ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к электрическим машинам, в частности к многофазным электрическим двигателям для использования в ступице колеса электромобиля.
УРОВЕНЬ ТЕХНИКИ
Для использования в электромобилях необходимы простые, безопасные и высокоэффективные электрические двигатели, имеющие высокую производительность. Как правило, электрические двигатели подразделяются на электродвигатели высокого и низкого (50В или ниже) напряжения. К используемым в электромобилях высоковольтным электрическим двигателям, которые по-прежнему являются источниками поражения людей и животных электрическим током, предъявляются строгие требования по безопасности, что требует комплексного, а следовательно и затратного решения. Для получения одинаковой мощности низковольтным двигателям необходим более высокий рабочий ток, поскольку мощность есть произведение тока и напряжения. Однако управление обычными низковольтными трехфазными электродвигателями, в обмотках которых протекают большие токи, ставит ряд задач, включая необходимость иметь более мощные кабели и разъемы, более сложный контроллер для коммутации больших токов, а также более высокую емкость и низкую индуктивность. Кроме того, немалое значение приобретают тепловые потери или потери в меди (активное сопротивление катушки × ток обмотки в квадрате), обусловленные активным сопротивлением обмоток.
В WO 2004073157 приведено описание низковольтного электродвигателя с распределенной обмоткой, предназначенного решить эту задачу. В этом двигателе полный ток распределен по нескольким катушкам или обмоткам, что значительно уменьшает ток в обмотке(ах). Тем не менее управление каждой катушкой осуществляется отдельно, что требует наличия сложного контроллера с большим количеством электронных устройств. Описание низковольтного трехфазного электродвигателя, встроенного в колесо, также приведено в GB 2462940 A. Этот двигатель имеет ряд независимо управляемых катушечных групп, размещенных вокруг статора. Каждая катушечная группа состоит из трех катушечных подгрупп, питание каждой из которых осуществляется от разных фаз. Тем не менее каждая катушечная группа использует одни и те же три фазы. Такое устройство способствует некоторому упрощению по сравнению с устройством, описание которого приведено в WO 2004073157, однако контроллер все еще имеет сложную конструкцию, поскольку для каждой катушечной группы требуется наличие независимого контроллера центрального процессора.
Таким образом, хотя использование низковольтных и высоковольтных электродвигателей известно, необходимо обеспечить создание таких двигателей простым и рентабельным способом, не поступаясь высокой эффективностью.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Для решения упомянутых выше и других задач предложен многофазный электродвигатель, содержащий ротор и статор, в котором ротор содержит ряд магнитов, ориентированных в направлении статора, а статор содержит множество фазных обмоток, расположенных вокруг его круговой поверхности и ориентированных в направлении магнитов, причем фазные обмотки соединены с блоками управления с возможностью выборочной подачи тока на фазные обмотки для создания электромагнитной силы, которая действует на магниты ротора, обеспечивая его вращение. Двигатель содержит по меньшей мере два блока управления, каждый из которых выполнен с возможностью управления подачей тока на три фазные обмотки таким образом, что на каждую из трех фазных обмоток подаются разные фазные токи, сдвиг по фазе между которыми составляет 120°. Кроме того, ни один блок управления не использует одну и ту же фазу тока.
За счет использования двух или более блоков управления, каждый из которых по существу действует как простой трехфазный контроллер, управляющий фазами тока, сдвинутыми друг относительно друга на 120°, и управляет различными фазами другого блока или блоков управления, ток может быть распределен по меньшей мере по шести фазам. Таким образом, обеспечивается возможность работы при пониженном напряжении без недостатков, связанных с большими токами, и, кроме того, значительно упрощается управление обычными системами.
Питание фазных обмоток предпочтительно осуществляется от одной из m разных фаз тока, где m есть число, кратное трем и по меньшей мере равное 6. Желательно, чтобы сдвиг по фазе между фазами тока составлял 360°/m.
Для обеспечения оптимального управления фазные обмотки предпочтительно расположены вокруг круговой поверхности статора таким образом, что каждую фазную обмотку питает ток, который сдвинут по фазе на 180°+180°/m относительно тока в соседней фазной обмотке. Таким образом, блоки управления не имеют соединения с последовательно расположенными фазными обмотками. Вместо этого фазные обмотки всех катушечных блоков выполнены чередующимися. Следовательно, при использовании двух блоков управления первый блок управления управляет первой, третьей и пятой фазными обмотками, а второй блок управления управляет второй, четвертой и шестой фазными обмотками.
Согласно, в частности, предпочтительному варианту осуществления изобретения фазные обмотки, управляемые одним блоком управления, выбраны из последовательности фазных обмоток следующим образом: если k - число блоков управления, управляющих подачей на фазные обмотки, в общей сложности, m фазных токов, то каждый из k блоков управления выполнен с возможностью управления фазными обмотками i, i+m/3, i+m*2/3, где i - целое число, удовлетворяющее условию 1≤i≤k.
Три фазные обмотки, управляемые каждым блоком управления, могут быть соединены по схеме звезда или треугольник.
