Область техники, к которой относится изобретение
Настоящее изобретение относится к силовым приводам клапанов и касается усовершенствований в них, и, в частности, но не исключительно, применимо для регулируемых силовых приводов, используемых для управления клапанами, изменяющими поток (расход) текучих сред в магистрали, как правило, по сигналу измерения параметров процесса. Такие силовые приводы должны обладать высокой точностью и обеспечивать грубую и точную регулировку расхода текучей среды в магистрали, а не просто полностью перекрывать или открывать магистраль.
Предшествующий уровень техники
Силовые приводы клапанов находят широкое применение, например, на тепловых и гидроэлектростанциях, при добыче нефти и газа, в судовых установках, коммунальном водоснабжении и химической промышленности. В большинстве таких приложений силовые приводы должны быть достаточно мощными и приспособленными к уровню выходной нагрузки, составляющей от примерно 3 Нм до примерно 1200 Нм для поворотного выхода или от 100 Н до 30000 Н для линейного выхода. Силовые приводы клапанов могут быть пневматическими, гидравлическими, электрическими, электрогидравлическими, но наиболее распространены пневматические, так как при достаточном уровне точности и надежности они наименее дороги. В общем все силовые приводы клапанов имеют процессорное регулирование для установки, мониторинга и управления силовым приводом. Ключевые параметры управления (регулирования) включают положение силового привода, то есть положение клапана, и крутящий момент (прежде всего для силовых приводов с поворотным выходом) или осевое усилие (прежде всего для силовых приводов с линейным выходом). Например, в силовых приводах с поворотным выходом положение клапана определяют путем подсчета с помощью преобразователя углового положения в код числа оборотов или определения части оборота поворотного выходного приводного вала. Усилие, развиваемое на выходном валу силового привода, для таких приводов обычно определяют механическими устройствами, такими как датчики деформации или преобразователи давления. Усилие можно также определить по крутящему моменту, связанному с током двигателя. Примеры таких механизмов описаны в US 4288665 и GB 2101355.
В добавление к приведенным свойствам силовые приводы клапанов обычно снабжают средством работы в отказоустойчивом режиме, если, например, произойдет сбой подачи электропитания. С этой целью большинство силовых приводов снабжают также возвратным механизмом с пружиной сжатия для возвращения силового привода в требуемое при отказоустойчивом режиме положение. Однако это все же требует при нормальной работе затраты относительно большого количества энергии только на преодоление силы возвратной пружины.
В альтернативном варианте при сбое используют накопленную электрическую энергию для подачи питания, достаточного для перемещения клапана в отказоустойчивое положение. Примеры такого подхода приведены в US-A-5278454, US-A-5744923 и GB-A-2192504.
При нормальных условиях на коэффициент полезного действия и на эффективность работы силового привода отрицательно влияет ряд факторов, в которые входят износ зубчатых передач, насыщение контроллера, влияние люфта и перерегулирование. Последние факторы, которые можно назвать факторами "прерывистого перемещения", обычно присущи силовым приводам клапанов и могут служить доказательством трудности сохранения эффективности работы при ступенчатом регулировании по замкнутому контуру обратной связи, применяемом в управляемых силовых приводах клапанов, в которых требуются быстрые и часто на малые величины подстройки положения клапана для управления процессом. Контроллер должен прежде всего выработать достаточную энергию, необходимую для развития стартового осевого усилия или крутящего момента, и затем должен попытаться быстро переместить клапан в необходимое положение. Для преодоления большой начальной нагрузки контроллер часто будет входить в режим насыщения, и, следовательно, будет происходить перерегулирование (когда контроллер вырабатывает полную мощность, а нагрузка мгновенно исчезает при полной мощности, все еще выдаваемой контроллером), что приведет к перебегу клапана относительно необходимого положения и возникновению нестабильности в замкнутом контуре управления.
Силовые приводы клапанов, приводимые в действие пневматически, наряду с другими силовыми приводами, оснащают большей частью возвратной пружиной для работы в отказоустойчивом режиме при отключении питания, и соответственно они являются системами с балансировкой усилия, в которых давление воздуха выбрано таким, чтобы соответствовать силе пружины, трению штока клапана и усилию на штоке. Это может вызвать проблему прерывистого перемещения, когда при росте или снижении давления, чтобы сделать небольшое перемещение клапана, происходит резкое изменение трения, которое может вызвать скачкообразное перемещение силового привода на расстояние, превышающее необходимое. Он может также совершать нежелательные движения из-за изменения усилия на штоке клапана, так как это приводит к разбалансу сил, и силовому приводу приходится изменять давление воздуха, чтобы скомпенсировать этот разбаланс.
Силовые приводы клапанов, приводимые в действие электродвигателями, являются более устойчивыми системами и не страдают в такой большой степени от величины усилия на штоке, перемещающего его из заданного положения.
Силовые приводы клапанов, приводимые в действие электродвигателями, также чувствительны к проблеме прерывистого перемещения, хотя и в меньшей степени, чем пневматические. Однако они могут быть подвержены ухудшению управления из-за наличия люфтов в приводном механизме. При смене направления движения двигателю нужно сначала выбрать люфт, прежде чем на выходе начнется движение. В обычных системах с одним датчиком на выходе контроллер будет увеличивать скорость двигателя при обнаружении, что на выходе движение отсутствует, и затем, после выбора люфта выходной элемент будет резко проскакивать необходимое положение, в особенности если все, что требуется, это небольшое перемещение. В современных электрических силовых приводах основной подход к преодолению этого заключается в сведении люфта к минимуму за счет использования высокоточных зубчатых передач и в выборе низкого передаточного отношения часто в сочетании с применением дорогих шаговых двигателей (синхронных) повышенной мощности. Это в сочетании с требованиями долговечности в непрерывном режиме работы делает приводной механизм очень дорогим.
В задачи настоящего изобретения входит создание регулируемого силового привода, отличающегося от известных и соответственно усовершенствованного по сравнению с известными силовыми приводами, и смягчение одной или более ранее упомянутых или рассмотренных далее проблем в работе.
Краткое изложение сущности изобретения
В соответствии с первым аспектом изобретения предложен силовой привод клапана, снабженный приводным электродвигателем с валом двигателя и выходным валом, связанным с валом двигателя и предназначенным для придания движения клапану, причем силовой привод снабжен также системой управления, приспособленной для управления по первому замкнутому контуру обратной связи выходным валом силового привода и включающей контроллер, соединенный с первым датчиком положения, предназначенным для регистрации положения выходного вала силового привода, и со вторым датчиком положения, предназначенным для регистрации положения вала двигателя и приспособленным для определения скорости вала двигателя, причем система управления выполнена с возможностью реагирования на зарегистрированные сигналы с первого и второго датчиков и в соответствии с этим регулирования скорости (положения) двигателя. Контроллер соответственно работает на частоте, по меньшей мере в пять раз превышающей частотный диапазон электродвигателя, и предпочтительно контроллер выполнен так, что он опрашивает первый и(или) второй датчик с периодом, меньшим одной десятой механической постоянной времени силового привода.
За счет использования двух датчиков для регулирования по замкнутому контуру обратной связи и преодоления тем самым проблемы прерывистого перемещения достигается высокий уровень точности и надежности регулирования при одновременном устранении необходимости в использовании высокоточных зубчатых передач с малым люфтом.
Соответственно при правильном выборе материалов и конструкции, обеспечивающих требуемую долговечность, теперь возможно изготовление недорогих приводных механизмов, работающих с наивысшей степенью точности.
Предпочтительно чувствительность второго датчика (двигателя), то есть число отсчетов датчика на диапазон рабочего хода вала двигателя, достаточно высока, чтобы можно было регулировать скорость выходного вала с точностью по меньшей мере до двух, и предпочтительно по меньшей мере до одного процента от полной рабочей скорости выходного вала.
Контроллер приспособлен для работы на частоте, по меньшей мере в пять раз превышающей частотный диапазон электродвигателя. Должно быть понятно, что частотный диапазон работы электродвигателя определяется временем, за которое двигатель набирает свою постоянную скорость, определяемую переходным состоянием или режимом загрузки. Это часто соответствует приближению первого порядка от изменения скорости при воздействии на входе единичного сигнала. В системе первого порядка установившееся состояние (99% от конечной величины) достигается за промежуток, равный пяти постоянным времени, а за промежуток, равный одной постоянной времени, такая система достигает 63% от установившегося состояния (скорости).
Чувствительность выходного датчика должна соответственно быть порядка 0,025% полного хода выходного вала, то есть он должен давать 4000 отсчетов на полный ход выходного вала. Чувствительность датчика двигателя соответственно по меньшей мере в 100 раз выше чувствительности выходного датчика, и он должен выдавать, например, 323 отсчета на каждый отдельный отсчет выходного датчика.
