ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится в общем к насосным системам прямого вытеснения. В частности, настоящее изобретение относится к приводным системам для возвратно-поступательных насосов и способам управления возвратно-поступательным движением.
Насосы прямого вытеснения предусматривают системы, в которых постоянный объем материала втягивается в расширяющуюся камеру и вытесняется из этой камеры при уменьшении ее объема. Такие насосы, как правило, содержат перекачивающее устройство возвратно-поступательного действия, такое как поршень, или перекачивающее устройство вращательного действия, такое как зубчатая передача. Поэтому для возвратно-поступательных поршневых насосов требуется устройство подвода мощности двунаправленного действия, под влиянием которого поршень может приводиться в действие для увеличения и уменьшения объема насосной камеры. Типичные насосные системы приводятся в действие от устройства подвода мощности вращательного действия, такого как двигатель с вращающимся выходным валом. Двигатели обычно выполнены как пневматические двигатели, приводимые в действие сжатым воздухом, и электродвигатели, приводимые в действие переменным током. Таким образом, для устройств подвода мощности вращательного действия требуется преобразование однонаправленного вращения выходного вала в возвратно-поступательное движение. Это обычно достигается за счет систем с коленчатым валом или кулачками, таких как описанные в патенте США №5145339 на имя Lehrke et al., переуступленном Graco Inc. Пневматические двигатели являются неэффективными в отношении энергопотребления в связи с необходимостью приведения в действие компрессора от двигателя, преобразования сжатого воздуха во вращательное движение и преобразования вращательного движения в возвратно-поступательное движение. Кроме того, пневматические двигатели и компрессоры, от которых они приводятся в действие, создают нежелательные уровни шума и в них могут возникать проблемы, связанные с обледенением из-за сжатия и расширения воздуха. Электродвигатели обеспечивают энергосбережение по сравнению с пневматическими двигателями, но все же требуют применения сложных механических устройств, предназначенных для преобразования однонаправленного вращения в двунаправленное возвратно-поступательное линейное движение насоса. В связи с указанным выше существует потребность в усовершенствованных приводных системах для возвратно-поступательных насосов прямого вытеснения.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Насосная система содержит электродвигатель, насос, преобразователь и контроллер. Электродвигатель содержит вращающийся выходной вал, который выполнен с возможностью вращения в первом направлении вращения и противоположном ему втором направлении вращения. Насос содержит линейно перемещаемый входной вал, выполненный с возможностью перемещения в первом линейном направлении и противоположном ему втором линейном направлении. Преобразователь соединяет выходной вал с входным валом так, что вращение выходного вала в первом направлении вращения вызывает поступательное перемещение входного вала в первом линейном направлении, и вращение выходного вала во втором направлении вращения вызывает поступательное перемещение входного вала во втором линейном направлении. Контроллер многократно реверсирует вращение выходного вала, что вызывает возвратно-поступательное движение входного вала.
Способ управления насосом заключается в многократном реверсе направления электрического тока в электродвигатель, вызывая попеременное вращение выходного вала двигателя в направлении по часовой стрелке и направлении против часовой стрелки, и преобразовании попеременного вращения выходного вала в возвратно-поступательное линейное движение вала насоса.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
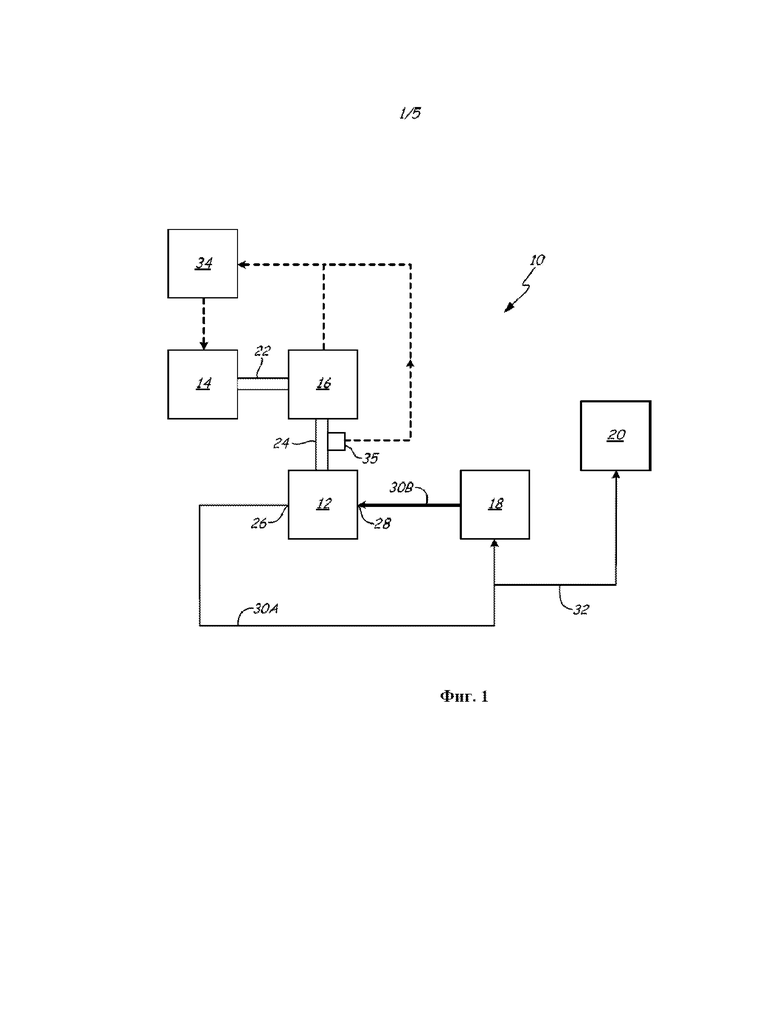
Фиг. 1 – схема насосной системы, содержащей насос прямого вытеснения, приводимый в действие от реверсивного электродвигателя через преобразователь движения.