Согласно предпочтительному варианту осуществления настоящего изобретения каждый блок управления содержит трехфазную полумостовую схему, обеспечивающую подачу в фазные обмотки токового сигнала, по существу, прямоугольной формы.
Цепи контроллеров такого типа легко проектируются или являются общедоступными и обеспечивают простую, но высокоэффективную форму управления. Простота управления достигается, в частности, за счет использования для питания фазных обмоток сигнала прямоугольной формы, поскольку цепь контроллера в любой момент времени требует энергии только двух из трех подключенных фазных обмоток. Как вариант, трехфазная полумостовая схема может быть выполнена с возможностью использования, по существу, сигнала тока трапецеидальной или синусоидальной формы.
Согласно еще одному варианту осуществления изобретения по меньшей мере один контроллер предназначен для управления работой по меньшей мере одного блока управления. В таком устройстве контроллеры каждого блока управления могут быть независимыми друг от друга или подключены к сети каким-либо образом, обеспечивая обмен информацией.
В предпочтительном варианте осуществления изобретения центральный контроллер управляет работой всех блоков управления, обеспечивая достаточно точное регулирование частоты вращения ротора, путем управления последовательностью подачи на фазные обмотки токов от каждой фазы.
Контроллер или контроллеры предпочтительно используют широтно-импульсную модуляцию.
Согласно другому варианту осуществлению изобретения, каждая фазная обмотка содержит один или более катушечных элементов, соединенных последовательно или параллельно. Каждая фазная обмотка предпочтительно содержит по меньшей мере два катушечных элемента, равномерно распределенных вокруг круговой поверхности статора.
Согласно еще одному аспекту, изобретение относится к электромобилю по меньшей мере с одним колесом, содержащему встроенный в колесо электродвигатель согласно приведенному выше описанию.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дальнейшие задачи и преимущества настоящего изобретения будут определены в приведенном ниже описании, где варианты реализации изобретения будут описаны более подробно в виде примера со ссылкой на чертежи, в которых:
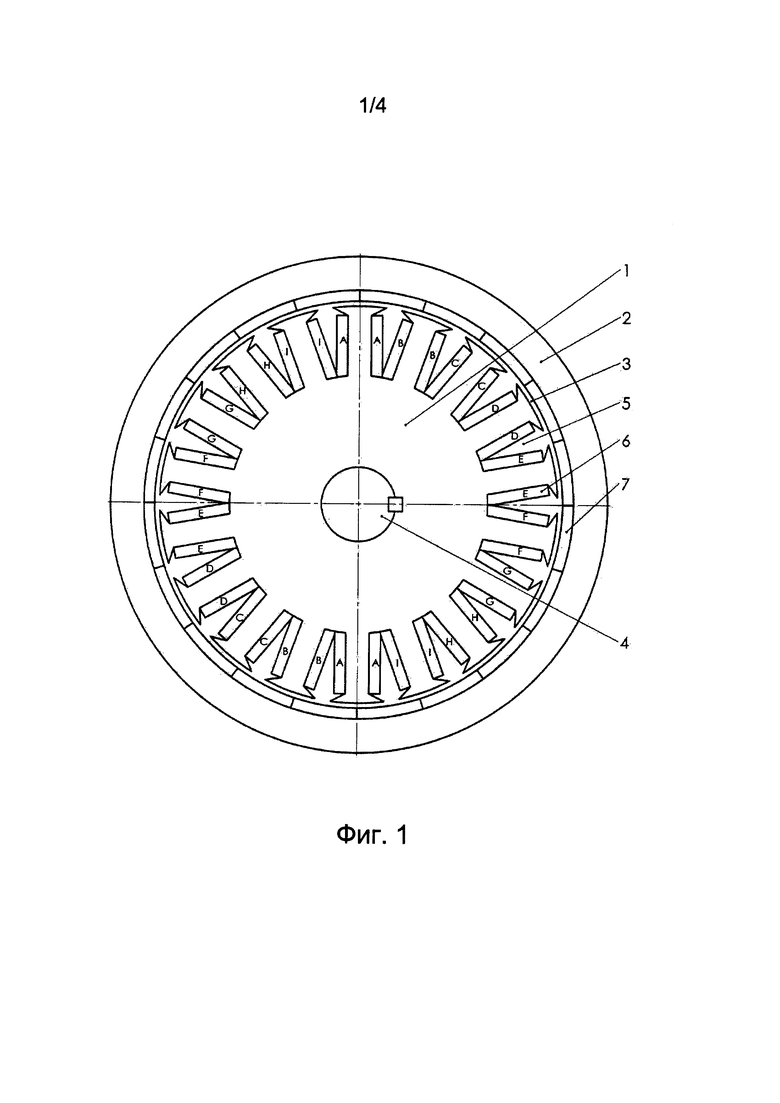