Контроллер предпочтительно включает контур регулирования по положению, выполненный так, чтобы удерживать выходной элемент силового привода в заданной рабочей точке. В контур регулирования по положению входит второй контур, включающий пропорционально-интегрально-дифференциальный контроллер (ПИД-контроллер), поддерживающий скорость двигателя на внутренне определенном необходимом значении. Ошибка по положению возникает, когда изменяется требуемое положение или когда приложение нагрузки приводит к изменению положения выходного элемента. Контроллер получает сигналы с датчиков как выходного вала, так и двигателя, и определяет сигнал корректирующего воздействия на привод двигателя путем расчета, основанного на ошибке (пропорционально), сумме всех предшествующих ошибок (интегрально) и скорости изменения ошибки (дифференциально).
В соответствии со вторым аспектом изобретения предложен силовой привод клапана с линейным выходом, содержащий приводной электродвигатель, соединенный соответствующим образом для осевого перемещения выходного вала силового привода, причем выходной вал заканчивается в преобразователе осевого усилия, имеющем в общем центральную часть первой втулки, соединенную с выходным валом, причем первая втулка включает также наружное кольцо, приспособленное для соединения непосредственно или непрямо с управляемым клапаном, а также выполненную из материала меньшей толщины перегородку, связывающую указанную центральную часть с наружным кольцом и выполненную с возможностью прогиба под действием усилия, приложенного между центральной частью и наружным кольцом, при этом преобразователь содержит по меньшей мере один датчик деформации, установленный на перегородке и приспособленный для регистрации деформации перегородки при ее прогибе и, таким образом, при работе дающий индикацию усилия, приложенного выходным валом к регулируемому клапану.
Обычно в первую втулку помещают электронные компоненты предварительной обработки сигналов, поступающих с датчика деформации или с каждого датчика деформации, и сигнал с датчика деформации или с каждого датчика деформации может быть передан по сигнальной цепи, проходящей внутри выходного вала. Преимущество заключается в том, что нет необходимости прокладывать кабели вне силового привода, выводя их через уплотняющие сальники или аналогичные узлы, и они, таким образом, остаются защищенными наружной оболочкой привода.
В соответствии с еще одним аспектом изобретения предложен силовой привод клапана, снабженный приводным электродвигателем с валом двигателя и выходным валом, связанным с валом двигателя и предназначенным для придания движения клапану, причем силовой привод снабжен также системой управления, содержащей контроллер, выполняющий управление клапаном по замкнутому контуру обратной связи, причем силовой привод помещен в корпус, снабженный пользовательским интерфейсом, приведение в действие которого осуществляется без открывания корпуса, и в корпусе силового привода заключен переключатель, который может быть переведен на начало выполнения обычного регулирования по замкнутому контуру путем приближения к наружной части корпуса простого, не требующего открывания корпуса и не имеющего питания узла, такого как, например, магнит.
В качестве переключателя может выступать, например, датчик Холла или герконовое реле. Для пользователя это облегчает задачу запуска в работу, так как устраняется риск искрообразования при использовании механических устройств, требующих открытия корпуса, и устраняется необходимость в доступе пользователя к вычислительной части или другому узлу беспроводного управления, и его роль сводится к простому запуску устройства в работу. Предпочтительно для безопасности пользовательский интерфейс выполнен таким образом, что при удалении узла из от переключателя выполнение обычных операций приостанавливается.
В соответствии с еще одним аспектом изобретения предложен силовой привод клапана, снабженный приводным электродвигателем, зубчатым приводным механизмом и выходным валом, перемещающим регулирующий клапан между состояниями с различной степенью открытости для регулирования скорости потока текучей среды в магистрали, причем силовой привод снабжен блокирующим фиксатором для блокировки одной или более шестерен зубчатого приводного механизма в определенном положении, что тем самым обеспечивает режим "удержания на месте при потере питания", при котором фиксатор удерживается пружинным средством смещения в зацеплении с колесом приводного механизма, из которого удаляется соленоидом, шток которого оттягивает фиксатор из зацепления с колесом, преодолевая силу пружинного средства смещения.
Предпочтительно блокирующий фиксатор содержит первое колесо, снабженное одним или более выступающими в осевом направлении блокирующими штифтами, приспособленными для сцепления с одним или более проходящими по радиусу пазами в непрерывно перемещаемом втором колесе, причем первое и второе колесо выполнены с возможностью вращения в параллельных плоскостях, и плоскость первого колеса подвижна в направлении к плоскости второго колеса до перемещения в блокирующее положение под воздействием средства смещения в случае отсутствия питания на соленоиде, что тем самым приводит к вхождению блокирующего штифта в паз.
Первое колесо может также содержать приводное средство, такое как шлицованный вал, дающий возможность ручного вращения первого колеса, которое передается через блокирующий штифт, или через каждый блокирующий штифт, второму колесу, когда первое колесо находится в блокирующем положении, и тем самым на выходной вал.
Силовой привод с линейным перемещением выходного вала может также содержать узел поперечного крепления, включающий опорную консоль или подпорку, приспособленную для регулируемого выдвижения в направлении оси вала и размещенную вблизи той части вала, на которую воздействует зубчатое колесо (зубчатая передача) приводного механизма, что служит для сохранения ориентации оси вала и устранения люфта в узле зубчатой рейки и зубчатого колеса (реечной передачи). Соответственно эта консоль или подпорка воздействует на основание рейки.
В соответствии с еще одним аспектом изобретения предложен силовой привод клапана, снабженный приводным электродвигателем с валом двигателя и выходным валом, связанным с валом двигателя и предназначенным для придания движения клапану, причем силовой привод снабжен также системой управления, содержащей контроллер и датчик крутящего момента или осевого усилия, предназначенный для регистрации кутящего момента или осевого усилия на выходном валу, чтобы обеспечить регулирование по замкнутому контуру обратной связи крутящего момента или осевого усилия, приложенного к клапану; а также снабженный средством для работы в отказоустойчивом режиме, предназначенным для перемещения клапана в безопасное положение в случае отказа основного питания, причем средство обеспечения работы в отказоустойчивом режиме содержит по меньшей мере один дополнительный ультраконденсатор (большой емкости), приспособленный для подачи питания на электродвигатель и систему управления, чтобы переместить клапан в безопасное положение при сохранении возможности регулирования крутящего момента (осевого усилия).
Такое средство дает пользователю выигрыш в расходе энергии и снижении стоимости, а также вводит узел, обеспечивающий полное регулирование крутящего момента (осевого усилия) при возвращении силового привода в желательное отказоустойчивое состояние, и позволяющий пользователю поддерживать в отказоустойчивом режиме усилие на требуемом уровне для каждого устройства, что позволяет безопасно переустановить клапан без воздействия на него недостаточной или избыточной нагрузки.
Предпочтительно в отказоустойчивом режиме питание подается через повышающий преобразователь с одного или более дополнительного конденсатора емкостью 30 Ф или более. Повышающий преобразователь должен обеспечивать напряжение, достаточное для вращения двигателя со скоростью, требуемой в отказоустойчивом режиме, и ток, достаточный для работы при полной нагрузке. Предпочтительно конденсаторы должны заряжаться через понижающий преобразователь с ограниченным током до напряжения, обеспечивающего в процессе действия конденсаторов количество энергии, достаточное для перемещения в отказоустойчивом режиме на всю величину хода при полном усилие.
В соответствии с другим аспектом изобретения предложен силовой привод клапана, снабженный приводным электродвигателем с валом двигателя и выходным валом, связанным с валом двигателя и предназначенным для придания движения клапану, причем силовой привод снабжен также системой управления, содержащей контроллер и датчик крутящего момента или осевого усилия, предназначенный для регистрации кутящего момента или осевого усилия на выходном валу, чтобы обеспечить регулирование по замкнутому контуру обратной связи крутящего момента или осевого усилия, приложенного к клапану, причем в силовом приводе контроллер или дополнительный процессор, в процессе работы соединенный с контроллером, периодически регистрирует действительное значение крутящего момента (осевого усилия), и эти данные могут быть доступны для сравнения с накопленными данными (профилями данных).