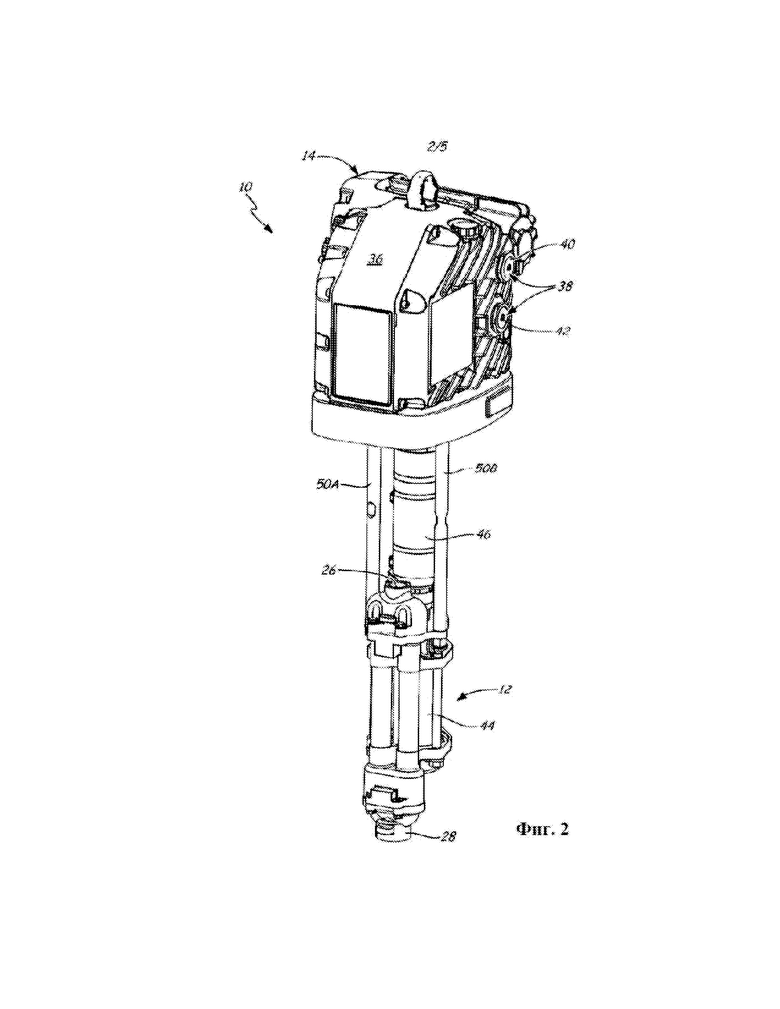
Фиг. 2 – вид в перспективе насосной системы, выполненной согласно фиг 1, в которой насос с линейно перемещающимся поршнем приводится в действие от бесщеточного электродвигателя постоянного тока.
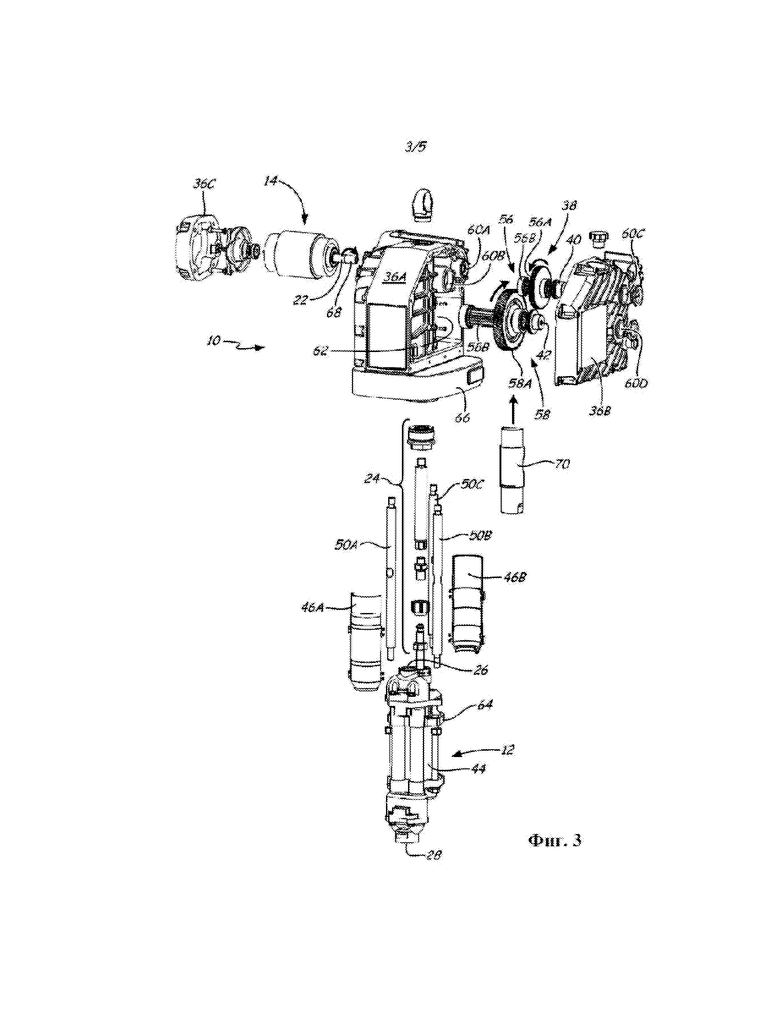
Фиг. 3 – изображение в разобранном виде насосной системы по фиг. 2, демонстрирующее зубчатый редуктор, предназначенный для соединения выходного вала бесщеточного электродвигателя постоянного тока с входным валом насоса с линейно перемещающимся поршнем.
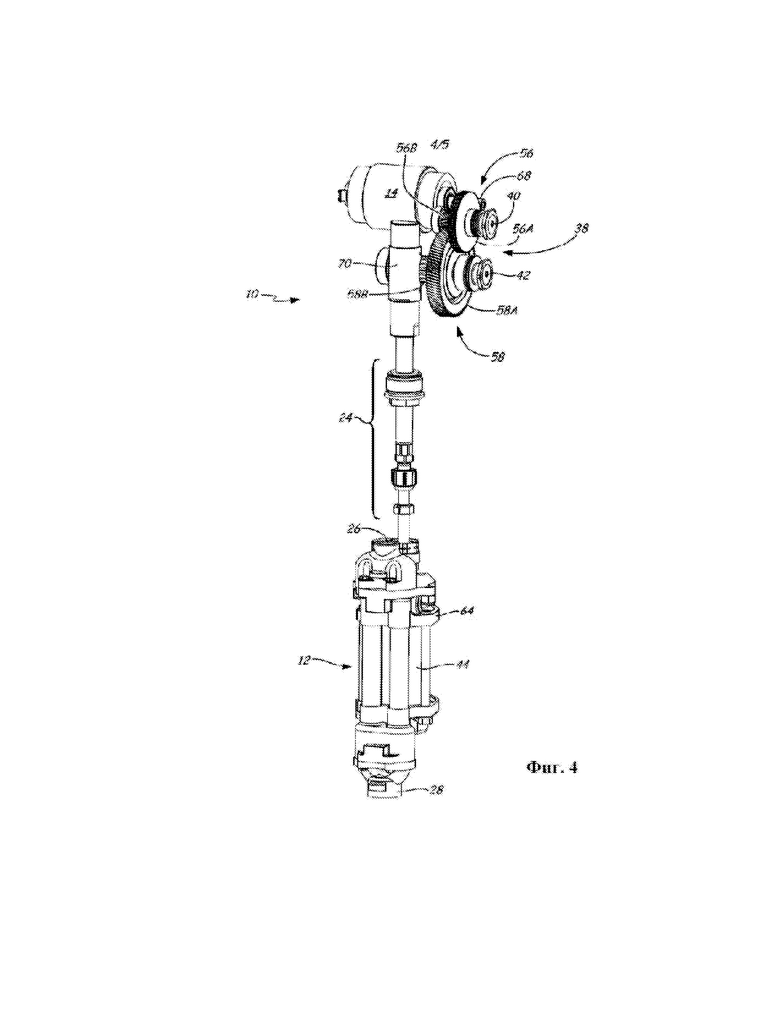
Фиг. 4 – вид в перспективе насосной системы по фиг. 3, демонстрирующий шестерню выходного вала и зубчатую рейку входного вала, взаимосвязанные посредством зубчатого редуктора.