на фиг. 1 схематично показан многофазный встроенный в колесо электродвигатель согласно варианту осуществления настоящего изобретения,
на фиг. 2а показаны сигналы индуцированного напряжения для последовательно расположенных фазных обмоток каждой фазы многофазного электродвигателя,
на фиг. 2b показаны формы сигналов тока возбуждения для последовательно расположенных фазных обмоток многофазного электродвигателя,
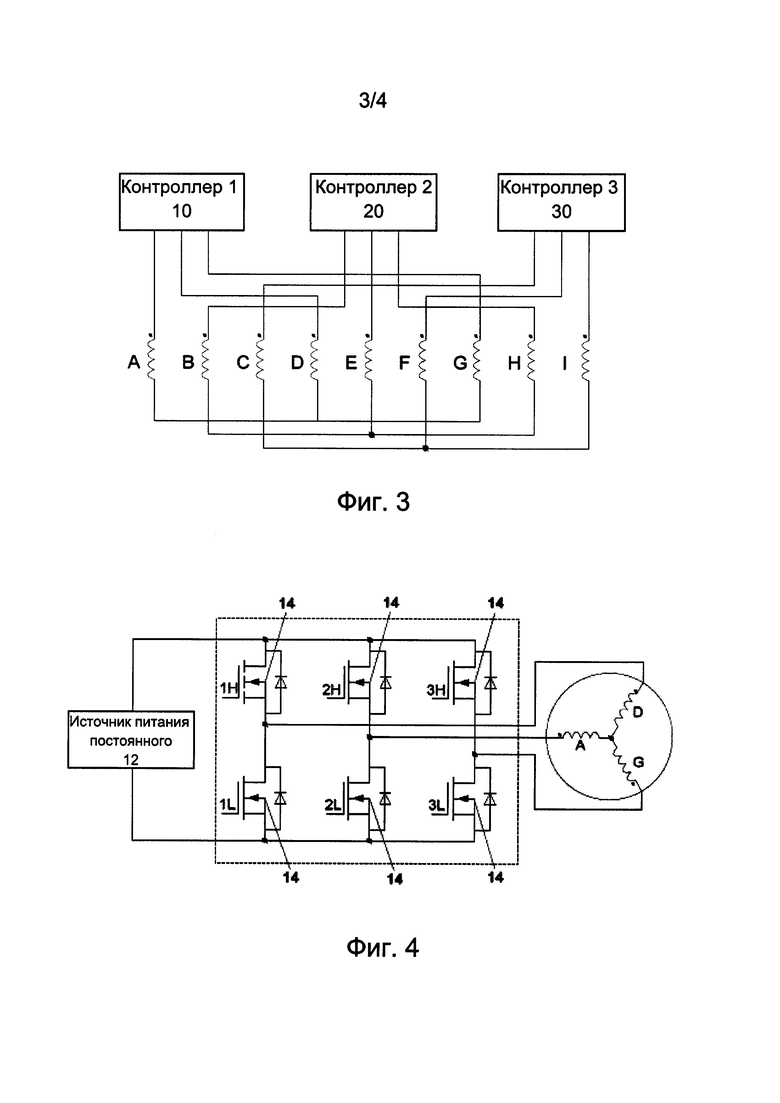
на фиг. 3 схематично показано трехфазное модульное устройство управления многофазным электродвигателем согласно варианту осуществления изобретения,
на фиг. 4 схематично показан один трехфазный модульный блок управления, а
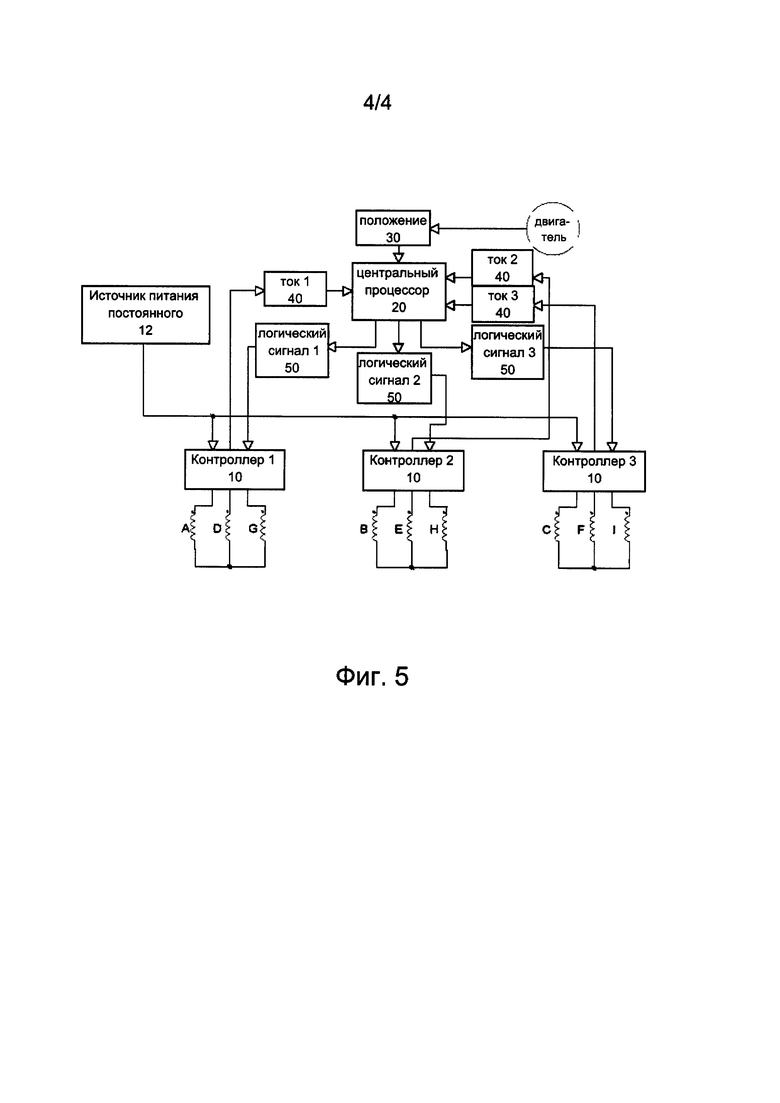
на фиг. 5 схематично показан центральный блок управления многофазного электродвигателя согласно варианту осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже описании предмет изобретения именуется как электрической машиной, так и электродвигателем. Под термином "электрическая машина" обычно понимают и электродвигатель, и электрический генератор. Тем не менее в контексте настоящего изобретения термин электродвигатель не ограничен устройством, преобразующим электрическую энергию в движение, но относится также и к устройству, вырабатывающему электроэнергию за счет движения. Таким образом, в описании настоящего изобретения термины электрическая машина и электрический генератор используются равнозначно, без каких-либо различий в их значении. На всех чертежах, упомянутых в приведенном ниже описании, одинаковым элементам присвоены одинаковые номера позиций.
На фиг. 1 показана электрическая машина, предназначенная для встраивания в колесо, то есть для установки в ступице колеса электромобиля. Машина содержит внутренний неподвижный статор 1 и внешний ротор 2, выполненный с возможностью вращения вокруг статора 1. Между ротором 2 и статором 1 выполнен маленький воздушный промежуток 3. В иллюстрированном варианте осуществления изобретения ротор расположен снаружи внутреннего статора, однако следует учесть, что возможно изменение положения этих элементов, т.