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематичный вид в перспективе силового привода клапана;
на фиг.2 - схематичный вид в перспективе под другим углом силового привода клапана с фиг.1;
на фиг.3 - принципиальная электрическая схема системы управления;
на фиг.4 - блок схема контуров регулирования по замкнутой обратной связи системы управления силового привода;
на фиг.5 - выходной вал и зубчатая рейка, а также крепежный элемент, расположенный вблизи вала и предназначенный для придания ему устойчивости;
на фиг.6 - разрез силового привода, включая преобразователь осевого усилия по данному изобретению;
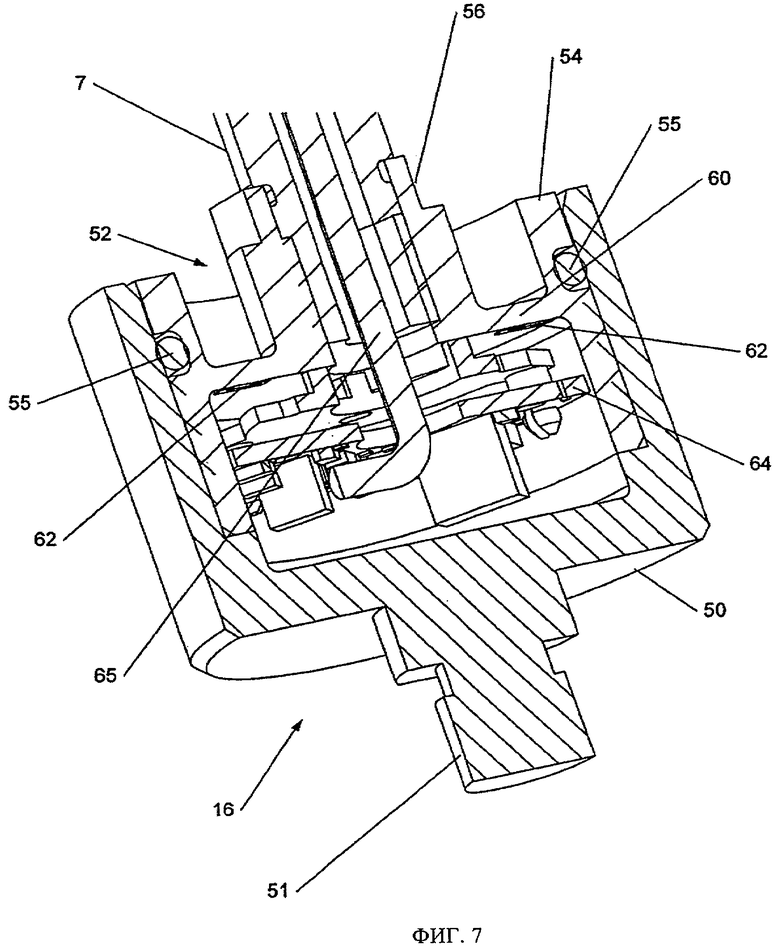
на фиг.7 - увеличенный разрез преобразователя осевого усилия по данному изобретению;
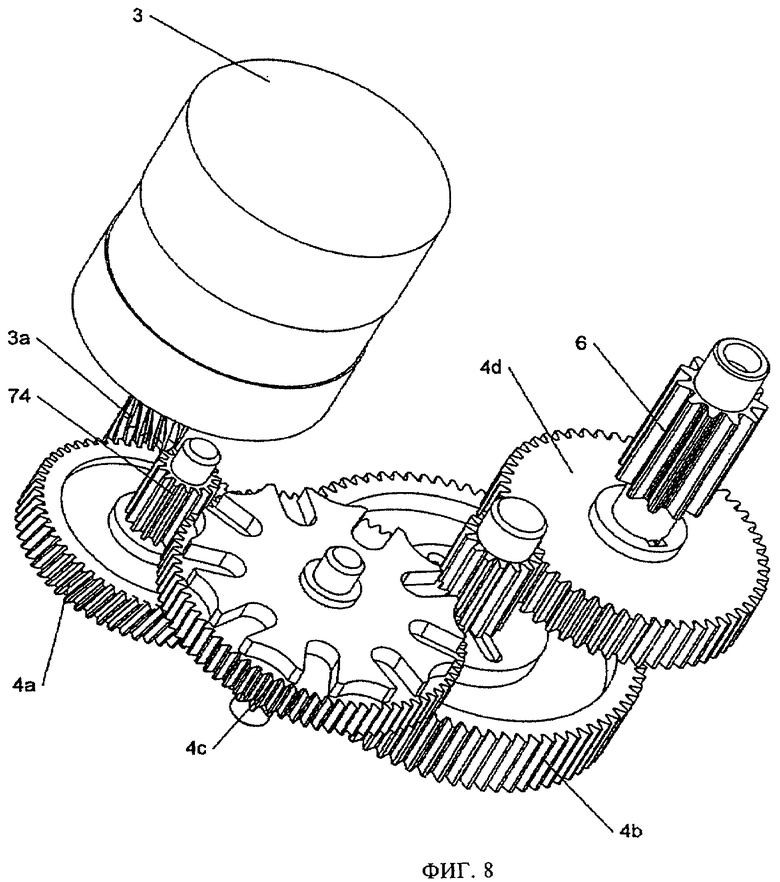
на фиг.8 - вид в перспективе "женевского механизма блокировки" по данному изобретению;
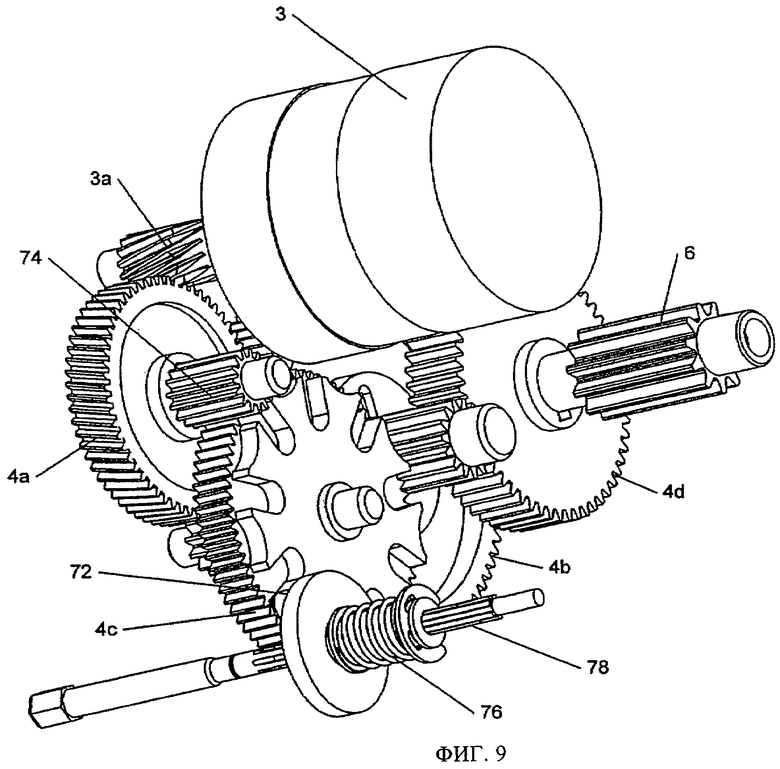
на фиг.9 - альтернативный вид в перспективе механизма с фиг.8; и
на фиг.10 - вид в плане механизма с фиг.8 и 9.