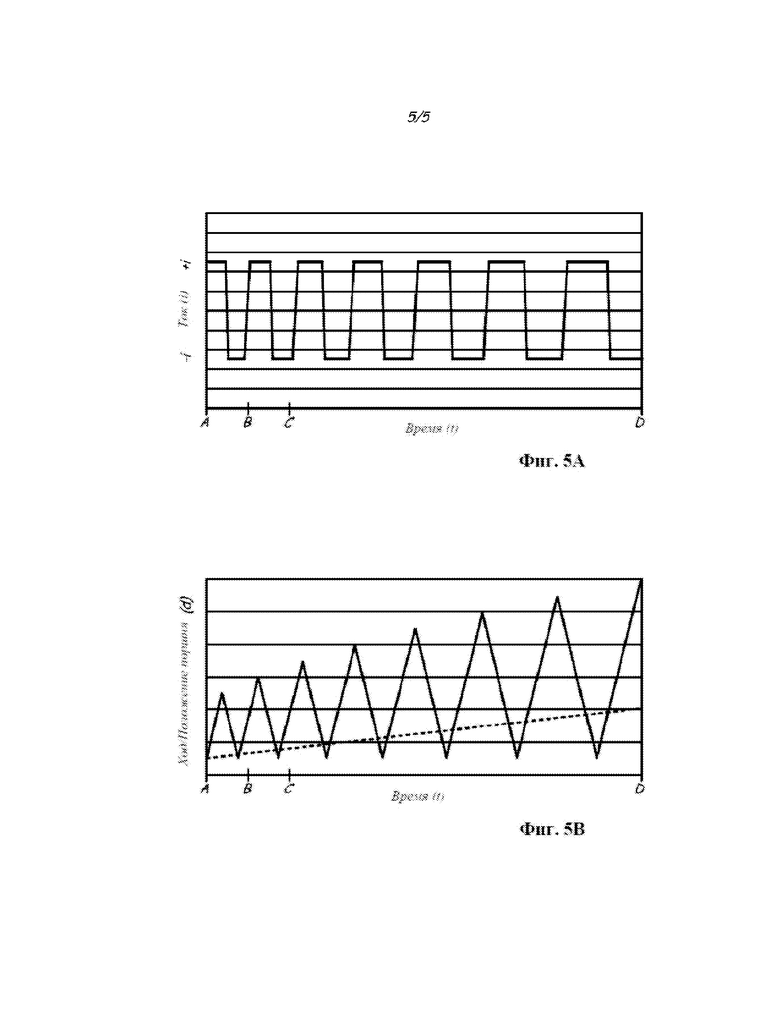
Фиг. 5A – график, показывающий изменение во времени полярности тока на входе бесщеточного электродвигателя постоянного тока по фиг. 2–4.
Фиг. 5B – график, показывающий изменение во времени хода вала насоса с линейно перемещающимся поршнем по фиг. 2–4.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 представлена схема насосной системы 10, содержащей насос 12 прямого вытеснения, приводимый в действие от электродвигателя 14 и преобразователя 16 движения. Насос 12 всасывает текучую среду, такую как краска, из емкости 18 и подает текучую среду под давлением в распылитель 20. Текучая среда, неизрасходованная распылителем 20, возвращается в емкость 18. Приводной вал 22 двигателя 14 и вал 24 насоса 12 механически соединены с преобразователем 16. При вращении приводного вала 22 преобразователь 16 вызывает перемещение вала 24 насоса. Выпускное отверстие 26 и впускное отверстие 28 насоса 12 соединены с емкостью 18 через трубопроводы 30A и 30B для текучей среды соответственно. Распылитель 20 подсоединен к трубопроводу 30A для текучей среды посредством шланга 32. Электронное управление двигателя 14 обеспечивает контроллер 34, который содержит датчик 35 положения.
Для обеспечения приложения движущей силы к приводному валу 22 электродвигатель 14 снабжен источником питания от контроллера 34. В рассматриваемом варианте осуществления изобретения двигатель 14 выполнен в виде роторного двигателя, в котором вал 22 вращается вокруг центральной оси. Контроллер 34 электрически соединен с двигателем 14 для управления электрическим током, подаваемым в двигатель 14 для обеспечения тем самым управления вращением вала 22. В рассматриваемом со ссылкой на фиг. 2–4 варианте осуществления двигатель 14 выполнен в виде бесщеточного электродвигателя постоянного тока (DC). Однако двигатель 14 может быть выполнен и в виде двигателя постоянного тока щетками или электродвигателя переменного тока (АС) с постоянными магнитами.
Вращение вала 22 запускает механизм преобразования в преобразователе 16. Преобразователь 16 преобразует вращательное движение вала 22 в линейное движение вала 24. В частности, преобразователь 16 преобразует однонаправленное вращение вала 22 в перемещение вала 24 в одном направлении. В варианте осуществления изобретения, описываемом со ссылкой на фиг. 2–4, преобразователь 16 содержит реечную передачу, в которой вал 22 вращает шестерню, находящуюся в зацеплении с линейной зубчатой рейкой, соединенной с валом 24 насоса. Преобразователь 16, как правило, содержит также зубчатый редуктор, который, например, понижает скорость вращения вала 24 насоса относительно приводного вала 22. Однако преобразователь 16 может содержать преобразовательные механизмы других типов, такие как кулачковый механизм или кривошипно-шатунный механизм.