е. вращающийся ротор может быть расположен внутри наружного неподвижного статора. Внутренний статор 1 выполнен из магнитного материала и закреплен на валу 4. По внешней окружности статора 1 выполнен ряд пазов 5, в которых расположены (сконцентрированы) катушечные элементы 6. Пазы 5 по существу образуют выступающие участки, вокруг которых расположен катушечный элемент 6. В иллюстрированном варианте осуществления изобретения статор 1 имеет 18 пазов 5 и таким образом обеспечен 18-ю катушечными элементами 6. Вращение ротора 20 вокруг статора способствует наведению в каждом катушечном элементе 6 напряжения или ЭДС, отличающегося по фазе от напряжения, индуцированного в соседних катушечных элементах 6. В иллюстрированном варианте осуществления изобретения катушечные элементы имеют напряжения, индуцированные на девяти различных фазах, обозначенных на фиг. 1 буквами А, В, С, D, Е, F, G, Н и I. Кроме того, два катушечных элемента 6 будут иметь одинаковое по фазе индуцированное напряжение. Эти два катушечных элемента 6 расположены на статоре диаметрально противоположно. Например, на фиг. 1 два катушечных элемента с одинаковым по фазе индуцированным напряжением расположены в центре, на пунктирной линии, которая пересекает радиус статора по вертикали. В варианте осуществления настоящего изобретения два элемента 6 каждой фазы соединены между собой последовательно, хотя возможно также и параллельное соединение. Понятно, что существуют варианты осуществления, в которых питание всех размещенных на статоре катушечных элементов осуществляется от разных фаз. Также существуют варианты осуществления, в которых более двух катушечных элементов соединены между собой, а их питание осуществляется от одной и той же фазы. Для целей настоящего описания каждый катушечный элемент или группа катушечных элементов, ток возбуждения или индуцированное напряжение которых одинаковы по фазе, будет называться в дальнейшем, фазной обмоткой 6.
Ротор 2 также выполнен из магнитного материала, например стали, и имеет 20 магнитов 7, закрепленных на внутренней поверхности. Магниты расположены с чередованием диаметрально противоположной полярности N-S и S-N и отделены друг от друга очень малым промежутком. Число магнитов 7, по существу, зависит от выбранной конструкции, однако важно, чтобы магниты 7 и катушки ни в коем случае не располагались точно по одной линии, поскольку возможен останов двигателя в положении, при котором не возникает никаких вращательных усилий. Кроме того, момент трогания можно уменьшить путем выбора числа магнитов, приближенного к числу катушечных элементов 6.
