействие с объектами среды (акустичекое восприятие и голосовое общение с учащимися и мастером производственного обучения);
18 - агент «Вижу-Слышу-Говорю», реализующий зрительно-акустическое взаимодействие с объектами среды (зрительное и акустичекое восприятие и общение);
19 - агент «Вижу-Перемещаюсь», реализующий зрительное восприятие и целенаправленное перемещение среди учащихся в учебном классе;
20 - агент «Вижу-Манипулирую», реализующий зрительное восприятие и целенаправленные манипуляции объектами среды;
21 - агент «Безопасно-Контактирую», реализующий контроль безопасности и коррекции действий в опасных ситуациях при взаимодействии с людьми;
22 - агент «Слышу-Вижу-Учусь», реализующий зрительно-акустическое восприятие и обучение поведению в разных режимах;
23 - интеллектуальный человеко-машинный интерфейс.
На фиг. 2 обозначено: 24 - мастер производственного обучения, 25 - человекоподобный робот-тьютор, 26 - учащийся с инвалидностью или ОВЗ, 27 - здоровый сверстник.
Способ осуществляют следующим образом.
Проводят серию уроков по выбранной рабочей профессии мастером производственного обучения, при этом учащихся с инвалидностью или ОВЗ и их здоровых сверстников обучают совместно. Темы уроков и их количество разрабатывают на основе программы и учебного плана в соответствии с федеральными государственными образовательными стандартами для среднего профессионального образования третьего поколения (ФГОС СПО) по конкретной рабочей профессии. Каждый урок включает постановку целей и задач урока, инструктаж по технике безопасности, объяснение новой темы с демонстрацией учащимся трудовых операций по выбранной рабочей профессии, проведение оздоровительных пауз, психологическое тестирование и диагностику самочувствия, активности и настроения учащихся во время урока, постоянное ведение диалога с учащимися путем одобрения их действий и указания на недостатки, а также подведение итогов урока и объяснение домашнего задания на следующий урок, причем в процессе обучения используют реального человекоподобного робота-тьютора либо виртуального в виде 3D-модели.
Перед началом урока (фиг. 1) программистом или мастером производственного обучения с использованием интеллектуального человеко-машинного интерфейса (блок 23) в память блока 15 вводится текущая модель поведения для организации взаимодействия робота с учащимися и мастером производственного обучения при проведении текущего учебного занятия. Диалог с учащимися во время урока (изложение материала, объяснение задания и др.) осуществляется роботом с помощью блока 7 (диалоговая система) и подсистемы артикуляции речи робота блока 5 (двигательная система), который также используется при демонстрации соответствующих движений ног, рук, тела, головы робота (с помощью соответствующих двигателей и сервоприводов) во время урока или физкультурной паузы. Для демонстрации высокоточных трудовых операций используется блок 6 - манипуляторы-кисти левой и правой руки робота. Управление блоками 5, 6 и 7 осуществляется на основе заложенной в блок 8 программы управления поведением робота, на основе текущей информации блока 15, программы управления движением. Для этого используется информация, заложенная в блоке 14 - кинематические и динамические модели робота, а также текущая информация, получаемая с помощью блока 4 (датчики обратной связи, осуществляющие контроль положения двигателей и сервоприводов ног, рук, тела и головы робота). Кроме того, для диалога робота с учащимися и мастером производственного обучения также используется блок 2 - сенсорная система, включающая в свой состав два микрофона для ввода речи учащихся, тактильные датчики для воздействия на осязательные рецепторы, манипуляторы-кисти левой и правой руки робота, блок 3 - система технического зрения, информация с которой обрабатывается блоком 9 с использованием блока 16 (система поддержки принятия решений).
Для реализации алгоритмов интеллектуального управления поведением робота используются: блок 16, блок 12, блок 11, блок 9 - подсистема управления восприятием (используются нейросетевые алгоритмы, реализованные на основе методик, изложенных в работах (Корягин Е.В. Разработка высокоуровневой системы управления антропоморфным роботом / Нейроинформатик, 2013, том 7, №1, С. 1-17; Станкевич Л.А. Нейрологические средства систем управлегния интеллектуальных роботов, С.58-110 / Научная сессия МИФИ-2004. У1 Всероссийская научно-техническая конференция «Нейроинформатика-2004»: Лекции по нейроинформатике. Часть 2. - М.: МИФИ, 2004, - 200 с.).