Подробное описание предпочтительного варианта выполнения изобретения
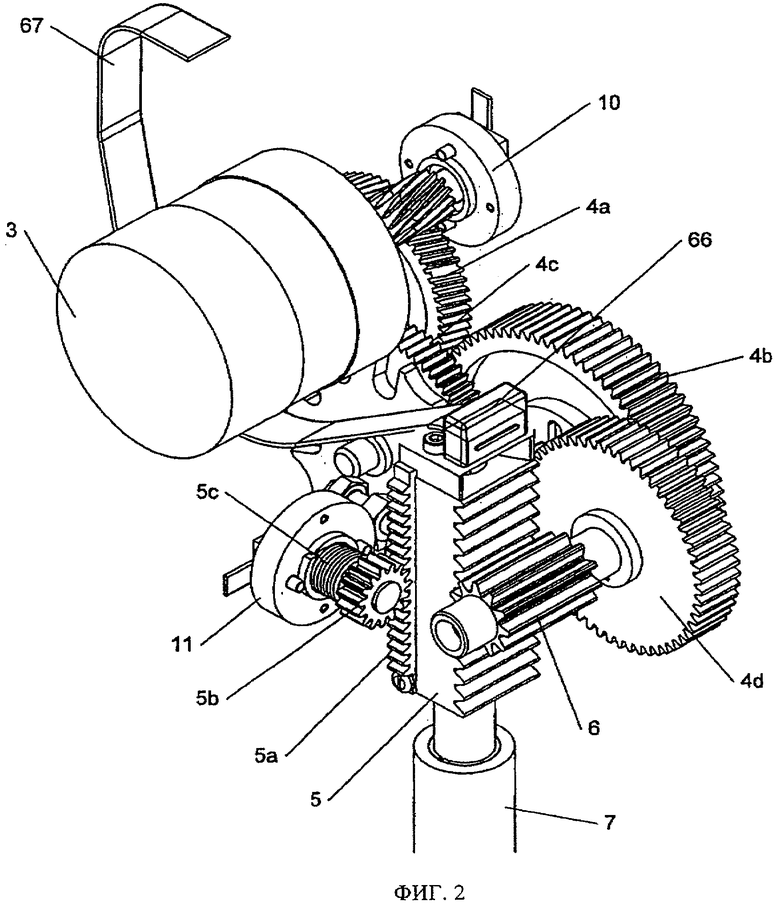
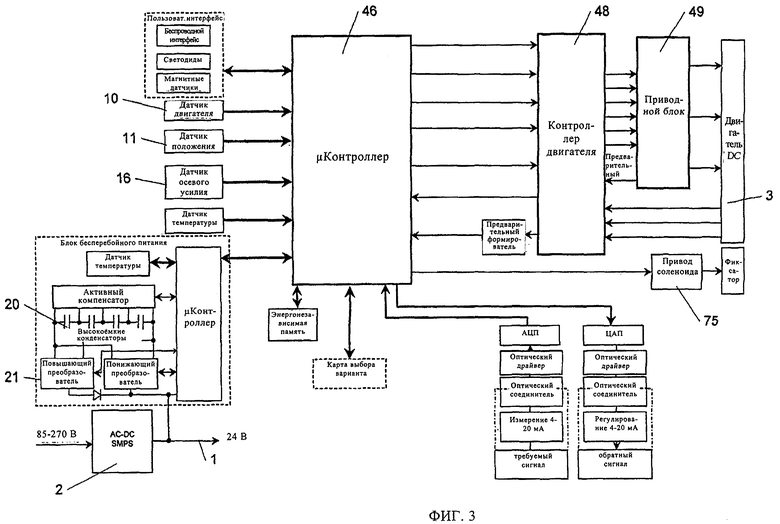
Как видно на фиг.1-4, система управления обычно включает линию 1 подвода питания постоянного тока (DC), обеспечиваемого импульсным источником 2 питания (ИИП) постоянного/переменного тока (DC/AC), вырабатывающим напряжение, необходимое для тягового электродвигателя 3 и электронных схем. Тяговый двигатель 3 силового привода может представлять собой двигатель постоянного тока с постоянными магнитами, обеспечивающий через цепочку цилиндрических шестерен 4a-4d перемещение зубчатой рейки 5 и ведущего зубчатого колеса (шестерни) 6. Зубчатая рейка 5 соединена с выходным валом 7 силового привода, создающим линейное выходное перемещение, необходимое для изменения степени открытия регулирующего клапана. На чертежах регулирующий клапан не показан.
Тяговый электродвигатель 3 постоянно связан с линией 1 подвода питания, и на него подается напряжение, изменяемое контроллером 48 двигателя и приводным блоком 49, для вращения двигателя и изменения его скорости и(или) момента.
Первый бесконтактный цифровой датчик 11 положения, преимущественно представляющий собой преобразователь углового положения вала в код, помещен вблизи края ведущей шестерни 6, перемещающей выходной вал 7 силового привода, для регистрации положения выходного вала 7. Находящийся у края ведущей шестерни 6 датчик 11 положения связан с вторичной зубчатой рейкой 5а, установленной на боковой стороне зубчатой рейки 5, таким образом, что, когда при работе зубчатая рейка 5 совершает возвратно-поступательные перемещения, вторичная зубчатая рейка 5a соответственно также движется возвратно-поступательно и приводит в движение ведущую шестерню 5b, перемещающую магнит.
Датчик 11 положения следит за положением магнита. Пружина 5c кручения обеспечивает отсутствие зазора между приводным зубчатым колесом и зубцами на приводной рейке 5a. Датчик 11 реагирует на абсолютное угловое положение шестерни 5b, то есть регистрирует число поворотов шестерни 5b, сделанное из реперного положения, такого как положение, соответствующее одной из крайних точек рабочего хода выходного вала 7. Этот датчик 11 углового положения предпочтительно представляет собой абсолютный преобразователь углового положения вала в код, отражающий каждое угловое положение вала индивидуальным кодовым сигналом.
В альтернативном варианте выполнения положение выходного вала 7 в диапазоне рабочего хода может быть зарегистрировано бесконтактным датчиком линейного перемещения, а не преобразователем углового положения вала в код. Такие датчики могут быть построены на использовании магнитных, индуктивных или оптических технологий.
Второй бесконтактный цифровой датчик 10 положения установлен у конца приводного вала 3a двигателя 3 для регистрации углового положения приводного вала 3a и тем самым определения скорости вращения этого вала.
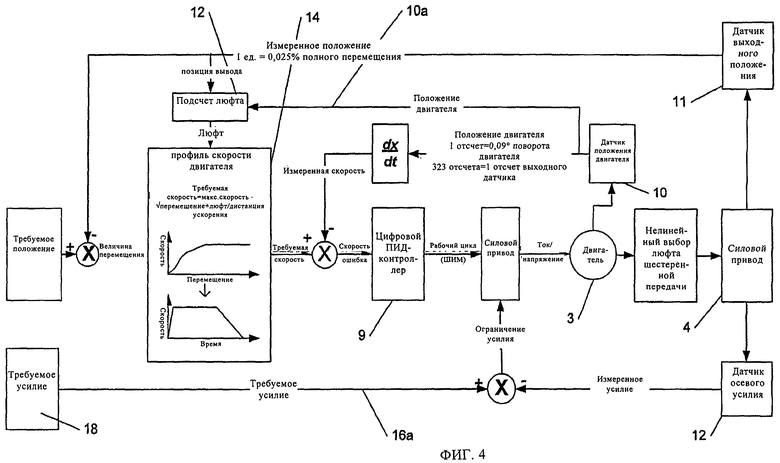
Использование двух датчиков положения 10, 11 для позиционирования узла и предотвращения перерегулирования очень важно. Как было отмечено выше, понятно, что возникновение прерывистой работы, имеющее место в регулирующих клапанах, является основным недостатком, снижающим эффективность регулирования по замкнутой обратной связи. Часто для поддержания процесса регулирования требуется сделать незначительную подстройку положения клапана. Во-первых, контроллер 9 должен определить соответствующее значение мощности, которую необходим развить, чтобы получить требуемое осевое усилие (момент), и затем попытаться установить клапан в нужное положение. Часто контроллер 9 переходит в состояние насыщения (поэтому происходит перебег), чтобы преодолеть большую нагрузку, и затем клапан проскакивает необходимое положение, что приводит к нестабильности контура регулирования. Чтобы избежать такой ситуации, в системе управления используют следующие параметры обратной связи:
абсолютное положение выходного вала силового привода;
положение вала двигателя.
Два датчика 10, 11 можно эффективно объединить для образования "супердатчика", который не только определяет малые изменения положения выходного вала 7, но также обнаруживает любые перемещения вала 3а двигателя.
Устройство системы таково, что датчик 10 вала двигателя обладает высокой чувствительностью к даже малым перемещениям (отклонениям) выходного вала 7. Цифровой контур регулирования скорости двигателя построен на ПИД-контроллере 9, работающем на частоте, обычно примерно в 5 раз превышающей частотный диапазон системы первичный приводной механизм/двигатель 3 постоянного тока (то есть в 5 раз быстрее постоянной времени механической части). Благодаря быстроте работы контура регулирования и чувствительности датчика 10 вала двигателя скорость двигателя может быть измерена и изменена без заметного изменения положения выходного датчика 11.
Для дальнейшего улучшения параметров работы контроллера 9 используют следующие дополнения: вводят два контура обратной связи - обратная связь 11a по положению клапана, основанная на выходном датчике 11, и обладающая высоким разрешением обратная связь 10a по скорости двигателя, основанная на датчике 10 положения двигателя.
Исходное требование по скорости вырабатывается в контуре 11а положения клапана. Для малых величин перемещения требуемая скорость мала, а для больших перемещений высока. Поэтому, когда при трогании с места требуется перемещение на очень мало расстояние, контроллер скорости получает большой положительный сигнал рассогласования скорости из-за высокой чувствительности измерения скорости, что выводит контроллер из насыщения. Поэтому такая система не испытывает проблем прерывистого перемещения, осуществляя регулирование без перебега.