Преобразователь 16 соединен с валом 24 насоса 12. Насос 12 выполнен в виде насоса прямого вытеснения, в котором возвратно-поступательное движение вала 24 вызывает увеличение и уменьшение объема нагнетательной камеры. В варианте осуществления изобретения, описанном со ссылкой на фиг. 2–4, насос 12 выполнен в виде поршневого насоса с линейно перемещающимся поршнем, в котором поршень расположен в цилиндре для обеспечения всасывания текучей среды во впускное отверстие 28 и выталкивания сжатой текучей среды из выпускного отверстия 26. Однако насос 12 может быть выбран из числа насосов прямого вытеснения других типов, например, он может быть выполнен в виде диафрагменного насоса.
Из выпускного отверстия 26 насоса выходит текучая среда под давлением. Текучая среда под давлением проталкивается по трубопроводу 30A для текучей среды в емкость 18. За счет нагнетательного механизма действия насоса 12 этот насос 12 всасывает из емкости 18 через трубопровод 30 В для текучей среды и впускное отверстие 28 текучую среду, не находящуюся под давлением. Распылитель 20 соединен параллельно с емкостью 18 для всасывания текучей среды под давлением из трубопровода 30А для текучей среды. Перекачивание текучей среды из емкости 18 обеспечивается избирательным управлением работой распылителя 20. Управление работой распылителя 20 может осуществляться непосредственно вручную, или управление им может осуществляться от контроллера в ходе автоматизированного процесса распыления.
Настоящее изобретение предусматривает применение в системе 10 реверсивного электродвигателя, такого как бесщеточный электродвигатель 14 постоянного тока, от которого приводится в действие линейный исполнительный механизм, такой как преобразователь 16, приводящий в движение возвратно-поступательный насос, такой как поршневой насос 12. В тех вариантах осуществления изобретения, где применен бесщеточный электродвигатель постоянного тока, контроллер 34 действует так, что в двигатель 14 подается знакопеременный ток, вызывая возвратно-поступательное движение. В частности, контроллер 34 реверсирует направление прохождения электрического тока через двигатель 14 с тем, чтобы вызвать изменение направления вращения вала 22. Бесщеточные электродвигатели постоянного тока обладают малой инерцией и могут менять направление вращения на обратное, быстро реагируя на изменение направления электрического тока. Кроме того, бесщеточные электродвигатели постоянного тока обеспечивают полный диапазон изменения крутящего момента при нулевой скорости вращения, тем самым обеспечивая возможность поддержания насосом 12 полного давления, что имитирует реагирование пневматического двигателя без возникновения проблем, связанных с шумом, расходами и обледенением. К тому же, в бесщеточных электродвигателях постоянного тока существует прямая взаимосвязь между подаваемым электрическим током и крутящим моментом на валу. Таким образом, при поддержании постоянного давления на выходе насоса 12 за счет постоянного крутящего момента (и тока) на выходе двигателя 14 будет иметь место только изменение скорости вращения двигателя 14. Кроме того, в соответствии с другой особенностью настоящего изобретения в контроллере 34 используется датчик 35 положения для осуществления текущего контроля положения вала 24 насоса, благодаря чему обеспечивается возможность рандомизирования или изменения реверса насоса 12 для уменьшения износа внутренних компонентов системы 10.
На фиг. 2 представлен вид в перспективе насосной системы 10 согласно исполнению по фиг. 1, в которой насос 12 с линейно перемещающимся поршнем приводится в действие от бесщеточного электродвигателя 14 постоянного тока. Насос 12 и двигатель 14 заключены внутри кожуха 36, который также вмещает преобразователь 16 движения (не показан). Преобразователь 16 содержит зубчатый редуктор 38, который установлен внутри кожуха 36. Зубчатый редуктор 38, который содержит валы 40 и 42, соединяет шестерню двигателя 14 с зубчатой рейкой насоса 12. Насос 12 содержит впускное отверстие 28, выпускное отверстие 26, поршневой цилиндр 44 и экран 46 вала, который закрывает входной вал (фиг. 3) для насоса 12. Насос 12 смонтирован на кожухе 36 с помощью стяжных стержней 50A, 50B и 50C (фиг. 3). Стяжные стержни 50A–50C удерживают насос 12 в неподвижном положении относительно кожуха 36 так, что вал 24 насоса внутри экрана 46 может приводиться в движение от двигателя 14 через преобразователь 16 и зубчатую передачу 38.
На фиг. 3 приведено покомпонентное изображение насосной системы 10 по фиг. 2, показывающее зубчатый редуктор 38, предназначенный для соединения приводного вала 22 бесщеточного двигателя 14 постоянного тока с валом 24 насоса 12 с линейно перемещающимся поршнем. Преобразователь 16 (фиг. 1) вмещает зубчатый редуктор 38, который содержит первую группу 56 зубчатых колес и вторую группу 58 зубчатых колес. Кожух 36 содержит основной кожух 36A, крышку 36B зубчатого редуктора и крышку 36C двигателя.
Двигатель 14 вставлен в полость внутри основного кожуха 36A так, что приводной вал 22 проходит через отверстие 60A, образуя выходной вал для приведения в движение зубчатого редуктора 38. Крышка 36C двигателя установлена вплотную к основному кожуху 36A, обеспечивая охват двигателя 14. Вал 40 первой группы 56 зубчатых колес закреплен между отверстием 60B в основном кожухе 36A и отверстием 60C в крышке 36 В зубчатого редуктора. Вал 42 второй группы 58 зубчатых колес закреплен в отверстии 60D в крышке 36B зубчатого редуктора и проходит в полость 62 основного кожуха 36A. Вал 24 насоса образует входной вал для управления работой насоса 12. Первый конец вала 24 насоса 12 проходит в полость 62 основного кожуха 36A и соединен со второй группой 58 зубчатых колес посредством зубчатой рейки (см. зубчатую рейку 70 на фиг. 4). Второй конец вала 24 насоса проходит через экран 46 в поршневой цилиндр 44 для приведения в движение поршня (не показан). Стяжные стержни 50A–50C соединяют платформу 64 насоса 12 с основанием 66 основного кожуха 36A. Вокруг вала 24 насоса между стяжными стержнями 50A–50C установлены экранирующие элементы 46A и 46B. Впускное отверстие 28 насоса 12 подсоединено с источником текучей среды не под давлением, таким как трубопровод 30B для текучей среды (фиг. 1). Выпускное отверстие 26 насоса 12 подсоединено к дозатору текучей среды, такому как распылитель 20 (фиг. 1).