Виртуальный робот-тьютор в процессе обучения реализует те же функции, что и реальный человекоподобный робот, и содержит ту же интеллектуальную систему управления, которая представлена на фиг. 1. Виртуальный робот-тьютор также содержит блоки 2-7. Однако блоки 4-7 реализованы в виде виртуальных моделей программно с использованием технологии 3D-моделирования. Взаимодействие с учащимися происходит виртуально с использованием средств визуализации виртуальной информации (например, виртуальный ретинальный монитор или учебный кабинет виртуальной реальности, при помощи которых отображаются необходимые действия и движения виртуального робота-тьютора в процессе обучения. При этом 3D-модель робота может быть представлена в виде человекоподобного робота или с целью повышения интереса и мотивации к обучению учащихся - в образе мультипликационного (привлекательного, хорошо узнаваемого) «киногероя».
Робот-тьютор благодаря своей структуре и интеллектуальной системе управления (фиг. 1) может проводить демонстрацию конкретных трудовых операций, во время оздоровительных пауз может демонстрировать физические упражнения в игровой форме (физкультминутки можно проводить в произвольной форме или используя различные методики проведения физкультминуток). Робот проводит физкультминутки в течение 15 минут по мере утомления учащихся. Робот может также проводить совместно с психологом психологическое тестирование (например, по методике САН - http://www.oksanochka.com/003/001/024_3.shtml).
Учащийся с инвалидностью может проходить обучение в домашних условиях и участвовать в уроке онлайн в режиме реального времени с использованием Skype под наблюдением реального мастера производственного обучения. Форма и содержание урока может варьироваться. В него может быть включена виртуальная экскурсия в зависимости от выбранной рабочей специальности, например, на кондитерскую фабрику.
Процесс обучения является непрерывным. В случае невозможности посещения занятий в образовательном учреждении учащийся может проходить обучение онлайн на дому.
Примеры конкретного выполнения
Пример 1. С. Руслан, 19 лет. Диагноз: выраженный парез нижних конечностей с трофическими нарушениями. Обучался пекарному делу (согласно ФГОС СПО 260103.01 на базе основного общего образования) в течение 2 лет и 10 месяцев.
До реабилитации по предлагаемому способу не проявлял особого интереса к обучению, был пассивен на школьных уроках, не принимал участия в жизни коллектива.
Прошел обучение в группе из 4 больных и 4 здоровых сверстников (инклюзивная группа). Руслан участвовал в уроках онлайн в режиме реального времени. Был использован реальный человекоподобный робот-тьютор.
В процессе обучения проводились физкультминутки в течение 15 минут на каждом уроке. Во время физкультминутки мастер производственного обучения контролировал ее проведение. Руслан нажимал кнопки для поднятия-опускания платформы инвалидной коляски и ее вибрации. Также на инвалидной коляске был установлен коврик для массажа, который был применен во время физкульминутки для массажа позвоночника и других органов (тазобедренного сустава).
После обучения по предлагаемому способу стал активнее, начал увлекаться спортом, речь стала более четкой, ясной, появились друзья, стал посещать театр, выставки, т.е. улучшилось качество жизни. Поступил в университет на биологический факультет.
Пример 2. П.Ш. Гузель, 23 года. Диагноз: аутизм. Обучалась на оператора швейного оборудования, швею (согласно ФГОС СПО 2620.19 на базе основного общего образования) 10 месяцев.
До реабилитации по предлагаемому способу была необщительна, речь ее была односложной, для нее были характерны постоянные страхи и стереотипные движения, плохое настроение.
Уроки проводились в игровой форме в виде деловой и ролевой игры в «Ателье». После занятий с участием виртуального робота в инклюзивной группе со здоровыми сверстниками заметно улучшилось психическое состояние, она стала спокойнее, увеличился словарный запас, стала контактнее, заметно уменьшились страхи и стереотипы поведения. Поступила в профессиональный лицей и успешно его закончила, на данный момент трудится в индивидуальной мастерской по швейному делу на дому.
Пример использования робота-тьютора на уроке по обучению швейному делу. Предварительно робот проводит инструктаж по намотке нитки на шпульку. Далее робот обращается к учащимся (часть диалога): «Здравствуйте! Сегодня урок начнем с закрепления пройденного материала. Я вас очень прошу следить за работой монитора и правильно выполнять все мои указания. Итак, установите, пожалуйста, катушку с нитками на предназначенный для нее стержень и проведите нить вокруг регулятора натяжения нити при намотке на шпульку. Все выполнили? … Молодцы! Пропустите конец нити сквозь отверстие в шпульке с внутренней ее стороны. Не спешите, пожалуйста! Установите шпульку на вал устройства намотки и сдвиньте вал вправо… Верно! Отлично! Вручную вращайте шпульку по часовой стрелке до тех пор, пока пружина на валу не попадет в предназначенный для нее паз на шпульке. Здесь будьте предельно внимательны! Удерживая конец нити, плавно нажмите на педаль, чтобы несколько оборотов нити намотались на шпульку. Затем остановите машину. После чего обрежьте излишек нити над шпулькой и, нажимая на педаль, продолжите намотку нити на шпульку». Робот многократно повторяет данную инструкцию.