Система управления может быть улучшена за счет выработки значения необходимой скорости на основе известного механического люфта в зубчатой передаче и других компонентах, связывающих двигатель 3 с выходным валом 7. Как показано далее, этот люфт можно проконтролировать и подсчитать с использованием датчиков 10 и 11. При знании этой величины требуемую скорость можно преднамеренно увеличить, если известно, что направление движения двигателя меняется на обратное (ситуация, в которой ясно, что люфт будет влияющим фактором). Следовательно, люфт может быть быстро выбран, и затем требуемая скорость снижена (например, когда выходной вал 3а двигателя пройдет известное расстояние), так как движение передается клапану через зубчатую передачу и выходной вал 7.
Это обеспечивает намного лучшее время установления контура регулирования выходного вала, так как влияние механического люфта на этот контур может быть нейтрализовано за счет подсчета требуемой скорости и подстройки контура регулирования скорости двигателя.
Поэтому в систему управления, представленную на фиг.4, включен блок 12 подсчета люфта, передающий значение люфта в блок 14 вычисления профиля скорости двигателя, который в свою очередь вырабатывает значение требуемой скорости двигателя.
Так как устройство снабжено одним датчиком 10 положения в начале зубчатой передачи 4a-4e, 5, 6 и одним датчиком 11 положения в конце, существует определенное соотношение между положением датчиков 10, 11. Это может быть использовано для измерения люфта в приводном механизме за счет отслеживания изменения положения датчика 10 двигателя к моменту начала перемещения выходного датчика 11 при смене направления движения. Возрастание люфта должно свидетельствовать об износе приводного механизма 4a-4d, 5, 6.
В системах, в которых приводной механизм всегда работает в одном направлении и люфт отсутствует, все же есть возможность определения возрастания износа. Это можно сделать, наблюдая за выходным сигналом с цифрового датчика 10 двигателя в определенном положении выходного цифрового датчика 11. Если соотношение между ними изменяется, это должно свидетельствовать об износе приводного механизма.
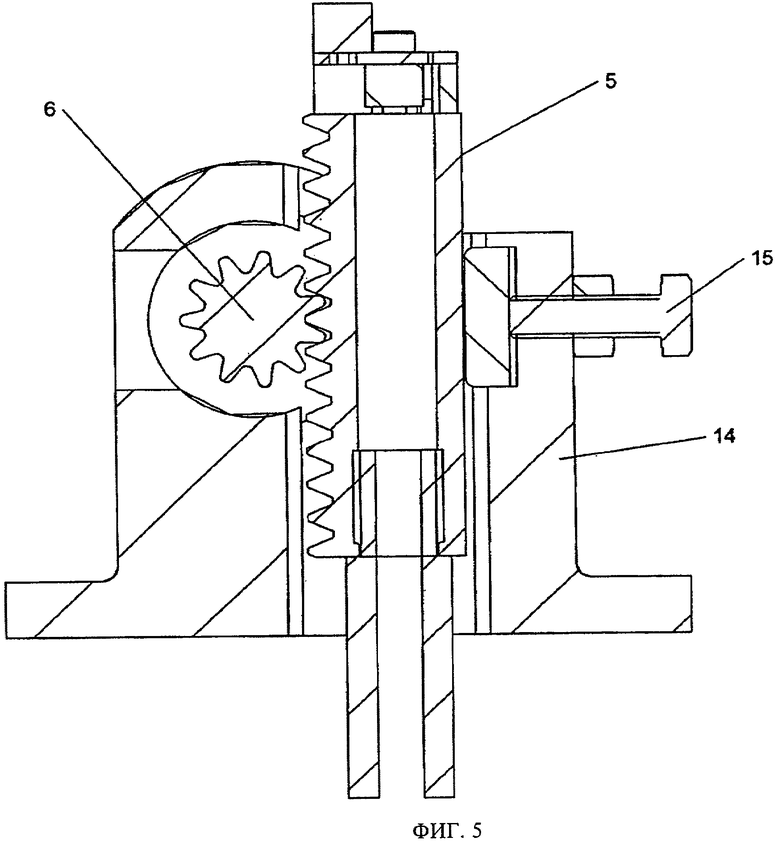
Зубчатая рейка 5 и узел выходного вала 7 закреплены (как показано на фиг.5) в корпусе 14 в том числе регулируемой/выдвижной опорной консолью/подпоркой 15, противолежащей относительно точки контакта между ведущей колесом 6 и рейкой 5. Опора выполнена регулируемой для устранения люфта между рейкой 5 и зубцами ведущей шестерни. Закрепление в этой точке делает также ненужным продолжение вала 7 над верхом рейки 5, что могло бы увеличить размеры узла.
Обращаясь к фиг.6 и 7, можно сказать, что измерение осевого усилия, развиваемого силовым приводом, можно выполнить с использованием преобразователя 16, установленного на конце выходного вала силового привода. При подробном рассмотрении разреза, представленного на фиг.6 и в увеличенном виде на фиг.7, видно, что вал 7 перемещается линейно с помощью узла зубчатой рейки и шестерни 5 и 6. Движение клапану передается через наружную втулку 50, заканчивающуюся соединительным выступом 51, связанным с клапаном. Движение от двигателя (на фиг.6 и 7 не показан) передается наружной втулке 50 через внутреннюю втулку 52.
Внутренняя втулка 52 содержит наружное кольцо 54 с резьбой, сопрягающееся с внутренней резьбовой поверхностью наружной втулки 50 и уплотненное относительно втулки 50 кольцевой прокладкой 55, причем в общем центральная соединительная часть 56 втулки закреплена на в основном жестком выходном валу 7, приводимом в движение зубчатой рейкой и колесом, а упругая кольцевая тонкостенная перегородка 60 связывает соединительную часть 56 с наружным кольцом 54.
При возвратно-поступательном движении вала 7 перегородка 60 прогибается. Прогиб регистрируют датчиками 62 деформации, установленными на перегородке, что дает возможность измерения усилия в месте скрепления силового привода с клапаном.
Встроенный в соединительный узел усилитель на печатной плате усиливает выходные сигналы датчиков деформации, и выходной сигнал с усилителя поступает в силовой привод по кабелю 65, пропущенному через канал, сформированный в выходном валу 7.
Это обеспечивает очень точное измерение усилия, требуемого для перемещения клапана.
Выходной сигнал с датчиков 16 деформации формирует первичный сигнал обратной связи в контуре 16a регулирования осевого усилия (фиг.4). Прежде всего аналоговая схема обрабатывает сигнал осевого усилия для устранения шумов результатов измерения. Отфильтрованный сигнал имеет больший частотный диапазон, чем силовой привод, и подается в контроллер. Если обработанный результат измерения осевого усилия датчиком 16 деформации меньше требуемого значения 18, двигателю дается команда на развитие максимальной мощности. При достижении осевым усилием, развиваемым силовым приводом, установленной величины 18 ток двигателя (и, следовательно, вращающий момент, развиваемый двигателем) ограничивается до значения, при котором этот ток достаточен только для поддержания осевого усилия, большего, чем полная осевая нагрузка, с учетом коэффициента полезного действия при обратном ходе зубчатой передачи, а также присущего двигателю момента трогания. Поэтому мощность, требуемая для сдерживания нагрузки, составляет часть от той, что требуется для перемещения нагрузки. Следовательно, способ регулирования по осевому усилию поддается программированию, является точным и оптимизирован по эффективности. Что важно, регулирование по осевому усилию может быть также применено для защиты от сбоев.
Кроме того, в устройстве, представленном на фиг.6 и 7, датчики, кабельные связи и электронные схемы составляют одно целое и помещены внутрь герметизированной оболочки силового привода. Аспект изолированности очень важен, так как клапаны могут использоваться в опасных условиях и, следовательно, к силовым приводам могут предъявляться требования, например, взрывозащищенного исполнения. Помещение датчиков и соединительных кабелей внутрь силового привода позволяет избежать необходимости применения сальников и других подобных узлов, что, как известно, усложняет выполнение требований по безопасности и может привести к повреждению кабеля.
В данном варианте выполнения сигнальные и силовые кабели проходят через вал 7 к выходному блоку 66. Затем сигналы, не выходя наружу, поступают по гибкому кабелю 67 на другую печатную плату 68 в верхней части силового привода. Возвратно-поступательное перемещение вала 7 поглощается гибким кабелем 67.
В узел датчиков, сформированный во втулках 50 и 52, могут быть включены другие преобразователи, например датчик температуры, анализатор газа для обнаружения летучих компонентов и(или) акселерометр для измерения вибрации.