Вращение ротора 2 вокруг статора 1 обеспечивает прохождение магнитов 7 мимо катушечных элементов 6 и изменение магнитного потока, вызывающее наведение в элементах 6 переменного напряжения или эдс. На фиг. 2а показаны девять сигналов напряжения, UA, UB, UC, UD, UE, UF, UG, UH и Ui, индуцированного в фазных обмотках 6 каждой из девяти фаз от А до I за один период перемещения ротора 2 вокруг статора 1. За полный оборот ротора 2 вокруг статора проходит несколько периодов напряжения. В частности (электрический) период соответствует периоду вращения/числу пар магнитов. Как показано на фиг. 2а, индуцированное напряжение представляет собой периодический сигнал трапецеидальной формы, который зависит от углового положения ротора 2. На фиг. 2а показано, что взятое в качестве примера индуцированное напряжение UA, возникающее на фазной обмотке А, равно 0 В в начале периода, т.е. при 0°, а затем линейно возрастает на участке от 0° до 30°, где оно имеет постоянное положительное значение. Это значение сохраняется до угла 150°, линейно уменьшается на участке от 150° до 210°, после чего напряжение достигает постоянного отрицательного значения. Это значение сохраняется до угла 330°, после чего напряжение линейно увеличивается и достигает значения 0 В в конце периода, когда угол равен 360°. Напряжение каждой последующей фазы отстает от напряжения предыдущей на 200° (т.е. на абсолютную величину угла 20° и инвертирование), так что индуцированное напряжение на фазной обмотке В уменьшается на участке от 20° до 50°, где оно достигает постоянного отрицательного значения. Как правило, сдвиг по фазе между геометрически прилегающими фазными обмотками можно определить как 180°+180m, где m - число фаз. Таким образом, для двигателя, имеющего 6 фаз, фазовый угол между соседними фазными обмотками составит 210°, а для двигателя, имеющего 12 фаз, фазовый угол будет равен 195°.
Хотя в иллюстрированном варианте осуществления изобретения, индуцированное напряжение по существу имеет трапецеидальную форму, оно зависит от ряда известных факторов, включая размер и форму магнитов, геометрию статора, тип обмоток и т.д., так что специалисты в данной области могут модифицировать машину для получения индуцированного напряжения другой формы путем видоизменения элементов конструкции.
Для обеспечения вращения электрического двигателя питание током каждой фазной обмотки 6 должно осуществляться в правильном последовательном порядке. Идеальный сигнал тока должен иметь ту же форму и знак, что и сигнал индуцированного напряжения, показанный на фиг. 2а, однако в простом регуляторе тока наиболее часто используется сигнал прямоугольной формы, поскольку его проще всего обеспечить. На фиг. 2b показаны типичные токовые сигналы IA, IB, IC, ID, IE, IF, IG, IH и II, подаваемые на каждую катушечную обмотку A-I. Следует отметить, что за счет сигнала прямоугольной формы ток каждой фазы имеет постоянное значение в течение 2/3 всего периода в тех местах, которые соответствуют пику индуцированного напряжения, и равен нулю в течение остальной трети периода. Взятый в качестве примера сигнал тока, подаваемый на первую фазу, имеет нулевое значение на участке от 0° до 30°, постоянное положительное значение, I0, на участке от 30° до 150°, вновь нулевое значение на участке от 150° до 210°, постоянное отрицательное значение, -I0, на участке от 210° до 330° и наконец, нулевое значение на участке между 330° и 360°. Сигнал тока каждой последующей фазы сдвинут на 200° (то есть на 20° и инвертирование).
Таким образом, распределение тока по девяти фазам позволяет получить соответствующую последовательность коммутаций тока для управления двигателем с минимальной пульсацией крутящего момента. Отмечается, что за счет использования фаз, число которых кратно трем, но по меньшей мере равно шести, можно в несколько раз уменьшить пульсацию крутящего момента по сравнению с двигателями с тремя или меньшим количеством фаз. Кроме того, токовыми сигналами можно легко управлять рассмотренным ниже способом.
На фиг. 3 показана схема, иллюстрирующая управление по току различными фазовыми обмотками. Согласно настоящему изобретению для создания управляющего тока или тока возбуждения различных фазных обмоток 6 используются независимые блоки 10 управления, каждый из которых управляет тремя различными фазами. На фиг. 3 показаны три блока 10 управления, каждый из которых соединен с тремя фазными обмотками, питание которых осуществляется от трех различных фаз. Три фазные обмотки выбраны таким образом, что сдвиг по фазе между токами и фазными напряжениями, индуцированными в фазных обмотках, составляет 120°. Следует признать, что геометрическая последовательность фазных токов, показанная на фиг. 2b, отличается от последовательности в электрической области (домене). В электрической области (домене) девять фаз сдвинуты последовательно на 40° (то есть на 360°, деленные на число фаз). Фазы тока (фиг. 2b) имеют следующую последовательность чередования фаз Ic, IE, IG, II, IB, ID, IF и IH. Таким образом, первый трехфазный блок 10 управления (контроллер 1) управляет током фаз A, G и D. Второй блок 10 управления (контроллер 2) управляет током фаз В, Н и Е, а третий блок 10 управления (контроллер 3) управляет током фаз С, I и F. Три фазные обмотки соединены с каждым блоком 10 управления по схеме звезда. Однако они также могут быть соединены по схеме треугольник. Направление (ориентация) каждой катушки показано точкой на фиг. 3, а также на фиг. 2 и 4. Выбор трех фаз, сдвинутых друг относительно друга на 120°, позволяет использовать простой метод трехфазного управления, обычно используемый в бесщеточных электродвигателях постоянного тока (известных также как BLDC двигатели), в которых в любой момент времени проводящими являются только две фазы. В качестве иллюстрации приведена фиг. 2b. Рассматривая сигналы тока, питающего фазные обмотки 6 A, G и D, становится очевидно, что в любом одном угловом положении ток в одной фазной обмотке 6 будет равен нулю, а на две остальные обмотки будут поданы максимальные токи (пики тока) противоположной полярности. Например, при угле в 180° на фазную обмотку А не будет поступать ток возбуждения, на фазную обмотку D будет подан ток возбуждения положительной полярности, а на фазную обмотку G будет подан ток возбуждения отрицательной полярности. Очевидно, что это неприменимо в случае использования сигналов более сложных форм, например трапецеидальных или синусоидальных, но приемлемо для прямоугольных сигналов.