В одном варианте осуществления изобретения двигатель 14 установлен внутри кожуха 32 так, что приводной вал 22 перпендикулярен к валу 24 насоса. Например, система 10 предназначена для работы сверху плоской поверхности, такой как пол. Вал 24 насоса сконфигурирован так, что он в общем перпендикулярен к плоской поверхности. Двигатель 14 при этом, как правило, установлен перпендикулярно к валу 24 и параллельно плоской поверхности. По существу вращение вала 22 легко преобразуется в линейное поступательное перемещение вала 24 вверх и вниз, например, при помощи реечной передачи. Двигатель 14 вращает приводной вал 22, который передает вращение к первой группе 56 зубчатых колес. Первая группа 56 зубчатых колес вызывает вращение второй группы 58 зубчатых колес, которая вызывает перемещение вала 24 насоса 12 через зубчатую рейку (не показана). Под действием вала 24 насоса приводится в движение поршень внутри цилиндра 44, что вызывает всасывание текучей среды не под давлением во впускное отверстие 28 и выталкивание текучей среды под давлением из выпускного отверстия 26. В одном варианте осуществления изобретения насос 12 выполнен в виде насоса с четырьмя шариковыми поршнями, который предоставлен в продажу фирмой Graco Inc. Пример насоса с четырьмя шариковыми поршнями в общем описан в патенте США №5368424 на имя Powers, переуступленном фирме Graco Inc. Экранирующие элементы 46A и 46B, кроме прочего, защищают от попадания грязи, пыли и частиц изнашивания в цилиндр 44 насоса через отверстие для доступа к валу 24 насоса. Стяжные стержни 50A–50C жестко удерживают насос 12 на расстоянии от кожуха 36, так что преобразователь 16, содержащий зубчатый редуктор 38, может вызывать возвратно-поступательное перемещение вала 24 насоса относительно цилиндра 44. Стяжные стержни 50A–50C при этом оказывают сопротивление силам, создаваемым двигателем 14 и прикладываемым к насосу 12.
В собранном состоянии зубчатый редуктор 38 образует собой соединение передачи мощности между шестерней 68 приводного вала 22 и зубчатой рейкой 70 (фиг. 4) вала 24 насоса. В частности, шестерня 68 соединена с входным зубчатым колесом 56A группы 56 зубчатых колес. Выходное зубчатое колесо 56B соединено с входным зубчатым колесом 58A группы 58 зубчатых колес, которое сообщает движение выходному зубчатому колесу 58B. Выходное зубчатое колесо 58B подводит мощность вращательного движения к зубчатой рейке 70. По этой причине вращение вала 22 двигателем 14 вызывает линейное перемещение вала 24. Преобразователь 16, содержащий зубчатый редуктор 38, обеспечивает только однонаправленную передачу силы от вала 22 к валу 24, в результате чего одно направление перемещения вала 24 коррелирует с одним направлением вращения вала 22. При помощи контроллера 34 осуществляется реверс направления вращения вала 22 от двигателя 14 (фиг. 1), вызывая многократное возвратно-поступательное перемещение вала 24, обеспечивающее нагнетательное действие поршня, находящегося внутри цилиндра 44.
На фиг. 4 представлен вид в перспективе насосной системы 10 по фиг. 3, показывающий шестерню 68 приводного вала 22 (фиг. 3) и зубчатую рейку 70 вала 24 насоса, взаимосвязанные посредством зубчатого редуктора 38. Кожух 36 на фиг. 4 не показан, так что можно видеть, как собраны компоненты насосной системы 10. Вращение приводного вала 22 двигателем 14 вызывает поступательное перемещение вала 24 насоса 12. С помощью контроллера 34 (фиг. 1) в двигатель 14 подается знакопеременный постоянный электрический ток, что вызывает попеременное вращение в двух направлениях или двунаправленное вращение приводного вала 22.
В течение первого периода времени обеспечивается поступление в двигатель 14 постоянного электрического тока первого направления, вызывающее вращение вала 22 в направлении по часовой стрелке, которое, в конечном счете, будет приводить к перемещению вала 24 насоса 12 в направлении вверх относительно фиг. 4. Вращение шестерни 68 в направлении по часовой стрелке вызывает вращение входного зубчатого колеса 56A в направлении против часовой стрелки. Входное зубчатое колесо 56A вращается медленнее вследствие того, что диаметр зубчатого колеса 56А больше диаметра шестерни 68. Входное зубчатое колесо 56A и выходное зубчатое колесо 56B установлены на валу 40 так, что выходное зубчатое колесо 56 В вращается в направлении против часовой стрелки с такой же скоростью, как и входное зубчатое колесо 56A. Выходное зубчатое колесо 56B находится в зацеплении с входным зубчатым колесом 58A второй группы 58 зубчатых колес, так что вращение против часовой стрелки выходного зубчатого колеса 56B вызывает вращение по часовой стрелке входного зубчатого колеса 58A. Диаметр входного зубчатого колеса 58A больше диаметра выходного зубчатого колеса 56B, в результате чего входное зубчатое колесо 58A вращается медленнее, чем выходное зубчатое колесо 56B. Входное зубчатое колесо 58A и выходное зубчатое колесо 58B установлены на валу 42 так, что выходное зубчатое колесо 58B вращается в направлении по часовой стрелке с такой же скоростью, как и входное колесо 58A. По этой причине скорость вращения по часовой стрелке выходного зубчатого колеса 58B является пониженной по сравнению со скоростью вращения по часовой стрелке шестерни 68. То, насколько понижена скорость вращения, зависит от конкретных параметров двигателя 14 и насоса 12 и требуемой производительности системы 10. Выходное зубчатое колесо 58B вращается в направлении по часовой стрелке, вызывая продвижение зубчатой рейки 70 вверх по отношению к ориентации фиг. 4.
Перемещение в направлении вверх зубчатой рейки 70 также вынуждает двигаться вверх вал 24 насоса. Расстояние, на которое перемещается в направлении вверх вал 24 насоса, находится в прямой взаимосвязи с периодом времени, в течение которого контроллер 34 вынуждает двигатель 14 вращать вал 22 в первом направлении. Таким образом, величина хода вала 24 насоса или поршня внутри цилиндра 44 непосредственно соответствует периоду времени поступления электрического тока в двигатель 14 в определенном направлении. Вал 24 движется в направлении наружу в сторону удаления от насоса 12, вызывая всасывание текучей среды в цилиндр 44 в месте нахождения впускного отверстия 28.