При дальнейшем усовершенствовании силового привода регулирующего клапана он может быть снабжен набором встроенных устройств связи. В корпус 38 силового привода помещают беспроводной радиочастотный коротковолновый приемник и передатчик. Это дает возможность связи с силовым приводом и получения сигналов от него неинтрузивным способом (без вскрытия корпуса). Силовой привод может быть снабжен (для регулирования скорости, направления движения и т.д.) беспроводным ручным пультом. При этом может быть использован стандарт беспроводной связи Bluetooth. Могут быть также использованы устройства, описанные в GB 2196494 B, и описание этого патента в части, относящейся к встроенному исполнению, включено в данный документ в качестве ссылки.
Силовой привод может быть запущен на выполнение обычных операций путем управления магнитным датчиком, находящимся внутри оболочки/корпуса силового привода, с использованием магнитного устройства, расположенного вне оболочки. Силовой привод может затем двигаться в каждом направлении попеременно до тех пор, пока не достигнет границы диапазона перемещения клапана, где будет установлено граничное положение. Силовой привод приспособлен для определения разницы между достижением границы диапазона перемещения клапана и собственными границами хода, так что при достижении собственных внутренних границ хода в датчике 16 не будет вырабатываться выходной сигнал линейного усилия. Это дает возможность выявить тот факт, например, что диапазон перемещения силового привода недостаточен для полного перемещения клапана возможно из-за того, что силовой привод и клапан не согласуются друг с другом.
Электроэнергия накапливается в дополнительных высокоемких конденсаторах 20, чтобы переместить клапан в безопасное положение в случае отключения основного источника питания. Все механизмы и связанные с ними электронные схемы помещены в пылебрызгозащищенную оболочку. Батарею высокоемких конденсаторов 20, соединенных последовательно, заряжают с использованием переключаемого источника 2 питания. Общее напряжение батареи конденсаторов намного меньше, чем напряжение, требуемое для нормальной работы двигателя. Например, если максимальное напряжение на двигателе, требуемое для его нормальной работы, составляет 24 B, то напряжение батареи должно быть равно примерно 7 B.
Чтобы поддержать постоянство скорости при работе в отсутствии питания (то есть в отказоустойчивом режиме), необходимо поднять напряжение конденсаторов и поддерживать его неизменным. Для этой цели используется работающий в токовом режиме на фиксированной частоте 300 или 500 кГц контроллер подкачки или повышающий преобразователь 21. При работе в отказоустойчивом режиме, когда требуемое питание поступает от батареи 20 конденсаторов, повышающий преобразователь 21 поддерживает стабильным выходное напряжение, поступающее на двигатель 3, даже при снижении напряжения на конденсаторах. Поэтому при работе в регулируемом отказоустойчивом режиме может быть извлечено более 70% накопленной энергии. Выходное напряжение подкачки таково, что оно меньше, чем нормальное напряжение питания, но больше того, что требуется для обеспечения необходимой скорости в отказоустойчивом режиме.
Редуктор силового привода представляет собой высокоэффективный приводной механизм на прямозубых шестернях, передающий движение от двигателя 3 на выход 7 силового привода, соединенный с клапаном. Это высокоэффективное средство не обладает способностью самоблокировки и может совершать обратное движение.
В нормальных условиях двигатель 3 получает питание и перемещает силовой привод и клапан в требуемое положение. Он также удерживает их, реагируя на любое усилие со стороны клапана, направленное на обратное перемещение силового привода и смещение его из этого положения. Таким образом, двигатель поддерживает самозаблокированное положение, необходимое для силового привода.
Однако при исчезновении питания может происходить неконтролируемое движение клапана, которое в общем нежелательно. В связи с этим предусмотрен механизм блокировки.
Как можно видеть на фиг.8-10, зубчатая передача силового привода содержит компонент 4c в виде Мальтийского креста, сопряженного со штифтами 72, что подробно описано ниже.
Эксплуатационные требования включают необходимость предусмотреть способ ручной работы силового привода при отсутствии питания двигателя, а также необходимость обеспечения самоблокировки силового привода при отсутствии питания и сохранения таким образом его положения. Хотя введение тормоза может обеспечить выполнение второго требования, это вызывает проблему преодоления сопротивления тормоза при ручном движении силового привода.
Мальтийский крест (Женевский механизм), описанный ниже, используют для обеспечения прерывистого движения, которое прекращают в определенном положении между шагами.
Движение на Женевский механизм непрерывно передается с одной из шестерен 74 приводного механизма. Зацепление блокирующих штифтов 72 обеспечивается пружинным средством 76 смещения, при нормальной работе поддерживающим состояние отсутствия зацепления за счет соленоида (не показан).
В условиях нормального питания соленоид под действием привода 75 соленоида (фиг.3) удерживает Женевский механизм 4c/72 в разомкнутом состоянии, сжимая пружину 76. При снятии питания силового привода соленоид теряет свое сдерживающее усилие, и пружина 76 перемещает Женевский механизм в осевом направлении до вхождения в зацепление. Так как Женевский механизм не имеет обратного хода, он блокирует силовой привод в определенном положении. Однако при этом Женевский механизм можно приводить в движение через ведущий вал (снаружи силового привода), используя шлицевое соединение 78 для перемещения силового привода в новое положение. При восстановлении питания силового привода соленоид снова развивает усилие, выводящее из зацепления Женевский механизм прежде, чем двигатель сможет перемещать силовой привод.
В момент снятия питания силового привода Женевский механизм может не прийти в полное зацепление, так как штифты 72 могут не совпасть с крестом 4c. Однако, когда или поворачивают ручной привод, или приводной механизм силового привода движется в обратном направлении, при перемещении будет достигнуто положение, в котором Женевский механизм придет в зацепление, так как штифты 72 переместятся в нужное положение, и пружина приведет механизм в зацепление. Максимальное перемещение, которое совершит силовой привод перед блокировкой, выбирают таким, чтобы оно было малым и приемлемым.
Иногда может возникнуть необходимость вручную переместить силовой привод при включенном питании. Это достигается путем введения снаружи привода переключателя, доступ к которому обеспечивается без открывания корпуса, и который размыкает питание соленоида. При включении переключателя и введении в зацепление ручного привода двигатель электрически защищается от движения. При отключении переключателя будет подано питание на соленоид, выйдет из зацепления ручной привод, и двигатель снова станет управляемым.
Иногда может возникнуть необходимость вручную переместить силовой привод при включенном питании. Это достигается путем введения снаружи привода переключателя, доступ к которому обеспечивается без открывания корпуса, и который размыкает питание соленоида. При включении переключателя и введении в зацепление ручного привода двигатель электрически защищается от движения. При отключении переключателя подается питание на соленоид, чтобы вывести из зацепления ручной привод, и двигатель снова становится управляемым. Чтобы поддерживать минимальным усилие, требуемое для выведения из зацепления штифтов 72 и креста 4c, двигателю при включенном соленоиде могут быть автоматически сообщены небольшие перемещения вперед и назад. Это помогает снять любые тормозящие нагрузки на штифты 72 и крест 4c, что дает возможность использовать соленоид меньшей мощности.
В данном варианте выполнения представлен силовой привод с автоматическим введением в зацепление ручного привода при потере основного питающего напряжения, а также с блокировкой силового привода в определенном положении, но все же с возможностью движения его с помощью ручного привода.
В добавление или в качестве альтернативы к нескольким описанным выше усовершенствованиям силовой привод клапана существенно улучшен введением электронного контроллера 46, обеспечивающего выполнение ряда полнофункциональных диагностических операций, способствующих реализации рутинного режима и алгоритма профилактического обслуживания. В данном случае контроллер 46 показан предпочтительно размещенным в корпусе/оболочке 39 силового привода и соответственно связанным с наружным процессором/компьютером через беспроводной интерфейс, как было рассмотрено ранее.
Одной из важных переменных величин, которую точно отслеживает контроллер 46, является выходное осевое усилие или крутящий момент. В аналогичных пневматических контроллерах заключение о величине крутящего момента или линейного усилия делают только по выходному давлению и силе пружины, а в некоторых электрических силовых приводах приблизительную величину осевого усилия или крутящего момента определяют по току двигателя. Оба таких подхода приводят к неточному измерению осевого усилия иди крутящего момента. Контроллер 46 периодически регистрирует действительное значение осевого усилия или крутящего момента, и эти данные могут быть сравнены с накопленными данными или профилями данных. Это дает возможность успешной диагностики таких параметров, как износ седла клапана и возрастание трения в уплотнениях клапана. Это более подробно рассмотрено далее.