Этот модульный принцип управления токами фазной обмотки может быть использован в любой многофазной конфигурации, где число фаз кратно 3, то есть m=k*3, где k - целое число, большее или равное 2, а m - число фаз. Таким образом, такое модульное трехфазное управление может быть применено при использовании, например, 6, 9, 12, 15, 18 или более фаз. В целом, для m фазных обмоток со сдвигом по фазе 360/m необходимы k блоков управления. Кроме того, каждый из k блоков управления будет управлять катушечными обмотками i, i+m/3, i+m*2/3, где i - целое число, удовлетворяющее условию 1<i<k. Применительно к примеру осуществления настоящего изобретения, показанному на фиг. 1, первый блок 10 управления управляет 1-й, 4-й и 7-й катушечными обмотками 6, которые соответствуют A, D и G. Второй блок 10 управления управляет 2-й, 5-й и 8-й фазными обмотками, что соответствует В, Н и Е, а третий блок 10 управления управляет 3-ей, 6-й и 9-й фазными обмотками, что соответствует С, I и F.
Хотя в примере осуществления настоящего изобретения токи возбуждения имеют прямоугольную форму, следует учесть, что другие периодические функции могут быть использованы для управляющего тока в каждых трехфазных блоках 10 управления, при необходимости их адаптации к другим магнитным двигателям, включая, в том числе, сигналы трапецеидальной и синусоидальной формы. Управление каждым блоком 10 управления может осуществляться независимо от других блоков.
Хотя блок 10 управления, показанный на фиг. 3, соединен только с тремя фазными обмотками, следует понимать, что каждая показанная катушка отражает (отображает) все фазные обмотки, на которые подается питание от одной и той же фазы тока.
На фиг. 4 показан один трехфазный блок 10 управления. Как показано на фиг. 4, три катушечных обмотки катушки A, D и G соединены между собой по схеме звезда (Y-конфигурация). Для управления током трех фаз блок управления содержит шесть полупроводниковых коммутационных элементов 14, включенных в полумостовую схему и соединенных с источником постоянного тока 12. В показанном варианте осуществления изобретения, этими коммутационными элементами служат полевые транзисторы со структурой металл - оксид - полупроводник (МОП-транзисторы), хотя может быть использована и другая полупроводниковая технология, например биполярные транзисторы с изолированным затвором. Управление коммутационными элементами 14 осуществляется логическими сигналами 1L, 1Н, 2Н, 2L, 3Н, 3L, создаваемыми внешним блоком управления (см. фиг. 5). Структура и функция трехфазного блока управления такого типа хорошо известны специалистам в области управления электродвигателями, поэтому их подробное описание в настоящем документе не приводится. По существу, управляющие сигналы управляют коммутационными элементами попарно, обеспечивая одновременное соединение двух выводов катушечных обмоток с источником постоянного тока. Каждый коммутационный элемент 14 находится в рабочем состоянии в течение одной трети периода времени.
Как показано на фиг. 5, блок 20 обработки данных (ЦПУ) вырабатывает управляющие сигналы для каждого коммутационного элемента 100. Блок 20 обработки данных имеет различные интерфейсы 30, 40, 50, через которые осуществляется прием сигналов и их передача различным элементам в двигателе или блоках 10 управления. В частности, блок 20 обработки данных получает от двигателя данные о положении через интерфейс 30 данных позиционирования. Эти данные о положении характеризуют положение ротора 2 относительно статора 1. Кроме того, блок 20 обработки данных через интерфейс текущих данных получает информацию о токе, измеренном в каждом блоке 10 управления. Использование в каждом блоке управления простого трехфазного управления обеспечивает возможность определения тока только одной фазы, то есть тока, протекающего через любую одну обмотку. В случае использования сигнала тока трапецеидальной или другой периодической формы, необходимо измерять в каждом модуле токи по меньшей мере в двух фазах. И, наконец, блок 20 обработки данных посылает управляющие сигналы на каждый блок 10 управления через интерфейс 50 управления по току. На основе измеренных параметров, характеризующих положение, полученных через интерфейс данных позиционирования и параметров тока, измеренного в каждом модуле, полученных через интерфейс 40 текущих данных, блок 20 обработки данных посылает управляющие сигналы на каждый блок 10 управления через интерфейс 50 управления по току, обеспечивая заданные последовательность коммутации фазного тока и величину фазного тока. Используется общепринятый алгоритм управления быстрой коммутацией коммутационных элементов, как например, широтно-импульсная модуляция (ШИМ).