Для того чтобы повторно вставить вал 24 в цилиндр 44 и вытеснить текучую среду под давлением наружу из цилиндра 44 через выпускное отверстие 26, под действием контроллера 34 двигатель 14 вызывает реверсирование направления вращения вала 22 до установления второго направления, противоположного первому направлению. В одном варианте осуществления изобретения контроллер 34 реверсирует направление прохождения электрического тока через двигатель 14. Это может быть осуществлено путем реверсирования полярности электрического тока в обмотке якоря двигателя 14, что является известным в данной области техники. Таким образом, зубчатая рейка 70 проходит вниз (относительно положения фиг. 4) за счет взаимодействия первой группы 56 зубчатых колес и второй группы 58 зубчатых колес, что вызывает вталкивание вала 24 насоса в цилиндр 44. Таким образом обеспечивается линейное возвратно-поступательное движение вала 24 насоса за счет попеременного непрерывного прохождения электрического тока в противоположных направлениях через двигатель 14 в течение периодов времени, задаваемых контроллером 34 (фиг. 1).
Параметры управления для двигателя 14 задаются оператором системы 10, исходя из требуемой производительности насоса 12. Соответственно, контроллер 34 содержит компьютерную систему, содержащую процессор, память, графический дисплей, пользовательские интерфейсы, память и т.п., которые известны в данной области техники. Величина электрического тока, подаваемого к двигателю 14, чередование полярности (направления) тока и продолжительность периода времени подачи в двигатель 14 электрического тока каждой из полярностей задаются контроллером 34 (фиг. 1). Контроллер 34 работает таким образом, что поддерживает постоянную величину электрического тока, подаваемого в двигатель 14 при каждой из полярностей. Протекание в двигателе 14 тока постоянной величины обеспечивает получение на его выходе постоянного крутящего момента. Крутящий момент с приводного вала 22 передается непосредственно к валу 24 насоса в линейной зависимости посредством шестерни 68, зубчатого редуктора 38 и зубчатой рейки 70. Таким образом, частота вращения приводного вала 22 определяется силой противодействия приводного вала 22 от давления внутри насоса 12 через зубчатый редуктор 38. Как указано выше, бесщеточные электродвигатели постоянного тока быстро реагируют на изменения электрического тока на входе, что позволяет двигателю 14 быстро менять направление вращения на обратное, физически останавливая вращение (когда скорость равна нулю) на короткий момент в промежутке при сохранении крутящего момента на выходе в течение всего периода времени. Таким образом, управление бесщеточными электродвигателями постоянного тока с помощью контроллера 34 может осуществляться для обеспечения возвратно-поступательного движения вала 24 насоса без необходимости в детальной разработке механических устройств для преобразования вращения выходного вала в двунаправленное возвратно-поступательное перемещение вала насоса. К тому же бесщеточные электродвигатели постоянного тока работают с более низким уровнем шума и имеют меньшее энергопотребление, чем известные пневматические двигатели. В связи с вышеуказанным насосная система 10 обеспечивает снижение уровня шума на выходе и уменьшение эксплуатационных расходов по сравнению с другими системами.
Фиг. 5A представляет собой график зависимости от времени (t) входного электрического тока (i), подаваемого в бесщеточный электродвигатель 14 постоянного тока по фиг. 2–4. Фиг. 5B представляет собой график, показывающий зависимость от времени (t) длины хода (d) вала 24 поршневого насоса 12 с линейным перемещением поршня по фиг. 2–4. Как видно из фиг. 5А, величина электрического тока i является приблизительно одинаковой во все моменты времени. Таким образом, выходной крутящий момент вала 22 является приблизительно постоянным. Например, в момент времени A контроллер 34 действует таким образом, что обеспечивает прохождение через двигатель 14 электрического тока в положительном направлении, которое в зависимости от зубчатой передачи вызывает движение вала 24 насоса в направлении вверх. Далее контроллер 34 действует таким образом, что мгновенно вызывает прохождение через двигатель 14 в отрицательном направлении электрического тока такой же величины, как и величина тока положительной полярности. Такое реверсирование вызывает движение вала 24 насоса в направлении вниз. Таким образом, в промежутке между моментом времени A и моментом времени В имеет место один полный цикл реверсирования насоса. Направление прохождения электрического тока i постоянно меняется от положительного до отрицательного в течение таких периодов времени, при которых непрерывное возвратно-поступательное движение вала 24 насоса происходит до тех пор, пока это требуется.
Полный цикл реверсирования насоса, включающий ход вверх и ход вниз вала 24 насоса, включает две полярности электрического тока – положительную и отрицательную. Промежуток времени, соответствующий каждому из циклов реверсирования насоса, может изменяться для обеспечения улучшения эксплуатационных показателей системы 10, как описано ниже. В изображенном варианте осуществления изобретения электрический ток как положительной полярности, так и отрицательной полярности нарастает в течение показанного периода времени. Таким образом, второе реверсирование насоса имеет место в промежутке между моментом времени B и моментом времени C и является более длительным, чем первое реверсирование насоса в промежутке между моментом времени A и моментом времени B. Каждое последующее реверсирование насоса занимает больше времени, чем предыдущее реверсирование насоса. Это соответствует прохождению валом 24 насоса линейного участка большей протяженности, увеличению длины хода поршня в цилиндре 44, как показано на фиг. 5B. Эти изменения длины хода вызывают реверсирование направления движения вала 24 насоса в различных положениях взаимного зацепления зубчатых колес в зубчатом редукторе 38, шестерни 68 и зубчатой рейки 70, в результате чего достигается улучшение распределения износа в зубчатой передаче.
Как видно из фиг. 5B, для показанной сплошной линии положение d поршня внутри цилиндра 44 увеличивается по величине от момента времени A до момента времени D. Например, в промежутке между моментом времени A и моментом времени B длина хода d увеличивается до определенного положения и затем возвращается назад к исходному местоположению. Каждое последующее реверсирование насоса вызывает увеличение длины хода d по сравнением с предыдущим реверсированием. Таким образом, промежуток времени от момента времени А до момента времени В по фиг. 5A соответствует такому же временному интервалу на фиг. 5B, показывающему увеличение длины хода поршня. После увеличения длины хода поршня настолько, что он в момент времени D занимает весь цилиндр 44 или его большую часть, длина хода может постепенно уменьшаться. Таким образом, промежуток времени от момента времени A до момента времени B по фиг. 5A и 5B может быть зеркально отображен вдоль вертикальной оси в момент времени D, что обеспечивает постепенное сокращение интервалов прохождения тока и длины хода.