Другой целью профилактического контроля является определение постоянства коэффициента полезного действия. Коэффициент полезного действия силового привода определяется по расчетным значениям входной и выходной мощности. Входная мощность определяется по результатам измерений тока и напряжения, а выходная мощность - по осевому усилию или крутящему моменту, скорости и ускорению. Любой износ зубчатой передачи и двигателя, связанный с тяжелыми рабочими нагрузками, приводит к уменьшению эффективности передачи мощности. Поэтому мониторинг значения коэффициента полезного действия дает возможность раннего обнаружения механического износа.
Соответственно регистрируется также статистика параметров регулирования, таких как накопленное время в каждом положении клапана, число изменений направления движения и средняя ошибка регулирования. Эти статистические данные предназначены для выполнения мониторинга регулируемого процесса.
Регистрируется также накопление энергии для работы в отказоустойчивом режиме. Это выполняется путем разрядки наружных конденсаторов на короткое время при известном токе нагрузки и подсчета емкости батареи. Таким образом выявляется любое уменьшение емкости и, следовательно, энергии, накопленной для работы в отказоустойчивом режиме.
Как было отмечено выше, двумя выходными величинами, регистрируемыми для силового привода, являются положение и осевое усилие. Диагностика или контроль состояния проводится по этим двум результатам измерений.
За счет измерения усилий на клапане, соединенном с силовым приводом, и измерения положения достигается возможность сверхточной диагностики.
Примером параметра мониторинга клапана может служить усилие, необходимое для перемещения клапана, которое равно сумме усилия на штоке клапана, развиваемого давлением в клапане, и силы трения в уплотнениях штока клапана. Усилие на штоке всегда будет действовать в одном направлении, в то время как сила трения будет действовать в обеих направлениях. Поэтому сила трения добавляется к усилию на штоке в одном направлении и вычитается из него в другом. Таким образом, точно измеряя общую силу в обеих направлениях, можно подсчитать усилие на штоке и силу трения как отдельные величины.
Эрозию седла клапана можно отслеживать путем сравнения позиции, в которой происходит нарастание осевого усилия при движении клапана к перекрытому положению.
Можно отслеживать число перемещений, и где эти перемещения происходят. Это дает сведения о том, насколько хорошо клапан регулирует процесс. Это может также дать сведения о том, что уплотнения штока клапана нуждаются в замене.
Акселерометры могут выявить вибрации, вызванные образованием раковин в клапане.
Датчики температуры могут дать информацию об утечках в уплотнениях клапана.
Используя два датчика положения, один на двигателе и другой на выходе, можно следить за величиной люфта в приводном механизме. Это обычно является индикатором износа.
Можно также проводить мониторинг выходного положения в зависимости от нагрузки и числа операций и строить график выполненной работы. Это дает индикацию износа внутри силового привода.
Можно также сравнивать усилие, развиваемое двигателем, с выходным усилием, развиваемым силовым приводом, и, следовательно, проводить мониторинг коэффициента полезного действия приводного механизма, который, как было отмечено выше, является индикатором износа.
Конструкция электронного контроллера соответствует модульной распределенной архитектуре. Это позволяет получать информацию раздельно о состоянии каждого модуля контроллера. Например, датчики положения передают информацию, касающуюся величины сигнала и достоверности измерения. Модуль питания (привод двигателя) непрерывно выдает признак отключения при перегреве, текущее состояние и т.д. Индикация признака с каждого модуля может быть использована для определения местоположения сбоя и таким образом для снижения времени простоя и ремонта.
Должно быть понятно, что применение силового привода не ограничено жидкостными клапанами, но он может быть использован, например, для воздушных заслонок и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ДЛЯ АВТОМОБИЛЯ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2673323C1 |
| Приводное устройство с энергоаккумуляторами, способ управления приводным устройством и способ управления энергоаккумуляторами приводного устройства | 2016 |
|
RU2647804C1 |
| ПРИВОД КЛАПАНА И КЛАПАННОЕ УСТРОЙСТВО | 2005 |
|
RU2402712C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ И МЕХАНИЗМ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА | 2006 |
|
RU2390665C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2671115C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА ДИФФЕРЕНЦИРОВАННОГО РАСПРЕДЕЛЕНИЯ МОЩНОСТИ | 1996 |
|
RU2171752C2 |
| СПОСОБ ДЛЯ КОМПЕНСАЦИИ ЛЮФТА В ЗУБЧАТОЙ ПЕРЕДАЧЕ МЕЖДУ РУЛЕВЫМ КОЛЕСОМ И КЛАПАНОМ РУЛЕВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2622323C2 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ | 2008 |
|
RU2465497C2 |
| СИСТЕМА И СПОСОБ ПРИМЕНЕНИЯ АКТИВНОГО МЕХАНИЗМА НАТЯЖЕНИЯ РЕМНЯ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА С РЕМЕННОЙ ПЕРЕДАЧЕЙ | 2018 |
|
RU2688613C1 |


Изобретение относится к силовым приводам клапанов и может быть использовано для регулируемых силовых приводов, используемых для управления клапанами, изменяющими поток (расход) текучих сред в магистрали, как правило, по сигналу измерения параметров процесса. Технический результат заключается в достижении высокого уровня точности и надежности регулирования. Привод содержит: приводной электродвигатель с валом двигателя и выходным валом, связанным с валом двигателя и предназначенным для придания движения клапану; систему управления, приспособленную для управления по первому замкнутому контуру обратной связи выходным валом силового привода и включающей контроллер, соединенный с первым датчиком положения, предназначенным для регистрации положения выходного вала силового привода, и со вторым датчиком положения, предназначенным для регистрации положения вала двигателя и приспособленным для определения скорости вала двигателя, причем система управления выполнена с возможностью реагирования на зарегистрированные сигналы с первого и второго датчиков и в соответствии с этим регулирования скорости (положения) двигателя. 21 з.п. ф-лы, 10 ил.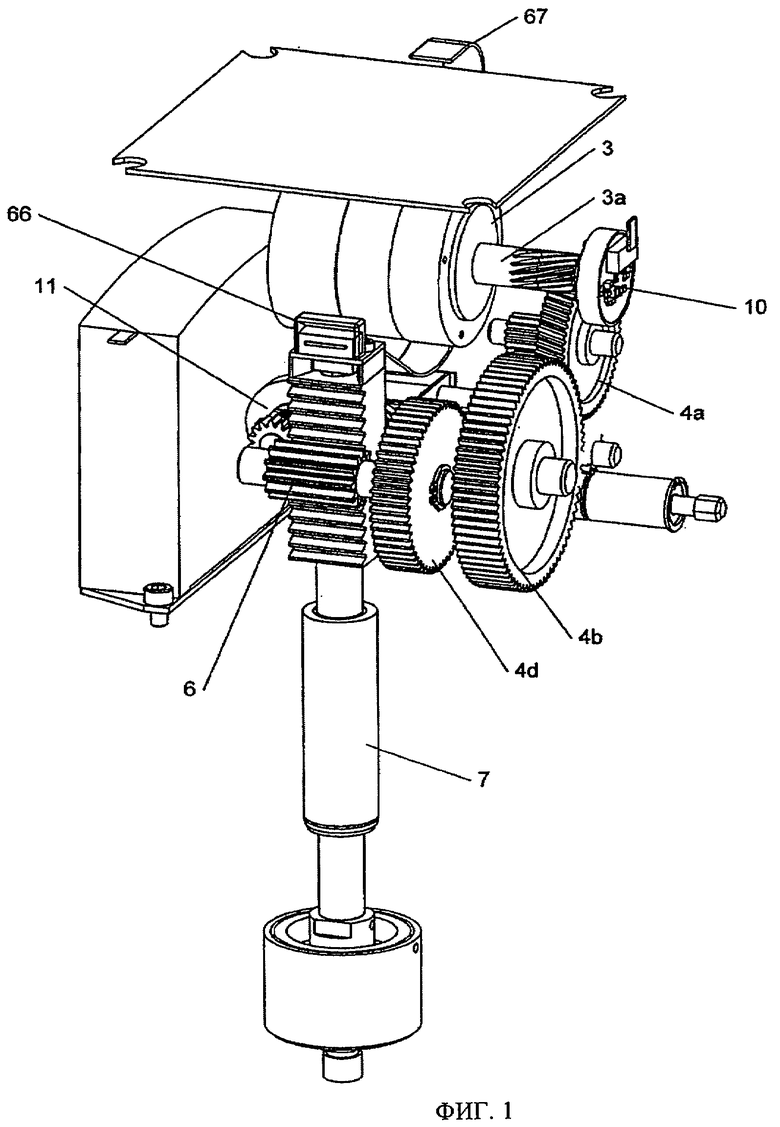
1. Силовой привод клапана, снабженный приводным электродвигателем с валом двигателя и выходным валом, связанным с валом двигателя для придания движения клапану, а также системой управления, обеспечивающей управление по первому замкнутому контуру выходным валом силового привода и включающей контроллер, соединенный с первым датчиком положения, предназначенным для регистрации положения выходного вала силового привода, и со вторым датчиком положения, предназначенным для регистрации положения вала двигателя и приспособленным для определения скорости вала двигателя, причем система управления выполнена с возможностью реагирования на зарегистрированные сигналы первого и второго датчиков и в соответствии с этим регулирования скорости/положения двигателя, а упомянутый контроллер или процессор силового привода, или соединенный с силовым приводом, выполнен с возможностью измерения в процессе работы люфта в приводном механизме, связывающем двигатель с выходным валом, исходя из величины изменения положения второго датчика на момент начала перемещения первого датчика при смене направления движения на обратное.