Использование модульных блоков управления и общего блока обработки данных подразумевает существенное сокращение аппаратных средств для многофазных электроприводов.
Кроме того, за счет соответствующего выбора фаз можно простым способом управлять любыми фазами, число которых кратно трем, обеспечивая оптимальное распределение тока в электрическом двигателе низкого напряжения.
Хотя в варианте осуществления настоящего изобретения работой всех блоков 10 управления управляет один общий блок 20 обработки данных или контроллер, следует понимать, что эта функция может быть осуществлена отдельными специализированными устройствами управления, обеспечивающими управление одним или более блоками управления в ответ на позиционные сигналы и сигнал измеренного тока.
Как уже было разъяснено со ссылкой на фиг. 1 и 3, последовательное расположение фазных обмоток A-I отличается от порядка фаз в электрической области (домене).
Однако настоящее изобретение не ограничивается конкретным расположением в пространстве, показанным в варианте осуществления изобретения. Фазные обмотки предпочтительно могут быть расположены в последовательности, которая отображает увеличение сдвига по фазе в электрической области (домене), или в другой схеме расположения.
Следует понимать, что изобретение не ограничивается определенным вариантом осуществления настоящего изобретения, а рассмотренное выше устройство может использоваться в серии различных электрических машин, включая, в том числе, PSMS электрическую машину, реактивные электрические машины и линейные электродвигатели.
Позиционные обозначения
1. Статор
2. Ротор
3. Воздушный промежуток
4. Опорный вал
5. Паз
6. Фазная обмотка
7. Магнит
10. Блок управления
12. Источник постоянного тока
14. Коммутационный элемент
20. Процессор ЦПУ
30. Интерфейс данных позиционирования
40. Интерфейс текущих данных
50. Интерфейс управления по току
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МОДУЛИРОВАННОЙ МДС ЯКОРЯ | 2009 |
|
RU2414792C1 |
| БЕСКОНТАКТНАЯ СИНХРОННАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МОДУЛИРОВАННОЙ МДС ЯКОРЯ | 2009 |
|
RU2414040C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2380814C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| СИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С МОДУЛИРОВАННОЙ МДС ЯКОРЯ | 2009 |
|
RU2414790C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С МОДУЛИРОВАННОЙ МДС ЯКОРЯ | 2009 |
|
RU2414789C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| МОДУЛЬНАЯ СИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414039C1 |

Предложен многофазный электрический двигатель, который содержит ротор и статор. Ротор содержит ряд магнитов, ориентированных в направлении статора, содержащего, в свою очередь, множество фазных обмоток, ориентированных в направлении магнитов. Фазные обмотки соединены с блоками управления с возможностью выборочной подачи тока на фазные обмотки для создания электромагнитной силы, которая действует на магниты ротора и обеспечивает его вращение. Двигатель содержит по меньшей мере два блока управления, каждый из которых выполнен с возможностью управления подачей тока на три фазные обмотки таким образом, что на каждую из трех фазных обмоток подают разные фазные токи, сдвиг по фазе между которыми составляет 120°, а ни один из двух блоков управления не использует одну и ту же фазу тока. Распределение тока по меньшей мере по шести фазам и использование двух или более блоков управления, работающих как простые трехфазные двигатели, обеспечивает возможность работы при пониженном напряжении без недостатков, связанных с большими токами, и, кроме того, значительно упрощает управление обычными системами. 2 н. и 10 з.п. ф-лы, 5 ил.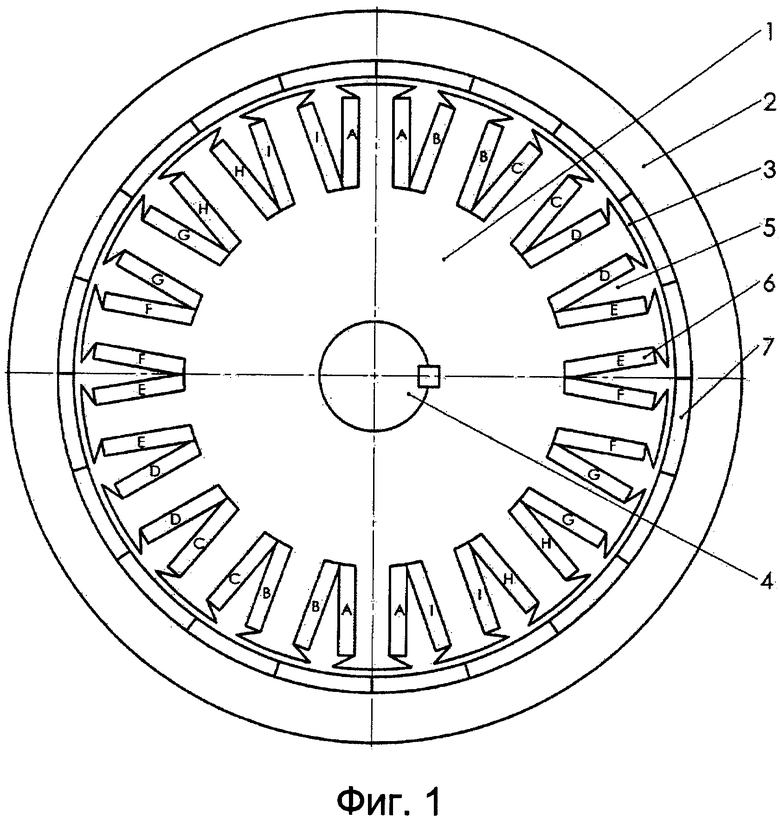