В число преимуществ, которые дает изменение длины хода, входит увеличение ресурса по износу насосной системы 10. В частности, увеличивается ресурс по износу зубчатых элементов преобразователя 16. Реверсы насоса вызывают возникновение ударных нагрузок в зубьях зубчатых элементов, в частности в шестерне 68. Это особенно проявляется тогда, когда время реверсирования насоса сведено к минимуму и приводной вал 22 быстро меняет направление на обратное. Изменение длины хода вала 24 насоса обеспечивает смену зубьев зубчатых элементов, находящихся в зацеплении при возникновении реверса, благодаря чему обеспечивается распределение ударных нагрузок среди большего количества зубьев зубчатых элементов. Кроме того, будет иметь место изменение местоположений вдоль зон контакта с подшипниками в насосной системе 10, таких как вдоль вала 24, вала 40 или вала 42, в которых имеет место реверсирование насоса, что ведет к увеличению ресурса по износу подшипников в системе 10.
На фиг. 5А и 5 В графические зависимости, представленные сплошными линиями, показывают равномерное изменение по линейному закону длины хода по заранее заданному шаблону. Из фиг. 5А видно, что полное реверсирование насоса произошло в промежутке между моментом времени А и моментом времени В. Каждый период времени реверсирования поровну разделен для положительного электрического тока и отрицательного электрического тока. Такое равномерное распределение гарантирует, что вал 24 насоса не вызовет обрыв конца поршня внутри цилиндра 44 или соударение его с концом цилиндра при отсутствии достаточного свободного пространства для осуществления запрограммированного хода насоса. Впрочем, длину хода можно изменять произвольным образом или ее можно изменять по неравномерному шаблону. При каждом реверсировании насоса распределение времени для положительной и отрицательной полярностей может изменяться при условии, что контроллер 34 осуществляет текущий контроль абсолютного местоположения поршня или снабжен программным шаблоном, который позволяет избежать обрыв поршня в цилиндре. Для этого контроллер 34 использует датчик 35 положения, осуществляющий текущий контроль абсолютного местоположения вала 24 насоса по отношению к цилиндру 44. Альтернативно, цилиндр 44 может быть снабжен датчиком положения, осуществляющим текущий контроль местоположения поршня.
Сплошной линией на фиг. 5 В показано, в качестве примера, изменение от хода вверх до хода вниз при изменении местоположений (отмечено по вершинам пиков), но изменение от хода вниз до хода вверх всегда имеет место в одном и том же исходном местоположении (отмечается по впадинам на нейтральной оси). При этом пунктиром показано, что изменение от хода вниз до входа вверх может иметь место в различных местоположениях. Таким образом, во все моменты времени длина хода поддерживается в пределах всего имеющегося свободного пространства цилиндра 44, но местоположение, где происходит каждая смена хода, может изменяться. Таким образом, может быть осуществлено не только изменение длины хода, но и изменение местоположения, в котором имеет место смена хода, что касается местоположения вала 24 относительно цилиндра 44 (и взаимного зацепления зубьев зубчатой передачи в преобразователе 16).
Для специалистов в области техники, к которой относится изобретение, очевидно, что настоящее изобретение, описанное на предпочтительных примерах его осуществления, допускает внесение изменений по форме исполнения и в деталях, не выходя за пределы сущности и объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный одноступенчатый центробежный насос | 2019 |
|
RU2713309C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ КОНЦЕВЫХ УПОРОВ | 2016 |
|
RU2652266C2 |
| ГОМОГЕНИЗАТОР ВЫСОКОГО ДАВЛЕНИЯ | 2019 |
|
RU2767660C1 |
| УСТАНОВКА НАСОСНАЯ ПОРШНЕВАЯ | 2008 |
|
RU2387876C2 |
| БУРОВОЙ НАСОС ПРЯМОГО ПРИВОДА С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2575721C2 |
| УСОВЕРШЕНСТВОВАННЫЙ СИЛОВОЙ ПРИВОД КЛАПАНА | 2007 |
|
RU2461039C2 |
| УСТАНОВКА НАСОСНАЯ ПЛУНЖЕРНАЯ ПОГРУЖНАЯ И ЕЕ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2422676C2 |
| ПЕРЕДАЧА ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГОДВИЖЕНИЯ | 1970 |
|
SU427192A1 |
| НАСОС ВЫСОКОГО ДАВЛЕНИЯ ДЛЯ НАГНЕТАНИЯ ВЫСОКОВЯЗКОГО МАТЕРИАЛА | 2016 |
|
RU2682302C1 |
| НАСОСНАЯ СИСТЕМА | 2006 |
|
RU2323370C2 |
Изобретение относится к приводным насосным системам прямого вытеснения для возвратно-поступательных насосов и способам управления возвратно-поступательным движением. Система содержит электродвигатель, насос, преобразователь и контроллер. Электродвигатель содержит вращающийся выходной вал, выполненный с возможностью вращения в первом направлении вращения и противоположном ему втором направлении вращения. Насос содержит входной линейно перемещаемый вал, выполненный с возможностью перемещения в первом линейном направлении и противоположном ему втором линейном направлении. Преобразователь соединяет выходной вал с входным валом так, что вращение выходного вала в первом направлении вращения сообщает поступательное движение входному валу в первом линейном направлении, и вращение выходного вала во втором направлении вращения сообщает входному валу поступательное движение во втором линейном направлении. Контроллер многократно реверсирует вращение выходного вала и обеспечивает тем самым возвратно-поступательное движение входного вала. Контроллер выполнен с возможностью постепенного увеличения длины хода вала насоса до максимальной длины хода с последующим постепенным уменьшением длины хода до минимальной длины хода. Обеспечивается увеличение ресурса по износу насосной системы. 3 н. и 13 з.п. ф-лы, 6 ил.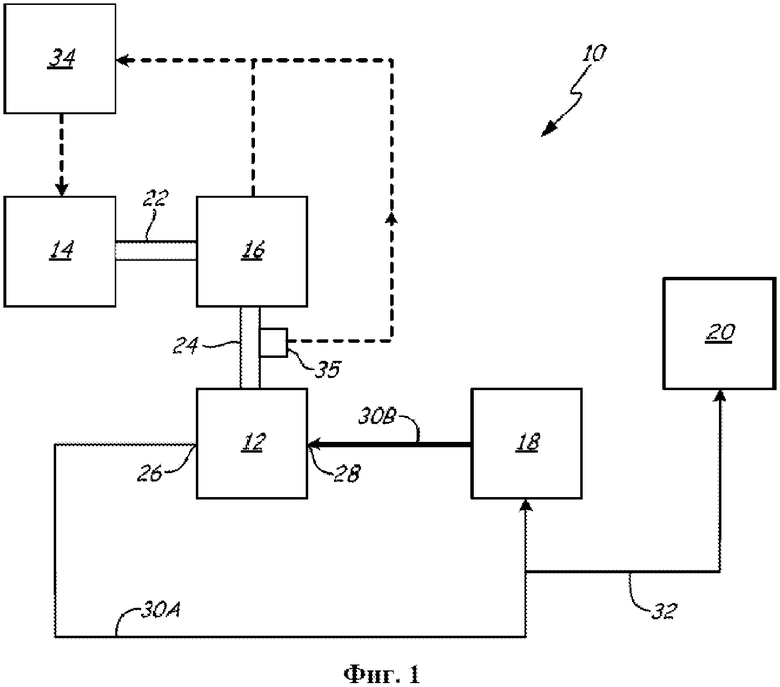