2. Силовой привод по п.1, в котором чувствительность первого датчика достаточно высока, чтобы регулировать скорость выходного вала с точностью до по меньшей мере двух процентов от полной рабочей скорости выходного вала.
3. Силовой привод по п.1 или 2, в котором контроллер приспособлен для опроса первого и (или) второго датчика с периодом, меньшим одной пятой механической постоянной времени двигателя.
4. Силовой привод по п.1, включающий второй замкнутый контур управления, использующий второй датчик положения и приспособленный для регулирования скорости двигателя, причем во втором замкнутом контуре управления требуемая скорость вырабатывается на основании величины люфта, представляющего собой люфт в механической связи между двигателем и выходным валом.
5. Силовой привод по п.1, содержащий преобразователь, такой как преобразователь осевого усилия, расположенный у удаленного конца выходного вала, причем выходной вал имеет внутренний канал, дающий возможность внутренней прокладки кабеля связи между преобразователем и основным корпусом силового привода.
6. Силовой привод по п.1, в котором контроллер или процессор силового привода, или соединенный с силовым приводом, приспособлен для измерения в процессе работы износа в механическом приводе на основе выходного сигнала второго датчика, полученного при определенном положении первого датчика.
7. Силовой привод по п.1, содержащий узел реечной передачи, где зубчатая рейка связана с выходным валом, а зубчатое колесо приводится в движение двигателем, что при работе создает регулируемое осевое возвратно-поступательное движение выходного вала, причем силовой привод содержит также опорную консоль или подпорку, приспособленную для регулируемого выдвижения в направлении оси вала и размещенную вблизи той части вала, на которую воздействует зубчатое колесо/зубчатая передача приводного механизма, что обеспечивает сохранение ориентации оси вала и устранение люфта в узле реечной передачи.
8. Силовой привод по п.1, имеющий линейный выход и приводной электродвигатель, присоединенный соответствующим образом для линейного перемещения выходного вала силового привода, причем выходной вал заканчивается в преобразователе осевого усилия, имеющем в общем центральную часть первой втулки, соединенную с выходным валом, при этом первая втулка имеет наружное кольцо, приспособленное для соединения непосредственно или косвенно с указанным клапаном, а также выполненную из материала меньшей толщины перегородку, связывающую указанную центральную часть с наружным кольцом и выполненную с возможностью прогиба под действием усилия, приложенного между центральной частью и наружным кольцом, причем преобразователь содержит по меньшей мере один датчик деформации, установленный на перегородке и приспособленный для регистрации деформации перегородки при ее прогибе и, таким образом, при работе дающий индикацию усилия, приложенного выходным валом к регулируемому клапану.
9. Силовой привод по п.8, в котором приводной двигатель связан с выходным валом через зубчатый приводной механизм, передающий движение на зубчатую рейку и зубчатое колесо, связанные с выходным валом или выполненные воедино с ним.
10. Силовой привод по п.8 или 9, в котором в первую втулку помещены электронные компоненты предварительной обработки сигналов, поступающих с датчика деформации или с каждого из датчиков деформации.
11. Силовой привод по п.8, в котором сигнал с датчика деформации или с каждого из датчиков деформации передают по сигнальной цепи, проходящей внутри выходного вала.
12. Силовой привод по п.1, в которой контроллер системы управления обеспечивает управление клапаном по замкнутому контуру, причем силовой привод помещен в корпус, снабженный пользовательским интерфейсом, характеризующийся неинтрузивным приведением в действие, и в корпусе силового привода заключен переключатель, который может быть переведен на начало выполнения обычного регулирования по замкнутому контуру путем приближения к наружной части корпуса простого, неинтрузивного и не имеющего питания средства, такого как, например, магнит.
13. Силовой привод по п.12, в котором для безопасности пользовательский интерфейс выполнен таким образом, что при удалении указанного средства от переключателя выполнение обычных операций приостанавливается.
14. Силовой привод по п.1, снабженный зубчатым приводным механизмом и выходным валом, перемещающим регулирующий клапан между состояниями с различной степенью открытости для регулирования скорости потока текучей среды в трубопроводе, а также блокирующим фиксатором для блокировки одной или более зубчатых колес приводного механизма в определенном положении с обеспечением режима "удержания на месте при потере питания", при котором фиксатор удерживается пружинным средством смещения в зацеплении с зубчатым колесом приводного механизма, из которого перемещается соленоидом, шток которого оттягивает фиксатор из зацепления с зубчатым колесом, преодолевая силу пружинного средства смещения.
15. Силовой привод по п.14, в котором блокирующий фиксатор содержит первое колесо, снабженное одним или более выступающими в осевом направлении блокирующими штифтами, приспособленными для сцепления с одним или более проходящими по радиусу пазами в непрерывно перемещаемом втором колесе, причем первое и второе колесо выполнены с возможностью вращения в параллельных плоскостях, и плоскость первого колеса подвижна в направлении к плоскости второго колеса до перемещения в блокирующее положение под воздействием средства смещения в случае отсутствия питания на соленоиде, что тем самым приводит к вхождению блокирующего штифта в паз.
16. Силовой привод по п.15, в котором первое колесо содержит приводное средство, такое как шлицованный вал, дающий возможность ручного вращения первого колеса, которое передается через блокирующий штифт, или через каждый блокирующий штифт, второму колесу, когда первое колесо находится в блокирующем положении, и тем самым на выходной вал.
17. Силовой привод по п.1, в котором система управления содержит датчик крутящего момента или осевого усилия, предназначенный для регистрации кутящего момента или осевого усилия на выходном валу, чтобы обеспечить регулирование по замкнутому контуру крутящего момента или осевого усилия, приложенного к клапану, и, кроме того, привод снабжен средством обеспечения работы в отказоустойчивом режиме, предназначенным для перемещения клапана в безопасное положение в случае отказа основного питания и содержащем по меньшей мере один дополнительный высокоемкий конденсатор, приспособленный для подачи питания на электродвигатель и систему управления, чтобы переместить клапан в безопасное положение при сохранении возможности регулирования крутящего момента/осевого усилия.
18. Силовой привод по п.17, в котором общая емкость по меньшей мере одного дополнительного конденсатора больше 30 Ф.
19. Силовой привод по п.17, в котором проводится мониторинг накопления энергии, предназначенной для работы в отказоустойчивом режиме.
20. Силовой привод по п.1, в котором система управления содержит датчик крутящего момента или осевого усилия, предназначенный для регистрации кутящего момента или осевого усилия на выходном валу, чтобы обеспечить регулирование по замкнутому контуру крутящего момента или осевого усилия, приложенного к клапану, причем контроллер или дополнительный процессор, в процессе работы соединенный с контроллером, обеспечивает периодическую регистрацию действительного значения крутящего момента/осевого усилия, и эти данные могут быть доступны для сравнения с накопленными данными/профилями данных.
21. Силовой привод по п.20, в котором контроллер или процессор обеспечивает непрерывное отслеживание коэффициента полезного действия силового привода по входной мощности, определяемой по измерениям тока и напряжения, и выходной мощности, определяемой по осевому усилию/крутящему моменту, скорости и ускорению.
22. Силовой привод по п.21, в котором проводится мониторинг накопления энергии, предназначенной для работы в отказоустойчивом режиме.
| УСТРОЙСТВО для ЗАМЕРА ПЕРЕХОДНОГО СОПРОТИВЛЕНИЯ | 0 |
|
SU393697A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| US 4154482 A, 15.05.1979 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 4373648 A, 15.02.1983 | |||
| МАГНИТНЫЙ СЕПАРАТОР | 2001 |
|
RU2212947C2 |
| Механизм блокировки вращающегося вала | 1983 |
|
SU1143631A1 |
| US 5422808 A, 06.06.1995 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРИВИТЫХ СОПОЛИМЕРОВ | 0 |
|
SU287299A1 |
| ЕР 0730114 A1, 04.09.1996. | |||