Робот может сам выполнять некоторые движения вместо учащегося с ОВЗ.
Пример 3. Ш.В. Георгий, 21 год. Диагноз: глухота. Обучался ювелирному делу 3 года 5 месяцев (согласно ФГОС СПО 072500.02 «Ювелир. Огранщик вставок для ювелирных и художественных изделий» на базе основного общего образования).
До реабилитации по данному способу был неуверен в себе, не было любимого занятия, старался держаться в стороне от коллектива, был вспыльчив и раздражителен.
После применения к нему заявляемого способа стал проявлять творческий подход к избранной профессии. Георгий стал победителем и призером предметных олимпиад различного уровня, автором нестандартных проектов, лауреатом творческих конкурсов по ювелирному делу.
Таким образом, робот восполняет умственные и физические недостатки учащихся с ОВЗ, показывает выполнение некоторых трудовых операций по конкретной рабочей профессии или сам их выполняет. Применение человекоподобного робота в обучении рабочим профессиям будет способствовать: повышению качества учебно-воспитательной работы мастеров производственного обучения, преподавателей и других специалистов; формированию технической компетентности у учащихся, логического и инженерного мышления, способствует развитию интереса к робототехнике; развитию коммуникативных компетенций учащихся, а также речевого поведения, общения и т.д., популяризации рабочих профессий, поможет разнообразить педагогический процесс образовательного учреждения (лицея, колледжа).
Таким образом, применение изобретения позволяет учащимся с инвалидностью или с ограниченными возможностями здоровья в условиях инклюзивного профессионального образования освоить рабочую профессию, что ведет к их реабилитации и социализации в обществе. Процесс обучения является непрерывным. В случае невозможности посещения занятий в образовательном учреждении учащийся может проходить обучение онлайн на дому.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОАКТИВНЫЙ ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛЯ, СОДЕРЖАЩИЙ ЭВОЛЮЦИОНИРУЮЩИЙ АГЕНТ | 2004 |
|
RU2331918C2 |
| Способ мониторинга профессиональной надёжности | 2022 |
|
RU2825116C2 |
| ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛЯ С УПРЕЖДАЮЩИМ ДЕЙСТВИЕМ | 2003 |
|
RU2353068C2 |
| СПОСОБЫ И СИСТЕМЫ МАНИПУЛИРОВАНИЯ ОБЪЕКТАМИ С ПОМОЩЬЮ РОБОТА ДЛЯ КОНКРЕТНОГО ПРИМЕНЕНИЯ В ИНСТРУМЕНТАЛЬНОЙ СРЕДЕ С ЭЛЕКТРОННЫМИ БИБЛИОТЕКАМИ МИНИ-МАНИПУЛЯЦИЙ | 2015 |
|
RU2756863C2 |
| СПОСОБ РЕАБИЛИТАЦИИ ДЕТЕЙ С НАРУШЕНИЕМ СЛУХА | 2021 |
|
RU2769620C1 |
| СПОСОБ ОЦЕНКИ ПРИРОДНОЙ ПРЕДРАСПОЛОЖЕННОСТИ К ОПРЕДЕЛЕННЫМ СПЕЦИАЛИЗАЦИЯМ В СПОРТЕ И ПРОФЕССИЯХ НА ОСНОВЕ ИЗМЕРЕНИЯ СВОЙСТВ НЕРВНОЙ СИСТЕМЫ ДВИГАТЕЛЬНЫМИ МЕТОДИКАМИ Е.П.ИЛЬИНА | 2020 |
|
RU2732669C1 |
| Способ оздоровления студенческой молодежи | 2020 |
|
RU2732824C1 |
| Способ проведения упражнений для коррекции речевых нарушений | 2022 |
|
RU2804190C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ПСИХОЭМОЦИОНАЛЬНОГО РАВНОВЕСИЯ | 2007 |
|
RU2336100C1 |
| СПОСОБ ПРОВЕДЕНИЯ ГРУППОВОГО ПСИХОЛОГИЧЕСКОГО ТРЕНИНГА ПО МЕТОДУ "ПРОФИЛАКТИЧЕСКАЯ ПСИХОДРАМА" | 2011 |
|
RU2466752C1 |