1. Насосная система (10), содержащая:
электродвигатель (14), содержащий выходной вал (22), выполненный с возможностью реверсивного вращения в первом направлении вращения и противоположном ему втором направлении вращения;
насос (12), содержащий входной вал (24), выполненный с возможностью движения в первом линейном направлении и противоположном ему втором линейном направлении; и
преобразователь (16), соединяющий выходной вал с входным валом так, что:
вращение выходного вала в первом направлении вращения вызывает поступательное перемещение входного вала в первом линейном направлении;
вращение выходного вала во втором направлении вращения вызывает поступательное перемещение входного вала во втором линейном направлении; и
контроллер (34), который многократно реверсирует направление вращения выходного вала, вызывая возвратно-поступательное движение входного вала,
при этом электродвигатель представляет собой бесщеточный электродвигатель постоянного тока; и
при этом контроллер выполнен с возможностью реверсирования направления электрического тока, подаваемого в электродвигатель, для реверсирования вращения выходного вала, а также с возможностью постепенного увеличения длины хода вала насоса до максимальной длины хода с последующим постепенным уменьшением длины хода до минимальной длины хода.
2. Насосная система по п. 1, отличающаяся тем, что насос выполнен в виде насоса прямого вытеснения.
3. Насосная система по п. 1, отличающаяся тем, что преобразователь содержит реечную передачу.
4. Насосная система по п. 3, отличающаяся тем, что преобразователь дополнительно содержит зубчатый редуктор.
5. Насосная система по п. 4, отличающаяся тем, что зубчатый редуктор выполнен в виде двухступенчатого редуктора.
6. Насосная система по п. 1, отличающаяся тем, что контроллер поддерживает постоянный крутящий момент на выходе электродвигателя.
7. Насосная система по п. 1, отличающаяся тем, что контроллер изменяет время между реверсами направления электрического тока от одного реверса к следующему.
8. Способ управления работой насоса (12), при этом способ включает:
многократное реверсирование направления электрического тока, подаваемого в электродвигатель (14), вызывая попеременное вращение выходного вала (22) двигателя в направлениях по часовой стрелке и против часовой стрелки;
преобразование попеременного вращения выходного вала в возвратно-поступательное линейное движение вала (24) насоса; и одно из следующего:
изменение времени между реверсами направления электрического тока;
изменение переведения положения вала насоса, при котором вал насоса меняет направление линейного поступательного движения; и
постепенное увеличение длины хода вала насоса до максимальной длины хода с последующим постепенным уменьшением длины хода до минимальной длины хода,
при этом электродвигатель представляет собой бесщеточный электродвигатель постоянного тока.
9. Способ по п. 8, отличающийся тем, что насос выполнен в виде насоса прямого вытеснения.
10. Способ по п. 8, отличающийся тем, что преобразование попеременного вращения выходного вала в возвратно-поступательное линейное движение вала насоса включает:
вращение шестерни вместе с выходным валом;
поступательное перемещение зубчатой рейки вместе с шестерней.
11. Способ по п. 8, отличающийся тем, что:
вращение выходного вала в направлении по часовой стрелке вызывает линейное перемещение вала насоса в первом направлении; и
вращение выходного вала в направлении против часовой стрелки вызывает линейное перемещение вала насоса во втором, противоположном, направлении.
12. Способ по п. 8, отличающийся тем, что дополнительно включает:
подачу в электродвигатель постоянного электрического тока для поддержания постоянного крутящего момента;
поддержание постоянного давления на выходе насоса.
13. Способ по п. 8, отличающийся тем, что время между реверсами направления электрического тока изменяют по шаблону с регулярным повторением.
14. Способ по п. 8, отличающийся тем, что время между реверсами направления электрического тока изменяют произвольным образом.
15. Насосная система, содержащая:
бесщеточный электродвигатель постоянного тока, содержащий вращающийся выходной вал;
насос прямого вытеснения, содержащий входной вал, выполненный с возможностью линейного перемещения;
реечный преобразовательный механизм, соединяющий выходной вал с входным валом так, что вращение выходного вала в направлении по часовой стрелке сообщает входному валу поступательное движение в первом направлении, и вращение выходного вала в направлении против часовой стрелки сообщает входному валу поступательное движение во втором, противоположном, направлении; и
контроллер, который многократно реверсирует направление вращения выходного вала и тем самым вызывает возвратно-поступательно перемещение входного вала,
при этом контроллер выполнен с возможностью постепенного увеличения длины хода вала насоса до максимальной длины хода с последующим постепенным уменьшением длины хода до минимальной длины хода.
16. Насосная система по п. 15, отличающаяся тем, что реечный преобразовательный механизм содержит:
шестерню, соединенную с выходным валом;
зубчатую рейку, соединенную с входным валом; и
зубчатый редуктор, соединенный с шестерней и зубчатой рейкой.
| US 4093404 A, 06.06.1978 | |||
| US 6577089 B1, 10.06.2003 | |||
| US 1984296 A, 11.12.1934 | |||
| US 5284423 A, 08.02.1994. |