1. Многофазный электрический двигатель, содержащий ротор (2) и статор (1), в котором ротор содержит ряд магнитов (7), ориентированных в направлении статора (1), а статор содержит множество фазных обмоток (6), расположенных вокруг его круговой поверхности и ориентированных в направлении магнитов,
при этом фазные обмотки (6) соединены с блоками (10) управления, выполненными с возможностью выборочной подачи тока на фазные обмотки для создания электромагнитной силы, которая действует на магниты ротора, обеспечивая его вращение,
причем двигатель содержит по меньшей мере два блока (10) управления, каждый из которых выполнен с возможностью управления подачей тока на три фазные обмотки (6) таким образом, что на каждую из трех фазных обмоток подаются разные фазные токи, сдвиг по фазе между которыми составляет 120°,
ни один из двух блоков управления не использует одну и ту же фазу тока,
питание фазных обмоток (6) осуществляется от одной из m разных фаз тока, где m - число, кратное трем и по меньшей мере равное 6, а сдвиг по фазе между фазами составляет 360°/m, и
фазные обмотки (6) расположены вокруг круговой поверхности статора (1) таким образом, что каждую фазную обмотку питает ток со сдвигом по фазе на 180° + 180°/m относительно тока в соседней фазной обмотке, где m - общее число фазных токов.
2. Многофазный электрический двигатель по п. 1, в котором если k - число блоков (10) управления, управляющих подачей на фазные обмотки в общей сложности m фазных токов питания на m фазных обмоток, расположенных в последовательности от 1 к m вокруг круговой поверхности статора, то каждый из k блоков управления выполнен с возможностью управления фазными обмотками i, i+m/3, i+m*2/3, где i - целое число, удовлетворяющее условию 1≤i≤k.
3. Многофазный электрический двигатель по любому из пп. 1, 2, в котором три фазные обмотки (10), управляемые каждым блоком (10) управления, соединены между собой по схеме звезда.
4. Многофазный электрический двигатель по любому из пп. 1, 2, в котором три фазные обмотки (10), управляемые каждым блоком (10) управления, соединены между собой по схеме треугольник.
5. Многофазный электрический двигатель по любому из пп. 1, 2, в котором каждый блок (10) управления содержит трехфазную полумостовую схему, обеспечивающую подачу в фазные обмотки (6) энергии с сигналом тока, по существу, прямоугольной формы.
6. Многофазный электрический двигатель по п. 5, в котором указанная трехфазная полумостовая схема выполнена с возможностью подачи на указанные фазные обмотки (6) энергии с сигналом тока, по существу, трапецеидальной или синусоидальной формы.
7. Многофазный электрический двигатель по любому из пп. 1, 2, 6, который дополнительно содержит по меньшей мере один контроллер (20), управляющий работой по меньшей мере одного блока (10) управления.
8. Многофазный электрический двигатель по любому из пп. 1, 2, 6, который дополнительно содержит контроллер (20), управляющий работой всех блоков (10) управления.
9. Многофазный электрический двигатель по п. 7, в котором указанный контроллер (20) использует широтно-импульсную модуляцию (ШИМ).
10. Многофазный электрический двигатель по любому из пп. 1, 2, 6, 9, в котором каждая фазная обмотка (6) содержит один или более катушечных элементов, соединенных последовательно или параллельно.
11. Многофазный электрический двигатель по п. 10, в котором каждая фазная обмотка содержит по меньшей мере два катушечных элемента (6), равномерно распределенных вокруг круговой поверхности статора.
12. Электромобиль по меньшей мере с одним колесом, содержащий встроенный в колесо электрический двигатель согласно любому из пп. 1-11.
| US 2007241699 A1, 18.10.2007 | |||
| US 2003085627 A1, 08.05.2003 | |||
| CN 102868343 A, 09.01.2013 | |||
| US 2013076189 A1, 03.28.2013 | |||
| Электропривод | 1986 |
|
SU1464279A1 |
| EA 200802369 A1, 28.08.2009. | |||