Изобретение относится к области педагогики, в частности к педагогике профессионально-технического образования и среднего специального образования (инклюзивное образование), социальной педагогике, и может быть использовано для реабилитации и социализации молодых инвалидов с сохранным интеллектом и людей с ограниченными возможностями здоровья (ОВЗ). Реабилитация и социализации юношей и девушек с инвалидностью или ОВЗ основаны на роботометоде и включают совместное обучение учащихся с инвалидностью или ОВЗ и их здоровых сверстников рабочим профессиям в условиях инклюзивного профессионального обучения лицея или колледжа. Проводят серию уроков по выбранной рабочей профессии мастером производственного обучения. Причем каждый урок включает постановку целей и задач урока, инструктаж по технике безопасности, объяснение новой темы с демонстрацией учащимся конкретных трудовых операций по выбранной рабочей профессии. Осуществляют проведение оздоровительных пауз, психологическое тестирование и диагностику самочувствия, активности и настроения учащихся во время урока, постоянное ведение диалога с учащимися путем одобрения их действий и указания на недостатки, а также подведение итогов урока и объяснение домашнего задания на следующий урок. Причем в процессе обучения используют реального человекоподобного робота-тьютора или виртуального человекоподобного робота-тьютора в виде 3D-модели, который восполняет умственные и физические недостатки учащихся с инвалидностью или ОВЗ. Способ позволяет освоить инвалидам и учащимся с ОВЗ рабочие профессии, восполнить умственные и физические недостатки учащихся за счет привлечения к обучению реального человекоподобного робота-тьютора или виртуального человекоподобного робота-тьютора в виде 3D-модели. 2 з. п. ф-лы, 2 ил., 3 пр.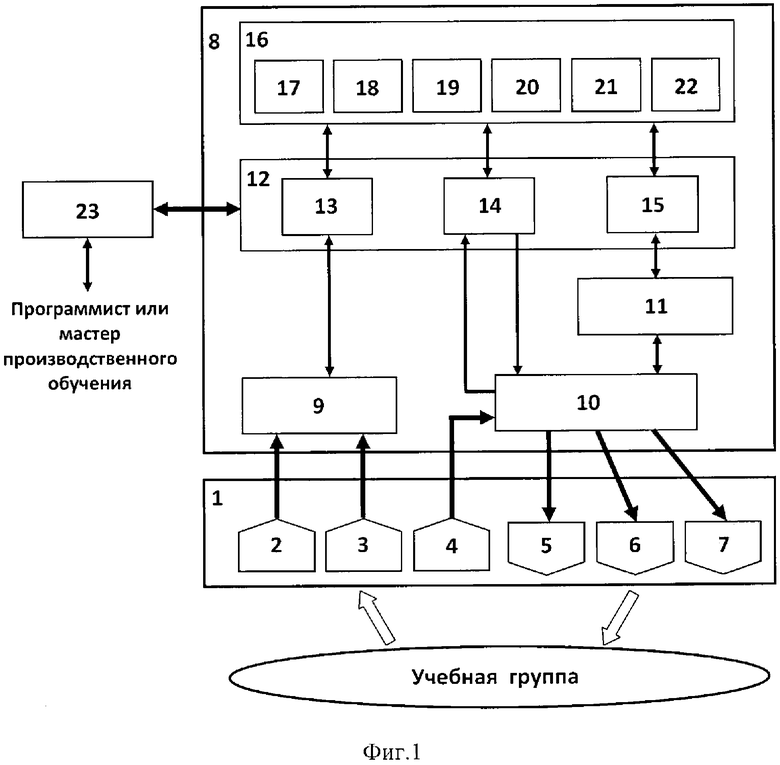
1. Способ реабилитации и социализации юношей и девушек с инвалидностью или ограниченными возможностями здоровья (ОВЗ), основанный на роботометоде и включающий совместное обучение учащихся с инвалидностью или ОВЗ и их здоровых сверстников рабочим профессиям в условиях инклюзивного профессионального обучения лицея или колледжа, при котором проводят серию уроков по выбранной рабочей профессии мастером производственного обучения, причем каждый урок включает постановку целей и задач урока, инструктаж по технике безопасности, объяснение новой темы с демонстрацией учащимся конкретных трудовых операций по выбранной рабочей профессии, проведение оздоровительных пауз, психологическое тестирование и диагностику самочувствия, активности и настроения учащихся во время урока, постоянное ведение диалога с учащимися путем одобрения их действий и указания на недостатки, а также подведение итогов урока и объяснение домашнего задания на следующий урок, причем в процессе обучения используют реального человекоподобного робота-тьютора или виртуального человекоподобного робота-тьютора в виде 3D-модели, который восполняет умственные и физические недостатки учащихся с инвалидностью или ОВЗ, при этом перед началом урока программист или мастер производственного обучения с использованием интеллектуального человеко-машинного интерфейса в память блока робота, отвечающего за модель поведения для организации взаимодействия робота с учащимися в процессе целенаправленных действий при их обучении, вводит текущую модель поведения для организации взаимодействия робота с учащимися и мастером производственного обучения при проведении текущего учебного занятия, а диалог с учащимися во время урока осуществляют посредством блока робота «диалоговая система», включающего в свой состав динамик, подсистему синтеза речи, и подсистемы артикуляции речи робота - блока «двигательная система», который также используют при демонстрации соответствующих движений ног, рук, тела, головы робота во время урока или физкультурной паузы, причем демонстрацию высокоточных трудовых операций проводят посредством робота-тьютора, используя блок робота «манипуляторы-кисти левой и правой руки робота», а управление блоками «двигательная система», «манипуляторы-кисти левой и правой руки робота», «диалоговая система» осуществляют на основе заложенной в блок «интеллектуальная система управления (ИСУ) робота, реализованная программно в микроконтроллере робота» программы управления поведением робота на основе текущей информации блока «модель поведения для организации взаимодействия робота с учащимися в процессе целенаправленных действий при их обучении», используя информацию, заложенную в блоке «кинематические и динамические модели робота», а также текущую информацию, получаемую с помощью блока «датчики обратной связи для контроля положения двигателей и сервоприводов ног, рук, тела и головы робота», кроме того, для диалога робота с учащимися и мастером производственного обучения также используют блок «сенсорная система», причем для реализации алгоритмов интеллектуального управления поведением робота используют блок «база знаний», реализованные на основе нейросетевых алгоритмов блок «подсистема управления восприятием», блок «подсистема управления поведением робота» и блок «система поддержки принятия решений (СГШР)» для обеспечения стратегии взаимодействия робота и учащихся с использованием следующих шести когнитивных агентов: агент «Слышу-Говорю», реализующий акустичекое восприятие и голосовое общение с учащимися и мастером производственного обучения, агент «Вижу-Слышу-Говорю», реализующий зрительное и акустичекое восприятие и общение робота, агент «Вижу-Перемещаюсь», реализующий зрительное восприятие и целенаправленное перемещение робота среди учащихся в учебном классе, агент «Вижу-Манипулирую», реализующий зрительное восприятие и целенаправленные манипуляции объектами среды, агент «Безопасно-Контактирую», реализующий контроль безопасности и коррекции действий в опасных ситуациях при взаимодействии с людьми, агент «Слышу-Вижу-Учусь», реализующий зрительно-акустическое восприятие и обучение поведению в разных режимах.
2. Способ по п. 1, отличающийся тем, что робот-тьютор во время оздоровительных пауз демонстрирует физические упражнения в игровой форме, а также проводит совместно с психологом психологическое тестирование.
3. Способ по п. 1, отличающийся тем, что учащийся с инвалидностью или ОВЗ проходит обучение в домашних условиях и участвует в уроке онлайн в режиме реального времени с использованием Skype под наблюдением реального мастера производственного обучения.
| ШАФИКОВА З | |||
| Х | |||
| Технологии инклюзивного обучения детей с ограниченными возможностями здоровья | |||
| Педагогика и психология, 2012, с | |||
| 1426-1428 | |||
| СПОСОБ КОНДУКТИВНО-ПЕДАГОГИЧЕСКОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ (ВАРИАНТЫ) | 2004 |
|
RU2272606C1 |
| KR 0100824313 B1, 22.04.2008 | |||
| CN 103531074 A, 22.01.2014 | |||
| BELEN C | |||
| et al | |||
| Robotics in Education | |||
| J Intell Robots Syst, 2015, р | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| FEIL-SEIFER D | |||
| et al | |||
| Human-Robot Interaction | |||
| Invited contribution to Encyclopedia of Complexity and Systems Science, Robert A | |||
| Meyers (eds.), Springer New York, 4643-4659, 2009, р | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ENCARNACAO P | |||
| et al | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Токарный резец | 1924 |
|
SU2016A1 |

